Изобретение относится к области машиностроения, а именно к производству кранов, и может быть использовано для контроля динамических нагрузок, возникающих в процессе поворота стрелы крана с грузом, преимущественно в стреловых самоходных кранах.
Известен способ управления стреловым краном (патент РФ №2058929 С1 МПК6 В66С 23/90 27.04.1996), включающий определение положения оборудования крана путем измерения длины стрелы, угла наклона и угла поворота стрелы, определение нагрузки на грузозахватном органе, инициирование оператором движений оборудования крана путем воздействия на органы управления и отключение приводов оборудования крана при перегрузке. Этот способ обеспечивает защиту от перегрузки и опасных перемещений оборудования крана. Способ реализован в устройстве управления грузоподъемным краном, содержащем процессор, "n" датчиков положения оборудования крана (датчик длины, датчик угла наклона стрелы и датчик угла поворота стрелы), подключенных к соответствующим входам процессора, датчик нагрузки, выход которого подключен к "n+1-ому" входу процессора, блок усилителей и исполнительный блок. Процессор включает в себя блок задания допустимых координат грузозахватного органа, блок коррекции допустимых координат, блок задания начальных координат грузозахватного органа, блок определения допустимого вылета стрелы по нагрузке, блок определения проекции стрелы на горизонтальную плоскость, блок определения фактических координат грузозахватного органа и блок сравнения.
Недостатком известного способа управления грузоподъемными кранами является то, что не учитывается динамика перемещающегося груза и в зависимости от скорости движения могут возникать колебания груза низкой частоты. Другим недостатком известного способа является то, что в критических ситуациях происходит остановка крана, что в ряде случаев может привести к дополнительному возрастанию опрокидывающего момента.
Более совершенным и наиболее близким является способ управления грузоподъемным краном (патент RU 2309112 С1 МПК7 В66С 23/88 (2006.01) В66С 13/18 (2006.01) от 2006.03.03), заключающийся в том, что путем воздействия на органы управления краном производится запуск и отключение приводов механизмов, перемещающих оборудование крана, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования, производится отключение приводов механизмов по фактору ограничения перемещений, а путем обработки сигналов датчиков, контролирующих положение подвижного оборудования крана и его нагрузку, производится отключение приводов механизмов по фактору перегрузки, для снижения уровня раскачивания груза, вызванного инерционными силами в начале движения и при останове, способом предусмотрены установка дополнительного датчика длины каната и переключателя кратности полиспаста, сигналы которых используются для определения высоты подвеса груза и периода раскачивания подвешенного груза, создание режима и сигналов выбора допустимой скорости движения в зависимости от нагрузки на кран, создание режима и сигналов предварительного ограничения перемещения по результатам вычисления ограничений по факторам перегрузки и ограничения перемещений, а также по результату вычисления поправки к расстоянию в зависимости от периода раскачивания подвешенного груза, вычисление по сигналам датчиков, контролирующих положение подвижного оборудования крана, инерционных показателей оборудования, фактических скоростей и ускорений оборудования при запуске и отключении приводов для определения моментов отключения и включения приводов механизмов и создания автоматического режима импульсного управления, зависящего от периода и фазы раскачивания подвешенного груза, создание режима логической обработки данных, объединения сигналов запуска и сигналов отключения приводов механизмов и подключения их к усилителям, включающим исполнительные механизмы.
Недостатком известного способа является то, что дополнительные силы инерции, возникающие при повороте стрелы крана с грузом не определяются в достаточной степени для расчета и анализа опрокидывающего момента с последующим активным управлением процессом поворота.
Задачей изобретения является повышение производительности и уровня безопасности погрузочно-разгрузочных работ, выполняемых с привлечением мобильных грузоподъемных машин, и предоставление легко воспринимаемой информации оператору о текущей устойчивости системы в реальном масштабе времени в условиях непрерывного технологического процесса погрузочно-разгрузочных работ.
