Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству измерения расстояния и способу измерения расстояния, и более конкретно, к устройству измерения расстояния и способу измерения расстояния, которые детектируют смешанную волну, состоящую из бегущей волны, выводимой из источника сигнала, и отраженной волны, полученной от бегущей волны, отраженной от объекта измерения, и измеряют расстояние до объекта измерения.
Уровень техники
В качестве обычных устройств измерения расстояния известно использование электрической волны, импульсного радара, радара FMCW (НЧМС, непрерывный частотно-модулированный сигнал) и других радаров.
Импульсный радар передает импульсный сигнал, измеряет время, в течение которого этот импульсный сигнал отражается объектом измерения, и определяет расстояние до объекта измерения. Кроме того, радар FMCW передает непрерывный сигнал с колебанием частоты и измеряет расстояние до объекта измерения по разности частот между переданными сигналами и отраженными сигналами. В дополнение к этому существуют радар с расширенным спектром, радар с кодированным импульсом и другие, но эти радары измеряют расстояние на основе времени распространения сигналов до измеряемого объекта и обратно, как и в случае импульсного радара.
Одновременно с этим, упомянутые выше радары, в принципе, измеряют время распространения сигналов до измеряемого объекта и обратно и имеют недостаток, связанный с тем, что их разрешающая способность составляет несколько десятков метров, поэтому трудно выполнять измерения на близком расстоянии в пределах нескольких десятков метров. Кроме того, в связи с тем, что радар FMCW измеряет расстояние до объекта измерения по разности частот между переданными сигналами и отраженными сигналами, в нем возникает проблема, связанная с необходимостью поддержания линейности изменения частоты передаваемых сигналов, а также проблема "фальшивого объекта", связанная с утечкой передаваемых сигналов на сторону приема; в нем также требуется (на высоком уровне) поддерживать точность выходных сигналов для удовлетворения линейности изменения частоты, требуется использовать отдельные антенны для стороны приема и стороны передачи с тем, чтобы исключить утечку передаваемых сигналов на сторону приема, для исключения возникновения явления "фальшивого объекта" и других проблем, кроме того, на этой основе трудно построить простую конструкцию.
Таким образом, существует устройство измерения расстояния, такое как показано на фиг. 23, которое основано на концепции, состоящей в том, что стоячая волна генерируется в случае, если существует отражение (отраженная волна) от объекта измерения, когда электромагнитную волну, которая имеет только один частотный компонент, передают к объекту измерения, в качестве бегущей волны, от источника генерирования электромагнитной волны; устройство передает электромагнитную волну, которая имеет только один частотный компонент, к объекту измерения, одновременно ступенчато переключая частоту, детектирует стоячую волну, генерируемую при возникновении интерференции между передаваемой волной и волной, отраженной от объекта измерения, и определяет расстояние между точкой детектирования и объектом измерения на основе результата расчета переменного периода амплитуд этой стоячей волны (см. патентный документ 1).
Устройство измерения расстояния, описанное в патентном документе 1, детектирует стоячую волну, генерируемую при возникновении интерференции между бегущей волной, которая имеет только один частотный компонент, и отраженной волной, получаемой в результате отражения бегущей волны от объекта измерения; поэтому в устройстве измерения расстояния не требуется предотвращать утечку передаваемого сигнала на сторону приема, как в случае радара FMCW, и т.д., и может быть построена простая конструкция. Кроме того, по сравнению с импульсным радаром, радаром FMCW и другими радарами, устройство измерения расстояния, представленное в патентном документе 1, позволяет выполнять точные измерения, даже при измерениях на близком расстоянии.
Устройство измерения расстояния, представленное в патентном документе 1, однако, эффективно, когда скорость перемещения между объектом измерения и устройством измерения расстояния относительно мала, и расстоянием перемещения в пределах времени измерения можно пренебречь, но когда скорость перемещения между объектом измерения и устройством измерения расстояния велика, и расстоянием перемещения в пределах времени измерения пренебречь нельзя, с помощью такого устройства измерения расстояния трудно получить правильно измеренные значения из-за эффекта Доплера.
Для точного измерения расстояния до движущегося объекта измерения используется устройство измерения расстояния, которое увеличивает и уменьшает частоту сигнала, которое имеет только один частотный компонент, соответствующий заданному ступенчатому переключению частоты, передает его в виде бегущей волны, детектирует амплитуду стоячей волны, генерируемой в результате интерференции между такой бегущей волной и отраженной волной, образовавшейся при отражении бегущей волны от объекта измерения, рассчитывает сигналы, которые соответствуют детектируемой амплитуде, и определяют расстояние между точкой детектирования и объектом измерения (см., например, патентный документ 2 и непатентный документ 1).
Устройство измерения расстояния, описанное в патентном документе 2 и непатентном документе 1, позволяет рассчитывать сигналы, которые соответствуют амплитуде стоячей волны, генерируемой в результате интерференции между бегущей волной, частота которой повышается и понижается в соответствии с заданным ступенчатым переключением частоты, и отраженной волной, и одновременно измерять расстояние между точкой детектирования и объектом измерения, а также относительную скорость объекта измерения. Кроме того, в случае устройства измерения расстояния, представленного в патентном документе 1, расстояние между точкой детектирования и объектом измерения определяют путем использования стоячей волны, и при этом может быть получена простая конструкция устройства измерения расстояния.
Патентный документ 1: Публикация № 2002-357656 находящейся на экспертизе заявки на японский патент
Патентный документ 2: Публикация № 2004-325085 находящейся на экспертизе заявки на японский патент
Непатентный документ 1: Short-Range High-Resolution Radar Utilizing Standing Wave for Measuring of Distance and Velocity of a Moving Target," FUJIMORI Shingo, UEBO Tetsuji, and IRITANI Tadamitsu, IEICE Transactions, vol. J87-B, No. 3, pp. 437-445, March 2004.
Сущность изобретения
Решаемые технические проблемы
В устройстве измерения расстояния, представленном в патентном документе 2 и непатентном документе 1, когда измеряемый объект представляет собой единичный объект как расстояния до измеряемого объекта, так и относительную скорость можно измерять с высокой точностью; однако, в случае, когда существует множество объектов измерения, расстояние между объектами измерения мало и разность скоростей велика, расстояние до каждого объекта измерения невозможно определить однозначно, и иногда получают ошибочные результаты измерения.
Кроме того, в устройстве измерения расстояния, в котором используется стоячая волна, описанном в упомянутых выше патентных документах 1 и 2, а также в непатентном документе 1, частота сигнала, выводимого из источников сигнала, изменяется ступенчато, таким образом, что сигнал (волновые колебания) с частотой fa в определенной полосе частот выводят в течение периода Δt, как показано на фиг. 23, и после этого выводят сигнал с частотой fa+Δf в течение периода Δt. Сигнал, выводимый источником сигнала, передают через передающую антенну и т.д., отражается объектом измерения и возвращается, попадая в точку детектирования как отраженная волна. В таком случае, бегущая волна с частотой fa и отраженная волна, которая соответствует бегущей волне, с частотой fa, образуют интерференцию, т.е. накладываются друг на друга в точке детектирования; в результате генерируется стоячая волна. Таким образом, стоячая волна не генерируется от момента вывода бегущей волны с частотой fa, до момента времени, когда отраженная волна, которая соответствует этой частоте fa, достигнет точки детектирования, и для генерирования стоячей волны необходимо время от момента излучения бегущей волны с частотой fa, до момента, когда бегущая волна с этой частотой отразится от объекта измерения, и отраженная волна достигнет точки детектирования.
Следовательно, временной интервал Δt переключения частоты невозможно сделать более коротким, чем время от момента, когда частота изменилась, до момента, когда образуется стоячая волна. Устройство измерения расстояния, в котором используется стоячая волна, поэтому рассчитывает спектр расстояния по взаимосвязи между полученным уровнем сигнала и частотой, и получает расстояние до объекта измерения, но когда объект измерения перемещается с относительной скоростью v, происходит девиация пика спектра расстояния из-за эффекта Доплера, и, как показано на фиг. 24, вырабатывается ошибка измерения vΔt/ΔfΔ·f0.
С учетом этих проблем задача заявленного изобретения состоит в создании устройства измерения расстояния и способа измерения расстояния, которые имеют свойства "простой конструкции", "возможности измерения на коротком расстоянии" и "малых ошибок измерения", которые были бы аналогичны устройствам измерения расстояния, в которых используется стоячая волна, и одновременно, в которых фактически отсутствовало бы влияние эффекта Доплера.
Средство решения проблемы
В первом аспекте в соответствии с настоящим изобретением предусмотрено устройство измерения расстояния, которое включает в себя источник сигнала, предназначенный для вывода сигнала, имеющего множество разных частотных компонентов в пределах определенной полосы частот, модуль передачи, предназначенный для передачи сигнала в виде волнового колебания, модуль детектирования смешанной волны, предназначенный для детектирования смешанной волны, состоящей из бегущей волны, включающей в себя либо волновое колебание, передаваемое модулем передачи, или сигнал, выводимый источником сигнала, и отраженной волны, представляющей собой волновое колебание, переданное модулем передачи, отраженное от объекта измерения, модуль анализа частотного компонента, предназначенный для анализа частотного компонента смешанной волны, детектируемой модулем детектирования смешанной волны, и модуль расчета расстояния, предназначенный для определения спектра расстояния путем выполнения в отношении данных проанализированных модулем анализа частотного компонента, дополнительного анализа спектра и, таким образом, расчета расстояния до объекта измерения.
В способе измерения расстояния, в соответствии с настоящим изобретением, передают сигнал, имеющий множество различных частотных компонентов в определенной полосе частот, в виде волнового колебания, детектируют смешанную волну, состоящую из бегущей волны, включающей в себя либо переданное волновое колебание, или сигнал, и отраженной волны в виде переданного волнового колебания, отраженного от объекта измерения, анализирует частотный компонент детектируемой смешанной волны, определяют спектр расстояния дополнительно подвергая данные, проанализированные с использованием анализа частотного компонента, спектральному анализу, и, таким образом, рассчитывая расстояние до объекта измерения.
Следовательно, в связи с тем, что смешанную волну, состоящую из бегущей волны и отраженной волны, детектируют и на основе смешанной волны рассчитывают расстояние до объекта измерения, нет необходимости разделять бегущую волну (передаваемый сигнал) и отраженную волну (принимаемый сигнал), и может быть получено устройство измерения расстояния с простой конструкцией и простое в использовании. Кроме того, в устройстве измерения расстояния, в котором используется стоячая волна, стоячая волна не генерируется от момента изменения частоты и до момента, когда отраженная волна, которая соответствует этой частоте, не вернется в точку детектирования и, кроме того, частота должна переключаться многоэтапно, и поэтому измерение расстояния, в принципе, невозможно выполнять с высокой скоростью, но в заявленном изобретении, в котором не используется стоячая волна, не применяется концепция переключения частоты, и, следовательно, в принципе, не существует время, требуемое для переключения частоты, по сравнению с устройством измерения расстояния, в котором используется стоячая волна, при этом устройство измерения расстояния в соответствии с настоящим изобретением обеспечивает высокоскоростное измерение расстояния.
Источник сигнала может включать в себя множество генераторов одиночной частоты, каждый из которых генерирует разный компонент одиночной частоты, и сумматор, который синтезирует сигналы, генерируемые множеством генераторов одиночной частоты.
Кроме того, источник сигнала может включать в себя генератор одиночной частоты, который генерирует компонент одиночной частоты, и модулятор, который модулирует сигнал, генерируемый генератором одиночной частоты.
Кроме того, источник сигнала может включать в себя источник шума, который выводит частотный компонент в пределах определенной полосы частот.
Модуль анализа частотного компонента может включать в себя АЦ (AD, аналогово-цифровой) преобразователь, который преобразует смешанную волну, детектируемую модулем детектирования смешанной волны, в цифровой сигнал, и процессор сигналов, который анализирует частотные компоненты выходных данных АЦ преобразователя и рассчитывает размер каждого частотного компонента.
Кроме того, модуль анализа частотного компонента может включать в себя множество полосовых фильтров и модуль детектирования уровня, который детектирует выходной уровень полосовых фильтров.
Модуль расчета расстояния может рассчитывать спектр расстояния, подвергая анализируемые данные анализу Фурье в модуле анализа частотного компонента.
Множество модулей детектирования смешанной волны могут быть установлены в разных положениях, модуль анализа частотного компонента может анализировать частотные компоненты для каждой смешанной волны, детектируемой модулями детектирования смешанной волны, и модуль расчета расстояния может рассчитывать спектр расстояния, используя проанализированные данные частотного компонента для множества полученных смешанных волн.
Второй аспект в соответствии с заявленным изобретением направлен на устройство измерения расстояния, которое включает в себя источник сигнала, который выводит частотно-модулированный сигнал, полученный путем модуляции частоты несущей волны с определенной частотой сигналом с произвольной частотой, модуль передачи, который передает частотно-модулированный сигнал в качестве волнового колебания, модуль детектирования смешанной волны, который детектирует смешанную волну, состоящую из бегущей волны, включающей в себя либо волновое колебание, передаваемое модулем передачи, или частотно-модулированный сигнал, выводимый из источника сигнала и отраженной волны в виде волнового колебания, передаваемого модулем передачи, отраженного объектом измерения, модуль детектирования амплитудного компонента, который детектирует амплитудный компонент смешанной волны, детектируемой модулем детектирования смешанной волны, и модуль расчета расстояния, который определяет спектр расстояния путем выполнения дополнительного спектрального анализа в отношении амплитудного компонента, детектируемого модулем детектирования амплитудного компонента и рассчитывает, таким образом, расстояние до объекта измерения.
В способе измерения расстояния, в соответствии с заявленным изобретением, передают сигнал, полученный путем частотной модуляции несущей волны с определенной частотой сигналом с произвольной частотой, в качестве волнового колебания, детектируют смешанную волну, состоящую из бегущей волны, включающей в себя либо переданное волновое колебание, или частотно-модулированный сигнал, и отраженной волны в виде переданного волнового колебания, отраженного от объекта измерения, детектируют амплитудный компонент детектируемой смешанной волны, определяют спектр расстояния, дополнительно подвергая амплитудный компонент спектральному анализу, и рассчитывая, таким образом, расстояние до объекта измерения.
Следовательно, в связи с тем, что смешанную волну, состоящую из бегущей волны и отраженной волны, детектируют и на основе смешанной волны, рассчитывают расстояние до объекта измерения, нет необходимости разделять антенны передающей и приемной сторон для исключения утечки бегущей волны (передаваемого сигнала) на сторону приема, и может быть получено устройство измерения расстояния с простой конструкцией и простое при использовании. Кроме того, в устройстве измерения расстояния, в котором используется стоячая волна, стоячая волна не генерируется от момента переключения частоты до момента, когда отраженная волна, которая соответствует этой частоте, не вернется к точке детектирования и, кроме того, частота должна переключаться многоэтапно, и поэтому, в принципе, невозможно измерение расстояния, с высокой скоростью, но заявленное изобретение, в котором не используется стоячая волна, не содержит концепцию переключения частоты, и, следовательно, в принципе, в нем не требуется время для переключения частоты, и по сравнению с устройством измерения расстояния, в котором используется стоячая волна, устройство измерения расстояния в соответствии с настоящим изобретением обеспечивает возможность высокоскоростного измерения расстояния.
Модуль расчета расстояния может рассчитывать спектр расстояния путем выполнения анализа Фурье для амплитудного компонента, детектируемого модулем детектирования амплитудного компонента.
Множество модулей детектирования смешанной волны могут быть установлены в разных положениях, при этом модуль детектирования амплитудного компонента может детектировать амплитудные компоненты для каждой смешанной волны, детектируемой модулями детектирования смешанной волны, модуль расчета расстояния может рассчитывать спектр расстояния, используя проанализированные данные амплитудного компонента множества полученных смешанных волн.
В третьем аспекте в соответствии с заявленным изобретением предусмотрено устройство измерения расстояния, которое включает в себя источник сигнала, который выводит сигнал с двойной модуляцией, полученный в результате двойной модуляции несущей волны с определенной частотой вторым модулирующим сигналом, заранее частотно-модулированным первым модулирующим сигналом, модуль передачи, который передает сигнал с двойной модуляцией в качестве волнового колебания, модуль детектирования смешанной волны, который детектирует смешанную волну, состоящую из бегущей волны, включающей в себя либо волновое колебание, передаваемое модулем передачи, или сигнал с двойной модуляцией, выводимый из источника сигнала, и отраженной волны в виде волнового колебания, переданного из модуля передачи, отраженного от объекта измерения, модуль детектирования амплитудного компонента, который детектирует амплитудный компонент смешанной волны, детектируемой модулем детектирования смешанной волны, модуль выбора одиночной частоты, который выбирает определенный компонент одиночной частоты из компонентов амплитуды, детектируемых модулем детектирования амплитудного компонента, модуль детектирования уровня сигнала, который детектирует уровень сигнала, полученный модулем выбора одиночной частоты, и модуль расчета расстояния, который рассчитывает расстояние до объекта измерения по уровню сигнала, полученного модулем детектирования уровня сигнала.
В способе измерения расстояния, в соответствии с заявленным изобретением, передают сигнал с двойной модуляцией, полученный в результате двойной модуляции несущей волны с определенной частотой вторым модулирующим сигналом, заранее частотно-модулированным первым модулирующим сигналом, в качестве волнового колебания, детектирует смешанную волну, состоящую из бегущей волны, включающей в себя либо переданное волновое колебание, или сигнал с двойной частотной модуляцией, и отраженной волны в виде волнового колебания, переданного модулем передачи, отраженного от объекта измерения, детектируют амплитудный компонент детектируемой смешанной волны, выбирают один определенный частотный компонент из амплитудных компонентов, детектируют уровень сигнала выбранного частотного компонента и по уровню сигнала рассчитывают расстояние до объекта измерения.
Следовательно, в связи с тем, что смешанную волну, состоящую из бегущей волны и отраженной волны, детектируют, и на основе смешанной волне рассчитывают расстояние до объекта измерения, нет необходимости разделять бегущую волну (передаваемый сигнал) и отраженную волну (принимаемый сигнал), и устройство измерения расстояния может быть получено с простой конструкцией и простым при использовании. Кроме того, в устройстве измерения расстояния, в котором используется стоячая волна, стоячая волна не генерируется от момента переключения частоты до момента, когда отраженная волны, которая соответствует этой частоте, не вернется в точку детектирования, и, кроме того, частоту требуется переключать многоэтапно, и поэтому измерение расстояния, в принципе, невозможно выполнить с высокой скоростью, но в заявленном изобретении, в котором не используется стоячая волна, не применяется концепция переключения частоты и, следовательно, в принципе, не существует время, требуемое для переключения частоты, и по сравнению с устройством измерения расстояния, в котором используется стоячая волна, устройство измерения расстояния в соответствии с настоящим изобретением обеспечивает высокоскоростное измерение расстояния.
