Изобретение относится к области жизненных потребностей человека, а более конкретно к способам спасения жизни членов экипажей и пассажиров кораблей, судов и летательных аппаратов, терпящих бедствие на море и на земле, и может быть использовано для поиска этих людей, воспользовавшихся коллективными и индивидуальными средствами спасения, но имеющих возможность подавать сигналы бедствия только пиротехническими средствами.
Известен способ поиска и спасения терпящих бедствие людей (1. Наставление для торговых судов по поиску и спасанию (МЕРСАР). - СПб. Изд. АОЗТ «ЦНИИМФ»: ТОО «ТРИАС», 1995, стр. 28-32), при котором выявляют сигнал бедствия (SOS), посылаемый с помощью радиопередатчика, например, с потерпевшего аварию судна, определяют координаты или пеленг источника сигнала и направляют к этому источнику сигнала спасательные средства.
Этот способ широко применяется на море, однако он не может быть использован в случае подачи сигнала бедствия с помощью пиротехнических средств.
Известен также способ проведения аварийно-спасательных работ, терпящих бедствие на море людей (2. Наставление для торговых судов по поиску и спасанию (МЕРСАР). - СПб. Изд. АОЗТ «ЦНИИМФ»: ТОО «ТРИАС», 1995, с. 36-40, 50-54), при котором в предполагаемую зону бедствия направляют пилотируемый вертолет, осуществляя поиск терпящих бедствие людей путем визуального наблюдения членами экипажа.
Однако этот способ не обеспечивает обнаружение экипажем вертолета сигналов пиротехнических источников излучения, оказавшихся вне зон визуального обзора воздушного пространства и земной поверхности.
Известен способ проведения аварийно-спасательных работ в море (3. Патент РФ на изобретение №2421370, М. кл. В63С 9/00, В64С 9/02, G01S 5/18, А62В 99/00, опубл. 20.06. 2011 г,), выбранный в качестве прототипа, основанный на том, что в зону бедствия направляют беспилотный летательный аппарат вертолетного типа, осуществляя поиск терпящих бедствие людей пассивным сканированием акватории в различных спектральных диапазонах длин волн, преимущественно в инфракрасном и сантиметровом диапазонах. Полет производят в управляемом режиме, а после обнаружения терпящих бедствие людей переводят аппарат в режим зависания, отслеживая их перемещение и периодически определяя свои координаты, а спасательные средства направляют по этим координатам. Полет аппарата в управляемом режиме производят по спиральной траектории, преимущественно в виде архимедовой спирали. Сканирование осуществляют по обе стороны от текущего направления полета, задавая шаг спирали, не превышающий половины ширины области сканирования. Обнаруживают людей путем выявления на сканируемой поверхности локальных температурных контрастов преимущественно в инфракрасном диапазоне и в сантиметровом диапазоне длин волн. Затем прекращают полет аппарата по спиральной траектории, направляют его в зону выявленных контрастов. При обнаружении распределенного в виде пятна контраста температуры производят попытки установить акустический или оптический контакт, а при отсутствии таких контактов возвращают аппарат в исходную точку спиральной траектории и продолжают поиск.
Данный способ позволяет осуществлять поиск и спасение терпящих бедствие людей в сложных гидрометеорологических условиях при условии отсутствия у людей устройств для подачи сигналов бедствия и определения своих координат.
Однако, этот способ не обеспечивает всенаправленное и помехоустойчивое обнаружение излучающих пиротехнических средств сигнализации объектов поиска, а также не может быть использован для обнаружения, распознавания и определения координат на больших дальностях до указанных объектов поиска.
Вышеуказанный способ не предназначен для обнаружения сигналов оптического диапазона, подаваемых находящимися вблизи летательного аппарата объектами поиска, но оказавшимися в это время за пределами полосы обзора земной поверхности по обе стороны от текущего направления полета.
Данный способ может быть применен для поиска сигналов преимущественно в ИК-диапазоне, имеющем большое количество помех искусственного и естественного происхождения, что приведет к появлению соответствующего количества ложных объектов поиска.
Кроме того, известный способ не может быть использован для обнаружения, распознавания и определения координат объекта поиска, находящегося на дальностях, превышающих дальность выявления на сканируемой поверхности локальных температурных контрастов преимущественно в инфракрасном диапазоне и в сантиметровом диапазоне длин волн.
