В целом настоящее изобретение относится к подвижной системе получения снимков, в частности, при помощи рентгеновских лучей, и в частности, к регулированию положения подвижной рентгеноустановки. Оно находит применение, в частности, в области стоматологической цифровой рентгенологии.
Как показано на фиг.1, подвижная рентгеноустановка для получения снимков, например стоматологическая цифровая рентгеноустановка, содержит источник 10 излучения (например, рентгеновского излучения), датчик 20 изображения и блок 30 управления. Датчик 20 может содержать цифровой видеодетектор 21 типа CCD (ПЗС) (от английского "Charge Coupled Device" (прибор с зарядовой связью)), связанный со сцинтиллятором 22. Детектор 21 является чувствительным к фотонам с длиной волны в видимой области. Сцинтиллятор 22 выполняет роль преобразователя длины волны, принимая рентгеновские лучи на входе и выдавая фотоны видимого света на выходе. Блок 30 управления соединен с датчиком 20 для управления работой установки.
Во время работы между источником 10 и датчиком 20 помещают объект 40 исследования. В представленном примере применения объект 40 содержит элементы, характеризующиеся определенной непроницаемостью для рентгеновских лучей, такие как зуб 41 пациента, и элементы, прозрачные или слабо непроницаемые для рентгеновских лучей, такие как щека 42 пациента. Изображение, получаемое на цифровом датчике 20, содержит изображение мишени, то есть зуба 41.
В случае подвижной установки, такой как стоматологическая рентгеноустановка, источник 10 рентгеновских лучей и цифровой датчик 20 не являются неподвижно соединенными друг с другом. Действительно, датчик 20 предназначен для размещения во рту пациента напротив зуба-мишени, и пользователь (как правило, врач-стоматолог или его ассистент) должен держать источник 10 перед чувствительной поверхностью датчика 20 и находить правильное положение источника 10 по отношению к датчику 20, при котором исследуемый зуб находится между источником и датчиком.
Для решения этой проблемы было предложено механическое устройство, называемое ангулятором.
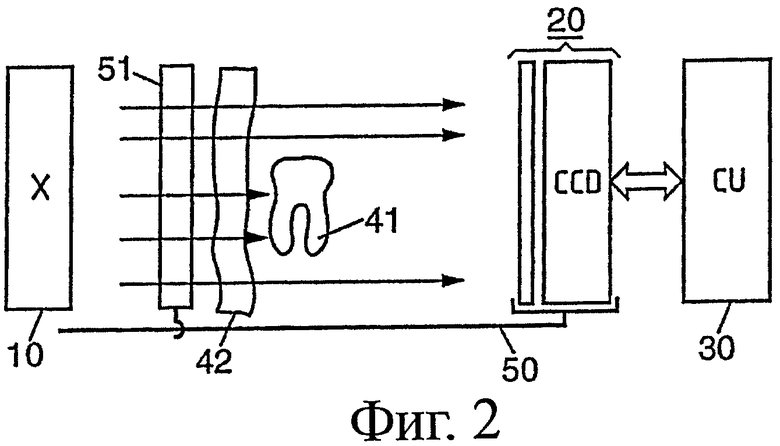
Как показано на фиг.2, ангулятор 50 содержит стержень-держатель датчика 20, вдоль которого может скользить шайба 51. Во время работы датчик 20 вводят в рот пациента со стороны, противоположной внутренней стороне щеки пациента, и шайбу 51 прижимают к наружной стороне щеки пациента. После этого пользователь перемещает источник 10 рентгеновских лучей к шайбе 51, что позволяет лучше позиционировать источник рентгеновских лучей перед датчиком, а также лучше выравнивать направление рентгеновских лучей вдоль оси, перпендикулярной к чувствительной поверхности датчика 20.
Однако использование такого ангулятора занимает много времени и является трудоемким. Кроме того, элементы крепления датчика на ангуляторе проявляются на снимке, поэтому их использование не всегда является возможным.
Чтобы устранить эти недостатки, настоящим изобретением в качестве первого объекта предлагается устройство детектирования погрешности позиционирования между первым элементом и вторым элементом, которое содержит:
- блок излучения электромагнитных волн, выполненный с возможностью излучения электромагнитных волн, подходящих для прохождения через ткани тела, при этом указанный блок излучения выполнен с возможностью присоединения к первому элементу;
- блок приема электромагнитных волн, предназначенный для приема электромагнитных волн и цифровой обработки, причем указанный блок выполнен с возможностью присоединения ко второму элементу и с возможностью взаимодействия с блоком излучения электромагнитных волн для детектирования погрешности позиционирования первого элемента относительно второго элемента,
- при этом блок излучения электромагнитных волн содержит N электромагнитных излучателей, расположенных, по существу, в одной плоскости, где N - число большее или равное 3, и блок управления, выполненный с возможностью подачи для каждого из N электромагнитных излучателей соответствующего электромагнитного сигнала, причем указанный электромагнитный сигнал соответствует направленному электромагнитному полю, модулируемому по растру с двоичным представлением, определенным для каждого электромагнитного излучателя, и позволяет блоку приема электромагнитных волн идентифицировать путем обработки сигналов электромагнитные сигналы, поступающие соответственно от каждого из электромагнитных излучателей.
Предпочтительно такое устройство может быть адаптировано для существующей подвижной рентгеноустановки. В этом случае первый элемент является источником излучения, а второй элемент - датчиком изображения. Вместе с тем применение устройства не ограничивается этим примером, и устройство можно использовать для обеспечения позиционирования любых типов элементов.
Под выражением «подходящих для прохождения через ткани тела», относящимся к электромагнитным волнам, следует понимать, разумеется, что эти волны не являются вредными для здоровья пациента. Такими электромагнитными волнами являются, например, радиоволны (создаваемые электрическими токами высокой частоты) соответствующей мощности. Например, частота электромагнитных волн может иметь значение, меньшее 100 МГц, и, в частности, находится в диапазоне [10МГц - 100 МГц].
Вторым объектом настоящего изобретения является подвижная установка для получения изображения, содержащая:
- источник излучения,
- датчик изображения, содержащий поверхность, чувствительную к излучению, генерируемому источником излучения, и не присоединенный к источнику излучения.
Кроме того, установка содержит устройство детектирования погрешности позиционирования, являющееся первым объектом изобретения, в котором:
- блок излучения электромагнитных волн присоединен к источнику излучения; и
- блок приема электромагнитных волн присоединен к датчику изображения.
Третьим объектом настоящего изобретения является подвижная установка для получения изображения вышеуказанного типа, но содержащая устройство детектирования погрешности позиционирования, являющееся первым объектом изобретения, в котором:
- блок излучения электромагнитных волн присоединен к датчику изображения; а
- блок приема электромагнитных волн присоединен к источнику излучения.