Источник сигнала может генерировать первый модулирующий сигнал, который генерирует первый модулирующий сигнал, второй модулирующий сигнал, модулированный первым модулирующим сигналом, и несущую волну, соответственно.
Кроме того, источник сигнала может иметь средство сохранения второго модулирующего сигнала, в котором заранее сохраняют второй модулирующий сигнал.
Или источник сигнала может иметь средство сохранения второго модулирующего сигнала, в котором заранее сохраняют второй модулирующий сигнал, и средство генерирования несущей волны, которое генерирует несущую волну.
Первый модулирующий сигнал может представлять собой сигнал, форма колебаний которого ступенчато повышается или понижается в течение определенного первого периода, и второй модулирующий сигнал может представлять собой сигнал, полученный в результате модуляции пилообразного колебания с более коротким периодом, чем первый период, модулированный первым модулирующим сигналом.
Эффект изобретения
Устройство измерения расстояния и способ измерения расстояния в соответствии с заявленным изобретением, сформированные, как описано выше, детектируют смешанную волну, состоящую из бегущей волны и отраженной волны, отраженной от объекта измерения; при этом нет необходимости предотвращать утечку бегущей волны в приемную антенну, может быть получена простая конструкция, и может быть получено устройство измерения расстояния с малой стоимостью и малым размером.
Кроме того, при определении спектра расстояния по смешанной волне, состоящей из бегущей волны, имеющей множество разных частотных компонентов, и ее отраженной волны, расстояние между объектом измерения и модулем детектирования смешанной волны может быть определено по расстоянию, в спектре которого возникает пик амплитуды.
Когда расстояние до объекта измерения измеряют путем использования стоячей волны, в принципе, невозможно переключать частоту за время, меньшее, чем время, требуемое для формирования стоячей волны, от момента переключения частоты бегущей волны, и, поэтому, измерение подвергается влиянию эффекта Доплера, и генерируется ошибка измерения, но в заявленном изобретении, в принципе, отсутствует концепция переключения частоты, поэтому время наблюдения можно сократить до такого уровня, что влияние эффекта Доплера можно фактически игнорировать, и правильное расстояние можно измерять независимо от скорости перемещения и направления перемещения объекта измерения.
Кроме того, даже когда расстояние между множеством объектов измерения мало, и разность скоростей велика, что трудно измерять устройством измерения расстояния, в котором используется стоячая волна, положение каждого объекта измерения может быть правильно измерено.
Кроме того, множество модулей детектирования смешанной волны установлено в разных положениях, соответственно, и спектр расстояния определяют по множеству смешанных волн, детектируемых множеством модулей детектирования смешанной волны; поэтому можно выполнять измерение расстояния с еще большей надежностью и большей точностью.
Кроме того, когда из источника сигнала выводят сигнал с двойной модуляцией, нет необходимости использовать микропроцессор с большой стоимостью и т.д., который позволяет выполнять анализ спектра с высокой скоростью, и процессор сигналов выполнен как детектор огибающей, квадратичный детектор, синхронный детектор, квадратурный детектор, полосовой фильтр, согласованный фильтр и другие устройства, и детектирует интенсивность спектра расстояния (уровень сигнала), и поэтому при малых затратах может быть получен процессор сигналов, выполняющий обработку со скоростью, почти равной скорости процессора сигналов, в котором используется микропроцессор и т.д. Таким образом, может быть получено устройство измерения расстояния с малой стоимостью и высокой скоростью обработки сигнала.
Краткое описание чертежей
На фиг. 1 показана блок-схема, которая поясняет структуру устройства измерения расстояния в соответствии с первым вариантом воплощения;
на фиг. 2 показана иллюстрация устройства измерения расстояния, которое выполняет моделирование в первом варианте воплощения;
на фиг. 3 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 10 м, и движущегося со скоростью 0 км/ч в первом варианте воплощения;
на фиг. 4 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 10 м и движущегося со скоростью +300 км/ч в первом варианте воплощения;
на фиг. 5 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 40 м и движущегося со скоростью -50 км/ч в первом варианте воплощения;
на фиг. 6 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 5 м и движущегося со скоростью +100 км/ч, а также на расстоянии 12,5 м и движущегося со скоростью -300 км/ч, в первом варианте воплощения;
на фиг. 7 представлена иллюстрация устройства измерения расстояния, оборудованного множеством модулей детектирования смешанной волны, в первом варианте воплощения;
на фиг. 8 представлена блок-схема устройства измерения расстояния, в соответствии со вторым вариантом воплощения;
на фиг. 9 показана иллюстрация устройства измерения расстояния, выполняющего моделирование, в соответствии со вторым вариантом воплощения;
на фиг. 10 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 10 м и движущегося со скоростью 0 км/ч, во втором варианте воплощения;
на фиг. 11 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 10 м и движущегося со скоростью +300 км/ч, во втором варианте воплощения;
на фиг. 12 показан график, на котором представлены результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 40 м и движущегося со скоростью -50 км/ч, во втором варианте воплощения;
на фиг. 13 показан график, на котором показаны результаты моделирования измерения расстояния до объекта измерения, расположенного на расстоянии 5 м и движущегося со скоростью +100 км/ч и расположенного на расстоянии 12,5 м и движущегося со скоростью -300 км/ч, во втором варианте воплощения;
на фиг. 14 представлена иллюстрация устройства измерения расстояния, оборудованного множеством модулей детектирования смешанной волны, во втором варианте воплощения;
на фиг. 15 показана блок-схема, которая поясняет структуру устройства измерения расстояния, в соответствии с третьим вариантом воплощения;
на фиг. 16 показана блок-схема, которая поясняет другой пример источника сигнала в третьем варианте воплощения;
на фиг. 17 показан график, который поясняет форму колебаний второго модулирующего сигнала;
на фиг. 18 показан график, который поясняет форму колебаний первого модулирующего сигнала;
на фиг. 19 представлена иллюстрация устройства измерения расстояния, в котором используется квадратурный детектор, в третьем варианте воплощения;
на фиг. 20 показан график, который представляет результаты моделирования измерения расстояния до объектов измерения, расположенных на расстоянии 12 м и 20 м в устройстве измерения расстояния, в котором используется квадратурный детектор, в третьем варианте воплощения;
на фиг. 21 представлена иллюстрация устройства измерения расстояния, в котором используются полосовые фильтры, в третьем варианте воплощения;
на фиг. 22 показан график, который представляет результаты моделирования измерения расстояния для объектов измерения, расположенных на расстоянии 12 м и 20 м в устройстве измерения расстояния, в котором используются полосовые фильтры, в третьем варианте воплощения;
на фиг. 23 представлена иллюстрация изменения частоты источника сигнала в устройстве измерения расстояния, в котором используется стоячая волна; и
на фиг. 24 представлена иллюстрация, поясняющая влияние эффекта Доплера в устройстве измерения расстояния, в котором используется стоячая волна.
Краткое описание номеров ссылочных позиций
1. Источник сигнала
2. Модуль передачи
3. Модуль детектирования смешанной волны
4. Модуль анализа частотного компонента
5. Модуль расчета расстояния
6. Объект измерения
7. Сигнальный процессор
8. Преобразователь с понижением частоты
8a. Гетеродин
8b. Смеситель
9. Источник сигнала
9a. Источник сигнала несущей волны
9b. Источник модулирующего сигнала
10. Модуль детектирования амплитудного компонента
11. Модуль расчета расстояния
12. Сигнальный процессор
13. Источник сигнала
13a. Источник сигнала несущей волны
13b. Источник второго модулирующего сигнала
13c. Источник первого модулирующего сигнала
13d. Средство генерирования второго модулирующего сигнала
13e. Средство сохранения второго модулирующего сигнала
13f. Средство генерирования сигнала c двойной модуляцией
13g. Средство сохранения сигнала с двойной модуляцией
14. Сигнальный процессор
15. Модуль детектирования амплитудного компонента
16. Модуль выбора одиночной частоты
17. Модуль детектирования уровня сигнала
18. Модуль расчета расстояния
19. Сигнальный процессор
20. Детектор огибающей
21. Квадратурный детектор
22. Модуль детектирования уровня
23. Модуль расчета расстояния
24. Сигнальный процессор
25. Детектор огибающей для детектирования амплитудного компонента
26. Полосовой фильтр
27. Детектор огибающей для детектирования уровня сигнала
28. Модуль расчета расстояния
Подробное описание изобретения
Устройство измерения расстояния и способ измерения расстояния, относящиеся к заявленному изобретению, представлены на фигурах 1, 8 и 15, и предназначены для передачи сигналов, выводимых через источники 1, 9 и 13 сигнала из модуля 2 передачи, в виде волнового колебания, и детектируют смешанную волну без разделения отраженной волны VR этого волнового колебания (бегущей волны VT), отраженной от объекта 6 измерения в модуле 3 детектирования смешанной волны.
Источник сигнала в заявленном изобретении выводит сигнал, который имеет множество различных частотных компонентов в определенной полосе частот, выводит частотно-модулированный сигнал, полученный в результате частотной модуляции несущей волны на определенной частоте произвольным периодическим сигналом, или выводит сигнал с двойной модуляцией, полученный в результате двойной частотной модуляции несущей волны с определенной частотой вторым модулирующим сигналом, который был заранее частотно-модулирован первым модулирующим сигналом. Таким образом, сигналы, выводимые источниками 1, 9 и 13 сигнала, представляют собой сигналы, постоянно имеющие множество различных частотных компонентов.
Кроме того, бегущая волна в заявленном изобретении представляет собой волновое колебание, которое представляет собой сигналы, выводимые из источников 1, 9 и 13 сигнала, которые передает модуль 2 передачи, или сигналы, выводимые из источников 1, 9 и 13 сигнала. Таким образом, бегущая волна в заявленном изобретении представляет собой волновое колебание или сигнал (волну сигнала), которое постоянно имеет множество частотных компонентов. Кроме того, отраженная волна, относящаяся к заявленному изобретению, представляет собой волновое колебание, постоянно имеющее множество частотных компонентов и отраженное от объекта 6 измерения.
Смешанная волна в заявленном изобретении также представляет собой волновое колебание, полученное путем смешения (синтеза) бегущей волны и отраженной волны. Таким образом, волновое колебание, полученное путем наложения бегущей волны, имеющей множество частотных компонентов, на отраженную волну, имеющую множество частотных компонентов, представляет собой смешанную волну в заявленном изобретении, и это не означает волновое колебание, в котором наложено множество волновых колебаний (волн), имеющих компоненты одиночной частоты.
В следующих вариантах воплощения приведено пояснение электромагнитной волны, упомянутой как пример волнового колебания, но волновые колебания света, звуковой волны, тока, волны в материале, которая распространяется внутри материала, и другие представляют собой волновые колебания в соответствии с заявленным изобретением.
Следует отметить, что в устройстве измерения расстояния, в котором используется стоячая волна, как представлено в упомянутых выше патентных документах 1 и 2 и непатентном документе 1 и т.д., сигналы, выводимые из источников сигнала, представляют собой сигналы, частота которых переключается, и в которых компонент одиночной частоты ступенчато изменяется в зависимости от времени, как показано на фиг. 23, и не представляют собой сигналы, которые постоянно имеют множество различных частотных компонентов, как в случае заявленного изобретения. Кроме того, амплитуда волновых колебаний, генерируемых в результате интерференции между бегущей волной, передаваемой на основе сигнала, имеющего компонент одиночной частоты, и отраженной бегущей волны, имеющей этот компонент одиночной частоты, которая была отражена от объекта измерения, не изменяется во времени и получает разные значения в зависимости от положения в пространстве. В частности, амплитуда представлена периодической функцией относительно положения, и это называется стоячей волной.
В интерференции между бегущей волной, которая основана на сигналах, имеющих множество частотных компонентов, и отраженной волной, как в случае заявленного изобретения, взаимозависимость между положением в пространстве и амплитудой смешанной волны изменяется во времени и формирует явление, отличающееся от стоячей волны.
Следовательно, в устройстве измерения расстояния, которое относится к заявленному изобретению, используются физические явления, которые отличаются от явлений, используемых в устройстве измерения расстояния, которое основано на стоячей волне, и они отличаются принципиально.
Первый вариант воплощения
Техническое решение первого варианта воплощения устройства измерения расстояния и способа измерения расстояния, в соответствии с заявленным изобретением, будет описано ниже.
(Техническое решение 1)
На фиг. 1 показана иллюстрация, которая поясняет структуру устройства измерения расстояния, относящегося к заявленному изобретению. Устройство измерения расстояния, относящееся к заявленному изобретению, передает сигнал (бегущую волну VT), выводимый из источника 1 сигнала, в виде волнового колебания из модуля 2 передачи к объекту 6 измерения, детектирует смешанную волну VC, состоящую из отраженной волны VRk, которая была отражена k-м объектом 6 измерения, и бегущей волны VT, в модуле 3 детектирования смешанной волны, анализирует компонент (a(f, xs)) частоты смешанной волны в модуле 4 анализа частотного компонента, рассчитывает спектр R (x) расстояния в модуле 5 расчета расстояния, и измеряет расстояние до объекта 6 измерения.
Источник 1 сигнала выводит сигнал, имеющий множество различных частотных компонентов в определенной полосе частот, и постоянно выводит сигналы, имеющие два или больше частотных компонентов. В качестве конкретного примера, источник 1 сигнала выполнен с использованием множества генераторов одиночной частоты, которые генерируют сигналы разных компонентов одиночной частоты, и сумматора, который синтезирует сигналы компонентов одиночной частоты, генерируемых множеством генераторов одиночной частоты, и сигналы, постоянно имеющие два или больше частотных компонентов, выводят из источника 1 сигнала. Кроме того, источник 1 сигнала может быть выполнен с использованием генератора одиночной частоты, который генерирует компонент одиночной частоты, и модулятора, который накладывает определенную модуляцию, такую как частотная модуляция, амплитудная модуляция и другие виды модуляции, к сигналу, генерируемому этим генератором одиночной частоты, и при этом могут быть выведены сигналы, имеющие разные частотные компоненты в определенной полосе частот. Кроме того, источник 1 сигнала может быть выполнен с использованием источника шумов, который выводит частотные компоненты в определенной полосе частот. Источник шумов, который выводит частотные компоненты в определенной полосе частот, например, может быть получен с использованием полосового фильтра, который передает сигналы в определенной полосе частот, состоящие только из сигналов, выводимых из источника шумов.
Модуль 2 передачи представляет собой двунаправленный элемент, такой как антенна (или электрод), и т.д., который передает сигнал, выводимый из источника 1 сигнала в качестве волнового колебания. В случае, когда модуль 3 детектирования смешанной волны расположен между источником 1 сигнала и модулем 2 передачи, модуль 2 передачи может выполнять роль приема отраженной волны. Модуль 2 передачи выводит волновое колебание частотного компонента, выводимого из источника 1 сигнала, и выводимое волновое колебание передают к объекту 6 измерения.
Таким образом, бегущая волна Vt в заявленном изобретении обозначает волновое колебание, передаваемое из модуля 2 передачи, и сигнал, выводимый из источника 1 сигнала.
Следовательно, в случае, когда смешанная волна, состоящая из сигнала от источника 1 сигнала и сигнала отраженной волны, возвращенной через модуль 2 передачи, детектируется модулем 3 детектирования смешанной волны, сигнал от источника 1 сигнала становится бегущей волной Vt.
Модуль 3 детектирования смешанной волны детектирует смешанную волну VC, состоящую из бегущей волны VT и отраженной волны VRk. Этот модуль 3 детектирования смешанной волны может быть выполнен путем подключения ненаправленного соединителя для детектирования смешанной волны VC, состоящей из бегущей волны VT, выводимой из источника 1 сигнала, и отраженной волны VRk, возвращенной через модуль 2 передачи, в середине питающего фидера, который соединяет источник 1 сигнала с модулем 2 передачи. Кроме того, приемная антенна (или электрод), предназначенная для детектирования смешанной волны VC, состоящей из бегущей волны VT и отраженной волны VRk, установлена в пространстве между модулем 2 передачи и объектом 6 измерения и обозначена как модуль 3 детектирования смешанной волны.
Модуль 4 анализа частотного компонента анализирует частотный компонент смешанной волны Vc, детектируемый модулем 3 детектирования смешанной волны. Также возможно выполнить модуль 4 анализа частотного компонента с использованием множества полосовых фильтров и модуля детектирования уровня, который детектирует выходной уровень полосовых фильтров и анализирует интенсивность каждого частотного компонента.
Кроме того, модуль 4 анализа частотного компонента может быть выполнен на основе АЦ преобразователя, который преобразует смешанную волну, детектируемую модулем 3 детектирования смешанной волны, в цифровой сигнал, и сигнального процессора, в котором установлено программное средство, подвергающее цифровой сигнал, представляющий смешанную волну, выводимый из АЦ преобразователя, анализу частотного компонента, такому как преобразование Фурье и т.д., для расчета интенсивности (абсолютного значения) а(f, xs) каждого частотного компонента.
Таким образом, смешанная волна, детектируемая модулем 3 детектирования смешанной волны, может быть выведена непосредственно в АЦ преобразователь, но преобразователь 8 с понижением частоты (см. Фиг. 2) может быть установлен между модулем 3 детектирования смешанной волны и АЦ преобразователем, и частота может быть введена в АЦ преобразователь после понижения частоты. Что касается преобразователя 8 с понижением частоты, известный преобразователь с понижением частоты является достаточным, и, например, преобразователь с понижением частоты может быть выполнен с гетеродином 8a, который генерирует частоту, которую требуется преобразовать с понижением частоты, и смесителем (преобразователем частоты) 8b, который смешивает смешанную волну Vc, детектируемую модулем 3 детектирования смешанной волны, и периодический сигнал гетеродина 8a для преобразования с понижением частоты до требуемой частоты.
Модуль 5 расчета расстояния подвергает данные, анализируемые модулем 4 анализа частотного компонента, спектральному анализу для получения спектра расстояния, рассчитывает интенсивность этого спектра расстояния, и рассчитывает расстояние до объекта 6 измерения, на основе интенсивности пика спектра расстояния. В качестве способа анализа спектра спектр анализируют с использованием непараметрической методики, представленной преобразованием Фурье, или параметрической методики, такой как AR моделирование, или другой соответствующей методики анализа спектра.
(Принцип 1 измерения)
Принцип измерения будет описан со ссылкой на фиг.1 и 2 для устройства измерения расстояния и способа измерения расстояния, которые относятся к заявленному изобретению, следующим образом.
Когда бегущая волна, выводимая из источника 1 сигнала, имеет частотный компонент с полосой частот от f0·fw/2 до f0+fw/2, и интенсивность каждого частотного компонента представляет собой А(f), и фаза представлена как θ(f), бегущая волна VT в момент t прошедшего времени и в положении x от начала измерения может быть выражена следующим Уравнением (1):
где f обозначает частоту, и c обозначает скорость света, и любая точка на оси x представляет собой x=0.
Путь dk обозначает расстояние до k-ого измеряемого объекта 6; vk скорость света и yk и φk представляют размер и фазу коэффициента отражения, соответственно; тогда отраженная волна VRk от объекта 6 измерения может быть выражена следующим Уравнением (2), где, k=1, 2...:

В таком случае сигнал Vc смешанной волны, наблюдаемой в модуле 3 детектирования смешанной волны, расположенный в положении x=xs, выражается следующим Ур. (3):
Смешанная волна VC, детектируемая модулем 3 детектирования смешанной волны, разлагается на каждый частотный компонент с использованием полосового фильтра. Или, как показано на фиг. 2, смешанная волна Vc преобразуется в цифровой сигнал, с использованием АЦ преобразователя (S100), и этот цифровой сигнал разлагают на каждый частотный компонент с помощью анализа частотного компонента, такого как преобразование Фурье (S101).
Разложенный компонент VC(f, t, xs) частоты f представляет собой интегрируемую функцию (уравнение, которое должно быть интегрировано) в Ур. (3) и выражается следующим Ур. (4):

Амплитуда разложенного частотного компонента f может быть выражена следующим Ур. (5).

где, реально можно предположить, что интенсивность отраженной волны является чрезвычайно малой, и поэтому ее можно аппроксимировать как Yk<<1.
Теперь, если сделать t достаточно малым, можно рассматривать vkt≡0, (как в случае моделирования, описанном ниже, даже когда время наблюдения t=3,5 [мкс] и скорость vk=300 [км/ч], vkt≡0,29 [мм], и можно принять vkt≡0), и амплитуда разложенного частотного компонента f может быть аппроксимирована, например, как в следующем Ур. (6):

Теперь А(f) обозначает частотную характеристику источника 1 сигнала, и ее можно легко узнать, и поэтому, ее можно считать известной. В случае, когда А(f) можно рассматривать как константу A, получим

Или в случае, когда А(f) не является константой (например, в случае, когда используется источник шумов), нормализация Ур. (6) по А(f) позволяет получить

Значение константы А в упомянутом выше Ур. (7) не содержит информацию о расстоянии. Поэтому, если A=1, Ур.(7) становится таким же, как Ур.(8), и Ур.(8) используется ниже как уравнение, которое выражает амплитуду.
Мы определили, что Ур. (8) представляет собой периодическую функцию, которая имеет период c/2(dk·xs) для частоты f. Следовательно, если его подвергают спектральному анализу с использованием непараметрической технологии, представленной, например, преобразованием Фурье, или параметрической технологии, такой как AR моделирование, и т.д., может быть получено расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта измерения.
Пример расчета расстояния с использованием преобразования Фурье представлен следующим образом.
В формуле преобразования Фурье
произведены замены ω/2τ → 2x/c, t → f, и f(t) → а(f, xs). В результате может быть найден спектр R(x) расстояния следующим образом (S103 (см. фиг. 2)).
где, Sa (z)=sin (z)/z.
В соответствии с Ур. (10), интенсивность R(x) (интенсивность спектра расстояния) |R(x)| принимает значение пика при x=0,±(dk·xs). В действительности, предел к x>0, поскольку расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта 6 измерения является положительным; тогда значение x, когда |R(x)| принимает значение пика, представляет собой расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта 6 измерения. Таким образом, при определении значения x, в котором значение |R(x)| становятся пиком, можно определить положение от модуля 3 детектирования смешанной волны до объекта 6 измерения (S104 (см. фиг. 2)).
Как описано выше, в устройстве измерения расстояния и в способе измерения расстояния, в соответствии с заявленным изобретением, детектируют смешанную волну, состоящую из бегущей волны и отраженной волны, отраженной от объекта измерения, поэтому нет необходимости разделять бегущую волну и отраженную волну, и может быть получена простая конструкция, и может быть построено измерительное устройство для измерений на малых расстояниях и с малыми затратами.
Кроме того, при определении спектра расстояния по смешанной волне, состоящей из бегущей волны, имеющей множество разных частотных компонентов, и ее отраженной волны, можно определить расстояние между объектом измерения и модулем детектирования смешанной волны по расстоянию, на котором интенсивность спектра расстояния принимает значение пика.
Когда расстояние до объекта измерения измеряют путем использования стоячей волны, в принципе, невозможно сделать время наблюдения короче, чем время, в течение которого формируется стоячая волна, после переключения частоты бегущей волны, при этом на пик спектра расстояния воздействует эффект Доплера, и генерируется ошибка измерения, но в заявленном изобретении, в принципе, отсутствует концепция переключения частоты, и время наблюдения может быть сокращено до такого уровня, на котором эффект Доплера фактически можно игнорировать, и расстояние может быть точно измерено.
(Моделирование l)
Далее, на основе описанного выше принципа 1 измерения, проведено моделирование с устройством измерения расстояния, показанным на фиг. 2.
Устройство измерения расстояния, показанное на фиг. 2, имеет источник 1 сигнала, который постоянно выводит сигнал, включающий в себя компоненты 24,000 ГГц - 24,075 ГГц, и модуль 2 передачи, который передает бегущую волну VT, постоянно включающую в себя компоненты в определенной полосе частот, к объектам 6,… 6 измерения. И устройство измерения расстояния имеет модуль 3 детектирования смешанной волны, который детектирует смешанную волну VC(t, 0), состоящую из отраженной волны VRk, отраженный k-м объектом 6 измерения, и бегущей волны VT. Таким образом, модуль 3 детектирования смешанной волны расположен в точке xs = 0. Детектируемую смешанную волну VC преобразуют с понижением частоты в диапазон от 0 до 75 МГц, с использованием преобразователя 8 с понижением частоты. VC после преобразования с понижением частоты преобразуют в цифровой сигнал с использованием АЦ преобразователя (S100), и VC(f, t, 0), преобразованную в цифровой сигнал, подвергают преобразованию Фурье для разложения ее на каждый частотный компонент (S101). Для определения амплитуды каждого частотного компонента рассчитывают абсолютное значение смешанной волны Vc(f, t, 0), разложенной на частотные компоненты (S102), и затем определяют нормализованную амплитуду а(f, 0). Эту нормализованную амплитуду а(f, 0) подвергают спектральному анализу для определения спектра R(x) расстояния (S103), и по пику амплитуды (интенсивности) спектра R(x) расстояния, рассчитывают положение объекта 6 измерения (S104). При этом пусть направление, в котором объект 6 измерения удаляется от устройства измерения расстояния, будет положительным, и направление, в котором объект измерения приближается к устройству измерения расстояния, будет отрицательным.
При моделировании устройства измерения расстояния, показанного на фиг. 2, смешанную волну, состоящую из бегущей волны и отраженной волны, наблюдали для 3,5 мкс (t=3,5 [мкс]).
При моделировании сигнал, однородно включающий в себя компоненты от 24,000 ГГц до 24,075 ГГц, выводимый из источника сигнала, обозначен как бегущая волна, и смешанную волну VC(t, 0) рассчитывали в соответствии с Ур. (3). Затем умножали смешанную волну VC на комплексную синусоидальную волну с частотой 24 ГГц и получали преобразованное с понижением частоты значение VC. Таким образом, смешанную волну VC преобразовали с понижением частоты до диапазона от 0 до 75 МГц.
Затем преобразованную с понижением частоту VC подвергали преобразованию Фурье для определения Ур. (8) а((f, 0)) по абсолютной величине, и а(f, 0) подвергали преобразованию Фурье в соответствии с Ур. (10), для получения спектра R(x) расстояния и размера спектра (|R(x)|) расстояния.
(Моделирование 1-1)
На фиг 3. показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения остается неподвижным на расстоянии 10 м от модуля 3 детектирования смешанной волны и для скорости 0 км/ч. На фиг. 3(a) показана форма колебаний в зависимости от времени смешанной волны после преобразования с понижением частоты (бегущая волна + отраженная волна) и представлен график, который показывает мгновенное значение в каждый момент времени периода измерения (график VС(t, 0) после преобразования с понижением частоты). На фиг. 3(b) показан график а(f, 0), представленный в Ур. (8), и показана нормализованная амплитуда каждого частотного компонента. На фиг. 3(c) показан график, который представляет взаимозависимость между расстоянием и интенсивностью спектра |R(x)| расстояния при обработке а(f, 0), полученной по фиг. 3(b) с использованием спектрального анализа. Как можно видеть на фиг. 3(c), интенсивность спектра расстояния имеет большое значение пика на расстоянии 10 метров. На основе этого, в неподвижном состоянии, можно правильно измерить расстояние.
(Моделирование 1-2)
На фиг. 4 показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения движется на расстоянии 10 м от модуля 3 детектирования смешанной волны со скоростью +300 км/ч. На фиг. 4(a) показана форма колебаний в зависимости от времени смешанной волны после преобразования с понижением частоты (бегущая волна + отраженная волна), и показан график, который представляет мгновенное значение в каждый момент времени периода измерения (график VC(t, 0) после преобразования с понижением частоты). На фиг. 4(b) показан график а(f, 0), представленный Ур. (8), и обозначена нормализованная амплитуда каждого частотного компонента. На фиг. 4(c) показан график, который представляет взаимозависимость между расстоянием и интенсивностью спектра |R(x)| расстояния, после обработки а(f, 0), определенной на фиг. 4(b) с использованием спектрального анализа. Как можно видеть на фиг. 4(c), интенсивность спектра расстояния имеет большое значение пика на расстоянии 10 м. На основе этого, даже когда объект измерения движется со скоростью +300 км/ч, можно правильно измерять расстояние, как и случае моделирования 1-1.
(Моделирование 1-3)
На фиг. 5 показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения движется на расстоянии 40 м от модуля 3 детектирования смешанной волны и со скоростью -50 км/ч. На фиг. 5(a) показана форма колебаний в зависимости от времени смешанной волны после преобразования с понижением частоты (бегущая волна + отраженная волна), и показан график, который представляет мгновенное значение в каждый момент времени периода измерения (график VC(t, 0) после преобразования с понижением частоты). На фиг. 5(b) показан график а(f, 0), представленный Ур. (8), и обозначена нормализованная амплитуда каждого частотного компонента. На фиг. 5(c) показан график, представляющий взаимосвязь между расстоянием и интенсивностью спектра |R(x)| расстояния, путем обработки а(f, 0), полученной на фиг. 5(b), с использованием спектрального анализа. Как можно ясно видеть на фиг. 5(c), интенсивность спектра расстояния имеет большое значение пика на расстоянии 40 м. На этом основании, даже когда расстояние, скорость движения и направление движения до объекта измерения изменяются, можно правильно измерять расстояние.
(Моделирование 1-4)
На фиг. 6 показаны графики, которые моделируют измерение расстояния, когда имеется два объекта 6 измерения, и один объект 6 измерения движется на расстоянии 5 м от модуля 3 детектирования смешанной волны и со скоростью +100 км/ч, в то время как другой объект 6 измерения движется на расстоянии 12,5 м от модуля 3 детектирования смешанной волны и со скоростью -300 км/ч. На фиг. 6(a) показана форма колебаний в зависимости от времени смешанной волны после преобразования с понижением частоты (бегущая волна + отраженная волна), и представлен график, на котором показано мгновенное значение в каждый момент времени периода измерения (график VC(t, 0) после преобразования с понижением частоты). На фиг. 6(b) показан график а(f, 0), представленный Ур. (8) и обозначена нормализованная амплитуда каждого частотного компонента. На фиг. 6(c) показан график, который представляет взаимосвязь между расстоянием и интенсивностью спектра |R(x)| расстояния, путем обработки а(f, 0), определенной по фиг. 6(b), с использованием спектрального анализа. Как можно видеть на фиг. 6(c), интенсивность спектра расстояния имеет большие значения пика на расстояниях 5 м и 12,5 м. На основе этого, даже когда имеется множество объектов измерения, можно правильно измерить расстояния. Даже когда объект измерения движется на коротком расстоянии 10 м или меньше, можно также правильно измерить расстояние. Кроме того, даже в случае, когда расстояние до множества объектов измерения уменьшается и разность скоростей велика, что трудно измерить с использованием устройства измерения расстояния, в котором используется стоячая волна, можно правильно измерить положение каждого объекта измерения.
Как можно из приведенного выше моделирования 1-1 - 1-4, расстояние до объекта измерения можно измерять независимо от скорости объекта измерения. Кроме того, даже когда расстояние до множества объектов измерения становятся малым, и разность скоростей велика, можно правильно измерить положение каждого объекта измерения.
В приведенном выше описании смешанную волну детектируют с использованием одного модуля 3 детектирования смешанной волны, но как показано на фиг. 7, множество модулей 3,…, 3 детектирования смешанной волны, могут быть расположены в разных положениях xs1, … xsN, которые отличаются друг от друга. Смешанные волны VC, детектируемые множеством модулей 3,…, 3 детектирования смешанной волны, таким образом, подвергают АЦ преобразованию с помощью АЦ преобразователя для каждого модуля 3 детектирования смешанной волны (S110), сигналы смешанных волн, преобразованных в цифровые сигналы, подвергают преобразованию Фурье (S111), и абсолютное значение рассчитывают для получения амплитуды а(f, xsi) (i обозначает 1, 2,..., N,...) для каждого модуля 3 детектирования смешанной волны. При определении разности между любыми двумя амплитудами (например, а(f, xs1) и а(f, xs2)), устраняется необязательный компонент постоянного тока (первый элемент Ур. (8)), (S113), и каждую амплитуду а(f, xsi) с необязательным удаленным компонентом постоянного тока повергают спектральному анализу для получения спектра расстояния (S114), и после усреднения каждого спектра расстояния (S115), расстояние до объекта 6 измерения рассчитывают на основе пика размера спектра расстояния (S116). Это может быть получено путем предоставления, например, средства устранения компонента постоянного тока, которое определяет разность любых двух амплитуд и удаляет ненужный компонент постоянного тока, и средства усреднения спектра расстояния, которое рассчитывает среднее значение множества спектров расстояния для модуля 5 расчета расстояния.
Следовательно, в случае, когда множество модулей 3 детектирования смешанной волны установлены так, что образуется сигнальный процессор, как показано на фиг. 7, необязательные компоненты постоянного тока могут быть удалены. Кроме того, спектры расстояния, полученные для каждой амплитуды а(f, xsi), усредняют, снижают компоненты шумов, и при этом можно более точно измерить расстояние.
Второй вариант воплощения
Структура второго варианта воплощения устройства измерения расстояния и способа измерения расстояния, относящихся к заявленному изобретению, будут описаны ниже.
(Техническое решение 2)
На фиг. 8 показана иллюстрация, которая поясняет структуру устройства измерения расстояния, относящегося к заявленному изобретению. Устройство измерения расстояния, относящееся к заявленному изобретению, передает сигнал, выводимый из источника 9 сигнала в виде волнового колебания, из модуля 2 передачи к объекту 6 измерения, детектирует смешанную волну Vc, состоящую из отраженной волны VRk, отраженной k-м объектом 6 измерения, и бегущей волны VT в модуле 3 детектирования смешанной волны, детектирует компонент а(t, xs) амплитуды смешанной волны в модуле 10 детектирования амплитудного компонента, рассчитывает спектр R(x) расстояния в модуле 11 расчета расстояния, и измеряет расстояние до объекта 6 измерения.
Источник 9 сигнала выводит частотно-модулированный сигнал, полученный путем частотной модуляции несущей волны с определенной частотой произвольным периодическим сигналом, и постоянно выводит сигнал, имеющий два или больше частотного компонента. В качестве конкретного примера, как показано на фиг. 9, источник 9 сигнала выполнен с использованием источника 9a сигнала несущей волны, который передает сигнал несущей волны с определенной частотой, и источника 9b модулирующего сигнала, который модулирует сигнал несущей волны произвольным периодическим сигналом, и из этого источника 9 сигнала выводят частотно-модулированный сигнал. В качестве другого конкретного примера, источник 9 сигнала может быть выполнен с использованием средства генерирования частотно-модулированного сигнала (не показано), оборудованного микропроцессором, и средством сохранения частотно-модулированного сигнала (не показано), в котором сохраняют данные для вывода частотно-модулированного сигнала с мгновенной частотой f0+fD·m(t), и данные, сохраненные в средстве сохранения частотно-модулированного сигнала, считывают с помощью средства генерирования частотно-модулированного сигнала, и при этом может быть сгенерирован частотно-модулированный сигнал.
Модуль 2 передачи представляет собой двунаправленный элемент, такой как антенна (или электрод), и т.д., который передает сигнал, выводимый из источника 9 сигнала, в виде волнового колебания. В случае, когда модуль 3 детектирования смешанной волны расположен между источником 9 сигнала и модулем 2 передачи, модуль 2 передачи может выполнять роль приема отраженной волны. Модуль 2 передачи выводит волновое колебание с частотным компонентом, выводимым из источника 9 сигнала и выведенное волновое колебание передают к объекту 6 измерения.
Таким образом, бегущая волна Vt в заявленном изобретении обозначает волновое колебание, передаваемое из модуля 2 передачи, и сигнал, выводимый из источника 9 сигнала.
Следовательно, в случае, когда смешанная волна, состоящая из сигнала источника 9 сигнала и сигнала отраженной волны, возвращенная через модуль 2 передачи, детектируется модулем 3 детектирования смешанной волны, сигнал от источника 9 сигнала становится бегущей волной VT.
Модуль 3 детектирования смешанной волны детектирует смешанную волну VC бегущей волны VT и отраженной волны VRk. Этот модуль 3 детектирования смешанной волны может быть выполнен путем установки ненаправленного соединителя для детектирования смешанной волны VC, состоящей из бегущей волны VT, выводимой из источника 9 сигнала, и отраженной волны VRk, возвращенной через модуль 2 передачи, подключенный к середине фидера питания, который соединяет источник 9 сигнала с модулем 2 передачи. Кроме того, приемная антенна (или электрод) для детектирования смешанной волны VC, состоящей из бегущей волны VT и отраженной волны VRk установлена в пространстве между модулем 2 передачи и объектом 6 измерения, и обозначена как модуль 3 детектирования смешанной волны.
Модуль 10 детектирования амплитудного компонента детектирует амплитудный компонент смешанной волны VC, детектируемой модулем 3 детектирования смешанной волны, и в его состав входит детектор огибающей, квадратичный детектор, детектор синхронизации, квадратурный детектор и т.п.
Модуль 11 расчета расстояния подвергает амплитудный компонент, детектируемый модулем 10 детектирования амплитудного компонента, спектральному анализу для получения спектра расстояния, рассчитывает интенсивность этого спектра расстояния, и рассчитывает расстояние до объекта 6 измерения на основе пика интенсивности спектра расстояния. В качестве способа спектрального анализа спектр анализируют, используя непараметрическую методику, представленную преобразованием Фурье, или параметрическую методику, такую как AR моделирование, и т.д., или другую соответствующую методику спектрального анализа.
(Принцип 2 измерения)
Рассмотрим фиг.8 и 9, со ссылкой на которые будет описан принцип измерения устройства измерения расстояния, и способ измерения расстояния, связанный с заявленным изобретением, следующим образом.
Когда в состав источника 9 сигнала входит источник 9a сигнала несущей волны с частотой f0, и источник 9b сигнала модуляции, который модулирует несущую волну данного источника 9a сигнала несущей волны, бегущая волна VT с прошедшим временем t от начала измерения и в положении x становится частотно-модулированной незатухающей волной, что выражается следующим Ур (11):

где t обозначает время, прошедшее от начала измерения, и m(t) представляет собой модулированный сигнал, который представляет собой произвольную периодическую функцию с амплитудой, равной 1. Пусть fD обозначает максимальный сдвиг частоты при частотной модуляции, и f0 обозначает центральную частоту. Следовательно, мгновенная частота бегущей волны VT(t, x) равна f0+fD·m(t). Кроме того, c обозначает скорость света, и θ обозначает фазу, и любая точка на оси x представляет собой x=0.
Пусть dk обозначает расстояние до k-ого объекта 6 измерения, vk скорость, и yk и φk обозначают размер и фазу коэффициента отражения, соответственно; тогда отраженная волна от объекта 6 измерения может быть выражена следующим Ур. (12), где k=1, 2,

В таком случае, сигнал VC смешанной волны, наблюдаемый в модуле 3 детектирования смешанной волны, расположенный в положении x=xs, выражается следующим Ур. (13):
И амплитуда VC выражается следующим Ур. (14).

На практике можно предположить, что размер отраженной волны чрезвычайно мал yk<<1, и коэффициент второй степени yk и выше можно проигнорировать, поскольку они приблизительно равны нулю. Следовательно, его можно аппроксимировать, как следующее Ур.(15)

Теперь, если сделать t достаточно малым, можно считать, что vkt≡0 (как в описанном ниже случае моделирования, даже когда время наблюдения t=20 [мкс] и скорость vkt=300 [км/ч], vkt≡0,1.7 [мм], и можно считать, что vkt≡0), амплитуда VC может быть аппроксимирована, как в следующем Ур. (16) и влияние скорости vk можно исключить:

Кроме того, при аппроксимации, в как в следующем Ур. (17)
Ур. (16) становится следующим Ур. (18).

