Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам), и может быть использовано для исследования водных акваторий.
Известен подводный планер (Лопота А.В., Николаев А.Б. «Морские робототехнические комплексы военного и специального назначения», СПб., Издательство ЦНИИ РТК, 2016 г., стр. 16-17). Перемещение планера-глайдера в водной среде по глубине осуществляется за счет изменения знака плавучести. Для этого планер-глайдер оснащен системой автоматического управления плавучестью которая формирует управляющие воздействия в виде изменения величины и знака плавучести планера-глайдера. Система управления плавучестью состоит из балластной цистерны, размещенной в прочном корпусе планера-глайдера, эластомерной емкости в проницаемой части, электромагнитных клапанов и гидронасоса рабочей жидкости. Водоизмещение аппарата может управляемо меняться при откачке рабочей жидкости из балластной цистерны в эластичную емкость или, наоборот, подаче жидкости из емкости в цистерну, приводя к изменению плавучести. При спуске на воду планер-глайдер постепенно погружается по пологой наклонной траектории со средней скоростью 0,8 узла. Затем он всплывает по восходящей к поверхности траектории и далее цикл повторяется. Управление курсом планера-глайдера осуществляют за счет отклонения кормового вертикального руля за стабилизатором.
Известны аналогичные технические решения, например, подводный планер (полезная модель РФ №124245, 2012 г. B63G 8/00, B63G 8/14), подводный планер по патенту РФ №2490164, 2012 г., подводный глайдер (полезная модель РФ №183537, 2018 г.), подводный планер-глайдер по патенту РФ №2 669 244, 2017 г.
Известен автономный подводный необитаемый аппарат планирующего типа (планер-глайдер), содержащий корпус с крылом, систему изменения плавучести, систему изменения угла дифферента, систему изменения угла крена (полезная модель РФ №164034, 2015 г., B63G 8/00). Известное техническое решение (полезная модель РФ №164034, 2015 г., B63G 8/00) принято за прототип.Особенностью известного технического решения является возможность не только изменения плавучести, но и изменения дифферента за счет перемещения аккумуляторной батареи вдоль оси аппарата, что обеспечивает оптимальный угол наклона крыла планера-глайдера при его движении в водной среде.
Недостатком технического решения, принятого за прототип является необходимость не только а регулировке плавучести аппарата, но и необходимости изменения его дифферента, что увеличивает энергопотребление аппарата и усложняет его конструкцию, в то время как главным преимуществом подводного планера-глайдера является простота его конструкции (по сравнению с подводными аппаратами традиционного типа) за счет обеспечения движения в водной среде без использования движителя.
Целью предложенного технического решения является устранение указанного недостатка, а именно - максимальное упрощение конструкции подводного планера-глайдера, снижение его энергопотребления для увеличения автономности.
Указанная цель достигается тем, что в отличие от прототипа, подводный планер-глайдер, содержащий корпус, систему изменения плавучести и горизонтальные рули отличается тем, что горизонтаьные рули закреплены к корпусу под углом к основной плоскости планера-глайдера, а система изменения плавучести выполнена в виде емкости, расположенной внутри корпуса в верхней или нижней части корпуса, на максимально возможном расстоянии от центра величины подводного планера-глайдера, оборудована клапаном для впуска забортной воды и баллоном со сжатым воздухом с арматурой, снабжена датчиком глубины погружения связанным с клапаном для впуска забортной воды и баллоном со сжатым воздухом. Объем емкости изменения знака плавучести выбирается таким образом, что в заполненном состоянии обеспечивает отрицательную плавучесть подводного планера-глайдера, а в осушенном состоянии -положительную плавучесть подводного планера-глайдера.