Индикация погрешности позиционирования может осуществляться для пользователя любым соответствующим способом. В этом случае пользователь может изменить положение источника и/или датчика. В варианте информация о погрешности позиционирования может быть использована для автоматического изменения положения источника излучения через автоматическую систему управления положением. Таким образом, изобретением предлагается интересная альтернатива для устройства, называемого «ангулятором».
В вариантах выполнения, в которых число электромагнитных излучателей блока излучения электромагнитных волн, по меньшей мере, равно четырем, и блок приема электромагнитных волн конфигурирован таким образом, чтобы также детектировать угол между плоскостью блока излучения электромагнитных волн и плоскостью блока приема электромагнитных волн. Этот угол включает угловую погрешность (называемую погрешностью параллакса) между источником излучения и датчиком.
Это позволяет пользователю корректировать вручную угол падения испускаемого излучения (то есть рентгеновских лучей) с направлением, перпендикулярным к плоскости датчика, для уменьшения погрешности параллакса. Таким образом, получаемый рентгеновский снимок содержит меньше искажений, и лучше соблюдаются реальные пропорции исследуемой мишени.
В этих вариантах выполнения блок приема электромагнитных волн содержит число М электромагнитных приемников, расположенных в одной плоскости в соответствующих положениях, не симметричных относительно первой оси и/или второй оси в указанной плоскости, при этом М является целым числом, большим или равным 2. Блок приема электромагнитных волн может быть также конфигурирован с возможностью определения, путем обработки сигнала, сигналов, поступающих от разных электромагнитных излучателей, для каждого из М электромагнитных приемников и для определения поворота указанной плоскости по отношению к указанной первой оси и/или указанной второй оси соответственно.
Эти варианты выполнения позволяют детектировать направление (то есть угловое положение) датчика изображения в его собственной плоскости и, следовательно, в частности, позволяют автоматически определять, осуществляет ли пользователь рентгенографию верхней или нижней челюсти с правой или с левой стороны рта.
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания. Это описание носит исключительно иллюстративный характер и представлено со ссылками на прилагаемые чертежи, на которых:
фиг.1 (уже описана) - схема принципа стоматологической цифровой рентгенологии;
фиг.2 (тоже описана) - схема технического решения из предшествующего уровня техники, известного под названием ангулятора, для решения проблемы относительного позиционирования источника излучения и датчика в рамках стоматологической цифровой рентгенологии;
фиг.3 и 4 - схемы варианта выполнения и принципа работы установки, являющейся объектом настоящего изобретения;
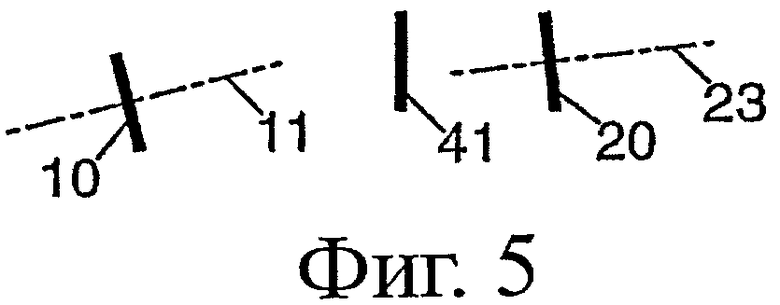
фиг.5 - упрощенная схема принципа погрешности параллакса между источником излучения и датчиком в контексте подвижной цифровой рентгеноустановки;
фиг.6а, 6b и 6с - схемы вариантов выполнения устройства излучения электромагнитных волн;
фиг.7, 8а и 8b - схемы варианта выполнения блока приема электромагнитных волн, обеспечивающего автоматическое детектирование направления датчика изображения в его собственной плоскости;
фиг.9 - схема варианта выполнения установки, обеспечивающая более быстрое интегрирование датчика изображения.
В дальнейшем тексте и на чертежах одинаковые элементы обозначены одинаковыми позициями. Описание изобретения связано с неограничительным вариантом его применения для подвижной цифровой рентгеноустановки. Под подвижной рентгеноустановкой следует понимать установку, в которой источник излучения и/или датчик изображения не соединены неподвижно друг с другом. Под цифровой установкой следует понимать установку, в которой процесс получения изображений, по меньшей мере, частично реализуется цифровыми средствами.
Функциональное описание установки
Как показано на фиг.3 и фиг.4, цифровая рентгеноустановка согласно вариантам выполнения изобретения содержит источник 10 излучения, такой как генератор рентгеновских лучей. Трубка 12 генератора является цилиндром, предназначенным для формирования генерируемого пучка рентгеновских лучей, например, в виде конуса с очень незначительным расхождением, то есть, по существу, постоянного диаметра, например, равного 60 мм. Главная ось трубки 12 соответствует оси 11 падения генерируемых рентгеновских лучей.
Установка содержит также цифровой датчик 20 изображения. Он может содержать видеодетектор CCD 22, связанный со сцинтиллятором 21 (который во время работы находится со стороны CCD, направленной к источнику рентгеновских лучей). Датчик изображения с видеодетектором CCD имеет, например, размер 2, то есть его чувствительная поверхность соответствует прямоугольнику с диаметром, равным 48 мм. Датчик изображения соединен с блоком управления и эксплуатации, который производит собственно рентгеновское изображение.
Разумеется, можно предусмотреть и другие размеры, отличные от вышеуказанных, однако приведенные размеры являются типовыми для применения в стоматологической цифровой рентгенологии.
Для обеспечения правильного позиционирования источника 10 излучения и датчика 20 изображения установка дополнительно содержит блок 13 излучения электромагнитных волн, который может быть присоединен к источнику 10, и блок приема электромагнитных волн, который может быть присоединен к датчику 20 изображения, и которые взаимодействуют друг с другом. Эти элементы образуют устройство, которое позволяет детектировать погрешность позиционирования источника 10 излучения по отношению к датчику 20 изображения.
Устройство выполнено с возможностью индикации для пользователя любой погрешности позиционирования. Врач может корректировать эту погрешность вручную или через автоматизированное устройство управления. Для этого источник 10 может быть установлен на механической системе или пантографе устойчиво, и в то же время мобильно и с возможностью регулирования В варианте погрешность позиционирования поступает на вход автоматического устройства управления, которое автоматически позиционирует источник рентгеновских лучей по отношению к датчику изображения
С учетом медицинских стандартов и из соображений легкости интегрирования предпочтительно на датчике изображения располагают приемник электромагнитных волн, а не излучатель электромагнитных волн. Действительно, предпочтительно избегать излучения мощности со стороны датчика, который во время работы помещают в рот пациента. Таким образом, избегают или, по меньшей мере, существенно уменьшают опасность возможного выделения тепла, которое может вызвать дискомфорт или испугать пациента. За счет этого снижают также искажение измерений излучения датчиком изображения. Кроме того, это помогает соблюдать нормы электромагнитной совместимости (СЕМ или EMI - "Electro-magnetic unterferences"), которые являются очень строгими для этого класса приборов.
