DS
N Ю
ю
ND
Изобретение относится к геодезическому приборостроению а именно к оптико-электронным устройствам, предназначенным для автоматизированного геодезического контроля расстояния между осями направляющих рельсов, в частности подкрановых путей.
Цель изобретения - расширение функциональных возможностей,
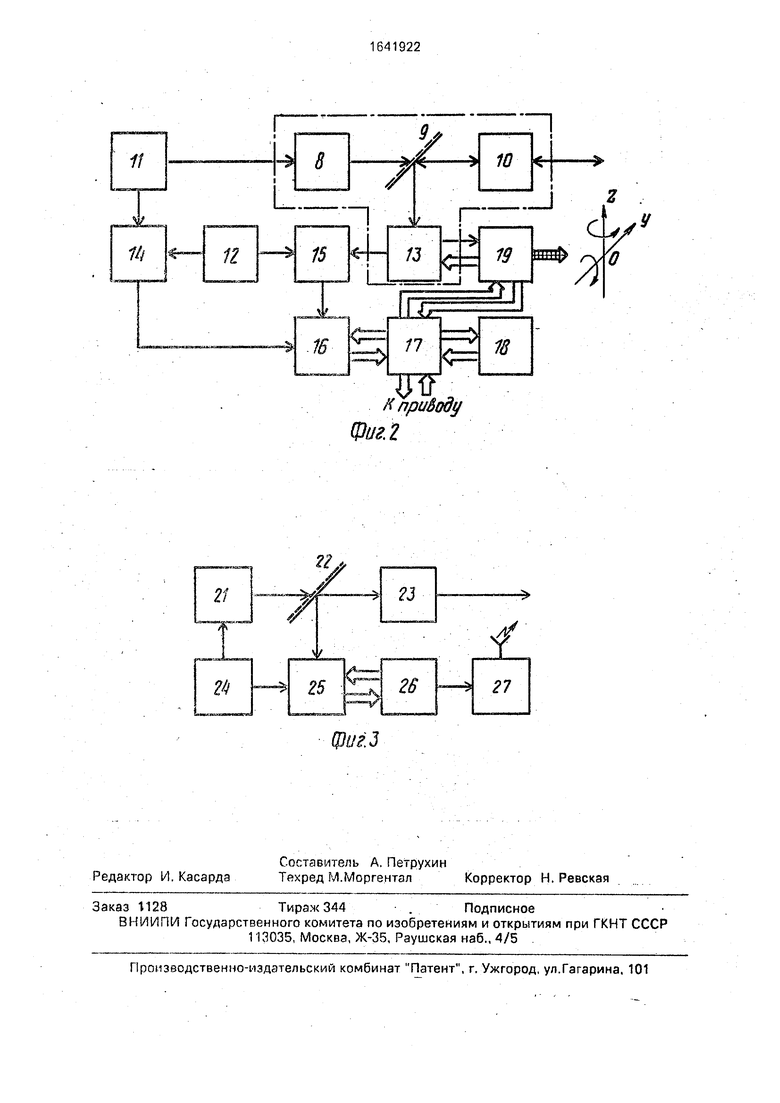
На фиг. 1 приведена схема контроля расстояния между осями рельсов контролируемого пути; на фиг. 2 - блок-схема светодальномера датчика расстояний; на фиг. 3 - блок-схема светодальномера датчика пути.
Устройство для контроля расстояния между осями рельсов содержит датчик 1 расстояний (фиг. 1), расположенный на приводных каретках 2 и 3, установленных на контролируемом рельсовом пути А, например, подкрановом, и датчики 5 и 6 пути.
