Изобретение относится к радиолокации, в частности к многопозиционной радиолокации, в том числе с обнаружением «на просвет», и может быть использовано для обнаружения, измерения координат и сопровождения летящих объектов как в воздушном пространстве, так и в ближнем космосе.
Известны бистатические радиолокационные станции (РЛС) (см. Черняк B.C. Многозвенная радиолокация. - М.: Радио и связь, 1993, - 416 с., Справочник по радиолокации. Перевод с английского под ред. М.Сколника. Т.4. - М.: Советское радио, 1979), в том числе многопозиционные, в которых передающий и приемный комплексы аппаратуры разнесены в пространстве. Такое построение имеет ряд преимуществ по сравнению с моностатическим радиолокатором (см. Уфимцев П.Я. // Радиотехника и электроника, 1989, т.35, №12 - с.2519-2527, Glaser J. Bistatic RCS of Complex Objects Near Forward Scatter, IEEE Transactions on aerospace and electronic systems. Vol. AES-21, №1, January, 1985. - p.70-78), заключающихся в возможности реализации метода радиолокации, основанного на просветном эффекте, состоящем в том, что при облучении объекта, размеры которого в несколько раз больше длины волны, излучаемой передатчиком, энергия, рассеянная назад, на несколько порядков (в среднем на три) меньше энергии, рассеянной вперед, по линии облучения, в результате чего эффективная площадь рассеяния (ЭПР) объекта при наблюдении в бистатическом радиолокаторе «на просвет» в тысячи раз превосходит ЭПР объекта для традиционного моностатического радиолокатора.
Известен радиолокационный комплекс (см. RU 2324197), содержащий бистатическую «просветную» радиолокационную станцию (РЛС), представляющую собой разнесенные в пространстве передающую позицию в составе последовательно соединенных передатчика и передающей антенны и приемную позицию в составе последовательно соединенных приемной антенны с многолучевой диаграммой направленности, приемного устройства и рабочего места оператора, при этом передающая и приемная антенны подняты на высоту, обеспечивающую прямую радиовидимость, и направлены встречно, при этом на приемной позиции введена моностатическая РЛС, зона обнаружения которой перекрывает зону обнаружения бистатической "просветной" РЛС, причем вход-выход моностатической РЛС соединен с выходом-входом рабочего места оператора, обеспечивающего команду включения моностатической РЛС по указанию от бистатической "просветной" РЛС, отображение, идентификацию радиолокационной информации и выдачу целеуказания внешнему потребителю в виде выходной информации радиолокационного комплекса, при этом рабочие частоты бистатической "просветной" РЛС и моностатической РЛС смещены для обеспечения их одновременной работы.
Однако в большинстве известных РЛС в качестве излучаемого сигнала передающей станции, а также принимающего отраженного сигнала, сравнение которого с излученным несет информацию о положении объекта, используются импульсные или квазигармонические сигналы. Для обработки отраженного сигнала при применении традиционных методов радиолокации должна быть известна структура излученного сигнала. Корреляционная обработка подобных сигналов либо невозможна либо малоэффективна, что влияет на точность координатных измерений объекта. Ширина полосы приемного устройства определяется характером излучаемых сигналов передающей РЛС и обычно невелика.
В бистатических известных РЛС параметры приемного и передающего комплексов взаимно связаны, т.е. приемная станция может работать только по сигналам своей РЛС.
Кроме того, при многопозиционной локации прямой сигнал от передающей станции в ряде случаев является паразитным и требуется его подавление для обработки отраженного от цели сигнала.
Задачей, на решение которой направлено заявляемое изобретение, является применение корреляционных методов обработки шумовых сигналов для повышения надежности обнаружения целей и увеличения точности измерения координат объектов в воздушном и космическом пространствах.
Техническим результатом изобретения является прием одной антенной (или двумя рядом расположенными антеннами) двух квазишумовых сигналов - отраженного от объекта и опорного от передающей станции, корреляция между которыми несет информацию о наличии объекта (обнаружение), величине задержки между сигналами (направление на объект) и изменении задержки во времени (скорость).
