Изобретение относится к области жизненных потребностей человека, а более конкретно - к способам и устройствам для спасения жизни людей, терпящих бедствие на море, в том числе - людей, катапультировавшихся с летательных аппаратов, и может быть использовано для поиска и спасения этих людей в сложных гидрометеорологических условиях - низкой облачности, тумане, в условиях полярной ночи, и при отсутствии у этих людей возможности определения своих координат, а также в условиях отсутствия прямой связи (радиосвязи) со спасателями.
Известен способ поиска и спасения терпящих бедствие людей, при котором выявляют сигнал бедствия (SOS), посылаемый, например, с потерпевшего аварию судна, определяют координаты источника сигнала, или пеленг этого источника, и направляют к этому источнику сигнала спасательные средства (например, другое судно). На это судно переправляют людей [1].
Этот известный способ широко применяется на море, однако он обладает низкой оперативностью, не может быть использован в сложных гидрометеорологических условиях, а также при отсутствии у терпящих бедствие людей технических устройств для подачи сигнала бедствия и устройств для определения своих координат.
Известна также поисково-спасательная система, содержащая базовое плавсредство, на котором расположен судовой радиоприемник с всенаправленной антенной, закрепленной на мачте для приема сигнала тревоги от терпящего бедствие. Система дополнительно содержит малое спасательное плавсредство с ручным приемо-пеленгаторным устройством [2]. Это повышает оперативность поиска и спасения, например, человека в воде, на теле которого закреплен радиоидентификатор [2].
Однако при отсутствии радиоидентификатора или другого источника сигнала бедствия эта система не может быть использована.
Наиболее близким к заявляемому способу является способ проведения аварийно-спасательных работ терпящих бедствие на море людей, при котором в предполагаемую зону бедствия направляют пилотируемый вертолет, осуществляя поиск терпящих бедствие людей путем визуального наблюдения при движении по прямоугольным галсам, а спасательные работы производят в режиме зависания с перемещением людей на вертолет с помощью лебедок и других специальных устройств [3].
Этот известный способ обладает существенными преимуществами по сравнению с аналогами - большой оперативностью, а также возможностью применения при отсутствии у людей, терпящих бедствие, технических устройств для подачи сигнала бедствия и устройств для определения своих координат.
Однако этот известный способ обладает низкой эффективностью в сложных гидрометеорологических условиях, в частности в условиях низкой облачности (50-100 метров), тумана или осадков и в условиях ночи, а также в условиях сильного дрейфа зоны со спасаемыми людьми, например дрейфа льдины или шлюпки под действием штормового ветра. При этом очень велики расходы энергоресурсов у пилотируемого вертолета при поиске терпящих бедствие. А при штормовом ветре и соответственно при штормовом волнении становится практически невозможным спасение людей со шлюпок или спасательных плотов.
Техническим результатом заявляемого способа является повышение эффективности поиска и спасения терпящих бедствие людей в сложных гидрометеорологических условиях - при низкой облачности, тумане, осадках, а также в период ночи, и при отсутствии у людей устройств для подачи сигналов бедствия и устройств для определения своих координат. Дополнительным техническим результатом является снижение энергозатрат при поиске.
В заявляемом способе проведения аварийно-спасательных работ используют некоторые известные существенные признаки аналогов и прототипа. В нем в предполагаемую зону бедствия направляют летательный аппарат, определяют местонахождение терпящих бедствие людей и производят спасательные работы.
Отличия заявляемого способа состоят в том, что предварительно в предполагаемую зону бедствия направляют беспилотный летательный аппарат вертолетного типа, осуществляя поиск терпящих бедствие людей пассивным сканированием акватории в различных спектральных диапазонах длин волн, преимущественно в инфракрасном и сантиметровом диапазонах, при этом полет производят в управляемом режиме, а после обнаружения терпящих бедствие людей переводят аппарат в режим зависания, отслеживая их перемещение и периодически определяя свои координаты, а спасательные средства направляют по этим координатам.
Отличия состоят также в том, что полет аппарата в управляемом режиме производят по спиральной траектории, преимущественно в виде архимедовой спирали, а сканирование осуществляют по обе стороны от текущего направления полета, задавая шаг спирали не превышающим половины ширины области сканирования.
