Изобретение относится к радиолокации и может быть использовано в широкополосных шумовых (использующих шумоподобные сигналы) многофункциональных радиолокационных системах СВЧ-диапазона, основной задачей которых является оценка и анализ радиолокационной обстановки, включающей в себя обзор заданной области пространства, поиск и обнаружение целей, определение их координат и уточнение параметров траектории полета.
Известно, что требуемая мощность радиопередатчиков современных радиотехнических систем в некоторых случаях на три-пять порядков превышает максимальную мощность, генерируемую электронными приборами (Журавлев Д.В. «Основы современной радиоэлектроники», ФГБОУ ВПО «Воронежский государственный технический университет», 2013, стр. 163-169). Мощность электровакуумных приборов в непрерывном режиме работы достигает десятков киловатт, в импульсном - мегаватт. Максимальная мощность полупроводниковых приборов значительно ниже. Вместе с тем требуемая мощность СВЧ радиопередатчиков в непрерывном режиме работы достигает нескольких киловатт. Желание соответствовать этим требованиям привело, во-первых, к необходимости применения нескольких генераторов сигнала в одном радиопередатчике (радиопередающем устройстве), в связи с чем проблема суммирования мощностей сигналов генераторов приобрела в радиотехнике весьма важное значение, во-вторых, к необходимости суммирования сигналов, разнесенных (автономных) передатчиков, что крайне актуально для увеличения дальности действия радиолокаторов или линий связи.
Наиболее эффективным способом суммирования мощностей сигналов однотипных генераторов является сложение мощностей сигналов в пространстве. Сигналов большого числа определенным образом ориентированных излучателей, каждый из которых возбуждается либо от общего генератора с разделением сигнала по элементам, либо от самостоятельного генератора, синхронизируемого от общего генератора. Например фазированная антенная решетка (ФАР).
Кроме того, важнейшей характеристикой современных РЛС является количество информации, полученное за время обзора заданной области пространства.
Количество информации I прямо пропорционально ширине полосы пропускания Δƒ и времени наблюдения, поэтому можно выбрать два направления увеличения величины I:
переход к параллельному обзору пространства;
увеличение Δƒ за счет перехода от узкополосных систем к широкополосным и сверхширокополосным.
Известно, что для активной локации оптимальным зондирующим сигналом является «белый шум» - сверхширокополосный хаотический сигнал с нормальным (гауссовым) распределением вероятностей, неограниченный по спектру и времени (Залогин Н.Н., Калинин В.И., Скнаря А.В. Активная локация с использованием широкополосных хаотических сигналов. Сигналы в радиолокации. 1 номер, т. 3, 2011. РЕНСИТ, стр. 3-15). Такой сигнал обеспечивает возможность одновременного и высокоточного определения дальности и скорости цели. Использование разнесенных в пространстве малогабаритных приемных устройств позволяет с помощью методов интерферометрии существенно уточнить параметры лоцируемых целей (координаты, дальность, скорость). Длительные хаотические сигналы с полосой порядка октавы (fmax/fmin=2) обеспечивают заданную точность и однозначность измерений. Спецификой таких сигналов является особенность их обработки, которая осуществляется корреляционными методами. Эксперименты, проведенные с радиолокатором, непрерывный сигнал которого в сантиметровом диапазоне имел полосу порядка октавы, показали, что такой способ локации реализуется только для относительно небольших расстояний до целей.
Известны сверхширокополосные РЛС, излучающие импульсные сигналы нано- и пикосекундной длительности (Н. Щербак. Сверхширокополосная радиолокация. ЭЛЕКТРОНИКА: Наука, Технология, бизнес 3/2002, стр. 38-46). Особенностью таких систем является небольшая дальность действия и сложность согласования антенных систем с передатчиками и приемниками в сверхширокой полосе (СШП) частот, а, следовательно, сложность получения высокого коэффициента усиления антенн в рабочей полосе частот, что для РЛС, построенных по традиционной схеме, является недостатками.