Известно, что чувствительность приемного устройства и точность определения задержки зависят от ширины полосы приема. Расширение полосы приема до десятков МГц эффективно только при шумовом или квазишумовом спектре излучаемого сигнала.
Для достижения указанного технического результата радиолокационный комплекс представляет собой разнесенные в пространстве передающую и приемную станции, где в качестве передающей станции используются космические естественные или искусственные источники шумового сигнала, а приемная станция является наземной и содержит антенну и приемное устройство, включающее основной приемный тракт для шумовых сигналов, систему регистрации квантованного шумового сигнала, коррелятор, синхронометр, причем основной приемный тракт включает малошумящий усилитель (МШУ) с широкой полосой приема и подключенный к МШУ преобразователь частоты с выходом, соединенным с системой регистрации, к которой также подключен синхронометр и которая содержит два канала записи, выходы которых подключены к коррелятору.
Для увеличения чувствительности и выделения узкой зоны обзора в наземную станцию радиолокационного комплекса могут быть дополнительно введены опорная антенна и сумматор, причем приемная антенна подключена к первому входу сумматора, а опорная антенна подключена ко второму входу сумматора, и выход сумматора подключен к основному приемному тракту.
Для увеличения эффективности в случае «просветного» эффекта с малыми временами задержки в наземную станцию радиолокационного комплекса могут быть дополнительно введены опорная антенна и подключенный к опорной антенне приемный тракт, идентичный основному приемному тракту, причем выходы этих приемных трактов подключены соответственно к первому и второму каналам записи системы регистрации.
В предлагаемом радиолокационном комплексе в качестве опорного сигнала используется прямой сигнал, имеющий квазишумовой спектр, одной или нескольких передающих РЛС, находящихся в околоземном космическом пространстве. В качестве приемной позиции используется антенна со слабонаправленной диаграммой направленности, зона обнаружения которой включает непосредственно «просветные» РЛС для создания опорного сигнала. Поскольку в приемной системе используется широкополосный приемник, то тонкая структура спектра сигнала передающей станции не имеет значения и поэтому в качестве передающих РЛС могут использоваться любые космические аппараты (КА), излучающие квазишумовые сигналы, а также излучение Солнца - наиболее мощного естественного радиоисточника. Данный вариант устройства наиболее эффективен при обнаружении целей в воздушном пространстве и в ближнем космосе на высотах в сотни километров с использованием «просветного» эффекта, когда величина рассеянного целью сигнала сравнима по интенсивности с опорным.
На высотах цели от нескольких сотен метров до десятков километров вне зоны «просветного» эффекта эффективность устройства будет определяться чувствительностью приемной станции, поскольку отраженный от цели сигнал зависит от эффективного поперечника рассеяния (ЭПР) и значительно меньше опорного сигнала. В этом случае возможно применение направленной антенны с большим коэффициентом усиления для слежения за целью и небольшой опорной антенны, следящей за одной из передающих РЛС, сигналы обеих антенн суммируются перед МШУ приемного тракта.
В настоящее время в околоземном пространстве находятся несколько десятков искусственных спутников земли (ИСЗ), излучающих квазишумовые сигналы: навигационные ГЛОНАСС и GPS, ретрансляционные, связные и т.д. Применение в наземных приемных пунктах РЛС широкополосного приема с корреляционной обработкой дает возможность использования имеющихся космических передатчиков в качестве элементов многопозиционных РЛС, причем многопозиционным является и передающий комплекс. Кроме того, в качестве источника широкополосного излучения с практически непрерывным радиоспектром можно использовать Солнце, интенсивность излучения которого сравнима с интенсивностью большинства искусственных излучателей в околоземном космическом пространстве. Задержка между сигналами при «просветной» локации изменяется в зависимости от положения объекта от нуля до значений в несколько десятков километров, что позволяет проводить оперативный поиск источника излучения быстродействующим коррелятором. Процесс корреляции двух потоков информации (от двух каналов записи) может проводиться в квазиреальном времени. Отраженные объектом сигналы нескольких "просветных" РЛС будут возникать при разных задержках, что позволит определить координаты объекта в пространстве с высокой точностью только одним приемным комплексом. Известно (Справочник по радиолокации. Перевод с английского под ред. М.Сколника. Т.4. - М.: Советское радио, 1979, с.203), что в многопозиционных системах определять положение цели можно только по измерению дальностей (задержек сигнала), при четырех приемных пунктах задача решается полностью. При использовании сигнала одной космической РЛС потребуется увеличить число приемных комплексов как минимум до двух при обзоре заданной области пространства.
