Изобретение относится к устройствам для обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, в частности для обнаружения вредных веществ в вагонах, и может быть использовано на контрольно-пропускных пунктах пограничных железнодорожных станций.
Известен контроль груза в закрытых крупногабаритных объемах, осуществляемый путем измерения интенсивности излучения в совокупности точек, геометрически жестко привязанных к поверхности объема, при котором крупногабаритный объем облучают с двух противоположных сторон поочередно импульсным потоком быстрых нейтронов с отдельной регистрацией излучения в проходящей через объем геометрии, и в геометрии рассеянного излучения в период нейтронных импульсов, и в промежутках между ними после окончания облучения всего объема, повторяют регистрацию энергетического спектра излучения изотопов, образованных в результате нейтронной активации, а полученные данные сопоставляют с известными значениями нейтронных параметров различных сред, а также по положению аналитических линий неупругого рассеяния, радиационного захвата и радиоактивных изотопов судят о составе груза и его размещении в закрытом объеме (RU 2239821, G01N 23/00, 2002).
Недостатком известного технического решения является обязательный охват облучающими приборами всего осматриваемого транспортного средства. Для осмотра состава вагонов потребуются значительные финансовые вложения на обустройство стационарных или передвижных порталов.
Наиболее близким по технической сущности и достигаемому результату является устройство контроля для проверки объекта, содержащее закрытое средство перемещения, снабженное ограждающим кузовом, источник проникающего излучения, полностью заключенный в кузове закрытого средства перемещения с возможностью генерации проникающего излучения, пространственный модулятор, установленный с возможностью формирования проникающего излучения в пучок и облучения объекта по изменяющемуся во времени сечению сканирования, детекторный блок, предназначенный для размещения полностью внутри кузова закрытого средства перемещения во время проведения контроля и выдачи сигнала рассеяния на основе проникающего излучения, рассеянного содержимым объекта, и контроллер, являющийся средством выделения определенной характеристики содержимого объекта на основе, по крайней мере, сигнала рассеяния (RU 2334219, G01N 23/00, 2003).
Недостаток известного устройства состоит в отсутствии средств приближения источника излучения с детектором к осматриваемому транспортному средству.
Технический результат изобретения заключается в создании передвижного устройства для осмотра железнодорожных вагонов.
Технический результат достигается тем, что устройство для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, содержащее смонтированные на транспортном средстве источник излучения и детектор, соединенный посредством кабеля с источником питания и ЭВМ, согласно изобретению снабжено пластинчатым конвейером, на одной из пластин верхней ветви цепи которого закреплена каретка, на которой установлен источник излучения и детектор с ограниченным возвратно-поступательным перемещением по направляющим конвейера от ведущей звездочки до ведомой звездочки, установленной с разворотом в горизонтальной плоскости относительно ведущей звездочки, а кабель собран на барабане с возможностью одновременного сматывания и наматывания на него при перемещении указанной каретки с постоянным натяжением, причем пластинчатый конвейер установлен горизонтально и его звездочки закреплены на боковых стенках транспортного средства.
В местах разворота пластинчатого конвейера у торцевой стенки транспортного средства установлено по два верхних и нижних блока с возможностью контакта с боковинами соответствующей ветви цепи.