Известны РЛС, использующие многочастотные зондирующие сигналы, формирующие зондирующий сигнал расширенного спектра за счет одновременного излучения нескольких импульсов заданной длительности на различных несущих частотах, что позволяет увеличить суммарную мощность излучения РЛС при наличии ограничений мощности отдельного передатчика, что позволяет строить систему с высокой разрешающей способностью и обеспечить большую дальность обнаружения и точность измерения координат и параметров траектории полета цели (Mehrfrequenz radargeräte. url: https://www.radartutorial.eu/01.basics/frequenz-diversity%20radar.de.html, дата обращения: 14.02.2024). Повышение разрешающей способности улучшает помехозащищенность от распределенных пассивных помех и снижает вероятность пропадания отраженных сигналов за счет флуктуаций отражающих поверхностей точечной цели. Основным преимуществом применения многочастотных систем является уменьшение флуктуаций отраженного от объекта сигнала и подавление уровня боковых лепестков.
Наиболее простым в реализации многочастотного метода является способ, при котором многочастотный сигнал формируется группой передатчиков с различными несущими частотами, одновременно работающих на общую или на отдельные антенны. Для приема сигналов на разных частотах используются отдельные приемники. В таких многочастотных РЛС непрерывного излучения, как правило, каждый передатчик работает на отдельную передающую антенну, а каждый приемник подключен соответственно к отдельной приемной антенне. Такая схема передающего тракта характерна для многочастотных РЛС непрерывного излучения, например, доплеровских РЛС обнаружения низколетящих целей.
Недостатки:
сильная взаимная связь параметров сигнала, характеризующих дальность и доплеровский сдвиг, приводящая к неоднозначности измерения дальности при неизвестной скорости цели и наоборот;
появление дополнительных потерь за счет рассогласования частотной характеристики линейной части приемника и спектра отраженного сигнала из-за необходимости использования весовой обработки для уменьшения уровня боковых лепестков сжатого импульса до приемлемого уровня;
составные части зондирующих сигналов на разных частотах обрабатываются параллельно каждый в своем частотном канале. Далее эти сигналы суммируются и полученный результат сравнивается с пороговым значением амплитуды принимаемого сигнала, которое может быть зафиксировано согласно заданному отношению сигнал/шум. Соответственно, число аппаратурных каналов приемных станций возрастает с увеличением числа излучаемых частот. Кроме того, недостатком многочастотных радиолокаторов является сложность конструкции приемо-передающего тракта при моностатической схеме РЛС.
Известен радиолокатор с непрерывным шумовым сигналом («Радиолокатор с непрерывным шумовым сигналом и способ расширения диапазона измеряемых дальностей в радиолокаторе с непрерывным сигналом», патент RU №2589036). Цель указанного изобретения -расширение верхних и нижних границ диапазона измеряемых дальностей в радиолокаторе с непрерывным шумовым сигналом для заданного разноса приемной и передающей антенн при сохранении скрытности и повышенной помехозащищенности. Недостатком является наличие сильной межантенной связи и сложная схема ее компенсации.
В качестве прототипа выбран сверхширокополосный радиолокатор с активной многочастотной антенной решеткой («Сверхширокополосный радиолокатор с активной многочастотной антенной решеткой», патент RU 2615996), формирующий общую частотную полосу излучения за счет отдельных элементов ФАР, излучающих синхронизированные сигналы в соседних поддиапазонах. Радиолокатор работает в традиционном режиме «передача-прием» каждым элементом ФАР, а обработка ведется в каждом отдельном частотном канале с последующим суммированием когерентных сжатых импульсов.
Недостатками прототипа являются:
размещение приемников и передатчиков в непосредственной близости (вместе) или их совмещение, что не позволяет обнаруживать внеземные объекты (космический мусор, близкие астероиды) на больших дальностях и требует синхронизации приема-передачи зондирующих сигналов;
обработка отдельно в каждом частотном диапазоне, что не позволяет суммировать мощность отраженных зондирующих сигналов и формировать широкополосные сигналы высокой мощности с использованием маломощных передатчиков;
сложность реализации многопозиционной радиолокации с сохранением мобильности из-за необходимости организации линий синхронизации;
использование всеми передающими станциями полного спектра зондирующих сигналов, используемых в радиолокационном комплексе, что затрудняет формирование мощных широкополосных шумоподобных зондирующих сигналов в целях увеличения дальности и увеличения области радиолокационного обзора.
В отличие от прототипа в предлагаемом способе передатчики и приемники разделены, а отдельные передающие и приемные антенные элементы разнесены в пространстве. При этом в структурной схеме отсутствуют переключатели «прием-передача» и общий генератор-синхронизатор в излучающей части радиолокационного комплекса, а приемные модули имеют только один широкополосный частотный канал.