Датчик 1 расстояний (фиг. 1 и 2) выполнен, например, в виде дифференциального фазового светодальномера 7, включающего источник 8 света, светоделитель 9 и коаксиальную приемо-передающую оптическую систему 10, расположенные по ходу луча, а также основной генератор 11, гетеродин 12, Фотоприемное устройство 13, смесители 14 и 15, цифровое фазометрическое устройство 16, микропроцессор 17, накопитель 18 данных и устройство 19 наведения. В комплект светодальномера 7 входит ретроотра- жатель 20,
Источник 8 света, в качестве которого использован, например, светодиод на ар- сениде галлия, оптически связан со светоделителем 9 и приемо-передающей оптической системой 10, а входом подключен к основному генератору 11 модулирующих колебаний. Светоделитель 9 выполнен, например, в виде полупрозрачного зеркала и служит для расщепления светового потока, идущего с дистанции, и направления его части на фотоприемное устройство 13. Коаксиальная приемо-передающая оптическая система 10 выполнена в виде линзовой или зеркально-линзовой телескопической системы. Основной генератор 11 и гетеро- дин 12 выполнены, например, на базе термостатированных кварцевых генераторов, имеющих различные (но близкие) частоты колебаний.
Фотоприемное устройств служит для преобразования падающего на него светового потока в электрические сигналы, Фотоприемное устройство 13 выполнено, например, на основе полупроводникового фотодиода и имеет в своем составе оптический фильтр (не показан), На фотоприемное
устройство 13 направляется световой поток, отраженный ретроотражателем 20, выполненным наборным и состоящим из нескольких трипель-призм. Выходы фотоприемного устройства 13 подключены к устройству 19 наведения и к одному из входов смесителя
15- нелинейному элементу, например, транзисторному усилителю, к второму входу которого подключен гетеродин 12. В состав
0 смесителя 15 входит также полосовой фильтр (не показан),
Смесители 14 и 15 аналогичны по конструкции и служат для смещения колебаний двух различных, но близких частот генера5 тора 11 и геродина 12 и выделения колебания разностной частоты. Выходами смесителя 14 и 15 подключены к цифровому фазометрическому устройству 16.
Цифровое фазометрическое устройст0 во 16 служит для измерения разности фаз между опорным и измерительным сигналами и представления ее в виде числа импуль-- сов. Цифровое фазометрическое устройство
16включает триггеры, электронный ключ, 5 генератор счетных импульсов, счетчик импульсов (не показаны) и связано шиной данных с микропроцессом 17.
Микропроцессор 17 служит для управления наведением датчика расстояний на
0 ретроотражатель 20, а точнее приемо-передающей части датчика 1 расстояний, в состав которой входят источник 8 света, светоделитель 9, приемо-передающая система 10 и фотоприемное устройство 11. Ис5 полнительным механизмом наведения является устройство 19. Микропроцессор 17 дает команду на проведение измерений, следит за возможными прерываниями луча в процессе измерений, контролирует внут0 рентою сходимость результатов измерений и величину постоянной поправки светодальномера. Микропроцессор 17 производит необходимые вычисления, управляет регистрацией результатов контроля. Для реше5 ния указанных задач микропроцессор 17 шинами управления и шинами данных связан с цифровым фазометрическим устройством 16, накопителем 18 данных, уст- .ройством 19 наведения, приводной
0 кареткой 2. Накопитель 18 данных выполнен на твердотельных запоминающих устройствах, например, ПЗС с возможностью передачи измерительной информации в ЭВМ, с целью дальнейшей вычислительной
5 обработки и регистрации.
Устройство 19 наведения служит для направления модулированного излучения света датчика 1 расстояний в центральную часть ретроотражателя 20. Для этого при- емо-излучающая часть светодальномера 7
выполнена с возможностью вращения в диапазоне ±5,5° относительно осей OY и OZ, Устройство 19 наведения подключено к одному из выходов фотоприемного устройства 13, а шинами управления и данных связано с фотоприемным устройством 13 и микропроцессором 17. Устройство 19 наведения включает измеритель фототока, потенцио- метрические устройства, сервоприводы и т.д. (не показаны).
