Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известен способ измерения дальности с помощью лазерного дальномера путем определения времени Т распространения лазерного импульса до цели и обратно, по которому судят о дальности до цели R=cT/2, где с - скорость света [1]. При наличии нескольких целей в поле зрения дальномера, определяемом расходимостью лазерного излучения и полем зрения приемного канала, этот способ не позволяет определить истинную дальность до выбранной цели.
Этот недостаток частично устранен в способах измерения дальности, заключающихся в измерении дальности до тех объектов, которые соответствуют заданному режиму селекции «первая цель», «вторая цель», последняя цель» и т.п. [2]. Эти способы требуют значительного времени для последовательного анализа целевой обстановки путем повторных зондирований, а результаты такого анализа имеют низкую достоверность вследствие невоспроизводимости целевой обстановки за время между измерениями, в результате чего выбранная цель при одном замере может быть второй, а при другом - первой или третьей, что затрудняет получение правильного результата и, даже если он получен, не позволяет оценить его достоверность.
Введение средств запоминания нескольких результатов измерения позволяет определить целевую обстановку за одно зондирование.
Наиболее близким по технической сущности к предлагаемому является способ измерения дальности с помощью лазерного дальномера, заключающийся в определении дальности до каждой из нескольких целей в поле зрения дальномера при одном излучении лазера, преобразовании результатов измерения в цифровую форму, запоминании результатов и поочередном их выводе на многоразрядный цифровой индикатор путем последовательного опроса [3]. Как отмечено в [3], указанные выше действия осложняют работу оператора и увеличивают время для получения достоверного измерения.
Задачей изобретения является сокращение времени измерения и повышение достоверности определения дальности до выбранной цели при наличии мешающих объектов.
Указанная задача решается за счет того, что в известном способе измерения дальности с помощью лазерного дальномера, заключающемся в определении дальности до каждой из нескольких целей в поле зрения дальномера при одном излучении лазера, преобразовании результатов измерения в цифровую форму, запоминании результатов и поочередном их выводе на многоразрядный цифровой индикатор, в процессе индикации дальности до выбранной цели включают индексы зарегистрированных целей в количестве, равном количеству запомненных результатов измерения дальности, а индекс с порядковым положением, соответствующим порядковому номеру цели, дальность до которой выведена на индикатор, выделяют в режиме, позволяющем отличать этот выделенный индекс от других, например, включают его в импульсно-периодическом режиме, после этого, если количество индексов целей более одного, выявляют наблюдаемые в створе с выбранной целью объекты в количестве, равном количеству включенных индексов, поочередно выводят на индикатор запомненные результаты измерения и, учитывая взаимное положение выявленных объектов и соответствующих им индексов целей, принимают за достоверный результат тот, выделенный индекс которого по своему порядковому положению соответствует порядковому положению выбранной цели относительно других выявленных в поле зрения дальномера объектов.
Выделенный индекс можно включать в режиме повышенной яркости.
В качестве индексов целей можно включать децимальные точки многоразрядного цифрового индикатора [4].
Анализ помехо-целевой обстановки дополнительно упрощается, если первой выводят на индикатор дальность до последней зарегистрированной цели, а вывод других дальностей на индикатор осуществляют в обратном порядке следования целей по дальности.
