Область техники, к которой относится изобретение
Настоящее изобретение относится к способам анализа нефтепромысловой колонны, когда она вводится в нефтяную скважину или извлекается из нефтяной скважины. Конкретнее, изобретение относится к способу анализа секций колонны при практически постоянной заранее установленной скорости и отображения результатов анализа, полученных при требуемых скоростных условиях.
Уровень техники
После бурения скважины через подземную формацию и выявления того, что эта формация может дать экономически достаточное количество нефти или газа, бригада завершает скважину. Во время бурения, завершения и текущего ремонта персонал регулярно вводит и (или) извлекает такие устройства, как колонна, трубы, магистрали, штанги, полые цилиндры, обсадные трубы, патрубки, муфты и каналы в скважину. Например, обслуживающая бригада может использовать ремонтный или обслуживающий агрегат для извлечения насосно-компрессорной колонны и насосных штанг из скважины, которая добывает нефть. Бригада может проверять извлеченную колонну и оценивать, следует ли заменить одну или несколько секций этой колонны вследствие физического износа, утоньшения стенок колонны, химического воздействия, выкрашивания или иного дефекта. Бригада обычно заменяет секции, которые проявляют неприемлемый уровень износа, и отмечает другие секции, которые начинают проявлять износ и могут потребовать замены при последующей заявке на техническое обслуживание.
В качестве альтернативы ручной проверке колонны обслуживающая бригада может развернуть инструмент для оценивания колонны, когда колонну извлекают из скважины и (или) вводят в скважину. Инструмент, как правило, остается постоянно на устье скважины, и ремонтный агрегат перемещает колонну через измерительную зону инструмента.
Этот инструмент обычно измеряет выкрашивание и толщину стенок и может определить трещины в стенке колонны. Для оценки этих параметров износа колонну можно обследовать радиацией, напряженностью поля (электрического, электромагнитного или магнитного) и(или) перепадом давлений. Инструмент обычно производит отсчеты исходного аналогового сигнала и выдает дискретизированную или цифровую версию этого аналогового сигнала.
Иными словами, инструмент, как правило, возбуждает секцию колонны с помощью поля, радиации или давления и детектирует взаимодействие колонны с этим возбудителем или отклик на этот возбудитель. Такой элемент, как измерительный преобразователь, преобразует этот отклик в аналоговый электрический сигнал. Например, инструмент может создавать магнитное поле, в которое помещается колонна, и измерительный преобразователь может обнаруживать изменения или возмущения в поле, появляющиеся из-за наличия колонны и любых аномалий этой колонны.
В то время как инструмент может предоставлять важную и подробную информацию о повреждении или износе в колонне, этими данными можно манипулировать несколькими путями, которые ограничивают его применимость. Например, скорость введения или извлечения колонны может сильно влиять на данные, получаемые инструментом. К примеру, если одна и та же секция колонны вытягивается через инструмент на двух сильно различающихся скоростях, данные износа не будут совпадать, что оставляет открытой возможность неверного определения остающегося срока службы для этой секции колонны.
Помимо того, сортировку секций колонны обычно совершает оператор, просматривающий данные, полученные инструментом. Общая сумма этих данных может включать в себя данные, полученные на нескольких различных скоростях, не давая тем самым оператору возможности обеспечить точную сортировку для колонны. Далее, поскольку традиционный способ сортировки колонны требует оператора, чтобы анализировать данные, разные операторы обычно сортируют одни и те же данные различным образом, тем самым получая несовместимые сортировки по множеству испытательных стендов для колонн.
Чтобы можно было направить усилия на эти недостатки уровня техники, нужно иметь улучшенную способность оценивать колонну. Например, существует необходимость в способе поддержания постоянной скорости удаления секции колонны во время анализа, чтобы гарантировать непротиворечивые данные анализа. Существует другая необходимость в способе установки скорости удаления или введения секции колонны на основе типа колонны и датчиков, используемых для обеспечения наиболее точного анализа секций колонны. Существует еще необходимость в способе проведения разбора данных анализа и отображения только тех данных, которые были получены в пределах диапазона оптимальных скоростей. Способность, направленная на одну или несколько из этих нужд, обеспечивала бы более правильные, точные, воспроизводимые, эффективные или прибыльные оценки колонн.
Сущность изобретения
Настоящее изобретение относится к оцениванию такого изделия, как кусок трубы или стержня, в связи с помещением этого изделия в нефтяную скважину или удаления этого изделия из нефтяной скважины. Оценивание изделия может содержать восприятие, сканирование, слежение, наблюдение, определение ущерба или выявление параметра, характеристики или свойства этого изделия.
В одном объекте настоящего изобретения инструмент, сканер или датчик могут контролировать колонну, трубы, магистрали, штанги, полые цилиндры, обсадные трубы, патрубки, муфты или каналы рядом с устьем нефтяной скважины. Инструмент может содержать датчик, например, толщины стенки, износа штанги, расположения муфты, трещин, изображений или выкрашивания. Когда полевая обслуживающая бригада извлекает колонну из нефтяной скважины или вводит колонну в скважину, инструмент может оценивать колонну на наличие дефектов, целостности, износа, на пригодность к продолжению службы или аномальные условия. Инструмент может предоставлять информацию о колонне в цифровом формате, например как цифровые данные, одно или несколько чисел, отсчетов или моментальных снимков. Колонна может перемещаться при постоянной скорости, заранее установленной на основе этого инструмента и типа колонны. За счет удаления колонны с постоянной известной скоростью инструмент может обеспечивать более непротиворечивый вид износа этой колонны.
В другом примерном варианте осуществления заранее установленная скорость может быть введена в компьютер, и может вычисляться расстояние, необходимое нефтяной ремонтной установке для разгона до постоянной скорости. Секцию колонны можно опустить ниже инструмента на расстояние, равное расстоянию разгона, чтобы колонна двигалась с заранее установленной скоростью в то время, когда она проходит инструмент. Это позволит проанализировать весь сегмент колонны на заранее установленной скорости. Когда сегмент полностью пройдет инструмент, установку можно замедлить до остановки и удалить сегмент и процесс можно повторить со следующим сегментом колонны.
В другом примерном варианте осуществления компьютер может извлекать данные анализа из инструмента и данных скорости удаления колонны из кодера на нефтяной ремонтной установке. Компьютер может определять, какие данные были получены при заранее установленной скорости и требованиях согласованности и отличать эти данные от данных, полученных вне допустимых параметров. Компьютер может затем отображать данные, полученные в пределах параметров, так что секцию колонны можно сортировать. Компьютер может завершать сортировку секций колонны, либо этот этап может завершать оператор-специалист. Если данные анализа близки к порогу двух разных градаций, можно определить, следует ли анализировать эту секцию колонны еще раз.
В другом примерном варианте осуществления данные анализа для множества секций колонны можно извлекать и сравнивать для химической обработки, применяемой к скважине, из которой выходят секции колонны. Если секции колонны показывают чрезмерный износ по сравнению с их сроком службы, режим химической обработки можно видоизменить на основе данных анализа секций колонны из этой скважины. Помимо того, скважины, которые размещены аналогично анализируемой скважине, могут иметь собственные режимы химической обработки, видоизмененные на основе данных анализа единственной скважины.
В другом примерном варианте осуществления кодер может размещаться на подъемном барабане нефтяной ремонтной установки. Данные от этого кодера можно использовать для нахождения линейной глубины или длины для каждой секции колонны. Данные глубины можно связать с данными анализа и данными скорости. Компьютер может обеспечить отображение диаграммы, показывающей данные анализа в зависимости от глубины секции колонны, из которой получены эти данные анализа, чтобы определить, отличается ли износ по глубине скважины.
Обсуждение данных обработки колонны в данном разделе предназначено только для иллюстративных целей. Различные объекты настоящего изобретения можно яснее понять и оценить из рассмотрения нижеследующего подробного описания раскрытых вариантов осуществления и со ссылкой на сопровождающие чертежи и формулу изобретения, которая может последовать. Кроме того, иные объекты, системы, способы, признаки, преимущества и цели настоящего изобретения станут яснее для специалиста при рассмотрении нижеследующих чертежей и подробного описания. Оно направлено на то, что все такие объекты, системы, способы, признаки, преимущества и цели должны быть включены в данное описание, должны быть включены в объем настоящего изобретения и должны охраняться сопровождающей формулой изобретения.
Краткое описание чертежей
Фиг.1 представляет собой иллюстрацию типовой системы для обслуживания нефтяной скважины, которая сканирует колонну, когда эта колонна извлекается из скважины или вводится в скважину в соответствии с вариантом осуществления настоящего изобретения.
Фиг.2 представляет собой функциональную блок-схему типовой системы для сканирования колонны, которую вводят в нефтяную скважину или извлекают из нефтяной скважины в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.3 представляет собой блок-схему алгоритма типового процесса получения информации о колонне, которую вводят в нефтяную скважину или извлекают из нефтяной скважины в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.4 представляет собой блок-схему алгоритма типового процесса анализа сегмента колонны для определения градации колонны в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.5 представляет собой блок-схему алгоритма другого типового процесса анализа сегмента колонны для определения градации колонны в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.6 представляет собой блок-схему алгоритма другого типового процесса получения информации о колонне, которую вводят в нефтяную скважину или извлекают из нефтяной скважины в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.7 представляет собой блок-схему алгоритма другого типового процесса получения информации о колонне, которую вводят в нефтяную скважину или извлекают из нефтяной скважины в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.8 представляет собой блок-схему алгоритма типового процесса определения химической обработки для скважины на основе данных анализа секций колонны из этой скважины в соответствии с одним примерным вариантом осуществления настоящего изобретения.
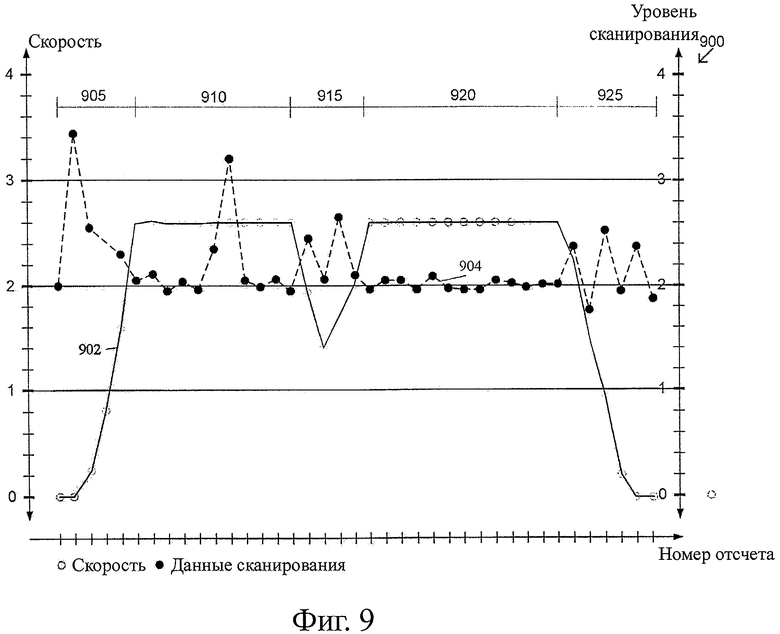
Фиг.9 представляет собой примерную диаграмму сравнения скорости секции колонны и данных анализа от этой секции колонны в соответствии с примерным вариантом осуществления настоящего изобретения.
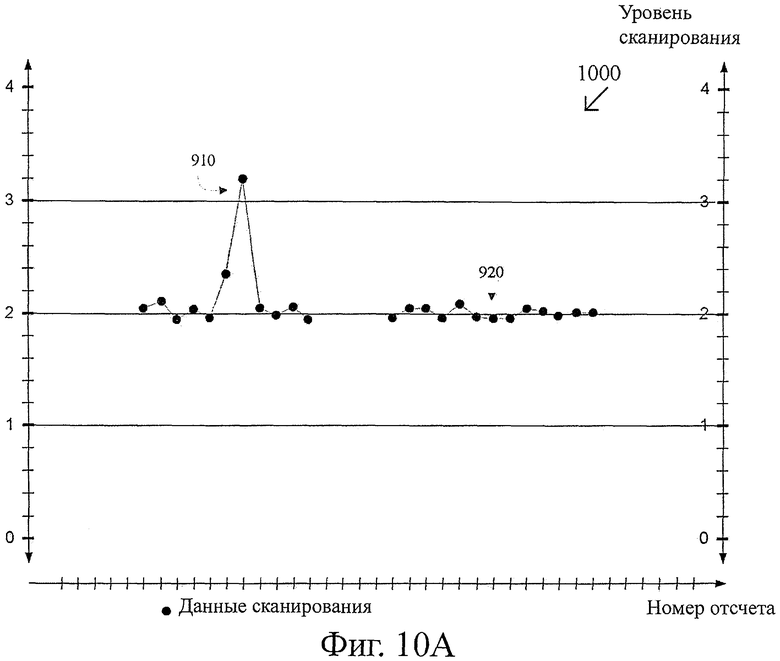
Фиг.10А представляет собой примерную диаграмму, отображающую данные анализа от секции колонны после удаления данных, полученных, когда скорость секции колонны находилась вне диапазона, в соответствии с одним примерным вариантом осуществления настоящего изобретения.
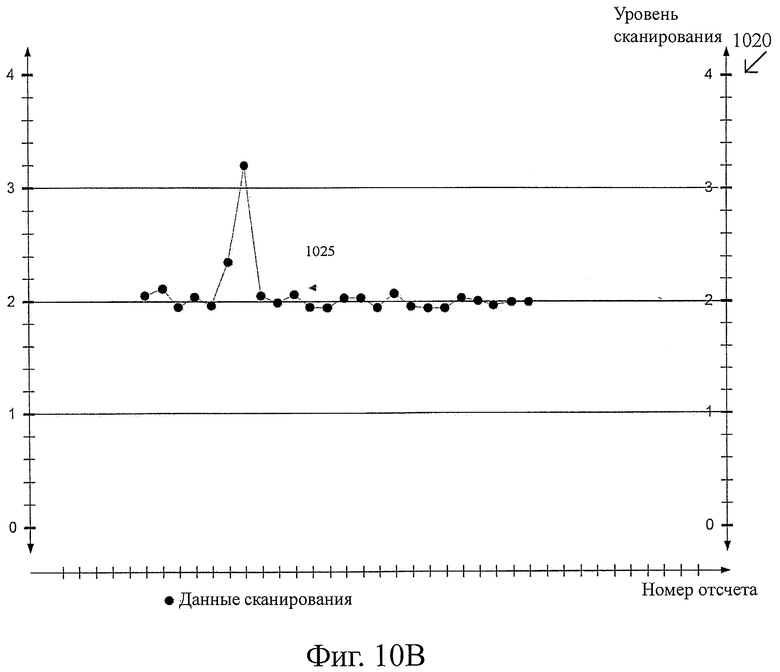
Фиг.10В представляет собой примерную диаграмму, отображающую данные анализа, объединенные в единую цепочку данных, в соответствии с одним примерным вариантом осуществления настоящего изобретения.