где А=1, поскольку константа A не содержит информацию в заявленном изобретении.
Затем, было определено, что Ур. (18) представляет собой периодическую функцию, которая имеет период c/2(dk·xs) для мгновенной частоты f0+fD·m(t). Следовательно, если его подвергнуть спектральному анализу с использованием непараметрической методики, представленной, например, преобразованием Фурье или параметрической методики, такой как AR моделирование и т.д., может быть получено расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта 6 измерения 6.
Пример расчета расстояния с помощью преобразования Фурье представлен ниже.
В формуле (9) преобразования Фурье выполнена замена f (t) → а(f, xs), ω/2τ → 2x/c, и t → мгновенная частота f0+fD·m(t). Поскольку df=fDdm(t) спектр R(x) расстояния может быть определен в соответствии со следующим Ур. (19).
где, Sa (z)=sin(z)/z.
В соответствии с Ур. (19), размер R(x) (интенсивность спектра расстояния) |R(x)| принимает значение пика в точке x=0,±(dk·xs). На практике предел x>0, поскольку расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта 6 измерения является положительным; тогда значение x, в котором |R(x)| принимает значение пика, представляет собой расстояние dk·xs от модуля 3 детектирования смешанной волны до объекта 6 измерения.
Как описано выше, в устройстве измерения расстояния и в способе измерения расстояния, связанными с заявленным изобретением, детектируется смешанная волна, состоящая из бегущей волны и отраженной волны, отраженной от объекта измерения, поэтому нет необходимости разделять бегущую волну и отраженную волну, и может быть получена простая конструкция, и может быть построено устройство измерения расстояния с малой стоимостью и малыми размерами.
Кроме того, при определении спектра расстояния по смешанной волне, состоящей из бегущей волны, имеющей множество разных частотных компонентов, и ее отраженной волны, можно определять расстояние между объектом измерения и модулем детектирования смешанной волны по расстоянию, на котором интенсивность спектра расстояния принимает значение пика.
Когда расстояние до объекта измерения измеряют путем использования стоячей волны, в принципе, невозможно сделать время наблюдения короче, чем время, в течение которого формируется стоячая волна после переключения частоты бегущей волны, при этом на пик спектра расстояния воздействует эффект Доплера, и генерируется ошибка измерения, но в заявленном изобретении, в принципе, отсутствует концепция переключения частоты, и время наблюдения можно сократить до такого уровня, на котором эффект Доплера фактически можно игнорировать, и можно точно измерять расстояние.
(Моделирование 2)
Далее, на основе предыдущего принципа 2 измерения, осуществляется моделирование с устройством измерения расстояния, показанным на фиг. 9.
Источник 9 сигнала устройства измерения расстояния, показанного на фиг. 9, имеет источник 9a сигнала несущей волны, который выводит сигнал несущей волны с частотой f0=24,0375 ГГц и источник 9b модулирующего сигнала, модулирующий сигнал m(t) которого представляет собой синусоидальное колебание с частотой 50 кГц и с максимальным сдвигом частоты fD=37,5 МГц, и выводит сигнал с мгновенной частотой f0+fD·m(t). Бегущую волну VT, выраженную Ур. (11), передают из модуля 2 передачи. Смешанная волна VС(t, 0), состоящая из отраженной волны VRk, отраженный от k-ого объекта 6 измерения, и бегущей волны VT, детектируют с помощью модуля 3 детектирования смешанной волны. Смешанную волну Vc наблюдают в течение 1 периода модулированного сигнала m(t). Следовательно, t=1/50 [кГц] = 20 [мкс]. Таким образом, модуль 3 детектирования смешанной волны расположен в точке xs=0. Кроме того, пусть направление, в котором объект 6 измерения удаляется от устройства измерения расстояния, будет положительным, и направление, в котором объект приближается к устройству измерения расстояния, будет отрицательным.
Детектируемую смешанную волну VС подвергают детектированию огибающей, с использованием детектора огибающей, и детектируют компонент а(t, 0) амплитуды смешанной волны (S120). Когда детектируют компонент а(t, 0) амплитуды смешанной волны, его преобразуют в цифровой сигнал с помощью АЦ преобразователя (S121). Преобразованную в цифровую форму амплитуду а(t, 0) подвергают спектральному анализу, и определяют спектр R(x) расстояния (S122). От пика найденной интенсивности спектра расстояния рассчитывают положение объекта 6 измерения (S123).
(Моделирование 2-1)
На фиг. 10 показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения остается неподвижным на расстоянии 10 м от модуля 3 детектирования смешанной волны и имеет скорость 0 км/ч. На фиг. 10(a) показан график, на котором представлена амплитуда а(t, 0) модулирующего сигнала m(t) и смешанной волны. На фиг. 10(b) показана интенсивность спектра расстояния, после выполнения спектрального анализа на этой основе. Как можно видеть на фиг. 10(b), интенсивность спектра расстояния имеет большое значение пика на расстоянии 10 м. На основе этого, в стационарном состоянии, можно правильно измерять расстояние на коротком расстоянии, составляющем десятки метров или меньше.
(Моделирование 2-2)
На фиг. 11 показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения движется на расстоянии 10 м от модуля 3 детектирования смешанной волны со скоростью +300 км/ч. На фиг. 11(a) показан график, на котором представлена амплитуда а(t, 0) модулирующего сигнала m(t) и смешанной волны. На фиг. 11(b) показана интенсивность спектра расстояния после выполнения спектрального анализа на этой основе. Как можно видеть на фиг. 11(b), интенсивность спектра расстояния имеет большое значение пика на расстоянии 10 м. Основываясь на этом, даже когда объект измерения движется со скоростью +300 км/ч, можно правильно измерять расстояние, как в случае моделирования 2-1.
(Моделирование 2-3)
На фиг. 12 показаны графики, которые моделируют измерение расстояния, когда объект 6 измерения движется на расстоянии 40 м от модуля 3 детектирования смешанной волны и со скоростью -50 км/ч. На фиг. 12(a) показан график, на котором представлена амплитуда а(t, 0) модулированного сигнала m(t) и смешанной волны. На фиг. 12B показана интенсивность спектра расстояния после выполнения спектрального анализа на этой основе. Как можно видеть на фиг. 12(b), интенсивность спектра расстояния имеет большое значение пика на расстоянии 40 м. На этой основе, даже когда расстояние, скорость перемещения, и направление перемещения объекта измерения меняются, можно правильно измерять расстояние.
(Моделирование 2-4)
На фиг. 13 показаны графики, которые моделируют измерение расстояния, когда имеется два объекта 6 и 6 измерения, и один объект 6 измерения движется на расстоянии 5 м от модуля 3 детектирования смешанной волны и имеет скорость +100 км/ч, в то время как другой объект 6 измерения движется на расстоянии 12,5 м от модуля 3 детектирования смешанной волны и имеет скорость -300 км/ч. На фиг. 13(a) показан график, на котором показана амплитуда а(t, 0) модулирующего сигнала m(t) и смешанной волны. На фиг. 13B показана интенсивность спектра расстояния после выполнения спектрального анализа на этой основе. Как можно видеть на фиг. 13(b), интенсивность спектра расстояния имеет большие значения пика на расстояниях 5 м и 12,5 м. На основе этого, даже когда имеется множество объектов измерения, можно правильное измерять расстояние. Кроме того, даже на коротком расстоянии 10 м или меньше, можно правильно измерять расстояние. Кроме того, даже в случае, когда расстояние до множества объектов измерения становится малым и разность скоростей велика, можно правильно измерять положение каждого объекта измерения.
Как можно видеть из предыдущих примеров моделирования 2-1 - 2-4, независимо от скорости объекта измерения, можно измерять расстояние до объекта измерения. Кроме того, даже в случае, когда расстояние до множества объектов измерения уменьшается и разность скоростей велика, что трудно измерять с использованием устройством измерения расстояния, в котором применяется стоячая волна, положение каждого объекта измерения можно правильно измерять.
В приведенном выше описании смешанную волну детектируют с помощью одного модуля 3 детектирования смешанной волны, но как показано на фиг. 14, множество модулей 3,…, 3 детектирования смешанной волны могут быть расположены в разных положениях xs1,…, xsN, которые отличаются друг от друга. Множество детекторов 3,...,3 детектирующих смешанную волну VC, таким образом, детектируют амплитудный компонент (амплитуда а(t, xsi) (i обозначает 1, 2, N...)) смешанной волны путем детектирования огибающей с помощью детектора огибающей каждой смешанной волны Vc, детектируемой каждым модулем 3 детектирования смешанной волны (S130), при этом каждую детектируемую амплитуду а(t, xsi) подвергают АЦ преобразованию с помощью АЦ преобразователя (S131), и путем удаления разности между любыми двумя амплитудами (например, а(t, xs1) и а(t, xs2), используя амплитуды, преобразованные в цифровые сигналы, удаляют ненужные компоненты постоянного тока (первый член Ур. (18)), (S132), и каждую амплитуду а(t, xsi) без ненужного компонента постоянного тока подвергают спектральному анализу, для получения спектра (S133) расстояния, и после усреднения каждого спектра (S134) расстояния рассчитывают расстояние до объекта измерения на основе пика интенсивности спектра расстояния (S135). Это может быть получено с помощью, например, средства удаления компонента постоянного тока, которое определяет разность любых двух амплитуд и устраняет ненужный компонент постоянного тока, и средства усреднения спектра расстояния, которое рассчитывает среднее значение для множества спектров расстояния для модуля 5 расчета расстояния. Таким образом, компонент постоянного тока может быть удален с помощью аналоговой схемы (дифференциального усилителя и т.д.), и после этого сигнал может быть подвергнут АЦ преобразованию.
Следовательно, в случае, когда множество модулей 3 детектирования смешанной волны установлены так, что они составляют процессор сигналов, как показано на фиг. 14, ненужные компоненты постоянного тока могут быть удалены. Кроме того, усредняют спектр расстояния, полученный от каждой амплитуды а(t, xsi), уменьшают компоненты шумов, и можно более точно измерить расстояние.
Третий вариант воплощения
Техническое решение третьего варианта воплощения устройства измерения расстояния и способа измерения расстояния, относящихся к заявленному изобретению, будет описано ниже.
(Техническое решение 3)
На фиг. 15 представлена иллюстрация, которая поясняет структуру устройства измерения расстояния, относящегося к заявленному изобретению. Устройство измерения расстояния, относящееся к заявленному изобретению, передает сигнал, выводимый из источника 13 сигнала, в виде волнового колебания из модуля 2 передачи к объекту 6 измерения, детектирует смешанную волну VC, состоящую из отраженной волны VRk, отраженной k-ым объектом 6 измерения, и бегущей волны VT, в модуле 3 детектирования смешанной волны, обрабатывает эту смешанную волну VC с использованием сигнального процессора 14, и определяет расстояние до объекта 6 измерения. Сигнальный процессор 14 содержит модуль 15 детектирования амплитудного компонента, модуль 16 детектирования одиночной частоты, модуль 17 детектирования уровня сигнала и модуль 18 расчета расстояния, и компонент (а(t, xs)) амплитуды смешанной волны детектируют с использованием модуля 15 детектирования амплитудного компонента, сигнал (R(x(t)) компонента только на определенной частоте fB выбирают с помощью модуля 16 выбора одиночной частоты, уровень (|R(x(t))|) выбранного сигнала детектируют с помощью модуля 17 детектирования уровня сигнала, и по этому уровню сигнала измеряют расстояние до объекта 6 измерения с помощью модуля 18 расчета расстояния.
Источник 13 сигнала выводит сигнал, представляющий собой несущую волну с определенной частотой, с двойной частотной модуляцией (дважды модулированный сигнал), с использованием второго модулирующего сигнала, заранее модулированного первым модулирующим сигналом, и выводит сигнал, всегда содержащий два или больше частотного компонента.
Для конкретного примера, показанного на фиг. 15, источник 13 сигнала содержит источник 13a сигнала несущей волны, источник 13b второго модулирующего сигнала и источник 13c первого модулирующего сигнала. Источник 13c первого модулирующего сигнала выводит первый модулирующий сигнал x(t) с определенным первым периодом. Источник 13b второго модулирующего сигнала выводит второй модулирующий сигнал m(t), и второй модулирующий сигнал m(t) представляет собой периодический сигнал с определенным вторым периодом, генерируемый источником 13b второго модулирующего сигнала, который подвергают частотной модуляции с использованием первого модулирующего сигнала x(t). Источник 13a сигнала несущей волны выводит сигнал с двойной модуляцией с мгновенной частотой f0+fD·m(t) и выполняет частотную модуляцию несущей волны, генерируемой источником 13a сигнала несущей волны, вторым модулирующим сигналом m(t).
Таким образом, сигнал с двойной модуляцией, выводимый из источника 13 сигнала в соответствии с заявленным изобретением, представляет собой сигнал несущей волны, частотно-модулированный вторым модулирующим сигналом m(t), и второй модулирующий сигнал m(t) является частотно-модулированным первым модулирующим сигналом x(t). Следовательно, сигнал с двойной модуляцией в заявленном изобретении не является ни сигналом, дополнительно частотно-модулированным первым модулирующим сигналом x(t), после частотной модуляции сигнала несущей волны вторым модулирующим сигналом m(t), ни сигналом, дополнительно частотно-модулированным вторым модулирующим сигналом m(t), после частотной модуляции сигнала несущей волны первым модулирующим сигналом x(t).
Кроме того, в качестве другого конкретного примера источника 13 сигнала, как показано на фиг. 16(a), источник 13 сигнала содержит источник 13a сигнала несущей волны (средство генерирования несущей волны), средство 13d генерирования второго модулирующего сигнала и средство 13e сохранения второго модулирующего сигнала. Средство 13e сохранения второго модулирующего сигнала сохраняет данные вывода второго модулирующего сигнала m(t), и средство 13d генерирования второго модулирующего сигнала считывает данные, сохраненные в средстве 13e сохранения второго модулирующего сигнала, и выводит второй модулирующий сигнал m(t). Источник 13a сигнала несущей волны генерирует несущую волну с определенной частотой, выполняет частотную модуляцию этой несущей волны вторым модулирующим сигналом m(t) и выводит сигнал с двойной модуляцией с мгновенной частотой f0+fD·m(t).
Средство 13d генерирования второго модулирующего сигнала выполнено на основе микропроцессора и других элементов, но оно только генерирует второй модулирующий сигнал в соответствии с заранее сохраненными данными; поэтому можно использовать процессор с малыми функциональными возможностями по сравнению с микропроцессором, используемым для анализа Фурье (частотного анализа) в принципах 1 и 2 измерения, и обеспечивается малая стоимость.
Кроме того, как показано на фиг. 16(b), источник 13 сигнала может содержать средство генерирования сигнала с двойной модуляцией, оснащенное микропроцессором, и средство 13g сохранения сигнала с двойной модуляцией, в котором сохраняются данные для вывода сигнала с двойной модуляцией с мгновенной частотой f0+fD·m(t), и данные, сохраненные в средстве 13g сохранения сигнала с двойной модуляцией, считываются средством 13f генерирования сигнала с двойной модуляцией для генерирования сигнала с двойной модуляцией.
Средство 13f генерирования сигнала с двойной модуляцией также оснащено микропроцессором, но при этом можно использовать процессор с меньшими функциональными возможностями по сравнению с микропроцессором, используемым для анализа Фурье (частотного анализа), и обеспечивается снижение стоимости.
Модуль 2 передачи представляет собой двунаправленный элемент, такой как антенна (или электрод), предназначенный для передачи сигнала, выводимого из источника 13 сигнала в виде волнового колебания. В случае, когда модуль 3 детектирования смешанной волны расположен между источником 13 сигнала и модулем 2 передачи, модуль 2 передачи может выполнять роль приема отраженной волны. Модуль 2 передачи выводит волновое колебание, содержащее частотные компоненты, выводимые из источника 13 сигнала, и выводимое волновое колебание передают к объекту 6 измерения.
Таким образом, бегущая волна VT в заявленном изобретении означает волновое колебание, передаваемое из модуля 2 передачи, и сигнал, выводимый из источника 13 сигнала.
Следовательно, в случае, когда смешанная волна сигнала из источника 13 сигнала и сигнал отраженной волны, возвращаемый через модуль 2 передачи, детектируют с помощью модуля 3 детектирования смешанной волны, сигнал от источника 13 сигнала представляет собой бегущую волну VT.
Модуль 3 детектирования смешанной волны детектирует смешанную волну VC, состоящую из бегущей волны VT и отраженной волны VRk. Этот модуль 3 детектирования смешанной волны может быть выполнен в виде ненаправленного соединителя, предназначенного для детектирования смешанной волны VC, состоящей из бегущей волны VT, выводимой источником 13 сигнала, и отраженной волны VRk, возвращенной через модуль 2 передачи, подключенный посередине фидера питания, который соединяет источник 13 сигнала с модулем 2 передачи. Кроме того, приемная антенна (или электрод), предназначенная для детектирования смешанной волны Vc, состоящей из бегущей волны VT и отраженной волны VRk, установлена в пространстве между модулем 2 передачи и объектом 6 измерения, и может использоваться для модуля 3 детектирования смешанной волны.
Модуль 15 детектирования амплитудного компонента детектирует амплитудный компонент смешанной волны VC, детектируемой модулем 3 детектирования смешанной волны, и в его состав входит один из детектора огибающей, квадратичного детектора, синхронного детектора, квадратурного детектора и др.
Модуль 16 выбора одиночной частоты выбирает один частотный компонент из амплитудных компонентов смешанной волны VC, детектируемой модулем 15 детектирования амплитудного компонента, и содержит любой из квадратурного детектора, полосового фильтра, согласованного фильтра и других устройств.
Модуль 17 детектирования уровня сигнала детектирует уровень сигнала, полученный модулем 16 выбора одиночной частоты, и содержит один из детектора огибающей, квадратичного детектора и других устройств. Кроме того, модуль 17 детектирования уровня сигнала может содержать АЦ преобразователь, микропроцессор и другие устройства, и выходной сигнал модуля 16 детектирования одиночной частоты может подвергаться АЦ преобразованию, и уровень сигнала может быть рассчитан с помощью микропроцессора.
Модуль 18 расчета расстояния рассчитывает расстояние до объекта 6 измерения на основе пика уровня сигнала, детектируемого модулем 17 детектирования уровня сигнала.
(Принцип 3 измерения)
Рассмотрим теперь фиг.15 - 19, со ссылкой на которые будет описан принцип измерения устройства измерения расстояния, и способа измерения расстояния, которые относятся к заявленному изобретению следующим образом.
Когда источник 13 сигнала выполняет двойную частотную модуляцию несущей волны с определенной частотой с использованием второго сигнала модуляции, который был частотно-модулирован первым модулирующим сигналом, и выводит сигнал с двойной модуляцией с мгновенной частотой f0+fD·m(t), бегущая волна VT в момент времени t, прошедшего от начала измерения, и в положении x становится частотно-модулированным незатухающим колебанием, которое выражено следующим Ур. (20):

где t обозначает время, прошедшее от начала измерения, c означает скорость света, А обозначает амплитуду, θ обозначает фазу, и любая одна точка на оси x представляет собой x=0. Кроме того, m(t) представляет собой ступенчато-изменяющийся сигнал, мгновенное значение которого увеличивается на Δx в первом периоде T, как показано во втором модулирующем и следующем Ур. (22), и представляет собой пилообразное колебание, представленное на фиг. 17 и в следующем Ур. (21):

Однако [] представляет максимальное целочисленное значение, которое не превышает значение. m(t) представляет собой пилообразное колебание с частотой fm, минимальным значением -1 и максимальным значением +1, как показано на фиг. 17.
Таким образом, время восстановления пилообразного колебания, показанного на фиг. 17, равно нулю, но пилообразное колебание может представлять собой колебание, которое имеет определенное время восстановления (то есть треугольное колебание).
x(t) представляет собой первый модулирующий сигнал, который изменяет частоту fm для m(t), и представляет собой сигнал в соответствии с фиг. 18 (ступенчатой формы).
Таким образом, когда x(t)=NΔx, (N=1, 2,...), m(t) является частотно-модулированным таким образом, что частота fm для m(t) соответствует следующему Ур. (23):
 (η - константа)
(η - константа)
Таким образом, x(t) представляет собой ступенчато изменяющийся сигнал, который увеличивается на Δx в конкретном первом периоде, но тот же принцип применяется, даже когда x(t) будет представлен ступенчатым сигналом, который уменьшается на Δx. В остальной части этого раздела будет описан ступенчатый сигнал, в котором x(t) увеличивается на Δx.
Очевидно, что первый период T первого модулирующего сигнала длиннее, чем период пилообразного колебания (время повторения) второго модулирующего сигнала. Кроме того, период пилообразного колебания второго модулирующего сигнала длиннее, чем период несущей волны.
Обозначим как dk расстояние до k-ого объекта 6 измерения, vk скорость, yk и φk размер и фазу коэффициента отражения, соответственно; тогда отраженная волна VRk от объекта 6 измерения может быть выражена следующим Ур. (24), где k=1, 2,...

