Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известны локационные способы измерения дальности до удаленных объектов. Известен способ измерения дальности до цели [1], включающий посылку на цель зондирующего лазерного импульса SL(t-t0), где t - текущее время, t0 - момент посылки, регистрацию момента посылки t0, прием отраженного целью излучения S(t-tD), регистрацию момента приема tD и определение временного интервала τ=tD-t0, по которому судят о дальности D до цели по формуле D=cτ/2, где c - скорость света. Согласно этому способу, регистрацию моментов излучения зондирующего импульса и приема отраженного сигнала (временную привязку) производят в момент превышения сигналом заданного порога (привязка по фронту). При таком способе погрешность временной привязки велика - порядка длительности фронта сигнала [2]. Другим недостатком описанного в [1] способа является невысокая точность определения временного интервала τ, поскольку в измерителях первого поколения использовались аналоговые методы измерения временных интервалов.
Наиболее близким по технической сущности к предлагаемому способу является способ временной привязки импульсного светолокационного сигнала S(t-tD) к сигналу тактовой частоты, синхронизированному с зондирующим импульсом SL(t), путем подсчета количества периодов T тактовой частоты от момента излучения зондирующего импульса, заключающийся в формировании массива {Si} выборочных значений сигнала S(t-tD), с периодом выборок T, и последующей временной привязке путем сравнения с цифровым шаблоном {SLi}, соответствующим зондирующему импульсу [3].
В указанном источнике сравнение массивов {SLi} и {Sj} производят путем последовательного сдвига массива {Si} на p=1, 2,…, Imax шагов, соответствующих периоду T тактовой последовательности, и определения на каждом шаге коэффициента корреляции  . Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=cPT/2, где c - скорость света. Максимальное количество шагов р=Imax соответствует предельной измеряемой дальности Dmax и определяется выражением Imax=2Dmax/cT.
. Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=cPT/2, где c - скорость света. Максимальное количество шагов р=Imax соответствует предельной измеряемой дальности Dmax и определяется выражением Imax=2Dmax/cT.
При таком методе фиксации временного положения принятого сигнала S(t), представленного массивом своих выборочных значений {Si}, точность измерения дальности определяется дискретностью тактового сигнала T.
Задачей изобретения является повышение точности определения дальности. Указанная задача решается за счет того, что в известном способе временной привязки импульсного светолокационного сигнала S(t), где t - текущее время, к сигналу тактовой частоты с периодом T, синхронизированному с зондирующим импульсом SL(t), заключающемся в формировании массива {Si} выборочных значений сигнала S(t), с периодом выборок T, и последующей временной привязке путем сравнения с цифровым шаблоном, соответствующим форме зондирующего импульса, цифровой шаблон формируют путем оцифровки зондирующего импульса SL(t), с периодом T, в результате чего образуют базовый массив {SLi}0 выборочных значений зондирующего импульса STi=SL(i·T), где i=1, …, I - индекс оцифровки; I=tи/T - количество выборок в массиве {SLi}0; tи - длительность импульса; после этого массив {SLi}0 интерполируют гладкой функцией SL*(t), а затем формируют массивы {SLi}w, где w=1, 2, …, W, образуемые по формуле SLiw=SL*(tiw), где tiw=(w-1)T/W+(i-1)T, причем при формировании массива {SLi}0 начало отсчета времени t=0 выбирают так, чтобы на период от этого момента до вершины зондирующего импульса приходилось не менее чем два периода T тактовой частоты, количество W дополнительных массивов выбирают из условия 2≤W≤T/ΔT, где ΔT - неустранимая аппаратурная погрешность временной привязки, а в процессе временной привязки светолокационного сигнала массив его выборочных значений сравнивают с каждым из массивов {SLi}w в результате чего формируют W оценок Rw=R({S1i}w, {S2i}), характеризующих близость массивов {S1i}w и {S2i}, например, в виде суммарного абсолютного отклонения  , определяют порядковый номер w*, при котором оценка Rw в наибольшей степени характеризует близость массивов {S1i}w и {S2i}, и формируют поправку Tt временной привязки относительно импульса тактовой частоты, совпадающего с началом сигнала S(t), по формуле Tt=ΔN·T, где ΔN=(w*-1)/W, T - период тактовой частоты.
, определяют порядковый номер w*, при котором оценка Rw в наибольшей степени характеризует близость массивов {S1i}w и {S2i}, и формируют поправку Tt временной привязки относительно импульса тактовой частоты, совпадающего с началом сигнала S(t), по формуле Tt=ΔN·T, где ΔN=(w*-1)/W, T - период тактовой частоты.
