Изобретение относится к радиотехнике и может быть использовано при проектировании радиолокационных навигационных систем с повышенными требованиями к точности измерения расстояния между РЛС и радиоконтрастными объектами (ориентирами) с известными координатами.
Одним из близких по технической сущности к предлагаемому техническому решению является способ измерения дальности, рассмотренный в кн. Я.Д.Ширмана Теоретические основы радиолокации. М. Сов. Радио, 1970, с.361-364 и в кн. М. И. Финкельштейна Основы радиолокации. М. Сов. Радио, 1973, с. 92-94, основанный на излучении непрерывных колебаний СВЧ на двух несущих частотах, приеме отраженных колебаний независимыми приемными каналами, выделении и узкополосной фильтрации допплеровских частот в каждом из приемных каналов, образовании разности фаз ϕ напряжений допплеровских частот на выходах приемных каналов и вычислении дальности до цели R(t) из соотношения
ϕ  R(t)
R(t)
(1) где Fp разность допплеровских частот в приемных каналах, С скорость света.
Недостатком этого способа измерения дальности является, во-первых, отсутствие разрешающей способности по дальности, во-вторых, способ нуждается в движении РЛС относительно ориентиров и не может работать при неподвижных ориентирах, в-третьих, для того, чтобы измерение дальности было однозначным, разностную частоту приходится выбирать из условия
Fp≅ 
(2) где Rmax максимальная дальность, а это, в свою очередь, при больших значениях Rmax приводит к невысокой точности измерения дальности, которая, как это следует из (1), (2), при заданной инструментальной ошибке измерения фазы δ ϕ определяется соотношением для ошибки измерения дальности вида
δR ≥  Rmax
Rmax
(3)
Наиболее близким к предлагаемому способу по своей технической сущности является известный способ, сущность которого заключается в излучении зондирующих импульсов с высокочастотным заполнением, приеме отраженных импульсных сигналов, выделении их амплитудной огибающей после согласованной фильтрации, измерении задержки максимального значения огибающей относительно момента излучения зондирующего импульса в том же периоде повторения. При измерении дальности способом-прототипом обеспечивается высокая разрешающая способность по дальности и возможно однозначное измерение дальности как до движущихся, так и до неподвижных целей.
Недостатком способа-прототипа является недостаточная точность измерения дальности, в особенности, для решения геодезических и навигационных задач.
Действительно, среднеквадратичная ошибка измерения дальности в случае прямоугольных зондирующих импульсов с длительностью τи при одиночном измерении определяется выражением
σo= 
(4) где E/No отношение энергии импульса Е к спектральной плотности шумов No. Как видно из выражения (4), при сτи /2 15 м, ρ  10 σo 3,3 м, что означает недостаточную точность для решения ряда специфических задач, в частности, задачи точной навигации или геодезии.
10 σo 3,3 м, что означает недостаточную точность для решения ряда специфических задач, в частности, задачи точной навигации или геодезии.
Недостаток прототипа устранен в предлагаемом способе, который состоит в том, что в способе, включающем излучение когерентных зондирующих импульсов, прием отраженных сигналов, фазовое детектирование их в квадратурных каналах, согласованную фильтрацию, выделение амплитудной огибающей, измерение задержки максимума огибающей относительно момента окончания излучения зондирующего импульса в том же периоде повторения и определение дальности до объекта по известной зависимости, перестраивают несущую частоту зондирующих сигналов и частоту гетеродинных колебаний синхронно и синфазно от периода к периоду по регулярному закону попеременно на одно из l ≥ 2 фиксированных значений так, чтобы хотя бы две частоты fg, fh отличались друг от друга на величину
Δfo=  fg-f
fg-f ≅
≅  g, h ∈