Отличия состоят также в том, что обнаружение терпящих бедствие людей в условиях низкой облачности, тумана или в условиях ночи осуществляют путем выявления на сканируемой поверхности локальных температурных контрастов преимущественно в инфракрасном диапазоне и в сантиметровом диапазоне длин волн.
Отличия состоят также в том, что после выявления контрастов температуры прекращают полет аппарата по спиральной траектории и направляют его в зону выявленных контрастов, а при обнаружении распределенного в виде пятна характера этого контраста производят попытки установить акустический или оптический контакт, а при отсутствии таких контактов возвращают аппарат в исходную точку спиральной траектории и продолжают поиск.
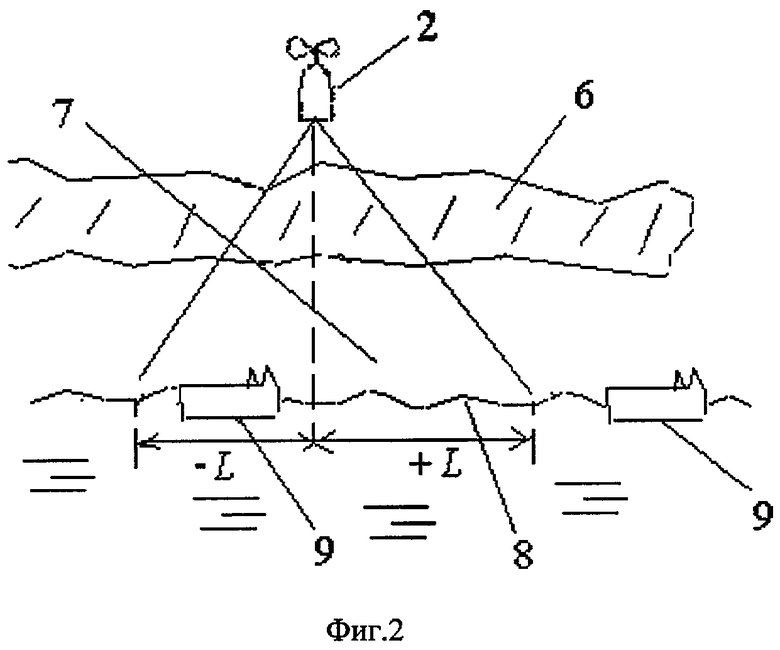
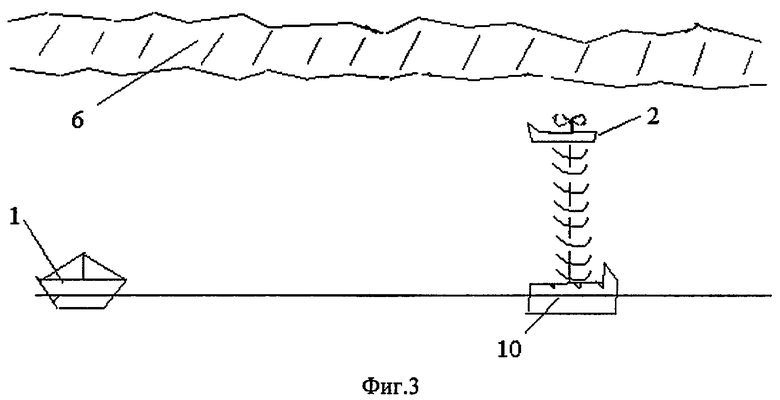
Сущность предлагаемого изобретения пояснена чертежами. На фиг.1 показана общая схема движения беспилотного летательного аппарата при поиске, на фиг.2 - схема сканирования в различных спектральных диапазонах, на фиг.3 - схема проверки выявленных контрастов температуры.
Способ реализуют следующим образом.