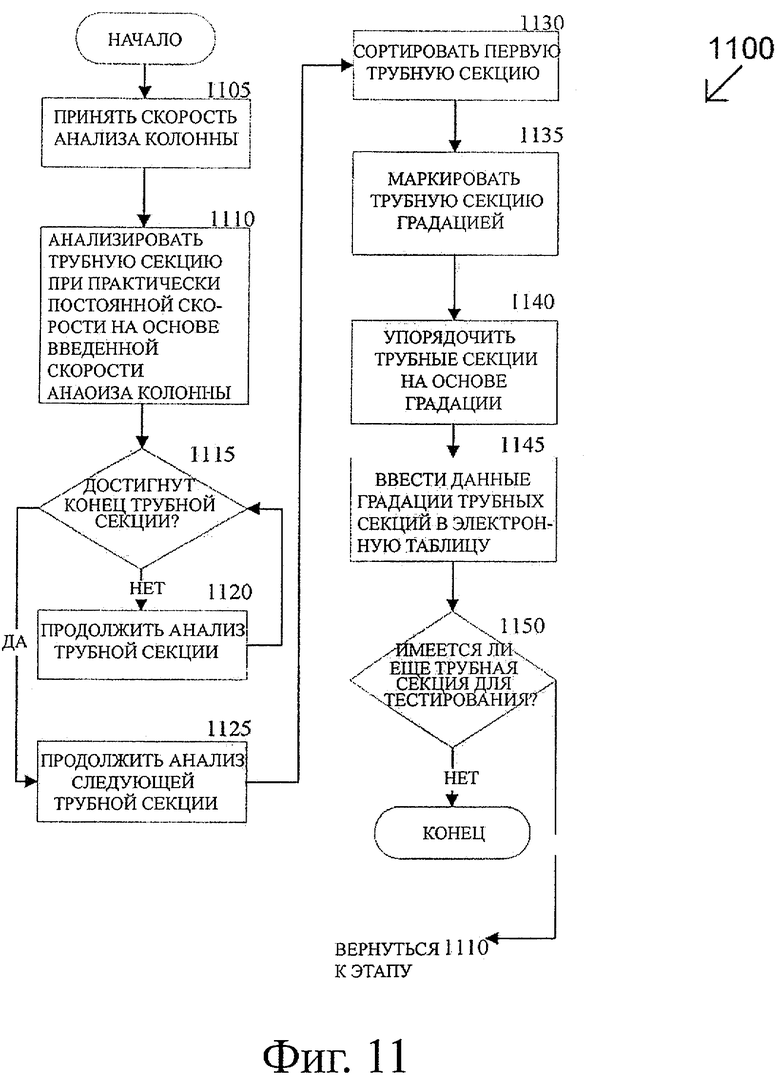
Фиг.11 представляет собой блок-схему алгоритма другого типового процесса получения информации о колонне, которую вводят в нефтяную скважину или извлекают из нефтяной скважины, в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.12 представляет собой блок-схему алгоритма другого типового процесса получения информации о колонне, которую вводят в нефтяную скважину или извлекают из нефтяной скважины, в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Фиг.13 представляет собой блок-схему алгоритма типового процесса определения того, получен ли минимальный уровень точки полезных данных в анализе секции колонны, в соответствии с одним примерным вариантом осуществления настоящего изобретения.
Многие аспекты изобретения могут быть лучше поняты со ссылкой на вышеуказанные чертежи. Компоненты на чертежах не обязательно изображены в масштабе. Вместо этого упор сделан на ясное иллюстрирование принципов типовых вариантов осуществления настоящего изобретения. Кроме того, на чертежах ссылочные позиции обозначают сходные или соответствующие, но не обязательно идентичные элементы по нескольким видам.
Подробное описание примерных вариантов осуществления
Настоящее изобретение раскрывает способы анализа секций колонны из нефтяной скважины и отображения данных анализа для усовершенствования процесса сортировки труб. Обеспечение согласованных надежных данных анализа и отображение их единообразным и легким для понимания образом будут помогать тому, что нефтепромысловая обслуживающая бригада сможет выполнять более эффективные, точные и основательные оценки того, какой срок службы, если он имеется, остается для каждого звена колонны в секции колонны.
Способ и система для обработки данных колонны будут теперь описаны полнее со ссылкой на фиг.1-13, которые показывают характерные варианты осуществления настоящего изобретения. Фиг.1 показывает установку для ремонта скважин, перемещающую колонну через сканер колонны в характерной рабочей среде для варианта осуществления настоящего изобретения. Фиг.2 предоставляет блок-схему сканера колонны, который отслеживает, воспринимает или характеризует колонну и гибко обрабатывает получаемые данные колонны. Фиг.3-13 показывают, вместе с иллюстративными данными и графиками, блок-схемы алгоритмов для способов, связанных с получением данных колонны и обработкой полученных данных.
Изобретение может быть воплощено во многих различных формах и его не следует толковать как ограниченное изложенными здесь вариантами осуществления; наоборот, эти варианты осуществления представлены, чтобы данное раскрытие было полным и завершенным, и будут полностью представлять объем изобретения специалистам. Далее все данные здесь «примеры» или «примерные варианты осуществления» предназначены быть не ограничивающими, а поддерживаемыми, среди прочего, представлениями настоящего изобретения.
Кроме того, хотя примерный вариант осуществления изобретения описан в отношении восприятия или контроля трубы, колонны или трубки, перемещающейся через измерительную зону рядом с устьем скважины, специалисты поймут, что изобретение можно применять или использовать в связи со множеством приложений в нефтепромысловых или иных рабочих средах.
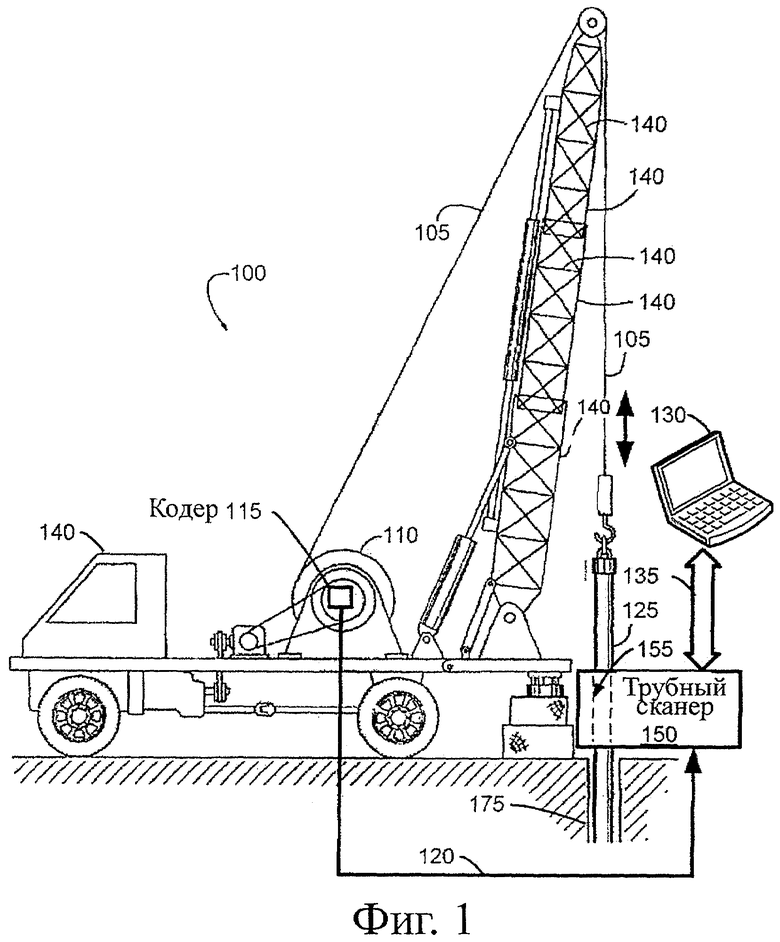
Обратимся к фиг.1, где иллюстрируется система 100 для обслуживания нефтяной скважины 175, которая сканирует колонну 125, когда эта колонна 125 извлекается из скважины 175 или вводится в нее согласно примерному варианту осуществления настоящего изобретения. Нефтяная скважина 175 содержит буровую скважину, пробуренную или просверленную вглубь земли, чтобы достичь нефтеносной формации. Ствол скважины 175 заключен в трубу или магистраль (не показана явно на фиг.1), известную как «обсадная труба», которая зацементирована в нисходящей к формациям скважине и которая защищает скважину 175 от нежелательных пластов жидкостей и грязи.
В обсадной трубе находится труба 125, которая переносит нефть, газ, углеводороды, нефтяные продукты и (или) иные пластовые жидкости, такие как вода, к поверхности. В работе колонна насосных штанг (не показанная явно на фиг.1), размещенная внутри трубы 125, гонит нефть по стволу скважины вверх. Приводимая в движение толчками находящейся вверху скважины машиной, такой как станок-качалка, насосная штанга движется вверх и вниз, чтобы сообщать поступательное движение насосу, расположенному в нижней части скважины (не показан явно на фиг.1). С каждым толчком находящийся внизу насос перемещает нефть вверх по трубе 125 к устью скважины.
Как показано на фиг.1, обслуживающая бригада использует ремонтный или обслуживающий агрегат 140 для обслуживания скважины 175. Во время иллюстрируемой процедуры бригада вытягивает колонну 125 из скважины 175, например, чтобы починить или заменить находящийся внизу насос. Колонна 125 содержит колонну из тридцатифутовых секций (приблизительно 9,12 метров на секцию), каждая из которых именуется «звеном». Звенья свинчены вместе замками, соединительными муфтами или резьбовыми соединениями.
Бригада использует ремонтный агрегат 140 для извлечения колонны 125 шагами или этапами, обычно два звена на этап, известные как «секция». Агрегат 140 содержит стрелу или вылет 145 и трос 105, который бригада временно закрепляет на трубной секции 125. Катушка 110, барабан, ворот или полиспаст с приводом от двигателя тянет трос 105, посредством чего вытягивается или поднимается прикрепленная к нему трубная секция 125. Бригада поднимает трубную секцию 125 на расстояние по вертикали, приблизительно равное высоте стрелы 145, приблизительно на шестьдесят футов или два звена.
Конкретнее, бригада прикрепляет трос 105 к трубной секции 125, которая во время процедуры прикрепления расположена вертикально. Затем бригада поднимает колонну 125, как правило, при непрерывном извлечении, так что два звена извлекаются из скважины 175, тогда как часть трубной секции 125 ниже этих двух звеньев остается в скважине 175. Когда эти два звена выходят из скважины 175, оператор катушки 110 останавливает трос 105, что останавливает движение колонны 125 вверх. Затем бригада отделяет или отвинчивает два открытых звена от остальной части трубной секции 125, которая проходит в скважину 175.
Бригада повторяет процесс подъема и отделения двухзвенных секций колонны 125 из скважины 175 и размещает извлеченные секции в комплект размещенных вертикально звеньев, известный как «стенд» колонны 125. После извлечения полной трубной секции 125 из скважины 175 и обслуживания насоса бригада осуществляет пошаговый процесс извлечения труб в обратном направлении путем помещения секций 125 колонны назад в скважину 175. Иными словами, бригада использует агрегат 140 для восстановления секций 125 колонны путем нанизывания или «свинчивания» каждого звена и пошагового опускания секций 125 колонны в скважину 175.
Система 100 содержит систему измерительных приборов для слежения, сканирования, определения или оценивания колонны 125, пока колонна 125 перемещается в скважину 175 или из нее. Система измерительных приборов содержит трубный сканер 150, который получает информацию или данные о части колонны 145, которая находится в зоне 155 восприятия или измерений сканера. По линии 120 связи кодер 115 снабжает трубный сканер 150 информацией скорости, быстроты и(или) местоположения относительно колонны 125. Т.е. кодер 115 механически связан с барабаном 110, чтобы определять перемещение и (или) положение колонны 125 по мере того, как колонна 125 перемещается через измерительную зону 155.
В качестве альтернативы проиллюстрированному кодеру 115 некоторые другие виды датчика местоположения и (или) скорости могут определять, например, скорость стрелового блока или скорость вращения стрелового блока в оборотах в минуту («об/мин»). Типовые способы получения данных о местоположении или скорости могут включать в себя использование желографа (не показано), линейки желографов (не показано), измерительного колеса, насаженного на ходовую струну троса 105 (не показано) и счетчика спиц на шкиве кронблока (не показано), а также другие способы и устройства, известные специалистам.
Другая линия 135 данных соединяет трубный сканер 150 с вычислительным устройством, которое может быть, например, переносным компьютером 130, ручным компьютером, персональным устройством связи (PDA), сотовой системой, портативным радиоустройством, персональной системой отправки сообщений, беспроводным оборудованием или стационарным персональным компьютером (PC). Переносной компьютер 130 отображает данные, которые сканер 140 колонны получил от колонны 125. Персональный компьютер 130 может представлять данные колонны, например, графически. Обслуживающая бригада отслеживает или наблюдает отображенные данные на переносном компьютере 130 для оценивания состояния колонны 125. Обслуживающая бригада может сортировать колонну 125 согласно ее пригодности для продолжения службы, например.
Линия 135 связи может содержать прямую линию или часть более широкой сети связи, которая переносит информацию между прочими устройствами или аналогичными системами к системе 100. Кроме того, линия 135 связи может содержать тракт, например, через Интернет, интранет, частную сеть, телефонную сеть, сеть с Интернет-протоколом (IP), сеть с коммутацией пакетов, сеть с коммутацией каналов, локальную сеть (LAN), территориальную сеть (WAN), общегородскую сеть (MAN), телефонную сеть общего пользования (PSTN), беспроводную сеть или сотовую систему. Линия 135 связи может далее содержать сигнальный тракт, который является оптическим, оптоволоконным, проводным, беспроводным, проводной линией, волноводным или спутниковым, если упомянуть некоторые возможности. Сигналы, передаваемые по линии 135, могут нести или переносить данные или информацию в цифровом виде или посредством аналоговой передачи. Такие сигналы могут содержать модулированную электрическую, оптическую, сверхвысокочастотную, радиочастотную, ультразвуковую или электромагнитную энергию среди прочих видов энергии.
Переносной компьютер 130 обычно содержит аппаратное обеспечение и программное обеспечение. Аппаратное обеспечение может содержать различные компьютерные компоненты, такие как дисковая память, дисководы, микрофоны, оперативное запоминающее устройство (ОЗУ) (RAM), постоянно запоминающее устройство (ПЗУ) (ROM), один или несколько микропроцессоров, источники питания, видеоконтроллер, системную шину, дисплейный монитор, интерфейс связи и устройства ввода. Далее переносной компьютер 130 может содержать, например, цифровой контроллер, микропроцессор или какое-либо иное воплощение цифровой логики.
Переносной компьютер 130 исполняет программное обеспечение, которое может содержать операционную систему и один или несколько программных модулей для управления данными. Операционная система может быть, например, программным продуктом, который компания Microsoft Corporation из Рэдмонта, Вашингтон, продает под зарегистрированным товарным знаком WINDOWS. Модуль управления данными может хранить, сортировать и организовывать данные и может также обеспечить возможность черчения, построения графиков, построения таблиц или определения тенденций данных. Модуль управления данными может, например, быть программным продуктом или содержать программный продукт, который компания Microsoft Corporation продает под зарегистрированным товарным знаком EXCEL.
