Настоящее изобретение относится к области техники подводного плавания, техники подводных исследований и может быть использовано при создании техники океанологических гидрофизических автономных и привязных подводных аппаратов, а также подводных аппаратов любого назначения.
Важнейшим проектируемым качеством самоходных управляемых подводных аппаратов, как и любых видов транспорта, является их управляемость, т.е. способность средств управления изменять траекторию движения согласно заданной программы или адаптивно отслеживать рельеф грунта, двигаясь эквидистантно над ним. Как правило, все подводные самоходные автономные и привязные подводные аппараты - транспортные средства, маневрируя в вертикальной плоскости, совершают движения по ступенчатой траектории, сохраняя нулевой дифферент, т.е. сохраняя продольную ось в горизонтальном положении, поскольку заранее запроектирована высокая остойчивость - большая метацентрическая высота. Однако управлять дифферентом весьма желательно как во время движения, так и в неподвижном положении, как с точки зрения минимизации энергозатрат на движение, так и сточки зрения манипуляции внешними устройствами и пользования измерительной аппаратурой.
Известен способ обеспечения управляемости дифферентом и креном [1], где управляемость обеспечивают за счет смещения центра величины плавучести - легковесной жидкости с легковесным наполнителем, деформируя, упругоэластичную емкость, в которую заключают плавучесть, создавая, тем самым, дифферентующий или кренящий момент, что позволяет управлять аппаратом по дифференту и крену.
Известный способ ограничен малыми величинами перемещения плавучести в пределах деформации упругой емкости и, следовательно, малыми пределами управляемости, кроме того, требует серьезных исполнительных устройств для оперативного применения в процессе активного управления движением.
Известен способ обеспечения управляемости подводного аппарата [2], включающий разделение конструкции аппарата на две сборки: одну из них строительную, фиксированную относительно вектора упора двигателей и связанной системы координат - главных строительных осей подводного аппарата, и вторую - управляющую дифферентом, уравновешенные в воде блоками плавучести.
Такой способ имеет те же существенные недостатки - ограниченность малыми пределами управляемости, необходимость использования искусственно привлекаемых элементов (балласт, плавучесть), которые снижают транспортную эффективность подводного аппарата.
Техническим результатом, ожидаемым от использования предлагаемого изобретения, является устранение указанных недостатков - методическое устранение ограничений пределов управляемости при минимальных управляющих усилиях.
Указанный результат достигается тем, что в известном способе обеспечения управляемости подводного аппарата, в котором разделяют элементы конструкции на две сборки: одну из них строительную, фиксированную относительно вектора упора двигателей и связанной системы координат - главных строительных осей подводного аппарата, и вторую - управляющую дифферентом, каждую сборку уравновешивают в воде плавучестями, совмещая в строительной сборке центр тяжести с центром величины, а в управляющей дифферентом сборке обеспечивают диаметральное разнесение центров тяжести и величины относительно оси дифферентования - оси взаимного вращения сборок, которую ориентируют параллельно главной поперечной оси аппарата, при этом ось взаимного вращения размещают в подшипниках строительной сборки и соединяют ее с приводом взаимного вращения сборок, обеспечивающим дифферентующий момент в пределах:
M=L×p,
где L - метацентрическая высота - расстояние между центром тяжести и центром величины сборки управляющей дифферентом;
р - вес в воде сборки управляющей дифферентом.
Возможен способ, в котором сборки соединяют карданным шарниром со степенями свободы по дифференту и крену, снабжая независимым приводом для каждой степени.
Сущность предлагаемого изобретения в том, что, компонуя, согласно способу, часть конструктивных элементов и уравновешивая их плавучестями, в отельную сборку - строительную, в которой, совмещая центр тяжести и центр величины, поучают конструкцию невесомую и индифферентную в воде относительно поля сил тяжести. Она может свободно занимать любое пространственное положение. Тогда как, управляющая дифферентом сборка, у которой ее центр тяжести и центр величины разнесены относительно оси взаимного вращения, имея максимальную метацентрическую величину и максимальный метацентрический момент, является предельно остойчивой. Соединяя приводом вращения обе сборки, обеспечивают возможностью вращения их относительно друг друга около оси взаимного вращения - дифферентной оси на задаваемый угол дифферента. Так как управляющая дифферентом сборка остойчива, то она фиксирована в пространстве относительно вертикали метацентрическим моментом, а строительная индифферентна, то она - строительная и будет вращаться относительно фиксированной сборки. Поскольку главные строительные оси, а именно: продольная ось, вдоль которой ориентирован вектор упора, фиксированы на строительной сборке, то и продольная ось и вектор упора будет вращаться в вертикальной плоскости пространства на задаваемый приводом угол дифферента. Достижение необходимой величины угла дифферента не зависит от величины прилагаемого для вращения момента, который, однако, не должен превышать величину метацентрического неподвижной сборки. В противном случае управляющая дифферентом сборка и подводный аппарат придут в состояние затухающих колебаний.