В рассматриваемом способе время поиска объекта включает в себя время подлета к выявленной зоне теплового контраста и время для проведения идентификации объекта путем сканирования в надир.
С учетом вышеизложенного, проблемой рассмотренного способа является невозможность всенаправленного и помехоустойчивого обнаружения объектов поиска, подающих пиротехнические сигналы, а также невозможность обнаружения, распознавания и определения координат объектов поиска, находящихся на больших дальностях и за меньшее время.
Техническим результатом предлагаемого изобретения является обеспечение всенаправленного и помехоустойчивого обнаружения объектов поиска, в том числе находящихся на больших дальностях, по излучению их пиротехнических средств сигнализации, при одновременном сокращении времени поиска.
Достижение указанного технического результата обеспечивается в предлагаемом способе обнаружения объектов на земной поверхности, при котором летательный аппарат направляют в зону поиска, производят пассивное сканирование земной поверхности в различных спектральных диапазонах длин волн при осуществлении полета летательного аппарата в управляемом режиме в полосе обзора до обнаружения локальных оптических контрастов, после чего осуществляют движение летательного аппарата в зону выявления локальных оптических контрастов и по выявленным локальным оптическим контрастам производят распознавание заданного объекта поиска с уточнением его координат, согласно изобретению в зоне поиска летательного аппарата дополнительно в автоматическом режиме осуществляют обзор воздушного пространства и земной поверхности сферическим полем зрения для обнаружения в ультрафиолетовом диапазоне длин волн 190-290 нм излучения приведенного в действие пиротехнического средства сигнализации объекта поиска и в момент обнаружения упомянутого пиротехнического средства сигнализации измеряют и фиксируют значения его пеленга, а также времени обнаружения, после этого продолжают полет летательного аппарата с неизменной скоростью по траектории, на которой удерживают траверз на источник излучения путем непрерывного изменения курса, до момента прекращения излучения, фиксируют в данный момент значение времени и пеленг упомянутого пиротехнического средства сигнализации, после чего продолжают движение летательного аппарата по направлению пеленга, зафиксированного в момент прекращения излучения пиротехнического средства сигнализации, до момента обнаружения контрастного в видимом или ИК-диапазоне длин волн объекта поиска, осуществляемого путем вычисления координат точки проекции обнаруженного пиротехнического средства сигнализации на земную поверхность и последующего наведения поля зрения с изменяемым оптическим увеличением, центром которого выбирают упомянутую точку на земной поверхности.
Возможность достижения указанного технического результата указанными выше отличительными признаками предлагаемого изобретения можно пояснить следующим образом.
Существуют ситуации, в которых объекты поиска вынуждены подавать сигналы бедствия, сигналы обращения внимания или сигналы в специальных целях только с помощью пиротехнических сигнальных средств. Примерами таких ситуаций могут быть:
- неисправность или отсутствие аварийной радиостанции;
- необходимость соблюдения режима радиомолчания в интересах скрытия своего местонахождения от недружественных поисковых сил.
Пиротехнические сигналы создаются как в результате применения светодымовых средств (фальшфаейры, сигнальные патроны «день-ночь»), находящихся на объекте поиска (объект поиска может находиться на воде, на суше, на льду) или вблизи от объекта на земной поверхности, так и в результате применения запускаемых в воздух сигнальных ракет, парашютных сигнальных ракет, сигнальных звездочек, комбинированных сигнальных патронов с подводных лодок.
В воздух пиротехнические средства запускаются по траектории, близкой к вертикальной. Проекции координат на земную поверхность применяемых пиротехнических средств практически совпадают с координатами соответствующих объектов поиска.
Процесс горения пламенных пиротехнических сигнальных средств сопровождается излучением в ИК и УФ-диапазоне.
