ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее техническое решение относится к области контроля технического состояния технологических объектов, а именно к системе и способу сканирования состояния тросовой транспортерной ленты ленточного конвейера.
УРОВЕНЬ ТЕХНИКИ
[0002] Во многих отраслях промышленности, например, таких как горнодобывающая, перерабатывающая, энергетическая, химическая, в сфере перевалки грузов и др. используется конвейерный транспорт для транспортировки сыпучих грузов.
[0003] Транспортировка протяженными магистральными конвейерами может осуществляться на большие расстояния до нескольких десятков километров. Для протяженных конвейеров используется резинотросовая транспортерная (конвейерная) лента, так как она более прочна и имеет меньшее удлинение.
[0004] Конструкция резинотросовой ленты состоит из резинотросового каркаса (слой стальных тросов в адгезионном резиновом слое) и резиновых обкладок (верхняя и нижняя). Стальные троса расположены на одном уровне с определенным шагом. Обычно, шаг расположения тросов находится в диапазоне 10-20 мм (ГОСТ Р 56904-2016 / Ленты конвейерные резинотросовые для горнодобывающей промышленности).
[0005] Для надежной и бесперебойной работы транспортерной ленты ключевыми факторами являются: сохранение целостности тросового каркаса и стыковых соединений. В этой связи возникает необходимость мониторинга состояния тросов и стыковых соединений в ленте.
[0006] В ходе эксплуатации конвейера в тросовом каркасе ленты и стыковых соединениях могут возникать повреждения, вызванные ударным воздействием или заклиниванием тяжелых крупногабаритных кусков руды или инородных материалов в местах загрузки конвейера, попаданием транспортируемого материала между обечайкой барабанов и лентой или в следствии аварийного контакта транспортерной ленты с дефектными или неподвижными частями конвейера. Также троса подвержены усталостному разрушению в результате циклических напряжений изгиба и растяжения при работе на конвейере или могут разрушиться в результате механической и/или химической коррозии из-за трения между отдельными жилами/прядями в стальном тросе или попадания влаги. Стыки могут деградировать и разрушаться так же из-за потери адгезии между тросом и адгезивным слоем резины в стыковом соединении, а также из-за разрушения самих тросов.
[0007] Все вышеуказанные повреждения стальных тросов и стыковых соединений ведут к потере прочностных свойств ленты и риску ее порыва и, как следствие, внеплановым остановкам и простоям конвейерного транспорта и возможно к травмам и даже гибели обслуживающего персонала.
[0008] В этой ситуации возникает необходимость контроля состояния целостности стальных тросов и стыковых соединений для выявления повреждений на ранней стадии их возникновения для осуществления превентивного ремонта в период плановых остановок конвейера. В связи с чем, Федеральной службой по экологическому, технологическому и атомному надзору Приказом от 4 апреля 2008 г. N 206 «Об утверждении и введении в действие Методических рекомендаций о порядке проведения экспертизы промышленной безопасности резинотросовых конвейерных лент, применяемых на опасных производственных объектах» утвержден руководящий документ «Методические рекомендации о порядке проведения экспертизы промышленной безопасности резинотросовых конвейерных лент, применяемых на опасных производственных объектах» (РД-15-16-2008). В соответствии с РД-15-16-2008 рекомендуется периодическая дефектоскопия металлотросов ленты и стыков.
[0009] В силу большой протяженности конвейеров, а также расположения тросов и стыковых соединений внутри ленты под слоем резиновых обкладок крайне затруднительно обнаружить повреждения стальных тросов и деградацию стыковых соединений на ранней стадии их возникновения с помощью визуального осмотра обслуживающим персоналом.
[0010] В этой связи возникает необходимость в поиске инструментальных методов неразрушающего контроля (НК), который бы позволял инспектировать троса и стыковые соединения онлайн в процессе эксплуатации транспортерной ленты.
[0011] На настоящий момент инспекция тросов и стыковых соединений в ленте производится визуально или с помощью средств НК. К наиболее распространенному средству НК относится инспекция с помощью вихретоковой дефектоскопии. Примером такого дефектоскопа, в основу работы которого положен вихретоковый вид НК является ИНТРОКОН https://www.intron.ru/ru/pribory/introkon/.
[0012] Основным недостатком визуальной инспекции является то, что при визуальной инспекции невозможно обнаружить скрытые дефекты и повреждения/разрушения стальных тросов и стыковых соединений на ранней стадии, в связи с чем данный способ крайне неэффективен.
[0013] Недостатком вихретоковой дефектоскопии с использованием ИНТРОКОН является, то, что магнитная дефектограмма, представленная в виде графика кривых электромагнитного отклика сложночитаема и интерпретируема, сами повреждения плохо визуализированы на дефектограмме, повреждения не имеют точной поперечной координаты (идет анализ по дискретным каналам шириной по 220 мм), что снижает эффективность последующей интерпретации информации, точность расположения и детализацию повреждений. Необходим специально обученный специалист для чтения и интерпретации магнитограмм, представленных в виде графика кривых. Стыковые соединения плохочитаемы и не визуализированы на дефектограмме, нет возможности проанализировать внутреннюю структуру стыкового соединения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0014] Заявленное изобретение направлено на решение технической проблемы в части создания более эффективного метода для контроля целостности тросов в каркасе ленты и состояния стыковых соединений тросовой транспортерной ленты.
[0015] Техническим результатом является повышение эффективности контроля состояния транспортерной ленты.
[0016] Заявленный технический результат достигается за счет системы сканирования состояния тросовой транспортерной ленты ленточного конвейера, при этом система содержит:
по меньшей мере один магнит, расположенный поперек транспортерной ленты и обеспечивающий намагничивание тросов транспортерной ленты;
по меньшей мере один многоканальный сканер, содержащий группу сенсоров магнитного поля (СМП) и обеспечивающий сканирование транспортерной ленты для получения магнитограмм, отображающих сигналы от магнитного поля рассеяния (МПР) в области стыковых соединений и повреждений тросов;
вычислительный блок, принимающий сигналы со сканера и выполняющий:
а) обработку получаемых магнитограмм для определения размера повреждения тросов и/или состояния стыковых соединений в транспортерной ленте, при этом состояние стыковых соединений характеризуется по меньшей мере их длинной;
b) определение продольных и/или поперечных координат повреждений тросов и/или продольных координат расположения стыковых соединений;
c) передачу данных обработки магнитограмм, полученных на этапе а) и b) на внешнее устройство.
[0017] В одном из частных примеров реализации системы сканер располагается на расстоянии от поверхности ленты не более 1000 мм.
[0018] В другом частном примере реализации системы группа СМП расположена в один ряд или по меньшей мере в два ряда.
[0019] В другом частном примере реализации системы ряды СМП располагаются в шахматном порядке.
[0020] В другом частном примере реализации системы СМП регистрируют по меньшей мере одну компоненту МПР, выбираемую из группы: продольная Вх, поперечная By или перпендикулярная Bz.
[0021] В другом частном примере реализации системы СМП представляют собой датчики Холла.
[0022] В другом частном примере реализации системы сканер содержит концентраторы магнитного потока, которые обеспечивают пассивное магнитное усиление и увеличение выходной чувствительности СМП без увеличения его собственных электрических шумов.
[0023] В другом частном примере реализации системы концентраторы выполняются интегрированными в СМП.
[0024] В другом частном примере реализации системы концентраторы магнитного потока выполняются стержневыми или плоскими.
[0025] В другом частном примере реализации поперечная координата по ширине ленты отсчитывается от борта или центра транспортерной ленты.
[0026] В другом частном примере реализации системы над сканером устанавливается экран, обеспечивающий защиту от сторонних магнитных полей.
[0027] В другом частном примере реализации системы магнит является постоянным магнитом или электромагнитом.
[0028] В другом частном примере реализации системы магнит располагается на расстоянии от поверхности ленты не более 1000 мм.
[0029] В другом частном примере реализации системы магнитная ось магнита перпендикулярна поверхности ленты.
[0030] В другом частном примере реализации системы сканер располагается после магнита по ходу транспортерной ленты.
[0031] В другом частном примере реализации система дополнительно содержит счетчик метража ленты, который формирует сигналы, передаваемые в вычислительный блок, характеризующие продольный метраж транспортерной ленты.
[0032] В другом частном примере реализации системы счетчик метража ленты представляет собой бесконтактный тахометр или проксиметр, установленный на барабане или ролике конвейера, или энкодер с колесом, контактирующим с движущейся лентой.
[0033] В другом частном примере реализации системы счетчик метража ленты интегрирован в сканер или магнит.
[0034] В другом частном примере реализации системы внешнее устройство подключено к вычислительному блоку посредством проводного или беспроводного канала передачи данных.
[0035] В другом частном примере реализации системы внешнее устройство представляет собой монитор, или интерактивный экран, или компьютер, или ноутбук, или планшет, или смартфон, или съемный носитель данных или ПЛК управления конвейером, или удаленную систему управления.
[0036] В другом частном примере реализации системы вычислительный блок формирует отчет в цифровом виде с данными о повреждении тросов и данными о состоянии стыковых соединений в транспортерной ленте.
[0037] В другом частном примере реализации система содержит по меньшей мере одну видеокамеру, фиксирующую видеоизображение поверхности транспортерной ленты, при этом видеоизображение синхронизировано с магнитограммой.
[0038] В другом частном примере реализации системы размер повреждения тросов характеризуется количеством оборванных тросов в обнаруженном повреждении.
[0039] В другом частном примере реализации системы вычислительный блок дополнительно определяет по меньшей мере один из следующих параметров: порядковый номер стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности полюсных линий ступени в стыковом соединении, площадь полюсных линий ступени стыкового соединения, расстояние между разными полюсными линиями ступени стыкового соединения.
[0040] В другом частном примере реализации системы вычислительный блок выполнен с возможностью отсечения сигналов, регистрируемых СМП, уровень которых менее порогового значения для отсечения фона Пфон.
[0041] В другом частном примере реализации системы, при определении размеров повреждения тросов и состояния стыковых соединений с помощью вычислительного блока, используется сравнение получаемых магнитограмм по меньшей мере с одним пороговым значением сигнала Птрос, установленного для анализа тросов, и по меньшей мере с одним пороговым значением сигнала Пстык для анализа стыковых соединений, при этом Пстык≥Птрос≥Пфон.
[0042] В другом частном примере реализации системы вычислительный блок осуществляет определение площади повреждения тросов и площади полюсных линий ступени В стыковых соединениях на основании пороговых значений Птрос и Пстык для СМП.
[0043] В другом частном примере реализации системы вычислительный блок использует пороговый уровень площади Sтрос для определения повреждений тросов и пороговый уровень площади Sстык для определения полюсных линий ступени в стыковом соединении и самих стыковых соединений из них состоящих, при этом Sстык больше Sтрос.
[0044] В другом частном примере реализации системы факт регистрации полюсных линий ступени в стыковом соединении и самого стыкового соединения, состоящего из них, на магнитограмме устанавливается вычислительным блоком при обработке получаемых сигналов от сканера в случае равенства или превышения сигналом порогового значения Пстык и равенства или превышения площади магнитной аномалии, определенной на основании Пстык, величины Sстык.
[0045] В другом частном примере реализации системы факт регистрации повреждения тросов на магнитограмме устанавливается вычислительным блоком при обработке получаемых сигналов от сканера в случае выполнения следующих условий: равенство или превышение сигналом порогового значения Птрос и равенство или превышение площади магнитной аномалии, определенной на основании Птрос, величины Sтрос при условии, что данная магнитная аномалия не зарегистрирована как полюсная линия ступени стыкового соединения.
[0046] В другом частном примере реализации системы пороговый уровень сигнала Птрос для СМП определяется с помощью калибровки на калибровочных образцах ленты с заданными повреждениями или принимается равным Пфон, или устанавливается вычислительным блоком автоматически с использованием метода аналитической калибровки.
[0047] В другом частном примере реализации системы установка порогового значения Птрос происходит автоматически для каждого повреждения тросов на уровне, соответствующем определенной процентной доли от максимального значения сигнала от данного повреждения тросов.
[0048] В другом частном примере реализации системы процентная доля максимального значения сигнала от повреждения тросов для установки порогового значения Птрос определяется автоматически, исходя из параметров расположения сканера на конвейере и параметров конструкции транспортерной ленты.
[0049] В другом частном примере реализации системы установка порогового значения Птрос происходит автоматически дифференцировано для нескольких классов повреждений.
[0050] В другом частном примере реализации системы вычислительный блок производит магнитное картирование всей навески транспортерной ленты на ленточном конвейере с определением полной длины ленты, изображением всех стыковых соединений и повреждений тросов на ленте с указанием продольной координаты вдоль ленты.
[0051] В другом частном примере реализации системы первым стыковым соединением на магнитной карте ленты указывается ведущее или замыкающее стыковое соединение участка ленты с заданным порядковым номером ранжирования участков по длине, где первый участок имеет наименьшую длину, а последующие участки - большую длину относительно предыдущего, при этом стыковое соединение участка ленты с заданным порядковым номером, расположенное первым по ходу ленты является ведущим, а второе замыкающим или первое стыковое соединение задается вручную.
[0052] В другом частном примере реализации системы продольная координата стыковых соединений и повреждений тросов отсчитывается от первого стыкового соединения или от точки на ленте, расположенной на заданном расстоянии от первого стыкового соединения.
[0053] В другом частном примере реализации системы продольная координата повреждений тросов ленты отсчитывается от ведущего и/или замыкающего стыкового соединения участка ленты, где находится повреждение или от точки на ленте, расположенной на заданном расстоянии от ведущего и/или замыкающего стыкового соединения данного участка ленты.
[0054] В другом частном примере реализации системы продольная координата стыковых соединений и повреждений тросов ленты отсчитывается от визуальной, магнитной, или радиочастотной метки, дополнительно установленной на транспортерной ленте.
[0055] В другом частном примере реализации системы вычислительный блок подключен к системе управления ленточным конвейером.
[0056] В другом частном примере реализации системы вычислительный блок подключен к системе управления ленточным конвейером одним из следующих способов: через релейные выходы, по протоколу Modbus или сетям Profibus, или Profinet.