Из центра спасательных работ, например с базового спасательного судна 1 (фиг.1), направляют беспилотный летательный аппарат (БПЛА) вертолетного типа 2 в предполагаемую зону бедствия 3, покрытую ледяным покровом, установленную по косвенным данным, например по звонку с мобильного телефона до его ухода из зоны действия сети. Полет аппарата производят в управляемом режиме, а управление обеспечивают по радиоканалу связи аппарата 2 со спасательным судном 1. Задают режим полета по спиральной траектории 4 в виде архимедовой спирали с шагом спирали, равным h. Спираль полета включает в себя предполагаемую зону бедствия 5. Эшелон полета задают в пределах уверенной радиосвязи с центром спасательных работ, преимущественно над слоем облаков 6 (фиг.2). При полете производят сканирование акватории по обе стороны от направления полета в каждой точке траектории. Ширину области сканирования 7 задают в пределах ±L. Это сканирование в условиях низкой облачности, тумана или в ночных условиях осуществляют в пассивном режиме, т.е. не посылая импульсы запроса, преимущественно в инфракрасном и сантиметровом диапазонах длин волн, при этом задают шаг спирали h не превышающим ширины L области сканирования (фиг.2). Это обеспечивает повышение надежности поиска за счет повторения сканирования на соседнем шаге спирали. Причем сканирование производят как водной поверхности 8, так и дрейфующего льда 9.
При выявлении температурных контрастов в используемых спектральных диапазонах беспилотный летательный аппарат 2 направляют от спирали полета поперек этой спирали в зону выявленных контрастов 10 (фиг.3) и предпринимают попытки установить через БПЛА акустический контакт с выявленной зоной. Такие попытки предпринимают снижением высоты расположения БПЛА ниже границы слоя облаков 6, при этом кроме акустического контакта в соответствии с заложенной в БПЛА программой производят видеосъемку объекта в инфракрасном диапазоне (при отсутствии тумана и осадков), а при наличии освещенности и отсутствии тумана и осадков - также и в оптическом диапазоне. При наличии людей в этой зоне принимают обратные сигналы (например, крики). После возвращения БПЛА на исходную высоту полета видеоизображение и попытку акустического контакта передают на базовое спасательное судно 1, где эта информация анализируется. Температурный контраст, как известно, может проявиться не только при наличии людей, но также из-за нахождения, например на льдине, морских теплокровных животных, например тюленей. Температура тела у тюленей и у других теплокровных морских животных близка к температуре тела человека (примерно 36°С). Кроме того, температурное пятно в сплошных льдах (на фигурах показаны отдельные дрейфующие льдины) появляется при наличии полыней, поскольку температура воды обычно выше, чем температура льда и снега на льду. Во всех этих случаях обратный сигнал в виде криков о спасении будет отсутствовать, и аппарат возвращают в исходную точку спирали полета.
Физическая сущность способа состоит в следующем. Живые люди, находящиеся на льду или в воде, имеют существенно большую температуру, чем окружающая их поверхность, даже в тропических условиях. При разрешающей способности сканирования порядка ±1 метр (при сканировании в надир на малых высотах расположения сканирующего устройства), что реально у современных ИК-средств и радиояркостных термометров (сантиметровый диапазон, преимущественно в области длин волн порядка 3 см), каждый живой человек выделяется на окружающем фоне как локальное температурное пятно. Несомненно, что при сканировании поперек направления полета с изменяемым углом этого сканирования выявляемые температурные контрасты на большом удалении от маршрута полета не могут быть однозначно интерпретированы (локальные пятна сливаются в одно общее пятно, которое может быть полыньей среди льдов или стадом теплокровных животных). Это предопределяет необходимость специального подлета к выявленной зоне теплового контраста и установления источника этого контраста путем сканирования в надир и попыток установления оптического или акустического контакта.
После обнаружения потерпевших бедствие людей и установления с ними акустического (или оптического) контакта передают при возможности через БПЛА успокаивающую людей информацию и отслеживают перемещение зоны бедствия под действием ветра и волн, постоянно определяя свои координаты, например с помощью спутниковой системы навигационного обеспечения. Эти координаты БПЛА передает на спасательное судно, которое либо самостоятельно приходит на помощь, либо высылает спасательный пилотируемый вертолет. При этом энергозатраты на полет пилотируемого вертолета становятся минимальными из-за отсутствия потерь времени на поиск спасаемых людей.