На фиг.1 изображен радиолокационный комплекс, представляющий собой разнесенные в пространстве передающую и приемную станции, где в качестве передающей станции используются космические естественные или искусственные источники шумового сигнала, а приемная станция является наземной и содержит наземную антенну 1, подключенную к входу приемного устройства, которое включает основной приемный тракт для квазишумовых сигналов 2, систему регистрации квантованного шумового сигнала 3, коррелятор 4, синхронометр 5. Основной приемный тракт 2 содержит малошумящий усилитель (МШУ) 6 и подключенный к МШУ 6 преобразователь промежуточной частоты 7, который состоит из смесителя 8, гетеродина 9, усилителя промежуточной частоты (УПЧ) 10. При этом выход МШУ 6 подключен к первому входу смесителя 8, ко второму входу которого подключен гетеродин 9, а выход смесителя 8 подключен ко входу УПЧ 10, выход которого соединен с системой регистрации 3, к которой подключен синхронометр 5 для записи меток времени и которая содержит два идентичных канала записи 11 и 12, выходы которых подключены к коррелятору 4.
Работа устройства производится следующим образом.
В приемную наземную антенну 1 поступают два сигнала: опорный от РЛС и рассеянный от летящего объекта с задержкой, определяемой взаимным расположением цели и приемной антенны 1. Общий сигнал поступает на вход основного приемного тракта 2, где усиливается с помощью МШУ 6, преобразуется на низкую промежуточную частоту в преобразователе 7. В системе регистрации 3 сигнал преобразуются в цифровой вид, записывается на два магнитных носителя 11 и 12 вместе с метками времени от устройства синхронизации (синхронометра) 5 и подается на коррелятор 4. Первичная обработка - получение отклика при корреляции двух потоков информации с введением переменной задержки (для компенсации разности хода принимаемых сигналов) производится непосредственно в процессе наблюдений в режиме квазиреального времени. Коррелятор 4 производит перемножение сигналов (программное) с введением переменной задержки в один из потоков информации. По максимуму кросскоррелированного сигнала определяется точная задержка между сигналами, а по максимуму его спектра определяется частота интерференции, обусловленная движением источника относительно приемной антенны 1. В зависимости от взаимного расположения приемной антенны 1, РЛС и предполагаемого нахождения цели рассчитывается диапазон изменения задержки и соответственно ускоряется процесс поиска отраженного сигнала.