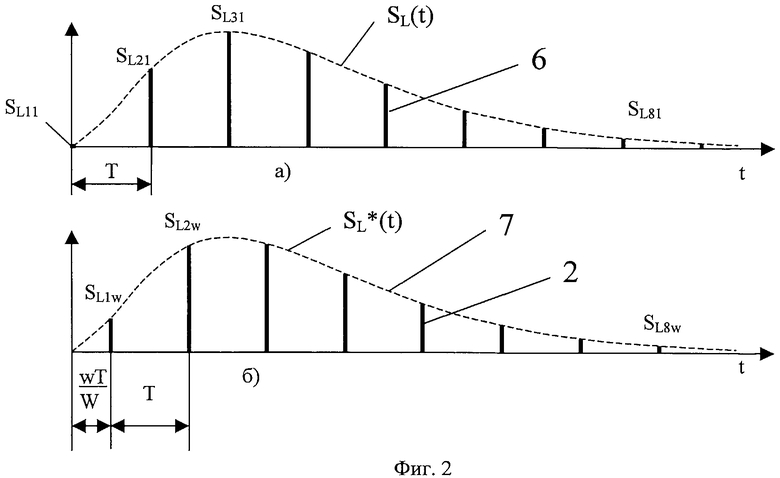
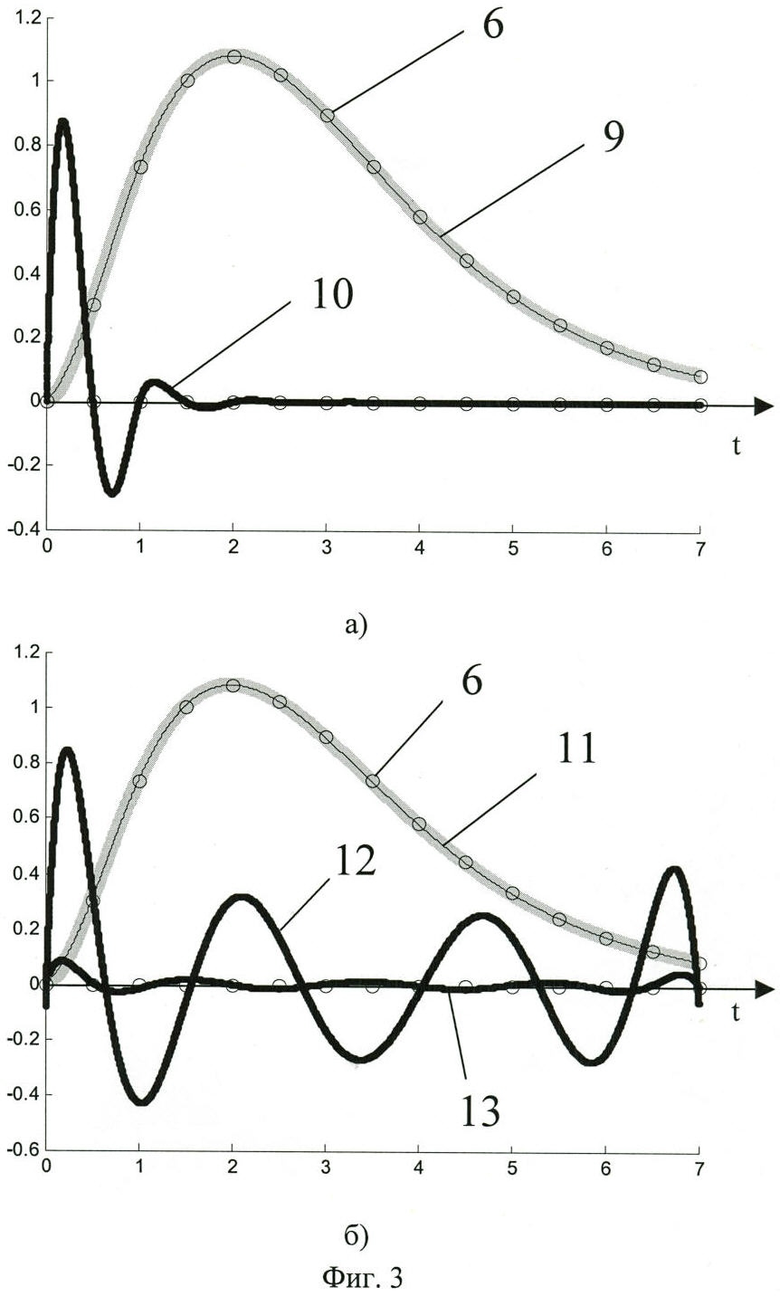
На Фиг.1 представлена временная диаграмма процесса зондирования, его привязки к тактовой частоте и формирования массивов {SLi} и {Si}. Фиг.2 иллюстрирует принцип формирования массивов {SLi}w=1 и {SLi}w=w. На фиг.3а) и б) приведены результаты представления функции SL*(t) соответственно кубическими сплайнами и по методу наименьших квадратов.