Технической задачей изобретения является повышение дальности и надежности обнаружения воздушных и внеземных объектов (космического мусора, близких астероидов) путем увеличения мощности зондирующего сигнала за счет суммирования сигналов автономных передающих антенн и повышение точности измерения координат и параметров траекторий полета объектов за счет применения многопунктовой приемной системы с одноканальными широкополосными приемными устройствами.
Технический результат достигается путем применения многоэлементного передающего устройства, формирующего зондирующий сигнал, представляющий собой сумму нескольких шумоподобных сигналов в нескольких широких смежных без перекрытия частотных полосах (поддиапазонах), каждый из которых излучается автономным передатчиком, и широкополосной приемной системы, состоящей из 2-х или более приемных элементов с заданной общей полосой пропускания, равной всему диапазону частот сформированного зондирующего сигнала, с использованием одноантенных приемных элементов в режиме регистрации шумоподобного сигнала, отраженного от объекта, или двухантенных приемных элементов в интерферометрическом режиме с корреляционной обработкой.
Для достижения технического результата предложен Способ радиолокации на основе многопозиционных систем передачи и приема, определяющий порядок размещения и функционирования передающих и приемных комплексов, в том числе определяющий порядок передачи, приема и обработки зондирующих шумоподобных сигналов.
Основная идея изобретения базируется на следующих теоретических положениях.
Формирование общего широкодиапазонного (широкополосного) шумоподобного зондирующего сигнала осуществляется сложением в пространстве сигналов всех поддиапазонов, излучаемых всеми элементами передающей системы.
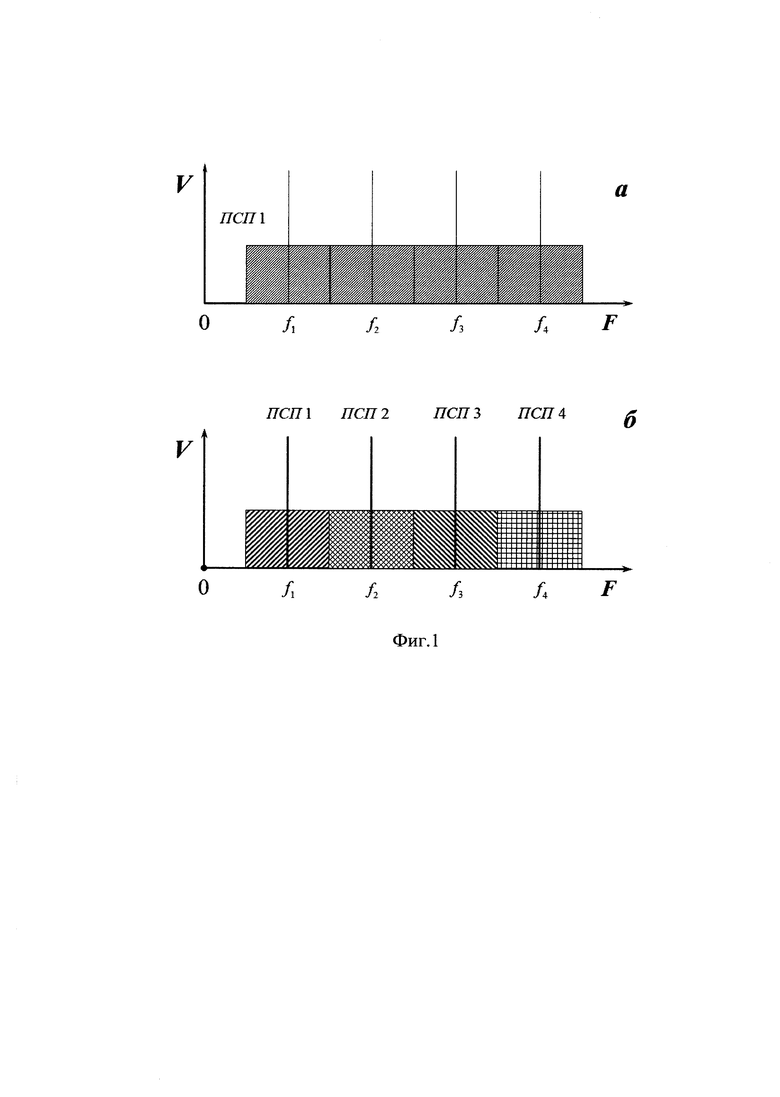
При формировании зондирующего сигнала с применением модуляции псевдослучайной последовательностью (ПСП) возможно использование модуляции всех передатчиков как одной (фиг. 1а), так и разными ПСП (фиг. 1б).