В одном примерном варианте осуществления настоящего изобретения многоцелевой компьютер функционирует как переносной компьютер 130. Множество программ может исполняться в перекрывающихся временных рамках или в виде, который представляется человеку-оператору параллельным или одновременным. Многоцелевая работа может содержать, например, квантование времени или разделение времени.
Модуль управления данными может содержать одну или несколько компьютерных программ или частей компьютерного исполняемого кода. В качестве нескольких примеров, модуль управления данными может содержать одну или несколько утилит, модуль или объект кода, системную программу, интерактивную программу, встраиваемое расширение, апплет (встраиваемое приложение), сценарий, скриптлет (апплет-сценарий), операционную систему, браузер, маркер объекта, автономную программу, язык, программу, не являющуюся автономной, программу, исполняемую компьютером 130, программу, которая выполняет рутинные операции эксплуатации или общего назначения, программу, которая запускается, чтобы позволить машине или человеку-пользователю взаимодействовать с данными, программу, которая создает или используется для создания другой программы, и программу, которая помогает пользователю в выполнении задачи, такой как взаимодействие с базой данных, обработка текстов, составление отчетности или управление файлами.
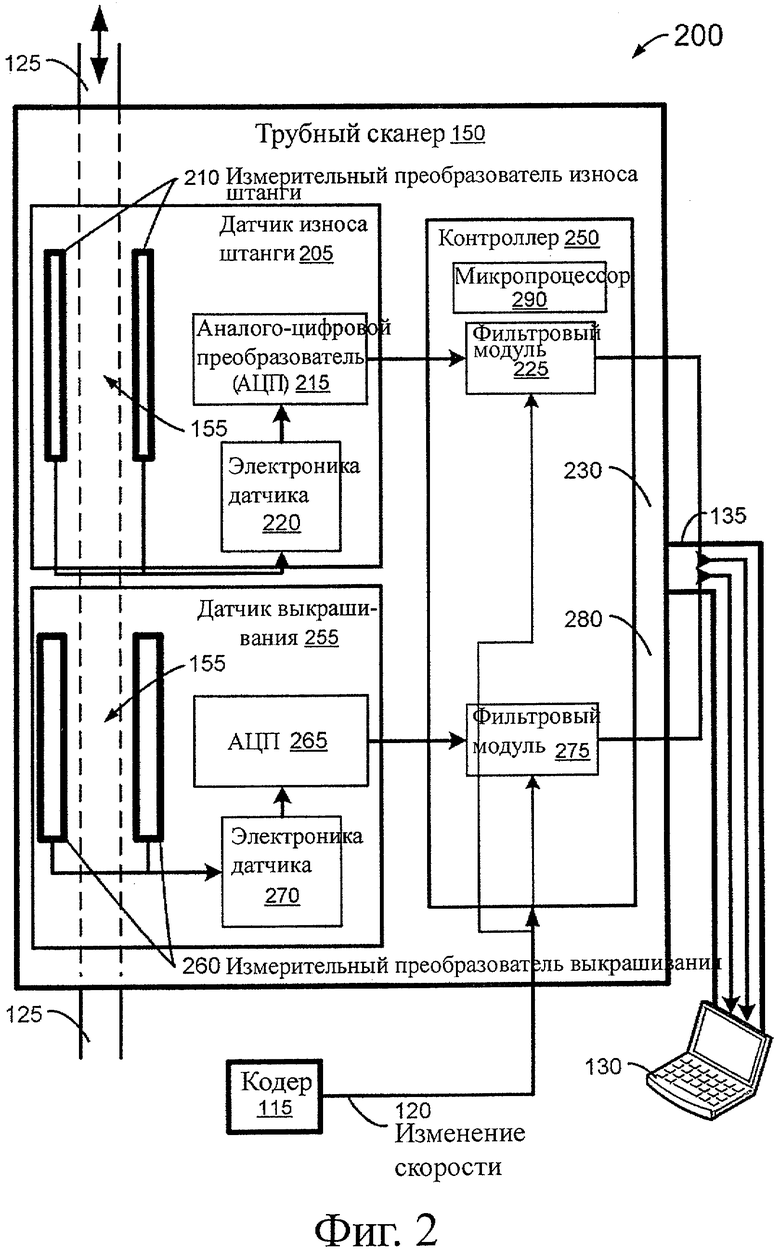
На фиг.2 иллюстрируется функциональная блок-схема системы 200 для сканирования колонны 125 труб, которая вставляется в нефтяную скважину 175 или извлекается из нее согласно примерному варианту осуществления настоящего изобретения. Так, система 200 обеспечивает примерный вариант осуществления измерительной системы, показанной на фиг.1 и обсужденной выше, и будет обсуждаться сама по себе.
Специалисты в информационных технологиях, вычислительной технике, обработке сигналов, датчиках и электронике поймут, что компоненты и функции, которые иллюстрируются как отдельные блоки на фиг.2 и ссылки на которые здесь повсюду даны на как таковые, не обязательно однозначно являются модулями. Далее содержимое каждого блока не обязательно расположено в одном физическом местоположении. В одном варианте осуществления настоящего изобретения некоторые блоки представляют виртуальные модули, и компоненты, данные и функции могут быть физически распределены. Кроме того, в некоторых примерных вариантах осуществления единственное физическое устройство может выполнять две или более функций, которые на фиг.2 иллюстрируются в двух или более отдельных блоках. Например, функция персонального компьютера 130 может быть объединена в трубном сканере 150, чтобы обеспечить единый аппаратный и программный элемент, который получает и обрабатывает данные и отображает обработанные данные в графическом виде для просмотра оператором, техником или инженером.
Трубный сканер 150 содержит датчик 205 износа штанги и датчик 255 выкрашивания для определения параметров, относящихся к непрерывному использованию колонны 125. Датчик 205 износа штанги определяет относительно большие дефекты или проблемы колонны, такие как утоньшение. Утоньшение стенок может быть, например, вследствие физического износа или истирания между колонной 125 и насосной штангой, которая осуществляет в ней возвратно-поступательное движение. При этом датчик 255 выкрашивания обнаруживает или находит изъяны меньшего размера, такие как выкрашивание, происходящее из-за коррозии или некоторых иных видов химического воздействия в скважине 175. Эти малые изъяны могут быть видны, например, невооруженным глазом или в микроскоп.
Включение датчика 205 износа штанги и датчика 255 выкрашивания в трубный сканер 150 предназначено для иллюстрации, а не ограничения. Трубный сканер 150 может содержать другой датчик или измерительное устройство, которое может быть приспособлено для конкретного применения, в том числе ультразвуковые датчики.
Например, измерительная система 200 может содержать муфтовый локатор, прибор, который обнаруживает трещины и щели в колонне, температурный измеритель и т.п. В одном примерном варианте осуществления настоящего изобретения сканер 150 содержит или соединен со счетчиком запаса, таким как счетчик запаса, описанный в публикации заявки на патент США №2004/0196032.
Трубный сканер 150 содержит также контроллер 250, который обрабатывает сигналы от датчика 205 износа штанги и датчика 255 выкрашивания. Примерный контроллер 250 имеет два фильтровых модуля 225, 275, каждый из которых, как подробнее обсуждено ниже, адаптивно или гибко обрабатывает сигналы датчиков. В одном примерном варианте осуществления контроллер 250 обрабатывает сигналы согласно измерению скорости от кодера 115.
Контроллер 250 может содержать компьютер, микропроцессор 290, вычислительное устройство или какое-либо иное воплощение программируемой или реализованной аппаратно цифровой логики. В одном примерном варианте осуществления контроллер 250 содержит одну или несколько специализированных интегральных микросхем (ASICs) или интегральных схем цифровой обработки сигналов (DSP), которые выполняют функции фильтров 255, 275, как описано ниже. Фильтровые модули 255, 275 могут содержать исполняемые коды, хранящиеся в ПЗУ, программируемом ПЗУ (ППЗУ) (PROM), ОЗУ, в оптическом формате, на жестком диске, на магнитном носителе, ленте, бумаге или каком-либо ином машиночитаемом носителе.
Датчик 205 износа штанги содержит измерительный преобразователь 210, который, как описано выше, выдает электрический сигнал, содержащий информацию о секции колонны 125, которая находится в измерительной зоне 155. Электроника 220 датчика усиливает или согласует этот выходной сигнал и подает согласованный сигнал на АЦП (аналого-цифровой преобразователь) 215. АЦП 215 преобразует этот сигнал в цифровой формат, как правило, обеспечивая отсчеты или мгновенные снимки толщины участка колонны 125, который располагается в измерительной зоне 155.
Фильтровый модуль 225 износа штанги принимает отсчеты или мгновенные снимки из АЦП 215 и осуществляет цифровую обработку этих сигналов для облегчения интерпретации сигналов для машины или человека. Линия 135 связи переносит обработанные цифровые сигналы 230 из фильтрового модуля 255 износа штанги к переносному компьютеру 130 для записи и (или) просмотра одним или несколькими членами обслуживающей бригады. Обслуживающая бригада может наблюдать обработанные данные для оценки колонны 125 для ведущегося обслуживания.
Аналогично датчику 205 износа штанги датчик 255 выкрашивания содержит измерительный преобразователь 260 выкрашивания, электронику 270 датчика, которая усиливает выход этого преобразователя, и АЦП 265 для оцифровки и (или) дискретизации усиленного сигнала от электроники 270 датчика. Подобно фильтровому модулю 225 износа штанги фильтровый модуль 275 выкрашивания осуществляет цифровую обработку отсчетов из АЦП 265 и выдает сигнал 280, который проявляет улучшенную верность воспроизведения сигнала для отображения на переносном компьютере 130.
Каждый из измерительных преобразователей 210, 260 генерирует сигнал возбуждения и выдает сигнал согласно отклику колонны 125 на этот сигнал возбуждения. Например, один из измерительных преобразователей 210, 260 может генерировать магнитное поле и детектировать воздействие или искажение этого поля колонной 125. В одном примерном варианте осуществления измерительный преобразователь 260 выкрашивания содержит катушки возбуждения, которые генерируют магнитное поле, и датчики на эффекте Холла или магнитные воспринимающие катушки, которые детектируют напряженность поля.
В одном примерном варианте осуществления один из измерительных преобразователей 210, 260 может выдавать ионизирующее излучение, такое как гамма-излучение, падающее на колонну 125. Колонна 125 блокирует или отражает часть этого излучения и пропускает другую часть этого излучения. В данном примере один или оба из измерительных преобразователей 210, 260 содержит детектор, который выдает электрический сигнал с напряженностью или амплитудой, которая меняется согласно числу продетектированных гамма-квантов. Этот детектор может, например, подсчитывать отдельные гамма-кванты путем выдачи дискретного сигнала, когда гамма-квант взаимодействует с детектором.
Теперь будут описаны процессы примерных вариантов осуществления настоящего изобретения со ссылкой на фиг.3-11. Примерный вариант осуществления настоящего изобретения может содержать одну или несколько компьютерных программ или воплощаемых в компьютере способов, которые реализуют функции или этапы, описанные здесь и проиллюстрированные в примерных блок-схемах алгоритмов, графиках и наборах данных по фиг.3-11 и на схемах по фиг.1 и 2. Однако следует понимать, что может быть много различных путей воплощения изобретения в компьютерном программном обеспечении, и изобретение не следует толковать как ограниченное каким-либо набором компьютерных программных кодов. Далее опытный программист, например, будет способен написать такую компьютерную программу для воплощения раскрытого изобретения на основе примерных системных архитектур, таблиц данных, графиков данных и блок-схем алгоритмов и связанного с ними описания в тексте заявки.
Поэтому раскрытие конкретного набора программных кодовых команд не считается нужным для адекватного понимания того, как сделать и использовать изобретение. Изобретенные функциональные возможности любых заявленных процесса, способа или компьютерной программы будут поясняться более подробно в нижеследующем описании совместно с остальными чертежами, иллюстрирующими характерные функции и программные алгоритмы.
Некоторые этапы в описанных ниже процессах должны естественным образом продолжать другие, чтобы настоящее изобретение работало, как описано. Однако настоящее изобретение не ограничено порядком описанных этапов, если такой порядок или последовательность не изменяет нежелательным образом функциональные возможности настоящего изобретения. То есть констатируется, что некоторые этапы могут выполняться до или после других этапов или параллельно с другими этапами без отхода от объема и сущности настоящего изобретения.
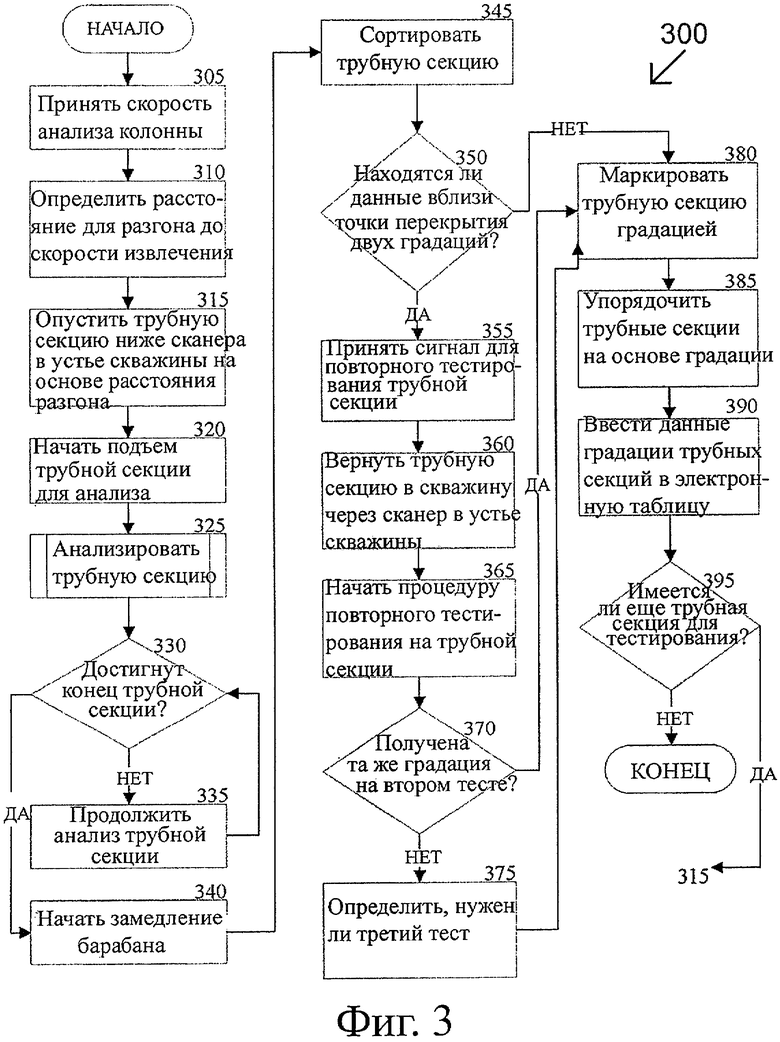
На фиг.3 примерный процесс 300 получения информации о колонне 125, которую вводят в нефтяную скважину 175 или извлекают из нее, показан и описан в рабочей среде типового ремонтного агрегата 140 и трубного сканера 150 по фиг.1 и 2. На фиг.1, 2 и 3 примерный способ 300 начинается на этапе СТАРТ и переходит к этапу 305, на котором принимают скорость анализа колонны. Эта скорость анализа колонны может быть введена в систему на компьютере 130 или ремонтном агрегате 140. Скорость анализа колонны может быть одной и той же для всех работ по анализу или отличаться в зависимости от типа магистрали, характеристик используемых датчиков и условий анализа. В одном примерном варианте осуществления скорость анализа колонны является постоянной для всех приложений и особенность изменения скорости анализа колонны не нужна. В одном примерном варианте осуществления скорость анализа колонны находится между двумя и четырьмя линейными футами в минуту, однако специалисты поймут, что для анализа колонны 125 можно использовать скорости выше и ниже этого диапазона и при этом достигать целей настоящего изобретения.