В таком случае, сигнал VC смешанной волны, детектируемый модулем 3 детектирования смешанной волны, в местоположении, где x=xs, может быть выражен следующим Ур. (25):
И амплитуда сигнала Vc может быть выражена следующим Ур.(26):

На практике можно принять, что размер отраженной волны чрезвычайно мал, yk<<1, и член второй степени yk и выше можно игнорировать, поскольку они приблизительно равны нулю. Следовательно, уравнение можно аппроксимировать в виде следующего Ур. (27):

Теперь, если сделать t достаточно малым, можно принять, что vkt≡0, амплитуда VC может быть аппроксимирована в виде следующего Ур.(28) и влияние скорости vk можно устранить:

Кроме того, при выполнении аппроксимации в виде следующего Ур. (29)
Ур. (28) принимает форму следующего Ур. (30).

где А=1, поскольку константа A не содержит информацию в заявленном изобретении.
Когда x(t) = NΔx, компонент fk амплитуды k-ого объекта 6 измерения можно определить в соответствии со следующим Ур. (31), путем дифференциации фазы для а(t, xs):
Когда x(t)=NΔx равно dk·xs, расстоянию между объектом 6 измерения и модулем детектирования смешанной волны, fk представляет собой частоту fB, заданную следующим Ур. (32):
Следовательно, если а(t, xs) попадает в модуль 16 выбора одиночной частоты, такой как квадратурный детектор, полосовой фильтр и т.д., выбирают только частотный компонент fB, и детектируют уровень сигнала, становится возможным узнать, присутствует ли объект 6 измерения на расстоянии x(t)=NΔx.
В случае, когда квадратурный детектор используется как модуль 16 выбора одиночной частоты для выбора частотного компонента fB, выход R(x(t)) при x(t)=NΔx квадратурного детектирования может быть определен с помощью следующего Ур. (33):
Таким образом, выход R(x(t)) квадратурного детектирования называется спектром расстояния.
Уровень (интенсивность) спектра R (x(t)) расстояния выражается его абсолютным значением. То есть интенсивность |R(x(t))| может быть представлена следующим Ур. (34):