Способ формирования зондирующего сигнала с помощью многоантенных передающих устройств с автономными генераторами, создающими шумовые сигналы в нескольких широких частотных полосах Δƒ (Δƒ-4÷32 МГц), полосы - смежные, без перекрытия.
Преимуществами применения многопунктовых широкополосных передатчиков являются:
возможность использования полупроводниковых генераторов небольшой мощности (1-2 КВт) на каждой из передающих станций (антенн); требуемая суммарная мощность излучения достигается применением необходимого числа N передающих антенн;
отсутствие общего генератора для синхронизации генераторов каждого передатчика, а также аппаратуры приемных станций;
отсутствие необходимости совместной обработки излучаемых и принимаемых сигналов, а именно, отсутствие линий передачи сигналов передатчиков в приемную систему или формирование модели излучаемого сигнала для обработки с принятыми сигналами;
отсутствие жестких требований на взаимное расположение передающих антенн.
Приемный комплекс состоит из антенн с одноканальными широкополосными приемными устройствами (с заданной общей полосой, равной сумме частотных полос поддиапазонов передатчиков), работающими как в режиме однопунктового приема, так и в стандартном интерферометрическом режиме с корреляционной обработкой при синхронизации гетеродинов приемных станций от общего стандарта частоты и времени. При этом не требуется синхронизация и фазировка передаваемых сигналов.
Преимущества такого построения приемного комплекса:
1) Расширение полосы приема ведет к увеличению энергии сигнала на входе приемника пропорционально полосе Δƒ(при равномерном спектре).
Чувствительность приемника рассчитывается по соотношению
 ,
,
где Тш - шумовая температура приемной системы (К), τ - постоянная времени накопления сигнала, α=0,95-0.99 - коэффициент, зависящий от типа приемника (Есепкина Н.А., Корольков Д.В., Парийский Ю.Н. Радиотелескопы и радиометры. «Наука», М. 1973, гл. 10, стр. 236).
При синтезе широкой полосы из частотных полос разных автономных источников шума сигналы в этих полосах будут некогерентны. Тем не менее, энергия общего сигнала будет пропорциональна суммарной ширине полосы частот. Это обстоятельство определяет отсутствие ограничений на взаимное расположение как передающих, так и приемных антенн, поскольку нет необходимости в синхронизации и фазировке излучаемых и принимаемых сигналов. Условием наиболее эффективного приема шумоподобных сигналов является максимально возможное приближение спектра их частот к белому шуму.
2) При разнесенных передатчиках отраженный от объекта сигнал формируется из сигналов частотных поддиапазонов с разными задержками (фазами), но в разнесенных приемных пунктах эти суммарные сигналы идентичны. Интерферометрический прием двумя антеннами с кросскорреляционной обработкой позволяет выделить полезный сигнал и определить задержку г, и далее суммировать сигналы всех антенн приемного комплекса. В этом случае нет ограничений на форму частотного спектра излучаемых сигналов.
Алгоритм кросскорреляционной обработки заключается в следующем.
Высокочастотные сигналы в широкой полосе Δƒ поступают на входы приемных систем двух пунктов интерферометра, переносятся гетеродинированием на видеочастоту, оцифровываются и передаются на два входа коррелятора (или записываются регистрирующим устройством с последующей передачей записанной информации на входы коррелятора). В результате обработки с перебором возможных значений задержки прихода одного из сигналов относительно другого, определяемых взаимным расположением источника излучения и приемных антенн, получается корреляционная функция (КФ) сигналов вида
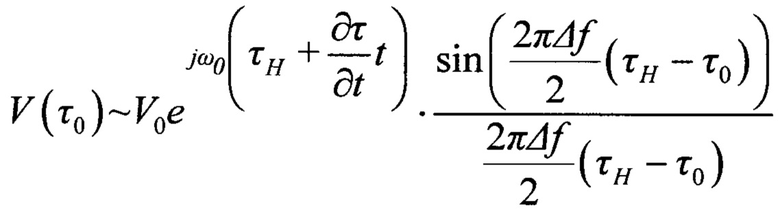 ,
,
где ω0=2πƒ0 - центральная частота приема, Δƒ - полоса приема, τ(е)=τн+β⋅t - время пространственной задержки между сигналами, приходящими на антенны, τн - задержка в начальный момент времени, β - коэффициент, определяемый скоростью движения объекта, τ0 - задержка, которая вводится для компенсации τ(t). Дискрет задержки определяется полосой приема Δτ=1/Δƒ, т.е. чем шире полоса приема, тем точнее определяется задержка.