g, h ∈  где Δo /2 максимальная ошибка в определении дальности по времени задержки между максимумом амплитудной огибающей и концом зондирующего импульса, задерживают принимаемые сигналы в обоих квадратурных каналах и сигналы амплитудной огибающей на время h-g периодов повторения зондирующих импульсов, формируют сигнал, пропорциональный произведению максимальных значений амплитудных огибающих задержанного и незадержанного сигналов, формируют сигналы, пропорциональные произведению задержанных и незадержанных сигналов одноименных квадратур, а также сигналы, пропорциональные произведению задержанных и незадержанных сигналов разноименных квадратур, сигналы с одноименных квадратур суммируют друг с другом, а сигналы с разноименных квадратур вычитают друг из друга, нормируют получившиеся сигналы суммы и разности к сигналу, пропорциональному произведению максимальных значений амплитудных огибающих задержанного и незадержанного сигналов, по полученным таким образом сигналам, пропорциональным значениям косинуса и синуса фазы ϕo соответственно, определяют известным образом ее главное значение в интервале углов (0,2 π) и вычисляют дальность до цели по формуле
где Δo /2 максимальная ошибка в определении дальности по времени задержки между максимумом амплитудной огибающей и концом зондирующего импульса, задерживают принимаемые сигналы в обоих квадратурных каналах и сигналы амплитудной огибающей на время h-g периодов повторения зондирующих импульсов, формируют сигнал, пропорциональный произведению максимальных значений амплитудных огибающих задержанного и незадержанного сигналов, формируют сигналы, пропорциональные произведению задержанных и незадержанных сигналов одноименных квадратур, а также сигналы, пропорциональные произведению задержанных и незадержанных сигналов разноименных квадратур, сигналы с одноименных квадратур суммируют друг с другом, а сигналы с разноименных квадратур вычитают друг из друга, нормируют получившиеся сигналы суммы и разности к сигналу, пропорциональному произведению максимальных значений амплитудных огибающих задержанного и незадержанного сигналов, по полученным таким образом сигналам, пропорциональным значениям косинуса и синуса фазы ϕo соответственно, определяют известным образом ее главное значение в интервале углов (0,2 π) и вычисляют дальность до цели по формуле
R1=  mo+
mo+  где mo=
где mo= 




причем E(Uo) означает целую часть, Д(Uo) дробную часть от Uo.
С целью повышения точности при числе частот l > 2 организуют итеративный процесс, при котором повторяют вышеуказанные операции, выбирая частоты перестройки fgi, fhi так, чтобы
Δfi= fgi-fhi≅  gi,hi∈
gi,hi∈  где Δi/2 величина максимальной ошибки измерения Ri, при этом дальность вычисляют по формуле
где Δi/2 величина максимальной ошибки измерения Ri, при этом дальность вычисляют по формуле
Ri+1=  mi+
mi+  где mi=
где mi= 
 1
1
Ui=  fi-
fi- 
Благодаря осуществлению совокупности указанных выше операций обеспечивается комплексирование результатов двух независимых измерений дальности, первого по величине задержки между максимумом огибающей и концом зондирующего импульса, которое является однозначным, но сравнительно неточным, и второго по сдвигу фаз между колебаниями зондирующих и отраженных сигналов, которое является точным, но неоднозначным, причем для увеличения интервала однозначного измерения до значения, превосходящего максимальную ошибку грубого измерения, используются фазовые измерения на двух частотах, излучаемых попеременно, и определяeтся сдвиг фаз, соответствующий разностной частоте, равной разности излучаемых несущих частот. Значение дальности до объекта (ориентира) с точностью до интервала однозначного измерения, равного половине длины волны разностной частоты, определяется путем сравнения показаний измерителя по задержке (дальномера) с фазовым измерителем, при этом показания последнего используются для уточнения измерения дальности с точностью до долей интервала однозначного измерения.
Таким образом, благодаря комплексированию этих измерений получают точный и однозначный результат.