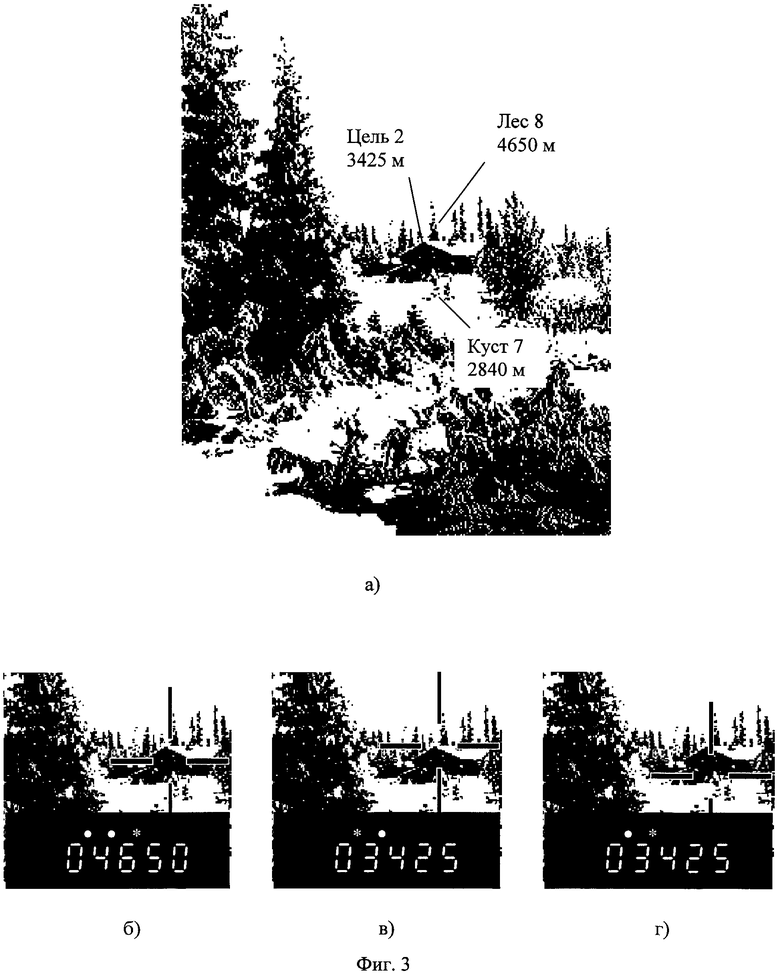
На фиг.1 представлена типовая помехоцелевая обстановка и реакция на нее дальномера. На фиг.2а) схема индикации данных, а на фиг.2б) - ее осуществление с помощью пятиразрядного семисегментного индикатора, размещенного в поле зрения визира. Фиг.3 иллюстрирует применение способа в реальной помехоцелевой обстановке.
Способ осуществляется следующим образом.
Ось визирования дальномера 1, обозначенную прицельной маркой, наводят на выбранную цель 2 и производят излучение лазерного зондирующего импульса. Одновременно начинают отсчет текущего времени t и принимают сигналы, отраженные в сторону приемника дальномера объектами, попавшими в створ луча 3. Типичные мешающие объекты 4-8 указаны на фиг.1а). Часть принятых сигналов от мешающих объектов можно подавить средствами селекции. Амплитудную селекцию осуществляют путем пороговой обработки сигналов с помощью порога срабатывания 10, который изменяют в функции времени (временная автоматическая регулировка порога - ВАРП). Временную селекцию обычно осуществляют путем ограничения интервала измеряемых дальностей (строб 11). Отраженные сигналы, не отселектированные имеющимися средствами автоматической селекции, отмечают как «цели» (первая цель, вторая цель и т.д.) и до каждого из этих сигналов определяют временную задержку Т относительно момента излучения зондирующего импульса. Эта задержка связана с дальностью R до соответствующего объекта известным соотношением T=2R/C, где с - скорость света. По измеренным задержкам Т формируют оценки дальности R* до каждого зарегистрированного объекта по обратному соотношению R*=cT/2. Запомненные значения R* поочередно выводят на индикатор, на котором также включают индексы целей в количестве, равном числу зарегистрированных оценок R*. На фиг.2 показан пример с четырьмя индексами, соответствующими четырем зарегистрированным целям фиг.1. Тот индекс, порядковый номер которого соответствует порядковому номеру выведенной на индикатор оценки дальности, отображают в импульсно-периодическом режиме - индекс «мигает» (фиг.2). В качестве индексов целей использованы децимальные точки стандартного цифрового индикатора (фиг.2б).
Индикация информации об общем количестве зарегистрированных целей и порядковом номере высвечиваемой дальности правильно ориентирует оператора в целевой обстановке, позволяя ему оперативно и безошибочно выделить истинную дальность до выбранной им цели. Этот вывод подтвержден результатами полигонных испытаний в сложной помехоцелевой обстановке.