Описанные отличия способа позволяют обеспечить технический результат - повышение эффективности поиска и спасения терпящих бедствие людей в сложных гидрометеорологических условиях: при низкой облачности, тумане, осадках а также в период ночи, и при отсутствии у людей устройств для подачи сигналов бедствия и устройств для определения своих координат. Дополнительным техническим результатом является снижение энергозатрат при поиске и спасании людей.
Пример реализации способа. На базовом спасательном судне размещены беспилотные летательные аппараты вертолетного типа, например российские БПЛА фирмы «ZALA» со следующими техническими характеристиками: крейсерская скорость 80 км/час, длительность полета до 6 часов, соответственно, дальность проведения поиска по спиральной траектории до 200 км с учетом времени возврата на обеспечивающее судно.
При малой высоте полета БПЛА дальность уверенной связи с обеспечивающим судном (радиовидимость) составляет 20-30 км, т.е. почти на порядок меньше, чем возможная дальность поиска. В соответствии с этим наиболее целесообразно вести поисковые работы на больших высотах, сканируя поверхность через низкую облачность, туман и в ночных условиях. Для этих работ БПЛА снабжены сканирующими системами теплолокации в инфракрасном и сантиметровом диапазонах длин волн.
Сканирование в инфракрасном диапазоне обеспечивают с помощью установки на БПЛА сканирующего ИК-радиометра с системой зеркал, повороты которых обеспечивают качание линии визирования в нужном направлении [4].
В сантиметровом диапазоне длин волн (преимущественно при длине волны 3 см) сканирование обеспечивают с помощью специальной приемной антенны, например типа фазированной решетки [5].
Как известно, в инфракрасном диапазоне длин волн тепловые контрасты могут выявляться до ±0,5°С, а в идеальных условиях и более точно. Это получается эффективным при поиске в ночных условиях, например в условиях полярной ночи. Однако эти определения очень зависят от наличия атмосферных аэрозолей (взвешенных в воздухе частиц воды). Соответственно, при сканировании через облака либо туман наблюдения в инфракрасном диапазоне становятся бесперспетивными.
В то же время теплолокация в сантиметровом диапазоне длин волн (порядка 3 см) избавлена от подобных недостатков. Сканирование тепловых объектов можно осуществлять сквозь низкую облачность и туман, а также в ночных условиях, например в условиях полярной ночи. В сантиметровом диапазоне существенно больше погрешность определения тепловых контрастов (до нескольких градусов). Однако для задачи поиска живых людей такое возрастание погрешности несущественно.
Обоснование существенности признаков. Как следует из описания, все включенные в формулу изобретения признаки являются необходимыми, а их неразрывная совокупность достаточна для достижения важного технического результата - повышения эффективности поиска и спасения терпящих бедствие людей в сложных гидрометеорологических условиях - при низкой облачности, тумане, осадках, а также в период ночи, и при отсутствии у людей устройств для подачи сигналов бедствия и устройств для определения своих координат. Дополнительным техническим результатом является снижение энергозатрат при поиске.
Обоснование изобретательского уровня. Заявляемое техническое решение было исследовано на соответствие критерию «изобретательский уровень». Для этого были проанализированы источники как в данной, так и в близких областях техники. Так, по источнику [6] был выявлен признак регистрации инфракрасного излучения для поиска пострадавших людей. Однако этот известный признак использован в иной совокупности признаков и по иному назначению, а именно - для поиска пострадавших во время пожара при задымленности атмосферы над объектом. Как было рассмотрено выше в описании заявляемого способа, такой признак не может быть эффективно использован в условиях низкой облачности, тумана или при осадках. В заявляемом способе применена иная совокупность признаков, которая позволяет проводить поиск в таких условиях.
По источнику [7] был выявлен признак установления акустического контакта с потерпевшим бедствие человеком. Однако в этом известном способе акустический контакт устанавливают по воде, при этом у терпящего бедствие человека должен быть установлен гидромаяк, которым до катастрофы снабжают этого человека. Соответственно, этот признак не порочит сходного признака в заявляемом способе, поскольку в источнике [7] он применен в иной неразрывной совокупности существенных признаков.
