Изобретение относится к радиолокации, в частности к многопозиционной радиолокации с обнаружением "на просвет", и может быть использовано для обнаружения, измерения координат, распознавания и сопровождения низколетящих малоразмерных объектов.
В многопозиционном радиолокаторе передающий и приемный комплексы аппаратуры разнесены в пространстве. Такое построение имеет ряд преимуществ по сравнению с моностатическим радиолокатором [1, 2].
Известны многопозиционные, в частности, бистатические радиолокационные станции (РЛС), реализующие метод радиолокации "на просвет", основанный на просветном эффекте [1]. Суть эффекта заключается в том, что при облучении объекта, размеры которого в несколько раз больше длины волны, излучаемой передатчиком, энергия, рассеянная назад, на несколько порядков (в среднем на три) меньше энергии, рассеянной вперед по линии облучения. Таким образом, эффективная площадь рассеяния (ЭПР) объекта при наблюдении в бистатическом радиолокаторе "на просвет" в тысячи раз превосходит ЭПР объекта для традиционного моностатического радиолокатора, что является одним из важнейших преимуществ "просветных" РЛС.
Другим важнейшим преимуществом "просветных" РЛС является независимость ЭПР переднего рассеяния от материала, из которого изготовлен объект, и, в частности, от наличия на нем Стелс-покрытия [1, 3]. Поэтому в зоне существования просветного эффекта бистатическая РЛС имеет более высокие характеристики обнаружения малозаметных объектов (крылатых ракет, самолетов-Стелс, маловысотных самолетов и вертолетов, дельтапланов, шаров и т.д.), чем традиционная моностатическая РЛС.
Известна бистатическая РЛС [5] с обнаружением "на просвет", предназначенная для обнаружения малозаметных объектов, которая выбрана в качестве прототипа. Она включает в себя разнесенные в пространстве передающую позицию в составе передатчика и передающей антенны и приемную позицию в составе приемной антенны, приемного устройства и рабочего места оператора (РМО), выход которого является выходом РЛС. Обе антенны подняты на высоту, обеспечивающую прямую радиовидимость, и направлены встречно. Диаграмма направленности передающей антенны обеспечивает облучение всей зоны существования просветного эффекта (примерно ±30° в горизонтальной плоскости относительно базовой линии между передающей и приемной антеннами и в пределах 10 км по высоте). Приемная антенна формирует веер диаграмм направленности в области существования просветного эффекта. Обнаружение объекта осуществляется путем анализа доплеровских биений частоты эхо-сигналов, возникающих в приемном устройстве при движении воздушных объектов в просветной зоне.
Известно [1, с.317], что значение доплеровской частоты обращается в ноль для эхо-сигналов от объекта, находящегося на базовой линии. Вдоль этой линии на приемную позицию воздействует прямой сигнал передатчика, который на 3-5 порядков (30-50 дБ) превосходит эхо-сигнал от объекта. Вблизи этой линии могут находиться облучаемые передающей антенной местные предметы, эхо-сигналы от которых формируют мощную пассивную помеху в приемном устройстве. Прямой сигнал передатчика может перегружать приемное устройство, вводя его в режим ограничения. Это приводит к нарушению или даже к срыву обнаружения объектов. Мощная пассивная помеха нарушает обнаружение и сопровождение объектов не только вблизи базовой линии, но и во всей зоне существования просветного эффекта. Для устранения отрицательного влияния прямого сигнала передатчика и мощной пассивной помехи в прототипе используется режекция доплеровских сигналов на нулевой частоте (т.е. постоянного тока) и в некоторой ее окрестности - зоне режекции, ширина которой может составлять 2-5 Гц. Эхо-сигналы объектов, имеющие такую же доплеровскую частоту, также режектируются. Зоне режекции соответствует некая область, примыкающая к базовой линии в зоне обнаружения РЛС, внутри которой объекты не обнаруживаются.
Известно [1, с.317], что доплеровская частота эхо-сигнала пропорциональна составляющей скорости объекта, ортогональной базовой линии. Поэтому, чем меньше скорость объекта, тем при данной ширине частотной зоны режекции шире просветная область, где объект не обнаруживается.
Таким образом, у РЛС-прототипа есть существенный недостаток - наличие внутри зоны обнаружения области нечувствительности тем более широкой, чем меньше скорость объекта. Этот недостаток устранен в предлагаемом изобретении.
Для устранения вышеуказанного недостатка в РЛС-прототип вводится моностатическая РЛС, размещаемая на приемной позиции бистатической "просветной" РЛС и управляемая сигналами с выхода РМО бистатической РЛС. При этом зона обнаружения моностатической РЛС перекрывает зону обнаружения бистатической "просветной" РЛС-прототипа.
Техническим результатом предлагаемого изобретения является устранение области нечувствительности внутри зоны обнаружения бистатической "просветной" РЛС, что ведет к повышению вероятности обнаружения и исключению возможности срыва сопровождения объектов в предлагаемом РЛК.