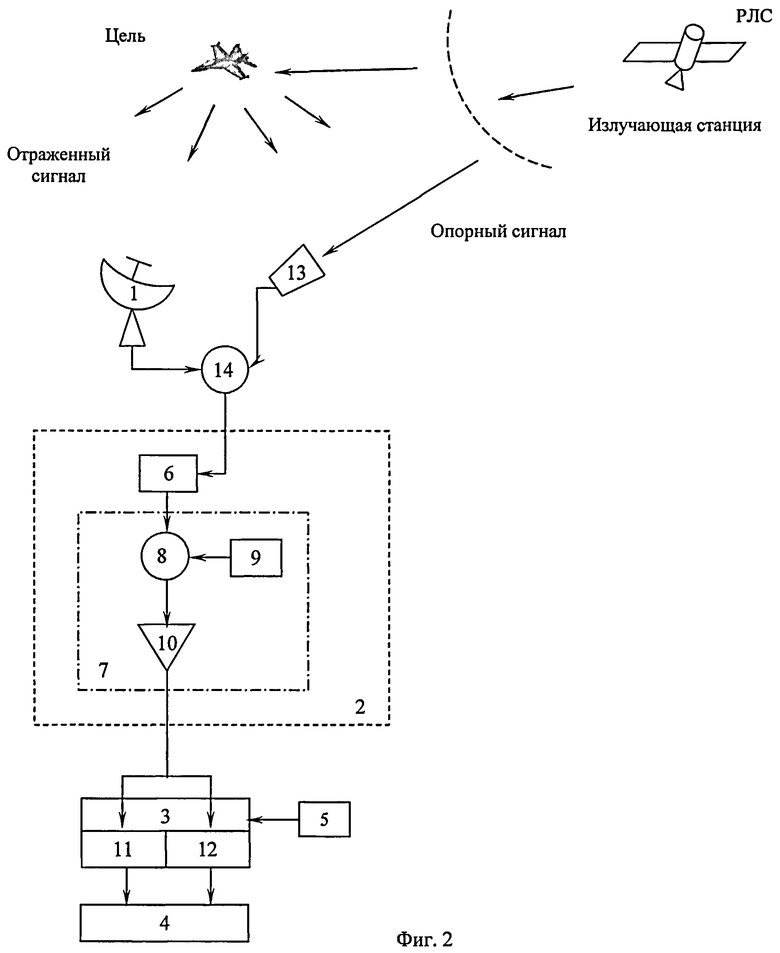
Для увеличения чувствительности устройства и выделения узкой зоны обзора опорный сигнал может формироваться с помощью дополнительной антенны 13 (фиг.2), присоединенной через сумматор 14 к основному приемному тракту 2, к которому также через сумматор 14 подключена основная приемная антенна 1, причем малая опорная антенна 13 направлена в зону расположения "просветных" РЛС, а узконаправленная антенна с большой эффективной площадью 1 направлена в требуемую зону обзора (наиболее вероятного появления целей). В этом случае возможно достижение примерного равенства опорного и полезного сигналов.
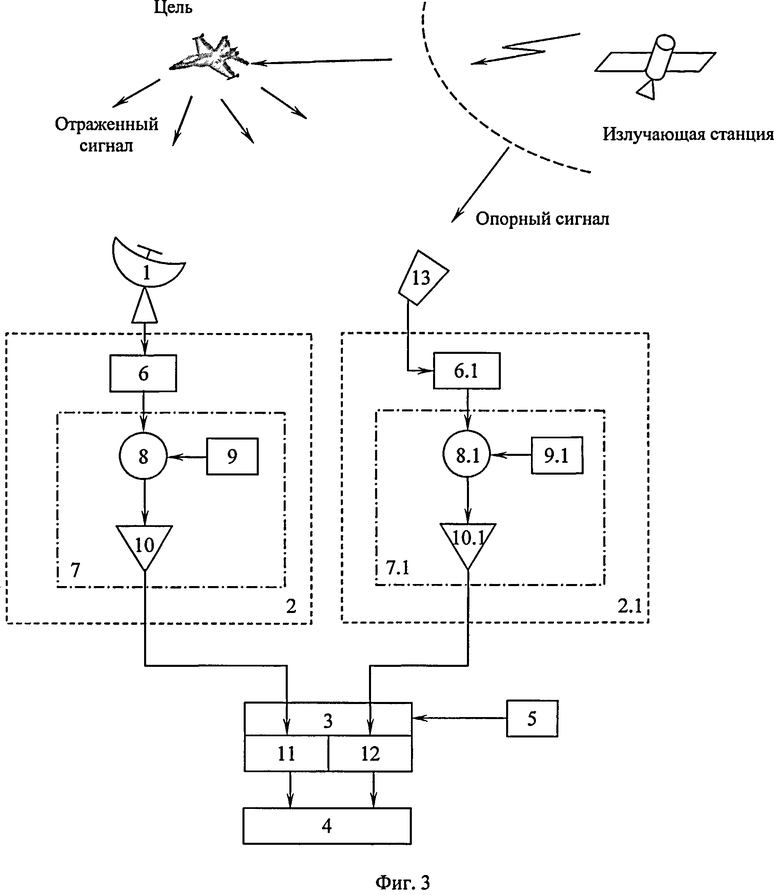
Для увеличения эффективности устройства в случае «просветного» эффекта с малыми временами задержки опорный сигнал может формироваться с помощью дополнительной опорной антенны 13 (фиг.3), имеющей свой независимый дополнительный приемный тракт 2.1, идентичный основному приемному тракту 2, и который включает МШУ 6.1 и подключенный к МШУ 6.1 преобразователь промежуточной частоты 7.1, состоящий из смесителя 8.1, гетеродина 9.1, усилителя промежуточной частоты (УПЧ) 10.1, где выход МШУ 6.1 подключен к первому входу смесителя 8.1, ко второму входу которого подключен гетеродин 9.1, а выход смесителя 8.1 подключен к входу УПЧ 10.1, причем выходы основного 2 и дополнительного 2.1 приемных трактов подключены соответственно к первому 11 и второму 12 каналам записи системы регистрации 3.