Со стороны излучения устройство детектирования погрешности позиционирования содержит блок излучения электромагнитных волн, который для использования в рабочем режиме присоединяют к источнику 10 излучения. Этот блок излучения управляется блоком 15. Блок 15 содержит, например, микропроцессор, управляемый прикладной программой. Блок излучения содержит также совокупность, по меньшей мере, 3 управляемых генераторов электромагнитных волн, таких как соленоиды. Соленоиды размещают, например, в одной плоскости, которая является перпендикулярной к оси 11 падения пучка рентгеновских лучей. Например, они расположены на опоре 13 тороидальной формы, внутренний диаметр которой предусмотрен для ее крепления на конце трубки генератора 10. При такой конструкции плоскость опоры 13 соответствует плоскости конца трубки 12 генератора 10.
Как показано на фиг.4, соленоиды 120 предпочтительно распределены на одинаковом расстоянии (то есть в соответственно распределенных угловых положениях) вдоль венца, образованного главной плоскостью опоры 12. Это расположение позволяет упростить обработку, осуществляемую со стороны приема. Таким образом, на фиг.4 показаны 3 соленоида, попарно отстоящие друг от друга на угол, равный 120 градусов.
Каждый из этих соленоидов 120 излучает с определенной повторяемостью направленное магнитное поле. Для этого они возбуждаются системой управления, управляемой блоком 15 управления В частности, блок 15 модулирует поле по определенному растру, имеющему двоичный рисунок, специфический для каждого из соленоидов излучения. Это позволяет блоку приема, путем обработки сигнала, идентифицировать (то есть определять и выделять) сигналы, поступающие от разных излучающих соленоидов.
Со стороны приема устройство детектирования погрешности позиционирования содержит, по меньшей мере, один приемный соленоид 230, который при использовании в рабочем режиме присоединяют к датчику 20 изображения. Например, этот соленоид располагают на площадке 23, находящейся сзади датчика, то есть со стороны, противоположной чувствительной поверхности датчика, то есть также со стороны CCD 22, противоположной сцинтиллятору 21, или со стороны датчика 20, которая во время работы расположена противоположно источнику 10.
Блок приема электромагнитных волн содержит также средства обработки, такие как блок 25 эксплуатации. Блок 25 содержит, например, микропроцессор и управляется прикладной программой. Предпочтительно он может совпадать с блоком управления и эксплуатации цифрового датчика 20 изображения, причем эти элементы выполнены, например, в виде компьютера, например в виде обычного персонального компьютера.
Таким образом, как показано на фиг.4, приемный соленоид 230 улавливает магнитное поле, излучаемое излучающим соленоидом. Принятый таким образом сигнал обрабатывается электронным способом, затем оцифровывается для анализа путем обработки сигнала на уровне блока 25.
Общий принцип работы
Напряженность и фаза электромагнитных полей зависят от расстояния и угла, под которым они измеряются, относительно точки их излучения, то есть относительно места расположения излучающих соленоидов, которые их генерируют.
Генерируемые электромагнитные волны предназначены для прохождения через ткани человеческого тела, разумеется, не влияя на физическую целостность тканей и на здоровье пациента. Такие электромагнитные волны являются, например, радиоволнами (создаваемыми электрическими токами высокой частоты) соответствующей мощности. Например, частота электромагнитных волн может иметь значение, меньшее 100 МГц. В частности, эта частота может находиться в диапазоне [10 МГц - 100 МГц].
Такие волны хорошо распространяются в воздухе, но не настолько хорошо в тканях тела и еще хуже - в плотных частях, таких как зубы или кости. Учитывая уровень электромагнитного излучения, принятый сигнал, как правило, является достаточно слабым, порядка нескольких микровольт (мкВ), поэтому его трудно обрабатывать.
Принципом работы, который все же дает хорошие результаты в таких мало благоприятных условиях, является использование относительной напряженности полей между излучающими соленоидами 120 для выявления точки, где они уравновешиваются. Условно считая, что характеристики излучателей являются идентичными, эта точка соответствует центру плоскости опоры 13 излучающих соленоидов. Приемный соленоид предпочтительно помещают напротив центра чувствительной поверхности датчика 20 изображения. Однако такое расположение не является обязательным, так как при вычислениях, приводящих к обнаружению или к не обнаружению погрешности позиционирования, можно учитывать известное расстояние между центром чувствительной поверхности датчика 20 изображения и местом нахождения приемного соленоида.
Величину погрешности по отношению к точке равновесия электромагнитных полей, генерируемых излучающими соленоидами, можно определить на основании относительной напряженности полей, если известно ослабление в зависимости от расстояния, что можно осуществить либо путем применения законов распространения электромагнитных волн, либо путем простой калибровки системы. Таким образом, можно получить относительно точную оценку положения приемного соленоида относительно плоскости, образованной излучающими соленоидами с использованием ряда триангуляционных вычислений.
Поскольку измеряются относительные амплитуды и фазы, предпочтительно, чтобы сигналы, излучаемые каждым излучающим соленоидом, имели идентичные характеристики с точки зрения амплитуды, частоты, фазы, периода повторения и создаваемого электромагнитного поля (в частности, поляризации). Эффективность определения повышается при помощи упрощенных вычислений. Для этого, в частности, предусматривают соленоиды 120, идентичные друг другу.
Предпочтительно также, чтобы излучающие соленоиды изучали не в одно и то же время. Иначе говоря, поскольку информация имеет идентичную природу, ее сложнее дифференцировать при приеме (в этом случае каждый электромагнитный сигнал будет вести себя, как помеха по отношению к другим сигналам). В варианте выполнения блок излучения выполнен с возможностью реализации последовательности управления излучающими соленоидами на основе правила типа «один за один раз», например, «каждый по очереди», по которой можно синхронизировать блок приема. Иначе говоря, все излучающие соленоиды излучают, но каждый по очереди. Эта последовательность учитывается процессором, управляющим блоком излучения.
Детектирование погрешности параллакса
Описанные выше варианты выполнения позволяют обеспечивать позиционирование источника рентгеновских лучей относительно датчика изображения. Однако не всегда достаточно только правильного позиционирования.