При этом можно одновременно вращать как относительно поперечной, управляя по дифференту, так относительно продольной оси - управляя по крену, используя вместо оси взаимного вращения, карданный шарнир, снабдив его двумя независимыми приводами. На практике управление креном требуется в основном как подстройка угловых координат.
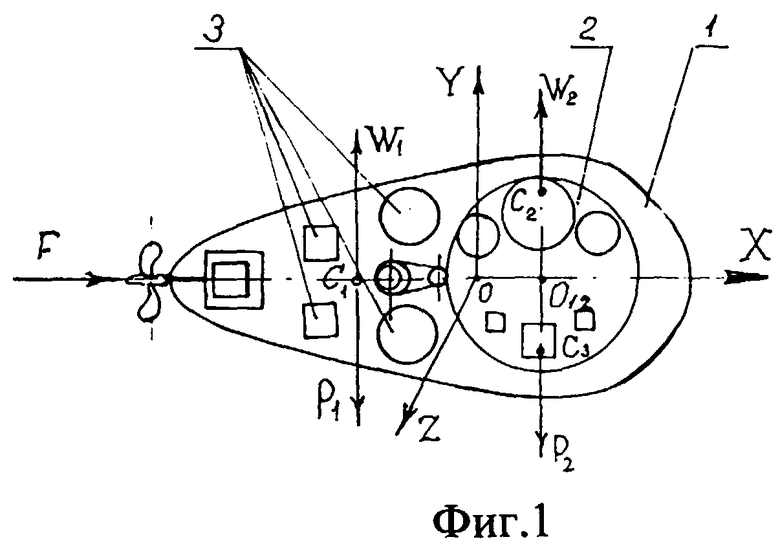
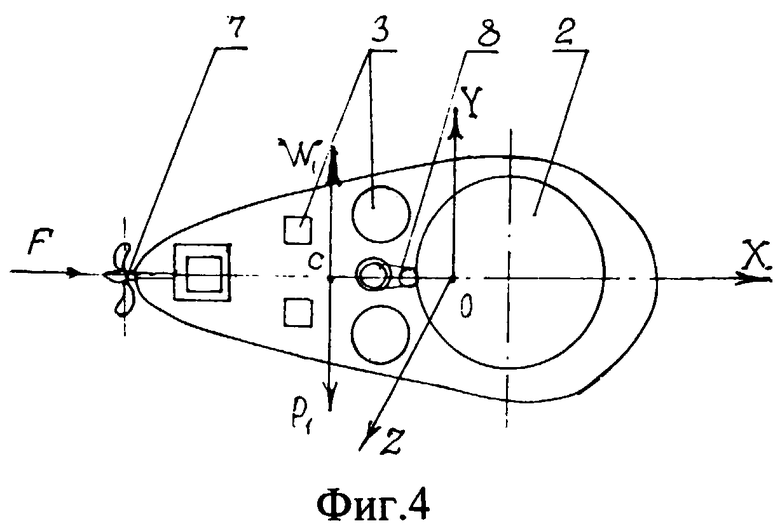
На фиг.1-5 схематично показана реализация способа обеспечения управляемости подводного аппарата. На фиг.1 и 4 дан продольный разрез компоновки подводного аппарата в вертикальной плоскости, где подводный аппарат спроектирован в виде двух сборок: 1 и 2. Строительная сборка 1 связана с главными строительными осями XYZ (Фиг.1 и 4). Элементы 3 этой сборки:
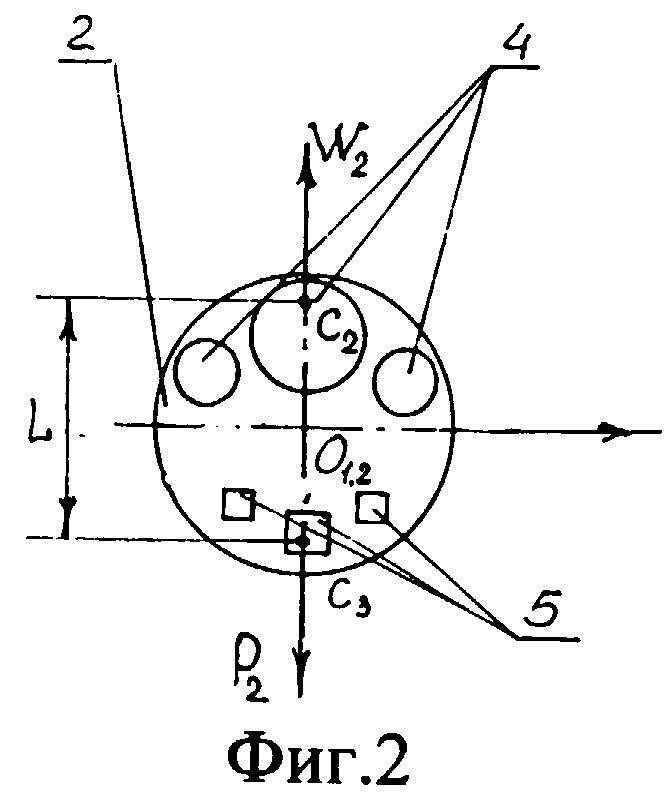
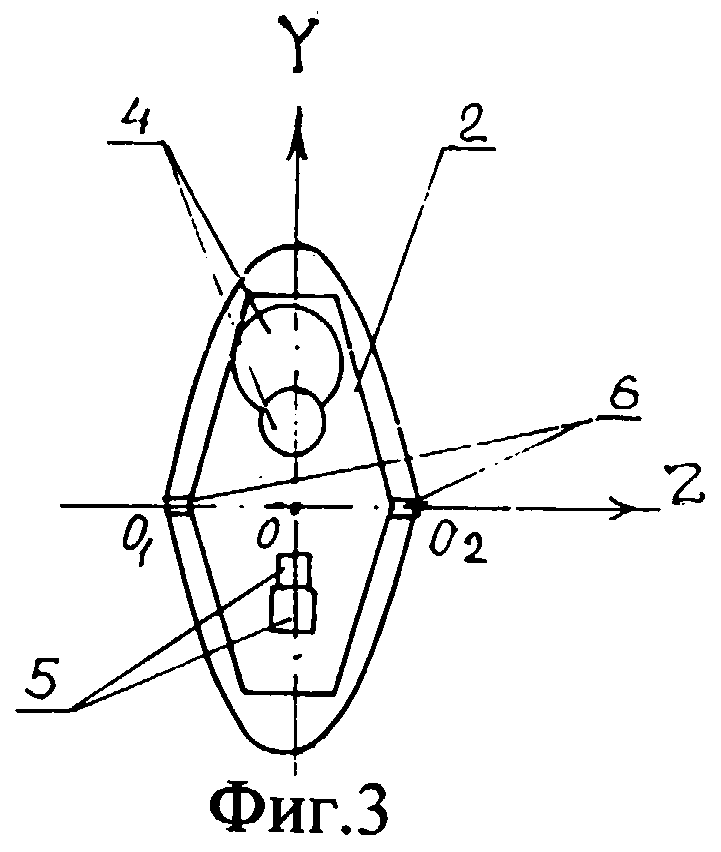
конструктивные и функциональные агрегаты, двигатель 7 и привод 8, а также плавучести, уравновешивающие их, зафиксированы относительно осей XYZ. Сборка 2, управляющая дифферентом, выделена на фиг.2, в которой тяжелые элементы конструкций 5 и уравновешивающие их плавучести 4, разнесены относительно оси O1-O2 взаимного вращения сборок, проходящей в подшипниках 6, показанной на поперечном разрезе (Фиг.3). Главные строительные оси подводного аппарата XYZ - связанная с аппаратом система координат - фиксирована на строительной сборке (Фиг.1 и 4) так, что продольная ось ОХ совпадает с направлением вектора упора движителя F, а вертикальная ось OY параллельна вектору силы тяжести, при этом ось O1-O2 вращения сборок, параллельна поперечной оси OZ (Фиг.3.). На фиг.1-4 показанные силы тяжести p1 и р2 и водоизмещения W1 и W2, соответственно, строительной и управляющей дифферентом сборок. В точке C1 (Фиг.1 и 4) совмещают приложение сил p1 и W1 - веса и водоизмещения строительной сборки. Силы водоизмещения и веса в воде управляющей дифферентом сборки 2 проектируют в точках: С2 - водоизмещения W2 и в С3-р2 веса вводе этой сборки (Фиг.1 и 2). Таким образом, С2-С3=L является метацентрической высотой управляющей сборки 2. Управляют дифферентом с помощью привода 8, которым смещают сборки на заданный угол дифферента) (Фиг.5).