Отличия заявляемого способа состоят в том, что обзор воздушного пространства и земной поверхности для обнаружения излучения приведенного в действие пиротехнического средства сигнализации объекта поиска осуществляют сферическим полем зрения. Указанное не сканирующее сферическое поле зрения обеспечивает мгновенное обнаружение излучения и непрерывное измерение пеленга источника излучения в пределах пространства, ограниченного поверхностью условной сферы, центром которой является летательный аппарат, а радиус равен энергетической дальности обнаружения источника излучения из центра сферы. Предлагаемый обзор воздушного пространства и земной поверхности позволяет определять предполагаемые координаты объекта поиска по излучению его пиротехнического средства сигнализации и после этого прекращать дальнейшее пассивное сканирование земной поверхности в полосе обзора с целью обнаружения локальных оптических контрастов, сократив при этом время поиска объекта. При этом обнаружение и распознавание объектов поиска осуществляется на дальностях, соответствующих используемому оптическому каналу, имеющему объектив с многократным увеличением, что позволяет сократить общее время поиска объекта на время подлета к предполагаемому объекту поиска и время его распознавания путем сканирования в надир.
Сущность предлагаемого изобретения поясняется чертежами.
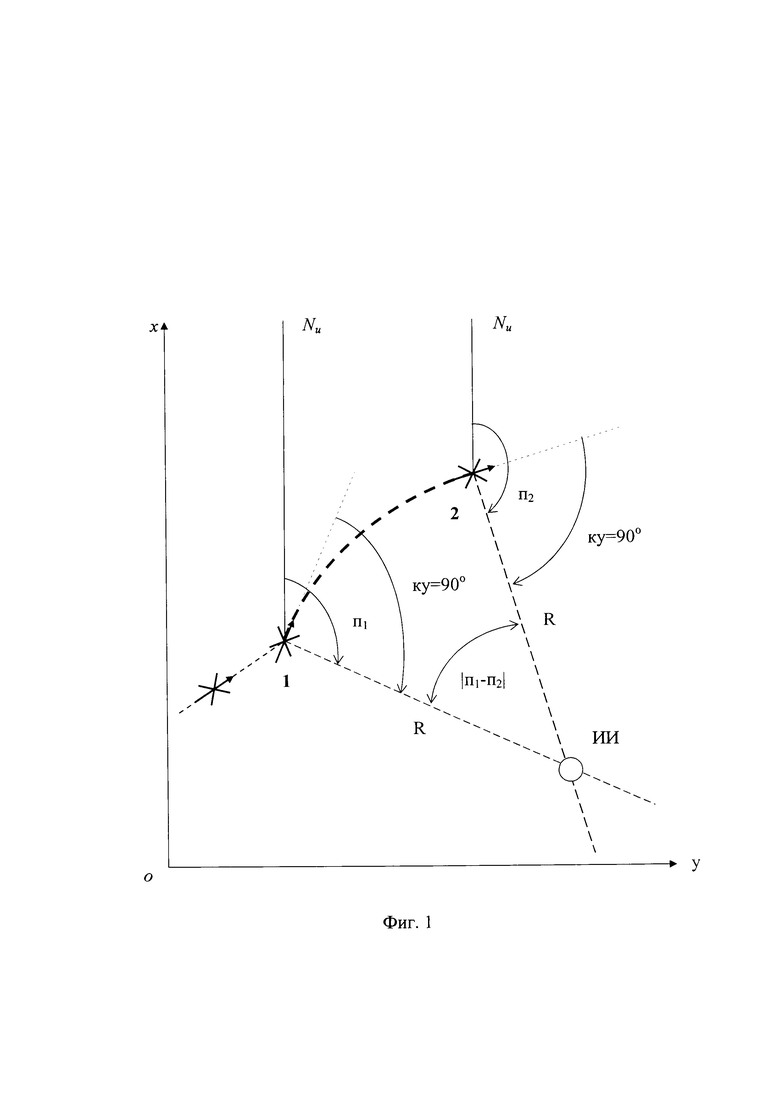
На фиг. 1 показана общая схема движения летательного аппарата при поиске и определении координат излучающего пиротехнического средства. В точке (1) схемы движения на борту ЛА обнаруживают появление излучения ультрафиолетового спектра (190-290) нм, определяют и запоминают пеленг (П1 на источник излучения (ИИ), устанавливают режим полета ЛА по дуге окружности (1-2) с постоянной скоростью Vла и постоянным курсовым углом (ку=90°) источника излучения. В момент начала полета ЛА по дуге окружности (1-2) в указанном выше режиме в точке 1 фиксируют время начала полета и запоминают соответствующее значение пеленга П1 на источник излучения. Прекращение излучения отслеживаемого источника отмечают в точке 2 маршрута полета ЛА моментом окончания времени полета ЛА по дуге окружности (1-2) и соответствующим значением пеленга П2. Расстояние от точки 1 до ИИ равно расстоянию от точки 2 до ИИ.
