Изобретение относится к железнодорожному транспорту, а именно к автоматизированным системам, предназначенным для измерения динамических характеристик вагонов и повышения безопасности движения поездов.
Современные технологии и средства обеспечения безопасности движения поездов («Прогрессивные технологии обеспечения безопасности движения поездов и сохранности перевозимых грузов», В.А. Гапанович, И.И. Галиев, Ю.И. Матяш, В.П. Клюква, М, 2008. - 220 с.) создают условия по предупреждению аварийных ситуаций, однако вследствие высокой стоимости систем по предупреждению аварийных ситуаций усматривается дальнейшее их усовершенствование технической и экономической эффективности их использования.
Известно устройство автоматического дистанционного обнаружения рельсовых транспортных средств с отрицательной динамикой в процессе их эксплуатации (RU, №45976, МПК B61K 9/00, 2005), которое содержит блок лазерных маркеров, состоящий из двух установленных на базовом расстоянии лазеров, оптические оси которых направлены встречно и под углом к поверхности объекта, цифровую телекамеру, установленную посредине между лазерами перпендикулярно поверхности объекта, блок запуска с датчиком положения колеса, блок синхронизации, блок подсчета осей и вагонов и программно управляемый блок управления, обработки информации и индикации. Блок запуска соединен по входу с устройством подсчета осей и вагонов, а по выходам - с блоком лазерных маркеров и блоком синхронизации. Первый выход блока синхронизации соединен с телекамерой и вторым входом блока лазерных маркеров, а второй - с устройством подсчета осей и вагонов. Выход устройства подсчета осей и вагонов соединен с первым входом блока обработки, ко второму входу которого подсоединен выход телекамеры. Устройство полностью автоматизировано и позволяет измерять динамические характеристики (величину поперечных перемещений, углы боковых и продольных качаний) кузовов транспортных средств, входящих в состав движущегося поезда, но характеризуется ограниченным количеством измеряемых динамических характеристик.
Известна система контроля поверхности катания колеса железнодорожной колесной пары (RU, №92840, МПК B61K 9/00, 2010), для автоматического контроля технического состояния рельсового подвижного состава в процессе его эксплуатации. Технический результат заключается в повышении надежности эксплуатации системы контроля с сохранением высокой достоверности диагностики поверхности катания колеса движущегося поезда за счет использования датчиков динамических нагрузок, устойчивых к ударным нагрузкам, а также возможность определения дефектного колеса конкретного вагона. Это достигается тем, что датчики динамических нагрузок выполнены в виде волоконно-оптических датчиков давления, размещенных на измерительном участке пути длиной не меньше длины окружности колеса между шпалой и рельсом по разные стороны пути, датчики зоны контроля расположены вдоль рельса в начале и в конце измерительного участка и соединены через блок сопряжения с входом включения блока питания, а также с входами счетчика колесных пар и блока вычисления скорости движения поезда. Датчики температуры установлены по обе стороны пути на глубине уровня подошвы шпалы. Блок сравнения входами подключен к выходам датчиков температур и блока эталонных значений температур, а выход - к входу блока корректировки, выходы которого подключены к входам блока обработки, а другие входы - к выходам преобразователя, входами подключенного к выходным концам волоконно-оптических датчиков, входные концы которых соединены с источником оптического излучения. Блок вычисления динамического коэффициента, выходом подключенный ко второму информационному входу блока принятия решений. Блок выделения динамической составляющей усилий и блок выделения статической составляющей усилий, включенные между выходом блока обработки и входами блока вычисления динамического коэффициента. При этом выходы счетчика колесных пар и блока идентификации вагонов подключены к третьему и четвертому информационным входам блока принятия решений, соответствующие входы/выходы которого соединены с выходами/входами блока хранения информации, а другие выходы - соответственно с блоком индикации, блоком корректировки и посредством канала связи с персональным компьютером автоматизированного рабочего места работника диспетчерского центра.
Однако в данном случае ограничено количество измеряемых динамических характеристик, а волоконно-измерительные датчики быстро выходят из строя, что снижает надежность системы.