На фиг.1 представлена структурная схема предлагаемого радиолокационного комплекса (РЛК), который содержит бистатическую "просветную" РЛС, представляющую собой разнесенные в пространстве передающую позицию в составе последовательно соединенных передатчика 1 и передающей антенны 2 и приемную позицию в составе последовательно соединенных приемной антенны 3 с многолучевой диаграммой направленности, приемного устройства 4, рабочего места оператора (РМО) 5, выход которого является выходом РЛК, и моностатической РЛС 6, вход-выход которой соединен с выходом-входом РМО 5. Передающая и приемная антенны бистатической РЛС направлены встречно и подняты на высоту, обеспечивающую прямую радиовидимость. Зона обнаружения моностатической РЛС 6 перекрывает зону обнаружения бистатической "просветной" РЛС.
Предлагаемый РЛК работает следующим образом.
Передатчик 1 формирует непрерывный квазигармонический сигнал, излучаемый передающей антенной 2 в широком секторе углов в направлении приемной антенны 3, обеспечивая облучение всей зоны существования просветного эффекта. Многолучевая приемная антенна 3 формирует веер лучей в области существования просветного эффекта. Центральный луч направлен на передающую антенну. При движении воздушных объектов в просветной зоне между передающей и приемной позициями в каждом канале приемного устройства 4, соответствующем определенному лучу приемной антенны 3, возникают доплеровские биения частоты принятого сигнала, анализ которых позволяет [5] обнаружить воздушный объект и получить радиолокационную информацию о его параметрах (количество объектов в зоне обзора, класс объекта, его плоскостные координаты и скорость). Эта информация из приемного устройства 4 передается на рабочее место оператора 5 для отображения, обработки и выдачи целеуказания вместе с командой включения на вход моностатической РЛС.
"Просветная" бистатическая РЛС работает постоянно, а моностатическая включается только при обнаружении объектов бистатической РЛС на время, в течение которого объект находится в просветной зоне. Моностатическая РЛС работает в режиме импульсного зондирования, облучая всю зону обнаружения бистатической РЛС и реализуя обзор пространства, обнаруживает объект, определяет дальность до объекта и направление на него стандартными методами [6] и выдает эту информацию на РМО 5 для идентификации, отображения и передачи внешнему потребителю в виде выходной информации РЛК. Рабочие частоты зондирующих сигналов обеих РЛС смещены, что позволяет им работать одновременно.
Ниже представлены результаты математического моделирования, иллюстрирующие положительный эффект при использовании предлагаемого изобретения.
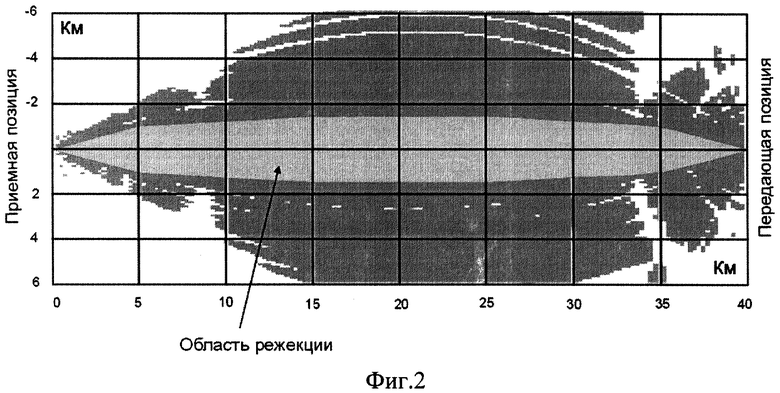
На фиг.2 представлена зона обнаружения воздушного объекта (вертолет Ми-2) устройства-прототипа (бистатической "просветной" РЛС), в которой выделена область режекции (область необнаружения объекта), ширина которой зависит от направления и скорости движения объекта. Видно, что область режекции составляет значительную часть зоны обнаружения.
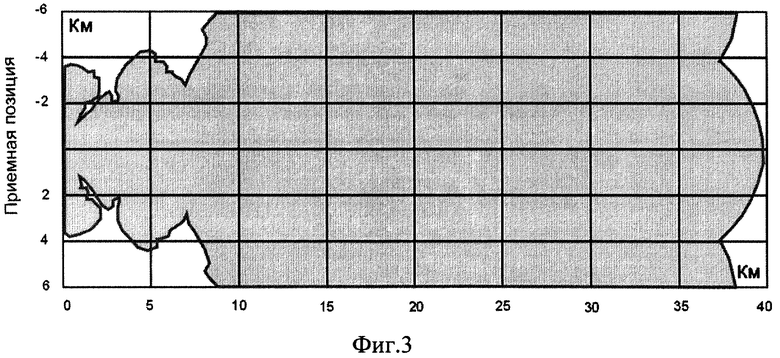
На фиг.3 представлена зона обнаружения того же воздушного объекта моностатической РЛС с параметрами, которые обеспечивают обнаружение объектов во всей зоне бистатической "просветной" РЛС, в том числе и в области режекции. Проведенные расчеты показывают, что такая зона обнаружения обеспечивается, если средняя мощность излучения моностатической РЛС почти на три порядка больше, чем у бистатической "просветной" РЛС, что обусловлено отличиями в величине ЭПР объекта для моностатической и бистатической "просветной" РЛС, поэтому при непрерывной работе только одной моностатической РЛС обнаружение в этой зоне было бы значительно менее экономичным, чем при совместной работе бистатической и моностатической РЛС, когда последняя включается только по указанию бистатической РЛС.