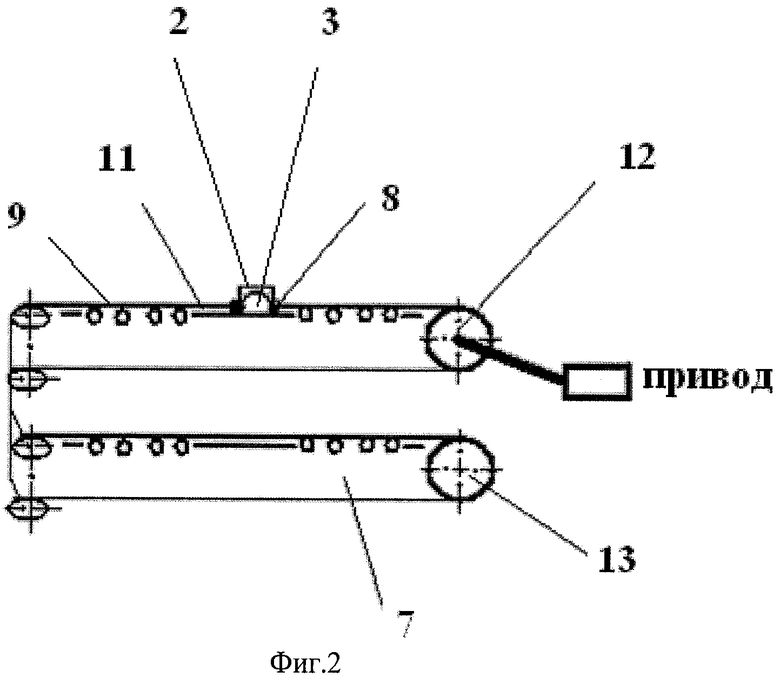
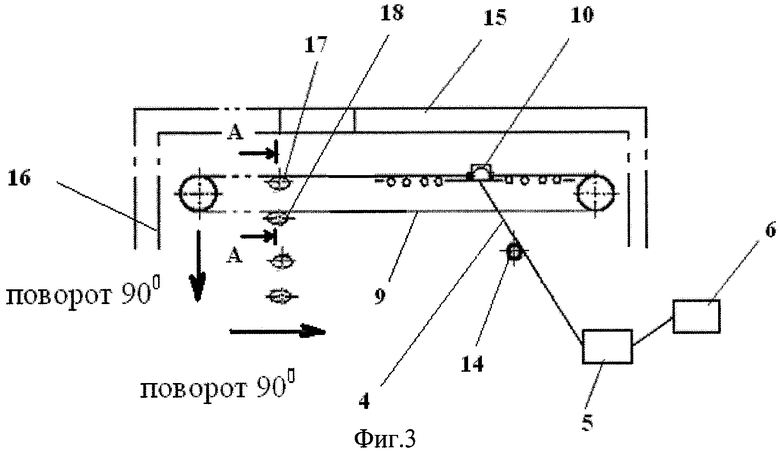
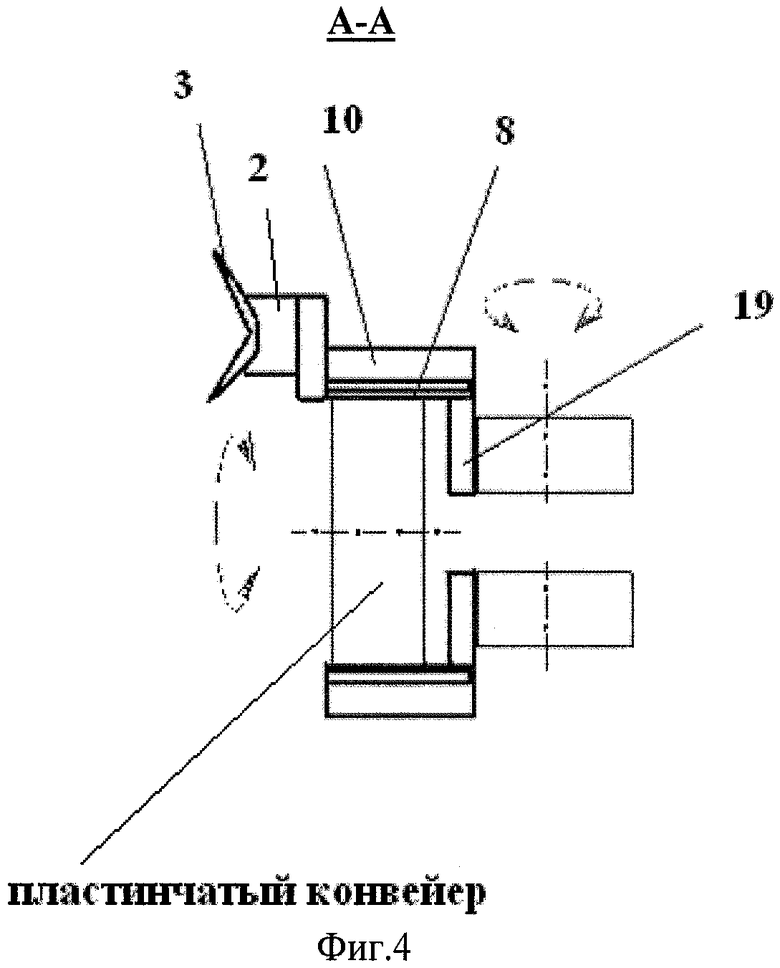
На фиг.1 показано размещение устройства в вагоне; на фиг.2 - пластинчатый конвейер с детектором; на фиг.3 - развернутое положение пластинчатого конвейера в вагоне и на фиг.4 - сечение по А-А на фиг.3.