Светодальномер 7 расположен на приводной каретке 2, установленной на одном из направляющих рельсов пути 4 с возможностью автономного перемещения и снабженной центрирующими устройствами фиксирования оси головки рельса. Привод каретки 2 включает, например, приемники каналов телеуправления движением кареток 2 и 3, передатчик канала телеуправления движением каретки 3 и сам привод, например электромеханический. Привод каретки 2 шинами управления и данных связан с микропроцессором 17. Ретроотража- тель 20 расположен на приводной каретке 3, установленной на другом из направляющих рельсов пути 4 с возможностью автономного перемещения. Каретка 3 также снабжена приводом и центрирующими устройствами фиксирования оси головки рельса. Привод каретки 3 включает, например; приемник канала телеуправления движением платформы 4 и электромеханический привод.
Датчики 5 и 6 пути выполнены на основе дифференциального фазового светодально- мера, но более низкой точности, например, в 100 раз, по сравнению с датчиком 1 расстояний I,Датчики 5 и 6 пути идентичны по,1 конструкции. Датчик пути, например, 5 (фиг. 1 и 3) включает источник 21 света, расположенные по ходу луча светоделитель 22 и коаксиальнуТЬ приемо-передающую оптическую систему 23. Кроме того, датчик 5 пути включает генератор 24 модулирующих колебаний, приемно-фазометрическое устройство 25, микропроцессор с накопителем 26 и передатчик 27 канала телеуправления движением приводной каретки 2.
В качестве источника 21 света используют, например, светодиод на арсениде галлия, на вход которого от генератора 24 подается модулирующее напряжение. Светоделитель 22 выполнен в виде полупрозрачного зеркала; приемо-передающая оптическая система 23 - в виде линзовой .или зеркально-линзовой телескопической системы; генератор 24 - в виде термостатированного кварцевого генератора, вторым из входов связанного с приемно-фазомет- рическим устройством 25.
Приемно-фазометрическое устройство 2ь служит для преобразования падающего на него светового потока в электрические сигналы и измерения разности фаз между
излучаемым и принимаемым световыми потоками. Устройство 25 включает, например, фотопрнемник (фотодиод), цифровое фазо- метрическое устройство, аналогичное по конструкции устройству 16. Шинами управ0 леяия и данных приемно-фазометрическое устройство 25 связано с микропроцессором 26.
Микропроцессор 26 служит для задания дискретности контроля межосевых расстоя5 иий рельсов, контроля постоянной поправки светодальномера, подачи команд на проведение контроля посредством передатчика 27 канала телеуправления движением подвижной платформы 2, для чего выход
0 микропроцессора 26 подключен к входу передатчика 27. Ретроотражатели 28 и 29 све- тодальномеров датчиков 5 и 6 пути расположены на приводных каретках 2 и 3 дальномерного устройства 1. Для установки
5 датчиков 5 и 6 пути на направляющих рельсах контролируемого пути 4 они снабжены наводящими и зажимными устройствами (не показаны).
Кроме того, датчики 5 и 6 пути могут
0 быгь выполнены в виде колесных датчиков пути однотипных конструкций. Колесный датчик пути, например, 5, включает измерительное колесо, формирователь меток дальности и расположен на приводной каретке
5 2. Выход формирователя меток дальности подключен к приводу каретки 2. В случае выполнения датчиков 5 и 6 пути в виде колесных датчиков пути привод каретки 3 с ретроотражателем снабжают передатчиком
0 канала телеуправления, связанного с приводом каретки 2 светодзльномера 7 датчика 1 расстояний. Колесный датчик пути проще по конструкции по сравнению со светодаль- номером, но имеет более низкую точность
5 измерений пройденного пути, которая в ряде случаев может быть недостаточной.
Устройство для контроля расстояния между осями рельсов работает следующим образом.
0В начале контролируемого, например,
подкранового пути 4, устанавливают на рельсах датчики 5 и 6 пути. В конце пути - приводные каретки 2 и 3 со светодальноме- ром 7 и ретроотражателем 20 соответствен5 но. Производят ориентирование датчиков 5 и 6 пути примерно на центры ретроотража- телей 28 и 29, используя для этого наводящие устройства.