Для одновременного управления по двум степеням свободы - осям: OZ по дифференту и ОХ по крену, сборки соединяют карданным шарниром и снабжают двумя независимыми приводами для каждой оси шарнира.
Обе сборки могут быть смонтированы, например, во внешних проницаемых корпусах или без них - на несущих конструктивах из пластика или металла. Конструктивные элементы и плавучести 3 сборки 1 могут быть спроектированы закладного типа, т.е. с совмещением центров тяжести и водоизмещения. Так что вес сборки 1 в воде и ее метацентрическая высота станут равными нулю и, в целом, сборка окажется индифферентной относительно поля сил тяжести. Привод 8 может быть спроектирован в виде погружного электродвигателя (типа Д-120МПИ с магнитной муфтой) и редуктора, управляемого микропроцессором, обеспечивая управляемый дифференту (3 моментом привода:
M=p2×Lxsmβ.
В качестве блоков плавучести могут проектироваться для не больших глубин вспененные материалы из ПС или ПХВ, а для больших глубин могут применяться сферопластики типа ЭДС-6А или ЭДС-7А. Конструкция несущего корпуса или несущего конструктива может быть спроектирована из корозионно-устойчивого материала, например, сплава АМг6 с глубоким анодированием, или пластика с включением микростеклосфер (типа МС-ВП) и эпоксидной смолы (типа ЭД-20) для придания плавучести материалу корпуса. Подшипники 6 могут быть спроектированы скользящего типа с использованием антифрикционных материалов, не требующих в воде смазки таких как: текстолит, фторопласт или полиацеталий.
Источники информации
1. Комаров В.С. и Ястребов В.С. Устройство для дифферентовки и регулирования плавучести подводного аппарата. А.С. СССР №1316172, кл. B63G 8/26, 1985.
2. Принципы построения технических средств исследования океана. Сборник статей. / Под ред. В.С.Ястребова. - М.: Наука, 1982, с.83-86.
| название | год | авторы | номер документа |
|---|---|---|---|
| Маневровый телеуправляемый подводный аппарат | 2020 |
|
RU2751727C1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| Прибор для измерения остойчивости | 1990 |
|
SU1815654A1 |
| Способ передвижения по вертикали подводного аппарата за счет солнечной энергии, использующий управление его плавучестью | 2016 |
|
RU2664613C1 |
| НЕФТЕДОБЫВАЮЩАЯ ПОДВОДНАЯ ПЛАТФОРМА | 2011 |
|
RU2479458C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| ПЕРЕДВИЖНОЙ ПРОЗРАЧНЫЙ ОПЫТОВЫЙ БАССЕЙН | 2015 |
|
RU2607817C2 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| АМФИБИЙНАЯ МАШИНА | 2008 |
|
RU2406619C2 |