Известна (RU, №2392149, МПК B61K 9/00, 2010) система предупреждения аварии состава, содержащая размещенные около железнодорожных путей пункты считывания информации, соединенные через линию связи с ЭВМ оператора системы автоматической идентификации и формирования модели состава, которая соединена через линию связи с ЭВМ диспетчера станции. На подвижных единицах размещены электронные кодовые датчики с идентификационными номерами и электронные кодовые датчики буксовых узлов с индивидуальными идентификационными номерами, и блоки измерительных физических характеристик буксовых узлов, выходы которых соединены с управляющими входами электронных кодовых датчиков буксовых узлов. На локомотиве размещена система автоведения состава, включающая в себя ЭВМ с визуализатором обстановки и устройством служебного торможения, блок сравнения идентификационных номеров, запоминающее устройство идентификационной модели состава и сигнализатор аварийной ситуации, радиомодем, который через радиоканал связан с радиомодемом на станции, соединенным с выходом ЭВМ диспетчера станции, снабженной запоминающим устройством для хранения идентификационных моделей и устройством записи-считывания. Буксовые узлы подвижных единиц и локомотива снабжены первыми и вторыми модулями приемопередатчиков, порты которых соединены между собой и с выходом блока датчиков физических характеристик буксовых узлов. Вторые модули приемопередатчиков на каждой подвижной единице и локомотиве локальной сетью маломощной радиосвязи связаны с датчиками физических характеристик, размещенными вне буксовых узлов. Первые модули приемопередатчиков связаны через локальные сети и маломощной радиосвязи соответственно левой и правой сторонами поезда. Основные и резервные модули приемопередатчиков на локомотиве соединены через CAN интерфейс с системой автоведения состава и с каждым из двух дублированных центральных модулей обработки информации комплексного локомотивного устройства безопасности, выход которого соединен с устройством экстренного торможения.
Технический результат заключается в расширении функциональных возможностей системы, направленных на повышение безопасности движения поездов, однако система экономически затратна, т.к. предусматривает установку датчиков на каждую единицу подвижного состава, а также наличие ЭВМ в каждом составе и может быть рекомендована к применению только в спецсоставах.
Известно большое количество зарубежных изобретений, в основном они направлены на измерение единичных характеристик, поэтому не представляют интереса. Например: «Устройство и способ для обнаружения дефектов в работе колес и железнодорожных путей» (СА, №2163626, 18.07.2006); «Способ контроля динамических характеристик железнодорожного вагона» (ЕР, №2293039, 09.03.2011), предусматривается измерение одной величины, представляющей динамическую характеристику железнодорожного вагона, с учетом рельсового пути, обработку этой величины, составление соответствующей диаграммы и сравнение ее значений с контрольной диаграммой.
Известна автоматизированная система контроля ходовых частей вагонов (RU, №2450948, МПК B61K 9/00, 9/12, 2010 - взято за ближайший аналог), реализующая выявление вагонов с отрицательной динамикой с использованием тензометрических датчиков и измерением угла перекоса осей вагонов, которая содержит блок синхронизации, выполненный с возможностью подсчета количества осей в проходящем составе, распознавания типов подвижных единиц в составе и формирования синхронизирующих сигналов, необходимых для работы системы, блок выявления вагонов с обезгруженными колесными парами, связанный с тензометрическими датчиками и предназначенный для выявления в составе вагонов с отрицательной динамикой, и блок определения угла перекоса колесных пар, содержащий индуктивные датчики и выполненный с возможностью обнаружения колесных пар с превышением порогового значения угла набегания колеса на рельс. Система снабжена напольным, станционным и перегонным оборудованием и динамично дополняет устройство по п.м. №45976, несколько повышается точность и достоверность контроля отказов основных узлов подвижного состава в процессе его движения и выявление вагонов, склонных к сходу.
Но недостатком вышеописанного решения является невозможность обеспечения точности и достоверности контроля конкретных неисправных узлов в динамике в процессе эксплуатации подвижного состава из-за применения тензометрических датчиков, значительно реагирующих на изменение окружающей среды (суточное изменение температуры, солнечный нагрев и т.д.), низкая точность результатов измерений углов разворота осей колесных пар, а также ограниченность функциональных возможностей системы.
