Изобретение относится к устройствам обнаружения посторонних предметов и может быть использовано для контроля чистоты железнодорожного пути на перегонах и станциях.
Известно устройство, реализующее способ по патенту US 2003/0147484, кл. G21G 1/00, 2003 г. и содержащее смонтированный в стационарной камере источник проникающего излучения и детектор, соединенный посредством кабеля с источником питания и микропроцессором.
Недостатком устройства является невозможность работы на железнодорожном пути, так как предназначено для обнаружения скрытых объектов в движущихся по конвейеру предметах
Наиболее близким по технической сущности и достигаемому результату является устройство для дистанционного обнаружения объектов, скрытых на местности, содержащее смонтированные на самоходной тележке источник проникающего излучения, детектор, соединенный посредством кабеля с источником питания и микропроцессором с последовательно подключенными к нему блоками управления приводами перемещения самоходной тележки, блоком обработки информации и сигнализации и блоками управления детектором и телекамерой (US 6026135, кл. G21G 1/06, 2000).
Недостаток устройства состоит в затруднительном перемещении по железнодорожным путям из-за его громоздкости, и, следовательно, низкой эффективности осмотра и обнаружения скрытых предметов на железнодорожном пути.
Технический результат изобретения заключается в создании маневренного самоходного устройства, способного перемещаться между рельсами и переезжать рельсы при осмотре железнодорожного пути.
Технический результат достигается тем, что в устройстве для дистанционного обнаружения объектов, скрытых на железнодорожном пути, содержащем смонтированные на самоходной тележке источник проникающего излучения и детектор, соединенный посредством кабеля с источником питания и микропроцессором с подключенными к нему блоком управления приводами перемещения самоходной тележки, блоком обработки информации и сигнализации и блоками управления детектором и телекамерой, согласно изобретению введены два дополнительных детектора с соответствующими блоками управления, а на раме самоходной тележки установлена штанга с приводом поворота и блоком управления, причем два дополнительных детектора размещены на свободных концах штанги, а третий детектор размещен в средней части рамы самоходной тележки с возможностью обеспечения контроля пространства между рельсами, включая их внутренние стороны, выходы двух дополнительных детекторов подключены к соответствующим входам микропроцессора, к которому дополнительно подключены соответствующие блоки их управления и блок управления приводом поворота штанги, при этом каждое колесо самоходной тележки выполнено яйцеобразной формы и установлено в опорах с каждой стороны рамы.
Обод колеса выполнен с ребордами.
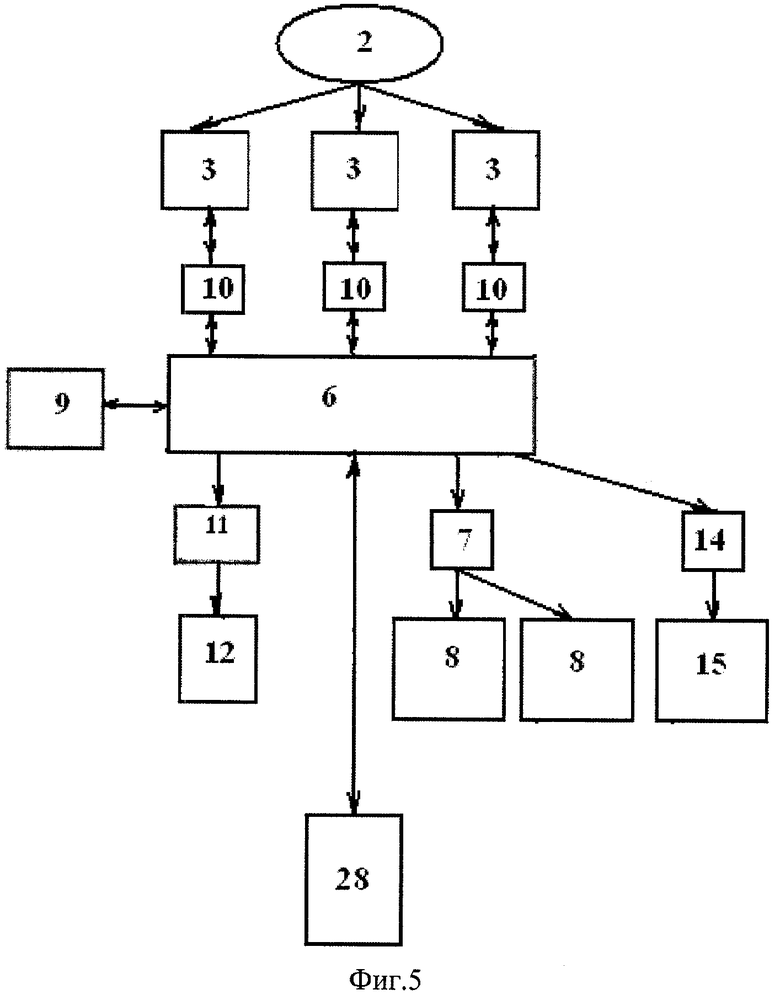
На фиг.1 показан общий вид, вид сбоку; на фиг.2 - то же, вид спереди; на фиг.3 - вид сверху; на фиг.4 - редуктор и на фиг.5 - блок-схема управления.