[0057] В другом частном примере реализации системы вычислительный блок выполнен с возможностью формирования сигнала для системы управления ленточным конвейером на остановку ленточного конвейера при превышении заданного уровня повреждения тросов, характеризующегося по меньшей мере одним параметром выбираемым из группы: размер повреждения, измеряемый количеством оборванных тросов или их процентной долей от общего количества тросов в ленте; общее количество оборванных тросов от всех зафиксированных повреждений на участке ленты заданной длины или их процентная доля от общего количества тросов в ленте.
[0058] В другом частном примере реализации системы вычислительный блок выполнен с возможностью формирования сигнала для системы управления ленточным конвейером на остановку ленточного конвейера при заданном изменении значения параметра состояния стыкового соединения относительно заданного порогового значения по меньшей мере одним параметром выбираемым из группы: длина стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности линий ступени в стыковом соединении, расстояние между разными полюсными линиями ступени стыкового соединения, площадь полюсных линий ступени стыкового соединения, площадь стыкового соединения.
[0059] В другом частном примере реализации системы площадь стыкового соединения определяется, как суммарная площадь всех полюсных линий ступени в стыковом соединении, или характеризуется двумя величинами, каждая из которых является суммарной площадью полюсных линий ступени одной полярности, или разницей или иной комбинацией этих двух величин, или как площадь, заключенная между крайними полюсными линиями ступени стыкового соединения.
[0060] В другом частном примере реализации системы вычислительный блок, подключенный к системе управления ленточным конвейером, выполнен с возможностью формирования сигнала для остановки ленточного конвейера таким образом, чтобы обеспечить выгон участка ленты с повреждением тросов или стыковое соединение на заранее заданном расстоянии от сканера.
[0061] В другом частном примере реализации система вычислительный блок интегрирован в сканер.
[0062] Заявленный технический результат достигается также с помощью способа сканирования состояния тросовой транспортерной ленты ленточного конвейера, при этом способ содержит этапы, на которых:
выполняют намагничивание тросов транспортерной ленты с помощью по меньшей мере одного магнита, расположенного поперек транспортерной ленты;
выполняют сканирование транспортерной ленты по меньшей мере одним многоканальным сканером, содержащим группу сенсоров магнитного поля (СМП), при этом в ходе сканирования получают магнитограммы, отображающие сигналы от магнитного поля рассеяния (МПР) в области стыковых соединений и повреждений тросов;
принимают сигналы, формируемые сканером, в вычислительном блоке, который обеспечивает
a) обработку получаемых магнитограмм для определения размера повреждения тросов и/или состояния стыковых соединений в транспортерной ленте, при этом состояние стыковых соединений характеризуется по меньшей мере их длинной;
b) определение продольных и/или поперечных координат повреждений тросов и/или продольных координат расположения стыковых соединений;
c) передачу данных обработки магнитограмм, полученных на этапе а) и b) на внешнее устройство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0063] Фиг. 1 иллюстрирует общий вид заявленной системы.
[0064] Фиг. 2 иллюстрирует схематичный вид сканера.
[0065] Фиг. 3 иллюстрирует пример регистрации МПР в области нарушения целостности (разрыва) стального троса.
[0066] Фиг. 4А иллюстрирует пример измерения компонент магнитного поля в области порыва троса.
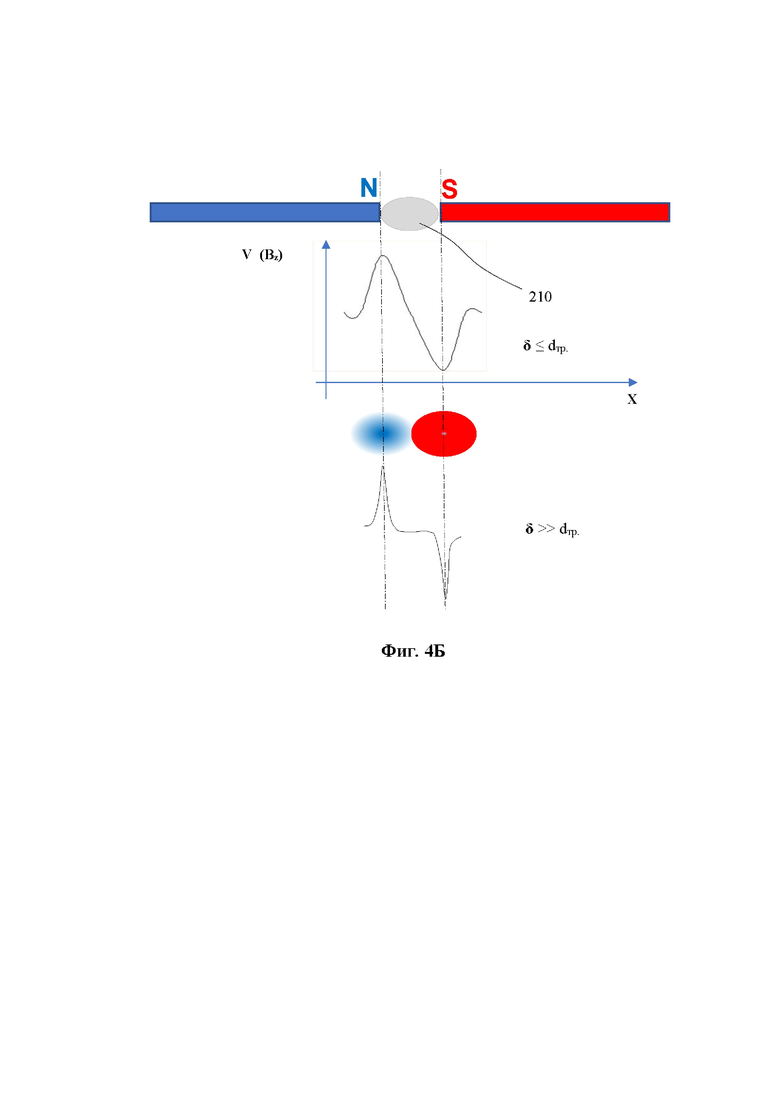
[0067] Фиг. 4Б иллюстрирует пример биполярного сигнала от сенсора магнитного поля в области разрыва троса при регистрации перпендикулярной компоненты Bz МПР.
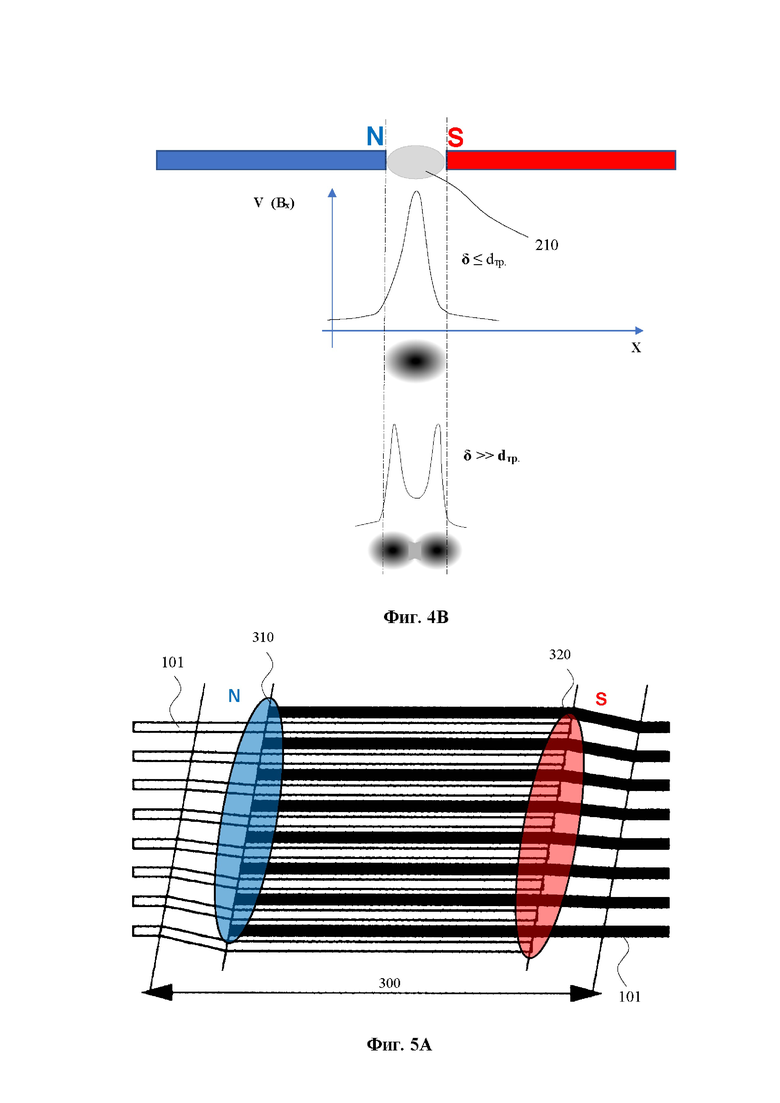
[0068] Фиг. 4 В иллюстрирует пример сигнала от сенсора магнитного поля в области разрыва троса при регистрации продольной компоненты Вх МПР.
[0069] Фиг. 5А иллюстрирует пример формирования полюсных линий ступени в 1 (одно)-ступенчатом стыковом соединении.
[0070] Фиг. 5Б иллюстрирует схематичный вид стыковых соединений разной ступенчатости.
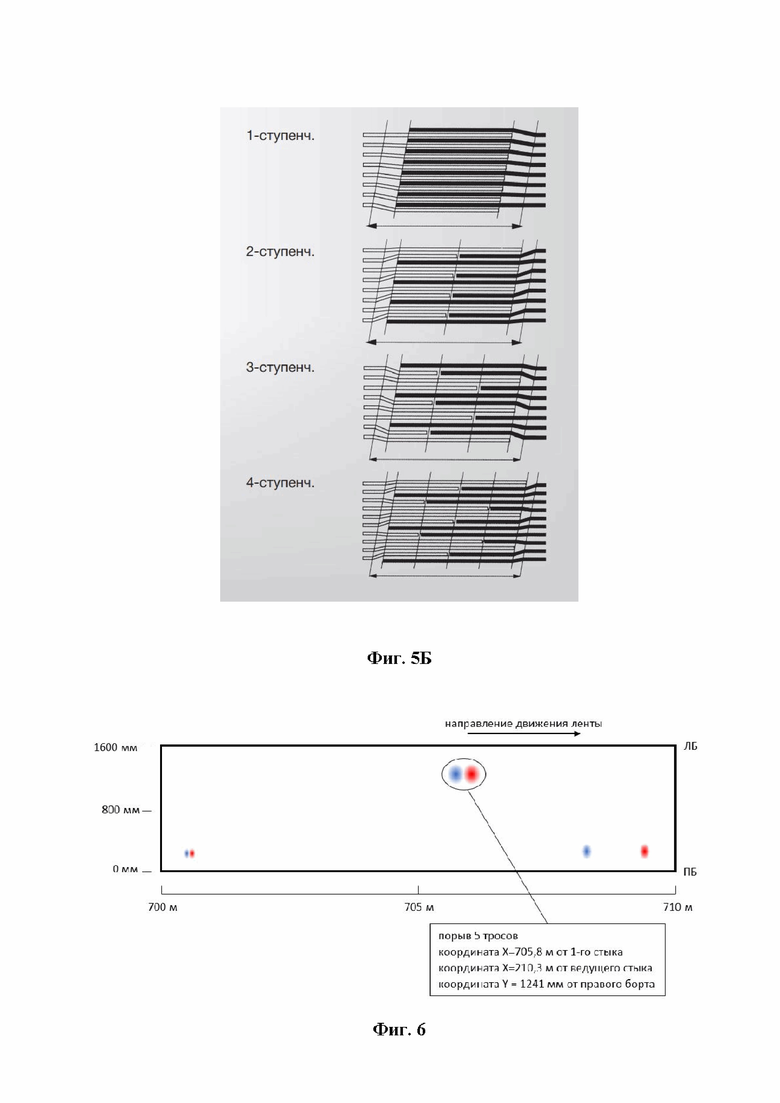
[0071] Фиг. 6 иллюстрирует пример отображения повреждения тросов.
[0072] Фиг. 7 иллюстрирует пример отображения стыкового соединения.
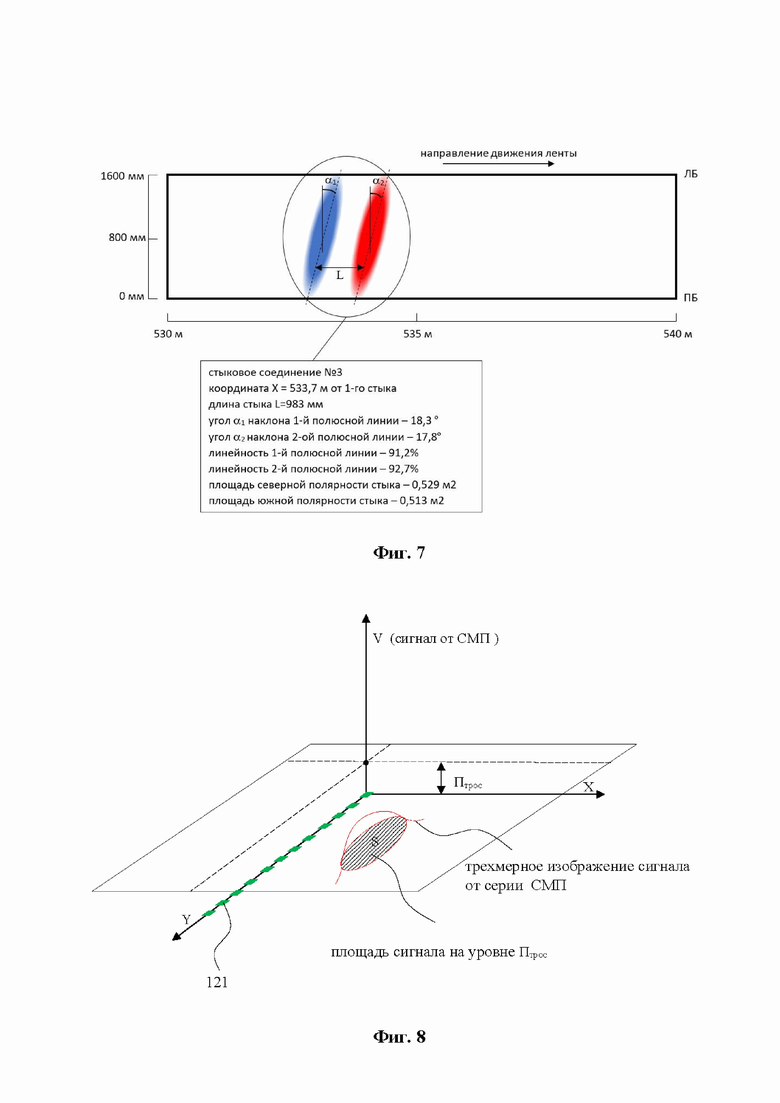
[0073] Фиг. 8 иллюстрирует определение площади магнитной аномалии на основании порогового значения сигнала.