Техническим результатом, на достижение которого направлено заявляемое решение, является повышение точности и достоверности полученных показателей от датчиков, а также расширение функциональных возможностей контроля отказов основных узлов подвижного состава в процессе его движения, направленных на повышение безопасности движения.
Указанный технический результат достигается тем, что автоматизированная система измерения динамических характеристик и выявления вагонов с отрицательной динамикой (далее система) содержит блок синхронизации, выполненный с возможностью в проходящем составе формирования синхронизирующих сигналов, необходимых для работы системы, блок выявления вагонов с обезгруженными колесными парами, предназначенный для выявления в составе вагонов с отрицательной динамикой, и блок определения угла перекоса колесных пар, содержащий индуктивные датчики и выполненный с возможностью обнаружения колесных пар с повышением порогового значения угла набегания колеса на рельс, причем оборудование системы выполнено в виде напольного, станционного и перегонного, согласно изобретению предлагается:
- блок выявления вагонов с обезгруженными колесными парами связан с инерционной навигационной системой, выполненной в виде датчиков, каждый из которых состоит из 3-х осевого акселерометра и гироскопа, конструктивно объединенных с индуктивным датчиком, а также наличием блока лазерных маркеров, состоящих из 2-х лазерных модулей и видеокамер, контроллера предварительной обработки результатов измерений и многоканального цифрового блока регистрации контролируемых данных;
- датчики расположены на обоих рельсах симметрично оси пути и установлены друг от друга на одинаковом расстоянии на двух участках контроля, при этом на первом участке длиной, равной длине окружности обода колеса, датчики установлены друг от друга на расстоянии, равном шагу шпальной решетки, на втором участке длиной, равной от 2-х до 3-х длин окружности обода колеса, датчики установлены с шагом, равным шагу двухшпальных промежутков;
- блоки обработки и хранения данных по системе передачи перенесены в состав станционного оборудования.
Таким образом, система включает в себя напольное оборудование - блок лазерных маркеров и комплект комбинированных трехкомпонентных датчиков, которые устойчивы к изменениям окружающей среды по сравнению с тензометрическими датчиками, что значительно повышает качество измеренных показателей; накопление измерений акселерометров и гироскопов при проходе колеса над датчиком позволяет регистрировать развитие процесса взаимодействия колесо-рельс во времени на участке рельса вблизи датчика, поскольку каждый трехосевой акселерометр и гироскоп образуют инерционную навигационную систему, что позволяет для любого момента времени при проходе поезда вычислить положение и ориентацию участка рельса вблизи датчика, обработка информации о положении и ориентации участка рельса дает возможность оценить с высокой точностью направление и степень воздействия системы друг на друга «колесо - рельс», предупредить о потенциальной возможности набегания колеса; система содержит блок лазерных маркеров, измеряющий с помощью видеокамеры и лазеров положение борта вагона и выделение кадра с бортовым номером; комплект трехкомпонентных комбинированных датчиков, расположенных друг напротив друга на каждом рельсе, включающих в себя индуктивный датчик, регистрирующий проход колеса вагона, акселерометр, измеряющий уровень воздействия колеса в трехмерном пространстве, и гироскоп, определяющий величину смещения рельса, многоканальный цифровой регистратор данных, полученных от датчиков и видеокамер, соединенных линиями связи, оснащенными защитой от мощных электрических разрядов, и имеющих оптоэлектронную развязку, синхронизированных. По сигналам датчиков первого участка контроля оценивается состояние поверхности катания колеса (выбоины, ползуны), по сигналам датчиков второго участка контроля оценивается поведение тележки в рельсовой колее (изменение угла набегания колеса на рельс во времени, обнаружение "шальных" тележек) и взаимодействие колесо-рельс, вызванные извилистым движением колесной пары. Для оценки поведения тележки в рельсовой колее используются также датчики первого участка; контроллером предварительной обработки результатов измерений и формирования управляющих сигналов, необходимых для работы системы, производится подсчет количества осей в проходящем составе, предварительное распознавание типов подвижных единиц. После прохода поезда каждым из блоков обработки производится анализ зарегистрированных данных, а многоканальным цифровым блоком регистрации создает возможность их хранения, в результате которого оценивается в сравнении с эталоном степень отклонения измеренного параметра или наличие дефектов. Таким образом, производится выявление вагонов с дефектами кузова, на поверхности катания колесных пар, наличия превышения угла перекоса колесных пар, с обезгруженными колесными парами в тележках и выявление вагонов, склонных к сходу (отрицательную динамику). Для повышения надежности оборудования комплекса, блоком диагностики производится постоянное тестирование оборудования и при необходимости сообщается на сервер комплекса. Результаты измерения динамических характеристик записываются и производится оценка состояния каждого проследовавшего вагона, его бортовой номер, дата и время произведенных измерений, файл с видеозаписью о прохождении поезда. Вся информация записывается в базу данных сервера.
