Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известны способы лазерного зондирования удаленных объектов для получения информации об их дальности и других характеристиках. Известен способ определения дальности, включающий посылку на цель лазерного импульса S0(t,t0), регистрацию момента посылки t0, прием отраженного целью излучения S(t,t0), регистрацию момента приема tD и определение временного интервала τ=tD-t0, по которому судят о дальности D до цели [1] по формуле D=сτ/2, где с - скорость света. Согласно этому способу, регистрацию момента приема отраженного сигнала (временную привязку) производят в момент превышения сигналом заданного порога (привязка по фронту сигнала). При таком способе погрешность временной привязки велика - порядка длительности фронта принятого сигнала [2]. Другим недостатком описанного в [1] способа является невысокая точность определения временного интервала τ, поскольку в измерителях первого поколения использовались аналоговые методы измерения временных интервалов.
Наиболее близким по технической сущности к предлагаемому способу является способ определения дальности, включающий формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t,t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных [значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t,tD), его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, причем t - текущее время, t0 - момент излучения зондирующего сигнала, t0 - момент приема отраженного целью сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, К=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала; Dmax - максимальная измеряемая дальность, с - скорость света [3].
В указанном источнике сравнение массивов {S0i} и {Sj} производят путем последовательного сдвига массива {Sj} на р=1,2,…Jmax шагов, соответствующих шагу Т тактовой последовательности и определения на каждом шаге коэффициента корреляции  . Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=сРТ/2, где с - скорость света.
. Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=сРТ/2, где с - скорость света.
При таком методе фиксации временного положения принятого сигнала S(t,tD), представленного массивом своих выборочных значений {Sj}, обычно возникает проблема определения максимального значения зависимости  вследствие того, что функции такого типа имеют плоскую вершину. Из-за этого возможно ошибочное определение максимума при искажении выборочных значений помехами, шумами, ошибками округления и т.п. Для устранения этого в известном техническом решении [3] определяют максимум функции R(p) не по самой вершине, а по точке пересечения касательных к ее фронту и спаду. При этом теряется преимущество корреляционного метода как оптимальной реализации функции отношения правдоподобия [4] и появляются дополнительные источники ошибки, связанные с искажениями фронтов функции R(p), например, вследствие нелинейных искажений.
вследствие того, что функции такого типа имеют плоскую вершину. Из-за этого возможно ошибочное определение максимума при искажении выборочных значений помехами, шумами, ошибками округления и т.п. Для устранения этого в известном техническом решении [3] определяют максимум функции R(p) не по самой вершине, а по точке пересечения касательных к ее фронту и спаду. При этом теряется преимущество корреляционного метода как оптимальной реализации функции отношения правдоподобия [4] и появляются дополнительные источники ошибки, связанные с искажениями фронтов функции R(p), например, вследствие нелинейных искажений.
Задачей изобретения является повышение точности определения дальности.
Указанная задача решается за счет того, что в известном способе определения дальности, включающем формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t,t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t,tD), его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, причем t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного целью сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, K=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала, Dmax - максимальная измеряемая дальность, с - скорость света, производят сравнение массивов {S0i} и {Sj} путем генерации чисел 1≤р≤Jmax, формирования массивов выборочных значений принятого сигнала в виде {Sjp}={Sp-1+i}, где i=1…K, и определения величин R (р) в виде суммы абсолютных отклонений  , затем из этого ряда выделяют величину с минимальным значением Rmin(p), определяют соответствующее ей значение параметра p(Rmin)=Р и вычисляют дальность D до цели по формуле D=сРТ/2, причем массивы {S0i} и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны.
, затем из этого ряда выделяют величину с минимальным значением Rmin(p), определяют соответствующее ей значение параметра p(Rmin)=Р и вычисляют дальность D до цели по формуле D=сРТ/2, причем массивы {S0i} и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны.
Массив {S0i} можно получать путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0i с периодом Т.