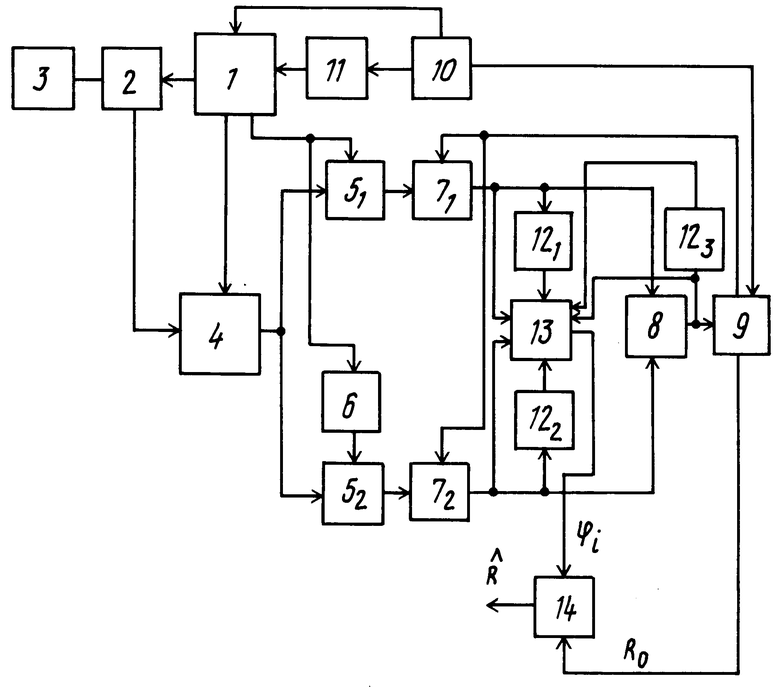
На чертеже изображена функциональная схема РЛС, реализующая предлагаемый способ.
Приняты следующие обозначения: 1 передающее устройство (Пер.У); 2 антенный переключатель (АП); 3 антенна (А); 4 приемное устройство (Пр.У); 5 фазовые детекторы (ФД); 6 фазовращатель на 90о (ФВ); 7 согласованные фильтры (СФ); 8 блок выделения огибающей (БВО); 9 дальномер (Д); 10 синхронизатор (С); 11 блок перестройки частоты (БПЧ); 12 линии задержки на (h-g) периодов повторения (ЛЗ); 13 измеритель фазы разностной частоты (ИФ); 14 блок комплексирования (БК).
В соответствии с представленной схемой РЛС, реализующая предлагаемый способ, работает следующим образом.
Передающее устройство (Пер.У) 1 излучает когерентные зондирующие импульсы с перестройкой частоты по регулярному закону на одну из фиксированных частот fci, i g, h, причем Δfo= fh-fg≅  где Δo /2 максимальная ошибка измерения дальности Ro по задержке амплитудной огибающей принимаемого импульса относительно конца зондирующего импульса в том же периоде повторения. Проходя антенный переключатель (АП) 2, эти импульсы излучаются антенной (А) 3 в пространство.
где Δo /2 максимальная ошибка измерения дальности Ro по задержке амплитудной огибающей принимаемого импульса относительно конца зондирующего импульса в том же периоде повторения. Проходя антенный переключатель (АП) 2, эти импульсы излучаются антенной (А) 3 в пространство.
Отраженные от целей сигналы
Ui(t) aia t
t  cos
cos t
t  +
+ , i=g,h где a(t)
, i=g,h где a(t) 





причем τи длительность импульса, проходя А 3 и АП 2, попадают в приемное устройство (Пр. У), в котором они преобразуются по частоте на промежуточную частоту fпч и усиливаются, после чего попадают на входы фазовых детекторов ФД 51, 52, на другие входы которых в качестве колебаний опорной частоты приходят непрерывные колебания, формируемые в Пер.У 1, причем на ФД 52 поступают колебания
Uпч(t) aп4cos t+ϕпчt+ϕпч-
t+ϕпчt+ϕпч-  со сдвигом фаз на 90о, образующимся благодаря фазовращателю (ФВ) 6. После фильтрации в согласованных фильтрах СФ 71, 72 квадратурные составляющие видеосигналов, которые выражаются в виде (неизвестные начальные фазы излучаемых сигналов ϕci и гетеродинных колебаний ϕгiкомпенсируются благодаря когерентному построению РЛС, так как ϕп4=
со сдвигом фаз на 90о, образующимся благодаря фазовращателю (ФВ) 6. После фильтрации в согласованных фильтрах СФ 71, 72 квадратурные составляющие видеосигналов, которые выражаются в виде (неизвестные начальные фазы излучаемых сигналов ϕci и гетеродинных колебаний ϕгiкомпенсируются благодаря когерентному построению РЛС, так как ϕп4=  -
-
Uic(t) aia t
t  cos
cos
Uis(t) aia t
t  sin
sin
(1)
i g, h, квадрируются, суммируются и преобразуются (нелинейное преобразование извлечение квадратного корня) в блоке выделения огибающей (БВО) 8, так что из них формируются положительные видеоимпульсы
Ui(t) aia t
t  , i g,h которые приходят на вход дальномера Д9. Д9 измеряет дальность до объекта (ориентира) и одновременно стробирует СФ 71, 72. На выходах СФ в стробах выделяются квадратурные составляющие сигналов разнополярные видеоимпульсы, величины и знаки которых определяются выражениями
, i g,h которые приходят на вход дальномера Д9. Д9 измеряет дальность до объекта (ориентира) и одновременно стробирует СФ 71, 72. На выходах СФ в стробах выделяются квадратурные составляющие сигналов разнополярные видеоимпульсы, величины и знаки которых определяются выражениями
Uic= aicos
(2)
Uis= aisin i g,h причем сигналы Ugc, Uhc (и, соответственно, Ugs, Uhs) появляются через h-g периодов повторения.