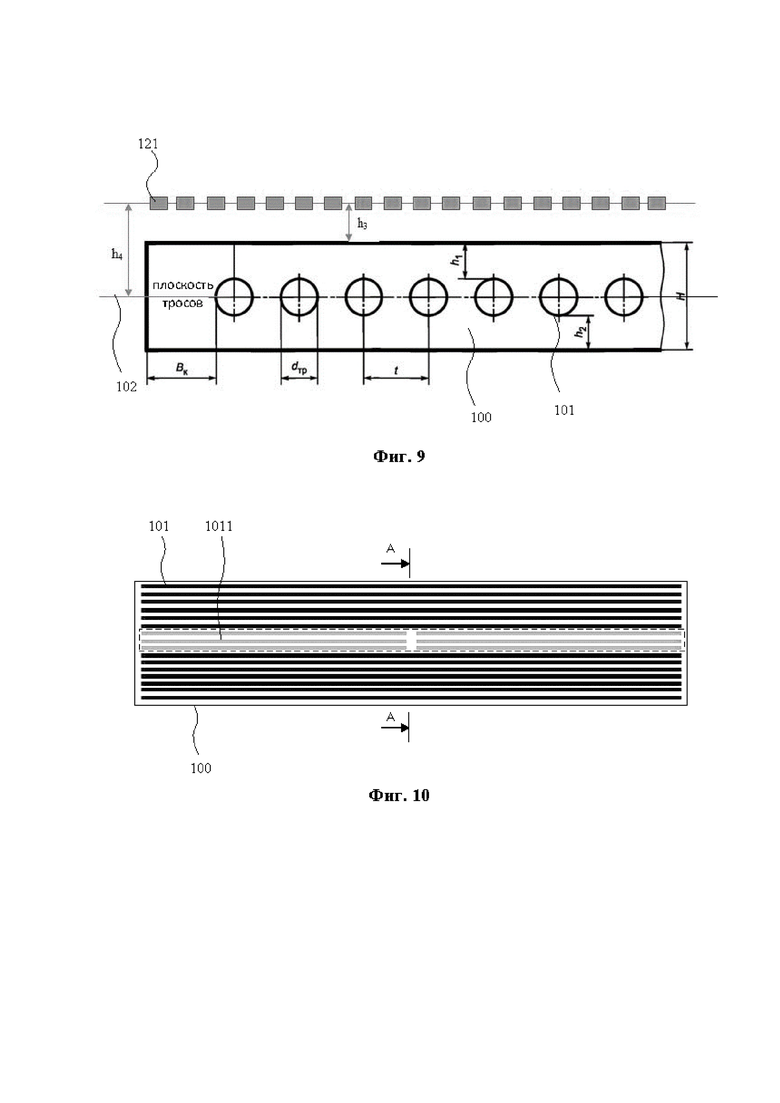
[0074] Фиг. 9 иллюстрирует пример определения расстояния от сенсоров магнитного поля до поверхности ленты и плоскости тросов.
[0075] Фиг. 10 иллюстрирует пример оборванных тросов в повреждении и линию в поперечном сечении А-А, вдоль которой рассчитывается распределение сигнала методом математического моделирования.
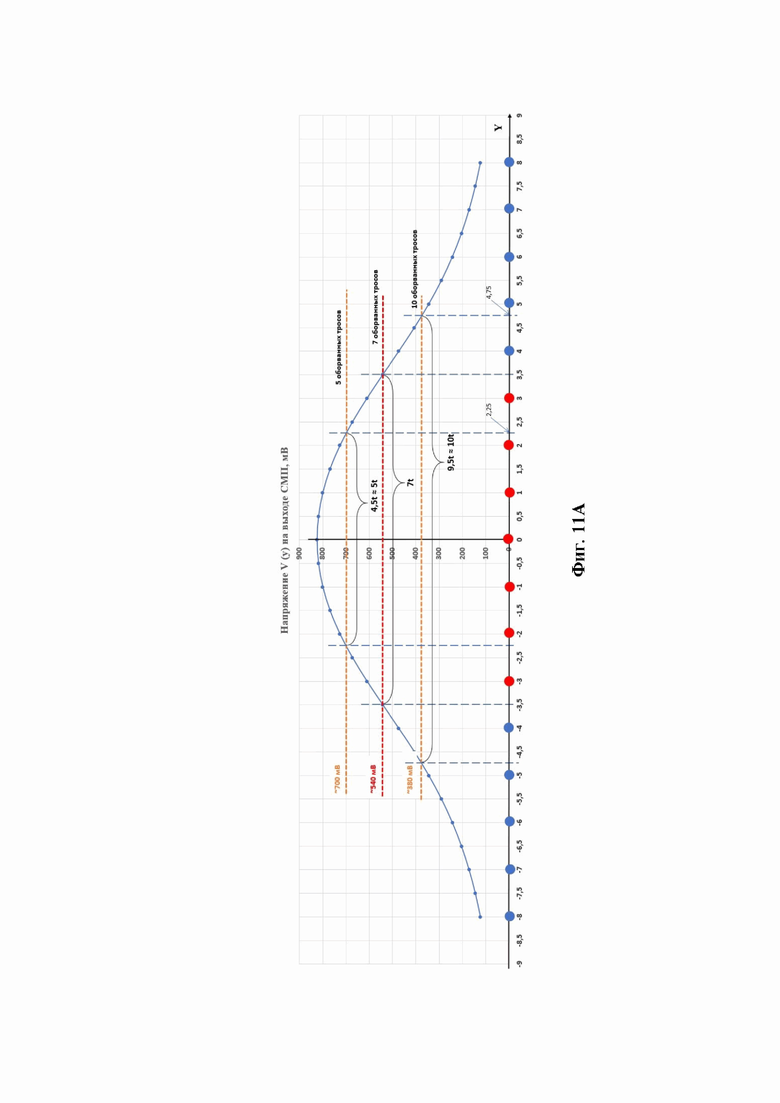
[0076] Фиг. 11А иллюстрирует пример модельного расчета сигналов от сенсоров магнитного поля в области семи оборванных тросов и разных пороговых уровней для сигналов от сенсоров магнитного поля.
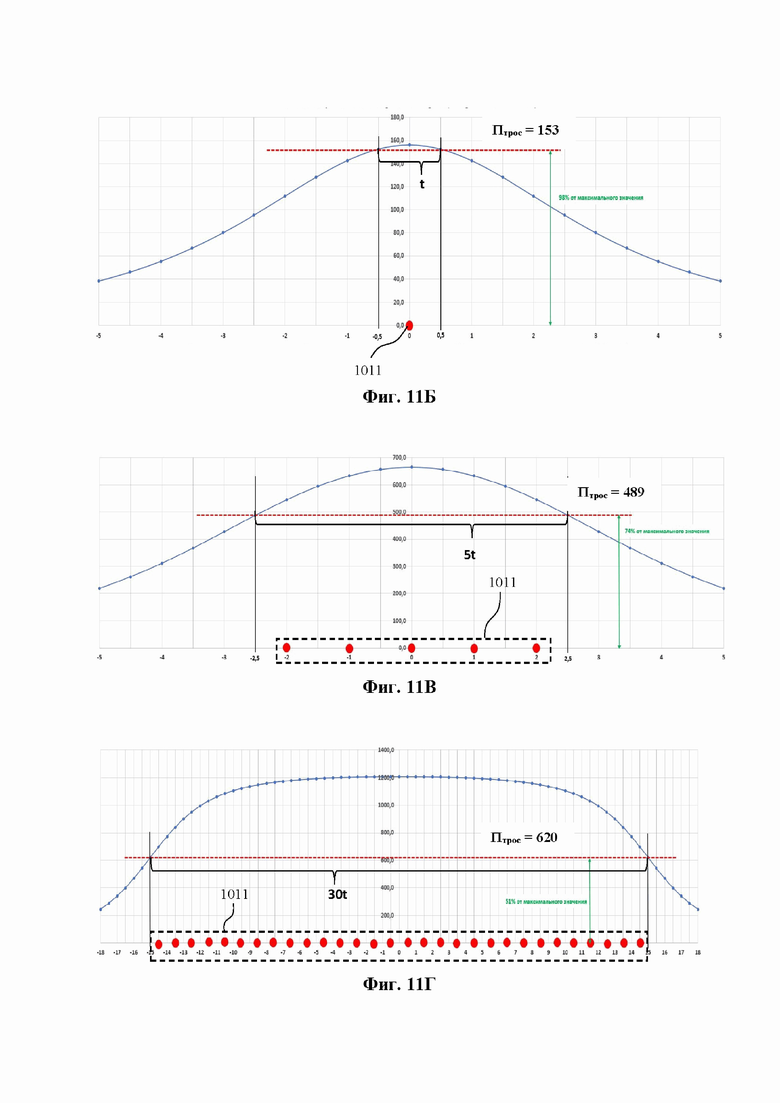
[0077] Фиг. 11Б - Фиг. 11Г иллюстрируют пример модельного расчета сигналов от сенсоров магнитного поля в области повреждения с разным количеством оборванных тросов и подбор оптимального порогового значения для определения количества оборванных тросов.
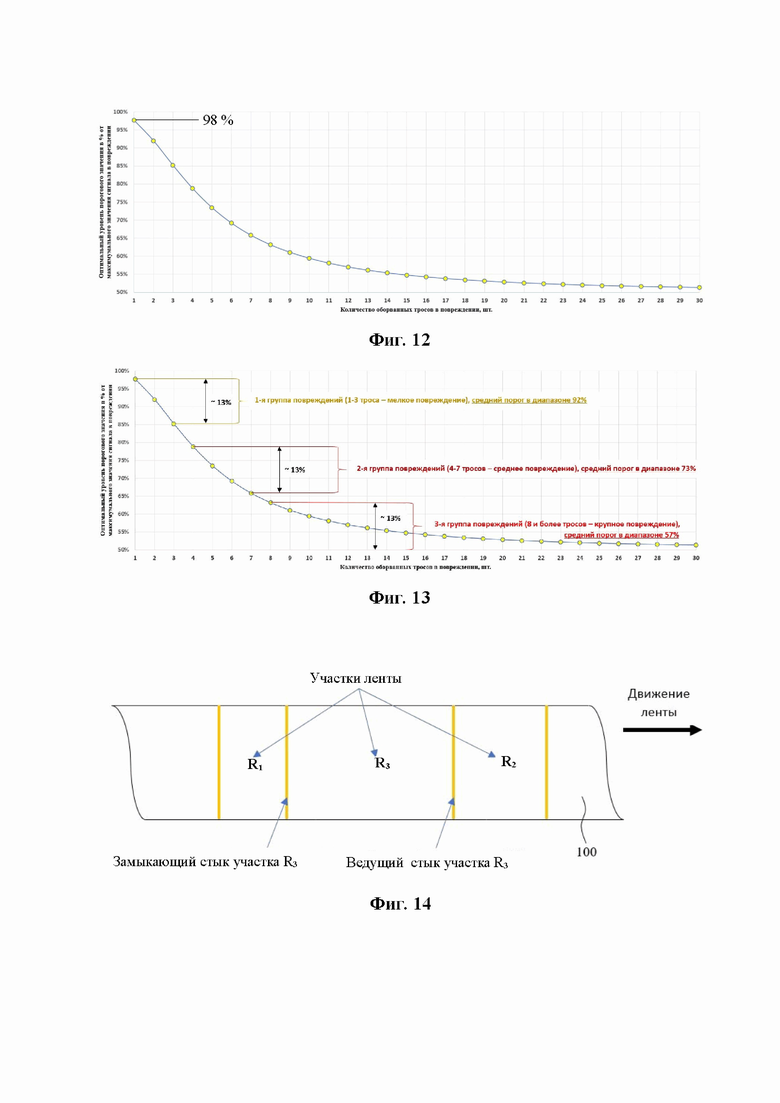
[0078] Фиг. 12 иллюстрирует расчет оптимального процентного уровня порогового значения сигнала Птрос в зависимости от количества оборванных тросов в повреждении.
[0079] Фиг. 13 иллюстрирует пример распределения повреждений по группам в зависимости от количества оборванных тросов в повреждении.
[0080] Фиг. 14 иллюстрирует пример расположения стыков на магнитограмме ленты.