На этапе 310 определяют расстояние удаления колонны, которое необходимо ремонтному агрегату 140 для разгона до скорости анализа. В одном примерном варианте осуществления для определения этого расстояния используют компьютер 130. Начальный участок трубной секции 125, подлежащий анализу, опускают ниже трубного сканера 150 на расстояние больше и равное расстоянию, которое требуется ремонтному агрегату 1400 для разгона до скорости анализа на этапе 315. В одном примерном варианте осуществления трубную секцию 125 опускают так, чтобы иметь соответствующую скорость в диапазоне скоростей анализа для всех секций колонны 125, которую следует анализировать. Однако в альтернативном примерном варианте осуществления этапы определения расстояния разгона и опускания трубной секции 125 на это расстояние могут быть пропущены, и участок трубной секции 125 можно анализировать на скорости анализа.
На этапе 320 ремонтный агрегат 140 начинает поднимать трубную секцию 125 для анализа трубным сканером 150. Трубный сканер 150 анализирует трубную секцию 125 на этапе 325. На этапе 330 выдается запрос для определения того, достигнут ли конец трубной секции 125. Конец трубной секции 125 можно определить визуально оператором ремонтного агрегата 140 или другими на месте работы. Помимо этого, к трубному сканеру 150 можно добавить датчики для обнаружения каждого из сочленений и передавать эту информацию в компьютер 130, который может определить, когда достигнут конец конкретной трубной секции 125. В другом примерном варианте осуществления конец цикла сканирования можно определить анализом сигнала кодера 115. Когда сигнал кодера 115 показал, что скорость барабана 110 замедляется, останавливается, а затем реверсируется, компьютер 130 можно запрограммировать для вынесения решения о том, что это точка, которая должна быть концом цикла анализа. В еще одном примерном варианте осуществления компьютер 130 можно запрограммировать для оценивания данных датчика и кодера на просмотр конкретных длин колонны 125, которые можно запрограммировать в компьютер 130 в начальный момент времени или находясь на буровой площадке, и конкретное число стыков (не показано). Например, компьютер 130 можно запрограммировать для оценки данных при просмотре длины трубной секции 125, которая равна шестидесяти линейным футам, и прохождении двух стыков мимо трубного сканера 150. Когда компьютер 130 определит, что второй стык миновал и прошли приблизительно шестьдесят футов колонны 125, компьютер может принять заключить, что достигнут конец трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 335, где трубный сканер 150 продолжает анализировать трубную секцию 125. Затем процесс возвращается к этапу 330. С другой стороны, если достигнут конец трубной секции 125, ветвь «ДА» следует к этапу 340.
На этапе 340 ремонтный агрегат 140 начинает замедлять барабан 110, который поднимает трубную секцию 125 из скважины 175. Секция 125 скважины, которую уже проанализировали, сортируется на этапе 345. Сортировка трубопровода обычно проводится путем просмотра данных анализа. В одном примерном варианте осуществления трубной секции 125 могут получать одну из четырех градаций, установленных Американским нефтяным институтом: желтую, голубую, зеленую и красную, как описано в Specification for Casing and Tubing: API Specification 5CT, Third ed., December 1, 1990, и Recommended Practice for Field Inspection of New Casing, Tubing, and Plain-End Drill Pipe: API Recommended Practice 5A5, Fourth ed., May 1, 1989, каждый из которых включен сюда посредством ссылки. Трубная секция 125 обычно получает градацию «желтая», когда потери корпуса менее шестнадцати процентов. Трубная секция 125 обычно получает градацию «голубая», когда потери корпуса менее тридцати одного процента, но больше или равны шестнадцати процентам. Трубная секция 125 обычно получает градацию «зеленая», когда потери корпуса менее пятидесяти одного процента, но больше или равны тридцати одному проценту. Трубная секция 125 обычно получает градацию «красная», когда потери корпуса более пятидесяти одного процента.
На этапе 350 выдается запрос для определения того, находятся ли данные, использованные при сортировке, на пороге или вблизи порога двух градаций. Это определение можно выполнять компьютером 130 или оператором ремонтного агрегата 140. В одном примерном варианте осуществления данные, показывающие, что градация колонны близка либо к голубой, либо к зеленой, имеют наивысший приоритет, потому что многие в промышленности будут снова использовать подъемные трубы с градацией «голубая», но будут отклонять подъемную трубу, если она получает градацию «зеленая». Определение того, близки ли данные к порогу градации, может быть основано на заранее заданном уровне, который можно задать оператору или запрограммировать в компьютер 130. Если данные анализа не находятся вблизи порога двух градаций, ветвь «НЕТ» следует к этапу 380. В противном случае ветвь «ДА» следует к этапу 355, где принимается сигнал повторно протестировать трубную секцию 125. Этот сигнал может включать в себя звуковой сигнал, способный быть принятым в компьютере 130 или в ремонтном агрегате 140. В другом примерном варианте осуществления этот сигнал может выдаваться оператором ремонтного агрегата 140 голосом или руками, что информирует других о том, что трубную секцию 125 нужно протестировать повторно.
Трубную секцию 125 опускают обратно в скважину 175 через трубный сканер 150 на этапе 360. На этапе 365 тестирование для получения данных анализа для трубной секции 125 завершают таким же образом, как и в исходном тесте. На этапе 370 выдается запрос для определения того, получила ли трубная секция 125 ту же самую градацию на втором тесте, что и на первом тесте. Если трубная секция 125 не получает той же самой градации, ветвь «НЕТ» следует к этапу 375, где делается определение того, нужно ли проводить третий тест на трубной секции 125. Это определение может сделать оператор ремонтного агрегата 140 или его можно запрограммировать в компьютер 130. Если проводится третий тест, процесс возвращается на этап 365. В противном случае процесс продолжается к этапу 380. Возвращаясь к этапу 370, если трубная секция 125 приняла ту же самую градацию на втором тесте, ветвь «ДА» следует к этапу 380, где трубную секцию 125 маркируют градацией. В одном примерном варианте осуществления трубную секцию 125 маркируют градацией путем нанесения распылителем краски с тем же самым цветом, что и градация, на участок наружной поверхности трубной секции 125. В другом примерном варианте осуществления, когда компьютер 130 определяет градацию для трубной секции 125, цвета или текст автоматически наносятся на трубную секцию 125 маркировочным аппаратом, расположенным на верху трубного сканера 150.
На этапе 385 трубной секции 125 упорядочивают по градации. Данные о градации труб вводят в электронную таблицу на этапе 390. Данные градации могут вводиться вручную оператором или автоматически загружаться из данных сканирования и вводиться в электронную таблицу в компьютере 130. В одном примерном варианте осуществления данные градации вводят в представление или график данных каротажа на основе глубины, на которой конкретный участок колонны 125 располагался во время работы скважины 175. На этапе 395 выдается запрос на определение того, имеется ли еще трубная секция 125 для тестирования. Если так, то ветвь «ДА» следует к этапу 315. В противном случае ветвь «НЕТ» следует к этапу КОНЕЦ.
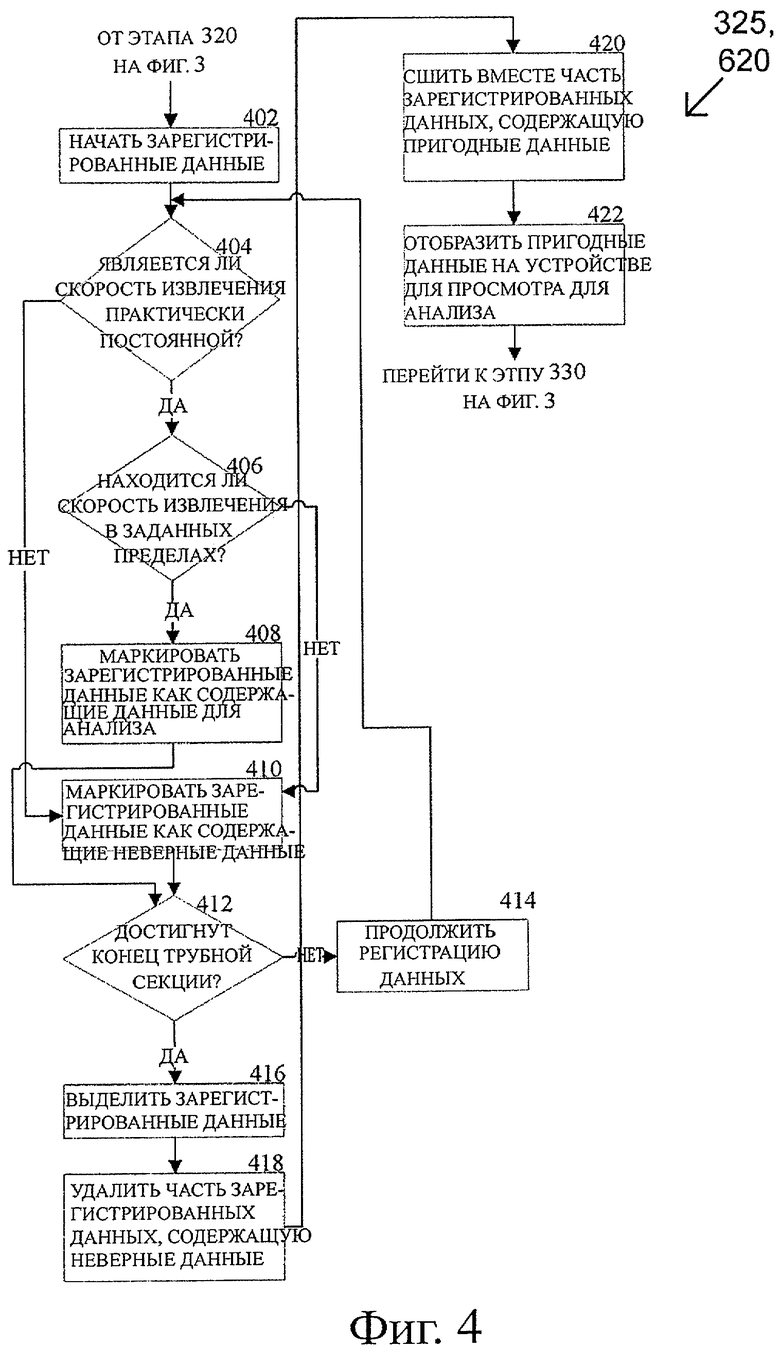
Фиг.4 является логической схемой алгоритма примерного способа анализа секции колонны 125 для определения градации колонны 125 по сравнению с этапом 325 по фиг.3 и 620 по фиг.6. На фиг.1, 2, 3 и 4 примерный способ 325, 620 начинается с того, что компьютер 130 регистрирует данные, которые он принимает от датчиков в трубном сканере 150 на этапе 402. На этапе 404 выдается запрос для определения того, является ли скорость удаления трубной секции 125 постоянной. Скорость колонны можно определить путем оценки сигнала, посланного из кодера 115 через барабан 110 в компьютер 130. В одном примерном варианте осуществления компьютер 130 запрограммирован с допусками для скорости колонны, чтобы определять, считается ли диапазон скоростей практически постоянным. Если скорость колонны не является по существу постоянной, ветвь «НЕТ» следует к этапу 410. В противном случае ветвь «ДА» следует к этапу 406.
На этапе 406 компьютером 130 выдается запрос, находится ли скорость удаления в заданном диапазоне. В одном примерном варианте осуществления оптимальная скорость удаления находится между двумя и четырьмя футами в минуту, однако можно использовать и другие скорости выше и ниже этого диапазона, и скорости анализа могут зависеть от типа перемещаемой колонны 125 и характеристик датчиков, используемых для анализа колонны 125. Если скорость удаления находится в заданном диапазоне, ветвь «ДА» следует к этапу 408, где извлекаемые данные анализа «маркируют» как содержащие данные для анализа. Затем процесс продолжается на этапе 412. С другой стороны, если скорость удаления не находится в заданном диапазоне, ветвь «НЕТ» следует к этапу 410, где данные анализа «маркируют» как содержащие неверные данные. В одном примерном варианте осуществления данные анализа отображаются на просмотровом экране компьютера 130, на котором неверные данные маркируют размещением знаков «X» по участку графика, содержащему эти неверные данные. В другом примерном варианте осуществления отображенные данные можно пометить цветом. Например, неверные данные на графике можно высвечивать красным, тогда как верные данные можно высвечивать зеленым. В еще одном примерном варианте осуществления данные анализа можно отображать так, что неверные данные не отображаются на графике анализа.
На этапе 412 выдается запрос, достиг ли трубный сканер 150 конца трубной секции 125. Датчики можно прикрепить к компьютеру 130 в трубном сканере 150 для восприятия соединений, чтобы определить, достигнут ли конец трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 414, где компьютер 130 продолжает регистрировать и анализировать данные анализа. Затем процесс возвращается к этапу 404. С другой стороны, если конец трубной секции 125 достигнут, ветвь «ДА» следует к этапу 416, где компьютер 130 принимает зарегистрированные данные. На этапе 418 компьютер 130 удаляет часть зарегистрированных данных, содержащую неверные данные, из совокупности построенных данных для трубной секции 125. Компьютер 130 «сшивает» вместе оставшиеся верные данные анализа в практически единственную строку данных для каждой трубной секции 125 на этапе 420. На этапе 422 компьютер 130 отображает верные данные на мониторе или просмотровом устройстве для анализа и сортировки трубной секции 125. Затем процесс возвращается к этапу 330 по фиг.3.
Фиг.9, 10А и 10В дают примерный вид этапов 416-420 по фиг.4. На фиг.9 примерное отображение 900 данных анализа включает в себя данные 902 скорости и данные 904 сканирования или анализа. Каждые данные разделены на пять разделов, показанных над данными. Участок 905 будет считаться неверными данными, потому что скорость удаления не постоянна, не находится в заданном диапазоне 2,6 футов в минуту. Участок 910 будет считаться верными данными, потому что скорость удаления для трубной секции 125 постоянна и равна 2,6 фута в минуту. Следует отметить, что скорость в разделе 910 не является в точности одной и той же и термин «постоянная» не означает синонима «в точности та же». По меньшей мере некоторые малые флюктуации в скорости удаления или введения колонны 125 допустимы, и пределы могут программироваться в компьютер 130. Участок 915 будет рассматриваться как неверные данные, потому что скорость удаления не постоянна и не попадает в заданный диапазон скоростей. Участок 920 будет рассматриваться как верные данные, потому что скорость относительно постоянна и находится в заданном диапазоне. Наконец, участок 925 будет рассматриваться как неверные данные, потому что скорость не постоянна и не лежит в заданном диапазоне. Участок 905 является примером того, что ремонтный агрегат 140 начинает удаление трубной секции 125 из скважины 175, тогда как участок 925 является примером достижения конца трубной секции 125 и замедления барабана 110 ремонтного агрегата 140.