i g,h причем сигналы Ugc, Uhc (и, соответственно, Ugs, Uhs) появляются через h-g периодов повторения.
При этом предполагается, что объекты (ориентиры) неподвижны относительно РЛС и представляют собой точечные цели одиночные (например, уголковые) отражатели.
После попарного перемножения и суммирования задержанных в ЛЗ 121, 122 на h-g периодов повторения и незадержанных одноименных квадратурных составляющих образуется сигнал с величиной и полярностью в соответствии с выражением
bc UgcUhc + UgsUhs,
т.е.
bc= aga cos
cos cos
cos + sin
+ sin sin
sin
или bc= agahcos (ωg-ωh)
(ωg-ωh)
(3) Аналогично, после попарного перемножения и вычитания задержанных в ЛЗ 121, 122 на h-g периодов повторения и незадержанных разноименных квадратурных составляющих образуется импульсный сигнал с величиной и полярностью, определяемыми выражениями
bs UgsUhs-UgcUhs,
т.е.
bs= aga sin
sin cos
cos + cos
+ cos sin
sin
или
bs= agahsin (ωg-ωh)
(ωg-ωh)
(4) Импульсный сигнал ag из БВО 8 задерживается в ЛЗ 123 на h-g периодов повторения и поступает в измеритель фазы разностной частоты (ИФ) 13, куда приходит в тот же момент сигнал ah, одновременно в ИФ 13 формируются сигналы bs, bc. В ИФ 13 образуются нормированные сигналы  и
и  а затем определяется фаза ϕo например, по правилу
а затем определяется фаза ϕo например, по правилу




(5) Значение ϕo из ИФ 13 поступает в блок комплексирования БК 14, куда из дальномера одновременно приходит значение дальности Ro. В БК 14 вычисляется уточненное значение дальности по правилу
R1=  mo+
mo+  где mo=
где mo= 


(6)
причем Uo=  fo-
fo-  E(Uo) означает целую часть от Uo, Д(Uo) дробную часть от Uo.
E(Uo) означает целую часть от Uo, Д(Uo) дробную часть от Uo.
При необходимости возможно дальнейшее уточнение дальности до объекта (ориентира) путем организации итеративного процесса, для этого при l > 2 (число частот перестройки) повторяют вышеуказанные операции, выбирая пару частот перестройки fgi, fhi так, чтобы
Δfi= fgi-fhi≅  (
( h
h
(7) где Δi /2 величина максимальной ошибки измерения Ri, при этом дальность вычисляют по формуле
Ri+1=  mi+
mi+ 
(8) где mi= 


причем
Ui=  fi-
fi- 
Техническим преимуществом заявляемого способа по сравнению с прототипом является существенное повышение точности измерения дальности.
Ошибка измерения дальности заявляемым способом может быть оценена путем анализа соотношений (4)-(8). Она выражается в виде
σi+1=  ·
· 
(9)
причем Δfi определяется из (7).
Так, например, при ρ 10, σo 3,3 м получим Δo 6 σo 20 м Δ fo 7,5 мГц и σ1= 1 м.
Далее, Δ1 6 м, Δf1 23 мГц и σ2 30 см и т.д.
Таким образом, предлагаемый способ при наличии перестройки частоты на три значения (l 3), разнесенные на 7,5 мГц и 23 мГц, позволяет повысить точность измерения дальности по крайней мере на порядок.