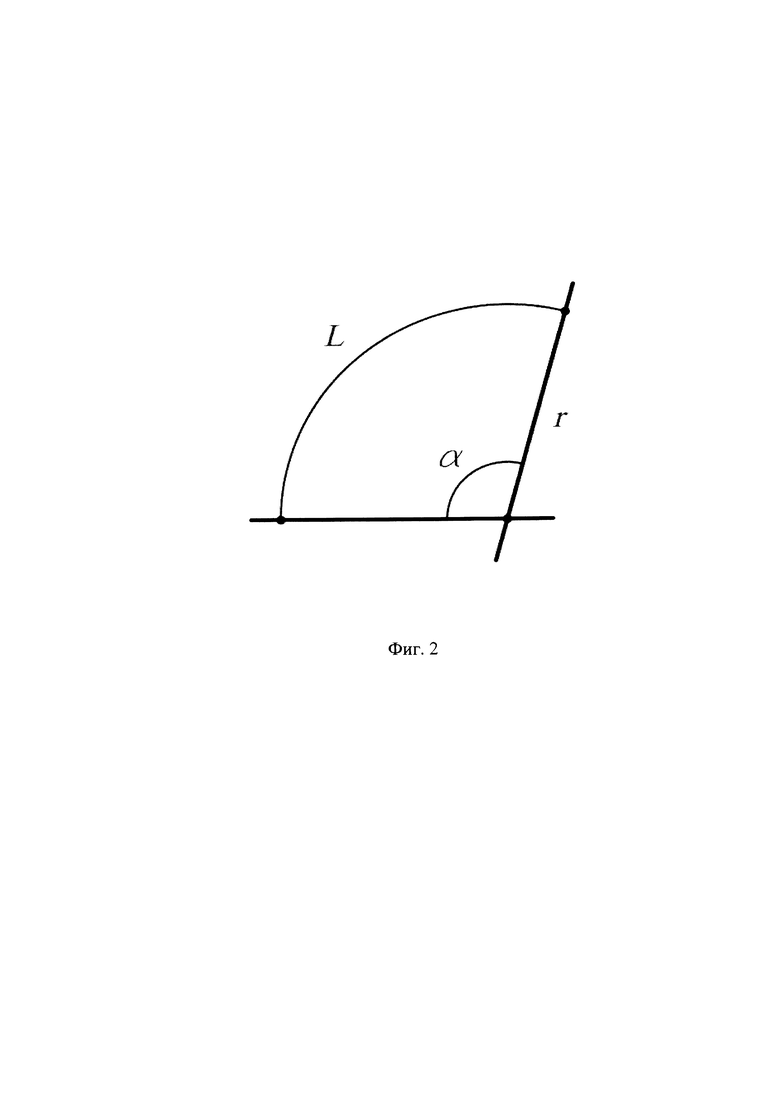
На фиг. 2 показана часть фиг. 1, которая образует окружность, точки которой равноудалены, называется дугой. Если из точки центра окружности, провести лучи в точки, совпадающие с концами дуги, будет образован ее центральный угол.
Расчет длины дуги производится по следующей формуле:
L=πrα/180°, тогда r=L/180°πα,
где:
r- радиус окружности (он же и вычисленная дальность на земной поверхности до точки проекции источника излучения);
α - угол (разность пеленгов на источник излучения из точки 1 и точки 2);
L - длина дуги;
π - 3.14.
Длина дуги (пройденное расстояние) будет вычисляться как произведение постоянной скорости ЛА и времени полета по дуге L.