Устройство для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, содержит смонтированные на транспортном средстве, например, в вагоне 1 источник излучения 2 и детектор 3, соединенный посредством кабеля 4 с источником питания 5 и ЭВМ 6. Устройство снабжено пластинчатым конвейером 7, на одной из пластин 8 верхней ветви цепи 9 которого закреплена каретка 10. На каретке 10 установлен источник излучения 2 и детектор 3 с ограниченным возвратно-поступательным перемещением по направляющим 11 конвейера 7 от ведущей звездочки 12 до ведомой звездочки 13. Последняя установлена с разворотом в горизонтальной плоскости относительно ведущей звездочки 12, а кабель 4 собран на барабане 14 с возможностью одновременного сматывания и наматывания на него при перемещении указанной каретки 10 с постоянным натяжением. Причем пластинчатый конвейер 7 установлен горизонтально в вагоне 1, а его звездочки 12 и 13 смонтированы на боковых стенках 15 вагона 1.
В местах разворота пластинчатого конвейера 7 у одной из торцевых стенок 16 вагона 1 установлено по два верхних 17 и нижних 18 блока с возможностью контакта с боковинами 19 пластин 8 соответствующей ветви цепи 9.
К микропроцессору ЭВМ 6 может быть подключены блок управления детектором, блок включения привода конвейера, блок управления перемещением детектора и блок регулирования мощности детектора (на чертеже не показаны).
Устройство работает следующим образом.
Вагон 1, оснащенный источником излучения 2 и детектором 3, подъезжает к осматриваемому составу вагонов по соседнему пути. Эти вагоны могут находиться в движении или в состоянии покоя. Затем включается аппаратура, и сигнал от источника излучения 2 охватывает каждый осматриваемый вагон в отдельности от крыши до его колес в поперечной плоскости. Просматриваемая зона на вагоне увеличивается по длине при перемещении каретки 10 с детектором 3 в вагоне 1 вдоль его боковой стороны, обращенной к осматриваемым вагонам. В вагоне 1 может быть выполнена продольная прорезь. Отраженный сигнал поступает в детектор 3 и далее в ЭВМ 6. После обработки сигнал отображается на экране ЭВМ 6. Оператор визуально по полученной картинкам от обработанных сигналов детектора 3 осматривает вагоны. В случае обнаружения в них наркотических или взрывчатых веществ детектор 3 подает звуковой и световой сигналы, указывающие на дисплее местоположение в вагоне этих веществ.
Если при проезде с одной стороны состава ничего не обнаружено, то вагон 1 подается на другой соседний путь. Осмотр другой боковой стороны состава вагонов производится таким же образом. Только каретка 10 с детектором 3 перемещается к другой боковой стене вагона. Это необходимо для максимального приближения детектора 3 к осматриваемым вагонам. Пластинчатый конвейер 7 при включенном приводе протягивает в соответствующую сторону цепь 9. При этом каретка 10, жестко закрепленная на пластине 8, горизонтально перемещается в направлении от ведущей звездочки 12 к ведомой звездочке 13 по огибающей траектории. Цепь 9 поворачивается в пространстве и меняет направление на обратное. В местах перегиба она скользит по блокам 17 и 18, установленным в верхней и нижней частях конвейера 7. Конвейер 7 раскладывается и складывается вручную при выключенном приводе. Звездочки 12 и 13 перезакрепляют на боковых стенках 15 в вагоне 1 при переноске ближе к его торцевой стенке 16. Конвейер 7 выполнен из легкого материала. Привод вмонтирован в ведущую звездочку 12. Конструкция конвейера 7 легко изменяется в пространстве внутри вагона 1. Блоки 17 и 18 крепятся на полу вагона 1 в местах перегиба конвейера 7 при контакте с боковинами 19 цепей 9. Таким образом, конвейер 7 переносится в любое место в вагоне 1 и закрепляется в новом месте.
Каретка 10 перемещается возвратно-поступательно по направляющим 11 только в верхней части «вперед-назад» сначала по одной боковой стенке 15 вагона 1, затем после разворота у торцевой стенки 16 по его другой боковой стенке 15. При этом звездочки 12 и 13 расположены вертикально.
После осмотра вагонов со второй стороны и необнаружения детектором 3 наркотических и взрывчатых веществ вагоны могут следовать дальше.
В зависимости от модели используемых детекторов 3, например оснащенных генераторами нейтронных лучей, рентгеновского или ионизирующего излучения, а также синтезаторами частот ЯКР (ядерный квадрупольный резонанс), устройство может обнаруживать взрывчатые и наркотические вещества в любых железнодорожных вагонах.