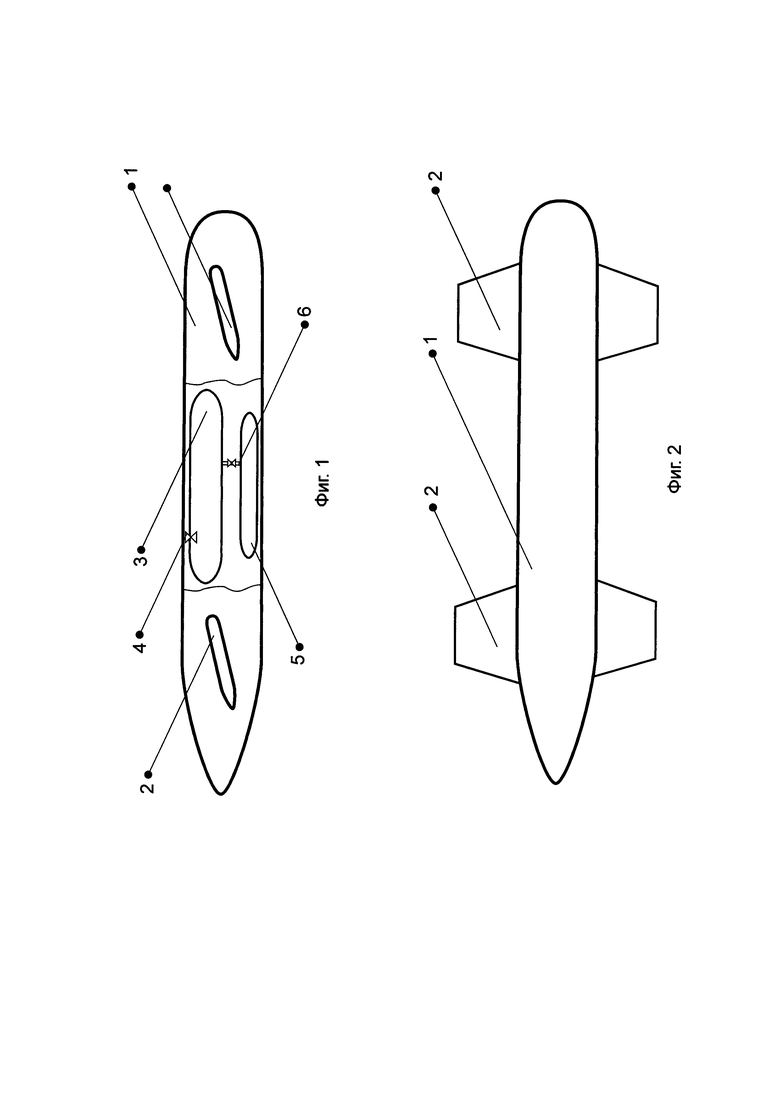
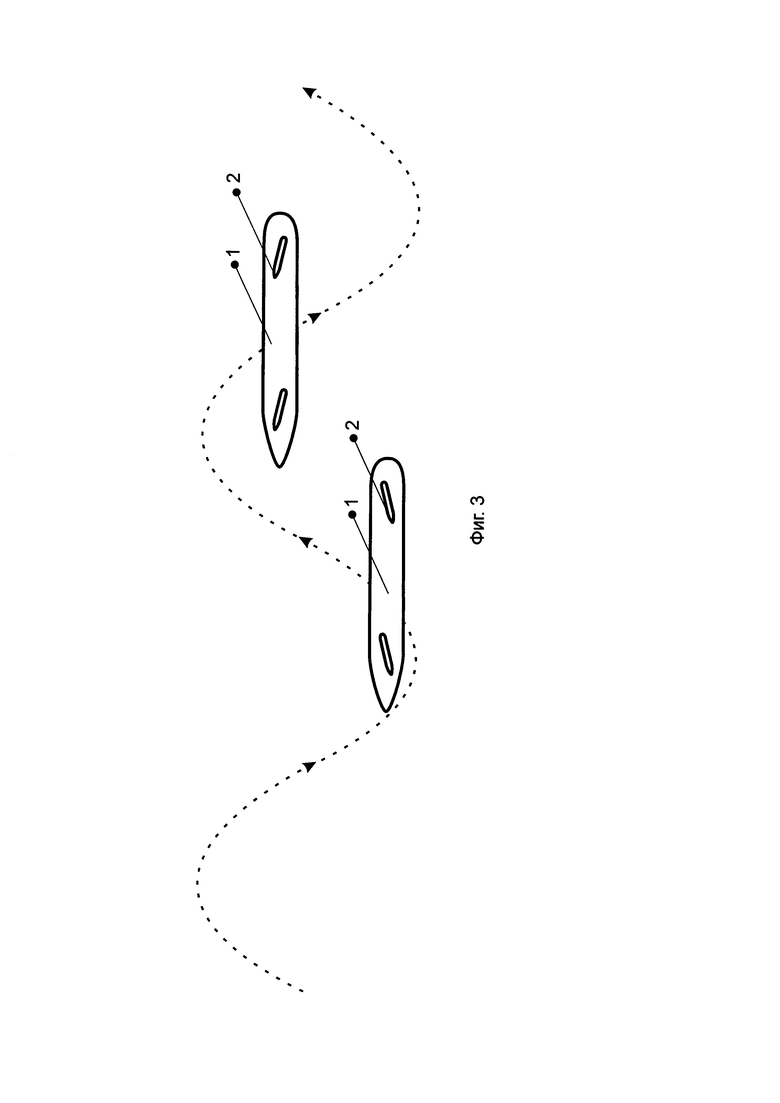
Предложенное техническое решение иллюстрируется чертежами. На Фиг. 1 изображен подводный планер-глайдер, вид сбоку. На Фиг. 2 изображен подводный планер-глайдер, вид сверху. На Фиг. 3 показана траектория движения подводного планера-глайдера в водной среде.
Подводный планер-глайдер включает корпус 1 удобообтекаемой, например, торпедообразной формы, горизонтальные рули 2, например, расположенные в оконечностях подводного планера-глайдера, закрепленные на корпусе 1 под углом к основной плоскости планера-глайдера. Подводный планер-глайдер содержит систему изменения плавучести в виде емкости 3, расположенной в верхней или нижней части корпуса планера-глайдера. Емкость 3 оборудована клапаном 4 для впуска забортной воды и баллоном 5 со сжатым воздухом с арматурой 6. Клапан 4 и баллон 6 связаны с датчиком глубины погружения. Объем емкости 3 выбирается таким образом, что в заполненном состоянии обеспечивает отрицательную плавучесть подводного планера-глайдера, а в осушенном состоянии -положительную плавучесть подводного планера-глайдера.