Зондирование цели можно производить многократно, а выборочные значения принятого сигнала в каждой j-й позиции массива {Sj} формировать в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
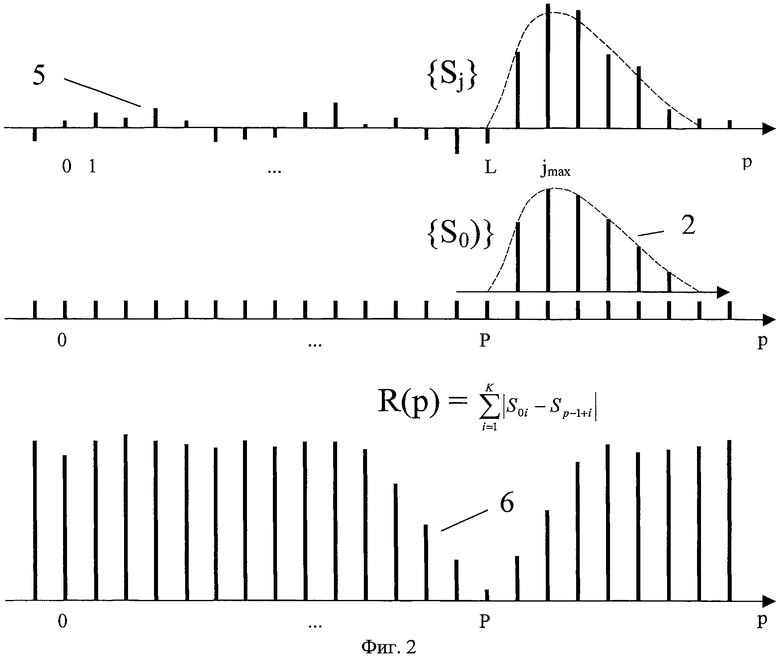
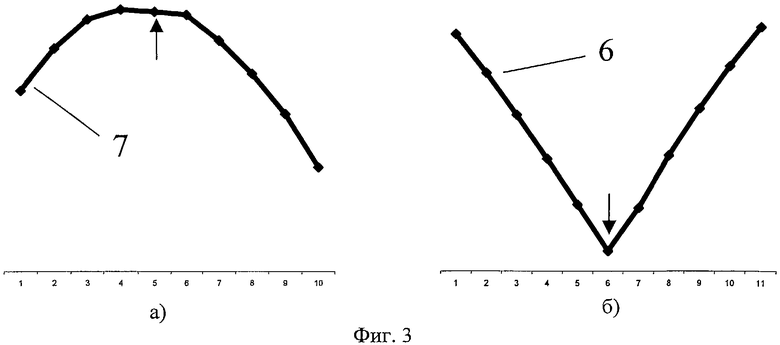
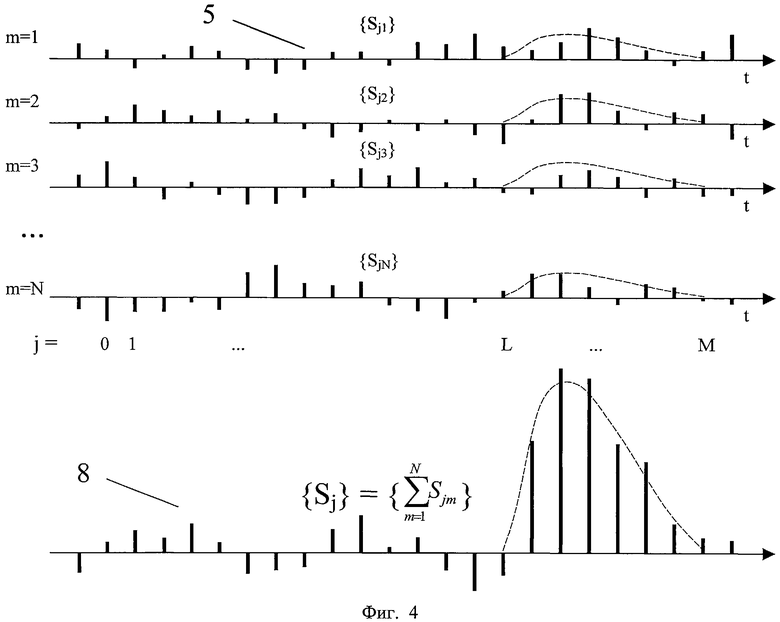
На Фиг.1 представлена временная диаграмма процесса зондирования, его привязки к тактовой частоте и формирования массивов {S0i} и {Sj}. Фиг.2 иллюстрирует формирование функции  . На Фиг.3 показаны зависимости R(p) для известного а) и предлагаемого б) способов. Фиг.4 поясняет процесс накопления данных при многократном зондировании.