Таким образом, по мнению заявителя и авторов, предлагаемое техническое решение способа проведения аварийно-спасательных работ в море в своей неразрывной совокупности признаков является новым, явным образом не следует из уровня техники и позволяет получить важный технический результат - повышение эффективности поиска и спасения терпящих бедствие людей в сложных гидрометеорологических условиях: при низкой облачности, тумане, осадках, а также в период ночи, и при отсутствии у людей устройств для подачи сигналов бедствия и устройств для определения своих координат. Дополнительным техническим результатом является снижение энергозатрат при поиске.
Источники информации
1. Наставление для торговых судов по поиску и спасанию (МЕРСАР). - СПб.: Изд. АОЗТ «ЦНИИМФ»: ТОО «ТРИАС», 1995, стр.28-32.
2. Патент №93007485 RU, МПК 6 В63С 9/20. Поисково-спасательная система. Заявитель: Научно-производственное объединение "Дальняя связь", автор: Шматченко В.Ф. Опубл. 1995.03.10.
3. Наставление для торговых судов по поиску и спасанию (МЕРСАР). - СПб.: Изд. АОЗТ «ЦНИИМФ»: ТОО «ТРИАС», 1995, с.36-40, 50-54 (прототип).
4. Царев В.А., Коровин В.П. Неконтактные методы измерений в океанологии. - СПб.: Изд. РГГМУ, 2005. - С.100-105.
5. Царев В.А., Коровин В.П. Неконтактные методы измерений в океанологии. - СПб.: Изд. РГГМУ, 2005. - С.123-125.
6. Патент №2037882 RU, МПК 6 G08B 17/06. Способ поиска и обнаружения тепловых объектов и устройство для его осуществления. Заявители: Керемжанов Акимжан Фазылжанович [UA], Николенко Борис Николаевич [RU]. Авторы: они же. Опубл. 1995.06.19.
7. Патент №с2004129247 RU, МПК В63С 9/02. Способ спасения на воде и устройство для его осуществления. Заявитель: Федеральное государственное унитарное предприятие "Государственное научно-производственное предприятие "Регион" (ФГУП "ГНПП "Регион") (RU). Авторы: Костюченко Алексей Тимофеевич (RU), Пушкарев Альберт Александрович (RU), Токарев Виктор Евгеньевич (RU), Шахиджанов Евгений Сумбатович (RU). Опубл. 2006.03.20.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения объектов на земной поверхности | 2021 |
|
RU2766924C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ СУДОВ И СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2468442C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ СУДОВ И СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664919C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ТЕРПЯЩИМ БЕДСТВИЕ ЛЮДЯМ В УДАЛЕННЫХ РАЙОНАХ С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И РАКЕТНЫЙ КОМПЛЕКС ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ | 2016 |
|
RU2651350C1 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОИСКА ЛЮДЕЙ, ТЕРПЯЩИХ ИЛИ ПОТЕРПЕВШИХ БЕДСТВИЕ НА МОРЕ | 2022 |
|
RU2814981C2 |
| СПОСОБ ЭКСТРЕННОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ОБЪЕКТАМ СПАСЕНИЯ, ПОПАВШИМ В ЭКСТРЕМАЛЬНЫЕ УСЛОВИЯ И ТЕРПЯЩИМ БЕДСТВИЕ В УДАЛЕННЫХ БЕЗЛЮДНЫХ РАЙОНАХ ЗЕМНОГО ШАРА С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И АЭРОБАЛЛИСТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2076759C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ РАЗЛИВА НЕФТЯНЫХ ЗАГРЯЗНЕНИЙ В МОРЕ | 2008 |
|
RU2411450C2 |