Как показано на фиг.5, действительно, кроме всего прочего, желательно выровнять выходную ось 11 источника 10 (ось падения рентгеновских лучей) по оси 23, перпендикулярной к чувствительной поверхности датчика 20. В случае погрешности углового выравнивания (называемой также погрешностью параллакса) между источником излучения и датчиком получаемое изображение мишени искажается. Это связано с направленностью рентгеновских лучей. Использование механического устройства позиционирования, такого как ангулятор, описанный во вступительной части, позволяет устранить эту трудность. Однако его использование характеризуется уже упомянутыми выше недостатками.
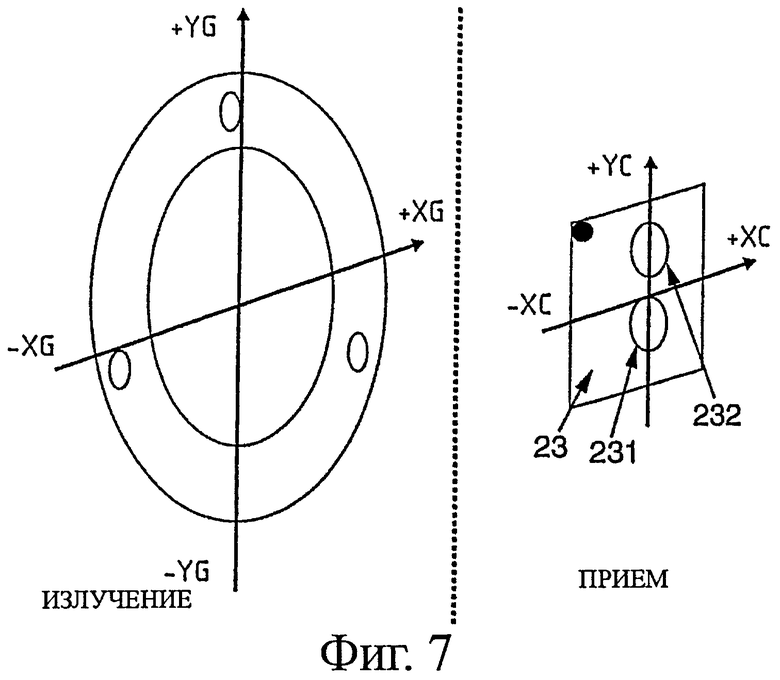
Варианты выполнения дают решение дополнительной проблемы детектирования погрешности параллакса. Действительно, распознавание формы электромагнитных полей позволяет определить также падающий угол между электромагнитными излучателями и электромагнитным(и) приемником(ами). Этот угол соответствует погрешности параллельности между плоскостями {XG,YG} и {XC,YC} соответственно генератора рентгеновских лучей и датчика изображения, которая соответствует измерению погрешности параллакса между первым и вторым.
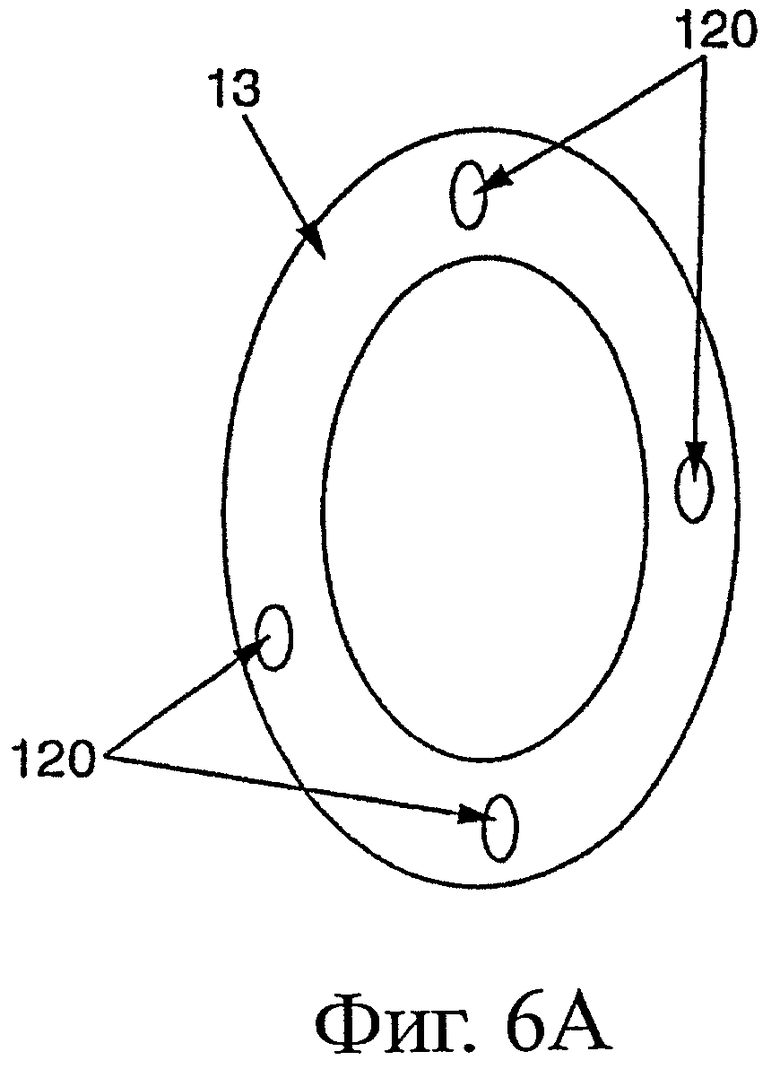
Необходимо отметить, что выделение этой информации требует наличия, по меньшей мере, четырех излучающих соленоидов. Иначе говоря, в вариантах выполнения блок электромагнитного излучения содержит, по меньшей мере, четыре идентичных электромагнитных излучателя 120.
Такой вариант выполнения схематично показан на фиг.6а.
Вычисления, позволяющие определить угол падения между электромагнитными излучателями и электромагнитным(и) приемником(ами), в данном случае производятся блоком 25 управления. Применяются классические правила триангуляции и тригонометрии, которые не нуждаются в пояснении. Действительно, специалист может их применять, например, в виде соответствующей прикладной программы.