Подготавливают к работе датчики 5 и 6 пути. На панелях управления светодальномерой дпгчиков 5 и 6 пуги задают интервал контроля расстояний между осями направляющих рельсов пути, например, в метрах. После этого дают команду начала процесса контроля, т.е. включают датчики 5 и 6 пути. Работа датчиков 5 и 6 идентична. По команде начала контроля датчиков 5 и 6 пути измеряются исходные разности фаз излучаемых и принимаемых масштабных колебаний. Источник 21 света, например, датчика 5 пути, излучает модулированный по амплитуде световой поток вида
Ф Ф0 + Фм COS ( СО Г -f p0 ),
где со о - немодулированный световой поток;
Фм - глубина модуляции светового потока;
а г -ь I/AJ фаг,:; излучаемого модулированного соегоеого потока;
ш- 2л Г- - круговая частота модуляции (F - частота м- ду. яшш).
Модуляцию светодисда 2 потоку питания осуществляет генератор 24 модулирующих колебаний задающий с высокой стабильностью ы-тсштабпую частоту модуляции, (.апример, 5 мГц.
Соеторой поток проходит через спато- делитоль 22. коллиммруется приемно-пере- дающеп оптической системой 23, уходит на дистанцию, отражается ретроотражате- лем 28, установленным на подвижной платформе 2, о обратном направлении, проходит оптическую систему 23, преломляется светоделителем 22 и направляется на фотоприемник приемно-фазочетриче- ского устройства 25. Пройди расстояние 2D до отражателя 28 и обрат но, световой поток поступает на Фотопрмемнмк с фазой масштабных колебаний
& ( t + Г 20 ) + фо
где т 20 время распространения излучения вдоль дистанции а прямом и обратном направлениях.
Световой поток преобразуется фотодиодом в электрический ток, поступающий на вход цифрового Фазометрического устройства прмемно-Фазометримеского устройства 25. Па второй вход цифрового фазометрического устройства поступают электрические колебания от генератора 24. Цифровое фазометрическое устройство измеряет разность фаз излучаемого и принимаемого масштабных колебаний
Af 9% - / w t 20 ш П Тсч ,.
где п - число подсчитанных счетчиком цифрового фазометрического устройства импульсов:
Тсч - период следования счетных импульсов.
Микропроцессор 26 вычисляет по приведенной формуле исходную разность фаз излучаемого и принимаемого масштабных колебаний, которая затем запоминается накопителем.
Заданный интервал контроля расстояния между осями рельсов пересчитывается микропроцессором 26 датчика 5 пути в количество целых уложений половины длины
волны масштабных колебаний и домер. дробную часть, меньшую единицы
AL -у (N + AN).
где AL - заданный интервал контроля расстояния между осями рельсов;
N - число целых уложений половины длины волны масштабных колебаний;
- домер в импульсах.
Значение заданного интервала контроля также запоминается накопителем.
После того, как измеряют исходную разность фаз, микропроцессор 26 дает команду на приведение в движение привод- ной каретки 2. Сигнал от микропроцессора
26поступает на вход передатчика 27 канала телеуправления движением приводной каретки 2 и излучается в эфир. Затем сигнал управления движением принимается приемпиком приводной каретки 2 и она приходит в движение.
Датчик 5 пути измеряет пройденный кареткой 2 путь и постоянно сравнивает его с заданным значением интервала контроля
расстояний между осями рельсов. При движении каретки 2 разность фаз излучаемого и принимаемого масштабных колебаний периодически изменяется от 0 до п, измеряется цифровым фазометрическим устройством, фиксируется микропроцессором 26 и с учетом домера сравнивается с заданным значением дискретности контроля. Когда пройденный кареткой 2 путь достигает заданного значения интервала контроля, микропроцессор дает команду на остановку каретки 2. Сигнал излучается передатчиком
27в эфир, принимается приемником привода каретки 2 и она останавливается. На микропроцессор 17 от привода каретки 2
поступает сигнал остановки платформы.