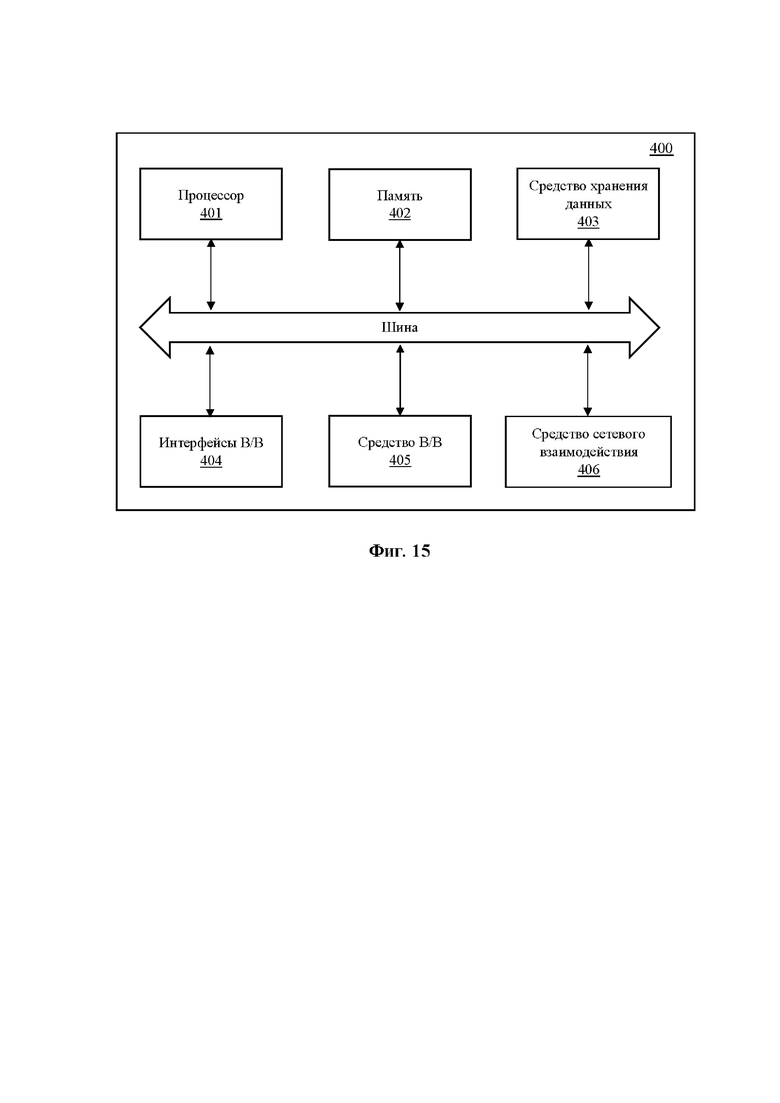
[0081] Фиг. 15 иллюстрирует общий вид вычислительного устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
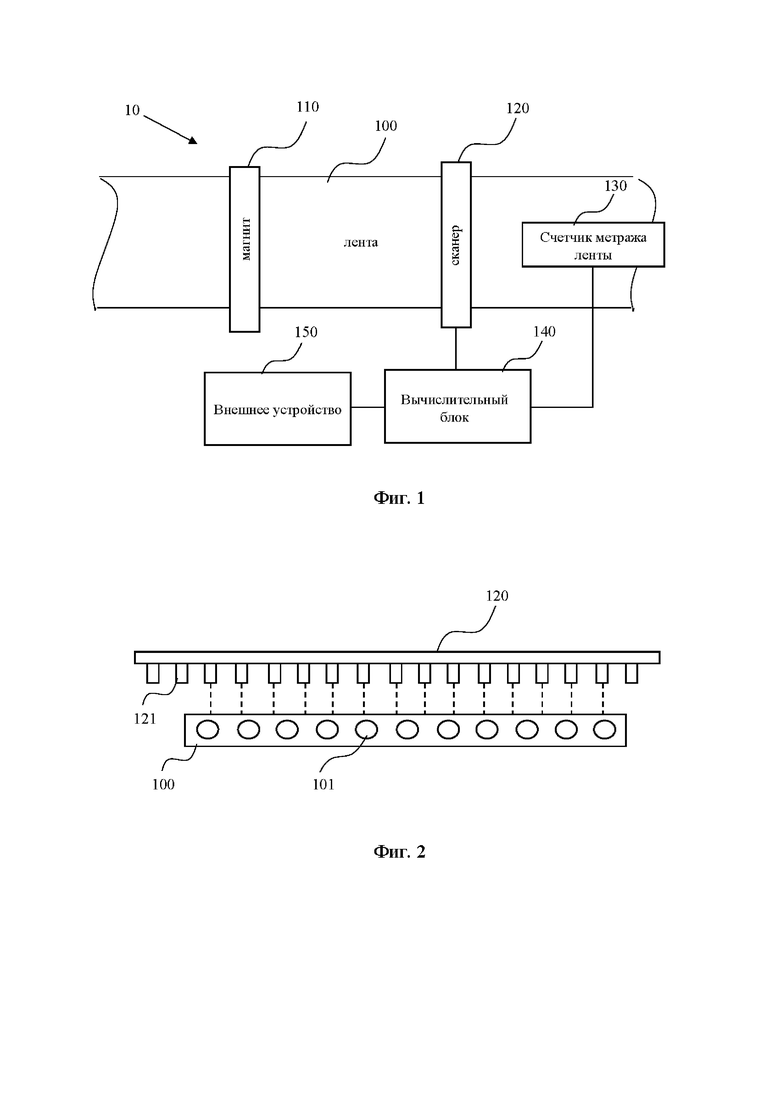
[0082] На Фиг. 1 представлена заявленная система (10) сканирования состояния тросовой ленты (100), которая в общем случае содержит магнит (ПО), сканер (120), вычислительный блок (140) и внешнее устройство (150), связанное с ним. Дополнительно может применяться счетчик метража ленты (130), работа которого будет описана далее в настоящем описании. Данные от сканера (120) и счетчика метража ленты (130), в случае его использования, поступают для их последующей обработки в вычислительный блок (140). [0083] На Фиг. 2 представлен схематичный вид сканера (120). Сканер (120) содержит группу сенсоров магнитного поля (121) (СМП) и устанавливается над или под поверхностью ленты (100). В качестве сенсоров (121) могут применяться, например, датчики Холла. СМП (121) регистрируют магнитные поля рассеяния (МПР), формируемые поврежденными стальными тросами (101) ленты (100), которые намагничиваются с помощью магнита (110), который является постоянным магнитом или электромагнитом. Магнит (110) размещается на расстоянии h3 от поверхности конвейерной ленты, при этом h3 предпочтительно не превышает 1000 мм. Лента (100) может находиться в плоском, лоткообразном или трубчатом состоянии. Предпочтительно размещать магнит (110) таким образом, чтобы добиться одинаковой намагниченности всех тросов по ширине ленты (100), в частности на одном расстоянии от поверхности ленты (100). Для усиления магнитного поля в ленте (100) может использоваться второй магнит с той же или противоположной стороны ленты (100).
[0084] Сканер (120) выдает сигналы от СМП (121), которые передаются в вычислительный блок (140) для формирования магнитограммы и последующего ее анализа, и представляет собой панель, выполненную в виде печатной платы в корпусе, содержащей интегральную схему, к которой подключаются СМП (121). Подключение сканера (120), равно как и счетчика метража ленты (130), к вычислительному блоку (140) может осуществляться с помощью стандартных интерфейсов, например, USB, мультикабельный шлейф, коаксиальный кабель, штырьковый разъем DB25 или другой тип пригодного интерфейса.
[0085] В случае повреждения троса (101) в этом месте происходит рассеяние магнитного поля, которое регистрируется серией СМП (121), расположенных поперек ленты (100) с определенным шагом. Сканер (120) может содержать один или несколько рядов СМП (121), которые могут располагаться различным образом, например, в шахматном порядке, друг за другом, с заданным смещением и т.п., при этом увеличение поперечной разрешающей способности сканера и точности определения расположения повреждений достигается уменьшением шага (дискретизации) расположения СМП (121) друг относительно друга. Шаг расположения СМП (121) ограничен их физическими размерами, которые составляют, как правило, около 3 мм.
[0086] Сканер (120) размещается на расстоянии от поверхности транспортерной ленты (100), как правило, не более 1000 мм.
[0087] Во избежание возникновения наводок (теней) от крупных повреждений и стыковых соединений от тех участков ленты, которые не находятся непосредственно в процессе сканирования, а проходят по другой ветви конвейера и удаленно создают помехи на работающий сканер (120), может применяться установка защитного экранирующего листа, например из стали, закрывающего сканер (120) от области возможного источника возникновения магнитных помех.
[0088] Как показано на Фиг. 3 в каждой точке контроля повреждения тросов (101) используется как минимум один СМП (121), который позволяет осуществлять регистрацию, как минимум, одной из трех проекций напряженности вектора магнитного поля рассеяния, а именно: по длине ленты (продольная проекция) Вх, по ширине ленты (поперечная проекция) By или перпендикулярно поверхности ленты (перпендикулярная проекция) Bz.
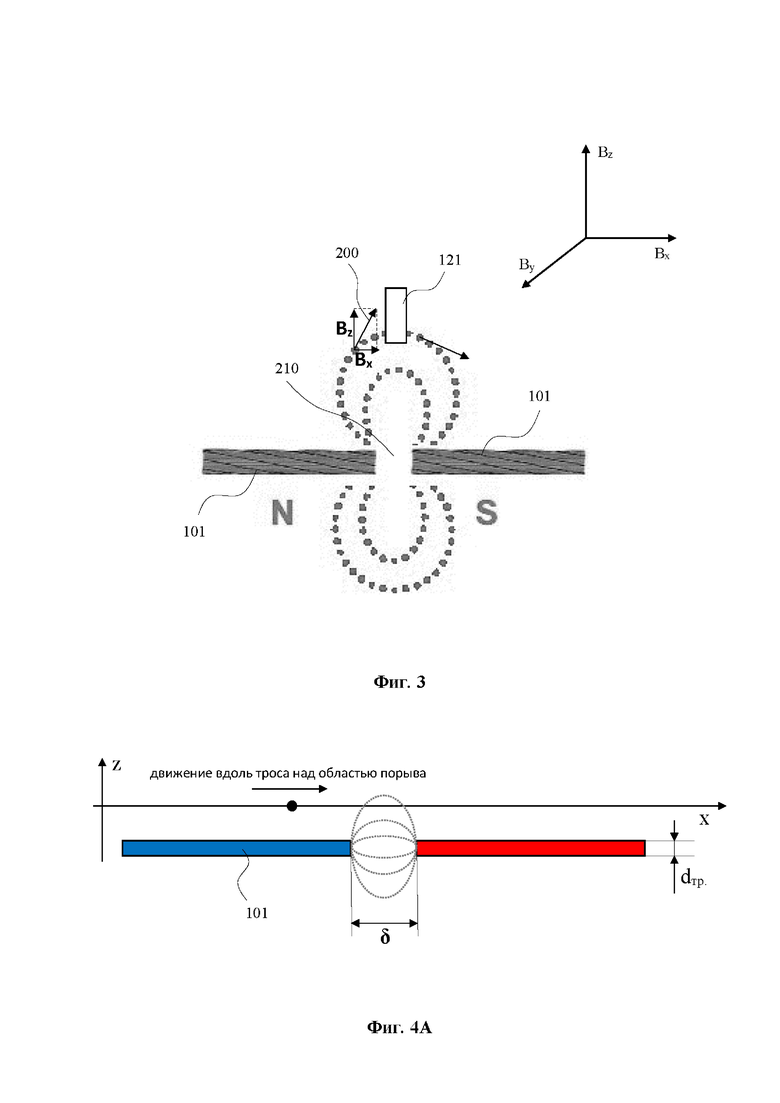
[0089] Как показано на Фиг. 4А, двигаясь над поверхностью конвейерной ленты (100) вдоль поврежденного троса строго над областью его порыва продольная и вертикальная компоненты магнитного поля рассеяния Вх и Bz достигают максимальных/минимальных значений и имеют четко выраженную характерную картину распределения в области повреждения. В тоже время поперечная компонента магнитного поля рассеяния By не имеет характерной картины распределения и находится в области нулевых значений при движении вдоль вышеуказанной линии. В этой связи By не вполне удобна для определения и анализа повреждений стальных тросов (101). Наиболее целесообразно регистрировать продольную Вх или вертикальную (перпендикулярную) Bz компоненты магнитного поля.
[0090] Для выявления области повреждений (210) достаточно как минимум регистрировать перпендикулярную (вертикальную) Bz или продольную Вх составляющую (проекцию) магнитного поля (200). Например, аналоговый отклик СМП (121) при регистрации вертикальной проекции магнитного поля представляет собой биполярный электрический сигнал, как показано на Фиг. 4Б.
[0091] Максимум и минимум биполярного сигнала при регистрации вертикальной проекции МПР соответствует полюсам магнитного поля на противоположных концах троса (101) в месте разрыва (210), точка смены полярности сигнала соответствует центру повреждения. Цифровая обработка биполярного сигнала с помощью вычислительного блока (140) позволяет выделить области повышенной интенсивности магнитного поля и смены полярности сигнала, соответствующие разным полюсам на противоположных концах оборванного троса и центру места разрыва троса (101) для визуализации места повреждения (210).
[0092] Как показано на Фиг. 4В, в случае, если зазор δ между концами порванного троса незначительный (противоположные концы троса могут соприкасаться или находиться на расстоянии сравнимом с диаметром троса δ≤dтр.), то формируется один характерный максимум распределения компоненты Вх, находящийся над центром повреждения, если же повреждение имеет большую протяженность (расстояние между концами тросов много больше диаметра троса δ>>dтр.), то один максимум над центром повреждения расщепляется на два характерных максимума распределения компоненты Вх смещенных от центра порыва ближе к концам оборванного троса с ослаблением в середине повреждения. Как показано на Фиг. 4Б, при измерении вертикальной составляющей Bz в обеих случаях δ≤dтр. и δ>>dтр. картина распределения вертикальной составляющей поля имеет схожий биполярный симметричный вид относительно центра повреждения с максимумом и минимумом на краях повреждения и сменой полярности в центре повреждения, с той лишь разницей, что при δ>>dтр. биполярный отклик от СМП (121) по сути расщепляется на два однополярных сигнала противоположной полярности (ситуация характерная для полюсных линий ступени стыкового соединения).
[0093] Вертикальная составляющая магнитного поля рассеяния Bz имеет наибольший вклад в части эффективной работы заявленного решения, так как вне зависимости от размера повреждения ее распределение всегда имеет биполярную форму со сменой полярности в центре повреждения и экстремальными значениями на краях повреждения, что позволяет четко идентифицировать месторасположение и границы повреждения.
[0094] На Фиг. 5А представлен пример формирования полюсных линий ступени (310, 320) в области 1-ступенчатого стыкового соединения (300), которые соответствуют северному (310) и южному (320) магнитным полюсам при измерении вертикальной составляющей Вz МПР. Поскольку в области стыкового соединения (300) троса (101) имеют открытые концы, в стыковых соединениях (300) происходит аналогичное разрывам тросов (101) рассеяние магнитного поля и формирование противоположных полюсов (N, S) на концах тросов (101).
[0095] Стыковое соединение может быть многоступенчатым, т.е. иметь две, три и более ступеней, схематическое изображение стыковых соединений разной ступенчатости показаны на Фиг. 5Б. На каждой ступени стыкового соединения будут формироваться полюсные линии, аналогичные тем, что показаны на Фиг. 5А. На магнитограмме ленты стыковое соединение изображается в виде череды полюсных линий его составляющих. Расположение и форма полюсных линий ступени, например, их линейность, угол наклона, площадь, расстояние друг от друга, являются важным показателем состояния стыкового соединения ленты (100), которые необходимо оперативно контролировать в процессе ее эксплуатации. Таким образом, в области стыкового соединения (300) формируются полюсные линии (310, 320), которые могут быть зарегистрированы как области повышенной интенсивности магнитного поля и визуализированы при последующей цифровой обработке сигналов.