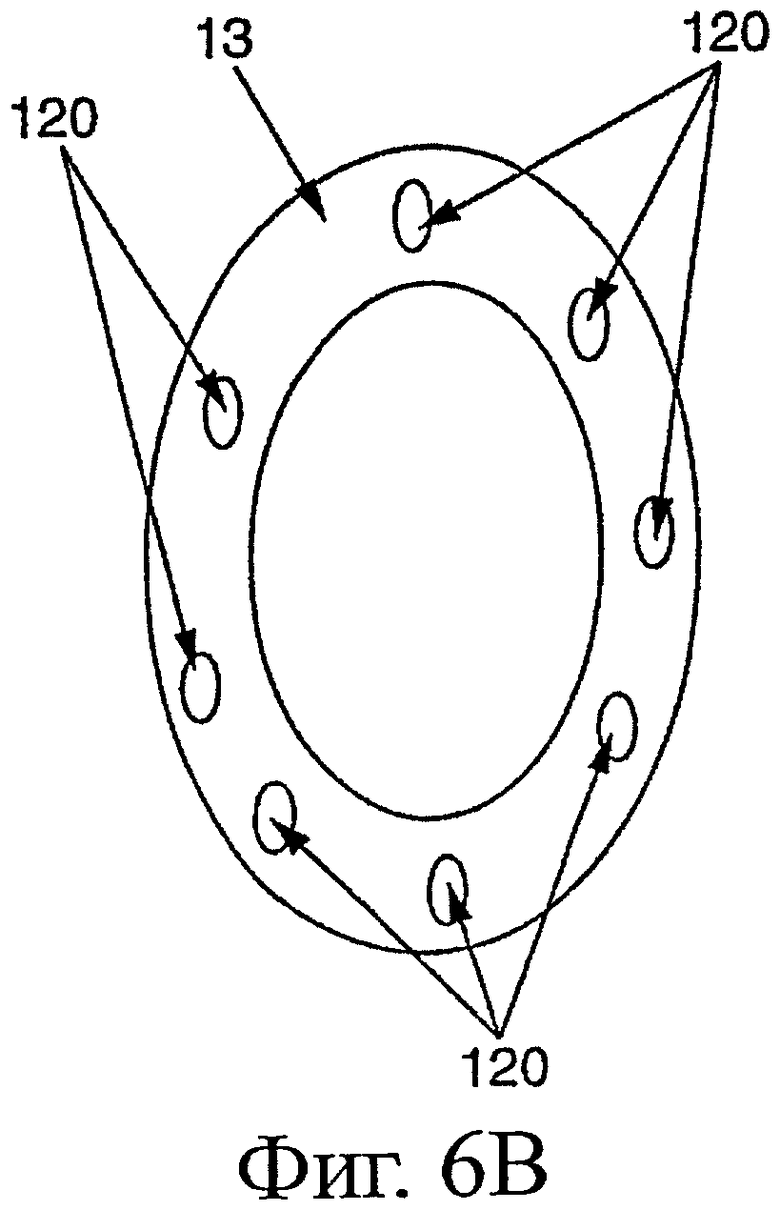
В предпочтительном варианте выполнения, соответствующем схеме на фиг.6b, блок излучения электромагнитных волн содержит 8 идентичных излучающих соленоидов или электромагнитных излучателей. Это число дает наилучший компромисс между сложностью производимых вычислений и достигаемым уровнем эффективности.
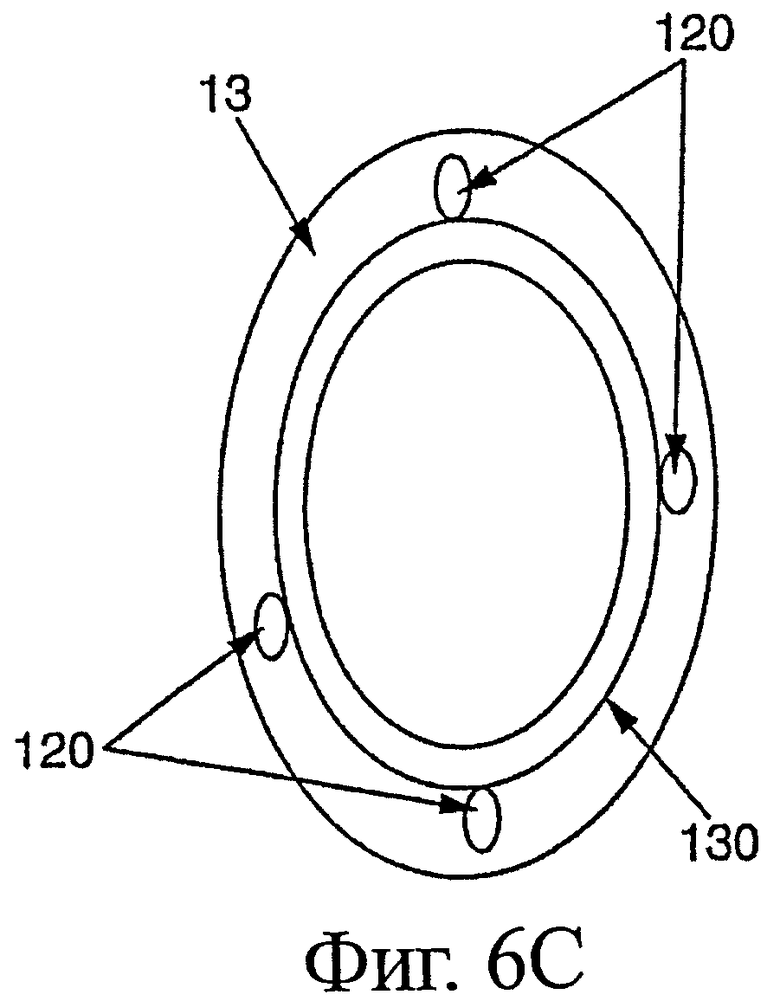
В вариантах выполнения N соленоидов блока излучения электромагнитных волн могут содержать центральный излучающий соленоид, соответствующий центру тороидальной опоры 13. Такой вариант выполнения показан, например, на фиг.6с, где этот центральный соленоид 130 имеет диаметр между внутренним диаметром и наружным диаметром тора 13. Предпочтительно соленоид 130 имеет больший диаметр, большую площадь и более высокую производительность, чем соленоиды 120, что позволяет улучшить измерения, получаемые для других соленоидов.
Детектирование направления датчика изображения
Когда рентгеновский датчик помещают в рот пациента, рентгенография может, в частности, производиться для зубов верхней челюсти или нижней челюсти, с правой стороны или с левой стороны лица пациента. Провод, соединяющий блок 25 управления и эксплуатации с датчиком 20 изображения, требует разного углового положения последнего в каждом из этих четырех случаев. Отсюда следует, что направление получаемого изображения должно быть определено и отмечено врачом на изображении, например, путем записи на самоклеющейся пластинке, располагаемой на полученном рентгеновском снимке, или путем введения вручную на клавиатуре компьютера для включения в сам снимок.
Для устранения этих недостатков и чтобы избежать любой возможности ошибки во время дальнейшей идентификации рентгеновских изображений, варианты выполнения позволяют автоматически определять направление датчика во рту и учитывать его во время получения изображения таким образом, чтобы его можно было идентифицировать и/или отобразить соответствующим образом. Действительно, описанное выше устройство, которое обеспечивает определение положения датчика по отношению к плоскости излучающих соленоидов, можно усовершенствовать, чтобы оно обеспечивало также детектирование направления датчика изображения.