Экономических преимуществ не ожидается, так как внедрение предлагаемого способа в аппаратуру не приведет к снижению стоимости ее изготовления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| АВТОМАТИЧЕСКАЯ СТАНЦИЯ ОТВЕТНЫХ ПОМЕХ | 1994 |
|
RU2103705C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
Использование: при проектировании радиолакационных навигационных систем. Сущность изобретения: комплексирование результатов двух независимых измерений дальности - первого по величине задержки между максимумом огибающей и концом зондирующего импульса, и второго - по сдвигу фаз между колебаниями зондирующих и отраженных сигналов, причем для увеличения интервала однозначного измерения до значения, превосходящего максимальную ошибку грубого измерения, учитываются фазовые измерения на двух частотах, излучаемых попеременно, и определяется сдвиг фаз, соответствующий разностной частоте, что позволяет увеличить точность измерения дальности. 1 ил.
СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ, заключающийся в том, что излучают когерентные зондирующие импульсные сигналы, принимают отраженные импульсные сигналы, преобразуют принятые сигналы в сигнал промежуточной частоты, усиливают, выделяют квадратурные составляющие принимаемого сигнала Uic, Uis путем фазового детектирования и согласованной фильтрации, выделяют амплитудную огибающую сигнала  измеряют задержку максимального значения амплитудной огибающей принимаемого сигнала относительно момента окончания зондирующего импульсного сигнала в том же периоде повторения, определяют дальность до объекта, отличающийся тем, что частоту зондирующих импульсных сигналов и частоту гетеродинных колебаний изменяют синхронно и синфазно от периода к периоду на одно из монотонно возрастающих (или монотонно убывающх) фиксированных значений
измеряют задержку максимального значения амплитудной огибающей принимаемого сигнала относительно момента окончания зондирующего импульсного сигнала в том же периоде повторения, определяют дальность до объекта, отличающийся тем, что частоту зондирующих импульсных сигналов и частоту гетеродинных колебаний изменяют синхронно и синфазно от периода к периоду на одно из монотонно возрастающих (или монотонно убывающх) фиксированных значений
f1 < f2 < f3 < fl или f1 > f2 > f3 > fl
так, чтобы

где c скорость света;
δo расчетное значение максимальной ошибки измерения дальности по времени задержки максимального значения амплитудной огибающей принимаемого сигнала после согласования фильтрации относительно момента окончания зондирующего импульсного сигнала в том же периоде повторения;
где r отношение сигнал/шум по мощности,
задерживают квадратурные составляющие принимаемого сигнала Uic · Uis и амплитудную огибающую принимаемого сигнала на период повторения зондирующих сигналов, формируют сигнал ai · ai-1, пропорциональный произведению значений амплитудных огибающих незадержанного ai и задержанного ai-1 принятых сигналов, одновременно формируют сигналы, пропорциональные произведениям Uic·Ui-1,c Uis·Ui-1,s незадержанных и задержанных сигналов одноименных квадратурных составляющих, а также сигналы, пропорциональные произведениям Uis·Ui-1,c Uic·Ui-1,s незадержанных и задержанных сигналов разноименных квадратурных составляющих, где Uic; Ui_s незадержанные квадратурные составляющие принимаемого сигнала; Ui-1,c; Ui-1,s задержанные на период повторения квадратурные составляющие принимаемого сигнала, сигналы произведений одноименных квадратурных составляющих суммируют друг с другом, формируют сигнал суммы bic= Uic·Ui-1,c+Uis·Ui-1,s, сигналы произведения разноименных квадратурных составляющих вычитают друг из друга, формируют сигнал разности bis= Uis·Ui-1,c-Uic·Ui-1,s, нормируют сигнал суммы bic и сигнал разности bis к сигналу ai · ai-1;
определяют фазу сигнала ϕi разностной частоты и вычисляют дальность до цели:
где
причем i 1,2,l-1;
i 1,2,l-1;
E (Ui) целая часть Ui;
D (Ui) дробная часть Ui;
C скорость света.
| Филькенштейн М.И | |||
| Основы радиолокации, М.: Сов.радио, 1973, с.16. |