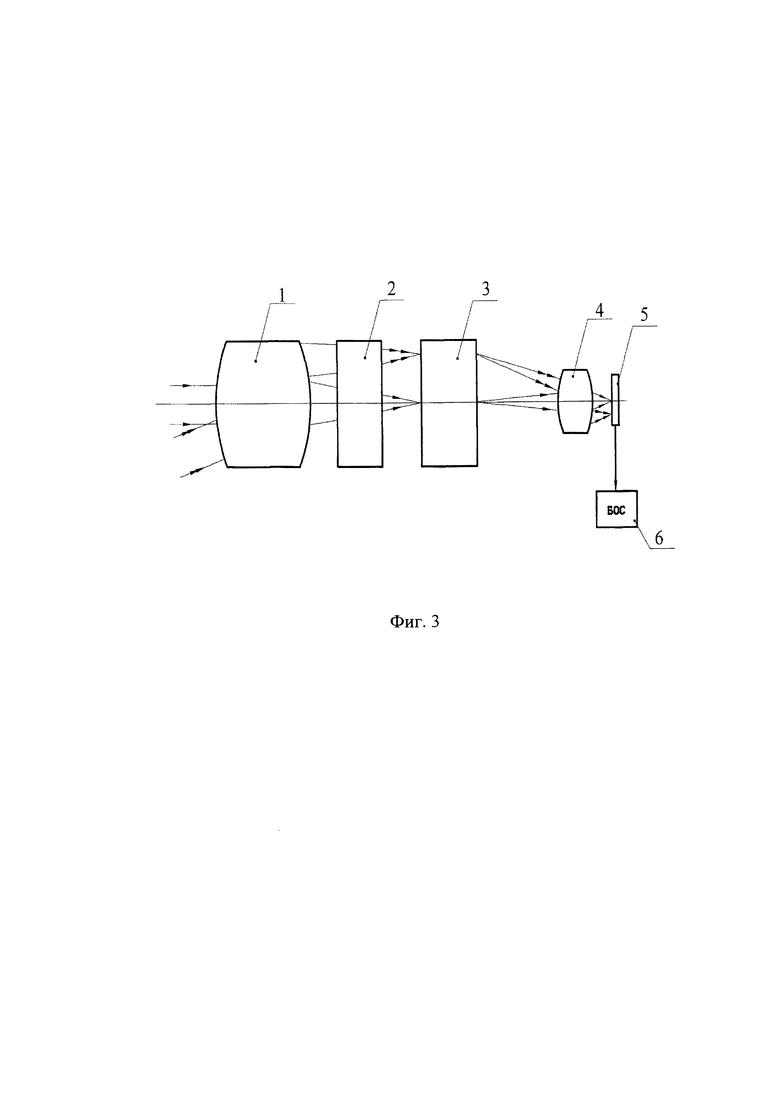
На фиг. 3 показана оптическая схема ультрафиолетового пеленгатора (УФП), реализующего обнаружение и определение угловых координат (пеленга) источника ультрафиолетового излучения, который содержит взаимосвязанные объектив 1, спектральный фильтр 2, оптико-электронный прибор (ОЭП) 3, проекционный объектив 4, ПЗС-матрицу 5, блок 6 обработки сигнала.
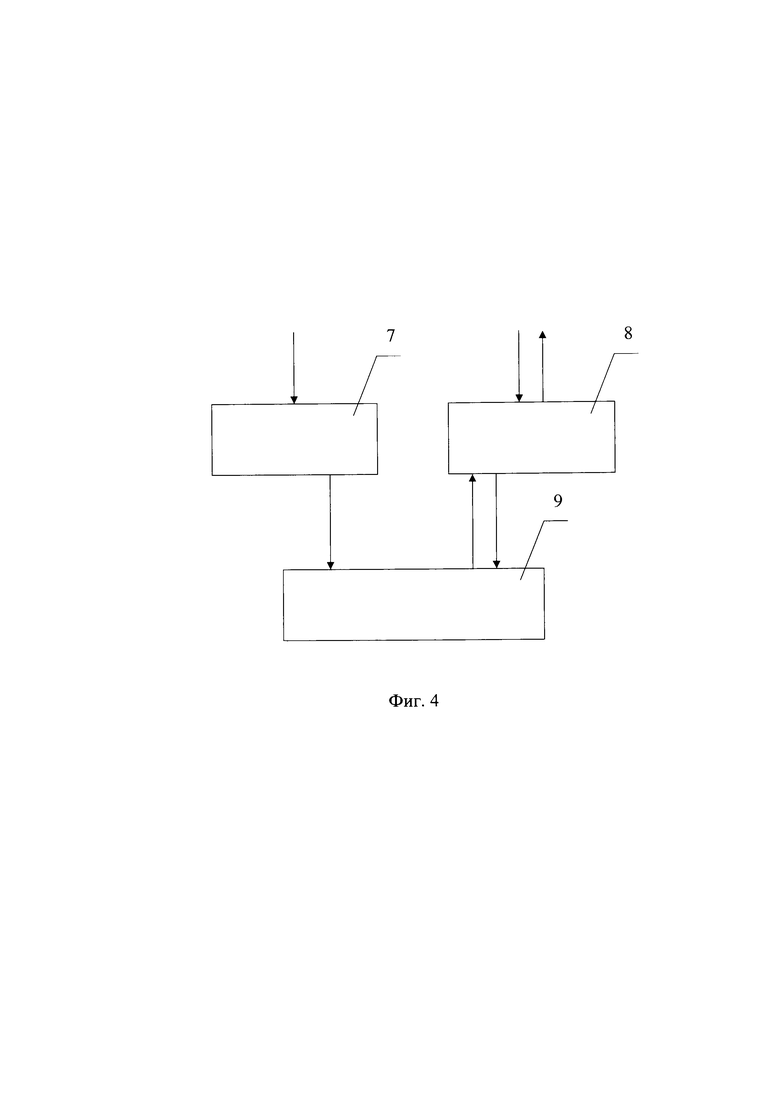
На фиг. 4 показана структура устройства для реализации предлагаемого способа в целом. В состав приведенного на фиг.4 устройства должны входить установленные на летательном аппарате вертолетного типа и взаимодействующие между собой следующие системы:
7 - ультрафиолетовый пеленгатор (УФП);
8 - оптико-электронная станция (ОЭС);
9 - комплекс бортового оборудования (КБО).
Предлагаемый способ в целом реализуется следующим образом. В предполагаемую зону поиска заданного объекта на земной поверхности направляют летательный аппарат (ЛА) вертолетного типа, пилотируемый экипажем или операторами наземного (корабельного) пункта управления с использованием при необходимости вспомогательного вертолета-ретранслятора. Поиск объекта с помощью ЛА производят различными способами, просматривая при этом земную поверхность по обе стороны от направления полета в пределах предельно возможных размеров зон обзора в инфракрасном и видимом диапазонах длин волн. Кроме того, одновременно производят обзор воздушного пространства и земной поверхности сферическим полем зрения для обнаружения факта появления излучения в «солнечно-слепой» области ультрафиолетового спектра (190-290) нм. После обнаружения излучения определяют и отслеживают пеленг на источник обнаруженного