В момент времени t=0 в направлении цели посылают зондирующий импульс SL(t) 1, представленный массивами своих выборочных значений {SLi}w. Один из таких массивов 2 показан на фиг.1. Момент t=0 излучения зондирующего импульса 1 привязан к тактовой последовательности 4 путем присвоения импульсу тактовой последовательности, совпадающему с моментом t=0, порядкового номера i=0. Тактовые импульсы генерируют с помощью высокостабильного источника с частотой FT=1/T, где T - период следования тактовых импульсов.
После излучения зондирующего импульса принимают отраженный целью импульс S(t) 3 и производят его оцифровку с периодом тактовой частоты T. Результаты оцифровки сохраняют в массиве {Si} 5, который затем сравнивают с каждым из массивов {SLi}w, образуемых следующим образом.
Базовый массив {SLi}1 6 формируют путем предварительной оцифровки зондирующего сигнала 1, заключающейся в пробном излучении зондирующего сигнала 1, его преобразовании в электрический сигнал, выделении и регистрации его выборочных значений 6 с периодом T, как это показано на фиг.2а). Вслед за этим производят интерполяцию массива {SLi}0 гладкой функцией SL*(t). Эта функция 7 показана на фиг.2. Построив функцию SL*(t), формируют W массивов ее выборочных значений 2. Каждый из этих массивов образуют по формуле


 ;
;  .
.
Формирование шаблона в виде W массивов, формируемых по формуле (1), и осуществление временной привязки массива {Si} путем его поочередного сравнения с каждым из этих массивов {SLi}w дает возможность уменьшить дискретность измерения дальности в W раз, поскольку результаты такого сравнения зависят от порядкового номера массива {SLi}w. Благодаря этому существенно повышается точность измерения без увеличения тактовой частоты FT.
Рассмотренный способ формирования шаблона позволяет произвести оцифровку зондирующего сигнала стандартными техническими средствами без увеличения тактовой частоты и без необходимости многократных пробных зондирований с введением сдвига оцифровки tw=wT/W при каждом таком зондировании. Это позволяет исключить аппаратные ошибки формирования шаблона, связанные с погрешностью задания сдвига tw, неоднозначностью воспроизведения амплитуды и формы сигнала при каждом пробном зондировании, воздействии помех и других факторов, присущих аналого-цифровой обработке. На фиг.3 показаны примеры интерполяции зондирующего сигнала SL(t) 1, представленного массивом своих выборочных значений {SLi}0 6, с помощью кубических сплайнов (кривая 9) и аппроксимации по методу наименьших квадратов (кривая 11) [4]. Ошибки аппроксимации показаны на тех же графиках в масштабе 50:1 - кривая 10 при сплайн-интерполяции и кривые 12, 13 - при аппроксимации полиномами соответственно степени 7 и 9. При любом из указанных методов аппроксимации предлагаемый способ при оцифровке массивов {SLi}w обеспечивает погрешность порядка 0,1% и менее. Такая точность недостижима при непосредственном аналого-цифровом преобразовании зондирующего сигнала.
Данный способ реализован в экспериментальном образце лазерного дальномера со следующими характеристиками. Тактовая частота FT=25 МГц (тактовый период T=40 нс, что соответствует дискретности по дальности ΔD=6 м). Количество массивов W=100. Общее количество выборок в каждом массиве {SLi}w K=5. Среднеквадратичная ошибка измерения дальности не превышает 0,06 м и определяется неустранимой аппаратурной погрешностью временной привязки. У известных дальномеров ошибка измерения в десятки раз больше этой величины.
Предлагаемый способ по сравнению с известными способами обеспечивает значительно более точную оценку положения отраженного сигнала по массиву его выборочных значений в условиях воздействия шумов, в том числе, при многократном зондировании и накоплении данных. В результате обеспечивается существенное повышение точности определения дальности до цели.
Источники информации
1. В.А.Волохатюк, В.М.Кочетков, P.P.Красовский. Вопросы оптической локации. - М.: Советское радио, 1971 г., с.176.
2. Е.А.Мелешко. Интегральные схемы в наносекундной ядерной электронике. - М.: Атомиздат, 1977, с.77.
3. United States Patent No 5805468, September 8, 1998, Method and apparatus for determining the light transit time over a measurement path arranged between a measuring apparatus and a reflecting object. - Прототип.
4. И.Н.Бронштейн, K.A.Семендяев. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА | 2011 |
|
RU2451962C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2451904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2390724C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2558694C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
Изобретение относится к лазерной технике, а именно к лазерной дальнометрии. Технический результат изобретения заключается в повышении точности определения дальности до цели. Способ временной привязки импульсного светолокационного сигнала к сигналу тактовой частоты, синхронизированному с зондирующим импульсом, заключается в формировании массива выборочных значений сигнала и последующей временной привязке путем сравнения с цифровым шаблоном, соответствующим форме зондирующего импульса. Цифровой шаблон формируют путем оцифровки зондирующего импульса, в результате чего образуют базовый массив выборочных значений зондирующего импульса; после этого массив интерполируют гладкой функцией, а затем формируют дополнительные массивы. В процессе временной привязки светолокационного сигнала массив его выборочных значений сравнивают с каждым из дополнительных массивов, в результате чего формируют оценки, характеризующие близость базового и дополнительных массивов, например, в виде суммарного абсолютного отклонения, определяют порядковый номер, при котором оценка в наибольшей степени характеризует близость массивов, и формируют поправку временной привязки относительно импульса тактовой частоты, совпадающего с началом сигнала. 3 ил.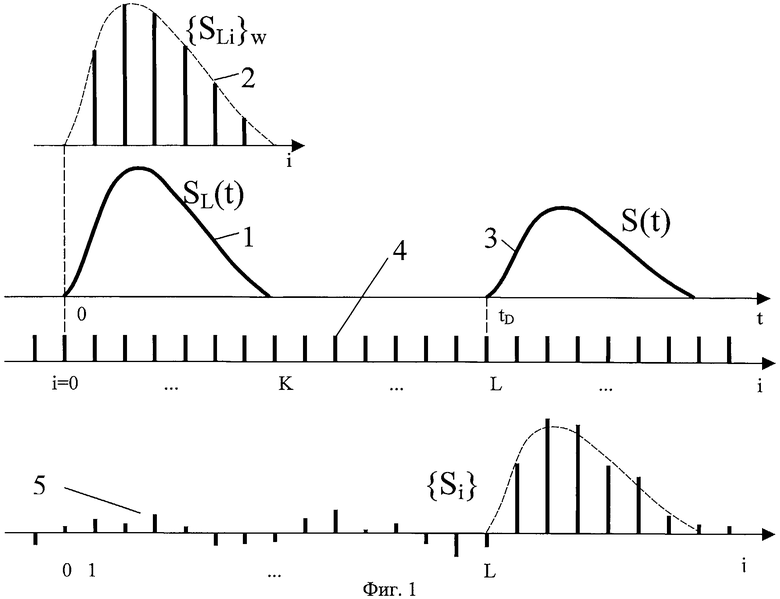
Способ временной привязки импульсного светолокационного сигнала S(t), где t - текущее время, к сигналу тактовой частоты с периодом Т, синхронизированному с зондирующим импульсом SL(t), заключающийся в формировании массива {Si} выборочных значений сигнала S(t) с периодом выборок Т и последующей временной привязке путем сравнения с цифровым шаблоном, соответствующим форме зондирующего импульса, отличающийся тем, что цифровой шаблон формируют путем оцифровки зондирующего импульса SL(t) с периодом Т, в результате чего образуют базовый массив {SLi}0 выборочных значений зондирующего импульса STi=SL(i·T), где i=1, …, I - индекс оцифровки; I=tи/T - количество выборок в массиве {SLi}0; tи - длительность импульса; после этого массив {SLi}0 интерполируют гладкой функцией SL*(t), а затем формируют массивы {SLi}w, где w=1, 2, …, W, образуемые по формуле SLiw=SL*(tiw), где tiw=(w-1)T/W+(i-1)T, причем при формировании массива {SLi}0 начало отсчета времени t=0 выбирают так, чтобы на период от этого момента до вершины зондирующего импульса приходилось не менее чем два периода Т тактовой частоты, количество W дополнительных массивов выбирают из условия 2≤W≤T/ΔT, где ΔT - неустранимая аппаратурная погрешность временной привязки, а в процессе временной привязки светолокационного сигнала массив его выборочных значений сравнивают с каждым из массивов {SLi}w, в результате чего формируют W оценок Rw=R({S1i}w, {S2i}), характеризующих близость массивов {S1i)w и {S2i}, например, в виде суммарного абсолютного отклонения  , определяют порядковый номер w*, при котором оценка Rw в наибольшей степени характеризует близость массивов {S1i}w и {S2i}, и формируют поправку Тt временной привязки относительно импульса тактовой частоты, совпадающего с началом сигнала S(t), по формуле Tt=ΔN·T, где ΔN=(w*-1)/W, Т - период тактовой частоты.
, определяют порядковый номер w*, при котором оценка Rw в наибольшей степени характеризует близость массивов {S1i}w и {S2i}, и формируют поправку Тt временной привязки относительно импульса тактовой частоты, совпадающего с началом сигнала S(t), по формуле Tt=ΔN·T, где ΔN=(w*-1)/W, Т - период тактовой частоты.
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2390724C2 |
| US 5805468 А, 08.09.1998 | |||
| US 2010128247 A1, 27.05.2010 | |||
| JP 2002368720 A, 20.12.2002 | |||
| US 5179286 A, 12.01.1993. | |||