Одновременно с кареткой 2 дают команду на приведение в движение приводной каретки 3. По достижению пройденного приводной кареткой 3 пути заданного значения интервала контроля микропроцессор датчика 6 пути подает команду остановки каретки 3. Сигнал остановки излучается в эфир и принимается приемником привода каретки 3 и приемником канала телеуправления движением каретки 3 привода каретки 2. Каретка 3 останавливается, а ее микропроцессор 17 дальномерного устройства 1 от привода каретки 2 поступает сигнал остановки каретки 3. Приводные каретки 2 и 3 установлены над точками контроля расстояния между осями рельсов. После прихода на микропроцессор 17 обоих сигналов остановки кареток 2 и 3, микропроцессор 17 приводит в работу устройство 19 наведения.
Устройство 19 наведения, управляемое микропроцессором 17, сканирует по заданной программе в диапазоне ±2,5° , область пространства в направлении на ретроотрэ- жатель 20. Моменты, когда на фотоприемное устройство 13 попадает и исчезает световой поток, либо максимальные значения фототоков, фиксируются и являются управляющими для производства измерений потенциометрами.
Сигналы с потенциометров поступают в микропроцессор 17 и запоминаются накопителем 18 данных. Микропроцессор 17 по измеренным потенциометрами значениям определяет положение центра ретро- отражателя 20, после чего дает команду устройству 19 наведения, по которой приемо- излучагощее устройство светодальномера 7 сервоприводами направляется на центр ре- троотражат.еля 20,
По окончании операции наведения светодальномера 7 датчика 1 расстояний, микропроцессор 17 дает команду на проведение измерений расстояний между осями направляющих рельсов на i-й точке контроля и вычисляет растояние между осями рельсов по формуле
D
(N+lЈf
где Я - длина волны масштабных колебаний;
N - целое число уложений полуволн, определяемое из априорной информации (на практике расстояние между осями рельсов известно с точностью, достаточной для определения N).
Расстояние между осями рельсов из-- меряется, например, 100 раз. Микропроцессор 17 контролирует внутреннюю сходимость результатов измерений, вычисляет среднее значение расстояния, контролирует величину постоянной поправки на возможный фазовый сдвиг масштабных колебаний за время измерений посредством включения линии оптического короткого замыкания, вычисляет окончательное значение измеренного расстояния между осями рельсов на 1-й точке контроля, которое затем запоминается накопителем 18 данных. Аналогично выполняются измерения на остальных точках контроля.
Микропроцессор 17 дает сигнал приводу каретки 2 об окончании измерений на 1-й точке контроля. Передатчиком канала телеуправления движением каретки 3, привода
каретки 2 сигнал излучается в эфир. Каретка 2 приходит в движение. Сигнал принимается приемником телеуправления движением каретки 3 привода и каретка 3 приходит в движение. Далее операции повторяются.
Формула изобретения
1.Устройство для контроля расстояния между рельсами пути, содержащее перемещаемый вдоль пути фотодатчик расстояний,
отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено двумя датчиками пути, каждый из которых выполнен в виде светодальномера, установленного в начале
контролируемого участка пути, и ретроотра- жателя, при этом светодальномер датчика расстояний смонтирован на первой приводной каретке, установленной на одном из рельсов пути, а его ретроотражатель смонтирован на второй приводной каретке, установленной на другом рельсе пути, причем ретроотражатели датчиков пути смонтированы на соответствующих каретках, приводы которых и светодальномеры датчиков
пути, а также светодальномер датчика расстояний и его ретроотражатель связаны между собой каналами телеуправления движением.