излучения, устанавливают режим полета ЛА по дуге окружности с постоянной скоростью Vла и постоянным курсовым углом источника излучения, соответствующим 90 градусам, который удерживают непрерывным изменением курса ЛА. В момент установки заданного режима полета ЛА в точке 1 фиксируют время начала полета Т1и запоминают соответствующее значение пеленга П1 на источник излучения. Прекращение излучения отслеживаемого источника отмечают в точке 2 маршрута полета ЛА моментом времени Т2 и соответствующим значением пеленга П2. Предполагаемое расстояние до объекта поиска определяют, используя справочную формулу для расчета длины дуги. Далее изменяют направление полета ЛА в сторону предполагаемого местонахождения объекта поиска, установив курс, равный измеренному ранее пеленгу П2, после чего продолжают движение летательного аппарата по направлению измеренного пеленга, зафиксированного в момент прекращения излучения пиротехнического средства сигнализации, до момента обнаружения с помощью ОЭС 8 контрастного в видимом или ИК-диапазоне длин волн объекта поиска, осуществляемого путем вычисления координат (дальность и пеленг) точки проекции обнаруженного пиротехнического средства сигнализации на земную поверхность и последующего наведения поля зрения ОЭС 8 с изменяемым оптическим увеличением, центром которого выбирают упомянутую точку на земной поверхности.
Операции обнаружения и определения пеленга пиротехнического источника излучения в предлагаемом способе могут быть реализованы, например, с применением УФП, оптическая схема которого приведена на фиг. 3, а построение и функционирование изложено в (4. Патент РФ на полезную модель №108151, М.кл. G01S 3/78, опубл. 13.04.2011 г.)