. На Фиг.3 показаны зависимости R(p) для известного а) и предлагаемого б) способов. Фиг.4 поясняет процесс накопления данных при многократном зондировании.
В момент времени t0 в направлении цели посылают зондирующий импульс S0(t,t0) 1, представленный массивом своих выборочных значений {S0i} 2 и затем принимают отраженный целью импульс S(t,tD) 3. Момент t0 излучения зондирующего импульса 1 привязан к тактовой последовательности 4 путем присвоения импульсу тактовой последовательности, совпадающему с моментом t0, порядкового номера i=0. Тактовые импульсы генерируют с помощью высокостабильного источника с частотой FT=1/Т, где Т - период следования тактовых импульсов. Зондирующему импульсу 1 соответствует массив 2 его выборочных значений {S0i}. Массив 2 получают предварительно путем пробной посылки зондирующего импульса и его оцифровки с тактовой частотой fT. Массив 2 сохраняют в памяти системы и обновляют его в процессе подготовки к измерениям каждый раз, когда это требуется по условиям метрологической калибровки. Принятый сигнал 3 оцифровывают путем определения его выборочных значений S(i) в моменты генерации каждого j-го тактового импульса; нумерация отсчетов S(j) ведется от тактового импульса с номером j=0, совпадающего с моментом t0. Полученные выборочные значения сохраняют в массиве {Sj} (5, Фиг.2), хранящемся в памяти системы. Массивы {S0i} и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны. При этом минимизируется вредное влияние шумов и динамических искажений на последующую обработку данных. После нормировки формируют оценочную функцию R(p) 6 путем последовательной генерации чисел р=1,2,…Pmax и определения для каждого р величины  , где Pmax=2Dmax/cT, Dmax - максимальная измеряемая дальность, с - скорость света. Затем определяют минимальное значение Rmin(p) и значение шага Р=p(Rmin), соответствующего этому значению. При таком способе построения функции R(p) ее минимум выражен отчетливо и его положение относительно тактовой последовательности значительно менее подвержено влиянию шумов и других искажений, чем положение максимума функции R(p) согласно известному решению [3]. На фиг.3 приведены результаты моделирования при определении R(p) для зондирующего сигнала S0(t,t0) длительностью tи=50 нс, отношения сигнал/шум А=56, объеме накопления N=128 и длительности периода тактовой частоты Т=6,67 нс, что соответствует дискретности измерения дальности ΔD=1 м. На фиг.3а) показан результат моделирования по методу [3]
, где Pmax=2Dmax/cT, Dmax - максимальная измеряемая дальность, с - скорость света. Затем определяют минимальное значение Rmin(p) и значение шага Р=p(Rmin), соответствующего этому значению. При таком способе построения функции R(p) ее минимум выражен отчетливо и его положение относительно тактовой последовательности значительно менее подвержено влиянию шумов и других искажений, чем положение максимума функции R(p) согласно известному решению [3]. На фиг.3 приведены результаты моделирования при определении R(p) для зондирующего сигнала S0(t,t0) длительностью tи=50 нс, отношения сигнал/шум А=56, объеме накопления N=128 и длительности периода тактовой частоты Т=6,67 нс, что соответствует дискретности измерения дальности ΔD=1 м. На фиг.3а) показан результат моделирования по методу [3]  На фиг.3б) показана функция