Изобретение относится к технологии обеспечения управляемости подводными аппаратами и может быть использовано в технике подводных исследований, подводно-спасательных служб, а также в технике подводно-поисковых и подводно-буровых работ. Способ обеспечения управляемости подводным аппаратом содержит разделение конструкции аппарата на две сборки: одну из них строительную, фиксированную относительно вектора упора двигателей и связанной системы координат - главных строительных осей подводного аппарата, и вторую - управляющую дифферентом. Каждую сборку уравновешивают в воде плавучестями, совмещая в строительной сборке центр тяжести с центром величины, а в сборке, управляющей дифферентом, диаметрально разносят центры тяжести и величины относительно оси дифферентования - оси взаимного вращения сборок, которая является параллельной главной поперечной оси аппарата. Ось взаимного вращения размещают в подшипниках строительной сборки и соединяют ее с приводом взаимного вращения сборок, обеспечивающим момент: M=L×p, где L - метацентрическая высота - расстояние между центром тяжести и центром величины сборки, управляющей дифферентом; р - вес в воде сборки, управляющей дифферентом. Сборки могут соединять карданным шарниром со степенями свободы по дифференту и крену, при этом имеется независимый привод для каждой степени. Изобретение позволяет методически устранять ограничения пределов управляемости при минимальных управляющих усилиях, что повышает транспортную эффективность подводного аппарата. 1 з.п. ф-лы, 5 ил.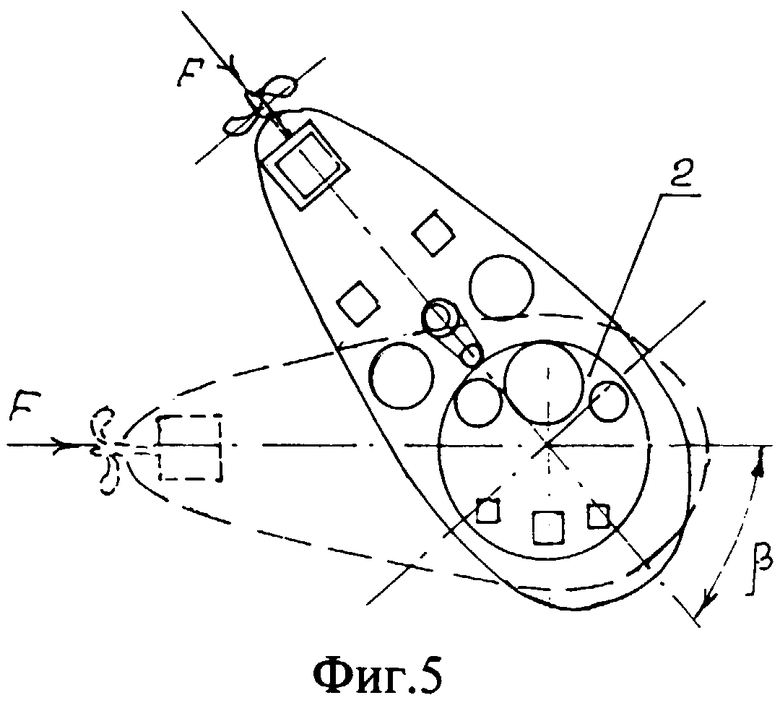
1. Способ обеспечения управляемости подводным аппаратом, включающий разделение конструкции аппарата на две сборки: одну из них строительную, фиксированную относительно вектора упора двигателей и связанной системы координат - главных строительных осей подводного аппарата, и вторую - управляющую дифферентом, отличающийся тем, что каждую сборку уравновешивают в воде плавучестями, совмещая в строительной сборке центр тяжести с центром величины, а в сборке, управляющей дифферентом, диаметрально разносят центры тяжести и величины относительно оси дифферентования - оси взаимного вращения сборок, которая является параллельной главной поперечной оси аппарата, при этом ось взаимного вращения размещают в подшипниках строительной сборки и соединяют ее с приводом взаимного вращения сборок, обеспечивающим момент:
M=L·p,
где L - метацентрическая высота - расстояние между центром тяжести и центром величины сборки, управляющей дифферентом;
р - вес в воде сборки, управляющей дифферентом.
2. Способ по п.1, отличающийся тем, что сборки соединяют карданным шарниром со степенями свободы по дифференту и крену, при этом снабжают независимым приводом для каждой степени.
| Мягкий контейнер | 1980 |
|
SU950610A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОСТАТОЧНОЙ ПЛАВУЧЕСТЬЮ, ДИФФЕРЕНТОМ И КРЕНОМ ПОДВОДНОГО УСТРОЙСТВА | 2001 |
|
RU2185304C1 |
| Принципы построения технических средств исследования океана./ Под редакцией В.С.Ястребова | |||
| АН СССР | |||
| Институт океанологии им | |||
| П.П.Ширшова | |||
| М.: НАУКА, 1982, с.83-86. | |||