В этом случае из-за независимости шумов приемных каналов отсутствует максимум кросскорреляционной функции при нулевой задержке (как это имеет место для автокорреляционной функции), что дает возможность находить полезный сигнал при малых задержках.
Работа предлагаемого устройства проверялась на аппаратуре по схеме, изображенной на фиг.4, на рабочей частоте 610 МГц при полосе приема 8 МГц. Сигнал генератора шума 15 (ГШ) разветвлялся на два канала, один из которых напрямую подавался на сумматор 14, имитируя опорный сигнал РЛС. Второй сигнал подавался на сумматор 14 через линию задержки 16 с временем запаздывания τ, имеющую затухание 15-20 дБ, имитирующую отраженный от объекта сигнал. Общий сигнал с сумматора 14 подавался на вход МШУ 6, преобразовывался в видеочастоту с помощью преобразователя частоты 7 и записывался на магнитный носитель ЭВМ 11 в системе регистрации 3 и далее проводилась автокорреляционная обработка этого сигнала с изменением задержки от нуля до значений, превышающих τ. Наличие отклика в автокорреляционном сигнале при задержке τ означало обнаружение сигнала от ГШ 15. Точное значение задержки сигнала в лабораторном макете позволяло определить разность электрических длин приемных трактов опорного и задержанного сигналов. Сравнение полученного значения задержки с известным значением τ давало оценку точности метода.
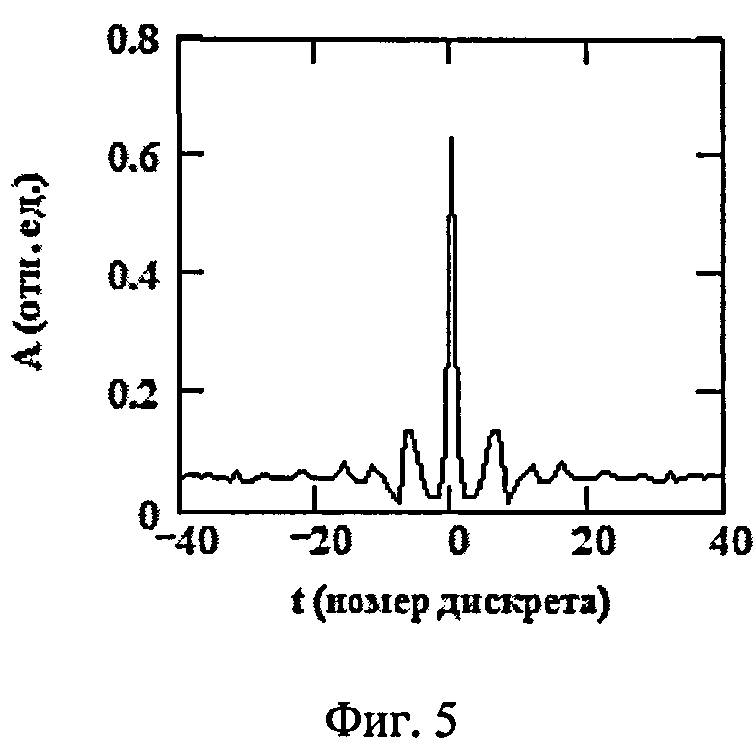
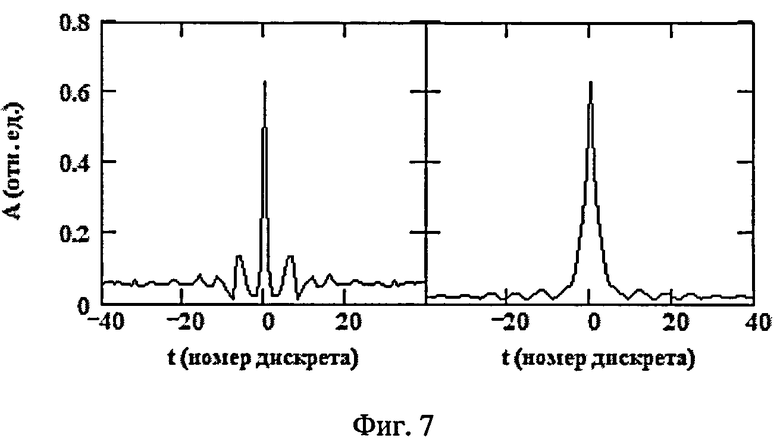
На фиг.5 приведена амплитуда автокорреляционной функции сигнала ГШ в зависимости от задержки при работе по схеме фиг.4 (автокорреляционная функция является симметричной). На фиг.6 приведен тот же график, но центральный максимум, обусловленный автокорреляцией шумов приемника, исключен для удобства масштабирования. Максимум при значении задержки около +7 дискретов (один дискрет соответствует 62,5 нс) является откликом приемной системы на сигнал ГШ и определяет задержку сигнала в тракте 16 (фиг.4). На фиг.7 слева приведена автокорреляционная функция, фиг.5, с включенным ГШ, справа - ГШ выключен: видно, что боковой максимум автокорреляционной функции обусловлен наличием сигнала ГШ.