[0096] МПР, возникшее в результате повреждений тросов (101) или в области стыковых соединений (300), создает на выходе СМП (121) электрический аналоговый сигнал, который далее усиливается, коммутируется (мультиплексируются) при необходимости и преобразуется в цифровую форму с помощью АЦП в сканере (120), и далее поступает на обработку в процессор вычислительного блока (140). В частном случае реализации решения каждая из перечисленных операций: усиление сигналов от СМП (121), коммутация (мультиплексирование) сигналов от СМП, если используется и преобразование аналоговых сигналов от СМП в цифровую форму с помощью АЦП может выполняться непосредственно либо в сканере (120), либо в вычислительном блоке (140) в зависимости от технического способа реализации. Вычислительный блок (140) при этом может являться составной частью сканера (120), или соединяться с ним, формируя единое устройство. Представленный пример аппаратной реализации не ограничивает возможные вариации комбинации устройств и их функционала в рамках заявленного решения.
[0097] Продольная координата «х» вдоль магнитограммы транспортерной ленты (100) может рассчитываться алгоритмически (за счет программной обработки) с помощью вычислительного блока (140), например, исходя из заданной скорости транспортерной ленты (100) или скорости получаемой от датчика скорости транспортерной ленты (100) и времени сканирования. Скорость ленты (100), как правило, является установленным параметром, и, умножая заданную скорость ленты на время сканирования, возможно рассчитать метраж ленты или конкретного участка. Также, данные о скорости ленты можно получать, например, от датчика скорости ленты. Умножая данные о скорости на время, можно получить данные метража ленты.
[0098] При использовании счетчика метража ленты (130), в вычислительный блок (140) поступают импульсы от счетчика метража лент (130), который может выполняться в виде бесконтактного тахометра или проксиметра, установленного на барабане или ролике конвейера, или энкодера с колесом, которое крутится от контакта с движущейся лентой (100). Счетчик метража ленты (130) может быть выполнен на основе датчика скорости ленты. Может применяться также любой другой пригодный тип счетчика метража ленты. При этом счетчик (130) может быть встроенным (интегрированным) в магнит (ПО) или сканер (120). Счетчик метража ленты (130) позволяет более точно определить продольный метраж вдоль транспортерной ленты (измерительная шкала по оси X).
[0099] Полученный поток данных с СМП от сканера (120) и данные со счетчика метража ленты (130), в случае его использования, обрабатывается вычислительным блоком (140). С помощью обработки данных от сканера (120) формируются магнитограммы сканируемой ленты (100) для последующей генерации отчета, содержащего информацию о повреждениях тросов (101) и состоянии стыковых соединениях (300). Отчет о проведенном сканировании может быть передан на внешнее устройство для его просмотра и визуализации, например, монитор, компьютер, ноутбук и т.п., и/или в виде отчета в цифровом виде (цифровой файл), например документ PDF (или иной формат), который может сохраняться на внешнем устройстве (150), выполненном в виде съемного носителя данных (например, USB-флеш накопитель, съемный HDD/SSD диск и т.п.).
[0100] Отчет о сканировании может представлять визуализированные изображения повреждений (Фиг. 6) и стыковых соединений (Фиг. 7), отображающих области повышенной интенсивности магнитного поля на образовавшихся полюсах, с указанием продольных координат вдоль ленты (100) для стыковых соединений и координат по ширине и вдоль ленты (100) для мест повреждения тросов, а также с указанием количества оборванных тросов (101) в повреждении.
[0101] Дополнительно в системе может использоваться одна или несколько видеокамер, позволяющих получать видеоизображения состояния поверхности транспортерной ленты, которые также могут передаваться в вычислительный блок (140) для сопоставления (синхронизации видеоизображения) с магнитограммой соответствующего участка ленты с целью получения дополнительной информации о повреждении тросов и стыковых соединений в данном месте ленты. В последующем это позволяет получить информацию о повреждении как на основании магнитограмм, так и соответствующее видеоизображение ленты, отображающее область повреждения или стыкового соединения, что может отображаться с помощью графического интерфейса пользователя (GUI) и позволять оператору выделять области ленты (100) для последующего анализа.
[0102] Отчет о проведенном сканировании может быть передан на внешнее устройство (150), например, монитор, интерактивный экран, ноутбук, смартфон, планшет или компьютер, содержащий монитор или дисплей для его просмотра и визуализации. Устройство (150) позволяет отображать отчет о состоянии ленты (100) в GUI, в котором также могут производиться манипуляции с визуализированными данными для последующего контроля технического состояния ленты (100). Передача данных на устройство (150) от вычислительного блока (140) может происходить с помощью известных методов связи как проводного (LAN, USB, LPT и т.п.), так и беспроводного типа (TCP/IP, WLAN, Wi-Fi, GSM и т.п.).
[0103] В качестве вычислительного блока (140) может применяться любое пригодное решение, способное выполнять программно-логическую обработку поступающих сигналов от сканера (120) и счетчика метража ленты (130), в случае его использования. Например, в качестве блока (140) может применять система на кристалле (SoC), программно-аппаратный вычислительный модуль, процессор, контроллер, микропроцессор, микроконтроллер, ПЛК, компьютер, в том числе одноплатный, планшет и т.п.
[0104] Для повышения чувствительности измерений МПР в области обрыва стальных тросов (210) и стыковых соединений (300) транспортерной ленты (100) предлагается вместе с СМП (121) использовать ферромагнитные концентраторы магнитного потока, которые обеспечивают пассивное магнитное усиление и увеличение выходной чувствительности СМП без увеличения его собственных электрических шумов. Концентраторы могут выполняться интегрированными в СМП (121) или устанавливаться на плате сканера (120) с заданным удалением от СМП (121) или с обеспечением контакта с СМП (121). Концентраторы могут быть стержневыми или плоскими.
[0105] В уровне техники известны различные примеры выполнения магнитных концентраторов (см, например, SU 1757364 А1). Эффект концентрации магнитного поля основан на увеличении плотности магнитного потока внутри ферромагнетика (внешнее магнитное поле как бы «втягивается» внутрь ферромагнетика), обладающего более высокой магнитной проницаемостью в сравнении с окружающей средой (μ>>1) (Hall Effect Devices, Second Edition, R.S. Popovic, Swiss Federal Institute of Technology Lausanne (EPFL), Institute of Physics Publishing, Bristol and Philadelphia, 2004), СМП может использоваться с концентраторами в виде длинных прямоугольных, осесимметричных или иных стержней с конусообразным концом, с закруглением или концом иной формы (Hall Effect Devices, Second Edition, R.S. Popovic, Swiss Federal, Institute of Technology Lausanne (EPFL), Institute of Physics Publishing, Bristol and Philadelphia, 2004; Репозиторий Белорусского Национального Технического Университета (БИТУ), Приборы и методы измерения, 1 (6), 2013, SU 1757364 А1, Параметры миниатюрного Элемента Холла с концентраторами магнитного потока как четырехполюсника. Ярмолович В.А. НПЦ НАН Беларуси по материаловедению, г. Минск, Республика Беларусь).
[0106] Магнитное усиление концентратора GM определяется соотношением GM=В*/В, где В* - индукция магнитного поля в месте расположения СМП, В - магнитная индукция внешнего магнитного поля. Оценка магнитного усиления GM достигаемого плоским концентратором определяется соотношением: GM ~ L/t при магнитной проницаемости концентратора μ>>1, L (длина концентратора)>>t (толщина концентратора), W (ширина концентратора)>>t и g/t→0, где g - величина зазора между концами концентратора, где размещается СМП. Результат 2-х мерного математического моделирования для случая L=33t, g=t и W>>t показывает, что применение плоского концентратора магнитного поля позволяет усилить магнитное поле до 10 раз (Hall Effect Devices, Second Edition, R.S. Popovic, Swiss Federal, Institute of Technology Lausanne (EPFL), Institute of Physics Publishing, Bristol and Philadelphia, 2004).
[0107] Также можно использовать плоские концентраторы магнитного поля, которые преобразовывают магнитное поле параллельное поверхности СМП в усиленное перпендикулярное поле, которое регистрируется СМП (121). Два СМП располагаются под плоским концентратором с краю каждого из противоположных концов концентратора. Так как в данной схеме два СМП измеряют перпендикулярную составляющую магнитного поля в противоположных направлениях, то если их значения вычитать, происходит фактическое их сложение. Если такие два датчика работают в паре, то они фактически удваивают чувствительность измерения и, кроме того, не чувствительны к стороннему магнитному полю перпендикулярному поверхности датчиков. Схема расположения СМП с такими концентраторами приведена в работе Hall Effect Devices, Second Edition, R.S. Popovic, Swiss Federal, Institute of Technology Lausanne (EPFL), Institute of Physics Publishing, Bristol and Philadelphia, 2004.
[0108] Максимальное значение магнитного усиления GM достигается, когда СМП прилегают непосредственно к концентратору и расположены на самом краю концентратора, тогда при g≈t и L>>t получаем магнитное усиление GM~L/t.
[0109] При работе с плоскими концентраторами магнитного поля, когда СМП располагаются под краем концентратора, два СМП всегда работают в паре, чтобы такая парная система была не чувствительна к компоненте внешнего магнитного поля, перпендикулярной поверхности СМП и для двойного усиления измеряемого сигнала от компоненты внешнего магнитного поля, параллельной поверхности СМП.
[0110] В качестве материала концентраторов могут использоваться магнитомягкие материалы. Значение усиления магнитного потока стержневым концентратором, вид материала концентратора и геометрические размеры приведены в таблице 1 ниже (Репозиторий Белорусского Национального Технического Университета (БИТУ), Приборы и методы измерения, 1 (6), 2013, Параметры миниатюрного Элемента Холла с концентраторами магнитного потока как четырехполюсника. Ярмолович В.А. НПЦ НАН Беларуси по материаловедению, г. Минск, Республика Беларусь).
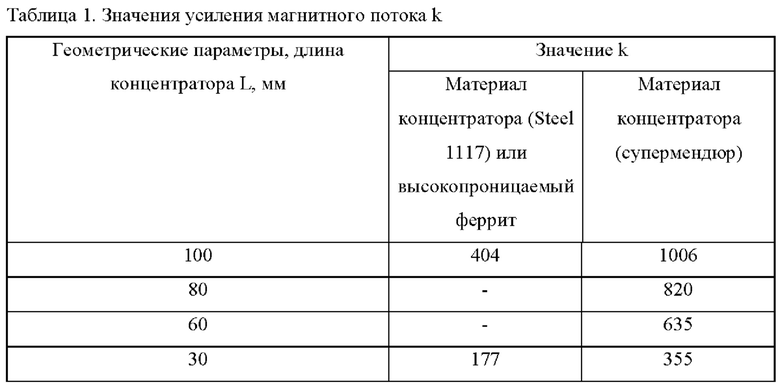

[0111] Применение магнитных концентраторов позволяет достичь усиление магнитного потока и существенно повысить магнитную чувствительность СМП.
[0112] Определение повреждения тросов
[0113] На основании полученных данных с СМП (121) от сканера (120) и счетчика метража ленты (130), в случае его использования, вычислительным блоком (140) формируется магнитограмма ленты и для повреждения тросов (101) определяются следующие характеристики: продольная и поперечная координата повреждения (х, у) и количество оборванных тросов в повреждении. Координата «х» повреждения определяется вдоль ленты (100), от первого стыкового соединения (300), которое может, например, определяться, как стыковое соединение, которое предшествует или за которым следует самый короткий отрезок состыкованной ленты или от любого другого стыкового соединения или от места на ленте, расположенном на заданном расстоянии от выбранного стыкового соединения или от визуальной, магнитной, радиочастотной (RFID, NFC и т.п.) или иного типа метки, дополнительно установленной на транспортерной ленте. Также, дополнительная координата «х» повреждения может отсчитываться от ведущего и/или замыкающего стыкового соединения участка ленты, где находится повреждение или от места на ленте, расположенном на заданном расстоянии от выбранного стыкового соединения. Лента (100) на конвейере состыкована в бесконечное кольцо из отдельных кусков (участков) ленты, поэтому каждый участок ленты имеет два стыковых соединения на его концах, стыковое соединение являющееся первым по ходу ленты называется ведущим, а второе стыковое соединение по ходу ленты - замыкающим.
[0114] Повреждение фиксируется системой СМП (121) в области, где величина сигнала от СМП (121) равна или выше определенного заданного порогового уровня Птрос, а площадь магнитной аномалии, определенная на уровне Птрос, равна или превышает величину Sтрос при условии, что данная магнитная аномалия не зарегистрирована как полюсная линия ступени стыкового соединения. Схематичное определение площади магнитной аномалии на основании порогового значения Птрос показана на Фиг. 8. Площадь магнитной аномалии от обрыва тросов и Sтрос может определяться, например, количеством пикселей на магнитограмме. Продольная координата «х» повреждения может определяться, например, при измерении перпендикулярной составляющей магнитного поля рассеяния, как центр биполярного сигнала (точка смены полярности сигнала), или как место по середине между максимумом и минимумом биполярного сигнала от СМП (121), при том, что максимум и минимум биполярного сигнала расположены друг от друга на расстоянии не более заданного, или как место максимального значения для каждого из однополярных сигналов от СМП (121), полученных в результате расщепления биполярного сигнала из-за большой удаленности противоположных концов оборванного троса или иным аналитическим способом обработки сигналов от СМП (121), например с использованием вейвлет-преобразований.
[0115] Поперечная координата «у» повреждения фиксируется, например, по каналу того СМП (121), величина сигнала которого максимальна или определяется, как координата, соответствующая максимуму кривой, полученной аппроксимацией или интерполяцией уровней сигнала от каналов СМП при регистрации МПР от повреждения и отсчитывается от правого или левого борта ленты, или ее центра, с учетом расположения сканера относительно ленты.