На фиг. 3 показан приемный объектив 1 с широким полем зрения, принимающий содержащее УФ составляющую излучение от удаленного источника и направляющий его в спектральный фильтр 2, который пропускает излучение в «солнечно-слепой» области спектра и подавляет излучение вне этой области. Чувствительный к УФ излучению фотокатод ЭОП 3 собирает прошедшее через спектральный фильтр 2 УФ излучение в точке, координаты которой соответствуют угловому положению источника УФ излучения в поле зрения УФП. Электроны, выбитые из фотокатода ЭОП 3 под действием УФ излучения, создают на выходном люминесцентном экране ЭОП 3 изображение источника УФ излучения в видимой области спектра. Проекционный объектив 4 переносит это изображение с выходного экрана ЭОП 3 в плоскость ПЗС-матрицы 5, в результате чего на соответствующем пикселе ПЗС-матрицы 5 вырабатывается электрический сигнал, который передается в блок обработки сигнала 6. По координатам засвеченного пикселя в блоке обработки сигнала 6 вычисляются угловые координаты (пеленг) обнаруженного источника УФ излучения. Положение источника излучения в пространстве изображается на фотокатоде и на выходном люминесцентном экране ЭОП 3 в одном и том же масштабе. Изображение с экрана ЭОП 3 переносится проекционным объективом 4 в плоскость ПС3-матрицы 5 с уменьшением. Кратность уменьшения зависит от соотношения размеров фотокатода ЭОП 3 и ПЗС-матрицы фотоприемника 5. Таким образом, благодаря оптическому переносу с помощью проекционного объектива 4 изображения пространства с источником экрана ЭОП 3 на ПЗС-матрицу 5, имеющую ограниченные размеры, можно использовать в устройстве ЭОП с увеличенными размерами фотокатода, что позволяет расширить угловое поле зрения устройства до 90°×90° без снижения обнаружительной способности устройства.
Операция наведения поля зрения ОЭС 8 с изменяемым оптическим увеличением, центром которого выбирается точка проекции обнаруженного излучающего пиротехнического средства сигнализации на земную поверхность, в предлагаемом способе может быть реализована, например, с применением ОЭС 8, технический проект которой (5. Станция оптико-электронная гиростабилизированная, шифр «МИНОГА-ОЭС», Технический проект, Пояснительная записка, 1177.00000000ПЗ, 2018 г.) разработан в АО «ПО «УОМЗ» для создаваемого вертолета. Одним из назначений указанной ОЭС 8 является обеспечение поиска и обнаружение на земной поверхности заданных объектов и средств сигнализации оптического диапазона.
ОЭС вертолета формирует и выдает в комплекс бортового оборудовании (КБО) для визуализации на многофункциональном индикаторе изображение фоно-целевой обстановки в зоне обзора земной поверхности, получаемое оптическими каналами.
В состав ОЭС 8 входит гиростабилизированная платформа с установленными на ней тепловизионным каналом среднего ИК-диапазона (длина волны 3…5 мкм), ИК-каналом ближнего диапазона (длина волны 0,9…1,7 мкм), телевизионным цветным каналом. Каждый из перечисленных каналов имеет режим трансфокации, в котором его поле зрения в режиме ручного управления может плавно изменяться. На платформе ОЭС 8 установлен также лазерный дальномер (ЛД). Все каналы и ЛД, установленные на платформе, имеют одну общую линию визирования (ЛВ). В ОЭС 8 предусмотрен режим «Сканирование», который является одним из вариантов управления ЛВ. КБО рассчитывает в указанном режиме угловые скорости перемещения ЛВ ОЭС таким образом, чтобы ЛВ перемещалась с заданной скоростью, обеспечивая в заданной зоне обзор поверхности без пропусков.
Обнаружение, распознавание и определение координат объекта поиска в зоне обзора по изображению на многофункциональном индикаторе производит член экипажа пилотируемого летательного аппарата или оператор наземного пункта управления беспилотным летательным аппаратом.