Возможен одновременный осмотр более мощным сигналом детектора 3 от источника питания 5 двух составов вагонов. Вагон 1 проходит или стоит на железнодорожном пути между ними. Детектор 3 на пластинчатом конвейере 7 останавливается в торцевой части вагона 1. Зона его действия увеличивается до размеров осмотра трех путей. Луч детектора 3 работает как у обычного прожектора на тепловозе. Только детектор 3 не освещает, а просвечивает. Тепловоз толкает впереди себя вагон 1. Оператор в этом случае осматривает сразу три пути: один путь, по которому он едет, и два соседних пути с установленными на них вагонами.
Эффективность устройства для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, заключается в дистанционном обнаружении наркотических и взрывчатых веществ в вагонах на железнодорожном транспорте за счет максимального приближения к ним источника излучения с детектором.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ, СКРЫТЫХ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2010 |
|
RU2425769C1 |
| Способ и система для обнаружения опасных веществ, находящихся в вагонах грузовых поездов с использованием метода меченых нейтронов | 2018 |
|
RU2690041C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715812C1 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
| Способ динамического радиационного контроля | 2020 |
|
RU2738661C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| СПОСОБ ДИНАМИЧЕСКОГО РАДИАЦИОННОГО КОНТРОЛЯ | 2010 |
|
RU2444029C2 |
| СИСТЕМА ДИСТАНЦИОННОГО РАДИАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА | 1999 |
|
RU2182343C2 |
Использование: для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте. Сущность: заключается в том, что устройство для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, содержит смонтированные на транспортном средстве источник излучения и детектор, соединенный посредством кабеля с источником питания и ЭВМ, при этом устройство снабжено пластинчатым конвейером, на одной из пластин верхней ветви цепи которого закреплена каретка, на которой установлен источник излучения и детектор с ограниченным возвратно-поступательным перемещением по направляющим конвейера от ведущей звездочки до ведомой звездочки, установленной с разворотом в горизонтальной плоскости относительно ведущей звездочки, а кабель собран на барабане с возможностью одновременного сматывания и наматывания на него при перемещении указанной каретки с постоянным натяжением, причем пластинчатый конвейер установлен горизонтально и его звездочки закреплены на боковых стенках транспортного средства. Технический результат: обеспечение возможности создания передвижного устройства для осмотра железнодорожных вагонов. 1 з.п. ф-лы, 4 ил.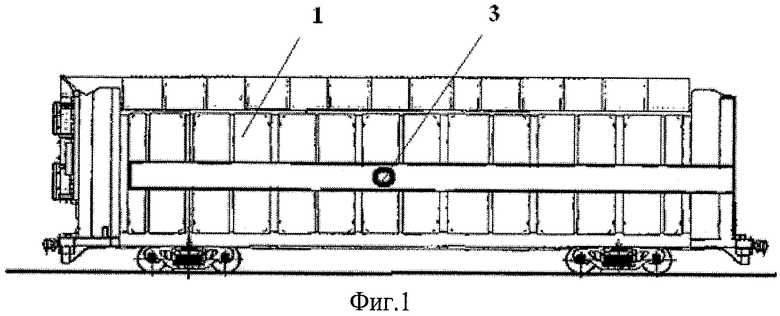
1. Устройство для дистанционного обнаружения объектов, скрытых в замкнутых объемах на железнодорожном транспорте, содержащее смонтированные на транспортном средстве источник излучения и детектор, соединенный посредством кабеля с источником питания и ЭВМ, отличающееся тем, что снабжено пластинчатым конвейером, на одной из пластин верхней ветви цепи которого закреплена каретка, на которой установлен источник излучения и детектор с ограниченным возвратно-поступательным перемещением по направляющим конвейера от ведущей звездочки до ведомой звездочки, установленной с разворотом в горизонтальной плоскости относительно ведущей звездочки, а кабель собран на барабане с возможностью одновременного сматывания и наматывания на него при перемещении указанной каретки с постоянным натяжением, причем пластинчатый конвейер установлен горизонтально и его звездочки закреплены на боковых стенках транспортного средства.
2. Устройство по п.1, отличающееся тем, что в местах разворота пластинчатого конвейера у торцевой стенки транспортного средства установлено по два верхних и нижних блока с возможностью контакта с боковинами соответствующей ветви цепи.
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
| УСТАНОВКА ДЛЯ ИНСПЕКЦИИ ОБЪЕКТОВ | 2006 |
|
RU2390762C2 |
| РУДОКОНТРОЛИРУЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2158917C2 |
| US 6424695 B1, 23.07.2002 | |||
| US 6252929 B1, 26.06.2001 | |||
| Приспособление к машине для проклейки углов сопряжения картонных щек со шпулей | 1931 |
|
SU33060A1 |