На фиг.3б) показана функция  , соответствующая предлагаемому решению. Деление оси абсцисс соответствует дискретности по дальности ΔR=1 м. Видно, что несмотря на сравнительно высокое отношение сигнал/шум результат, полученный по известному методу, указывает на положение сигнала с ошибкой: максимум полученной функции 7 не совпадает с истинным положением, указанным на фиг.3а) стрелкой. Функция 6, сформированная по предлагаемому методу, более устойчива к шумовым искажениям. Ее минимум совпадает с истинным положением, также показанным стрелкой. На фиг 4 проиллюстрирован процесс накопления массива {Sj} 8 путем N-кратного зондирования и поэлементного суммирования массивов {Sjm}, где m=1,2,…,N. При этом обеспечивается улучшение отношения сигнал/шум в
, соответствующая предлагаемому решению. Деление оси абсцисс соответствует дискретности по дальности ΔR=1 м. Видно, что несмотря на сравнительно высокое отношение сигнал/шум результат, полученный по известному методу, указывает на положение сигнала с ошибкой: максимум полученной функции 7 не совпадает с истинным положением, указанным на фиг.3а) стрелкой. Функция 6, сформированная по предлагаемому методу, более устойчива к шумовым искажениям. Ее минимум совпадает с истинным положением, также показанным стрелкой. На фиг 4 проиллюстрирован процесс накопления массива {Sj} 8 путем N-кратного зондирования и поэлементного суммирования массивов {Sjm}, где m=1,2,…,N. При этом обеспечивается улучшение отношения сигнал/шум в  раз [5]. В частности, в приведенном примере эквивалентное отношение сигнал/шум
раз [5]. В частности, в приведенном примере эквивалентное отношение сигнал/шум  .
.
Предлагаемый способ реализован в экспериментальном образце лазерного дальномера. Дальномер работает в режиме накопления с частотой зондирований 8000 Гц, длительностью импульса tи>100 нс и тактовым периодом дискретизации Т=40 нс, что соответствует дискретности по дальности ΔD=6 м. Эти параметры обеспечивают высокую эквивалентную энергию зондирующего импульса и при этом реализуются сравнительно простыми аппаратными средствами на стандартной элементной базе. Объем накопления N устанавливается автоматически в зависимости от величины отраженного сигнала - от N=128 при сильном сигнале до N=8000 при слабом сигнале. Среднеквадратичная ошибка измерения дальности не превышает 0,06 м. У известных дальномеров ошибка измерения в десятки раз больше этой величины.
Предлагаемый способ определения дальности по сравнению с известными способами обеспечивает более надежное определение оценочной функции положения отраженного сигнала по массиву его выборочных значений в условиях воздействия шумов, в том числе при многократном зондировании и накоплении данных. В результате обеспечивается повышение точности определения дальности.
Источники информации
1. В.А.Волохатюк, В.М.Кочетков, P.P.Красовский "Вопросы оптической локации". - М.: Изд. "Советское радио", 1971 г., с.176.
2. Е.А.Мелешко «Интегральные схемы в наносекундной ядерной электронике». - М.: Атомиздат, 1977, с.77.
3. United States Patent No 5805468, September 8, 1998, Method and apparatus for determining the light transit time over a measurement path arranged between a measuring apparatus and a reflecting object. - Прототип.