Подводный планер-глайдер работает следующим образом. При заполненной емкости 3 обеспечивается отрицательная плавучесть планера-глайдера, благодаря горизонтальным рулям 2 закрепленным к корпусу 1 под углом к основной плоскости подводного планера-глайдера обеспечивается движение планера-глайдера вперед-вниз. По достижении заданной глубины погружения по сигналу датчика глубины обеспечивается продувание емкости 3 с использованием баллона 5 с арматурой 6. Подводный планер-глайдер получает положительную плавучесть. Размещение емкости 3 в верхней или нижней части корпуса планера-глайдера обеспечивает также перемещение центра тяжести планера-глайдера таким образом, что планер-глайдер переворачивается вокруг оси корпуса на 180° благодаря горизонтальным рулям, закрепленным на корпусе 1 под углом к основной плоскости двигается вперед-вниз. При этом горизонтальные рули выбираются симметричного профиля. По достижении заданной глубины погружения по сигналу датчика глубины осуществляется заполнение емкости 3 с использованием клапана 4 и планер-глайдер начинает движение вперед-вниз. Далее цикл повторяется. Количество циклов погружения-всплытия планера-глайдера определяется объемом сжатого воздуха в баллоне 5.
Таким образом, отличительные признаки предложенного технического решения обеспечивает достижение заявленного положительного эффекта - упрощение конструкции и снижение энергопотребления аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| Подводный планер-глайдер | 2017 |
|
RU2669244C1 |
| Подводный аппарат со стабилизатором глубины погружения без хода | 2020 |
|
RU2746205C1 |
| Спасательный подводный аппарат со стабилизатором глубины погружения без хода | 2020 |
|
RU2754166C1 |
| РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2688544C1 |
| Глайдер | 2023 |
|
RU2819541C1 |
Изобретение относится к судостроению, а именно к автономным необитаемым подводным самоходным аппаратам. Подводный планер-глайдер содержит корпус, систему изменения плавучести и горизонтальные рули. Горизонтальные рули закреплены к корпусу под углом к основной плоскости планера-глайдера, а система изменения плавучести выполнена в виде емкости, расположенной внутри корпуса в верхней или нижней части корпуса, на максимально возможном расстоянии от центра величины подводного планера-глайдера и оборудована клапаном для впуска забортной воды и баллоном со сжатым воздухом с арматурой, также снабжена датчиком глубины погружения, связанным с клапаном для впуска забортной воды и баллоном со сжатым воздухом. Объем емкости изменения плавучести выбирается таким образом, что в заполненном состоянии обеспечивает отрицательную плавучесть подводного планера-глайдера, а в осушенном состоянии - положительную плавучесть подводного планера-глайдера. Горизонтальные рули выбираются симметричного профиля. Достигается упрощение конструкции подводного планера-глайдера и снижение его энергопотребления для увеличения автономности. 1 з.п. ф-лы, 3 ил.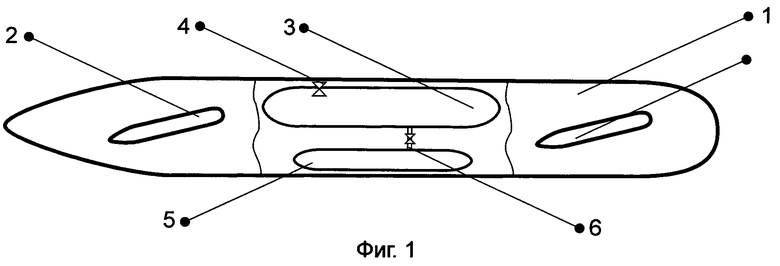
1. Подводный планер-глайдер, содержащий корпус, систему изменения плавучести и горизонтальные рули, отличающийся тем, что горизонтальные рули закреплены к корпусу под углом к основной плоскости планера-глайдера, а система изменения плавучести выполнена в виде емкости, расположенной внутри корпуса в верхней или нижней части корпуса, оборудована клапаном для впуска забортной воды и баллоном со сжатым воздухом с арматурой, снабжена датчиком глубины погружения, связанным с клапаном для впуска забортной воды и баллоном со сжатым воздухом, при этом объем емкости выбирается таким образом, что в заполненном состоянии обеспечивает отрицательную плавучесть подводного планера-глайдера, а в осушенном состоянии - положительную плавучесть подводного планера-глайдера.
2. Подводный планер-глайдер по п.1, отличающийся тем, что горизонтальные рули имеют симметричный профиль.
| 0 |
|
SU164034A1 | |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| JP 2007276609 A, 25.10.2007 | |||
| KR 1020160015935 A, 15.02.2016. | |||