Кроме того, был проведен эксперимент с приемом сигнала ГШ на два идентичных тракта (фиг.3). На фиг.8 показана кросскорреляционная функция при приеме сигнала ГШ на два приемных устройства без введения задержки в один из трактов. На фиг.9 - вид корреляционной функции, когда в один из трактов вводится кроме прямого сигнала ГШ дополнительно задержанный на величину τ (аналогично фиг.4). Видно, что в выходном сигнале после обработки появляются два максимума кросскорреляционной функции, обусловленные прямым и задержанным сигналами ГШ в одном тракте при корреляции с прямым сигналом ГШ во втором тракте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324197C2 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В НАЗЕМНО-КОСМИЧЕСКОЙ ПРОСВЕТНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2015 |
|
RU2608338C1 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ ЗЕМЛИ | 2018 |
|
RU2703294C1 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| СПОСОБ И КОМПЛЕКС БАРЬЕРНОГО ЗЕНИТНОГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА БАЗЕ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2015 |
|
RU2615988C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |




Изобретение относится к радиолокации и может быть использовано для обнаружения, измерения координат и сопровождения летящих объектов как в воздушном пространстве, так и в ближнем космосе. Радиолокационный комплекс представляет собой разнесенные в пространстве передающую и приемную станции, где в качестве передающей станции используются космические естественные или искусственные источники шумового сигнала, а приемная станция является наземной и содержит антенну и приемное устройство, включающее основной приемный тракт для шумовых сигналов, систему регистрации квантованного шумового сигнала, коррелятор, синхронометр. При этом основной приемный тракт включает малошумящий усилитель (МШУ) с широкой полосой приема и подключенный к МШУ преобразователь частоты с выходом, соединенным с системой регистрации, к которой подключен синхронометр и которая содержит два канала записи, выходы которых подключены к коррелятору. Достигаемым техническим результатом изобретения является прием одной антенной (или двумя рядом расположенными антеннами) двух квазишумовых сигналов - отраженного от объекта и опорного от передающей станции, корреляция между которыми несет информацию о наличии объекта (обнаружение), величине задержки между сигналами (направление на объект) и изменении задержки во времени (скорость). 