Устройство для дистанционного обнаружения объектов, скрытых на железнодорожном пути, содержит смонтированные на самоходной тележке 1 источник проникающего излучения 2 и детекторы 3, соединенные посредством кабеля 4 с источником питания 5 и микропроцессором 6. К последнему подключены блок 7 управления приводами перемещения 8 самоходной тележки 1, блок 9 обработки информации и сигнализации и блоки 10 и 11 управления детектором 3 и телекамерой 12.
Устройство состоит из трех детекторов 3 с соответствующими блоками управления 10 и снабжено установленной на раме самоходной тележки 1 штангой 13 с приводом поворота 14 и блоком 15 ее управления. Причем два детектора 3 размещены на свободных концах штанги 13 с возможностью охвата их рабочими зонами соответственно обеих обочин железнодорожного пути, включая наружные стороны рельсов 16. Третий детектор 3 размещен в средней части рамы самоходной тележки 1 с возможностью охвата рабочей зоной внутреннего пространства между рельсами 16, включая их внутренние стороны. Выходы двух дополнительных детекторов 3 подключены к соответствующим входам микропроцессора 6, к которому дополнительно подключены соответствующие блоки 10 их управления и блок 15 управления приводом поворота 14 штанги 13.
Колесо 17 самоходной тележки 1 установлено в опорах 18 с каждой стороны рамы и выполнено яйцеобразной формы с продольной осью вращения 19.
На ободе колеса 17 выполнены реборды 20.
Ось вращения 19 колеса 17 расположена выше уровня головки рельса 16 железнодорожного пути.
Для улучшения проходимости в весенне-осенний период колесо 17 может быть снабжено приспущенной покрышкой. Эти покрышки могут подкачиваться пневматическим насосом по мере прохода тележки 1 в ту или иную стороны.
Обод колеса 17 может быть выполнен в виде металлического цилиндра, на наружной поверхности которого выполнены реборды 20.
Источник питания 5 в виде аккумуляторных батарей размещен на тележке 1 для автономного питания приводов телевизионной камеры 12, приводов 8, 14 и аппаратуры детекторов 3.
Привод поворота 14 штанги 13, состоящей из двух отдельных рукоятей, выполнен в виде редуктора 21 с электродвигателем 22. Редуктор 21 состоит из ведущего колеса 23, жестко закрепленного на валу электродвигателя 22, и двух шестерен 24 и 25, смонтированных на валах 26 и 27, параллельных валу электродвигателя 22. Последние установлены в корпусе редуктора 21 с обеих сторон ведущего колеса 23.
Устройство оснащено пультом управления 28.
Устройство работает следующим образом.
Самоходная тележка 1 заезжает на железнодорожный путь в пространство между рельсами 16. Приводы перемещения 8 обеспечивают как ее продольное, так и поперечное перемещение во все четыре стороны. Для прямолинейного движения тупые и острые концы яйцеобразных колес 17 расположены в разные стороны. Это касается движения «вперед-назад» и «влево-право». В первом случае работают основные колеса 17, а боковые колеса 17 выключены и скользят по поверхности. Во втором случае, наоборот. Колеса 17 яйцеообразной формы с ребордами 20 перекатываются через один рельс 16 на перегоне или через несколько рельсов на станции. Поскольку тележка 1 не имеет поворотного устройства, ее переход через рельсы 16 осуществляется при включении поперечного привода 8. Приводы 8 включаются оператором дистанционно посредством инфракрасного излучения от пульта 28. Затем им же включается привод 14, который разворачивает рукояти штанги 13 и устанавливает их поперек железнодорожного пути под углом 90°. Причем рукояти штанги 13 заранее были расположены в разные стороны вдоль тележки 1. В рабочем положении рукояти представляют вместе с редуктором 21 единое целое.