Как описано выше, в устройстве измерения расстояния и в способе измерения расстояния, относящимся к заявленному изобретению, детектируют смешанную волну, состоящую из бегущей волны и отраженной волны, отражаемой объектом 6 измерения; поэтому нет необходимости разделять бегущую волну и отраженную волну, и может быть получена простая конструкция, и может быть получено устройство измерения малых расстояний с малой стоимостью.
Кроме того, при определении спектра расстояния по смешанной волне, состоящей из бегущей волны, имеющей множество различных частотных компонентов, и ее отраженной волны, можно определить расстояние между объектом измерения и модулем детектирования смешанной волны по расстоянию, на котором интенсивность спектра расстояния принимает значение пика.
Когда расстояние до объекта измерения измеряют с использованием стоячей волны, в принципе, невозможно сделать время наблюдения меньшим, чем время, в течение которого формируется стоячая волна, после переключения частоты бегущей волны, при этом пик спектра расстояния подвергается влиянию эффекта Доплера, и генерируется ошибка измерения, но в заявленном изобретении, в принципе, отсутствует концепция переключения частоты, и время наблюдения может быть сокращено до такого уровня, что эффект Доплера можно фактически игнорировать, и можно точно проводить измерение расстояния.
Кроме того, не используется ни микропроцессор, и т.д., ни другое средство, которое может выполнять спектральный анализ с высокой скоростью, и сигнальный процессор выполнен в виде детектора огибающей, квадратичного детектора, синхронного детектора, квадратурного детектора, полосового фильтра, согласованного фильтра и других устройства, и при этом детектируют интенсивность (уровень сигнала) спектра расстояния: поэтому сигнальный процессор, который выполняет обработку приблизительно с такой же скоростью, как и скорость сигнального процессора, для которого используется микропроцессор и т.д., может быть получен с малой стоимостью. Таким образом, даже при малой стоимости, может быть получено устройство измерения расстояния, работающее с высокой скоростью обработки сигналов.
(Моделирование 3)
Далее, на основе приведенного выше принципа 3 измерения, будет выполнено моделирование с использованием устройства измерения расстояния, показанного на фиг. 19 и 21.
При таком моделировании, как показано на фиг. 19 и 21, устройство измерения расстояния имеет синусоидальную волну с частотой f0=24,1 ГГц, с максимальным сдвигом fD=37,5 МГц частоты, периодом модуляции первого модулирующего сигнала T=20 мкс, мгновенным увеличением значения первого модулирующего сигнала Δx=0,2 м, и константой, которая определяет частоту второго модулирующего сигнала m(t) η=1/75, и выводит сигнал с мгновенной частотой f0+fD·m(t). И бегущую волну VT, выраженную Ур. (20), передают из модуля 2 передачи. Смешанную волну VC(t, 0), состоящую из отраженной волны VRk, отраженной k-ым объектом 6 измерения, и бегущей волны VT, детектируют с помощью модуля 3 детектирования смешанной волны. На основе детектируемой смешанной волны VC, сигнальный процессор 19 (24) рассчитывает положение объекта 6 измерения.
(Моделирование 3-1)
На фиг. 19 представлена иллюстрация устройства измерения расстояния, имеющего сигнальный процессор 19, выполненный с детектором 20 огибающей, который детектирует амплитудный компонент с помощью квадратурного детектора 21, который выбирает только частотный компонент fB=1 МГц, модуль 22 детектирования уровня, который детектирует уровень сигнала, и модуль 23 расчета расстояния.
На фиг. 20 показан график, который представляет положение (x(t)) и интенсивность спектра |R(x(t))| расстояния, когда выполняют моделирование при условиях, в которых два объекта 6 и 6 измерения расположены на расстояниях d1=12 м и d2=20 м, соответственно, при этом коэффициент отражения γ1=0,01 и фаза φ1=τ для объекта 6 измерения, расположенного на расстоянии d1=12 м, и коэффициент отражения γ2=0,01 и фаза φ2=τ для объекта 6 измерения, расположенного на расстоянии d2=20 м. Как можно видеть на фиг. 20, пики интенсивности спектра расстояния получают в точках 12 м и 20 м, соответственно. Это обозначает, что, даже если квадратурный детектор и т.д. используют вместо микропроцессора и т.д., можно правильно измерять расстояние.
(Моделирование 3-2)
На фиг. 21 представлена иллюстрация устройства измерения расстояния, имеющего сигнальный процессор 24, выполненный с детектором огибающей для детектирования 25 амплитудного компонента, двумя полосовыми фильтрами 26a и 26b, детектором огибающей для детектирования 27 уровня сигнала, и модулем 28 расчета расстояния 28.
На фиг. 22 показан график, который представляет положение (x(t)) и интенсивность спектра |R(x(t))| расстояния, когда выполняют моделирование в условиях, в которых два объекта 6 и 6 измерения расположены на расстояниях d1=12 м и d2=20 м, соответственно, коэффициент отражения γ1=0,01 и фаза φ1=τ для объекта 6 измерения, который расположен на расстоянии d1=12 м, коэффициент отражения γ2=0,01 и фаза φ2=τ для объекта 6 измерения, который расположен на расстоянии d2=20 м, при этом полосовой фильтр выбирает частоту fB=1 МГц и Q=20.
Как можно видеть на фиг. 22, пики размера спектра расстояния получают в точках 12 м и 20 м, соответственно. Это обозначает, что, даже если полосовой фильтр и т.д. используют вместо микропроцессора и т.д., можно правильно измерять расстояние. В представленном примере два полосовых фильтра соединены последовательно, но количество полосовых фильтров не должно быть ограничено 2, и, конечно, произвольное количество полосовых фильтров можно использовать в соответствии с потребностью.
Таким образом, в приведенном выше описании смешанную волну детектируют с использованием одного модуля 3 детектирования смешанной волны, но множество модулей 3,…, 3 детектирования смешанной волны может быть установлено в разных местах, соответственно, и на основе смешанных волн, детектируемых ими, можно получать спектр расстояния и можно измерять положение цели 6 измерения.
Промышленная применимость
Настоящее изобретение может использоваться в качестве системы предотвращения столкновений при установке устройства измерения расстояния на движущихся объектах, таких, как автомобили и т.д., в качестве датчиков измерения уровня жидкости и порошка, или датчиков, которые детектируют присутствие и положение человека в системах безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ АКУСТИЧЕСКИХ СИГНАЛОВ | 1991 |
|
RU2020477C1 |
| Компланарный волновод электрооптического модулятора бегущей волны на базе интерферометра Маха-Цендера | 2018 |
|
RU2680990C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ВОЛОКНА, СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВОЛОКНА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ПОВЕРХНОСТИ | 1995 |
|
RU2152589C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1997 |
|
RU2120647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА | 2016 |
|
RU2629651C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАНОПЕРЕМЕЩЕНИЙ | 2017 |
|
RU2658112C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО РАССТОЯНИЯ | 2020 |
|
RU2738876C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ КРОВИ | 2015 |