Максимум КФ (и спектра) в системе координат «задержка - частота интерференции - амплитуда» соответствует значению компенсированных задержки τ и частоты интерференции, которые несут информацию о положении источника и скорости его движения.
Задача однозначного определения всех 3-х «мгновенных» пространственных координат объекта по измеренным задержкам решается измерительным комплексом, имеющим не менее четырех наземных приемных пунктов. Это обеспечивает получение трех независимых отсчетов пространственной разности хода и позволяет составить систему из трех уравнений, решение которой дает сразу все пространственные координаты объекта в момент времени отражения им зондирующего сигнала.
В предлагаемом способе радиолокации отсутствуют жесткие требования на взаимное расположение приемных антенн. Приемный антенный комплекс должен иметь суммарную эффективную площадь, достаточную для обнаружения интерферометром сигнала заданной интенсивности.
3) Применение нескольких (4 и более) разнесенных приемных антенн (станций) в локальном пункте (базовые расстояния до нескольких сотен метров) позволяет повысить вероятность обнаружения объекта в воздушном и околоземном пространстве, определить его координаты и параметры траектории полета. Применение нескольких (4-6) разнесенных многоантенных локальных пунктов (базовые расстояния до нескольких десятков и сотен километров) позволяет повысить вероятность обнаружения объекта в воздушном и околоземном пространстве, определить его координаты и параметры траектории полета.
Предложенный Способ радиолокации на основе многопозиционных систем передачи и приема, реализуется следующим образом.
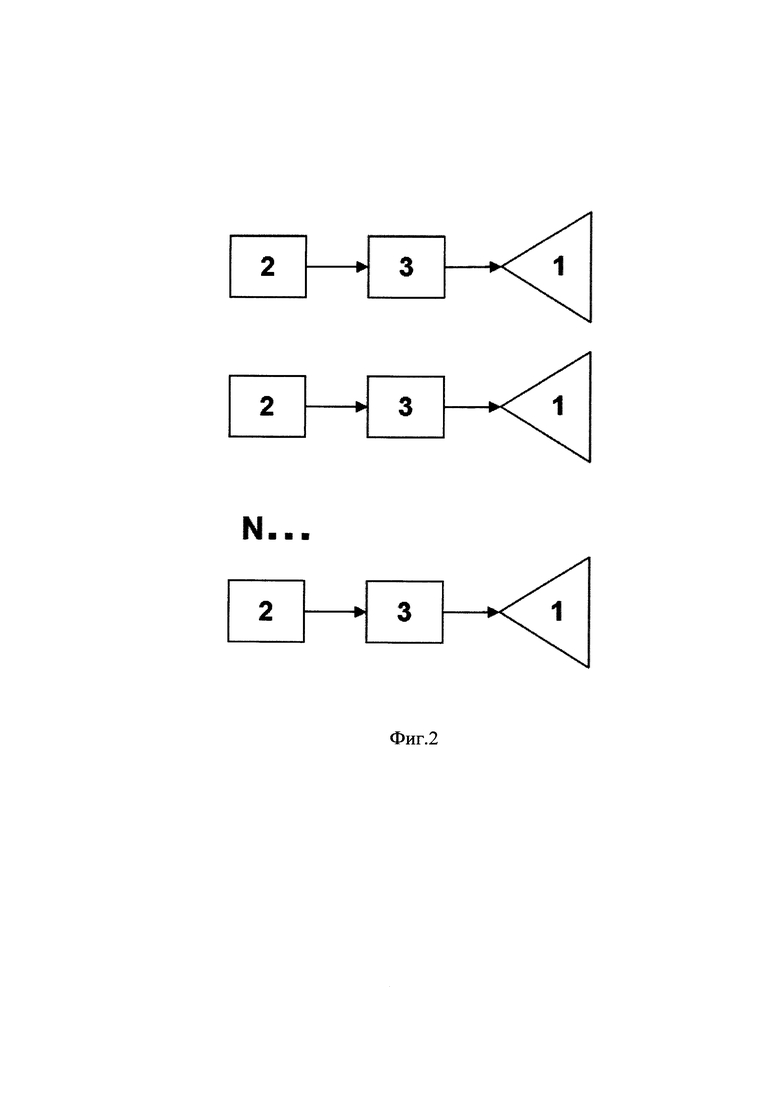
Передающий комплекс (фиг. 2) формируют из нескольких (N) станций, каждая из которых содержит генератор шумоподобного сигнала 2 с центральной частотой ƒn (n=1÷N), соединенный с усилителем мощности 3, с выхода которого широкополосный сигнал (ƒn±Δƒ/2) передается на антенну 1 и излучается в пространство в требуемом направлении.