Если блок приема электромагнитных волн содержит только один приемный соленоид, как в случае варианта выполнения, показанного на фиг.4 (на которой угловое положение устройства отмечено черной точкой в углу площадки 23), поворот, например, на 180 градусов дает одинаковое положение. Это связано с тем, что при триангуляционных вычислениях учитывается только одна точка, соответствующая центру приемного соленоида 230.
Можно дискриминировать разные угловые положения приемного блока в его собственной плоскости, предусмотрев, по меньшей мере, два приемных соленоида, таких как соленоиды 231 и 232 в варианте выполнения, показанном на фиг.7. На уровне каждого из них наблюдают электромагнитные сигналы, поступающие от электромагнитных излучателей 120 электромагнитного излучающего блока. При этом производят две серии триангуляционных вычислений на основе двух наборов сигналов, полученных соответственно на уровне каждого приемника 231 и 232. Соленоиды 231 и 232 смещены друг от друга по отношению к оси или осям отсчета, которыми в данном случае являются вертикальная ось (-YC, +YC) и горизонтальная ось (-ХС, +ХС) плоскости (ХС, YC) датчика изображения.
Иначе говоря, в блок приема электромагнитных волн добавляют, по меньшей мере, один второй приемник электромагнитных волн таким образом, чтобы при его неподвижном соединении с датчиком 20 изображения обеспечить определение угла, образованного осью, перпендикулярной к чувствительной поверхности датчика изображения, и осью падения рентгеновских лучей, выходящих из генератора 10. Соленоиды находятся в одной плоскости (плоскость площадки 23) в соответствующих положениях, не симметричных относительно первой оси и/или второй оси в указанной плоскости. Определение положения по отношению к излучающим соленоидам в этом случае осуществляют для каждого из приемных соленоидов. Таким образом, относительные положения дают угол поворота площадки в собственной плоскости площадки. Речь идет также об угле поворота датчика изображения по отношению к плоскости конца трубки 12 генератора, при этом предполагается, что соответствующие плоскости датчика и генератора являются параллельными за счет хорошего регулирования параллакса. Действительно, следует отметить, что этот метод детектирования поворота предполагает что плоскости {XG, YG} и {ХС, YC} являются параллельными.
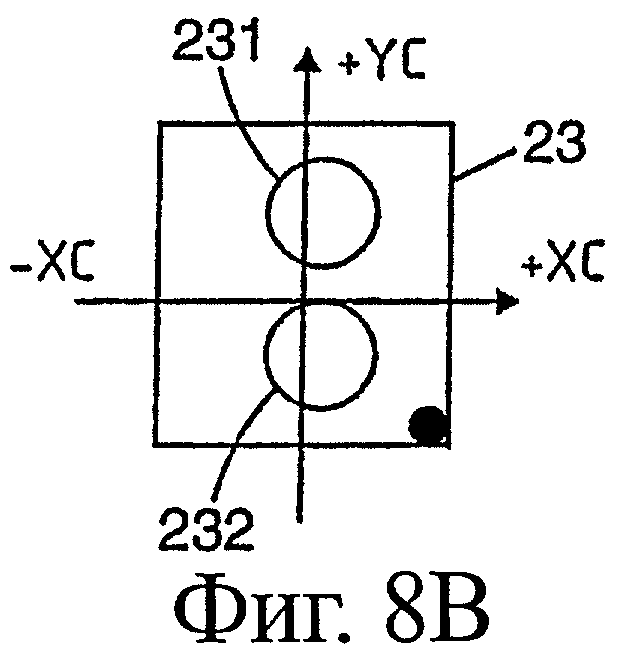
Таким образом, как показано в виде схем на фиг.8а и 8b, на которых приемный блок показан в двух соответствующих угловых положениях, смещенных относительно друг друга на 180° (что показано черной точкой, отмечающей угол площадки 23), поворот площадки 23 приводит к разности расстояния между каждым из приемных соленоидов 231 и 232, с одной стороны, и каждым из излучающих соленоидов (не показанных на чертежах), с другой стороны.
Определение углового направления датчика изображения обеспечивает автоматический поворот изображения, выводимого на видеомонитор установки, при помощи прикладной программы, исполняемой компьютером 25. Разумеется, это предполагает также, что направление генератора рентгеновских лучей известно.
Предпочтительно соленоиды 231 и 232 располагают на максимальном расстоянии друг от друга, чтобы облегчить дискриминацию разных направлений. В рассматриваемом варианте применения эту дискриминацию осуществлять не трудно, так как необходимо дискриминировать только четыре угловых положения (от 0 до 360 градусов с шагом 90 градусов).
Детектирование присутствия рентгеновских лучей
Цифровой датчик для исследования при помощи рентгеновских лучей обычно содержит CCD-матрицу, покрытую химическим элементом (соответствующую сцинтиллятору), преобразующим рентгеновские лучи в фотоны.
В известных остановках детектирование рентгеновских лучей (называемое детектированием TRIG) происходит автономно на уровне датчика изображения при переходе порогового значения для количества света, принятого на уровне датчика. Когда на уровне датчика имеется информация о присутствии рентгеновских лучей, он управляется в так называемом режиме «интеграции», при котором он поддерживается в статике для обеспечения возможности улавливания всех рентгеновских лучей, которые продолжают поступать до конца периода экспозиции. Понятно, что детектирование присутствия рентгеновских лучей возможно только, если излучение уже является активным, отсюда происходит неизбежная задержка при переходе в режим интеграции, что приводит к расплывчатости изображения. Среднее время реакции составляет порядка 2 миллисекунд для времени экспозиции, составляющего от 15 до 250 миллисекунд.
Известны также варианты выполнения, в которых информация о присутствии рентгеновских лучей поступает в датчик от генератора через линию связи между первым и вторым для улучшения качества изображения. Однако эти варианты требуют учета функциональности уже на стадии разработки каждого из компонентов установки, так как для нее нужен интерфейс между блоком управления генератором и блоком управления и эксплуатации датчика изображения. Следовательно, ее невозможно предусмотреть, когда эти компоненты изначально не выполнены взаимозаменяемыми, например, поскольку поставляются различными производителями.
Чтобы устранить эти недостатки, варианты выполнения в соответствии с настоящим изобретением предусматривают размещение устройства детектирования рентгеновских лучей перед концом трубки 12 генератора рентгеновских лучей. Этот детектор рентгеновских лучей можно механически присоединить к блоку электромагнитного излучения, например, установив его на опоре 13 излучающих соленоидов 120 и 130.