На фиг.10А показан другой примерный вид 1000 данных сканирования или анализа. Поскольку сделано определение того, что является верными и неверными данными, данные скорости удалены из этого отображения. Помимо того, неверные сегменты данных анализа удалены из отображения компьютером 130. Таким образом, данные анализа из разделов 905, 915 и 925 удалены, а данные анализа из разделов 910 и 920 оставлены. На фиг.10В показано отображение, описывающее этап 420 на фиг.4. На отображении 1020 данные анализа из разделов 910 и 920 «сшиты» вместе, чтобы получить одну непрерывную линию данных 1025. За счет удаления неверных данных и сшивания верных данных вместе трубную секцию 125 можно легче, а тем самым и увереннее сортировать компьютером 130 или оператором ремонтного агрегата 140.
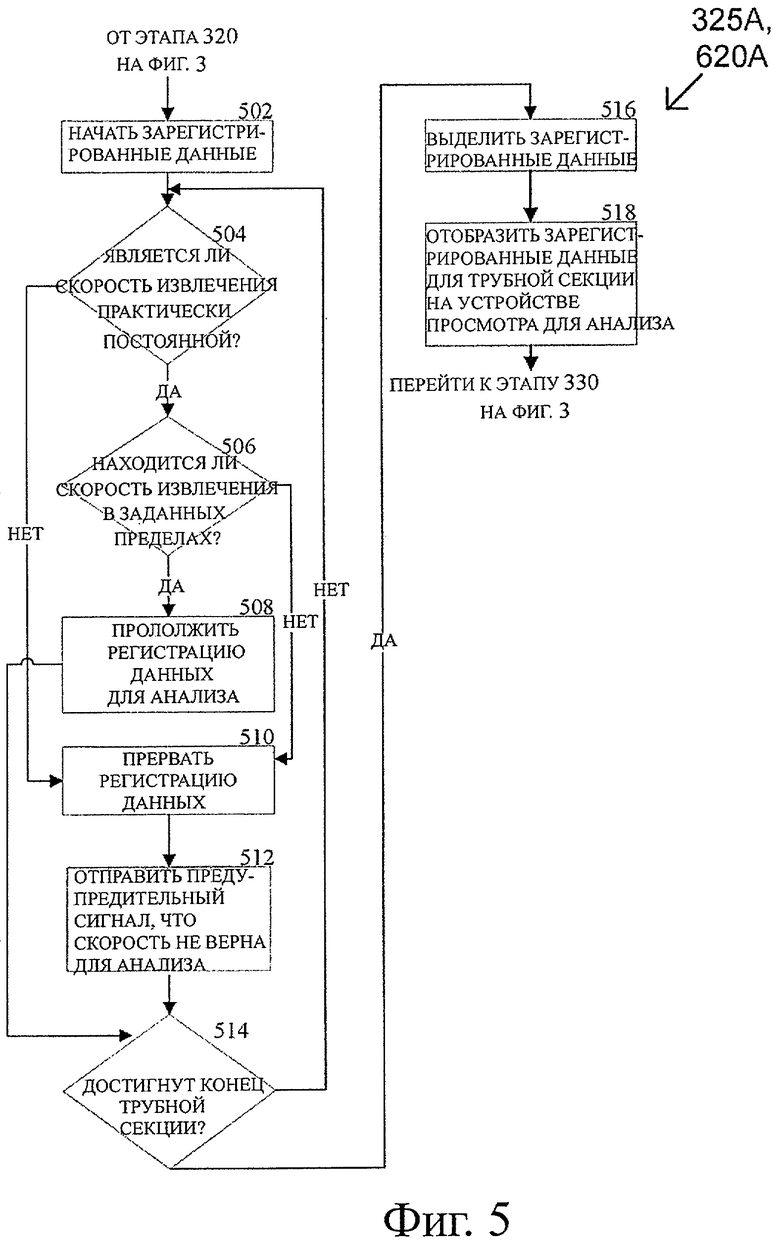
Фиг.5 представляет собой логическую схему алгоритма, иллюстрирующую другой примерный способ анализа и отображения участка данных анализа колонны для определения градации трубной секции 125 при завершении этапа 325 по фиг.3 и этапа 620 по фиг.6. Со ссылками на фиг.1, 2, 3 и 5, примерный способ 325А, 620А начинается с того, что компьютер 130 регистрирует данные, которые он принимает от датчиков в трубном сканере 150 на этапе 502. На этапе 504 выдается запрос для определения того, является ли скорость удаления трубной секции 125 практически постоянной. Скорость колонны можно определить путем оценки сигнала, посланного из кодера 115 через барабан 110 в компьютер 130. В одном примерном варианте осуществления компьютер 130 запрограммирован с допусками для скорости колонны, чтобы определять, считается ли диапазон скоростей практически постоянным. Если скорость колонны не является по существу постоянной, ветвь «НЕТ» следует к этапу 510. В противном случае ветвь «ДА» следует к этапу 506.
На этапе 506 компьютером 130 выдается запрос, находится ли скорость удаления в заданном диапазоне. В одном примерном варианте осуществления оптимальная скорость удаления находится между двумя и четырьмя футами в минуту, однако можно использовать и другие скорости выше и ниже этого диапазона, и скорости анализа могут зависеть от типа перемещаемой колонны 125 и характеристик датчиков, используемых для анализа колонны 125. Если скорость удаления находится в заданном диапазоне, ветвь «ДА» следует к этапу 508, где компьютер 130 продолжает регистрировать принимаемые данные для анализа. Затем процесс переходит к этапу 514. С другой стороны, если скорость удаления не лежит в заданном диапазоне, ветвь «НЕТ» следует к этапу 510, где компьютер 130 останавливает построение графика из принятых данных анализа до тех пор, пока принимаемые данные не станут удовлетворять требованиям по скорости и согласованности. На этапе 512 принимается предупредительный сигнал о том, что скорость не верна для целей анализа. В одном примерном варианте осуществления этот предупредительный сигнал представляет собой визуальный или звуковой сигнал в компьютере 130 и может быть также виден оператору ремонтного агрегата 140, однако могут быть использованы и иные способы сигнализации, известные специалистам.
На этапе 514 выдается запрос для определения того, достиг ли трубный сканер 150 конца трубной секции 125. Датчики можно прикрепить к компьютеру 130 в трубном сканере 150 для восприятия сочленений, чтобы определить, достигнут ли конец трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 504, где компьютер 130 продолжает регистрировать и анализировать данные анализа. С другой стороны, если конец трубной секции 125 достигнут, ветвь «ДА» следует к этапу 516, где компьютер 130 принимает зарегистрированные данные. На этапе 518 компьютер 130 удаляет часть зарегистрированных данных, содержащую неверные данные, из совокупности построенных данных для трубной секции 125. Затем процесс возвращается к этапу 330 по фиг.3. Способ, раскрытый на фиг.5, исключает необходимость удалять неверные данные из верных данных и сшивать оставшиеся участки верных данных вместе, потому что фактически только верные данные строятся на графике компьютером 130.
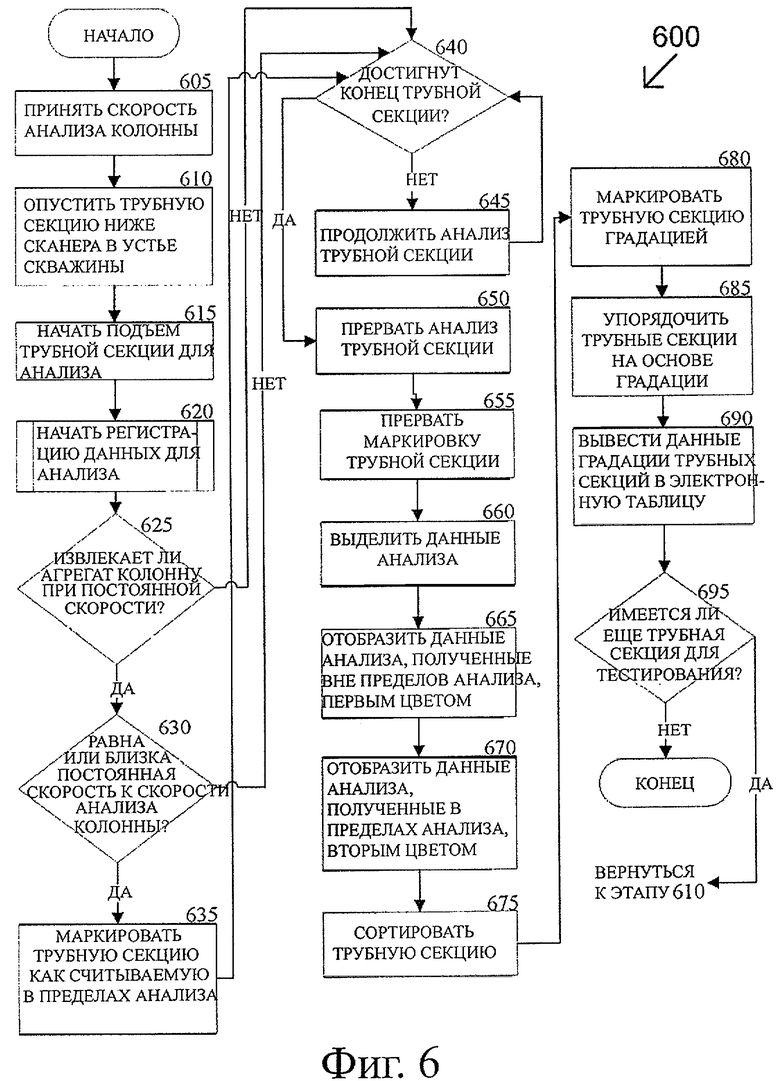
Фиг.6 представляет собой логическую схему алгоритма, иллюстрирующую этапы примерного способа 600 получения информации о трубных секциях 125, которые вдвигаются в нефтяную скважину или извлекаются из нее в рабочей среде типового ремонтного агрегата 140 по фиг.1. Со ссылками на фиг.1, 2 и 6, примерный способ 600 начинается с этапа НАЧАЛО и переходит к этапу 605, на котором принимается скорость анализа колонны. В одном примерном варианте осуществления скорость анализа колонны можно вводить в систему в компьютере 130 или ремонтном агрегате 140. Скорость анализа колонны обычно находится между двумя и четырьмя линейными футами в минуту, однако специалисты поймут, что для анализа колонны 125 можно использовать и скорости выше и ниже этих пределов, а скорость анализа может зависеть от типа колонны 125 и характеристик используемых датчиков и методов анализа.
Начальный участок подлежащей анализу трубной секции 125 опускается ниже трубного сканера 150 на этапе 610. В одном примерном варианте осуществления трубная секция 125 опускается так, чтобы иметь постоянную скорость в диапазоне скоростей анализа для большинства анализируемых трубных секций 125. На этапе 615 ремонтный агрегат 140 начинает поднимать трубную секцию 125 для анализа трубным сканером 150. Трубный сканер 150 анализирует трубную секцию 125 на этапе 620.
На этапе 625 выдается запрос для определения того, работает ли барабан 110, перемещающий трубную секцию 125, с практически постоянной скоростью. Если так, то ветвь «ДА» следует к этапу 630. В противном случае ветвь «НЕТ» следует к этапу 640. На этапе 630 выдается запрос для определения того, является ли постоянная скорость скоростью анализа либо близка ли постоянная скорость к скорости анализа. Если нет, то ветвь «НЕТ» следует к этапу 640. С другой стороны, если эта скорость равна или практически близка к скорости анализа, ветвь «ДА» следует к этапу 635, где трубный сканер 150 маркирует трубную секцию 125 как считываемую в диапазоне анализа. В одном примерном варианте осуществления трубную секцию 125 маркируют видимым цветом по внешней поверхности трубной секции 125, чтобы дать возможность оператору знать, какие части трубной секции 125 получили анализ при назначенной скорости. В данном примерном варианте осуществления распылительная система может помещаться возле вершины трубного сканера 150.
На этапе 640 выдается запрос для определения того, достигнут ли конец трубной секции 125. Конец трубной секции 125 может быть определен визуально оператором ремонтного агрегата 140 или другими на рабочем месте. В другом примерном варианте осуществления к трубному сканеру 150 можно добавить датчики для обнаружения каждого из сочленений, которые удерживают вместе секции колонны 125, и передачи информации к компьютеру 130, который может определить, когда достигнут конец конкретной трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 645, где трубный сканер 150 продолжает анализировать трубную секцию 125. Затем процесс возвращается к этапу 640. С другой стороны, если конец трубной секции 125 достигнут, ветвь «ДА» следует к этапу 650.
На этапе 650 трубный сканер 150 останавливает анализ трубной секции 125. Трубный сканер 150 останавливает маркировку трубной секции на этапе 655. Данные анализа извлекаются на этапе 660. На этапе 665 компьютер 130 отображает в первом цвете данные анализа, которые были получены вне пределов скоростей анализа. В одном примерном варианте осуществления данные, полученные вне диапазона скоростей анализа, высвечиваются или отображаются красным. Компьютер 130 отображает во втором цвете данные анализа, полученные в пределах скоростей анализа и при практически постоянной скорости. В одном примерном варианте осуществления данные, которые получены в пределах требуемых параметров, высвечиваются или отображаются зеленым. Трубную секцию 125, которая только что была проанализирована и отображена, сортируют на этапе 675 путем просмотра закодированных цветами данных анализа. Трубную секцию 125 маркируют градацией на этапе 680. В одном примерном варианте осуществления трубную секцию 125 можно маркировать цветом или текстом для указания полученной градации. В другом примерном варианте осуществления, когда компьютер 130 определяет градацию для трубной секции 125, цвета или текст автоматически наносятся на трубную секцию 125 маркировочным аппаратом на верху трубного сканера 150.
На этапе 685 трубные секции 125 упорядочивают по градации. Данные градации труб вводятся в электронную таблицу на этапе 690. Данные градации могут вводиться вручную оператором или автоматически загружаться из данных сканирования и вводиться в электронную таблицу в компьютере 130. На этапе 695 выдается запрос для определения того, есть ли еще трубная секция 125 для тестирования. Если да, то ветвь «ДА» следует к этапу 610. В противном случае ветвь «НЕТ» следует к этапу КОНЕЦ.