Указанная задача решена тем, что способ управления грузоподъемным краном, заключающийся в том, что путем воздействия на органы управления краном производят запуск и отключение приводов механизмов, перемещающих оборудование крана, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования, производят отключение приводов механизмов по фактору ограничения перемещений, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования крана и его нагрузку, производят отключение приводов механизмов по фактору перегрузки, способом предусмотрены установка дополнительного датчика длины каната и переключателя кратности полиспаста, сигналы которых используют для определения высоты подвеса груза и периода раскачивания подвешенного груза, создают режим и сигналы выбора допустимой скорости движения в зависимости от нагрузки на кран, создание режима и сигналов предварительного ограничения перемещения по результатам вычисления ограничений по факторам перегрузки и ограничения перемещений, а также по результату вычисления поправки к расстоянию в зависимости от периода раскачивания подвешенного груза, вычисляют по сигналам датчиков, контролирующих положение подвижного оборудования крана, инерционные показатели оборудования, фактические скорости и ускорения оборудования при запуске и отключении приводов для определения моментов отключения и включения приводов механизмов и создают автоматический режим импульсного управления, зависящего от периода и фазы раскачивания подвешенного груза, создают режим логической обработки данных, объединения сигналов запуска и сигналов отключения приводов механизмов и подключения их к усилителям, включающим исполнительные механизмы, рассчитывают значения допустимого опрокидывающего момента для каждого значения вылета стрелы и вводят эту информацию в память бортового микропроцессора, в процессе работы крана измеряют натяжение каната, из полученного значения натяжения при помощи программы микропроцессора определяют текущее значение опрокидывающего момента и сравнивают с допустимым для данного вылета стрелы, по изменению положения стрелового оборудования, определяют оптимальные значения величин длины стрелы, высоты подвеса, скорости и ускорения при совершении дальнейшего движения и предоставляют эту информацию на видеопанели, оператору предоставляют возможность изменить рекомендованные параметры, при возникновении случая приближения текущего значения опрокидывающего момента к максимально допустимому для данного положения стрелового оборудования система управления автоматически осуществляет плавное снижение скорости для предоставления возможности оператору изменить параметры движения - высоту подвеса, угол наклона или длину стрелы, ускорение движения, в случае превышения допустимого опрокидывающего момента движение плавно останавливают, дальнейшее движение оставляют только в рекомендованном режиме.
Сущность предложенного способа поясняется чертежом, где на груз 1 подвешенный на канате 2, действуют сила тяжести и сила инерции, результирующая сила передается по канату 2 через оголовок 3 стрелы 4, изменение натяжения каната 2 определяют устройством 5, и на основании полученных данных определяют изменение радиуса и высоты действия сил относительно ребра опрокидывания грузоподъемного крана.
Для реализации поставленной задачи управления краном во время поворотного движения наиболее целесообразным является расчет текущего опрокидывающего момента и сравнение его с допустимым, заданным в микропроцессоре в виде грузовысотной характеристики, численное значение коэффициента грузовой устойчивости крана определяется по формуле:
где Mудерж - удерживающий момент крана; Mon - опрокидывающий момент, созданный весом груза и весом стрелы.
Текущее значение опрокидывающего момента вычисляется относительно точки контакта гидроопоры крана и грунта по формуле:
M on =G·(l+Δl)+F ин .·(h+Δh)+M с,
где G - значение силы тяжести груза, Fин - значение силы инерции, действующей на груз в процессе перемещения стрелового оборудования, Mс - опрокидывающий момент, создаваемый стрелой, l - плечо действия силы тяжести груза, Δl - величина, на которую увеличивается или уменьшается плечо действия силы тяжести при действии силы инерции, h - высота, на которой находится груз до начала поворотного движения, имеет прямую зависимость от значения высоты повеса (длины каната), Δh - величина, на которую увеличивается высота, на которой находится груз во время действия силы инерции.
Вычисление Δl и Δh возможно производить в зависимости от угла α, на который отклоняется канат с грузом при совершении поворотного движения.
Δl=λс·sinα,
Δh=λс - Δλс·cosα,
где λс - высота канатного подвеса.
 ,
,
где  - вектор силы инерции,
- вектор силы инерции,  - вектор силы тяжести груза.
- вектор силы тяжести груза.
Расчет инерционной нагрузки производится по формуле:
 ,
,
где  - вектор силы натяжения каната,
- вектор силы натяжения каната,
где T - значение силы натяжения каната,
В этом способе учитываются также дополнительные воздействия на кран:
силы инерции, ветер, уклон рабочей площадки при просадке опор и др., все эти параметры будут оказывать влияние на натяжение каната, а значит, учитываться при управлении.