|
RU2610559C1 |
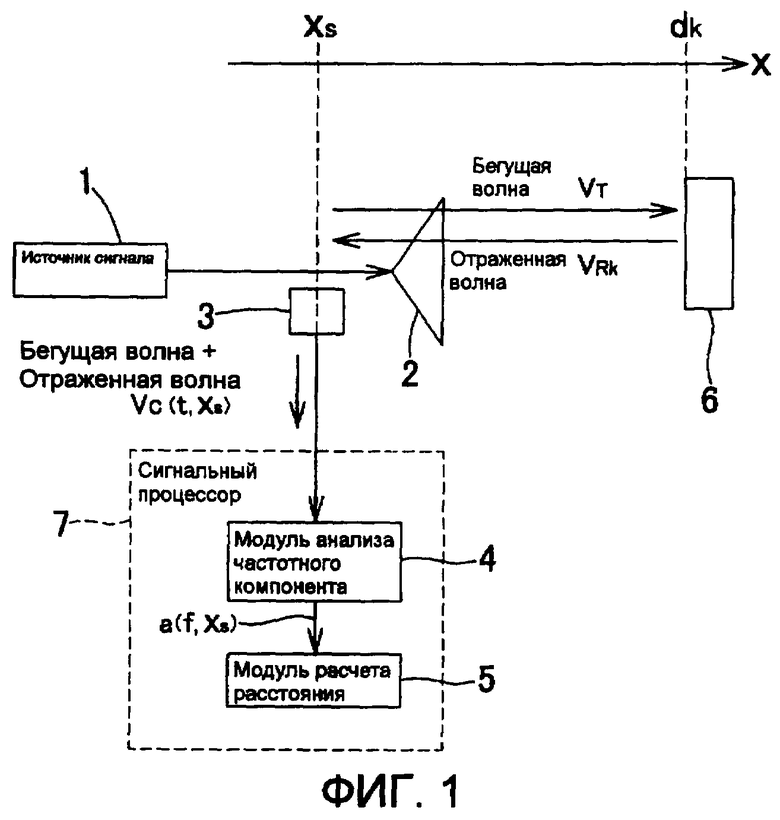
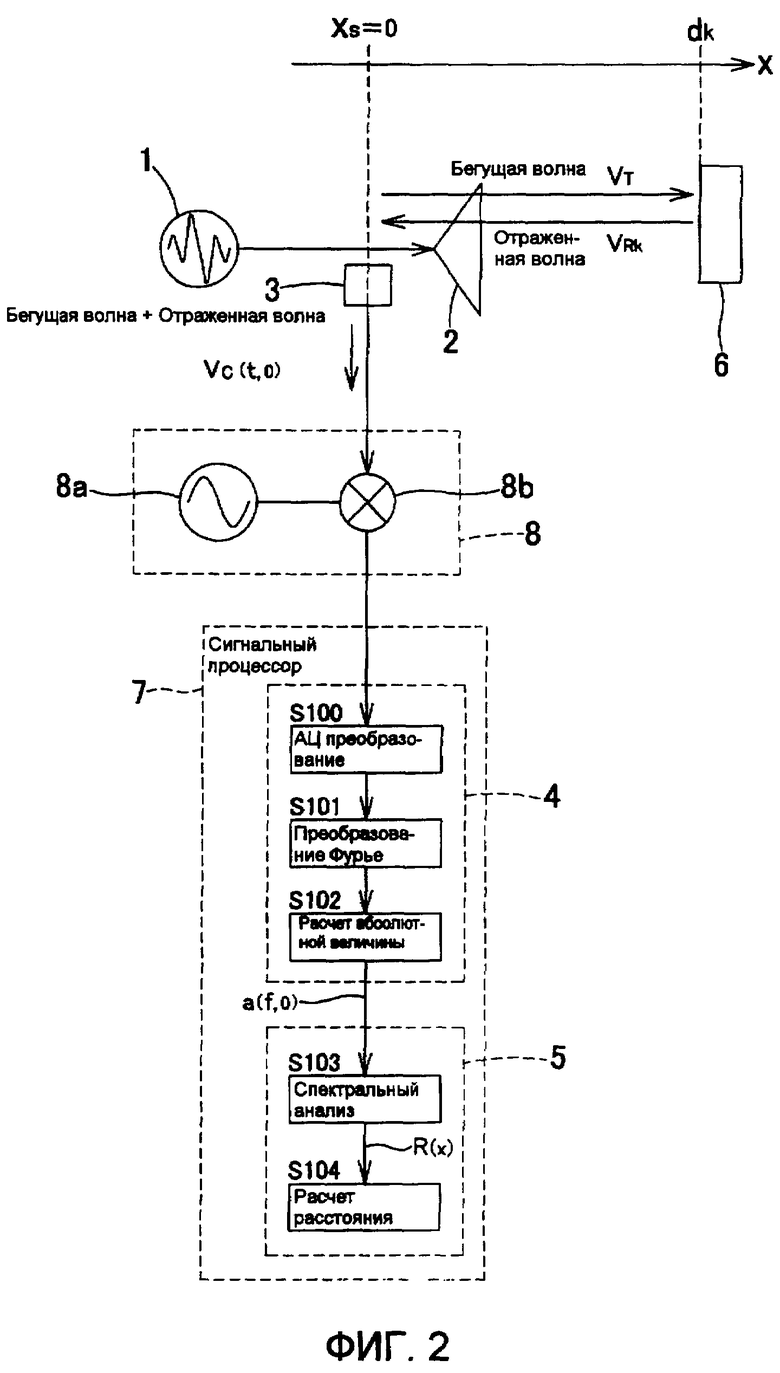
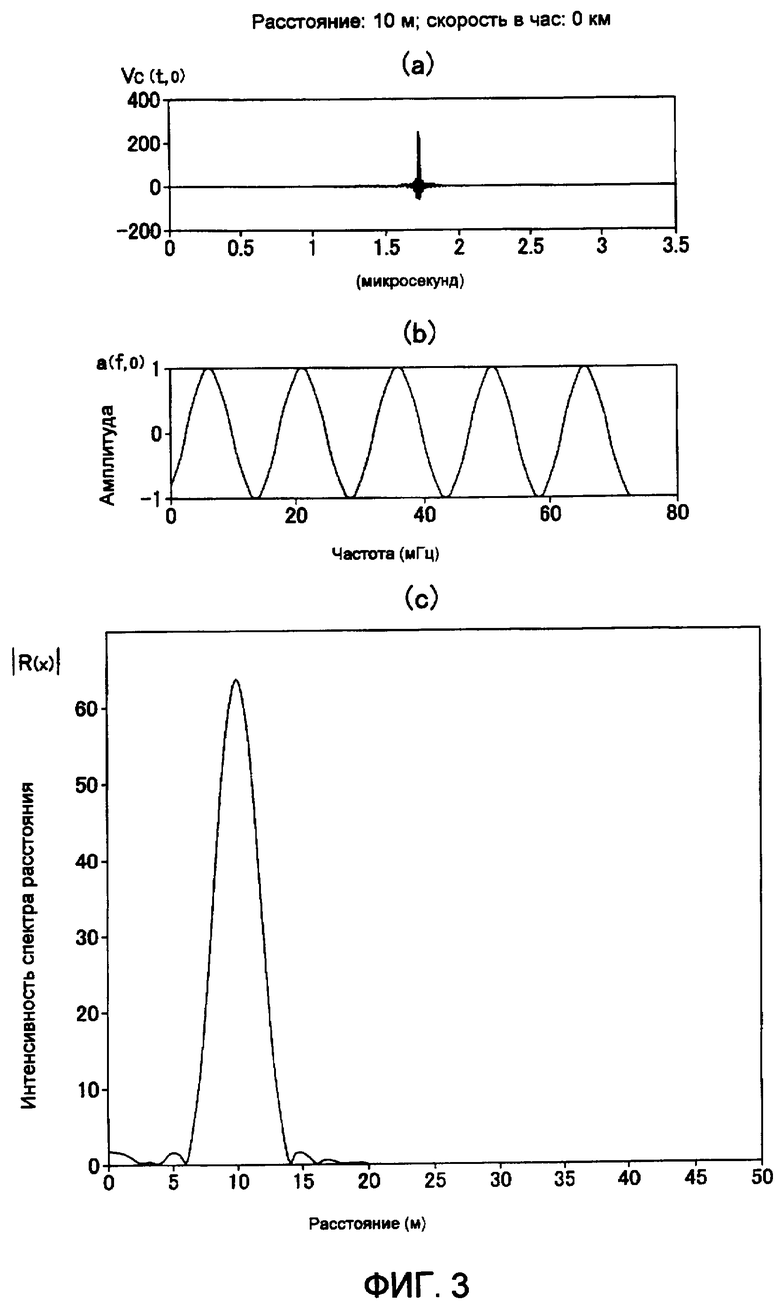
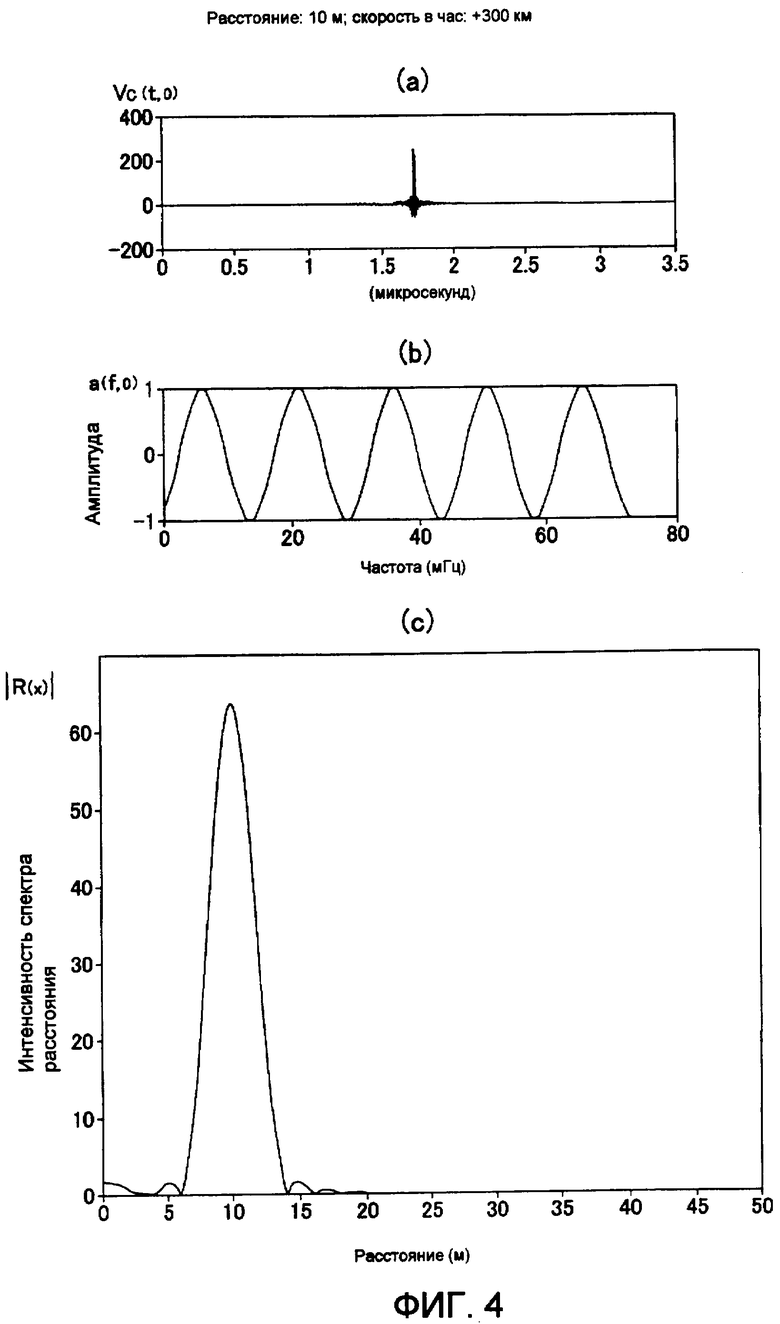
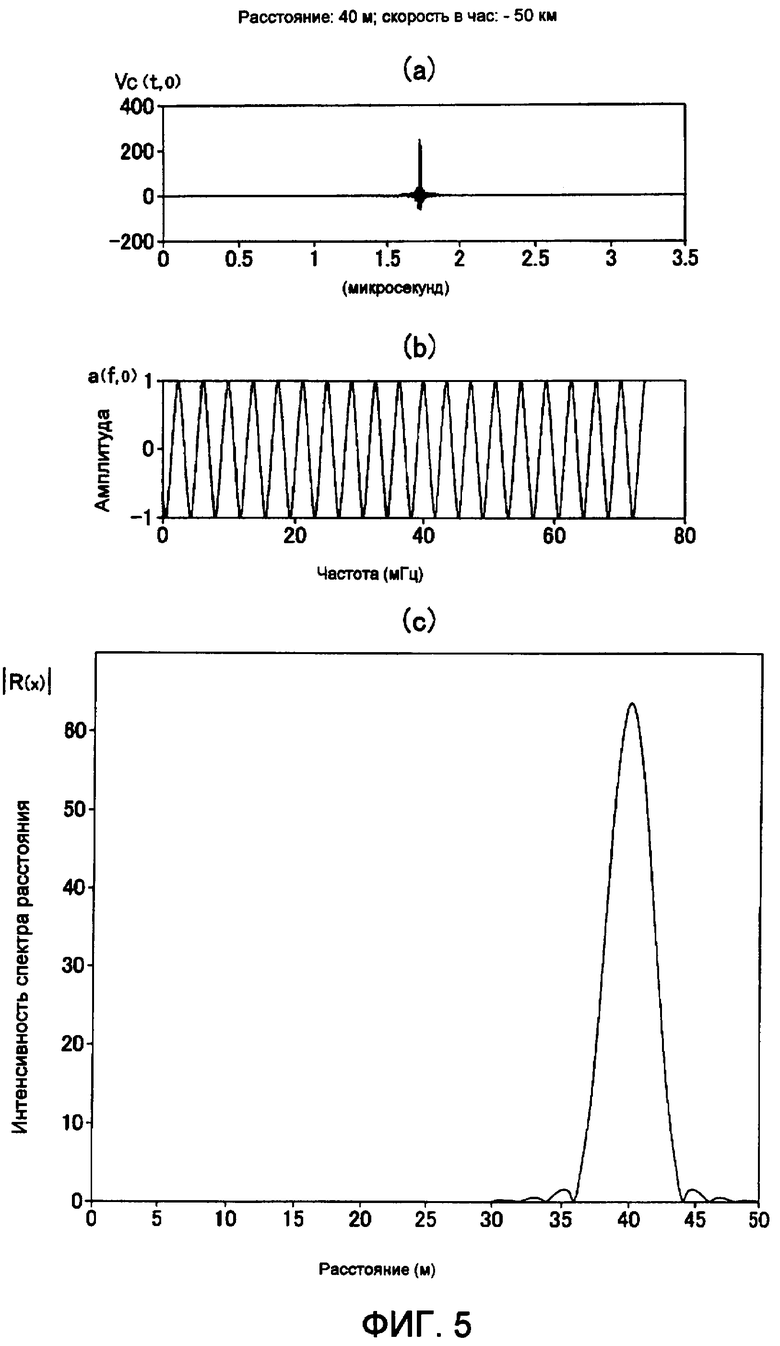
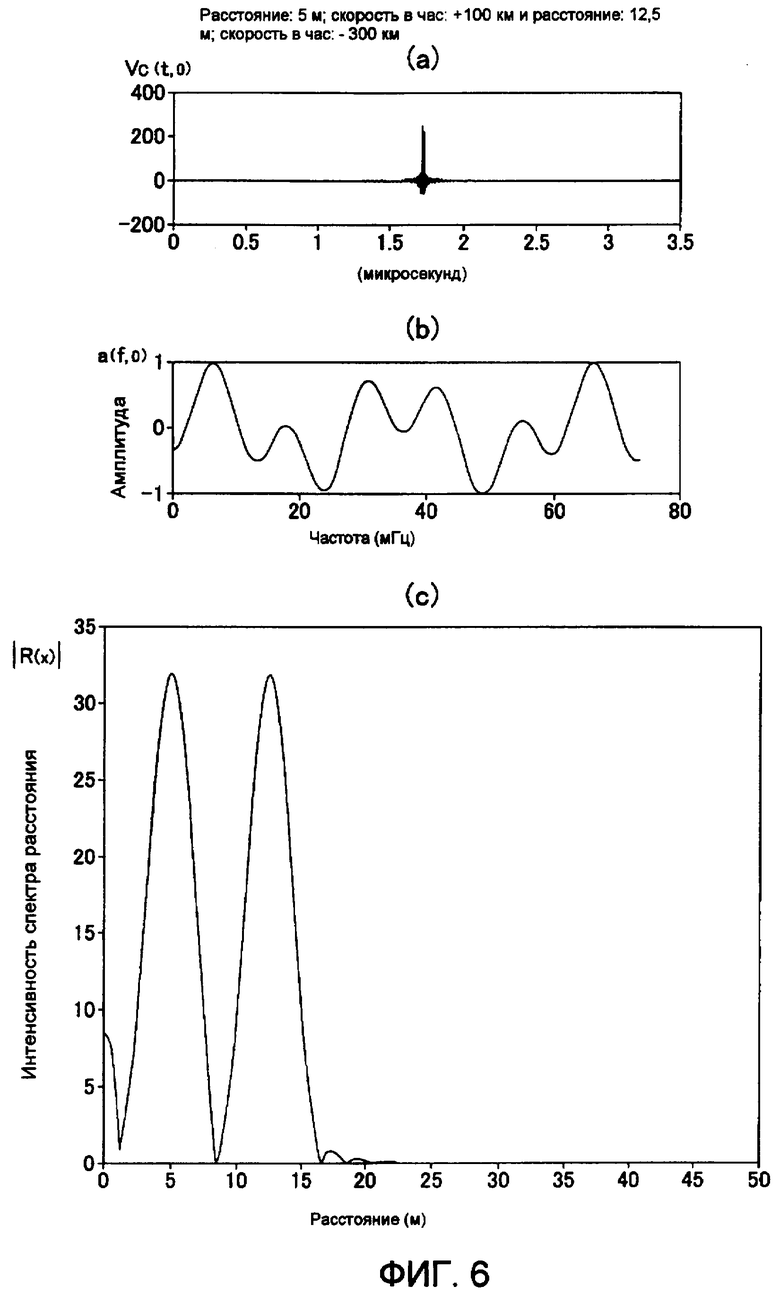
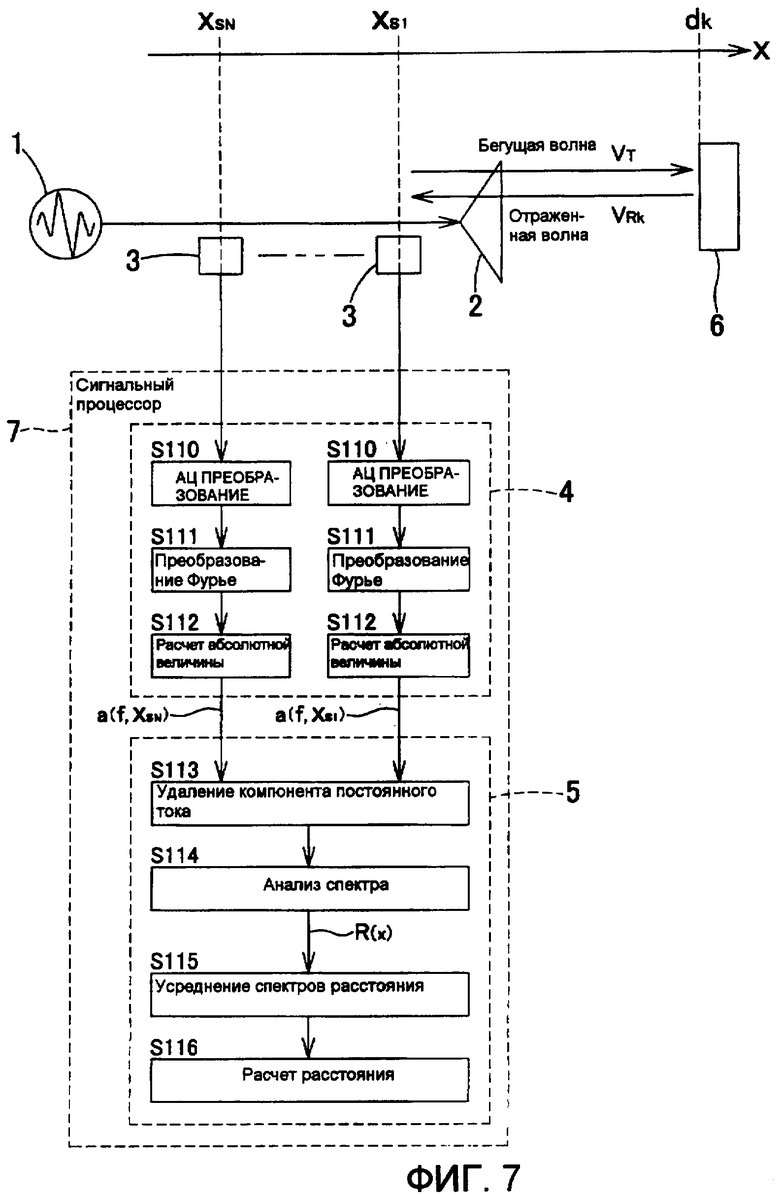
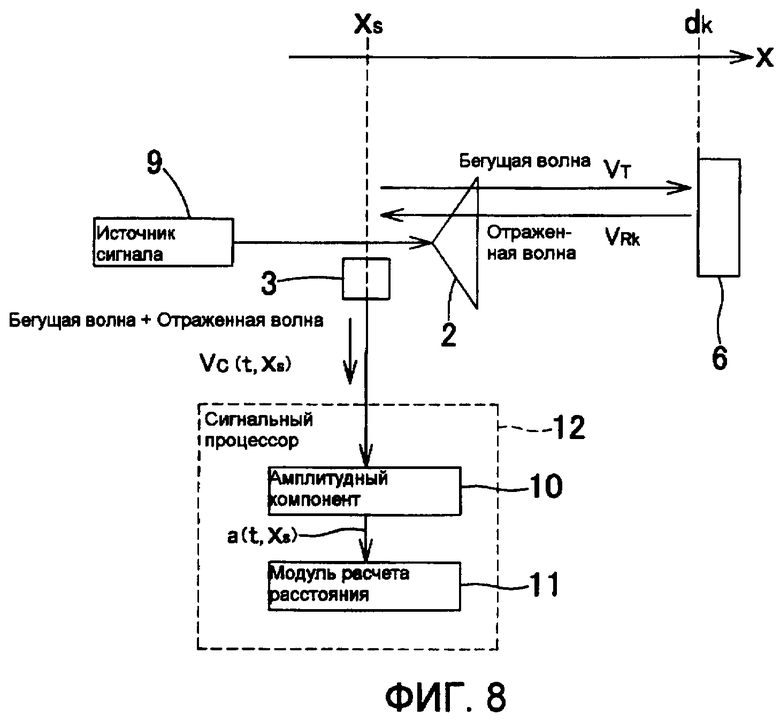
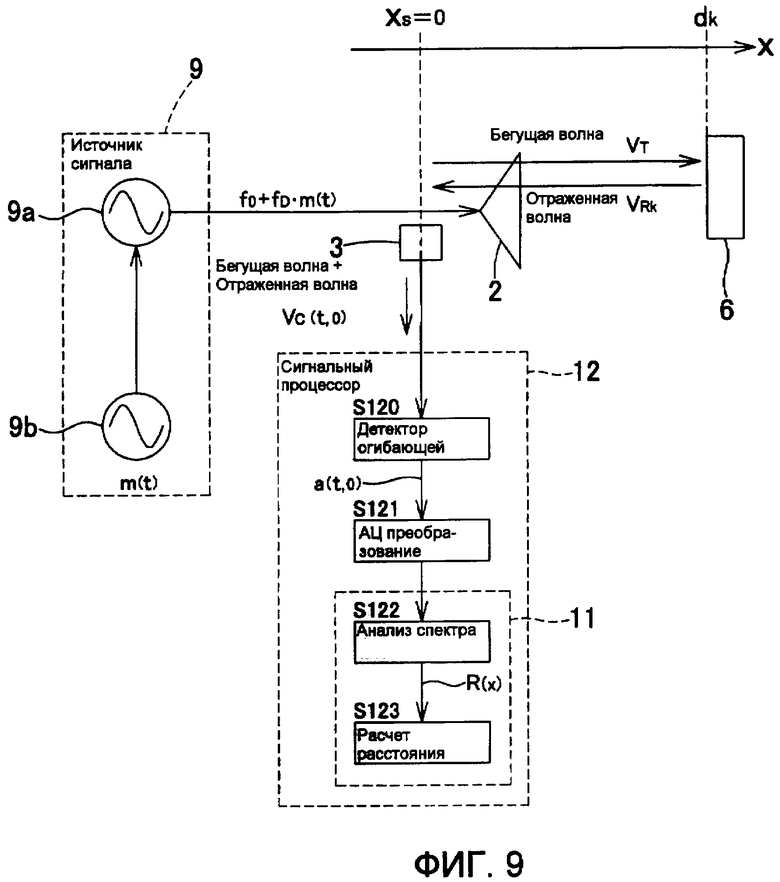
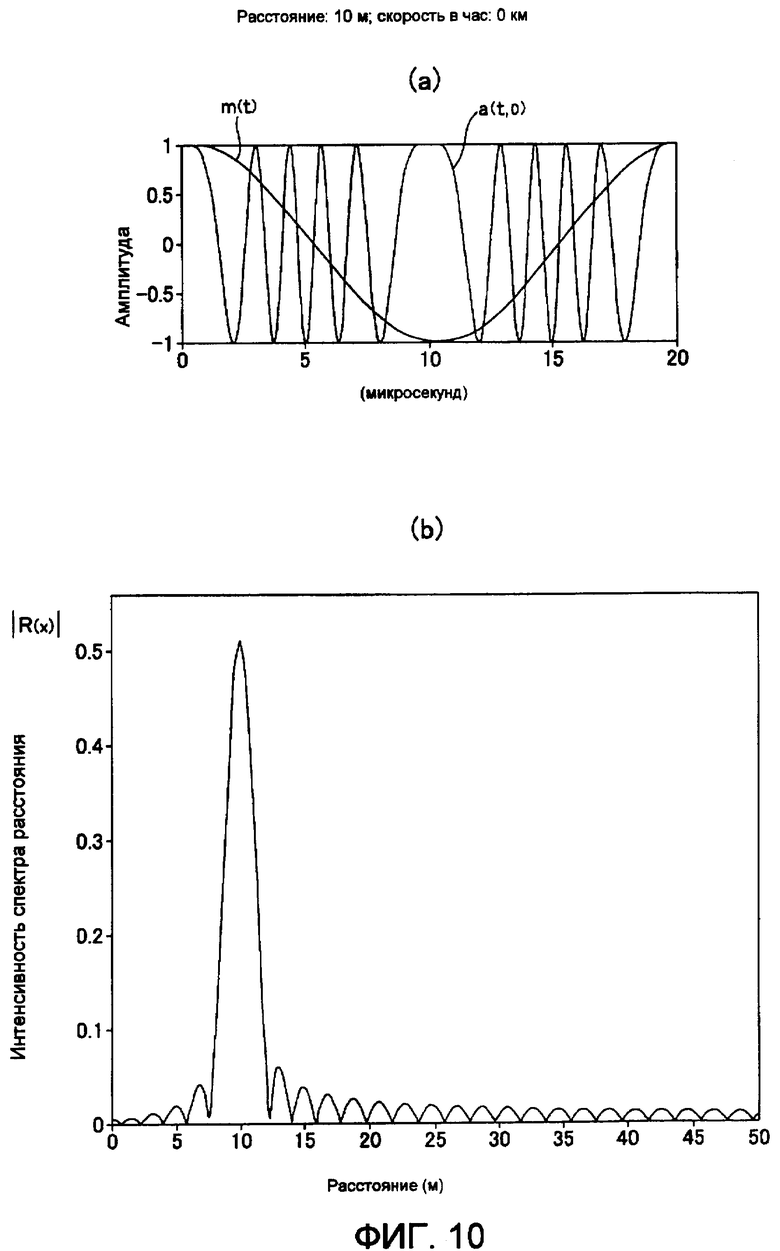
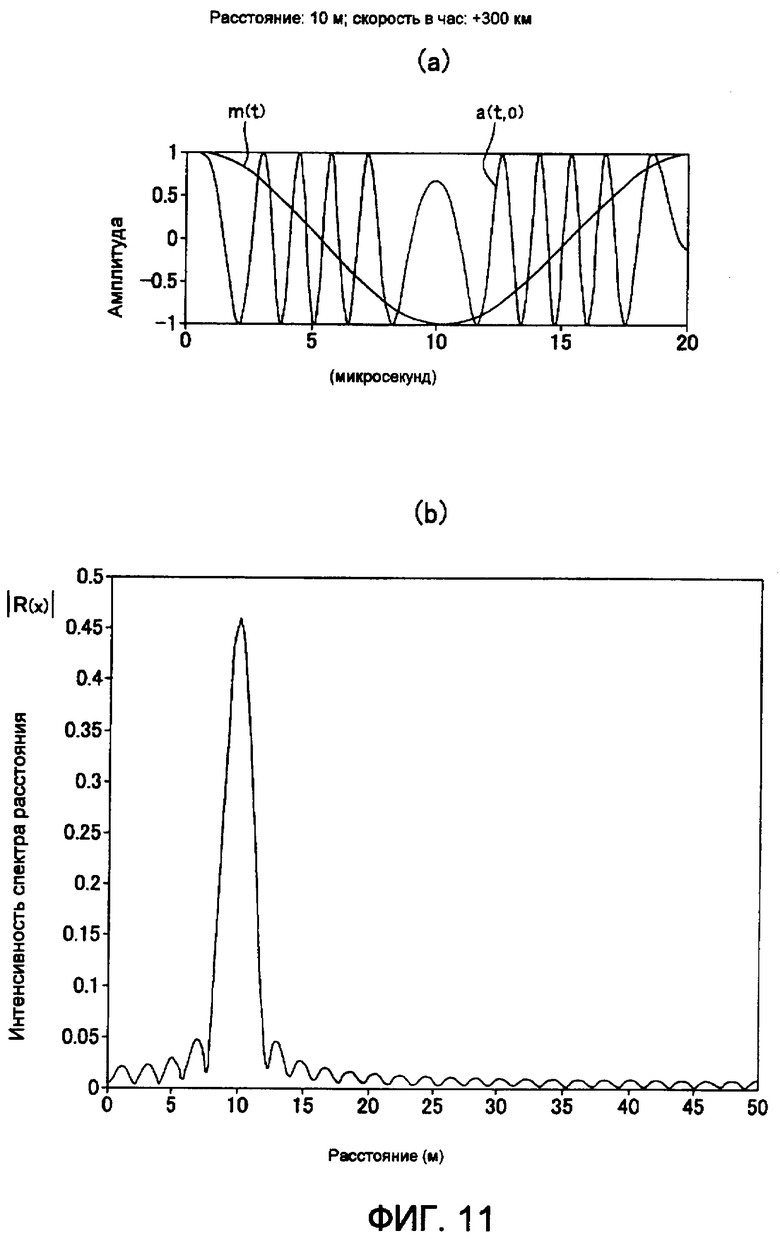
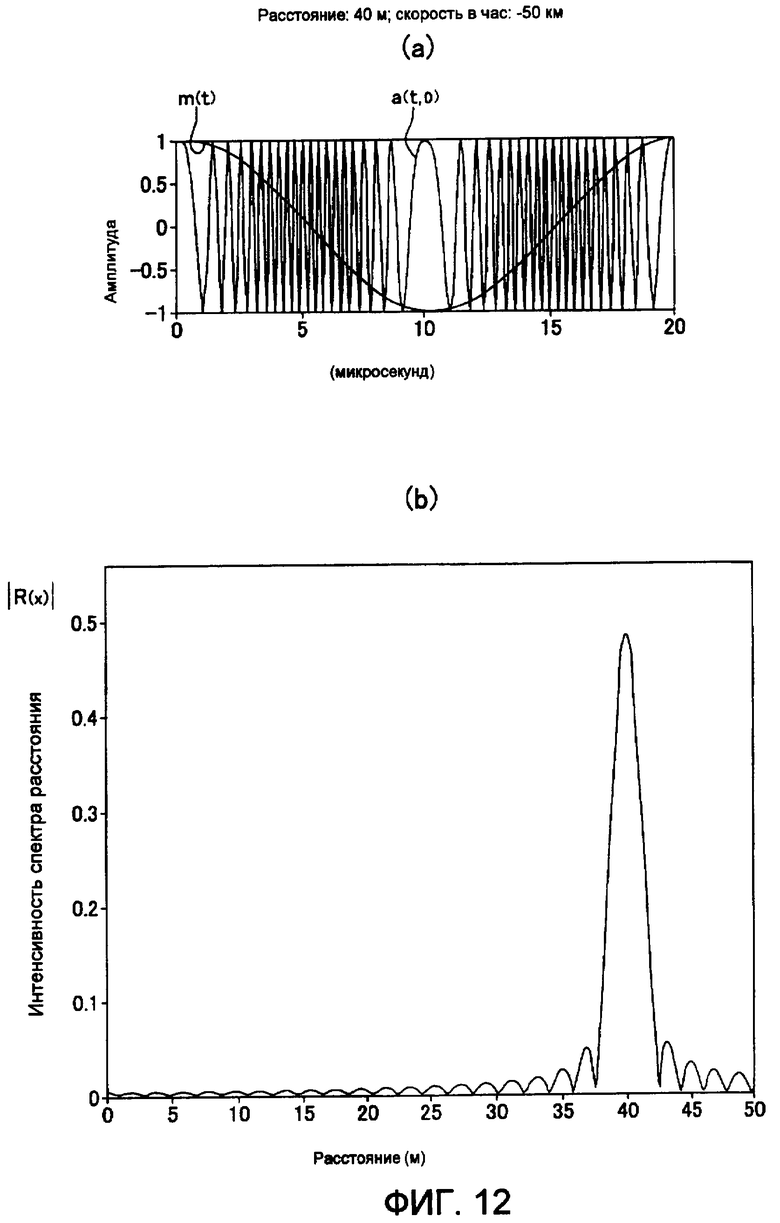
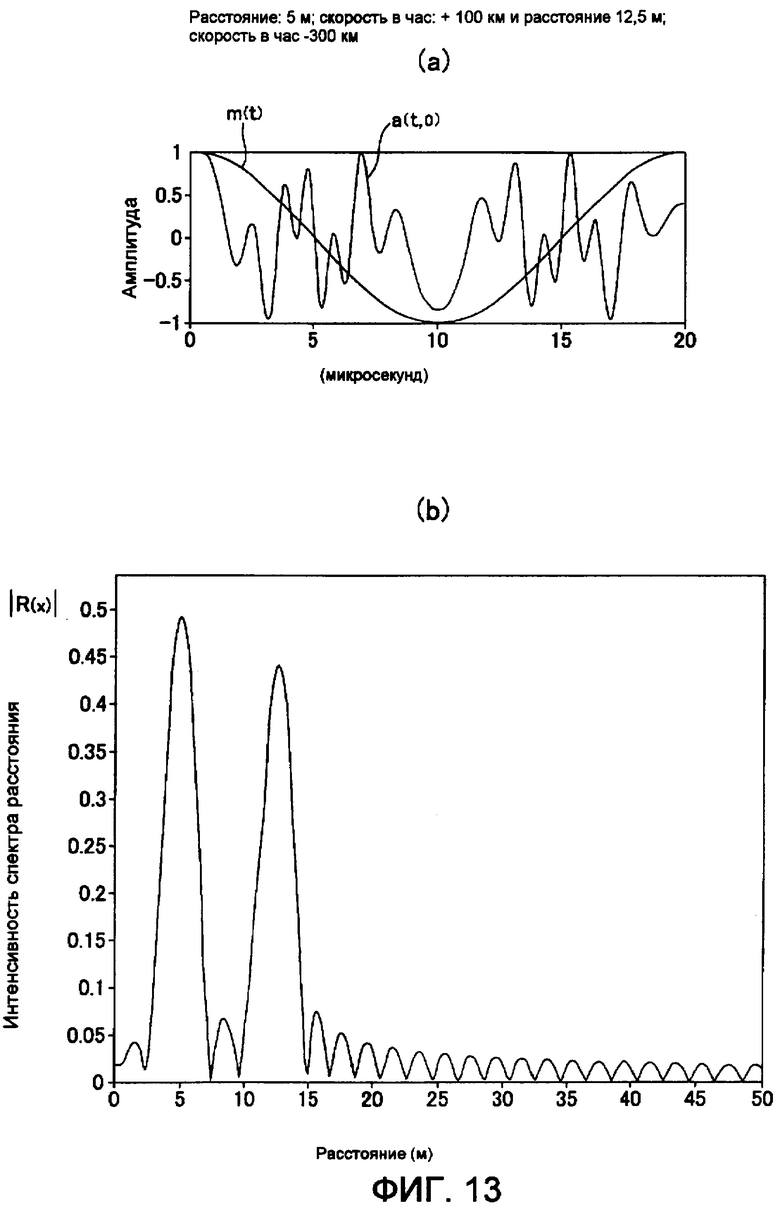
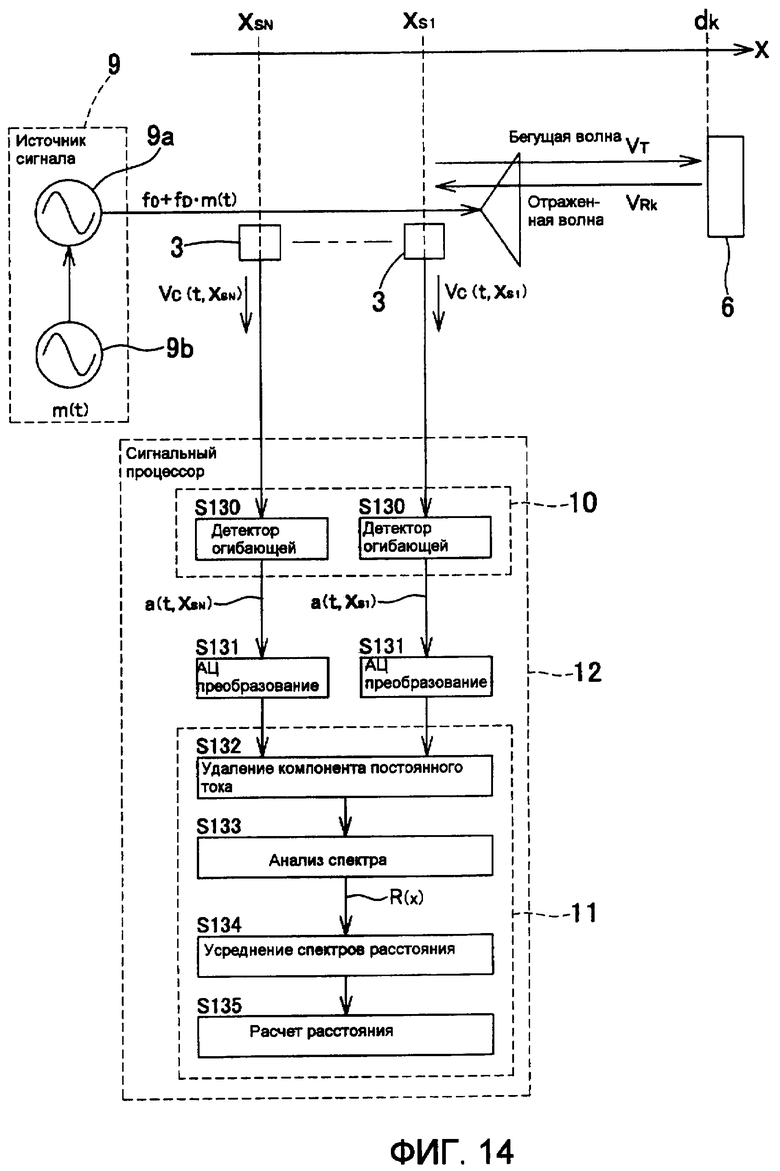
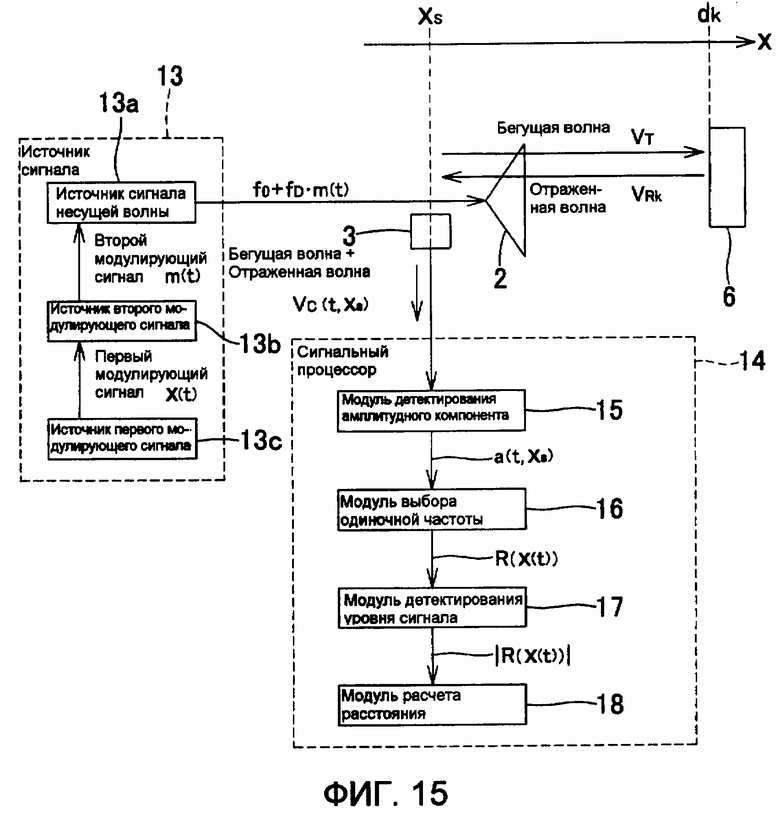
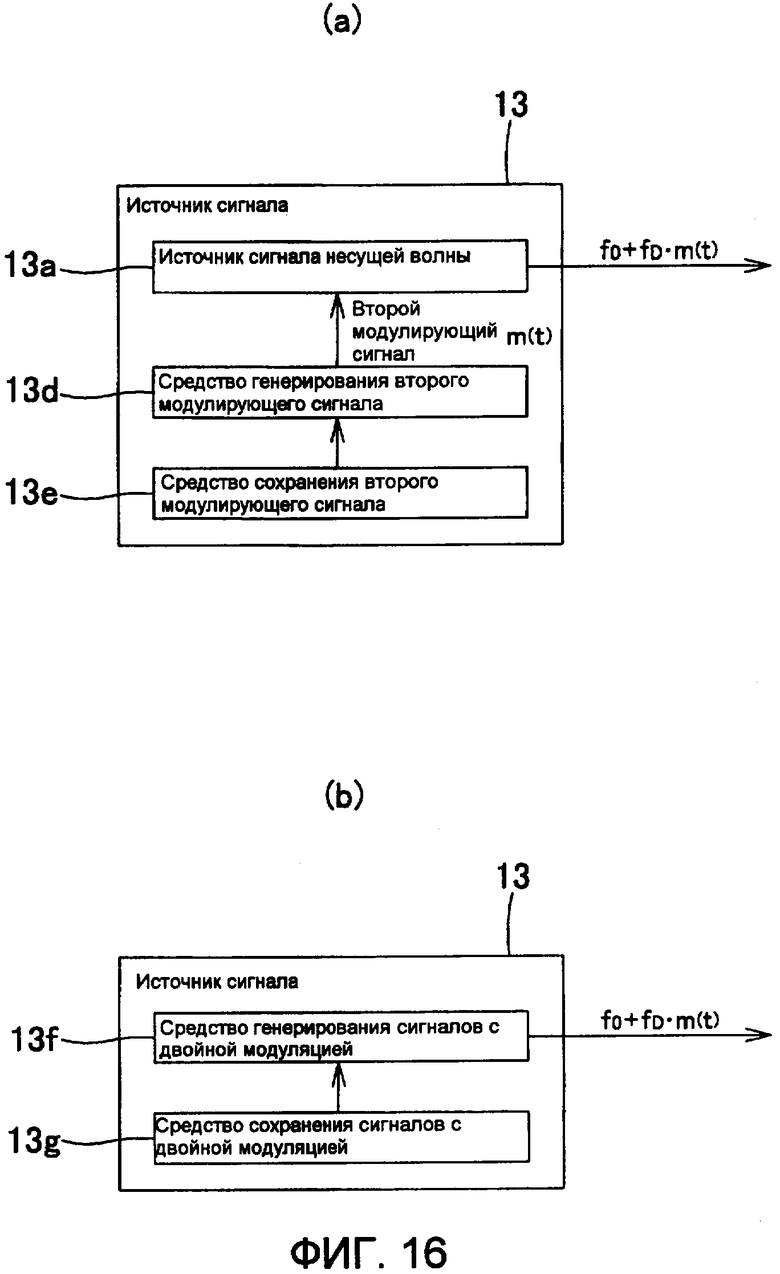
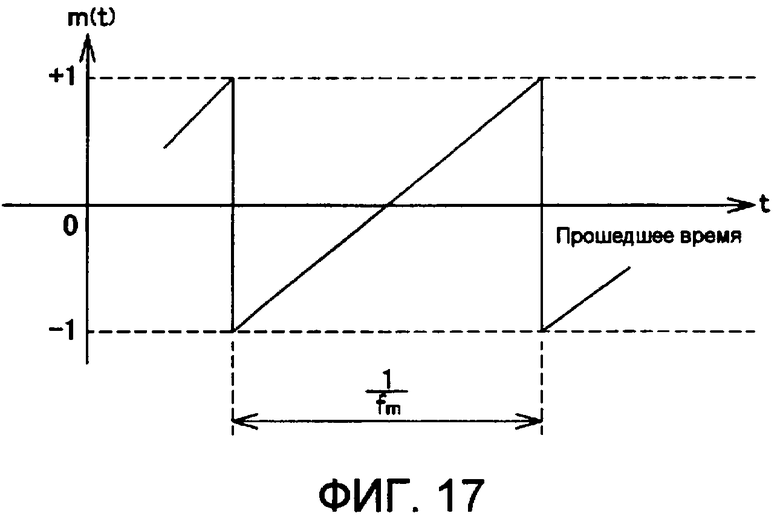
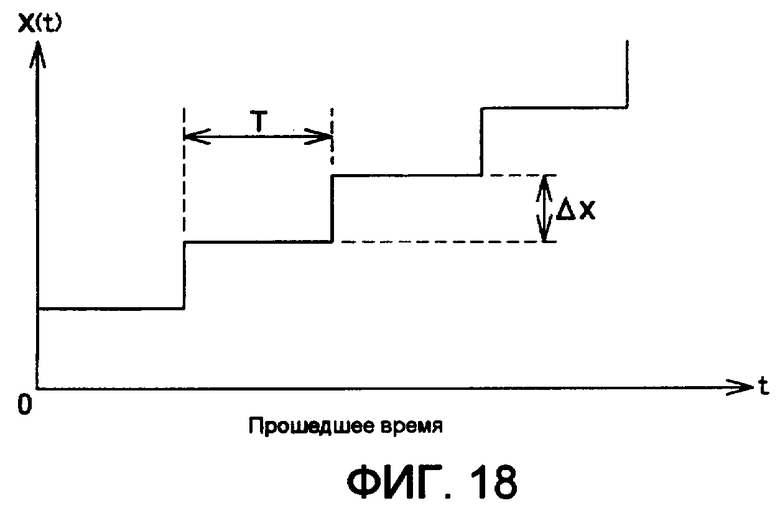
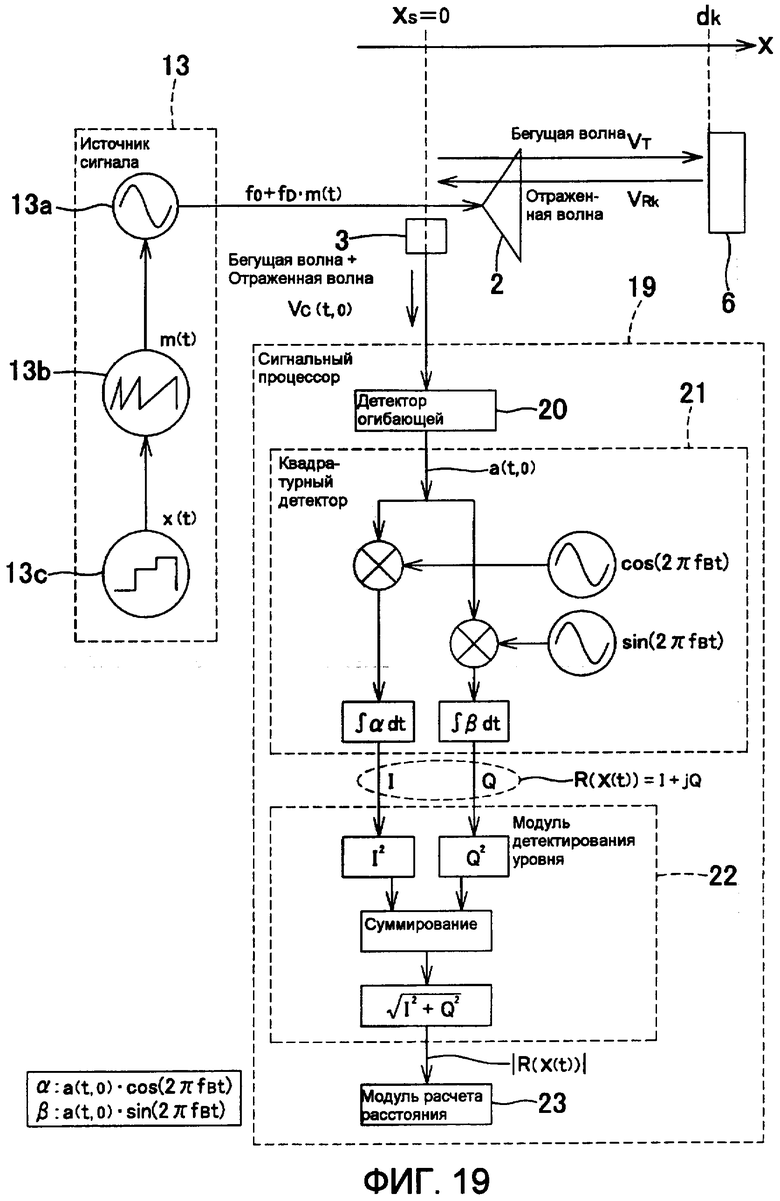
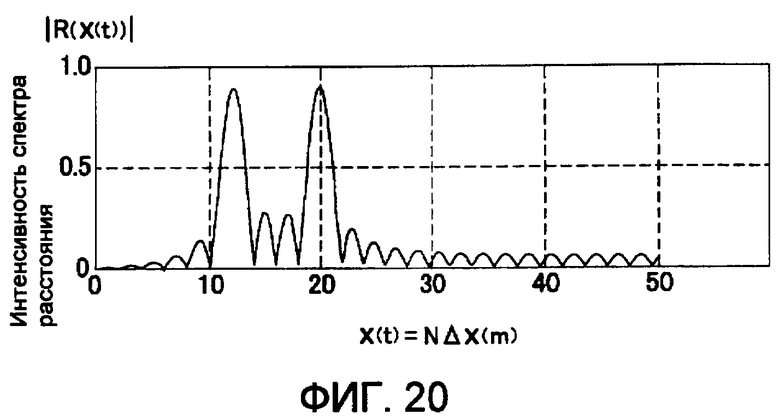
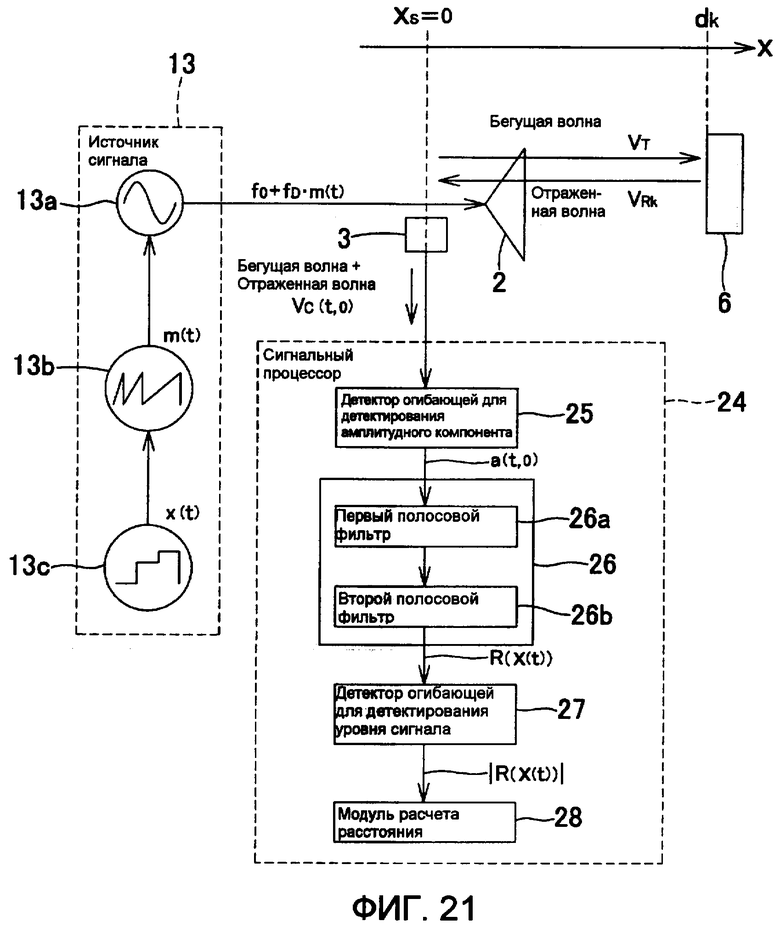
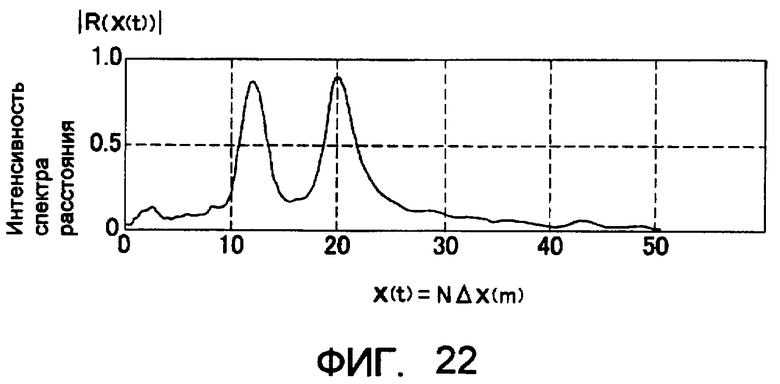
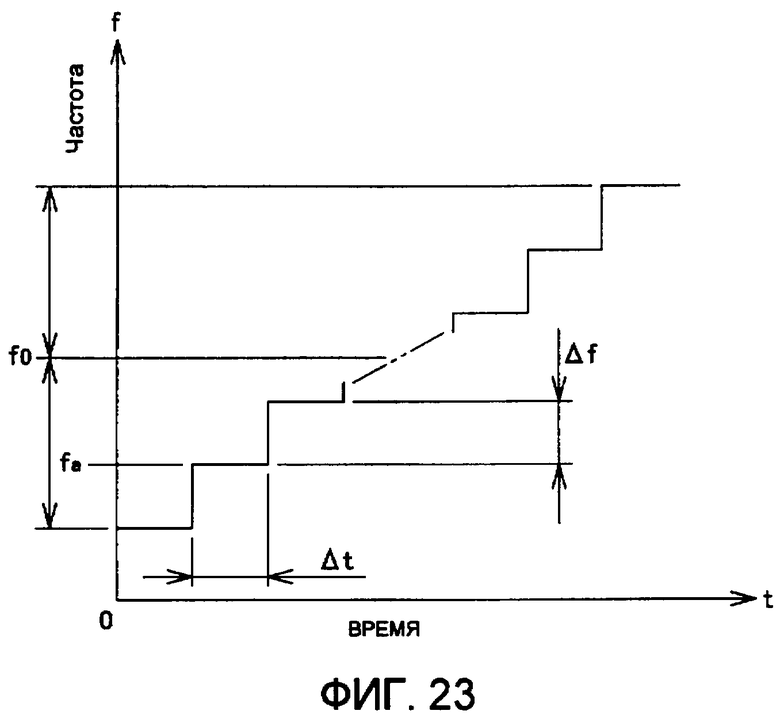
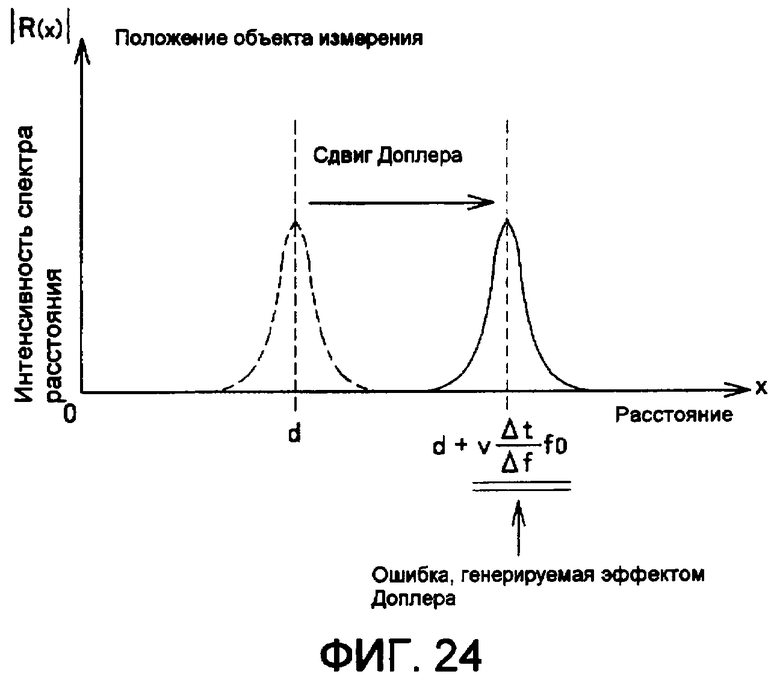
Предложены устройство измерения расстояния и способ измерения расстояния Достигаемым техническим результатом изобретения являются простота исполнения, возможность измерения малых расстояний, уменьшение ошибок измерения. Заявленное устройство измерения расстояния включает в себя источник сигнала, предназначенный для вывода сигнала, имеющего множество различных частотных компонентов в пределах определенной полосы пропускания, модуль передачи, предназначенный для передачи сигнала в виде волнового колебания, модуль детектирования смешанной волны, предназначенный для детектирования смешанной волны VC, полученной в результате смешения переданной бегущей волны VT и отраженной волны VRk, состоящей из бегущей волны VT, отраженной от объекта измерения, модуль анализа частотного компонента, предназначенный для анализа частотного компонента детектируемой смешанной волны VC, и модуль расчета расстояния, предназначенный для получения спектра расстояния, в результате дополнительной обработки проанализированных данных с использованием спектрального анализа, и рассчитывающий, таким образом, расстояние до объекта измерения. 6 н. и 16 з.п. ф-лы, 24 ил.
1. Устройство измерения расстояния, которое измеряет расстояние до объекта измерения, содержащее:
источник сигнала, который выводит сигнал, имеющий множество разных частотных компонентов в пределах определенной полосы частот;
модуль передачи, который передает этот сигнал в виде волнового колебания;
модуль детектирования смешанной волны, который детектирует смешанную волну, состоящую из бегущей волны, включающей в себя либо волновое колебание, передаваемое модулем передачи, либо сигнал, выводимый источником сигнала, и отраженной волны волнового колебания, переданного модулем передачи и отраженного от объекта измерения;
модуль анализа частотного компонента, который анализирует частотный компонент смешанной волны, детектированной модулем детектирования смешанной волны; и
модуль расчета расстояния, который определяет спектр расстояния путем дополнительной обработки анализируемых данных с использованием спектрального анализа и рассчитывает расстояние до объекта измерения.
2. Устройство измерения расстояния по п.1, в котором источник сигнала содержит множество генераторов одиночной частоты, каждый из которых генерирует разный компонент с одиночной частотой, и сумматор, который синтезирует сигналы, генерируемые множеством генераторов одиночной частоты.
3. Устройство измерения расстояния по п.1, в котором источник сигнала содержит генератор одиночной частоты, который генерирует компонент с одиночной частотой, и модулятор, который модулирует сигнал, генерируемый генератором одиночной частоты.
4. Устройство измерения расстояния по п.1, в котором источник сигнала содержит источник шума, который выводит частотный компонент в пределах определенной полосы частот.
5. Устройство измерения расстояния по любому из пп.1-4, в котором модуль анализа частотного компонента включает в себя аналого-цифровой (АЦ) преобразователь, который преобразует смешанную волну, детектируемую модулем детектирования смешанной волны, в цифровой сигнал, и сигнальный процессор, который анализирует частотные компоненты данных, выводимых из АЦ преобразователя, и рассчитывает размер каждого частотного компонента.
6. Устройство измерения расстояния по любому из пп.1-4, в котором модуль анализа частотного компонента включает в себя множество полосовых фильтров и модуль детектирования уровня, который детектирует выходной уровень полосового фильтра.
7. Устройство измерения расстояния по любому из пп.1-4, в котором модуль расчета расстояния рассчитывает спектр расстояния, подвергая данные, проанализированные модулем анализа частотного компонента, анализу Фурье.
8. Устройство измерения расстояния по п.5, в котором модуль расчета расстояния рассчитывает спектр расстояния, подвергая данные, проанализированные модулем анализа частотного компонента, анализу Фурье.
9. Устройство измерения расстояния по п.6, в котором модуль расчета расстояния рассчитывает спектр расстояния, подвергая данные, проанализированные модулем анализа частотного компонента, анализу Фурье.
10. Устройство измерения расстояния по любому из пп.1-4, в котором множество модулей детектирования смешанной волны расположено в разных положениях;
модуль анализа частотного компонента анализирует частотные компоненты каждой смешанной волны, детектируемой модулями детектирования смешанной волны; и
модуль расчета расстояния рассчитывает спектр расстояния, используя проанализированные данные частотного компонента множества полученных смешанных волн.
11. Устройство измерения расстояния по п.5, в котором
множество модулей детектирования смешанной волны расположено в разных положениях;
модуль анализа частотного компонента анализирует частотные компоненты каждой смешанной волны, детектируемой модулями детектирования смешанной волны; и
модуль расчета расстояния рассчитывает спектр расстояния, используя проанализированные данные частотного компонента множества полученных смешанных волн.
12. Устройство измерения расстояния по п.6, в котором
множество модулей детектирования смешанной волны расположено в разных положениях;
модуль анализа частотного компонента анализирует частотные компоненты каждой смешанной волны, детектируемой модулями детектирования смешанной волны; и
модуль расчета расстояния рассчитывает спектр расстояния, используя проанализированные данные частотного компонента множества полученных смешанных волн.
13. Устройство измерения расстояния по п.7, в котором
множество модулей детектирования смешанной волны расположено в разных положениях;
модуль анализа частотного компонента анализирует частотные компоненты каждой смешанной волны, детектируемой модулями детектирования смешанной волны; и
модуль расчета расстояния рассчитывает спектр расстояния, используя проанализированные данные частотного компонента множества полученных смешанных волн.
14. Способ измерения расстояния, который измеряет расстояние до объекта измерения, содержащий этапы, на которых:
передают модулем передачи сигнал, выводимый источником сигнала, имеющий множество различных частотных компонентов в определенной полосе частот, в виде волнового колебания;