Они могут быть консольно закреплены на шестернях 24 и 25 или выполнены заодно с ними. Зубчатые венцы на их концах позволяют осуществить ограниченный поворот в горизонтальной плоскости на угол 90°. Шестерни 24 и 25 одновременно вращаются ведущим колесом 23 в разные стороны, одна - по часовой стрелке, другая - против часовой стрелки и, наоборот, при реверсировании электродвигателя 22.
Два детектора 3, размещенных на концах рукоятей, охватывают своими рабочими зонами соответственно обе обочины железнодорожного пути, включая наружные стороны рельсов 16. Третий детектор 3, размещенный в средней части рамы тележки 1, охватывает своей рабочей зоной внутреннее пространство между рельсами 16, включая их внутренние стороны. Это необходимо для исключения помех от рельсов 16. При движении тележки 1 между рельсами 16 детекторы 2 включаются в работу от пульта 28.
Размеры тележки 1 значительно меньше ширины колеи железнодорожного пути, поэтому для охвата боковых зон за рельсами 16 необходимы две раскладываемые рукояти. Их приводами могут служить микроэлектродвигатели, т.к. устройство имеет небольшие размеры и для него требуется небольшая мощность.
Тележка 1 дистанционно перемещается приводом 8 вперед и назад и таким образом производится осмотр железнодорожного пути телекамерой 12 и тремя детекторами 3.
Два основных (передние и задние) колеса 17, смонтированных в опорах 18 на осях 19, одновременно вращаются в одну выбранную работником сторону одним электродвигателем привода 8, у которого на валу имеется две рядом установленные звездочки, соединенные двумя цепями со звездочками на соответствующих осях вращения 19. Перемещение тележки 1 осуществляется по командам с пульта управления 28 через блок 7 управления, подключенный к микропроцессору 6. Конструкция привода 8 для поперечного перемещения тележки 1 аналогична приведенному приводу.
На кривых участках пути необходима коррекция направления движения тележки 1 путем одновременного включения продольного и поперечного приводов 8. Тележка 1, перемещаясь вперед, как бы сползает в ту или иную боковую сторону и остается на продольной оси железнодорожного пути.
Телекамера 12 работает по командам с пульта управления 28 и блока 11 управления и передает через микропроцессор 6 сигналы на дисплей пульта 28 работнику, находящемуся поблизости. Сигналы от источника проникающего излучения 2 через детекторы 3 проходят на железнодорожный путь, с которого поступают в блоки 10 управления и микропроцессор 6 и пульт 28. В случае нахождения посторонних объектов на железнодорожном пути раздается писк и загорается на пульте 28 контрольная лампочка. При этом блоки 10 управления преобразуют сигналы в цифровые коды, передают на входы микропроцессора 6. С выхода микропроцессора 6 сигналы поступают в блок 9 обработки информации и сигнализации, который дистанционно соединен с пультом управления 28. Работник останавливает устройство, телекамера 12 еще раз осматривает данное место.
В случае визуального обнаружения телекамерой 12 скрытых объектов, принимается решение по их удалению или обезвреживанию.
Источник питания 5 может быть размещен на тележке 1. Аппаратура детекторов 3, приводов 8 и 14 подключается через кабель 4, например, к сети переменного тока напряжением 220 В.
Для лучшей проходимости камеры колес 17 могут поочередно спускаться и накачиваться насосами от самостоятельного привода, дистанционно включаемого пультом 28.
Устройство может использоваться как для обнаружения скрытых объектов, так и препятствий на железнодорожном пути.
В зависимости от используемых детекторов 3, например, оснащенных генераторами нейтронных лучей, рентгеновского или ионизирующего излучения, а также синтезаторами частот ЯКР (ядерный квадрапульный резонанс), устройство может обнаруживать взрывчатые и наркотические вещества на железнодорожном пути.