Способ осуществляется следующим образом. Стреловой кран имеет бортовой микропроцессор с возможностью получения и передачи данных. В памяти микропроцессора имеется математическая модель крана и информация о грузовысотной характеристике. Также в памяти микропроцессора имеется информация о рабочем пространстве с учетом препятствий, а с датчиков поступает информация о текущем состоянии и положении оборудования. В процессе работы устройством 5 измеряют натяжения каната 2, причем для точности данных измерение производят устройством 5, установленным на стреле 4 крана после оголовка 3 стрелы 4. В процессе работы по перемещению груза 1 натяжение каната изменяется, и данные поступают в микропроцессор для последующей обработки, в результате которой определяют значение силы инерции Fин и текущего опрокидывающего момента, после чего формируют блок данных с оптимальными параметрами движения для данного положения стрелы и груза. Данные поступают на дисплей, оператор принимает решение о дальнейшем управлении в соответствии с предложенными рекомендациями. При возникновении случая приближения опрокидывающего момента к максимально допустимому микропроцессор формирует управляющий сигнал на исполнительные органы крана с целью плавного снижения скорости для предоставления оператору возможности управления с целью уменьшения возникающих динамических нагрузок путем изменения рекомендованных параметров. Полную остановку движения осуществляют автоматически в случае, если выполняемые оператором операции ведут к дальнейшему увеличению динамической нагрузки и превышению допустимого опрокидывающего момента, причем дальнейшее движение возможно только в рекомендованном режиме с учетом положения стрелы 4 крана и груза 1 в заданном рабочем пространстве с учетом имеющихся препятствий.
Обработку поступающей информации осуществляют с помощью микропроцессорного модуля на базе микропроцессора с постоянным запоминающим устройством и оперативным запоминающим устройством.
Отличительными чертами способа управления краном с целью уменьшения динамической нагрузки является: в способе предлагается более точно измерять действующие силы инерции и учитывать возможность действия случайных нагрузок, в том числе просадки грунта под опорами и порывы ветра, в результате активного управления не исключается возможность движения при достижении максимально допустимого значения опрокидывающего момента, а также существует возможность установки дополнительного контрольно-измерительного оборудования, так как в основе действий способа лежит математическая модель крана, находящаяся в памяти бортового микропроцессора, и может быть изменена в зависимости от типа крана и его индивидуальных особенностей и усложнена при предъявлении более жестких требований и по мере развития исследований, т.е. устойчива к моральному старению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
Изобретение относится к области машиностроения и может быть использовано для контроля динамических характеристик, возникающих в процессе поворота стрелы крана с грузом. Способ управления грузоподъемным краном заключается в том, что обрабатывают сигналы датчиков, контролирующих положение подвижного оборудования крана и его нагрузку, отключают приводы механизмов по фактору ограничения перемещений и по фактору перегрузки. Создают режим и сигналы выбора допустимой скорости движения в зависимости от нагрузки на кран. Рассчитывают значения допустимого опрокидывающего момента для каждого значения вылета стрелы, вводят эту информацию в память бортового микропроцессора. Измеряют натяжение каната, из полученного значения натяжения определяют текущее значение опрокидывающего момента и сравнивают с допустимым для