На фиг.9 показан такой детектор 14, типа фотодиода, оборудованного сцинтиллятором, расположенный на опоре 13 блока излучения электромагнитных волн. Блок 15 управления содержит простую электронику обработки сигнала, поступающего от детектора 14.
Информация о присутствии рентгеновских лучей, поступающая от детектора 14, передается в закодированном виде излучающими соленоидами 120 в блок приема электромагнитных волн, например, на другой частоте модуляции. Блок управления 25 приемного блока может в этом случае подать команду на работу датчика 20 изображения в режиме интеграции.
Время реакции сокращается в 10 раз по сравнению с детектированием на самом датчике изображения, так как сигнал является очень сильным на выходе трубки 12, которая находится вблизи источника рентгеновских лучей, и поскольку излучению не мешает никакое препятствие. На практике таким образом можно получить время реакции порядка 200 миллисекунд. Сокращение задержки установления режима интеграции для датчика изображения обеспечивает также сокращение времени экспозиции при таком же качестве изображения.
Представленное выше описание примеров выполнения не является ограничительным, и можно предусмотреть другие варианты выполнения. Например, цифровой детектор CCD можно заменить детектором с фототранзисторами (фотодиодами), выполненными по технологии КМОП. Датчик изображения не обязательно должен быть цифровым, и может быть аналоговым датчиком, выходная информация которого может быть оцифрована или нет. Наконец, источник излучения не обязательно является генератором рентгеновских лучей, а может быть генератором гамма-излучения или другого излучения.
Представленные выше варианты выполнения, как и другие варианты, позволяют осуществлять несинхронную работу между блоком излучения и блоком приема. Это свойство можно использовать для создания рабочего устройства, в котором излучатели, расположенные на трубке генератора рентгеновских лучей, могут работать автономно на батареях. Это позволяет избежать использования электрических проводов, которые трудно прокладывать на трубке генератора, находящейся на конце шарнирной стойки длиной более 2 метров.
Из вариантов выполнения настоящего изобретения вытекают также следующие признаки и преимущества:
- кнопка, находящаяся на блоке 15 обработки излучающего блока, позволяет подавать напряжение на излучающий блок в течение определенного времени, которое можно определить заранее;
- приемный блок можно интегрировать в рентгеновский датчик изображения или установить на находящейся на последнем небольшой площадке;
- поскольку цифровая обработка, применяемая на уровне блока приема электромагнитных волн, требует повышенной мощности вычисления, эту обработку можно производить во внешнем блоке или можно осуществлять в электронной схеме управления датчиком изображения, если электронная схема это позволяет;
- управление позиционированием генератора по отношению к датчику может осуществлять электронная схема управления рентгеновским датчиком изображения;
- фон, создаваемый электромагнитным излучателем, не мешает работе рентгеновского датчика изображения,
- уровень излучения электромагнитных волн совместим с нормами СЕМ;
- присутствие электромагнитного излучателя не приводит к несовместимости использования с интрузивным элементом, таким как стоматологический рентгеновский датчик изображения;
- соленоид, интегрированный в рентгеновский датчик изображения, может быть электромагнитным излучателем, соленоиды, неподвижно соединенные с генератором, в этом случае становятся электромагнитными приемниками. Базовый принцип остается строго неизменным, так как физические системы всегда являются симметричными и обратимыми. Виды математической обработки (триангуляционные вычисления) просто претерпевают перестановку. Если эти виды обработки должны осуществляться прикладной программой, управляющей рентгеновским датчиком изображения (которая исполняется на компьютере, обычно используемым врачом-рентгенологом), блок приема, работающий на уровне генератора рентгеновских лучей, должен иметь каналы связи с прикладной программой типа проводных (протокол USB, RS232,…) или беспроводных (нормы WIFI, Bluetooth,…);
- блок излучения электромагнитных волн выполнен с возможностью передачи, а блок приема выполнен с возможностью приема дополнительной информации, не считая двоичного представления. Эта дополнительная информация может включать информацию о детектировании излучения от источника излучения или другую информацию по управлению, сигнализации и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛЕВОГО ОБЪЕКТА | 2018 |
|
RU2781347C2 |
| РЕНТГЕНОВСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛЕВОГО ОБЪЕКТА ПРИ МЕДИЦИНСКОЙ ПРОЦЕДУРЕ И СПОСОБ ПОЗИЦИОНИРОВАНИЯ РЕНТГЕНОВСКОЙ СИСТЕМЫ | 2018 |
|
RU2807152C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЭТОГО (ВАРИАНТЫ) | 2008 |
|
RU2481554C2 |
| Способ беспроводной связи на случайном потоке резонансных гамма-квантов и устройство для реализации способа | 2023 |
|
RU2823258C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ЭЛЕКТРОМАГНИТНЫХ СИГНАЛОВ | 1996 |
|
RU2117397C1 |
| УСТРОЙСТВО ДЛЯ ИЗЛУЧЕНИЯ ПЕРВОГО ПУЧКА ФОТОНОВ ВЫСОКОЙ ЭНЕРГИИ И ВТОРОГО ПУЧКА ФОТОНОВ БОЛЕЕ НИЗКОЙ ЭНЕРГИИ, УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ И СПОСОБ | 2009 |
|
RU2511604C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ УСТРОЙСТВА ДИАГНОСТИКИ ТРУБОПРОВОДА (УДТ) | 2010 |
|
RU2451286C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ СТРУКТУР МОЗГА ЧЕРЕЗ ТОЛСТЫЕ КОСТИ ЧЕРЕПА | 2015 |
|
RU2636851C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| Система электронного замка | 2021 |
|
RU2821387C1 |





Изобретение относится к медицинской технике, а именно к подвижным системам получения снимков. Устройство детектирования погрешности позиционирования между первым элементом и вторым элементом содержит блок излучения электромагнитных волн, выполненный с возможностью неподвижного соединения с первым элементом, и блок их приема и цифровой обработки, выполненный с возможностью присоединения ко второму элементу. Второй блок взаимодействует с блоком излучения электромагнитных волн для детектирования погрешности позиционирования первого элемента относительно второго элемента. Блок излучения содержит N электромагнитных излучателей, расположенных в одной плоскости, где N - число большее или равное 3, и блок управления, выполненный с возможностью подачи, для каждого из N электромагнитных излучателей, соответствующего электромагнитного сигнала, причем указанный электромагнитный сигнал соответствует направленному электромагнитному полю, модулируемому по растру с двоичным представлением, определенным для указанного излучателя, и позволяет блоку приема электромагнитных волн идентифицировать путем обработки сигналов электромагнитные сигналы, поступающие соответственно от каждого из электромагнитных излучателей. Устройство детектирования входит в состав подвижной установки для получения изображения. По первому варианту выполнения установки блок излучения присоединен к источнику излучения, а блок приема - к датчику изображения. Во втором варианте блок излучения присоединен к датчику изображения, а блок приема - к источнику излучения. Использование изобретения позволяет осуществлять несинхронную работу между блоком излучения и блоком приема для упрощения работы с устройством. 3 н. и 16 з.п. ф-лы, 9 ил.