Эффективность устройства для дистанционного обнаружения объектов, скрытых на железнодорожном пути, заключается в надежной работе за счет максимального приближения к ним детекторов и исключения помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ, СКРЫТЫХ В ЗАМКНУТЫХ ОБЪЕМАХ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2010 |
|
RU2422808C1 |
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ ПЕРЕД ДВИЖУЩИМСЯ ПОЕЗДОМ | 2011 |
|
RU2490153C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ И СХОДА С РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2209149C2 |
| Способ и система для обнаружения опасных веществ, находящихся в вагонах грузовых поездов с использованием метода меченых нейтронов | 2018 |
|
RU2690041C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| Автономное устройство для одиночной замены шпал | 2024 |
|
RU2831003C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| Машина на рельсовом ходу для измерения, регистрации и корректировки положения пути | 1986 |
|
SU1505447A3 |



Изобретение относится к устройствам обнаружения посторонних предметов и может быть использовано для контроля чистоты железнодорожного пути на перегонах и станциях. Устройство содержит смонтированные на самоходной тележке источник проникающего излучения и детектор, соединенный посредством кабеля с источником питания и микропроцессором. К микропроцессору подключены блок управления приводами перемещения самоходной тележки, блок обработки информации и сигнализации и блоки управления детектором и телекамерой. Устройство дополнительно содержит два детектора с соответствующими блоками управления и снабжено установленной на раме самоходной тележки штангой с приводом поворота и блоком ее управления. Два детектора размещены на свободных концах штанги с возможностью охвата их рабочими зонами соответственно обеих обочин железнодорожного пути, включая наружные стороны рельсов. Третий детектор размещен в средней части рамы самоходной тележки с возможностью охвата рабочей зоны внутреннего пространства между рельсами, включая их внутренние стороны. Выходы двух дополнительных детекторов подключены к соответствующим входам микропроцессора, к которому дополнительно подключены соответствующие блоки их управления и блок управления приводом поворота штанги. Обеспечивается возможность самоходного устройства перемещаться между рельсами и переезжать рельсы при осмотре железнодорожного пути, повышается эффективность обнаружения скрытых предметов на железнодорожном пути. 1 з.п. ф-лы, 5 ил.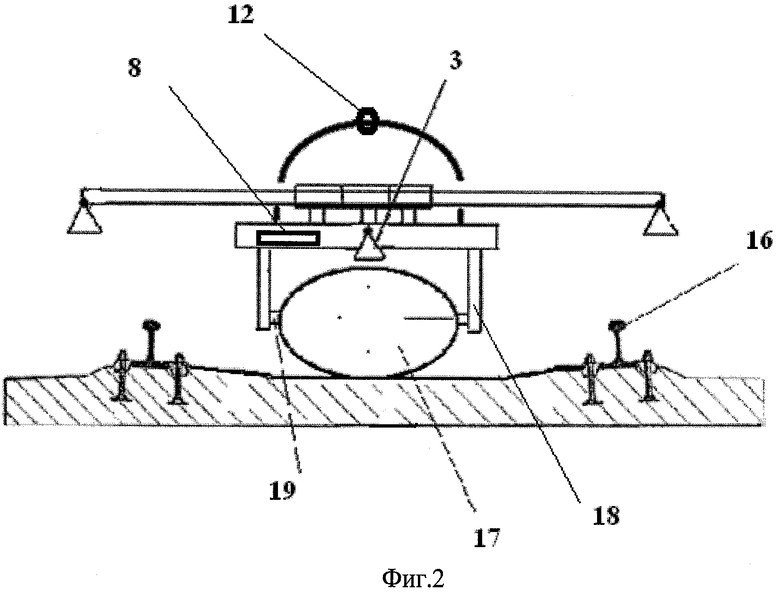
1. Устройство для дистанционного обнаружения объектов, скрытых на железнодорожном пути, содержащее смонтированные на самоходной тележке источник проникающего излучения и детектор, соединенный посредством кабеля с источником питания и микропроцессором с подключенными к нему блоком управления приводами перемещения самоходной тележки, блоком обработки информации и сигнализации и блоками управления детектором и телекамерой, отличающееся тем, что введены два дополнительных детектора с соответствующими блоками управления, а на раме самоходной тележки установлена штанга с приводом поворота и блоком управления, причем два дополнительных детектора размещены на свободных концах штанги, а третий детектор размещен в средней части рамы самоходной тележки с возможностью обеспечения контроля пространства между рельсами, включая их внутренние стороны, выходы двух дополнительных детекторов подключены к соответствующим входам микропроцессора, к которому дополнительно подключены соответствующие блоки их управления и блок управления приводом поворота штанги, при этом каждое колесо самоходной тележки выполнено яйцеобразной формы и установлено в опорах с каждой стороны рамы.
2. Устройство по п.1, отличающееся тем, что обод колеса выполнен с ребордами.
| US 6026135 A, 15.02.2000 | |||
| УСТРОЙСТВО ДЛЯ ПОИСКА СКРЫТЫХ В ГРУНТЕ ОБЪЕКТОВ | 1998 |
|
RU2135932C1 |
| СПОСОБ КОМПЛЕКСНОГО ОБСЛЕДОВАНИЯ ЗЕМЛЯНОГО ПОЛОТНА ЖЕЛЕЗНЫХ ДОРОГ | 2008 |
|
RU2380472C2 |
| Передача к строгальному станку | 1935 |
|
SU49728A1 |