Блоки обработки и хранения данных по системе передачи перенесены в состав станционного оборудования.
Перенос части перегонного оборудования в станционное (автоматизированное рабочее место оператора или инженера, установленное в пунктах технического осмотра вагонов или в депо ремонта) позволяет обеспечить надежность работы оборудования, а также его сохранность, а также обеспечить оперативность ремонтных работ.
Сущность изобретения поясняется схемой (см. фиг. 1). Система состоит из следующих комплектующих, связанных между собой (см. фиг. 1): контроллера предварительной обработки результатов измерений (1); многоканального блока регистрации данных комбинированных датчиков (2); трехкомпонентных датчиков (3); блок лазерных маркеров контроля положения кузова вагона (4); блока синхронизации (5); блока определения типа вагона и скорости движения (6); анализатора перекоса осей (7); анализатора наличия дефектов на поверхности катания колес (8); анализатора состояния вагонной тележки (9); детектора перекоса кузова вагонов (10); детектора обнаружения колебаний виляния кузова вагона (11); детектора обнаружения колебаний - боковая качка (12); детектора обнаружения деформации кузова выше установленной нормы (13); блока регистрации номера вагона (14); блока видеорегистрации прохода поезда (15); блока диагностики оборудования (16); сервера комплекса измерения динамических характеристик вагонов (17);базы результатов измерений (18); архива результатов измерений (19); блока гарантированного питания (20); АРМ отображения результатов измерений (21).
Система работает следующим образом.
При заходе поезда на участок контроля при срабатывании первых индуктивных датчиков (3) производится запуск контроллера первичной обработки (1), который фиксирует время захода поезда и выдает команды блоку лазерных маркеров (4) на включение прожектора подсветки бортов вагона, включение лазерных модулей, видеокамер регистрации бортовых номеров вагонов и регистрации положения бортов. По известному расстоянию между индуктивными датчиками контроллер (1) определяет скорость каждого вагона и запускает в режим записи многоканальный цифровой регистратор данных (2), выполненный на базе ЭВМ под управлением операционной системы Linux. Вся информация, полученная от напольного оборудования, включающая в себя результаты измерений всех датчиков, каждого кадра видеокамер, записывается с метками времени, выдаваемыми блоком синхронизации (5). Соединительные линии между датчиками, видеокамерами и многоканальным регистратором оснащены защитой от мощных электрических разрядов и имеют оптоэлектронную развязку. После прохода поезда по команде контроллера блоком определения типа вагона (6), в зависимости от предварительных данных, полученных от контроллера, скорости движения, производится выбор алгоритма дальнейшей обработки результатов измерений в зависимости от типа вагона. Анализатором перекоса осей вагона (7) по разнице времени прохода правого и левого колеса одной оси над индуктивными датчиками, совокупности показаний: разницы времени прохода колеса и скорости движения строится график поведения каждой оси во времени. Оси вагонов, имеющие углы разворота выше установленных значений, а также тележки вагонов, имеющие в своем составе две оси с углами разворота свыше нормы, бракуются блоком анализа (9). Анализатор дефектов на поверхности катания колес (8) по показаниям комбинированных датчиков (3) оценивает величину взаимодействия колеса и рельса в вертикальной и горизонтальной плоскостях, наличие дефектов на поверхности катания в виде раковин, сколов, выщербин и ползунов. Комбинированные датчики, представляющие собой инерционную навигационную систему, устанавливаются таким образом, чтобы