2 з.п. ф-лы, 9 ил.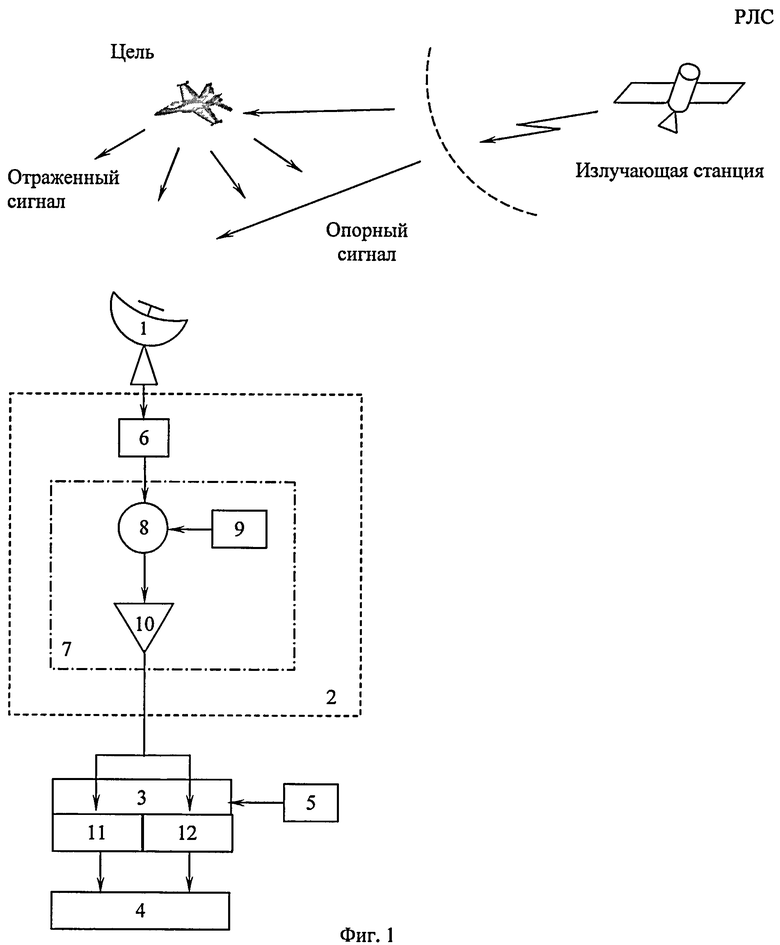
1. Радиолокационный комплекс, представляющий собой разнесенные в пространстве передающую и приемную станции, отличающийся тем, что в качестве передающей станции используются космические естественные или искусственные источники шумового сигнала, а приемная станция является наземной и содержит антенну и приемное устройство, включающее основной приемный тракт для шумовых сигналов, систему регистрации квантованного шумового сигнала, коррелятор, синхронометр, при этом основной приемный тракт включает малошумящий усилитель (МШУ) с широкой полосой приема и подключенный к МШУ преобразователь частоты с выходом, соединенным с системой регистрации, к которой подключен синхронометр, и которая содержит два канала записи, выходы которых подключены к коррелятору.
2. Радиолокационный комплекс по п.1, отличающийся тем, что в наземную станцию дополнительно введены опорная антенна и сумматор, причем приемная антенна подключена к первому входу сумматора, опорная антенна подключена ко второму входу сумматора, а выход сумматора подключен к основному приемному тракту.
3. Радиолокационный комплекс по п.1, отличающийся тем, что в наземную станцию дополнительно введены опорная антенна и подключенный к опорной антенне дополнительный приемный тракт, идентичный основному приемному тракту, причем выходы этих приемных трактов подключены соответственно к первому и второму каналам записи системы регистрации.
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324197C2 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ (ВАРИАНТЫ) И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2145093C1 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| US 7071868 B2, 04.07.2006 | |||
| US 2008169968 A1, 17.07.2008 | |||
| KR 20080022187 A, 10.03.2008 | |||
| DE 19643675 B4, 10.04.2008. | |||