2,Устройство по п. 1, отличающее- с я тем, что светодальномер датчика расстояний снабжен устройством наведения, привод которого шинами управления подключен к фотоприемнику и микропроцессору.
ir
к приводу Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
Изобретение относится к геодезическому приборостроению, а именно к оптико-электронным устройствам, предназначенным для автоматизированного геодезического контроля расстояния между осями направляющих рельсов. Целью изобретения является расширение функциональных возможностей. Устройство содержит датчики расстояний 1 и пути 5, 6, выполненные в виде светодальномеров. Датчик 1 расстояний, его ретроотражатель 20, а также ретро- отражатели 28 и 29 датчиков 5 и 6 пути расположены на приводных каретках 2 и 3, автономно установленных на рельсах 4, Расстояние между осями рельсов измеряется многократно. Микропроцессор контролирует внутреннюю сходимость результатов измерений, вычисляет среднее значение расстояния, контролирует величину постоянной поправки за возможный фазовый сдвиг масштабных колебаний за время измерений, вычисляет окончательное значение измеренного расстояния между осями рельсов на i-й точке контроля, которое затем запоминается накопителем. Аналогично выполняются измерения на остальных точках контроля. 1 з.п, ф-лы, 3 ил. (Л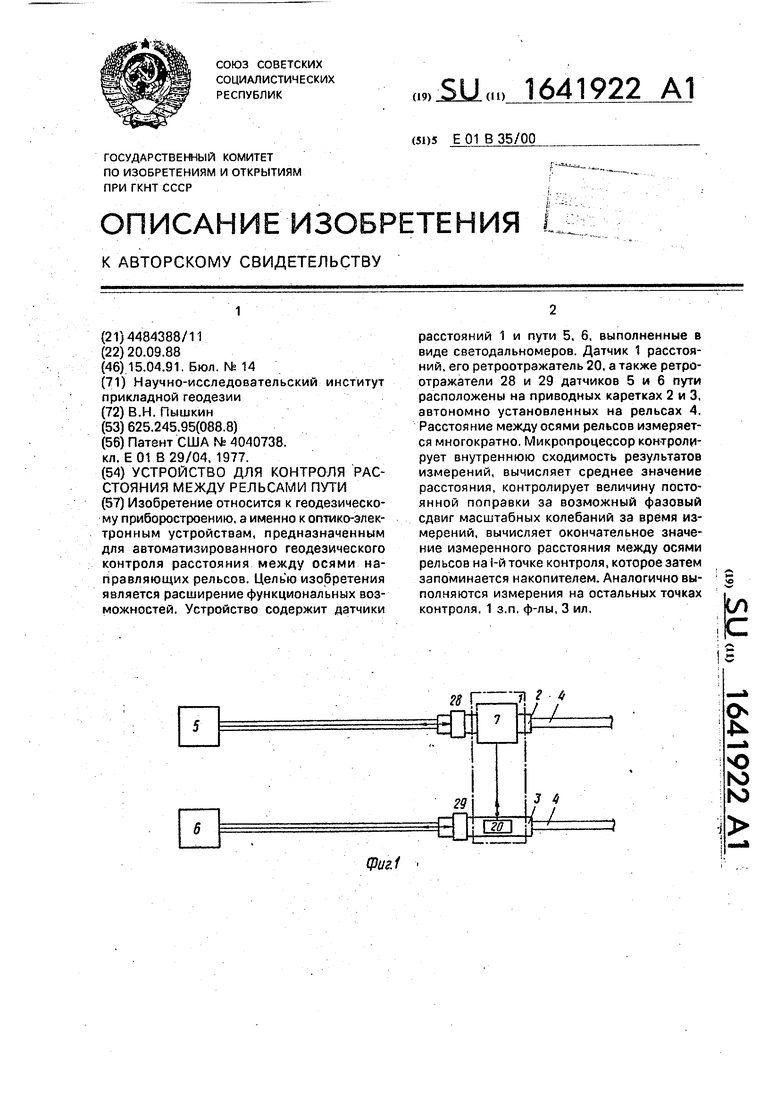
| Патент США № 4040738 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