Изобретение может быть использовано для поиска и спасения людей в сложных гидрометеорологических условиях, а также в условиях отсутствия прямой связи со спасателями. Способ основан на том, что в зону бедствия направляют беспилотный летательный аппарат вертолетного типа, осуществляя поиск терпящих бедствие людей пассивным сканированием акватории в различных спектральных диапазонах длин волн, преимущественно в инфракрасном и сантиметровом диапазонах. Полет производят в управляемом режиме, а после обнаружения терпящих бедствие людей переводят аппарат в режим зависания, отслеживая их перемещение и периодически определяя свои координаты, а спасательные средства направляют по этим координатам. Полет аппарата в управляемом режиме производят по спиральной траектории, преимущественно в виде архимедовой спирали. Сканирование осуществляют по обе стороны от текущего направления полета, задавая шаг спирали, не превышающий половины ширины области сканирования. Обнаруживают людей путем выявления на сканируемой поверхности локальных температурных контрастов преимущественно в инфракрасном диапазоне и в сантиметровом диапазоне длин волн. Затем прекращают полет аппарата по спиральной траектории, направляют его в зону выявленных контрастов. При обнаружении распределенного в виде пятна характера контраста температуры производят попытки установить акустический или оптический контакт, а при отсутствии таких контактов возвращают аппарат в исходную точку спиральной траектории и продолжают поиск. Повышается эффективность поиска и спасения терпящих бедствие людей в сложных гидрометеорологических условиях при условии отсутствия у людей устройств для подачи сигналов бедствия и определения своих координат. 3 з.п. ф-лы, 3 ил.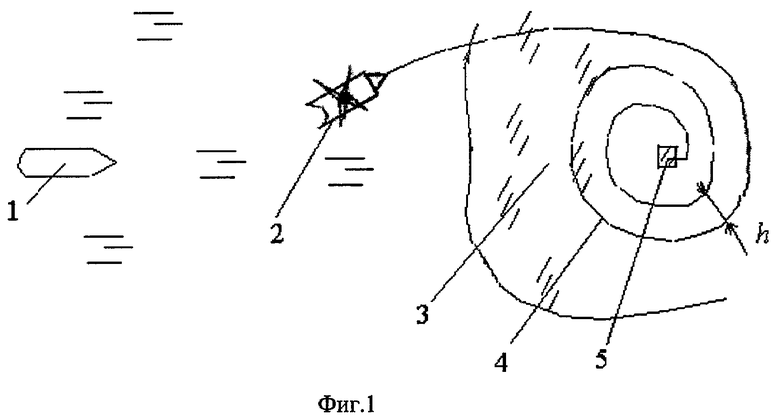
1. Способ проведения аварийно-спасательных работ в море, при котором в предполагаемую зону бедствия направляют летательный аппарат, определяют местонахождение терпящих бедствие людей и производят спасательные работы, отличающийся тем, что предварительно в предполагаемую зону бедствия направляют беспилотный летательный аппарат вертолетного типа, осуществляя поиск терпящих бедствие людей пассивным сканированием акватории в различных спектральных диапазонах длин волн, преимущественно в инфракрасном и сантиметровом диапазонах, при этом полет производят в управляемом режиме, а после обнаружения терпящих бедствие людей переводят аппарат в режим зависания, отслеживая их перемещение и периодически определяя свои координаты, а спасательные средства направляют по этим координатам.
2. Способ проведения аварийно-спасательных работ в море по п.1, отличающийся тем, что полет аппарата в управляемом режиме производят по спиральной траектории преимущественно в виде архимедовой спирали, а сканирование осуществляют по обе стороны от текущего направления полета, задавая шаг спирали не превышающим половины ширины области сканирования.
3. Способ проведения аварийно-спасательных работ в море по п.1, отличающийся тем, что обнаружение терпящих бедствие людей в условиях низкой облачности, тумана, осадков или в условиях ночи осуществляют путем выявления на сканируемой поверхности локальных температурных контрастов преимущественно в инфракрасном диапазоне и в сантиметровом диапазоне длин волн.
4. Способ проведения аварийно-спасательных работ в море по п.1, отличающийся тем, что после выявления контрастов температуры прекращают полет аппарата по спиральной траектории и направляют его в зону выявленных контрастов, а при обнаружении распределенного в виде пятна характера этого контраста производят попытки установить акустический или оптический контакт, а при отсутствии таких контактов возвращают аппарат в исходную точку спиральной траектории и продолжают поиск.
| Наставление для торговых судов по поиску и спасению (МЕРСАР) | |||
| - СПб: изд | |||
| АОЗТ «ЦНИИМФ»: ТОО «ТРИАС», 1995, с.36-40, 50-54 | |||
| JP 2002037187 А, 06.02.2002 | |||
| СПОСОБ СПАСЕНИЯ НА ВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2288132C2 |
| JP 1176965 А, 13.07.1989 | |||
| NL 8503106 А, 01.06.1987. | |||