Пример 1. На фиг.3 а) приведен пример такой сложной обстановки. В створе с выбранной целью - домом 2 (3425 м) находятся «куст» 7 (2840 м) и «лес» 8 (4650 м). Перекрестие визира наведено в центр цели так, что в поле зрения дальномера, обозначенное разрывом перекрестия, попали все три указанных объекта (Фиг.3б), и в результате произведенного измерения дальности зарегистрированы расстояния до каждого из них. На пятиразрядный индикатор дальности автоматически выведен следующий результат измерения (последняя цель).

Видны три индекса целей. Это означает, что в поле зрения дальномера зарегистрированы три объекта. Поэтому выявляют объекты, попавшие в поле дальномера, обозначенном размерами разрыва прицельного перекрестия, и оценивают их взаимное положение. По визуальной оценке выбранная цель занимает промежуточное положение между впереди расположенным кустом и лесом на заднем плане, на индикаторе выделен (мигает) индекс последней цели, значит, это ложный отсчет дальности. Выводят из памяти на индикатор дальность, которой соответствует второй выделенный индекс.

Принимают решение, что 3425 м - истинная дальность до выбранной цели.
Пример 2. Чтобы отселектировать помеху 7, можно навести прицельное перекрестие так, чтобы помеха была вне пределов разрыва перекрестия, обозначающего рабочее угловое поле дальномера (Фиг.3в). В этом случае в результате измерения оказываются зарегистрированными дальность до дома 2 (3425 м) и «леса» 8 (4650 м). На индикаторе высвечивается следующий результат измерения.

Индексы показывают наличие двух целей, причем на индикатор выведена вторая из них.
Поскольку поле дальномера наведено так, чтобы выбранная цель была первой, этот результат признают недостоверным и выводят следующую дальность. На индикаторе появляется следующий результат (Фиг.3в).

Эта дальность обозначена индексом как первая. Поэтому принимают решение, что 3425 м - истинная дальность.
Пример 3. Чтобы отселектировать помеху 8, можно навести прицельное перекрестие так, как показано на Фиг.3г), так, чтобы эта помеха была вне пределов разрыва перекрестия, соответствующего полю зрения дальномера. В этом случае в результате измерения оказываются зарегистрированными дальность до цели 2 (3425 м) и «куста» 7 (2840 м). На индикаторе высвечивается следующий результат измерения.

Мигающий индекс указывает, что замеренная дальность последняя. Наблюдаемая в визир крупноразмерная цель перекрывает расположенные за ней объекты, значит, дальность замерена именно до нее. Поэтому принимают решение, что 3425 м - истинная дальность.
Последний пример показывает, что благодаря предложенному способу при его правильном применении достоверный результат измерения дальности в сложной помеховой обстановке может быть получен сразу после замера, причем без опроса всех зарегистрированных дальностей, то есть за минимальное время и с максимальной достоверностью. В других рассмотренных случаях трудоемкость измерения и анализа результатов также минимальна, а результаты анализа в высокой степени достоверны.
Описанная методика измерений дальности позволяет оперативно производить измерение и уверенно принимать решение о полученных результатах. Этот вывод подтвержден результатами полигонных испытаний дальномера, в котором реализован предлагаемый способ. В испытаниях были задействованы как опытные операторы, обладающие профессиональными навыками работы с дальномерами, так и участники испытаний с минимальной подготовкой. Для всех операторов среднее время измерения предлагаемым способом в сложных условиях составляет 50-80% по сравнению с известными способами. Вероятность достоверного измерения в этих условиях возросла до 1,5-3 раз. Необходимо особо отметить, что при данном способе измерения дальности отпадает необходимость в ограничении диапазона измеряемых дальностей с помощью регулируемого строба 11. Это упрощает как аппаратуру дальномера, так и процедуру проведения измерений - за счет исключения органов регулирования и контроля строба и действий по его установке.
Таким образом, предлагаемый способ обеспечивает существенное сокращение времени измерения и повышение достоверности определения дальности до выбранной цели при наличии мешающих объектов.
Источники информации
1. В.А.Волохатюк, В.М.Кочетков, Р.Р.Красовский. Вопросы оптической локации. - М.: Советское радио, 1971. - С.151.
2. Лазерный прибор разведки ЛПР-1. Jane's Electro-Optic Systems. Ninth Edition 2003-2004, p.347.