колесо производило не менее трех оборотов на участке контроля. По совокупности данных от анализаторов перекоса осей и дефектов на поверхности катания колес, а также информации о воздействии гребня колеса на рельс в поперечном направлении, обнаружение колебаний борта вагона - виляния блоком (11) или боковой качки (12), производится оценка степени опасности схода вагона. При этом определяется наличие перекоса кузова блоком (10), деформации борта блоком (13). После прохода поезда обработанные результаты измерений и оценка состояния каждого вагона, включающая в себя дату, время и скорость прохода поезда, количество вагонов в составе, фотография бортового номера зарегистрированная блоком (14), и видеосъемка в период прохождения состава блоком видеорегистрации (15) записываются в базу результатов (18) сервера (17), после чего становятся доступными для АРМ оператора (21) пункта технического осмотра вагонов и ремонтных депо, а также удаленного мониторинга и контроля состояния оборудования по сети СПД РЖД. Питание комплекта оборудования производится блоком гарантированного питания (20), обеспечивающим стабильное электроснабжение в случаях отключения питающего напряжения до 30 минут. Для повышения надежности оборудования комплекса, блоком диагностики (16) производится постоянное тестирование оборудования и в случае ошибок или по запросу по каналу связи оператору передается информация о сбоях в работе оборудования с указанием причины и конкретного блока, в котором произошел сбой.
Таим образом, изобретение относится к железнодорожному транспорту, в частности к автоматизированным системам, измерения динамических характеристик и контроля исправности ходовых частей вагонов, предназначенным для повышения безопасности движения поездов за счет своевременного обнаружения отказов основных узлов подвижного состава в пути следования и последующего устранения неисправностей подвижного состава при остановке поезда на ПТО.
Высокая производительность контроля и возможность его проведения непосредственно в процессе эксплуатации вагонов с целью выявления и своевременного обнаружения отказов основных узлов подвижного состава в пути следования и последующего устранения неисправностей при остановке поезда на ПТО позволяет существенно повысить безопасность движения на предприятиях РЖД.
Использование заявленного изобретения является усовершенствованием Системы автоматического обнаружения отрицательной динамики АСООД, разработанной ЗАО АКБ «Кордон» г. Новосибирска на основании технического решения (п.м. №45976), позволяет получить технический результат, заключающийся в повышении надежности качественных характеристик: повышение достоверности результатов, их надежности, а также увеличение числа определяемых параметров динамики вагонов. Изготовление заявленной системы производится по известным технологиям, из известных материалов и комплектующих по новым компоновочным схемам с применением наиболее прогрессивных комплектующих. Опытный образец прошел проверку на предприятии Западно-Сибирской железной дороги и получил положительное заключение. Таким образом, подтверждается «промышленная применимость» вышезаявленного технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ | 2010 |
|
RU2450948C1 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ С АВТОМАТИЗИРОВАННЫМ РАБОЧИМ МЕСТОМ ОСМОТРЩИКА ВАГОНОВ ПРИ ВСТРЕЧЕ ПОЕЗДА "СХОДУ" | 2010 |
|
RU2450947C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| СИСТЕМА КОМПЛЕКСНОГО ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ПОЕЗДОВ | 2010 |
|
RU2428341C1 |
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| Система для оценки технического состояния железнодорожного подвижного состава | 2024 |
|