[0116] Количество оборванных тросов в повреждении может определяется исходя их поперечной ширины сигнала на уровне заданного порога Птрос (область, где уровень сигнала выше определенного заданного порогового значения Птрос) и заданного шага тросов в ленте. Например, деление ширины сигнала на шаг тросов дает расчетное количество оборванных тросов в повреждении или иными словами, ширина сигнала, измеренная в единицах шага тросов равна количеству оборванных тросов в повреждении. В зависимости от величины порогового уровня Птрос будет зависеть ширина сигнала и соответственно расчетное количество оборванных тросов в повреждении. Расчетное количество оборванных тросов в повреждении может отличаться от фактического. Для того, чтобы расчетное значение оборванных тросов максимально совпадало с фактическим необходима калибровка порогового значения сигнала на контрольных образцах ленты с определенным количеством оборванных тросов или с помощью аналитической (расчетной) калибровки, которая будет описана далее в материалах заявки.
[0117] Стыковые соединения
[0118] Для стыков (300) по данным от сканера (120) и счетчика метража ленты (130), в случае его использования, вычислительный блок (140) измеряет продольную координату «х» и по меньшей мере один из следующих параметров стыкового соединения: порядковый номер стыкового соединения, длина стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности полюсных линий ступени в стыковом соединении, расстояние между разными полюсными линиями ступени стыкового соединения, площадь стыкового соединения или другие характеристики. Длина стыка очень важный параметр, так как, например, чрезмерное удлинение стыкового соединения в процессе эксплуатации свидетельствует о его деградации и разрушении, что может привести к потере его прочностных характеристик и, как следствие, порыву ленты в области стыка. Так же нарушение линейности, изменение угла наклона, расстояния между отдельными полюсными линиями ступени и площади полюсных линий ступени стыкового соединения свидетельствует о нарушении и/или разрушении первичной структуры стыкового соединения, созданного во время проведения работ по стыковке транспортерной ленты, и может так же свидетельствовать о разрушении стыка и возникновении аварийной ситуации.
[0119] Продольная координата «х» стыкового соединения (300) отсчитывается от первого стыкового соединения (300), которое, например, может определяться как стыковое соединение, которое предшествует или за которым следует самый короткий отрезок состыкованной ленты или от любого другого стыкового соединения или от места на ленте, расположенном на заданном расстоянии от выбранного стыкового соединения или от визуальной, магнитной, радиочастотной (RFID, NFC и т.п.) или иного типа метки, дополнительно установленной на транспортерной ленте. Продольная координата «х» расположения стыкового соединения вдоль ленты, может определяться, например, как координата «х» геометрического центра всех полюсных линий ступени (областей северного (310) и южного полюсов (320)) данного стыка или иным аналитическим способом.
[0120] Длина стыкового соединения может определяться, например, как расстояние между крайними полюсными линиями ступени. Линейность и угол наклона полюсных линий ступени определяется с помощью компьютерной обработкой пиксельного массива полюсных линий ступени. Площадь стыкового соединения может определяться, как суммарная площадь всех полюсных линий ступени в стыковом соединении, или характеризоваться двумя величинами, каждая из которых является суммарной площадью полюсных линий ступени одной полярности, или разницей или иной комбинацией этих двух величин, или как площадь, заключенная между крайними полюсными линиями ступени стыкового соединения. Площадь полюсных линий ступени может определяться как пиксельная площадь на магнитограмме или как метрическая площадь, исходя из продольной и поперечной шкал координат на магнитограмме. Все расчеты выполняются автоматически с помощью алгоритма работы вычислительного блока (140).
[0121] Аналитическая (расчетная) калибровка
Для определения размера повреждения тросов (количество оборванных тросов) необходимо выбрать подходящий пороговый уровень сигнала Птрос. Величина сигнала от СМП (121) зависит от расстояния 1)4 их расположения от плоскости тросов (102), как это показано на Фиг. 9.
[0122] С помощью метода математического моделирования можно получить, например, распределение уровня сигнала от продольной составляющей Вх магнитного поля рассеяния от оборванных тросов (1011) поперек ленты (100) по линии сечения А-А (ось Y) над оборванными тросами (1011) по центру обрыва как показано на Фиг. 10 на расстоянии h4 от плоскости тросов. Величина магнитного поля в каждой точке есть сумма магнитных полей от каждого оборванного троса. Порыв каждого троса (101) можно рассматривать, как отдельный магнитный диполь,  поле которого убывает пропорционально кубу расстояния (Курс общей физики, том 2, Электричество и магнетизм, волны, оптика. Издание второе, Москва «Наука», главная редакция физико-математической литературы, 1982).
поле которого убывает пропорционально кубу расстояния (Курс общей физики, том 2, Электричество и магнетизм, волны, оптика. Издание второе, Москва «Наука», главная редакция физико-математической литературы, 1982).
[0123] В результате, суммарное поле рассеяния и, соответственно, сигнал от СМП (121) пропорционален сумме  где ri - расстояние от i-го оборванного троса (магнитного диполя) до СМП (121) определяется по теореме Пифагора, исходя из разницы координат расположения СМП и оборванного троса на оси Y и расстояния h4. Распределение уровня сигнала V(y) вдоль оси Y поперек ленты над центром обрыва тросов (сечение А-А, при ϑ=90° формула для поля диполя принимает вид
где ri - расстояние от i-го оборванного троса (магнитного диполя) до СМП (121) определяется по теореме Пифагора, исходя из разницы координат расположения СМП и оборванного троса на оси Y и расстояния h4. Распределение уровня сигнала V(y) вдоль оси Y поперек ленты над центром обрыва тросов (сечение А-А, при ϑ=90° формула для поля диполя принимает вид  где pm - магнитный дипольный момент) определяется, как сумма откликов от каждого отдельного диполя (оборванного троса):
где pm - магнитный дипольный момент) определяется, как сумма откликов от каждого отдельного диполя (оборванного троса):
где С - коэффициент пропорциональности, учитывающий чувствительность СМП (121), магнитный дипольный момент оборванного троса pm, магнитную постоянную μ0; у - расположение СМП (121) на оси Y поперек ленты в единицах шага тросов t (центр координат расположен в середине повреждения); n - количество оборванных тросов в повреждении; i - индекс пробегающий месторасположение всех поврежденных тросов на оси Y от -(n-1)/2 до (n-1)/2 с шагом один, по сути, это координаты расположения оборванных тросов на оси Y в единицах шага тросов t, h4 - расстояние от СМП до плоскости тросов в единицах шага тросов t.
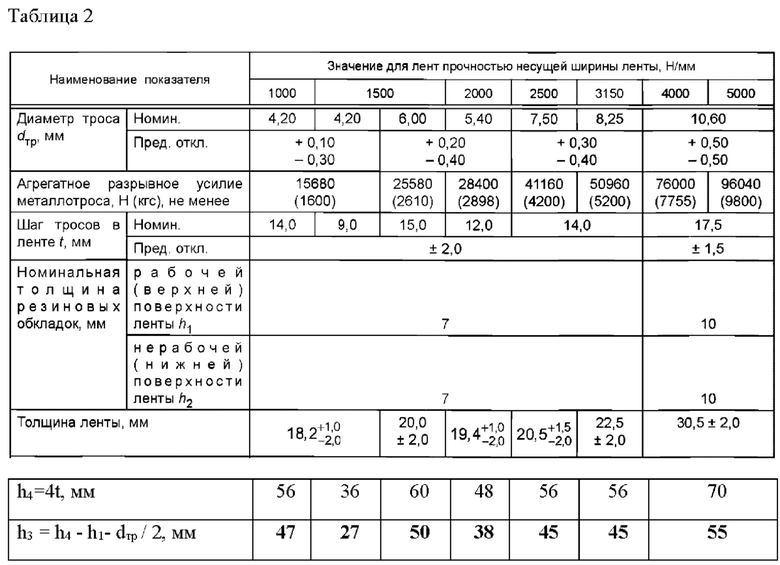
[0124] В качестве примера рассмотрим случай расположения СМП (121) над плоскостью тросов (102) на расстоянии в четыре шага троса h4=4t. При таком расположении расстояние от СМП (121) до поверхности ленты h3 составит от 27 мм до 55 мм (ГОСТ Р 56904-2016 / Ленты конвейерные резинотросовые для горнодобывающей промышленности), этого расстояния достаточно, чтобы избежать возможного соприкосновения с движущейся лентой в случае ее вибрации. Пример расчета h3 представлен в Таблице 2.
[0125] На Фиг. 11А представлен пример модельного расчета уровней сигналов от СМП, регистрирующих продольную составляющую магнитного поля Вх от 7 (семи) оборванных тросов (красным помечены оборванные троса, синим цельные) и при расстоянии h4=4t, а также разные пороговые уровни и расчетное количество оборванных тросов им соответствующих. Видно, что ширина сигнала на уровне порога Птрос = 540 мВ (область сигнала выше 540 мВ) в единицах шага тросов t составляет 7 и, как раз равна 7 оборванным тросам в повреждении, таким образом пороговое значение Птрос = 540 мВ можно считать правильно выбранным пороговым значением.
[0126] Если же уровень порогового значения Птрос = 540 мВ увеличить или уменьшить на 30%, то соответствующее расчетное количество оборванных тросов в повреждении с округлением будет 5 или 10 соответственно, что на 2-3 троса отличается от истинного количества оборванных тросов - 7 шт. (средняя ошибка в данном примере составляет 36%), а расчетные значения количества оборванных тросов 5 шт. и 10 шт. для пороговых значений Птрос 700 мВ и 380 мВ соответственно отличаются в 2 раза (абсолютные значения сигнала в мВ условны, т.к. все расчеты сделаны с точностью до коэффициента пропорциональности С в формуле для V(y)). Данный модельный расчет ясно показывает, что пороговые уровни сигнала Птрос должны быть откалиброваны.
[0127] Методами математического моделирования установлено, что уровень и форма сигнала от СМП (121) и подходящее пороговое значение для корректного определения количества оборванных тросов зависят, как от расстояния, на котором СМП (121) располагаются над плоскостью тросов гм, так и от количества оборванных тросов.
[0128] Расчет распределения уровня сигнала V(y) и оптимальный уровень порога для верного определения размера повреждения для разного количества оборванных тросов и расположения СМП на расстоянии h4=4t от плоскости тросов приведен на графиках Фиг. 11Б - Фиг. 11Г (красным цветом обозначены оборванные троса). Оптимальным уровнем порога является такой уровень, при котором ширина сигнала поперек ленты на уровне порога, деленная на шаг тросов t, дает количество фактически поврежденных тросов (1011) или, другими словами, ширина сигнала в единицах шага тросов равна количеству оборванных тросов. Из приведенных расчетов видно, что абсолютная величина уровня порога Птрос для определения размера повреждения находится в широком диапазоне значений, в зависимости от количества оборванных тросов: 153 мВ для 1-го оборванного троса, 489 мВ для 5-ти оборванных тросов и 620 мВ для 30 оборванных тросов (абсолютные значения сигнала условны, т.к. все расчеты сделаны с точностью до коэффициента пропорциональности С в формуле для V(y)).
[0129] В результате моделирования было установлено, что оптимальный уровень порога в процентном выражении от максимального значения сигнала в области повреждения имеет определенную зависимость от количества оборванных тросов, в частности, при большом количестве оборванных тросов в повреждении уровень оптимального порога стремится к 50% от максимального значения сигнала, а при малом количестве оборванных тросов в повреждении стремится в область значений близкую к 100%. На Фиг. 12 представлена диаграмма расчета оптимального уровня порога в % от максимального значения сигнала в области повреждения для примера с расположением СМП (121) на расстоянии h4=4t от плоскости тросов в зависимости от количества оборванных тросов в повреждении. Таким образом, для поиска оптимального уровня порога может быть использован подход относительного уровня порога в % от максимального значения сигнала в области повреждения.
[0130] В качестве примера, рассмотрим несколько вариантов определения оптимального порогового значения Птрос.
[0131] Вариант №1
В качестве варианта определения оптимального уровня порога можно взять среднее значение максимального и минимального % на всем множестве повреждений от 1 (одного) оборванного троса и более, что для примера с расстоянием h4=4t составит 74%=(50%+98%)/2.
[0132] Вариант №2
Имея возможность смоделировать сигнал от повреждения с любым количеством оборванных тросов, можно численными итерационными методами решить задачу поиска оптимального порогового уровня в % (процентах), при котором ошибка в определении количества оборванных тросов будет минимизирована на всем множестве повреждений от 1 до N оборванных тросов. В данном примере в качестве первой итерации можно взять уровень порога равный 74%, принятый в варианте №1.
[0133] Вариант №3
Использовать дифференцированные уровни порога для нескольких классов повреждений, например, все повреждения разбиваются на три класса: мелкое повреждение - несколько оборванных тросов, крупное повреждение - большое количество оборванных тросов и среднее повреждение - промежуточное количество оборванных тросов.
[0134] При этом, в вычислительном блоке (140) устанавливается уровень порогового значения для отсечения фона Пфон, ниже которого никакие сигналы не рассматриваются. Это делается для того, чтобы отфильтровать сигналы, регистрируемые сканером (120), от частичного (sub) повреждения троса (повреждены только отдельные жилы/пряди в тросе) и всякого рода шумовые артефакты.
[0135] Оценка уровня порогового значения для отсечения фона Пфон.
[0136] В настоящем решении оценка уровня порогового значения для отсечения фона Пфон может быть сделана исходя из того, что сигналы ниже порогового уровня для минимального повреждения (один оборванный трос), не имеет смысла рассматривать, в данном примере для варианта №1 оптимальное пороговое значение составляет 74% от максимума сигнала от одного оборванного троса VmaxN=1, т.е.:

[0137] Кроме того, можно рассчитать соотношение максимумов сигнала для одного оборванного троса Vmax N=1 и большого количества оборванных тросов Vmax N>>1 (Vmax N>>1 асимптотически стремится к насыщению при росте количества оборванных тросов N) - фактически это максимальный сигнал в стыковом соединении Vmax стык, где количество технологически оборванных тросов достигает максимума в ленте. В представленном примере за Vmax стык=Vmax N>>1 можно принять максимум сигнала от 30-ти оборванных тросов Vmax N=30, тогда:
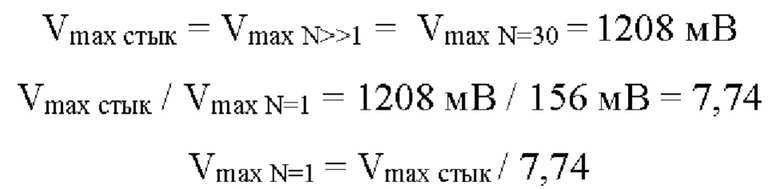
Подставляя в выражение для уровня порогового значения для отсечения фона Пфон, получается:

Данный расчет показывает, что уровень порогового значения для отсечения фона Пфон на порядок ниже максимального уровня сигнала в стыковом соединении. Так что, в качестве первого приближения, для выбора уровня порогового значения Пфон можно брать максимальное значение сигнала в стыковом соединении, заниженное на порядок.