детектируют смешанную волну, состоящую из бегущей волны, включающей в себя либо передаваемое модулем передачи волновое колебание, либо сигнал, выводимый источником сигнала, и отраженной волны в виде переданного модулем передачи волнового колебания, отраженного от объекта измерения;
анализируют частотный компонент детектированной смешанной волны; и определяют спектр расстояния, дополнительно подвергая данные, проанализированные с использованием анализа частотного компонента, спектральному анализу, и, таким образом, рассчитывают расстояние до объекта измерения.
15. Устройство измерения расстояния, которое измеряет расстояние до объекта измерения, содержащее:
источник сигнала, который выводит частотно-модулированный сигнал, полученный путем частотной модуляции несущей волны с определенной частотой, сигналом с произвольной частотой,
модуль передачи, который передает частотно-модулированный сигнал в виде волнового колебания;
модуль детектирования смешанной волны для детектирования смешанной волны, состоящей из бегущей волны, включающей в себя либо волновое колебание, переданное из модуля передачи, либо частотно-модулированный сигнал, выведенный из источника сигнала, и отраженной волны в виде волнового колебания, переданного из модуля передачи, отраженного от объекта измерения;
модуль детектирования амплитудного компонента, который детектирует амплитудный компонент смешанной волны, детектированной модулем детектирования смешанной волны; и
модуль расчета расстояния, который определяет спектр расстояния, дополнительно подвергая амплитудный компонент, детектированный модулем детектирования амплитудного компонента, спектральному анализу, и рассчитывает расстояние до объекта измерения.
16. Устройство измерения расстояния по п.15, в котором модуль расчета расстояния рассчитывает спектр расстояния, подвергая амплитудный компонент, детектируемый модулем детектирования амплитудного компонента, анализу Фурье.
17. Устройство измерения расстояния по п.15 или 16, в котором множество модулей детектирования смешанной волны расположено в разных положениях;
модуль детектирования амплитудного компонента детектирует амплитудные компоненты каждой смешанной волны, детектированной модулями детектирования смешанной волны; и
модуль расчета расстояния рассчитывает спектр расстояния, используя данные амплитудного компонента множества полученных смешанных волн.
18. Способ измерения расстояния, который измеряет расстояние до объекта измерения, содержащий этапы, на которых:
модулем передачи передают сигнал, полученный в источнике сигнала путем частотной модуляции несущей волны с определенной частотой, сигналом с произвольной частотой, в качестве волнового колебания;
детектируют смешанную волну, состоящую из бегущей волны, включающей в себя либо переданное модулем передачи волновое колебание, либо частотно-модулированный сигнал, полученный в источнике сигнала, и отраженной волны в виде переданного модулем передачи волнового колебания, отраженного от объекта измерения;
детектируют амплитудный компонент детектированной смешанной волны; и
определяют спектр расстояния, дополнительно подвергая амплитудный компонент спектральному анализу, и рассчитывают, таким образом, расстояние до объекта измерения.
19. Устройство измерения расстояния, которое измеряет расстояние до объекта измерения, содержащее:
источник сигнала, который выводит сигнал с двойной частотой модуляцией, полученный в результате двойной частотной модуляции несущей волны с определенной частотой вторым модулирующим сигналом, заранее частотно-модулированным первым модулирующим сигналом;
модуль передачи, который передает сигнал с двойной частотной модуляцией в качестве волнового колебания;
модуль детектирования смешанной волны для детектирования смешанной волны, состоящей из бегущей волны, включающей в себя либо волновое колебание, переданное модулем передачи, либо сигнал с двойной модуляцией, выведенный из источника сигнала, и отраженной волны в виде волнового колебания, переданного из модуля передачи, отраженного от объекта измерения;
модуль детектирования амплитудного компонента, который детектирует амплитудный компонент смешанной волны, детектированной модулем детектирования смешанной волны;
модуль выбора одиночной частоты, который выбирает один определенный частотный компонент из амплитудных компонентов, детектированных модулем детектирования амплитудного компонента;
модуль детектирования уровня сигнала, который детектирует уровень сигнала, полученный модулем выбора одиночной частоты; и
модуль расчета расстояния, который рассчитывает расстояние до объекта измерения на основе уровня сигнала, полученного модулем детектирования уровня сигнала.
20. Устройство измерения расстояния по п.19, в котором источник сигнала по отдельности генерирует первый модулирующий сигнал, второй модулирующий сигнал, модулированный первым модулирующим сигналом, и несущую волну; или
источник сигнала имеет средство сохранения сигнала с двойной модуляцией, в котором заранее сохраняют сигнал с двойной модуляцией; или
источник сигнала имеет средство сохранения второго модулирующего сигнала, в котором заранее сохраняют второй модулирующий сигнал, и средство генерирования несущей волны, которое генерирует несущую волну.
21. Устройство измерения расстояния по п.19 или 20, в котором первый модулирующий сигнал представляет собой сигнал, который образует такую форму колебаний, которая ступенчато повышается или понижается в течение определенного первого периода; и второй модулирующий сигнал представляет собой сигнал, полученный в результате модуляции пилообразного колебания с более коротким периодом, чем первый период, модулированный первым модулирующим сигналом.
22. Способ измерения расстояния, с помощью которого измеряют расстояние до объекта измерения, содержащий этапы, на которых:
передают модулем передачи в качестве волнового колебания сигнал с двойной модуляцией, полученный в источнике сигнала в результате двойной частотной модуляции несущей волны с определенной частотой вторым модулирующим сигналом, заранее частотно-модулированным первым модулирующим сигналом;
детектируют смешанную волну, состоящую из бегущей волны, включающей в себя либо переданное модулем передачи волновое колебание, либо сигнал с двойной частотной модуляцией, полученный в источнике сигнала, и отраженной волны, в виде волнового колебания, переданного модулем передачи, отраженного от объекта измерения;
детектируют амплитудный компонент детектированной смешанной волны;
выбирают один определенный частотный компонент из амплитудных компонентов;
детектируют уровень сигнала выбранного частотного компонента; и
рассчитывают расстояние до объекта измерения по уровню сигнала.
| WO 2003104841 A1, 18.12.2003 | |||
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ДЛИНЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2228516C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2032915C1 |
| Устройство для контроля расстояния между рельсами пути | 1988 |
|
SU1641922A1 |
| МИКРОКРИОГЕННЫЙ ОХЛАДИТЕЛЬ | 1993 |
|
RU2079799C1 |
| US 5266956 A, 30.11.1993 | |||
| US 4829305 A, 09.05.1989 | |||
| JP 2004069693 A, 04.03.2004. | |||