Изобретение относится к области жизненных потребностей человека, конкретно к способам спасения жизни членов экипажей и пассажиров судов и ЛА, терпящих бедствие на море и на земле и имеющих возможность подавать сигналы бедствия только пиротехническими средствами. ЛА направляют в зону поиска. Осуществляют обзор воздушного пространства и земной поверхности сферическим полем зрения для обнаружения в ультрафиолетовом диапазоне длин волн 190-290 нм излучения приведенного в действие пиротехнического средства сигнализации. В момент обнаружения пиротехнического средства измеряют и фиксируют значения его пеленга, времени обнаружения. Продолжают полет с неизменной скоростью по траектории, на которой удерживают траверз на источник излучения путем непрерывного изменения курса до момента прекращения излучения. Фиксируют значение времени и пеленг пиротехнического средства. Продолжают движение ЛА по направлению пеленга, зафиксированного в момент прекращения излучения пиротехнического средства, до момента обнаружения контрастного в видимом или ИК-диапазоне длин волн объекта поиска. Повышается эффективность и сокращается время поиска. 4 ил.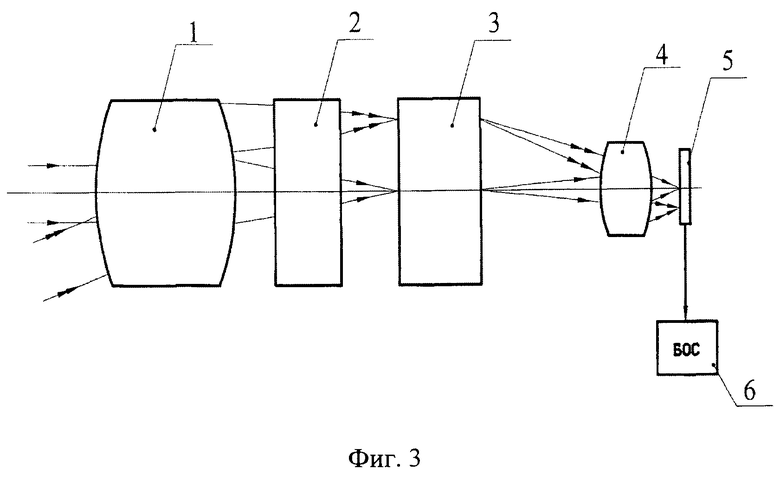
Способ обнаружения объектов на земной поверхности, при котором летательный аппарат направляют в зону поиска, производят пассивное сканирование земной поверхности в различных спектральных диапазонах длин волн при осуществлении полета летательного аппарата в управляемом режиме в полосе обзора до обнаружения локальных оптических контрастов, после чего осуществляют движение летательного аппарата в зону выявления локальных оптических контрастов и по выявленным локальным оптическим контрастам производят распознавание заданного объекта поиска с уточнением его координат, отличающийся тем, что в зоне поиска летательного аппарата дополнительно в автоматическом режиме осуществляют обзор воздушного пространства и земной поверхности сферическим полем зрения для обнаружения в ультрафиолетовом диапазоне длин волн 190-290 нм излучения приведенного в действие пиротехнического средства сигнализации объекта поиска и в момент обнаружения упомянутого пиротехнического средства сигнализации измеряют и фиксируют значения его пеленга, а также времени обнаружения, после этого продолжают полет летательного аппарата с неизменной скоростью по траектории, на которой удерживают траверз на источник излучения путем непрерывного изменения курса, до момента прекращения излучения, фиксируют в данный момент значение времени и пеленг упомянутого пиротехнического средства сигнализации, после чего продолжают движение летательного аппарата по направлению пеленга, зафиксированного в момент прекращения излучения пиротехнического средства сигнализации, до момента обнаружения контрастного в видимом или ИК-диапазоне длин волн объекта поиска, осуществляемого путем вычисления координат точки проекции обнаруженного пиротехнического средства сигнализации на земную поверхность и последующего наведения поля зрения с изменяемым оптическим увеличением, центром которого выбирают упомянутую точку на земной поверхности.
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2010 |
|
RU2439603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПОСЛЕ ЕГО КРУШЕНИЯ В РЕЗУЛЬТАТЕ АВАРИИ | 2015 |
|
RU2587210C1 |
| WO 2016142549 A1, 15.09.2016 | |||
| WO 2018176152 A1, 04.10.2018. | |||