[0138] Пороговые значения сигналов используемые для анализа магнитограммы ленты (100), полученной с помощью сканера (120), позволяют более точно и эффективно регистрировать возникающие повреждения, а также точно определять стыковые соединения, за счет того, что при определении размеров повреждения тросов и состояния стыковых соединений с помощью вычислительного блока (140) выполняется сравнение получаемых магнитограмм с одним или несколькими пороговыми значением сигнала Птрос, установленного для анализа тросов, а также с одним или несколькими пороговыми значениями сигнала Пстык для анализа стыковых соединений, при этом Пстык≥Птрос≥Пфон.
[0139] Рассмотрим далее пример разделения повреждений тросов на группы (классы) в зависимости от количества оборванных тросов. Разделение может происходить, например, с помощью выделения трех групп, с максимально равным «разбросом» в процентах внутри группы, как показано на Фиг. 13, в данном случае «разброс» в каждой группе приблизительно по ~13%.
1-я группа (мелкие повреждения): 1-3 оборванных троса;
2-я группа (средние повреждения): 4-7 оборванных тросов;
3-я группа (крупные повреждения): 8 и более оборванных тросов.
[0140] Для каждой группы определяется значение порога Птрос в процентном соотношении от максимума сигнала. Величину процента для каждой группы можно определить, например, как среднее арифметическое максимального и минимального значения в группе:
92% - для мелких повреждений (обрыв 1-3 троса);
73% - для средних повреждений (обрыв 4-7 тросов);
57% - для крупных повреждений (обрыв 8 и более тросов).
Возможны и другие способы определения значения порога Птрос в процентном соотношении для каждой группы, например, как среднее арифметическое всех значений в группе или может быть определено численными итерационными методами поиска оптимального порогового уровня в процентном соотношении для каждой группы, при котором ошибка в определении количества оборванных тросов в повреждении будет минимизирована на всем множестве повреждений в данной группе, в качестве первой итерации можно взять уровень порога в процентном соотношении определенный, как среднее арифметическое максимального и минимального значения в группе или всех значений в группе.
[0141] Алгоритм применения дифференцированных порогов Птрос может представлять собой метод последовательных итераций, рассмотрим вариант алгоритма на примере, описываемом выше: сначала для всех повреждений используется самый низкий процентный порог 57%, если расчетное количество оборванных тросов в повреждении с данным порогом получается восемь или более, то это количество оборванных тросов принимается, если же количество тросов меньше восьми, то порог повышается до следующего уровня 73%, если после этого расчетное количество оборванных тросов окажется в диапазоне 4-7 тросов, то это количество принимается, если же расчетное количество оборванных тросов будет меньше, то применяется следующий уровень порог 92% и принимается количество оборванных торосов при этом пороге. Алгоритм может применяться и в обратном направлении, начиная с самого высокого процентного порога 92% и далее уменьшаясь поэтапно до 73% и 57% соответственно. Возможно применение комбинации вышеописанных алгоритмов, например, каждое повреждение анализируется обоими алгоритмами на повышение процентного порога (57% -> 73% -> 92%) и на понижение процентного порога (92% -> 73% -> 57%) и в качестве количества поврежденных (оборванных) тросов в повреждении берется среднее арифметическое количества поврежденных тросов, полученное от исполнения каждого из двух алгоритмов.
[0142] Установка порогового значения Птрос может выполняться автоматически для каждого повреждения тросов на уровне, соответствующем определенной процентной доли от максимального значения сигнала от данного повреждения тросов. Указанная процентная доля может определяться автоматически, например, на основании расстояния СМП от плоскости тросов h4 в единицах шага тросов t, исходя из расстояния h3 от сканера (120) до поверхности транспортерной ленты (100) и параметров конструкции транспортерной ленты (100) - t, dтр, h1, h2 (таблица 2). При этом установка порогового значения может выполняться автоматически дифференцировано для нескольких классов повреждений с разным количеством оборванных тросов.
[0143] Стыковые соединения ввиду большего количества открытых (технологически оборванных) тросов имеют наибольшую величину сигнала и площадь изображения в пикселях в сравнении с областью повреждения тросов. Поэтому, для определения только стыковых соединений используются более высокие пороговые значения по величине сигнала и количеству пикселей, так что повреждения тросов отфильтровываются (отбрасываются). После того, как все стыковые соединения определены используется вышеописанная система калибровки для корректного определения количества оборванных тросов в местах повреждений.
[0144] При магнитном картировании навески транспортерной ленты на конвейере система сначала регистрирует все стыковые соединения и их взаимное расположение и при повторном обращении ленты на конвейере определяет повторяющиеся стыки (повторение паттерна взаимного расположения стыков), что позволяет системе определить все стыковые соединения без повтора и полную длину навески транспортерной ленты на конвейере. Стыковые соединения на магнитограмме транспортерной ленты используются, как точки отсчета (система координат) для определения положений повреждений ленты в продольном направлении вдоль ленты (координата ось X). Каждое повреждение имеет продольную координату от первого стыка и/или от ведущего и/или замыкающего стыкового соединения участка ленты, где находится повреждение или от любого другого стыкового соединения или от места на ленте, расположенном на заданном расстоянии от выбранного стыкового соединения. Первым стыковым соединением считается ведущее или замыкающее стыковое соединение участка ленты с заданным порядковым номером ранжирования участков по длине, где первый участок имеет наименьшую длину, а последующие участки - большую длину относительно предыдущего, при этом стыковое соединение участка ленты с заданным порядковым номером, расположенное первым по ходу ленты является ведущим, а второе - замыкающим или первое стыковое соединение задается вручную. Для работы на конвейере лента состыковывается в бесконечное кольцо из отдельных кусков (участков) ленты, поэтому каждый участок ленты имеет два стыковых соединения на его концах, стыковое соединение являющееся первым по ходу ленты называется ведущим, а второе стыковое соединение по ходу ленты - замыкающим.
[0145] Также на транспортерной ленте может дополнительно быть установлена метка, например, визуальная, магнитная, радиочастотная (RFID, NFC и т.п.) или иного типа, которая применяется для подтверждения регистрации полного оборота транспортерной ленты на конвейере в процессе сканирования, получения полной длины навески и точки отсчета продольной координаты вдоль ленты. Это позволяет получить данные полной длины ленты, с изображением всех стыковых соединений и повреждений тросов на ленте с указанием продольной координаты вдоль ленты. При этом участкам ленты (100) могут присваиваться порядковые номера от самого короткого по длине до большего с учетом увеличения их длины. Порядковые номера могут применяться для ранжирования участков R1-R3 ленты (100) по длине, как показано на Фиг. 14.
[0146] При анализе получаемых магнитограмм вычислительным блоком (140) выполняется определение площади повреждения тросов и площади полюсных линий ступени стыковых соединений на основании пороговых значений Птрос И Пстык, установленных для СМП (121). При этом применяется пороговый уровень площади Sтрос для определения повреждений тросов и пороговый уровень площади Sстык для определения полюсных линий ступени в стыковом соединении и самого стыкового соединения из них состоящего, при этом Sстык больше Sтрос. Scтык и Sтрос могут определяться количеством пикселей на магнитограмме. Для выбора Sстык и Sтрос можно произвести предварительный анализ магнитограммы. Например, принимая пороговое значение Пстык на уровне 50% максимума сигнала в стыковом соединении, с последующим расчетом площади полюсных линий ступени стыкового соединения для этого порогового значения Пстык, при этом величина порогового значения Sстык принимается равной половине этой площади. При необходимости, значение Пстык и Sстык можно увеличить/уменьшить, чтобы регистрировались все имеющиеся в ленте стыковые соединения и ничего больше. Для выбора Sтрос можно использовать, например, калибровочный образец транспортерной ленты с одним оборванным тросом. Для данного калибровочного образца подбирается такое пороговое значении Птрос при котором, система определяет, что количество оборванных тросов составляет всего один трос. Далее система определяет площадь повреждения одного троса для подобранного порогового значения Птрос Значение Sтрос принимается равным половине этой площади. При необходимости значение Птрос и Sтрос можно увеличить/уменьшить, чтобы соответственно избежать регистрации частичного повреждения троса и шумовых артефактов/утраты регистрации единичного обрыва троса.
[0147] Используя вышеуказанные данные при обработке поступающих от сканера (120) сигналов факт регистрации полюсных линий ступени в стыковом соединении и самого стыкового соединения из них состоящего на магнитограмме устанавливается в случае равенства или превышения сигналом порогового значения Пстык и равенства или превышения площади магнитной аномалии, определенной на основании Пстык, величины Sстык. Регистрация факта повреждений тросов на магнитограмме устанавливается вычислительным блоком (140) в случае выполнения всех следующих условий: равенства или превышение сигналом порогового значения Птрос, равенство или превышение площади магнитной аномалии, определенной на основании Птрос, величины Sтрос и при условии, что данная магнитная аномалия не зарегистрирована как полюсная линия ступени в стыковом соединении. Магнитные аномалии, для которых получаемый уровень Птрос ниже Пфон, не рассматриваются, т.к. характеризуют фоновые артефакты.
[0148] В одном из частных примеров реализации вычислительный блок (140) связан с системой управления ленточным конвейером, что позволяет осуществлять автоматическую остановку конвейера в случае возникновения критических повреждений. Подключение вычислительного блока (140) к такого рода системе может осуществляться через релейные выходы, по протоколу Modbus или сетям Profibus, Profinet или сетям иного типа.
[0149] Остановка конвейера осуществляется с помощью формирования сигнала вычислительным блоком (140), который передается в систему управления конвейером. Такой сигнал может формироваться в случае превышения заданного критического уровня повреждения тросов, который характеризуется одним или несколькими параметрами, такими как:
- размер повреждения, измеряемый количеством оборванных тросов или их процентной долей от общего количества тросов в ленте;
- общее количество оборванных тросов от всех зафиксированных повреждений на участке ленты заданной длины или их процентная доля от общего количества тросов в ленте.
[0150] Также, остановка конвейера может осуществляться при заданном изменении значения параметра состояния стыкового соединения относительно заданного порогового значения для по меньшей мере одного параметра выбираемого из группы: длина стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности полюсных линий ступени в стыковом соединении, расстояние между разными полюсными линиями ступени стыкового соединения, площадь полюсных линий ступени стыкового соединения, площадь стыкового соединения.
[0151] Заявленная система (10) и принцип ее работы не только определяет повреждения и стыковые соединения в ленте (100), но и позволяет выставить (выгнать) их в определенное место конвейера для детального осмотра и проведения ремонтных работ. Для этих целей в вычислительном блоке (140) предусмотрена опция, отслеживания положения сканера (120) относительно движущейся ленты в режиме реального времени (on-line), что также может отображаться на экране внешнего устройства (150), позволяя видеть положение сканера (120) на магнитограмме ленты с указанием продольной координаты вдоль ленты.
[0152] Отображение в GUI устройства (150) магнитограммы может выполняться в интерактивном режиме, позволяя выбирать интересующие повреждения и отслеживать их (например, с помощью простановки флага в программе), так, чтобы за определенное количество метров до подхода выбранного повреждения к месторасположению сканера (120) или иному месту конвейера на определенном удалении от сканера сработал оповещающий сигнал и оператор конвейера мог дать команду на его остановку.
[0153] При этом, как указывалось выше, если система стационарная, она может быть подключена к системе управления конвейером через релейные выходы или по протоколам Modbus или сетям Profibus, Profinet или сетям иного типа, что позволяет остановить конвейер в автоматическом режиме без оператора конвейера так, чтобы повреждение ленты или стыковое соединение оказалось на заданном расстоянии от сканера в определенном месте проведения инспекции и/или ремонта.
[0154] На Фиг. 15 представлен общий пример вычислительного блока (устройства) (400), например, вычислительный блок (вычислительный модуль), компьютер, сервер, ноутбук, смартфон, SoC (System-on-a-Chip/Система на кристалле) и т.п., которое может применяться для полной или частичной реализации заявленного решения, в частности, для реализации устройств (140, 150). В общем случае устройство (400) содержит такие компоненты, как: один или более процессоров (401), по меньшей мере одну оперативную память (402), средство постоянного хранения данных (403), интерфейсы ввода/вывода (404) включая релейные выходы для соединения с контроллерами управления движения ленточного конвейера, средство В/В (405), средства сетевого взаимодействия (406).
[0155] Процессор (401) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (400) или функционала одного или более его компонентов. Процессор (401) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (402).
[0156] Память (402), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал. Средство хранения данных (403) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (403) позволяет выполнять долгосрочное хранение различного вида информации, например, запись магнитограмм, истории обработки запросов (логов), идентификаторов пользователей, данные камер, изображения и т.п.
[0157] Интерфейсы (404) представляют собой стандартные средства для подключения и работы с вычислительными устройствами. Интерфейсы (404) могут представлять, например, релейные соединения, USB, RS232/422/485 или другие, RJ45, LPT, UART, СОМ, HDMI, PS/2, Lightning, Fire Wire и т.п. для работы, в том числе, по протоколам Modbus и сетям Probfibus, Profinet или сетям иного типа. Выбор интерфейсов (404) зависит от конкретного исполнения устройства (400), которое может представлять собой, вычислительный блок (вычислительный модуль), например на базе ЦПУ (одного или нескольких процессоров), микроконтроллера и т.п., персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п., а также подключаемых сторонних устройств.
[0158] В качестве средств В/В данных (405) может использоваться: клавиатура, джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
[0159] Средства сетевого взаимодействия (406) выбираются из устройства, обеспечивающего сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем, и т.п. С помощью средства (406) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM, квантовый (оптоволоконный) канал передачи данных, спутниковая связь и т.п. Компоненты устройства (400), как правило, сопряжены посредством общей шины передачи данных.