Таким образом, введение в известную бистатическую "просветную" РЛС моностатической РЛС с зоной обнаружения, перекрывающей зону обнаружения бистатической РЛС, с соответствующими связями, позволяет устранить область нечувствительности внутри зоны обнаружения бистатической РЛС, что ведет к повышению вероятности обнаружения и исключению возможности срыва сопровождения объектов в прелагаемом РЛК.
Литература
1. Черняк B.C. Многозвенная радиолокация. - М.: Радио и связь, 1993, - 416 с.
2. Справочник по радиолокации. Перевод с английского под ред. М. Сколника. Т.4. - М.: Советское радио, 1979.
3. Уфимцев П.Я. // Радиотехника и электроника, 1989, т.35, №12. - с.2519-2527.
4. Glaser J. Bistatic RCS of Complex Objects Near Forward Scatter, IEEE Transactions on aerospace and electronic systems. Vol. AES-21, №1, January, 1985. - p.70-78.
5. Бляхман А.Б., Самарин А.В. Бистатическая радиолокационная станция. Заявка ЕАПО №200401555/26 от 23.12.2004 г.
6. Справочник по радиолокации. Перевод с английского под ред. М.Сколника. Т.3 - М.: Советское радио, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2422849C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| Радиолокационная станция | 2016 |
|
RU2618521C1 |
| Способ локации целей | 2023 |
|
RU2814430C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В НАЗЕМНО-КОСМИЧЕСКОЙ ПРОСВЕТНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2015 |
|
RU2608338C1 |
Изобретение относится к радиолокации и может быть использовано для обнаружения, измерения координат, распознавания и сопровождения низколетящих малоразмерных объектов. Техническим результатом изобретения является устранение области нечувствительности внутри зоны обнаружения бистатической "просветной" РЛС. Для достижения указанного технического результата в известную бистатическую "просветную" РЛС, представляющую собой разнесенные в пространстве передающую позицию в составе последовательно соединенных передатчика и передающей антенны и приемную позицию в составе последовательно соединенных приемной антенны с многолучевой диаграммой направленности, приемного устройства и рабочего места оператора (РМО), при этом передающая и приемная антенны подняты на высоту, обеспечивающую прямую радиовидимость, и направлены встречно, на приемной позиции введена моностатическая РЛС, зона обнаружения которой перекрывает зону обнаружения бистатической "просветной" РЛС, причем вход-выход моностатической РЛС соединен с выходом-входом РМО, выход которого является выходом РЛК. 3 ил.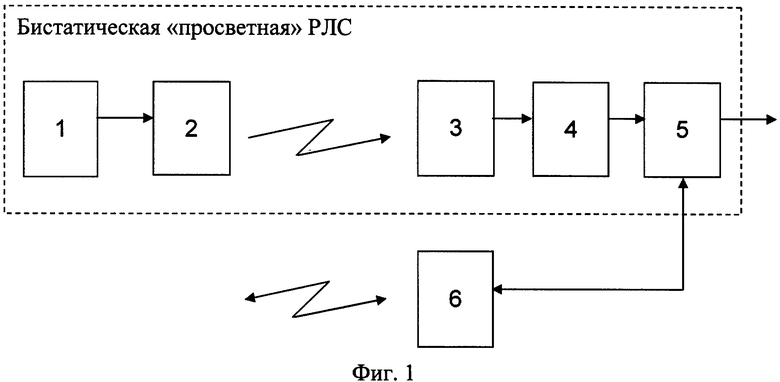
Радиолокационный комплекс (РЛК), содержащий бистатическую "просветную" радиолокационную станцию (РЛС), представляющую собой разнесенные в пространстве передающую позицию в составе последовательно соединенных передатчика и передающей антенны и приемную позицию в составе последовательно соединенных приемной антенны с многолучевой диаграммой направленности, приемного устройства и рабочего места оператора, при этом передающая и приемная антенны подняты на высоту, обеспечивающую прямую радиовидимость, и направлены встречно, отличающийся тем, что на приемной позиции введена моностатическая РЛС, зона обнаружения которой перекрывает зону обнаружения бистатической "просветной" РЛС, причем вход-выход моностатической РЛС соединен с выходом-входом рабочего места оператора, обеспечивающего команду включения моностатической РЛС по указанию от бистатической "просветной" РЛС, отображение, идентификацию радиолокационной информации и выдачу целеуказания внешнему потребителю в виде выходной информации радиолокационного комплекса, при этом рабочие частоты бистатической "просветной" РЛС и моностатической РЛС смещены для обеспечения их одновременной работы.
| УФИМЦЕВ П.Я | |||
| Радиотехника и электроника, 1989, т.35, №12, с.2519-25-27 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| WO 2005106524 А2, 10.11.2005 | |||
| US 6864828 В1, 08.03.2005 | |||
| US 2004145514 А1, 29.07.2004. | |||