RU2821813C1 |
| Способ обнаружения вагонов с отрицательной динамикой | 2023 |
|
RU2806916C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ПЕРЕКОСА КОЛЕСНЫХ ПАР ТЕЛЕЖЕК ГРУЗОВЫХ ВАГОНОВ | 2006 |
|
RU2323844C1 |

Изобретение относится к автоматизированным системам, предназначенным для измерения динамических характеристик вагонов. Автоматизированная система измерения динамических характеристик и выявления вагонов с отрицательной динамикой содержит блок лазерных маркеров, измеряющий с помощью видеокамеры и лазеров положение борта вагона и выделение кадра с бортовым номером, комплект трех компонентных комбинированных датчиков, расположенных попарно друг напротив друга на каждом рельсе, включающих в себя индуктивный датчик, регистрирующий проход колеса вагона, акселерометр, измеряющий уровень воздействия колеса в трехмерном пространстве, и гироскоп, определяющий величину смещения рельса. Автоматизированная система содержит также многоканальный цифровой регистратор данных, полученных от датчиков и видеокамер, соединенных линиями связи, оснащенными защитой от мощных электрических разрядов, и имеющих оптоэлектронную развязку, синхронизированных контроллером предварительной обработки результатов измерений и формирования управляющих сигналов, необходимых для работы системы. Контроллером производится подсчет количества осей в проходящем составе и предварительное распознавание типов подвижных единиц. В результате расширяются функциональные возможности системы, повышается безопасность движения поездов. 2 з.п. ф-лы, 1 ил.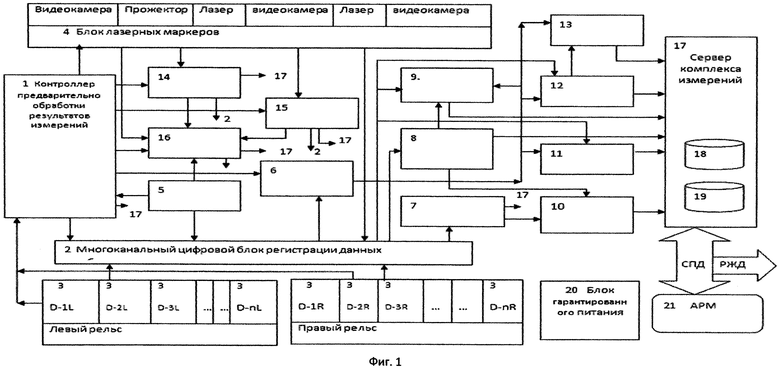
1. Автоматизированная система измерения динамических характеристик и выявления вагонов с отрицательной динамикой содержит блок синхронизации, выполненный с возможностью в проходящем составе формирования синхронизирующих сигналов, необходимых для работы системы, блок выявления вагонов с обезгруженными колесными парами и предназначенный для выявления в составе вагонов с отрицательной динамикой, и блок определения угла перекоса колесных пар, содержащий индуктивные датчики и выполненный с возможностью обнаружения колесных пар с повышением порогового значения угла набегания колеса на рельс, причем оборудование системы выполнено в виде напольного, станционного и перегонного, отличающаяся тем, что блок выявления вагонов с обезгруженными колесными парами связан с инерционной новигационной системой, выполненной в виде датчиков, каждый из которых состоит из трехосевого акселерометра и гироскопа, конструктивно объединенных с индуктивным датчиком, а также наличием блока лазерных маркеров, состоящих из двухлазерных модулей и видеокамер, контроллера предварительной обработки результатов измерений и многоканального цифрового блока регистрации контролируемых данных.
2. Система по п.1, отличающаяся тем, что датчики расположены на обоих рельсах симметрично оси пути и установлены друг от друга на одинаковом расстоянии на двух участках контроля, при этом на первом участке длиной, равной длине окружности обода колеса, датчики установлены друг от друга на расстоянии, равном шагу шпальной решетки, на втором участке длиной, равной от 2-х до 3-х длин окружности обода колеса, датчики установлены с шагом, равным шагу двухшпальных решеток.
3. Система по п.1, отличающаяся тем, что блоки обработки и хранения данных по системе передачи перенесены в состав станционного оборудования.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ | 2010 |
|
RU2450948C1 |
| Машина для земляных работ | 1941 |
|
SU63558A1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДИНАМИКИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2273013C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 2005 |
|
RU2293039C2 |