[0160] В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Система сканирования состояния тросовой транспортерной ленты ленточного конвейера содержит магнит, расположенный поперек транспортерной ленты и обеспечивающий намагничивание тросов транспортерной ленты; многоканальный сканер, содержащий группу сенсоров магнитного поля (СМП) и обеспечивающий сканирование транспортерной ленты для получения магнитограмм, отображающих сигналы от магнитного поля рассеяния (МПР) в области стыковых соединений и повреждений тросов; вычислительный блок, принимающий сигналы со сканера. Получаемые магнитограммы сравнивают с пороговым значением сигнала Птрос, установленного для анализа тросов, и с пороговым значением сигнала Пстык для анализа стыковых соединений. Отсекают сигналы, регистрируемые СМП, уровень которых менее порогового значения для отсечения фона Пфон. Определяют продольные и/или поперечные координаты повреждений тросов и/или продольные координаты расположения стыковых соединений. Данные обработки магнитограмм передают на внешнее устройство. Повышается эффективность контроля состояния транспортерной ленты. 2 н. и 43 з.п. ф-лы, 15 ил., 2 табл.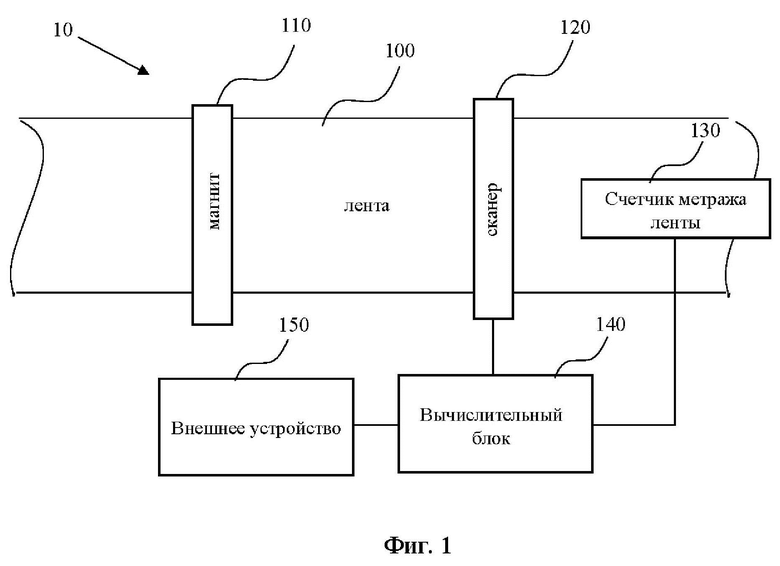
1. Система сканирования состояния тросовой транспортерной ленты ленточного конвейера, содержащая:
по меньшей мере один магнит, расположенный поперек транспортерной ленты и обеспечивающий намагничивание тросов транспортерной ленты;
по меньшей мере один многоканальный сканер, содержащий группу сенсоров магнитного поля (СМП) и обеспечивающий сканирование транспортерной ленты для получения магнитограмм, отображающих сигналы от магнитного поля рассеяния (МПР) в области стыковых соединений и повреждений тросов;
вычислительный блок, принимающий сигналы со сканера и выполняющий:
a) обработку получаемых магнитограмм для определения размера повреждения тросов и/или состояния стыковых соединений в транспортерной ленте, при этом состояние стыковых соединений характеризуется по меньшей мере их длинной, при этом при определении размеров повреждения тросов и/или состояния стыковых соединений с помощью вычислительного блока получаемые магнитограммы сравниваются по меньшей мере с одним пороговым значением сигнала Птрос, установленного для анализа тросов, и по меньшей мере с одним пороговым значением сигнала Пстык для анализа стыковых соединений, и вычислительный блок выполнен с возможностью отсечения сигналов, регистрируемых СМП, уровень которых менее порогового значения для отсечения фона Пфон;
b) определение продольных и/или поперечных координат повреждений тросов и/или продольных координат расположения стыковых соединений;
c) передачу данных обработки магнитограмм, полученных на этапе а) и b) на внешнее устройство.
2. Система по п. 1, в которой сканер располагается на расстоянии от поверхности ленты не более 1000 мм.
3. Система по п. 1, в которой группа СМП расположена в один ряд или по меньшей мере в два ряда.
4. Система по п. 3, в которой ряды СМП располагаются в шахматном порядке.
5. Система по п. 1, в которой СМП регистрируют по меньшей мере одну компоненту МПР, выбираемую из группы: продольная Вх, поперечная Ву или перпендикулярная Bz.
6. Система по п. 1, в которой сканер содержит концентраторы магнитного потока, которые обеспечивают пассивное магнитное усиление и увеличение выходной чувствительности СМП без увеличения его собственных электрических шумов.
7. Система по п. 6, в которой концентраторы выполняются интегрированными в СМП.
8. Система по п. 6, в которой концентраторы магнитного потока выполняются стержневыми или плоскими.
9. Система по п. 1, в которой поперечная координата по ширине ленты отсчитывается от борта или центра транспортерной ленты.
10. Система по п. 1, в которой над сканером устанавливается экран, обеспечивающий защиту от сторонних магнитных полей.
11. Система по п. 1, в которой магнит является постоянным магнитом или электромагнитом.
12. Система по п. 1, в которой магнит располагается на расстоянии от поверхности ленты не более 1000 мм.
13. Система по п. 1, в которой магнитная ось магнита перпендикулярна поверхности ленты.
14. Система по п. 1, в которой сканер располагается после магнита по ходу транспортерной ленты.
15. Система по п. 1, которая дополнительно содержит счетчик метража ленты, формирующий сигналы, передаваемые в вычислительный блок, характеризующие продольный метраж транспортерной ленты.
16. Система по п. 15, в которой счетчик метража ленты выполнен на базе бесконтактного тахометра или проксиметра, установленного на барабане или ролике конвейера, или энкодера с колесом, контактирующим с движущейся лентой.
17. Система по п. 1, в которой внешнее устройство подключено к вычислительному блоку посредством проводного или беспроводного канала передачи данных.
18. Система по п. 1, в которой внешнее устройство представляет собой монитор, или интерактивный экран, или компьютер, или ноутбук, или планшет, или смартфон, или съемный носитель данных, или ПЛК управления конвейером, или удаленную систему управления.
19. Система по п. 1, в которой вычислительный блок формирует отчет в цифровом виде, содержащий данные о повреждении тросов и данные о состоянии стыковых соединений в транспортерной ленте.
20. Система по 1, в которой дополнительно содержится по меньшей мере одна видеокамера, фиксирующая видеоизображение поверхности транспортерной ленты, при этом видеоизображение синхронизировано с магнитограммой.
21. Система по п. 1, в которой размер повреждения тросов характеризуется количеством оборванных тросов в обнаруженном повреждении.
22. Система по п. 1, в которой вычислительный блок дополнительно определяет по меньшей мере один из следующих параметров: порядковый номер стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности полюсных линий ступени в стыковом соединении, площадь полюсных линий ступени стыкового соединения, расстояние между разными полюсными линиями ступени стыкового соединения.
23. Система по п. 1, в которой Пстык≥Птрос≥Пфон.
24. Система по п. 1, в которой вычислительный блок дополнительно осуществляет определение площади повреждения тросов и площади полюсных линий ступени в стыковых соединениях на основании пороговых значений Птрос и Пстык для СМП.
25. Система по п. 24, в которой вычислительный блок использует пороговый уровень площади Sтрос для определения повреждений тросов и пороговый уровень площади Sстык для определения полюсных линий ступени в стыковом соединении и самих стыковых соединений из них состоящих, при этом Sстык больше Sтрос.
26. Система по п. 24, в которой факт регистрации полюсных линий ступени в стыковом соединении и самого стыкового соединения, состоящего из них, на магнитограмме устанавливается вычислительным блоком при обработке получаемых сигналов от сканера в случае равенства или превышения сигналом порогового значения Пстык и равенства или превышения площади магнитной аномалии, определенной на основании Пстык, величины Sстык.
27. Система по п. 24, в которой факт регистрации повреждения тросов на магнитограмме устанавливается вычислительным блоком при обработке получаемых сигналов от сканера в случае выполнения следующих условий: равенство или превышение сигналом порогового значения Птрос и равенство или превышение площади магнитной аномалии, определенной на основании Птрос, величины втрое при условии, что данная магнитная аномалия не зарегистрирована как полюсная линия ступени в стыковом соединении.
28. Система по п. 27, в которой пороговый уровень сигнала Птрос для СМП определяется с помощью калибровки на калибровочных образцах ленты с заданными повреждениями или принимается равным Пфон, или устанавливается вычислительным блоком автоматически с использованием метода аналитической калибровки.
29. Система по п. 28, в которой установка порогового значения Птрос происходит автоматически для каждого повреждения тросов на уровне, соответствующем определенной процентной доли от максимального значения сигнала от данного повреждения тросов.
30. Система по п. 29, в которой процентная доля от максимального значения сигнала для установки порогового значения Птрос определяется автоматически, исходя из параметров расположения сканера на конвейере и параметров конструкции транспортерной ленты.
31. Система по п. 29, в которой установка порогового значения Птрос происходит автоматически дифференцировано для нескольких классов повреждений.
32. Система по п. 1, в которой вычислительный блок производит магнитное картирование всей навески транспортерной ленты на ленточном конвейере с определением полной длины ленты, изображением всех стыковых соединений и повреждений тросов на ленте с указанием продольной координаты вдоль ленты.
33. Система по п. 32, в которой первым стыковым соединением на магнитной карте ленты является ведущее или замыкающее стыковое соединение участка ленты с заданным порядковым номером ранжирования участков по длине, где первый участок имеет наименьшую длину, а последующие участки - большую длину относительно предыдущего, при этом стыковое соединение участка ленты с заданным порядковым номером, расположенное первым по ходу ленты является ведущим, а второе - замыкающим или первое стыковое соединение задается вручную.
34. Система по п. 33, в которой продольная координата стыковых соединений и повреждений тросов отсчитывается от первого стыкового соединения или от точки на ленте, расположенной на заданном расстоянии от первого стыкового соединения.
35. Система по п. 33, в которой продольная координата повреждений тросов ленты отсчитывается от ведущего и/или замыкающего стыкового соединения участка ленты, где находится повреждение или от точки на ленте, расположенной на заданном расстоянии от ведущего и/или замыкающего стыкового соединения данного участка ленты.
36. Система по п. 33, в которой продольная координата стыковых соединений и повреждений тросов ленты отсчитывается от визуальной, магнитной, или радиочастотной метки, дополнительно установленной на транспортерной ленте.
37. Система по п. 1, в которой вычислительный блок подключен к системе управления ленточным конвейером.
38. Система по п. 37, в которой вычислительный блок подключен к системе управления ленточным конвейером одним из следующих способов: через релейные выходы, по протоколу Modbus или сетям Profibus или Profinet.
39. Система по п. 37, в которой вычислительный блок выполнен с возможностью формирования сигнала для системы управления ленточным конвейером на остановку ленточного конвейера при превышении заданного уровня повреждения тросов, характеризующегося по меньшей мере одним параметром выбираемым из группы: размер повреждения, измеряемый количеством оборванных тросов или их процентной долей от общего количества тросов в ленте; общее количество оборванных тросов от всех зафиксированных повреждений на участке ленты заданной длины или их процентная доля от общего количества тросов в ленте.
40. Система по п. 37, в которой вычислительный блок выполнен с возможностью формирования сигнала для системы управления ленточным конвейером на остановку ленточного конвейера при заданном изменении значения параметра состояния стыкового соединения относительно заданного порогового значения по меньшей мере одним параметром выбираемым из группы: длина стыкового соединения, угол наклона полюсных линий ступени в стыковом соединении, степень линейности линий ступени в стыковом соединении, расстояние между разными полюсными линиями ступени стыкового соединения, площадь полюсных линий ступени стыкового соединения, площадь стыкового соединения.
41. Система по п. 40, в которой площадь стыкового соединения определяется, как суммарная площадь всех полюсных линий ступени в стыковом соединении, или характеризуется двумя величинами, каждая из которых является суммарной площадью полюсных линий ступени одной полярности, или разницей, или комбинацией этих двух величин, или как площадь, заключенная между крайними полюсными линиями ступени стыкового соединения.
42. Система по п. 37, в которой вычислительный блок, подключенный к системе управления ленточным конвейером, выполнен с возможностью формирования сигнала для остановки ленточного конвейера таким образом, чтобы обеспечить выгон участка ленты с повреждением тросов или стыковое соединение на заранее заданном расстоянии от сканера.
43. Система по п. 1, в которой вычислительный блок интегрирован в сканер.
44. Система по п. 1, в которой СМП представляют собой датчики Холла.
45. Способ сканирования состояния тросовой транспортерной ленты ленточного конвейера, содержащий этапы, на которых:
выполняют намагничивание тросов транспортерной ленты с помощью по меньшей мере одного магнита, расположенного поперек транспортерной ленты;
выполняют сканирование транспортерной ленты по меньшей мере одним многоканальным сканером, содержащим группу сенсоров магнитного поля (СМП), при этом в ходе сканирования получают магнитограммы, отображающие сигналы от магнитного поля рассеяния (МПР) в области стыковых соединений и повреждений тросов;
принимают сигналы, формируемые сканером, в вычислительном блоке, который обеспечивает:
a) обработку получаемых магнитограмм для определения размера повреждения тросов и/или состояния стыковых соединений в транспортерной ленте, при этом состояние стыковых соединений характеризуется по меньшей мере их длинной, при этом при определении размеров повреждения тросов и/или состояния стыковых соединений с помощью вычислительного блока получаемые магнитограммы сравниваются по меньшей мере с одним пороговым значением сигнала Птрос, установленного для анализа тросов, и по меньшей мере с одним пороговым значением сигнала Пстык для анализа стыковых соединений, и вычислительный блок выполнен с возможностью отсечения сигналов, регистрируемых СМП, уровень которых менее порогового значения для отсечения фона Пфон;
b) определение продольных и/или поперечных координат повреждений тросов и/или продольных координат расположения стыковых соединений;
c) передачу данных обработки магнитограмм, полученных на этапе а) и b) на внешнее устройство.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА СОЕДИНЕНИЕМ ТРАНСПОРТЕРНОЙ ЛЕНТЫ | 1999 |
|
RU2185597C2 |
| D | |||
| Olchowka, R | |||
| Blazej and L | |||
| Jurdziak | |||
| Selection of measurement parameters using the DiagBelt magnetic system on the test conveyor | |||
| Journal of Physics: Conference Series, Volume 2198 (2022) | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