данного вылета стрелы. Предоставляют эту информацию на видео панели. Оператору предоставляют возможность изменить рекомендованные параметры. При приближении текущего значения опрокидывающего момента к максимально допустимому, система управления автоматически осуществляет снижение скорости, для предоставления возможности оператору изменить параметры движения. В случае превышения допустимого опрокидывающего момента движение останавливают, дальнейшее движение осуществляют только в рекомендованном режиме. Изобретение позволяет повысить уровень безопасности погрузочно-разгрузочных работ. 1 ил.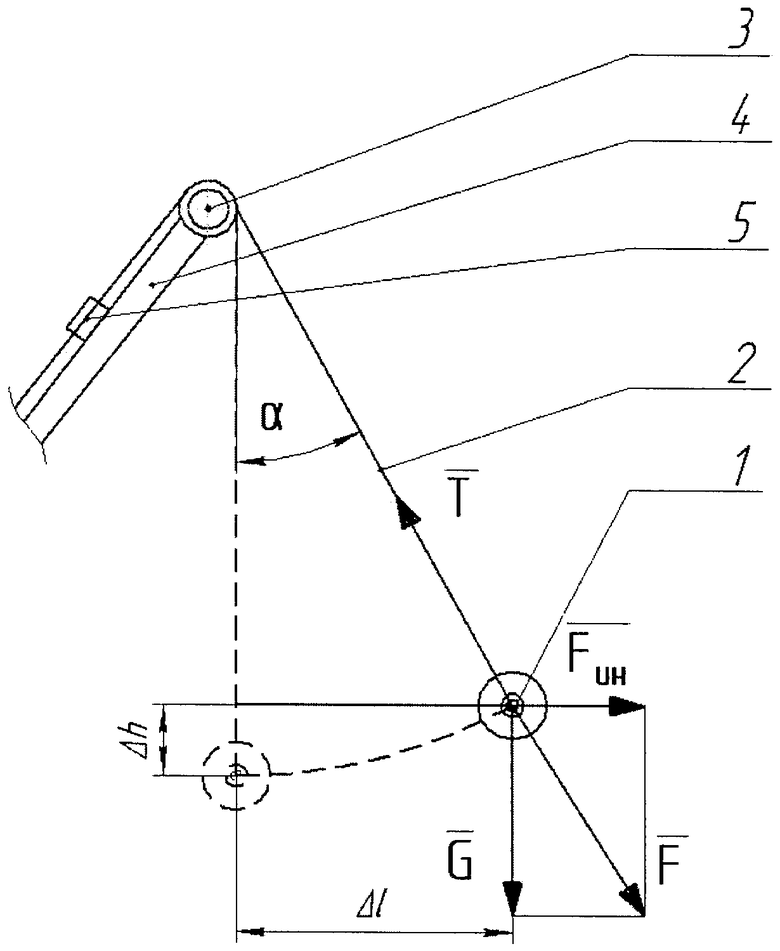
Способ управления грузоподъемным краном, заключающийся в том, что путем воздействия на органы управления краном производят запуск и отключение приводов механизмов, перемещающих оборудование крана, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования, производят отключение приводов механизмов по фактору ограничения перемещений, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования крана и его нагрузку, производят отключение приводов механизмов по фактору перегрузки, способом предусмотрены установка дополнительного датчика длины каната и переключателя кратности полиспаста, сигналы которых используют для определения высоты подвеса груза и периода раскачивания подвешенного груза, создают режим и сигналы выбора допустимой скорости движения в зависимости от нагрузки на кран, создание режима и сигналов предварительного ограничения перемещения по результатам вычисления ограничений по факторам перегрузки и ограничения перемещений, а также по результату вычисления поправки к расстоянию в зависимости от периода раскачивания подвешенного груза вычисляют по сигналам датчиков, контролирующих положение подвижного оборудования крана, инерционные показатели оборудования, фактические скорости и ускорения оборудования при запуске и отключении приводов для определения моментов отключения и включения приводов механизмов и создают автоматический режим импульсного управления, зависящего от периода и фазы раскачивания подвешенного груза, создают режим логической обработки данных, объединения сигналов запуска и сигналов отключения приводов механизмов и подключения их к усилителям, включающим исполнительные механизмы, рассчитывают значения допустимого опрокидывающего момента для каждого значения вылета стрелы и вводят эту информацию в память бортового микропроцессора, в процессе работы крана измеряют натяжение каната, из полученного значения натяжения при помощи программы микропроцессора определяют текущее значение опрокидывающего момента и сравнивают с допустимым для данного вылета стрелы, по изменению положения стрелового оборудования, определяют оптимальные значения величин длинны стрелы, высоты подвеса, скорости и ускорения при совершении дальнейшего движения и предоставляют эту информацию на видеопанели, оператору предоставляют возможность изменить рекомендованные параметры, при возникновении случая приближения текущего значения опрокидывающего момента к максимально допустимому для данного положения стрелового оборудования система управления автоматически осуществляет плавное снижение скорости для предоставления возможности оператору изменить параметры движения - высоту подвеса, угол наклона или длину стрелы, ускорение движения, в случае превышения допустимого опрокидывающего момента движение плавно останавливают, дальнейшее движение оставляют только в рекомендованном режиме.
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| КОЖУХОТРУБНЫЙ ТЕПЛООБМЕННИК | 1991 |
|
RU2009428C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2376238C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |