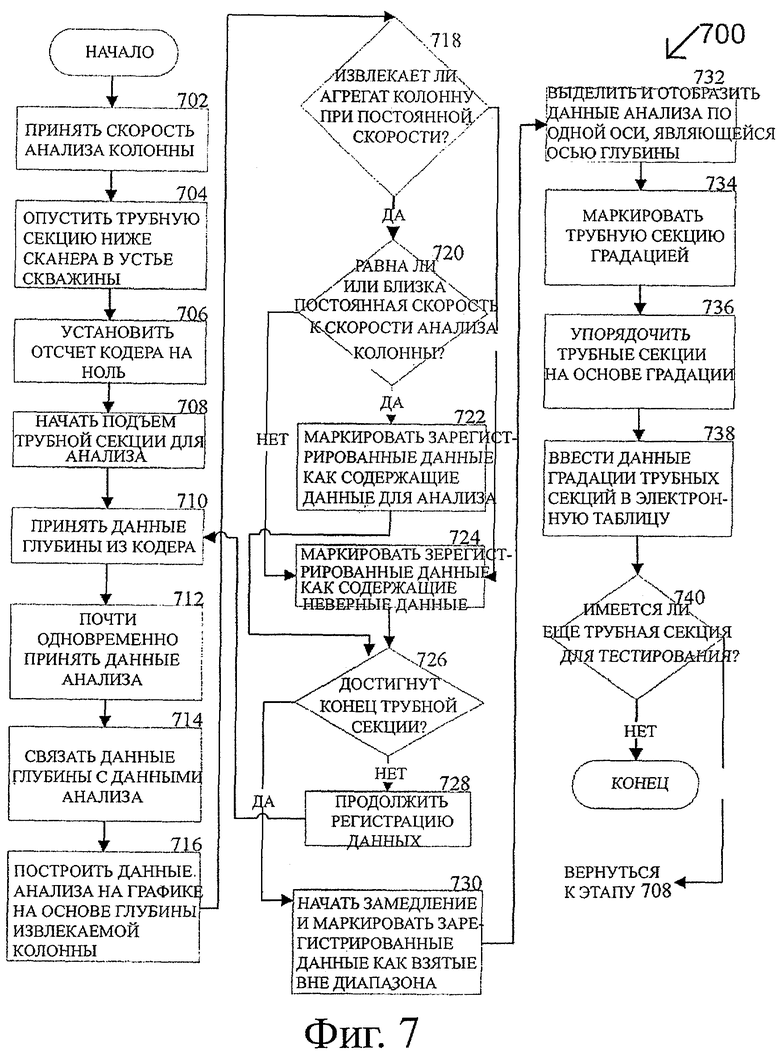
Фиг.7 представляет собой логическую схему алгоритма, иллюстрирующую этапы примерного способа 700 получения информации о трубных секциях 125, которые вводятся в нефтяную скважину 175 или извлекаются из нее, и построения этой информации в виде графика согласно глубине или длине трубных секций 125 в рабочей среде типового ремонтного агрегата 140 по фиг.1. Со ссылкой на фиг.1, 2 и 7, примерный способ 700 начинается на этапе НАЧАЛО и переходит к этапу 702, на котором принимается скорость анализа колонны. В одном примерном варианте осуществления скорость анализа колонны можно вводить в систему в компьютере 130 или ремонтном агрегате 140.
Начальный участок подлежащей анализу трубной секции 125 опускается ниже трубного сканера 150 на этапе 704. В одном примерном варианте осуществления трубная секция 125 опускается как раз ниже датчиков трубного сканера 150, так что точка нулевой глубины может быть установлена в кодере 115 или компьютере 130. На этапе 706 отсчет кодера устанавливается на ноль. Отсчет кодера обычно отображается в компьютере 130 или в кабине 140 ремонтного агрегата 140. В одном примерном варианте осуществления отсчет кодера устанавливается на ноль перед тем, как первую секцию 125 извлекают из скважины 175. В другом примерном варианте осуществления отсчет кодера 115 можно установить на ноль для каждой трубной секции 125 перед удалением этой конкретной трубной секции 125 из скважины 175.
На этапе 708 барабан 110 ремонтного агрегата 140 начинает удалять трубную секцию 125 из скважины 175. Компьютер 130 принимает данные глубины или линейного расстояния из кодера 115 на этапе 710. Компьютер 130 принимает также данные анализа от датчиков трубного сканера 150 в то же самое или почти в то же самое время, когда принимаются данные глубины из кодера 115 на этапе 712. На этапе 714 компьютер 130 связывает данные глубины с данными анализа. Компьютер 130 генерирует таблицу и строит график данных анализа в зависимости от глубины положения удаляемой трубной секции 125 на этапе 716.
На этапе 718 выдается запрос для определения того, перемещает ли барабан 110 трубную секцию 125 с практически постоянной скоростью. Если да, ветвь «ДА» следует к этапу 720. В противном случае ветвь «НЕТ» следует к этапу 724. На этапе 720 выдается запрос для определения того, равна ли или близка постоянная скорость к скорости анализа колонны. Если нет, ветвь «НЕТ» следует к этапу 724. С другой стороны, если скорость равна или практически близка к скорости анализа, ветвь «ДА» следует к этапу 722, где компьютер 130 маркирует проанализированные данные как верные данные, потому что он считал их в пределах практически постоянной заранее заданной скорости анализа колонны. Затем процесс переходит к этапу 726.
На этапе 724, если удаление было не с постоянной скоростью или скорость не была в пределах требуемого диапазона, компьютер 130 маркирует зарегистрированные данные как содержащие неверные данные. В одном примерном варианте осуществления компьютер 130 может вводить символ для отделения верных данных анализа от неверных данных анализа. В другом примерном варианте осуществления компьютер 130 может высвечивать или отображать верные данные одним цветом и высвечивать или отображать неверные данные другим цветом. В еще одном примерном варианте осуществления компьютер 130 может отображать только верные данные.
На этапе 726 выдается запрос для определения того, достигнут ли конец трубной секции 125. Конец трубной секции 125 может быть определен визуально оператором ремонтного агрегата 140 или другими на рабочем месте. В другом примерном варианте осуществления к трубному сканеру 150 можно добавить датчики для обнаружения каждого из сочленений, которые удерживают вместе секции колонны 125, и передачи информации к компьютеру 130, который может определить, когда достигнут конец конкретной трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 728, где трубный сканер 150 продолжает анализировать трубную секцию 125. Затем процесс возвращается к этапу 710. С другой стороны, если конец трубной секции 125 достигнут, ветвь «ДА» следует к этапу 730.
На этапе 730 барабан 110 начинает замедляться и скорость извлечения трубной секции 125 снижается. Компьютер 130 начинает маркировать или обозначать данные анализа как неверные данные, потому что скорость находится вне требуемых пределов. Данные анализа выделяются и отображаются по одной из осей, являющейся осью глубины трубной секции 125 или длины трубной секции 125 на этапе 732. Компьютер 130 может отображать выделенные данные анализа различными цветами на основе верных и неверных данных, либо отображать только верные данные, либо следовать методу, обсуждавшемуся на фиг.3 и показанному на фиг.9, 10А и 10В. Трубная секция 125 маркируется градацией на этапе 734. В одном примерном варианте осуществления трубную секцию 125 можно маркировать цветом или текстом для обозначения полученной градации. В другом примерном варианте осуществления, когда компьютер 130 определяет градацию для трубной секции 125, цвета или текст автоматически наносятся на трубную секцию 125 маркирующим аппаратом, расположенным на верху трубного сканера 150.
На этапе 736 трубные секции 125 упорядочивают по градации. Данные градации труб вводятся в электронную таблицу на этапе 738. Данные градации могут вводиться вручную оператором или автоматически загружаться из данных сканирования и вводиться в электронную таблицу в компьютере 130. На этапе 740 выдается запрос для определения того, есть ли еще трубная секция 125 для тестирования. Если да, то ветвь «ДА» следует к этапу 708. В противном случае ветвь «НЕТ» следует к этапу КОНЕЦ.
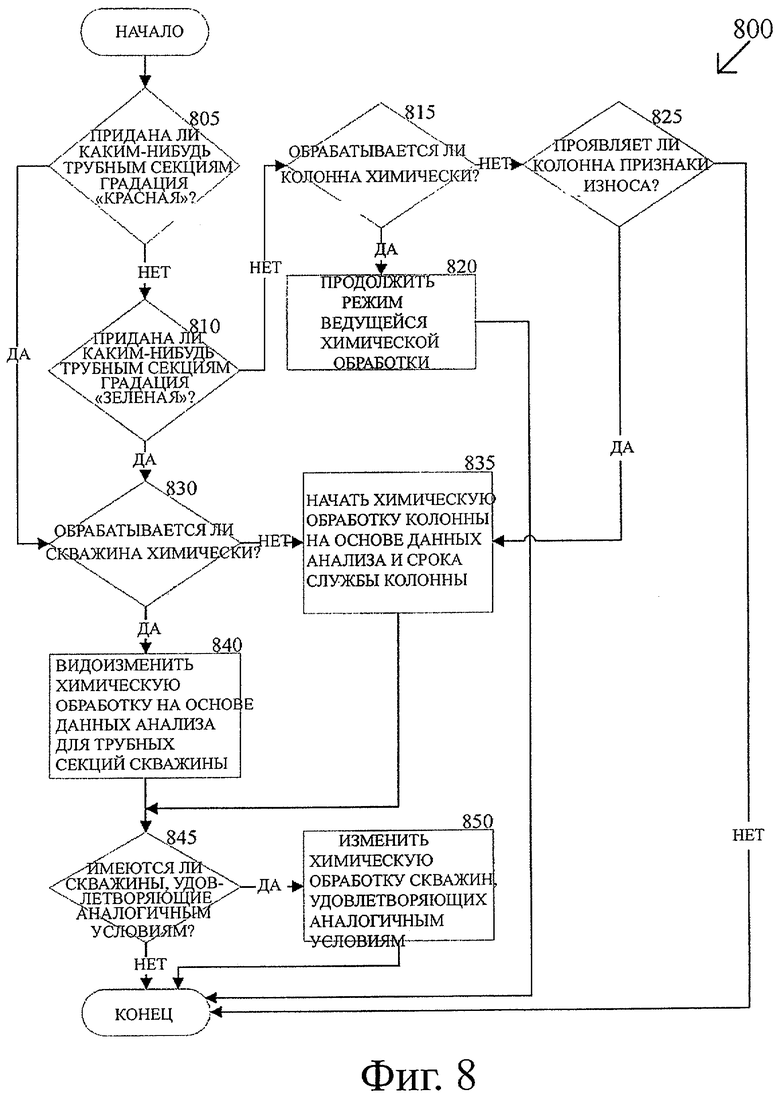
Фиг.8 представляет собой логическую схему алгоритма, представленную для иллюстрации процесса 800 видоизменения химической обработки скважин 175 на основе анализа колонны в типовой рабочей среде ремонтного агрегата 140 и трубного сканера 150 по фиг.1 и 2. Со ссылкой на фиг.1, 2 и 8, примерный способ 800 начинается на этапе НАЧАЛО и переходит к этапу 805, где выдается запрос для определения того, была ли придана какой-либо из трубных секций 125 градация «красная». Если да, то ветвь «ДА» следует к этапу 830. С другой стороны, если ни одна из трубных секций 125 не получила градации «красная», ветвь «НЕТ» следует к этапу 810.
На этапе 810 выдается запрос для определения того, была ли придана какой-либо из трубных секций 125 градация «зеленая». Если да, ветвь «ДА» следует к этапу 830. В противном случае ветвь «НЕТ» следует к этапу 815. На этапе 815 выдается запрос для определения того, обрабатывается ли химически в настоящее время та скважина 175, из которой удалялись трубные секции 125. Если эта скважина 175 обрабатывается химически, ветвь «ДА» следует к этапу 820, где текущая химическая обработка продолжается для этой скважины 175. Процесс переходит к этапу «КОНЕЦ». На этапе 815, если скважина 175 не обрабатывается в настоящее время химически, ветвь «НЕТ» следует к этапу 825.
На этапе 825 выдается запрос для определения того, демонстрируют ли трубные секции 125 в скважине 175 признаки чрезмерного износа. Если да, ветвь «ДА» следует к этапу 835. В противном случае ветвь «НЕТ» следует к этапу «КОНЕЦ». На этапе 830, если какие-либо из трубных секций 125 из скважины 175 получили градацию «красная» или «зеленая», выдается запрос для определения того, обрабатывается ли скважина 175 химически. Если скважина 175 не обрабатывается химически, ветвь «НЕТ» следует к этапу 835, где к скважине 175 применяется режим химической обработки на основе данных анализа для трубной секции 125 и ее срока службы. В противном случае ветвь «ДА» следует к этапу 840, где существующий режим химической обработки видоизменяется на основе данных анализа. Режим обработки можно видоизменять путем изменения типов используемых химикатов, добавления дополнительных химикатов или обработки скважины 175 более или менее часто.
На этапе 845 выдается запрос для определения того, имеются ли какие-либо скважины 175, удовлетворяющие аналогичным требованиям. Скважина 175 может удовлетворять аналогичным требованиям, если она была пробурена в приблизительно то же самое время, что и скважина 175, которую анализировали, если она находится поблизости от скважины 175, которую анализировали, или по иным причинам, известным специалистам в области бурения и эксплуатации нефтяных скважин. Если имеются удовлетворяющие аналогичным требованиям скважины 175, ветвь «ДА» следует к этапу 850, где режимы химической обработки для скважин 175, удовлетворяющих аналогичным требованиям, изменяются для более точного совпадения с изменениями для проанализированной скважины 175. Затем процесс продолжается к этапу КОНЕЦ. Если же скважин, удовлетворяющих аналогичным условиям, нет, ветвь «НЕТ» следует к этапу КОНЕЦ.
Фиг.11 является еще одной примерной логической схемой алгоритма, представленной на иллюстрации процесса 1100 получения информации о колонне 125, которую вводят в нефтяную скважину или извлекают из нее с практически постоянной скоростью в типовой рабочей среде ремонтного агрегата 140 и трубного сканера 150 по фиг.1 и 2. Со ссылкой на фиг.1, 2 и 11, примерный способ 1100 начинается на этапе НАЧАЛО и переходит к этапу 1105, на котором принимается скорость анализа колонны. На этапе 1110 ремонтный агрегат 140 начинает поднимать трубную секцию 125 с практически постоянной скоростью анализа и анализирует трубную секцию 125 аналогично способам, обсуждавшимся на фиг.3-6.
На этапе 1115 выдается запрос для определения того, достигнут ли конец трубной секции 125. Конец сегмента 125 может быть определен визуально оператором ремонтного агрегата 140 или другими на рабочем месте. Помимо этого, к трубному сканеру 150 можно добавить датчики для обнаружения каждого из сочленений, которые удерживают вместе секции колонны 125, и передачи информации к компьютеру 130, который может определить, когда достигнут конец конкретной трубной секции 125. Если конец трубной секции 125 не достигнут, ветвь «НЕТ» следует к этапу 1120, где трубный сканер 150 продолжает анализировать трубную секцию 125. Затем процесс возвращается к этапу 1115. С другой стороны, если конец трубной секции 125 достигнут, ветвь «ДА» следует к этапу 1125, где трубный сканер 150 начинает анализ следующей трубной секции 125, пока первая трубная секция 125 удаляется из стенда буровой колонны.
Трубная секция 125, которую только что анализировали, сортируется на этапе 1130. Сортировка трубопровода, как правило, проводится путем просмотра данных анализа. На этапе 1135 трубную секцию 125 маркируют градацией, выданной на основе просмотра данных анализа компьютером 130 или оператором. На этапе 1140 трубные секции 125 упорядочивают по градации. Данные градации труб вводят в электронную таблицу на этапе 1145. Данные градации могут быть введены вручную оператором или автоматически загружены из данных сканирования и введены в электронную таблицу в компьютере 130. На этапе 1150 выдается запрос для определения того, имеется ли еще трубная секция 125 для тестирования. Если да, ветвь «ДА» следует к этапу 1110. В противном случае ветвь «НЕТ» следует к этапу КОНЕЦ.
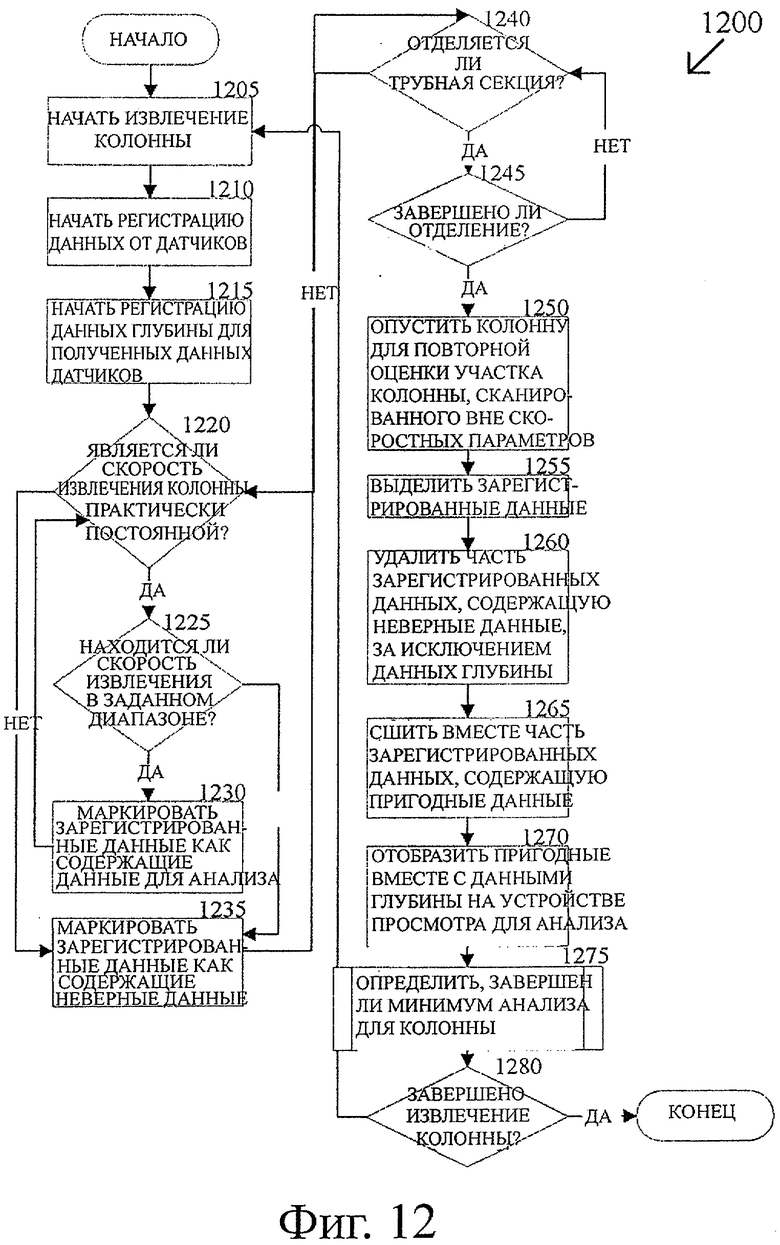
Фиг.12 представляет собой логическую схему алгоритма, иллюстрирующую примерный процесс 1200 получения информации о колонне 125, которую вводят в нефтяную скважину 175 или извлекают из нее, как показано и описано в рабочей среде типового ремонтного агрегата 140 и трубного сканера 150 по фиг.1 и 2. Со ссылкой на фиг.1, 2 и 12 примерный способ 1200 начинается на этапе НАЧАЛО и переходит к этапу 1205, где ремонтный агрегат начинает вынимать колонну 125 из скважины 175. Компьютер 130 начинает регистрировать данные от датчиков в трубном сканере 150 на этапе 1210. В одном примерном варианте осуществления датчики могут включать в себя датчики 205 износа штанги, датчики 255 выкрашивания, датчики массы (не показано), которые также могут располагаться вне трубного сканера 150, и ультразвуковые датчики (не показано).
На этапе 1215 компьютер 130 начинает регистрировать данные глубины, связанные с данными датчиков, полученными на этапе 1210. В одном примерном варианте осуществления данные глубины получают от кодера 115, однако и другие датчики или устройства глубины или положения можно использовать для определения глубины, на которой была колонна 125 во время работы скважины 175. На этапе 1220 выдается запрос для определения того, является ли скорость извлечения трубной секции 125 практически постоянной. Скорость колонны можно определить оцениванием сигнала, посланного от кодера 115 через барабан 110 к компьютеру 130. В одном примерном варианте осуществления компьютер 130 запрограммирован с допусками для скорости колонны, чтобы определять, считается ли диапазон скоростей практически постоянным. Если скорость колонны не является практически постоянной, ветвь «НЕТ» следует к этапу 1235. В противном случае, ветвь «ДА» следует к этапу 1225.
На этапе 1225 выдается запрос для определения того, находится ли скорость извлечения в заданных пределах. В одном примерном варианте осуществления оптимальная скорость извлечения находится между двумя и четырьмя футами в минуту, однако можно использовать и другие скорости выше и ниже этих пределов, а скорости анализа могут зависеть от типа извлекаемой колонны 125 характеристик датчиков, используемых для анализа колонны 125. Если скорость извлечения находится в заданных пределах, ветвь «ДА» следует к этапу 1230, где выделяемые данные анализа маркируются как содержащие данные для анализа. Затем процесс переходит к этапу 1220. С другой стороны, если скорость извлечения не находится в заданных пределах, ветвь «НЕТ» следует к этапу 1235, где данные анализа маркируются как содержащие неверные данные. Маркировку данных можно осуществлять, как описано здесь ранее.
На этапе 1240 выдается запрос для определения того, отделена ли трубная секция 125 от остальной колонны 125 в скважине 175. Если нет, ветвь «НЕТ» следует к этапу 1220. В противном случае ветвь «ДА» следует к этапу 1245. На этапе 1245 выдается запрос для определения того, завершено ли отделение трубной секции 125. Если нет, ветвь «НЕТ» следует к этапу 1240. С другой стороны, если отделение завершено, ветвь «ДА» следует к этапу 1250, где агрегат 140 опускает колонну 125, чтобы повторно оценить участок колонны 125, сканированный вне скоростных параметров, когда агрегат 140 замедлялся для остановки извлечения трубной секции 125. В одном примерном варианте осуществления на основе данных глубины или положения, выдаваемых кодером 115, компьютер 130 может предоставить достаточную информацию, чтобы сообщить оператору нефтепромысловой службы величину для спуска колонны 125. В другом примерном варианте осуществления компьютер 130 может быть соединен для связи с агрегатом 140 известными средствами управления и компьютер 130 может опускать колонну 125 на величину, определенную из анализа неверных данных.
На этапе 1255 компьютер 130 выбирает зарегистрированные данные. Компьютер 130 удаляет часть зарегистрированных данных, содержащую неверные данные, на этапе 1260. Однако на этом этапе данные глубины удерживаются и сохраняются для отображения на просмотровом устройстве. На этапе 1265 компьютер 130 сшивает вместе часть зарегистрированных данных, содержащую верные или пригодные данные. Процесс сшивания аналогичен описанному здесь ранее. Пригодные данные отображаются вместе с данными глубины на просмотровом устройстве для анализа на этапе 1270. На этапе 1275 компьютер 130 определяет, собран ли минимум для анализа колонны 125. На этапе 1280 выдается запрос для определения того, завершено ли извлечение колонны. Если нет, ветвь «НЕТ» следует к этапу 1205 для вытягивания дополнительных трубных секций 125. В противном случае ветвь «ДА» следует к этапу КОНЕЦ.
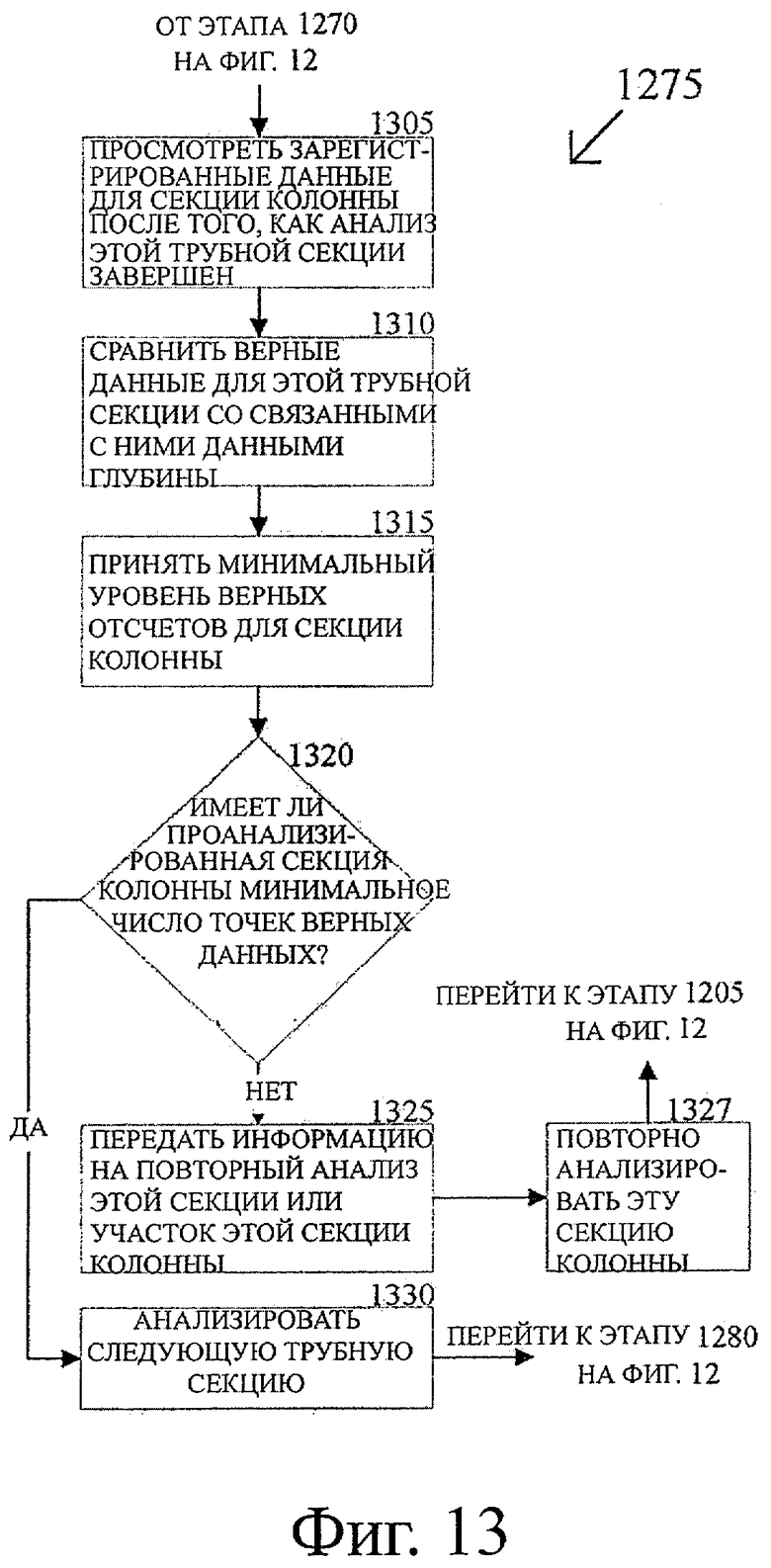
Фиг.13 является логической схемой алгоритма, иллюстрирующей примерный процесс определения того, завершены ли минимальные уровни анализа для колонны, как завершается на этапе 1275 по фиг.12. Со ссылкой на фиг.1, 2, 12 и 13, примерный способ 1275 начинается на этапе 1305, где компьютер 130 просматривает зарегистрированные данные для секции колонны 125 после анализа того, что трубная секция 125 завершена. В данном примерном варианте осуществления трубная секция представляет собой единую деталь колонны, однако величина анализируемой колонны меняется и может программироваться на основе величины колонны 125, вытянутой из скважины 175 во время единственного процесса извлечения. На этапе 1310 компьютер 130 сравнивает пригодные данные для анализируемой трубной секции 125 со связанными с ними данными глубины.
На этапе 1315 компьютер 130 принимает входной сигнал, описывающий минимальный уровень отсчетов пригодных данных, который нужно принять от каждой секции колонны 125. Этот входной сигнал может включать в себя требования, что базовый уровень пригодных отсчетов должен быть получен от трубной секции 125, базовый уровень пригодных отсчетов должен быть получен от участка трубной секции 125 или от обоих. В одном примерном варианте осуществления компьютер 130 запрограммирован на определение того, получен ли по меньшей мере один отсчет пригодных данных от каждой шестнадцатой части длины детали колонны или трубной секции 125. Специалисты поймут, что выбор количества отсчетов и длины трубных секций 125 для выбранного количества отсчетов является переменным и может быть выбран и видоизменен на основе местных факторов для процесса извлечения каждой конкретной колонны 125.
На этапе 1320 выдается запрос для определения того, имеет ли анализируемая секция колонны требуемое число отсчетов пригодных данных. Следуя описанному выше примеру, компьютер 130 будет анализировать данные глубины для трубной секции 125 и может определить на основе расположения по глубине, получен ли по меньшей мере один отсчет пригодных данных для каждой шестнадцатой линейной секции колонны 125. Если этот минимум не достигнут, ветвь «НЕТ» следует к этапу 1325, где компьютер 130 или иное устройство анализа передает информацию на повторный анализ этой секции или участка этой секции колонны 125. Передача может быть в виде либо визуального, либо звукового сигнала на панели управления, сообщения, отображенного на устройстве просмотра или иных способов, известных специалистам. На этапе 1327 трубную секцию 125 анализируют повторно. Затем процесс возвращается к этапу 1205. На этапе 1320, если был получен минимум, ветвь «ДА» следует к этапу 1330, где можно начинать анализ следующей трубной секции. Затем процесс переходит к этапу 1280 по фиг.12.
В итоге примерный вариант осуществления настоящего изобретения описывает способы анализа секции колонны при практически постоянной заранее заданной скорости и отображает данные в таком виде, что сортировка колонны является более легкой и более согласованной с известными способами сортировки. Помимо этого, на основе улучшенной сортировки можно анализировать и пересматривать способ химической обработки скважин, чтобы продлить срок службы колонны в скважинах.
Из вышеприведенного понятно, что вариант осуществления настоящего изобретения преодолевает ограничения прототипа. Специалисты оценят, что настоящее изобретение не ограничено каким-либо конкретно обсуждавшимся применением и что описанные здесь варианты осуществления являются иллюстративными, а не ограничивающими. Из описания этих примерных вариантов осуществления эквиваленты показанных в них элементов предлагаются специалистам, и методы построения других вариантов осуществления настоящего изобретения будут предлагаться практикам. Поэтому объем настоящего изобретения должен ограничиваться только нижеследующей формулой изобретения.
Предложенная группа изобретений относится к анализу технического состояния нефтепромысловой колонны труб или штанг. Техническим результатом является повышение точности оценки технического состояния нефтепромысловых труб или штанг. Способ анализа трубной секции в месте расположения промысла включает в себя следующие этапы: в процессе подъема сканируют трубную секцию, по меньшей мере, одним датчиком, анализируют полученные данные для определения технического состояния трубной секции и осуществляют сортировку трубных секций на основе анализа данных сканирования. При этом на этапе сканирования осуществляют контроль скорости подъема трубной секции и исключают зарегистрированные данные, которые были получены при непостоянной скорости подъема. Данные анализа, полученные при требуемой постоянной скорости, отображаются графически на экране монитора. Данные анализа также могут отображаться различными цветами, в зависимости от степени технического состояния исследуемой колонны. Скорость анализа можно задать заранее или вводить на основе анализируемой колонны и примененных датчиков. Способ анализа технического состояния трубной секции осуществляют с помощью системы, которая включает трубный сканер с множеством датчиков, вычислительное устройство, средство для отображения данных и устройство для маркировки трубных секций. 6 н. и 35 з.п. ф-лы, 14 ил.
1. Способ оценивания, по меньшей мере, одной трубной секции в месте расположения промысла, содержащего скважину, включающий в себя этапы, на которых: поднимают из скважины, по меньшей мере, одну трубную секцию; сканируют эту трубную секцию, по меньшей мере, одним датчиком для получения множества качественных данных для оценивания, по меньшей мере, одного индикатора качества для колонны, когда, по меньшей мере, участок трубной секции поднимают из скважины; получают множество качественных данных; получают скорость, с которой трубную секцию поднимают из скважины; опознают первую часть качественных данных, полученную, когда скорость подъема трубной секции была практически постоянной скоростью; и отображают первую часть качественных данных на отображающем устройстве, при этом отображение первой части качественных данных имеет начальную точку и конечную точку.
2. Способ по п.1, дополнительно содержащий этапы, на которых: опознают вторую часть качественных данных, полученную, когда трубную секцию не перемещали с практически постоянной скоростью; и останавливают отображение качественных данных на дисплее.
3. Способ по п.2, дополнительно содержащий этапы, на которых: опознают другую первую часть качественных данных, полученную, когда трубную секцию перемещали с практически постоянной скоростью вслед за опознанием второй части качественных данных, полученной, когда трубную секцию не перемещали с практически постоянной скоростью; и повторно начинают отображение качественных данных на отображающем устройстве в положении, практически смежном с конечной точкой отображения первой части качественных данных.
4. Способ по п.3, дополнительно содержащий этап, на котором определяют качественную градацию для трубной секции на основе первой части и другой первой части данных, отображенных на отображающем устройстве.
5. Способ по п.4, дополнительно содержащий этап, на котором маркируют трубную секцию качественной градацией.
6. Способ по п.5, дополнительно содержащий этап, на котором упорядочивают трубные секции на основе качественной градации, полученной каждой из трубных секций.
7. Способ по п.4, дополнительно содержащий этап, на котором автоматически вводят качественную градацию для трубной секции в приложение электронной таблицы.
8. Способ по п.2, дополнительно содержащий этап, на котором инициируют предупредительный сигнал о том, что скорость не является практически постоянной.
9. Способ по п.8, в котором предупредительный сигнал содержит звуковую сигнализацию.
10. Способ по п.8, в котором предупредительный сигнал содержит сообщение, отображаемое на отображающем устройстве.
11. Способ по п.1, в котором отображающее устройство расположено на скважинном ремонтном агрегате.
12. Способ по п.1, в котором отображающее устройство расположено в местоположении, удаленном от места расположения скважины, и при этом способ содержит далее этап, на котором посылают первую часть качественных данных на отображающее устройство.
13. Способ по п.12, в котором первую часть качественных данных посылают на отображающее устройство в местоположении, удаленном от места расположения скважины, через Интернет.
14. Способ по п.12, в котором первую часть качественных данных посылают на отображающее устройство в местоположении, удаленном от места расположения скважины, через спутниковую передачу из места расположения скважины.
15. Способ по п.1, дополнительно содержащий этап, на котором: принимают скорость анализа колонны труб; и определяют, перемещалась ли трубная секция с практически постоянной скоростью, причем эта практически постоянная скорость содержит диапазон скоростей, который включает в себя скорость анализа колонны.
16. Способ по п.15, в котором скорость анализа колонны принимают от устройства ввода на скважинном ремонтном агрегате.
17. Способ по п.15, дополнительно содержащий этапы, на которых: определяют расстояние, необходимое для разгона трубной секции до скорости анализа колонны; и размещают верхний конец трубной секции ниже датчиков на, по меньшей мере, расстояние, необходимое для разгона трубной секции до скорости анализа колонны.
18. Способ по п.1, дополнительно содержащий этапы, на которых: опознают вторую часть качественных данных, полученную, когда трубную секцию не перемещали с практически постоянной скоростью; первоначально отображают вторую часть качественных данных на отображающем устройстве, причем отображение качественных данных содержит множество первых частей качественных данных и множество вторых частей качественных данных; определяют, что качественные данные получены для нижнего конца трубной секции; удаляют множество вторых частей качественных данных из отображающего устройства; и по существу сращивают вместе множество первых частей качественных данных на отображении в отображающем устройстве.
19. Способ по п.1, дополнительно содержащий этапы, на которых: опознают вторую часть качественных данных, полученную, когда трубную секцию не перемещали с практически постоянной скоростью; отображают множество качественных данных на отображающем устройстве, причем множество качественных данных содержит первую часть и вторую часть качественных данных; при этом первую часть качественных данных отображают на отображающем устройстве первым цветом, а вторую часть качественных данных отображают на отображающем устройстве вторым цветом.
20. Способ по п.1, в котором датчик содержит одно из следующего: датчик толщины стенок, датчик износа штанги, датчик расположения муфты, датчик трещин, датчик выкрашивания и датчик изображения.
21. Способ оценивания, по меньшей мере, одной трубной секции в месте расположения промысла, содержащего скважину, включающий в себя этапы, на которых: поднимают из скважины, по меньшей мере, одну трубную секцию; сканируют эту трубную секцию, по меньшей мере, одним датчиком для получения множества качественных данных для оценивания, по меньшей мере, одного индикатора качества для колонны, когда, по меньшей мере, участок трубной секции поднимают из скважины; получают множество качественных данных; отображают множество качественных данных на отображающем устройстве; опознают первую часть качественных данных, полученную, когда скорость подъема трубной секции не была практически постоянной скоростью; и удаляют первую часть качественных данных из отображения качественных данных на отображающем устройстве.
22. Способ оценивания, по меньшей мере, одной трубной секции в месте расположения промысла, содержащего скважину, включающий в себя этапы, на которых: поднимают из скважины, по меньшей мере, одну трубную секцию; сканируют эту трубную секцию, по меньшей мере, одним датчиком для получения множества качественных данных для оценивания, по меньшей мере, одного индикатора качества для колонны, когда, по меньшей мере, участок трубной секции поднимают из скважины; получают множество качественных данных; получают множество данных глубины, при этом данные глубины содержат глубину трубной секции в скважине перед тем, как эту трубную секцию поднимают; связывают каждую точку качественных данных с данными глубины; определяют, является ли действительная скорость анализа колонны практически равной желательной скорости анализа колонны для каждых из множества качественных данных; опознают первую часть полученных качественных данных и связанных с ними данных глубины, полученную, когда действительная скорость анализа колонны была практически равна желательной скорости анализа колонны; опознают вторую часть полученных качественных данных и связанных с ними данных глубины, полученную, когда действительная скорость анализа колонны не была практически равна желательной скорости анализа колонны; отображают первую часть качественных данных на связанной с ними глубине на графике, отображенном на отображающем устройстве, при этом график содержит, по меньшей мере, одну ось глубины.
23. Способ по п.22, дополнительно содержащий этап, на котором принимают желательную скорость анализа колонны из устройства ввода на скважинном ремонтном агрегате.
24. Способ по п.22, дополнительно содержащий этап, на котором опускают трубную секцию, содержащую верхний конец и нижний конец такие, что верхний конец расположен ниже, по меньшей мере, одного датчика, выполненного с возможностью генерировать множество качественных данных.
25. Способ по п.22, дополнительно содержащий этап, на котором останавливают отображение качественных данных на дисплее для второй части качественных данных.
26. Способ по п.22, дополнительно содержащий этапы, на которых: опознают другую первую часть качественных данных, полученную, когда трубную секцию перемещали с практически постоянной скоростью вслед за опознанием второй части получаемых качественных данных; повторно начинают отображение качественных данных на отображающем устройстве в положении, практически смежном с конечной точкой отображения первой части качественных данных.
27. Способ по п.22, дополнительно содержащий этапы, на которых отображают вторую часть качественных данных на отображающем устройстве; при этом первую часть качественных данных отображают на отображающем устройстве первым цветом, а вторую часть качественных данных отображают на отображающем устройстве вторым цветом.
28. Способ по п.22, дополнительно содержащий этапы, на которых: первоначально отображают вторую часть качественных данных на отображающем устройстве, где отображение качественных данных содержит множество первых частей качественных данных и множество вторых частей качественных данных; определяют тот факт, что качественные данные получены для нижнего конца трубной секции; удаляют множество вторых частей качественных данных из отображающего устройства; и размещают множество первых частей качественных данных рядом одну с другой на отображении в отображающем устройстве.
29. Способ по п.22, дополнительно содержащий этап, на котором отображают связанные данные глубины для второй части качественных данных без отображения этой второй части качественных данных на отображении в отображающем устройстве.
30. Способ оценивания, по меньшей мере, одной трубной секции в месте расположения промысла, содержащего скважину, включающий в себя этапы, на которых: поднимают из скважины, по меньшей мере, одну трубную секцию; сканируют эту трубную секцию, по меньшей мере, одним датчиком для получения множества качественных данных для оценивания, по меньшей мере, одного индикатора качества для колонны, когда, по меньшей мере, участок трубной секции поднимают из скважины; получают множество качественных данных; получают множество данных глубины, при этом данные глубины содержат глубину трубной секции в скважине перед тем, как эту трубную секцию поднимают; связывают каждую точку качественных данных с данными глубины; создают регистрацию для качественных данных и данных глубины; определяют, находится ли действительная скорость анализа колонны в диапазоне желательных скоростей анализа колонны для каждых из множества качественных данных; опознают первую часть полученных качественных данных и связанных с ними данных глубины, полученную, когда действительная скорость анализа колонны была в диапазоне желательных скоростей анализа колонны; обозначают первую часть качественных данных как содержащую качественные данные, пригодные для анализа; опознают вторую часть полученных качественных данных и связанных с ними данных глубины, полученную, когда действительная скорость анализа колонны не была в диапазоне желательных скоростей анализа колонны; обозначают вторую часть качественных данных как содержащую качественные данные, не пригодные для анализа; выделяют регистрацию качественных данных и данных глубины; отображают первую часть качественных данных и связанных с ними данных глубины на отображающем устройстве; и отображают связанные данные глубины для второй части качественных данных без отображения второй части качественных данных на отображающем устройстве.
31. Способ по п.30, дополнительно содержащий этап, на котором определяют, отображен ли на отображающем устройстве минимальный порог анализа качественных данных.
32. Способ по п.31, в котором этап определения, отображен ли на отображающем устройстве минимальный порог анализа качественных данных, содержит этап, на котором определяют, отображают ли на отображающем устройстве минимальное число точек качественных данных.
33. Способ по п.31, дополнительно содержащий этап, на котором передают сигнал на повторный анализ трубной секции на основе отрицательного определения того, что минимальный порог анализа качественных данных отображен на отображающем устройстве.
34. Способ по п.30, дополнительно содержащий этапы, на которых: опускают, по меньшей мере, участок трубной секции ниже датчика на, по меньшей мере, глубину, где от трубной секции была получена вторая часть качественных данных; и принимают другое множество качественных данных для трубной секции.
35. Способ оценивания, по меньшей мере, одной трубной секции в месте расположения промысла, содержащего скважину, включающий в себя этапы, на которых: поднимают из скважины, по меньшей мере, одну трубную секцию; сканируют эту трубную секцию, по меньшей мере, одним датчиком для получения множества качественных данных для оценивания, по меньшей мере, одного индикатора качества для колонны, когда, по меньшей мере, участок трубной секции поднимают из скважины; получают действительную скорость, с которой поднимают трубную секцию; получают множество качественных данных; определяют, находится ли действительная скорость, с которой поднимают трубную секцию, в диапазоне желательных скоростей анализа колонны для каждых из множества качественных данных; опознают первую часть качественных данных, полученную, когда трубную секцию перемещали с практически постоянной скоростью; и отображают первую часть качественных данных на отображающем устройстве.
36. Способ по п.35, в котором первая часть качественных данных содержит все из качественных данных, полученных для трубной секции, когда действительная скорость, с которой поднимали трубную секцию, была в диапазоне желательных скоростей анализа колонны.
37. Способ по п.35, дополнительно содержащий этап, на котором принимают желательную скорость анализа колонны из устройства ввода.
38. Способ по п.37, в котором диапазон желательных скоростей анализа колонны выделяют из желательной скорости анализа колонны, принятой от устройства ввода, при этом желательная скорость анализа колонны находится в диапазоне желательных скоростей анализа колонны.
39. Способ по п.35, дополнительно содержащий этап, на котором определяют градацию качества для трубной секции на основе первой части качественных данных, отображенной на отображающем устройстве.
40. Система для получения и отображения данных сканирования колонны труб, содержащая: трубный сканер, содержащий множество датчиков для восприятия трубной секции и выдачи данных сканирования; датчик скорости, обеспечивающий индикацию скорости, с которой поднимают трубную секцию; средство для отображения данных сканирования; и вычислительное устройство в электронном соединении с трубным сканером, датчиком скорости и упомянутым средством для отображения данных сканирования; причем вычислительное устройство принимает данные сканирования и отображает эти данные сканирования на средстве для отображения данных сканирования, когда скорость от датчика скорости указывает, что трубную секцию поднимают в диапазоне желательных скоростей.
41. Система по п.40, дополнительно содержащая средство ввода в электронном соединении с вычислительным устройством, причем средство ввода принимает желательную скорость для подъема трубной секции и сообщает эту желательную скорость вычислительному устройству.
| US 20050267686 A1, 01.12.2005 | |||
| Устройство для определения дефектов обсадных колонн | 1978 |
|
SU691559A1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257571C1 |
| US 4363727 A, 13.01.1987 | |||
| WO 03021248 A1, 13.03.2003 | |||
| US 2855564 A, 07.10.1958 | |||
| US 6483302 B1, 19.11.2002. | |||