4. B.E.Гмурман «Теория вероятностей и математическая статистика». - М.: Высшая школа, 1977.
5. Я.Д.Ширман, В.Н.Манжос. «Теория и техника обработки радиолокационной информации на фоне помех». - М.: Изд. «Радио и связь», 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2451904C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |
| СПОСОБ ВРЕМЕННОЙ ПРИВЯЗКИ ИМПУЛЬСНОГО СВЕТОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2451950C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА | 2011 |
|
RU2451962C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
Способ включает формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t,t0) длительностью ts>T, форма которого соответствует последовательности его выборочных значений S0i массива {S0i}. Прием отраженного сигнала S(t,tD), его оцифровку и определение временного положения относительно зондирующего сигнала, причем t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i, K=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj, Jmax=2Dmax/cT - количество выборок принятого сигнала, Dmax - максимальная измеряемая дальность, с - скорость света. Производят сравнение массивов {S0i} и {Sj} путем генерации чисел 1≤p≤Jmax, к формирования массивов {Sjp}={Sp-1+i} и определения  . Выделяют величину с минимальным значением Rmin(p), определяют значение p(Rmin)=P и вычисляют дальность D=cPT/2. Массив {S0i} получают предварительной оцифровкой зондирующего сигнала, зондирование цели производят N≥1 раз. Выборочные значения принятого сигнала формируют в виде суммы
. Выделяют величину с минимальным значением Rmin(p), определяют значение p(Rmin)=P и вычисляют дальность D=cPT/2. Массив {S0i} получают предварительной оцифровкой зондирующего сигнала, зондирование цели производят N≥1 раз. Выборочные значения принятого сигнала формируют в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования. Технический результат - повышение точности определения дальности. 4 ил.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования. Технический результат - повышение точности определения дальности. 4 ил.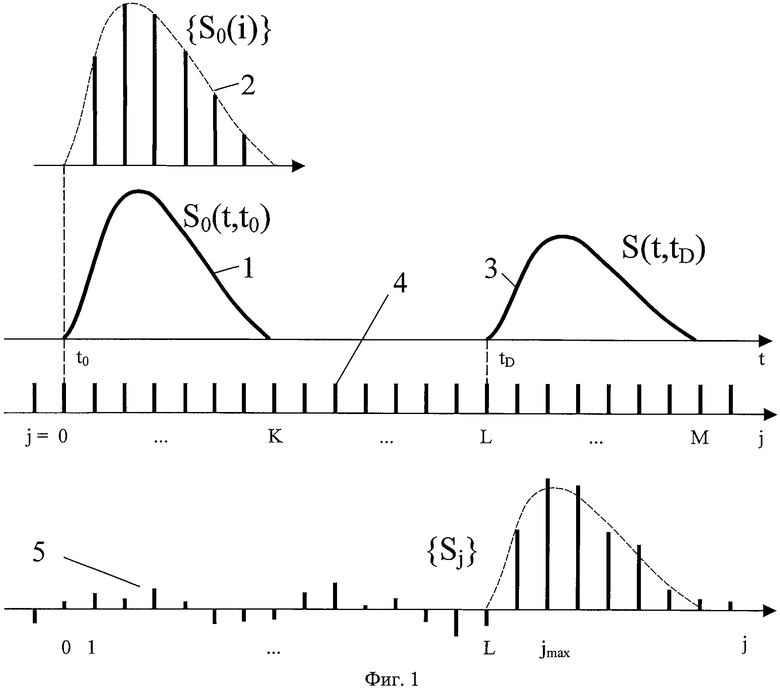
Способ определения дальности, включающий формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t,t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t,tD), его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, причем t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного целью сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, K=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала, Dmax - максимальная измеряемая дальность, с - скорость света, отличающийся тем, что производят сравнение массивов {S0i} и {Sj} путем генерации чисел 1≤p≤Jmax, формирования массивов выборочных значений принятого сигнала в виде {Sjp}={Sp-1+i}, где i=1…K, и определения величин R(p) в виде суммы абсолютных отклонений  , затем из этого ряда выделяют величину с минимальным значением Rmin(p), определяют соответствующее ей значение параметра p(Rmin)=P и вычисляют дальность D до цели по формуле D=cPT/2, причем массивы {S0i} и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны, а массив {S0i} получают путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0i с периодом Т, при этом зондирование цели производят N≥1 раз, а выборочные значения принятого сигнала в каждой j-й позиции массива {Sj} формируют в виде суммы
, затем из этого ряда выделяют величину с минимальным значением Rmin(p), определяют соответствующее ей значение параметра p(Rmin)=P и вычисляют дальность D до цели по формуле D=cPT/2, причем массивы {S0i} и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны, а массив {S0i} получают путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0i с периодом Т, при этом зондирование цели производят N≥1 раз, а выборочные значения принятого сигнала в каждой j-й позиции массива {Sj} формируют в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
| US 5805468 А, 08.09.1998 | |||
| US 2010042362 А1, 18.02.2010 | |||
| US 6516286 B1, 04.02.2003 | |||
| US 2003048430 A1, 13.03.2003 | |||
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА | 2007 |
|
RU2352903C1 |