1. Устройство детектирования погрешности позиционирования между первым элементом (10) и вторым элементом (20), содержащее:
блок (13, 15) излучения электромагнитных волн, выполненный с возможностью излучения электромагнитных волн, подходящих для прохождения через ткани тела, при этом блок излучения выполнен с возможностью присоединения к первому элементу; и
блок (23, 25) приема электромагнитных волн, предназначенный для приема электромагнитных волн и цифровой обработки, причем указанный блок приема электромагнитных волн выполнен с возможностью присоединения ко второму элементу и с возможностью взаимодействия с блоком излучения электромагнитных волн для детектирования погрешности позиционирования первого элемента относительно второго элемента,
при этом блок излучения содержит N электромагнитных излучателей (120, 130), по существу, расположенных в одной плоскости, где N - число большее или равное 3, и блок (15) управления, выполненный с возможностью подачи, для каждого из N электромагнитных излучателей, соответствующего электромагнитного сигнала, причем указанный электромагнитный сигнал соответствует направленному электромагнитному полю, модулируемому по растру с двоичным представлением, определенным для указанного излучателя, и позволяет блоку приема электромагнитных волн идентифицировать путем обработки сигналов электромагнитные сигналы, поступающие соответственно от каждого из электромагнитных излучателей.
2. Устройство по п.1, в котором блок приема электромагнитных волн содержит по меньшей мере один приемный соленоид (230).
3. Устройство по п.2, в котором блок приема электромагнитных волн выполнен с возможностью получения оценки положения приемного соленоида относительно плоскости, образованной электромагнитными излучателями, используя ряд триангуляционных вычислений.
4. Устройство по п.1, в котором блок управления блоком излучения электромагнитных волн выполнен таким образом, чтобы электромагнитные излучатели излучали по одному за раз, причем каждый с заданным периодом повторяемости.
5. Устройство по п.4, в котором блок управления блоком излучения электромагнитных волн выполнен таким образом, чтобы сигналы, испускаемые электромагнитными излучателями, кроме эффекта модуляции, имели общие характеристики по амплитуде, частоте, фазе, периоду повторения и электромагнитному полю.
6. Устройство по п.1, в котором N, по меньшей мере, равно 4.
7. Устройство по 6, в котором N равно 8.
8. Устройство по любому из пп.1-5, в котором каждый из N электромагнитных излучателей содержит соленоид (120).
9. Устройство по п.8, в котором соленоиды расположены на опоре (13) тороидальной формы, при этом центр одного из соленоидов (130) соответствует центру опоры, а его диаметр - между внутренним диаметром и наружным диаметром опоры.
10. Устройство по п.6 или 7, в котором блок приема электромагнитных волн выполнен также с возможностью определения путем обработки сигнала угла между плоскостью блока излучения электромагнитных волн и плоскостью блока приема электромагнитных волн.
11. Устройство по любому из пп.1-7, в котором блок приема электромагнитных волн содержит М электромагнитных приемников, расположенных в одной плоскости в соответствующих положениях, не симметричных по отношению к первой оси и/или второй оси в указанной плоскости, при этом М является числом, превышающим или равным 2, при этом блок приема электромагнитных волн выполнен также с возможностью определения путем обработки сигнала сигналов, поступающих от различных электромагнитных излучателей, для каждого из М электромагнитных приемников и с возможностью определения поворота указанной плоскости по отношению к указанной первой оси и/или указанной второй оси соответственно.
12. Устройство по любому из пп.1-7, в котором блок излучения электромагнитных волн выполнен с возможностью передачи, а блок приема электромагнитных волн выполнен с возможностью приема дополнительной информации, не считая двоичного представления.
13. Устройство по любому из пп.1-7, в котором электромагнитные волны являются радиоволнами.
14. Устройство по п.13, в котором частота электромагнитных волн имеет значение меньше 100 МГц.
15. Подвижная установка для получения изображения, содержащая:
источник (10) излучения; и
датчик (20) изображения, содержащий поверхность (212), чувствительную к излучению, генерируемому источником излучения, и не присоединенный к источнику излучения, и
устройство детектирования погрешности позиционирования по любому из пп.1-14, при этом
блок излучения электромагнитных волн присоединен к источнику излучения; а
блок приема электромагнитных волн присоединен к датчику изображения.
16. Установка по п.15, в которой N электромагнитных излучателей блока излучения электромагнитных волн расположены равноудалено в плоскости, перпендикулярной направлению падающего излучения от источника излучения.
17. Установка по п.15 или 16, характеризующаяся тем, что дополнительно содержит детектор (14) излучения, выполненный с возможностью детектирования излучения, генерируемого источником излучения, и присоединенный к блоку излучения электромагнитных волн, при этом блок излучения электромагнитных волн выполнен с возможностью передачи на блок приема электромагнитных волн информации о присутствии излучения, поступающей от указанного детектора излучения.
18. Подвижная установка для получения изображения, содержащая:
источник (10) излучения,
датчик (20) изображения, содержащий поверхность (212), чувствительную к излучению, генерируемому источником излучения, и не присоединенный к источнику излучения, и
устройство детектирования погрешности позиционирования по любому из пп.1-14, при этом
блок излучения электромагнитных волн соединен с датчиком изображения; а
блок приема электромагнитных волн присоединен к источнику излучения.
19. Установка по п.18, характеризующаяся тем, что дополнительно содержит детектор (14) излучения, выполненный с возможностью детектирования излучения, генерируемого источником излучения, и присоединенный к блоку излучения электромагнитных волн, при этом блок излучения электромагнитных волн выполнен с возможностью передачи на блок приема электромагнитных волн информации о присутствии излучения, поступающей от детектора излучения.
| US 4792228 А, 20.12.1988 | |||
| US 5289522 А, 22.02.1994 | |||
| JP 4312451 A, 04.11.1992 | |||
| US 2005063512 A1, 24.03.2005 | |||
| СПОСОБ ЭКСПРЕСС-ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ ВНУТРЕННИХ ОРГАНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147834C1 |
| РЕНТГЕНОВСКИЕ СРЕДСТВА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ЛУЧЕВОЙ ТЕРАПИИ ЗЛОКАЧЕСТВЕННЫХ НОВООБРАЗОВАНИЙ | 2000 |
|
RU2209644C2 |