3. Ермаков Б.А., Возницкий М.В. Получение и обработка информации в импульсных лазерных дальномерах. - Оптический журнал, 1993. - с.17 - прототип.
4. Пятиразрядный семисегментный цифровой индикатор ИЦП 10А-5/8К аА0.339.755 ТУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ БИНОКЛЬ-ДАЛЬНОМЕР | 2008 |
|
RU2381445C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2012 |
|
RU2516165C1 |
| ЛАЗЕРНЫЙ БИНОКЛЬ-ДАЛЬНОМЕР | 2010 |
|
RU2443976C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ВРЕМЕННОЙ ПРИВЯЗКИ ИМПУЛЬСНОГО СВЕТОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2451950C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2010 |
|
RU2439492C1 |
| ПРИЕМНИК ИМПУЛЬСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2511069C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2390724C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |

Изобретение относится к лазерной технике, а именно к лазерной дальнометрии. Техническим результатом изобретения является сокращение времени измерения и повышение достоверности определения дальности до выбранной цели при наличии мешающих объектов. Способ измерения дальности с помощью лазерного дальномера заключается в определении дальности до каждой из нескольких целей в поле зрения дальномера при одном излучении лазера, преобразовании результатов измерения в цифровую форму, запоминании результатов и поочередном их выводе на многоразрядный цифровой индикатор. В процессе индикации дальности до выбранной цели включают индексы зарегистрированных целей в количестве, равном количеству запомненных результатов измерения дальности. Индекс с порядковым положением, соответствующим порядковому номеру цели, дальность до которой выведена на индикатор, выделяют в режиме, позволяющем отличать этот выделенный индекс от других. После этого, если количество индексов целей более одного, выявляют наблюдаемые в створе с выбранной целью объекты в количестве, равном количеству включенных индексов. Поочередно выводят на индикатор запомненные результаты измерения и, учитывая взаимное положение выявленных объектов и соответствующих им индексов целей, принимают за достоверный результат тот, выделенный индекс которого по своему порядковому положению соответствует порядковому положению выбранной цели относительно других выявленных в поле зрения дальномера объектов. 3 з.п. ф-лы, 3 ил.
1. Способ измерения дальности с помощью лазерного дальномера, заключающийся в определении дальности до каждой из нескольких целей в поле зрения дальномера при одном излучении лазера, преобразовании результатов измерения в цифровую форму, запоминании результатов и поочередном их выводе на многоразрядный цифровой индикатор, отличающийся тем, что в процессе индикации дальности до выбранной цели включают индексы зарегистрированных целей в количестве, равном количеству запомненных результатов измерения дальности, а индекс с порядковым положением, соответствующим порядковому номеру цели, дальность до которой выведена на индикатор, выделяют в режиме, позволяющем отличать этот выделенный индекс от других, например, включают его в импульсно-периодическом режиме, после этого, если количество индексов целей более одного, выявляют наблюдаемые в створе с выбранной целью объекты в количестве, равном количеству включенных индексов, поочередно выводят на индикатор запомненные результаты измерения и, учитывая взаимное положение выявленных объектов и соответствующих им индексов целей, принимают за достоверный результат тот, выделенный индекс которого по своему порядковому положению соответствует порядковому положению выбранной цели относительно других выявленных в поле зрения дальномера объектов.
2. Способ по п.1, отличающийся тем, что выделенный индекс включают в режиме повышенной яркости.
3. Способ по п.1, отличающийся тем, что в качестве индексов целей включают децимальные точки многоразрядного цифрового индикатора.
4. Способ по п.1, отличающийся тем, что первой выводят на индикатор дальность до последней зарегистрированной цели, а вывод других дальностей на индикатор осуществляют в обратном порядке следования целей по дальности.
| JP 60135813 A, 19.07.1985 | |||
| JP 60212746 A, 25.10.1985 | |||
| US 6433859 B1, 13.08.2002 | |||
| DE 10113641 A1, 02.10.2002 | |||
| US 2009079959 A1, 26.03.2009 | |||
| WO 2008155657 A2, 24.12.2008 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2176777C2 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ ПРИ ИЗМЕРЕНИИ ДАЛЬНОСТИ И СЕЛЕКТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2165072C1 |