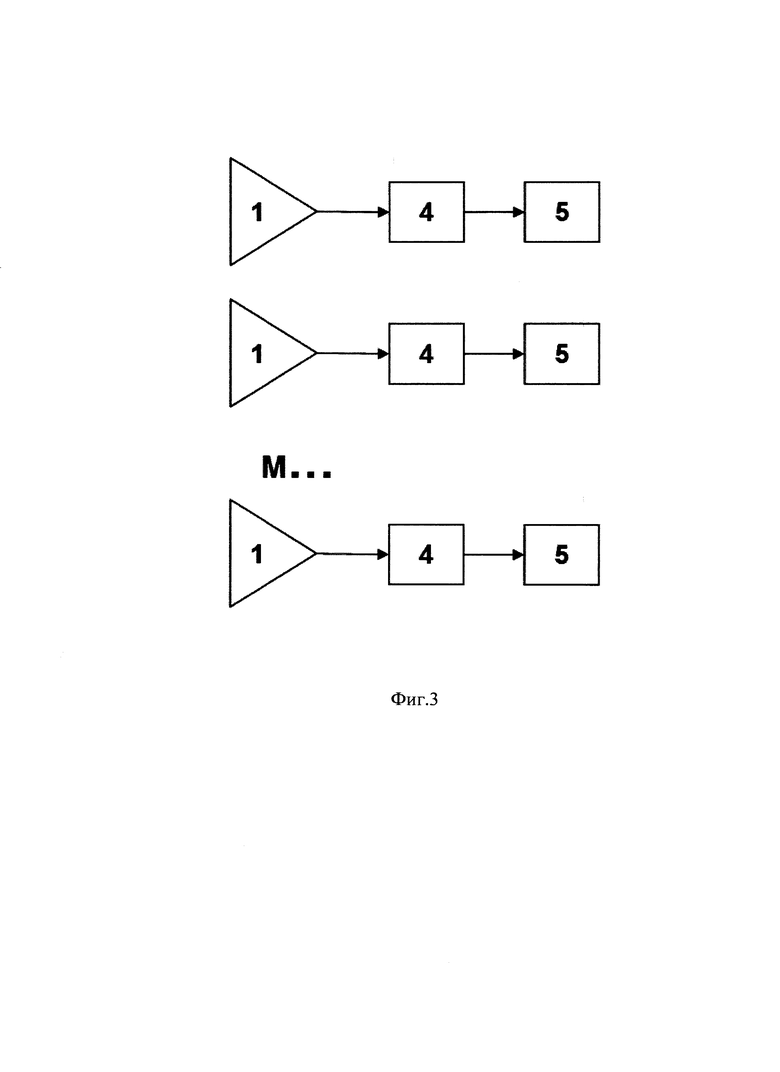
Вариант приемного комплекса (фиг. 3) формируют из нескольких (М) станций, каждая из которых содержит приемную антенну 1, с выхода которой сигнал поступает на одноканальный приемник 4 с частотной полосой (ƒ0±NΔƒ/2). Наличие сигнала от объекта фиксируется возрастанием уровня шума (выходного сигнала) регистрирующего устройства 5. Направление на источник отраженного сигнала (координаты) определяется по диаграмме направленности антенны (по отсчетным лимбам приводных систем антенны). При наличии двух и более приемных станций методом пеленгации определяется дальность до объекта, уточняются его координаты, скорость и направление движения.
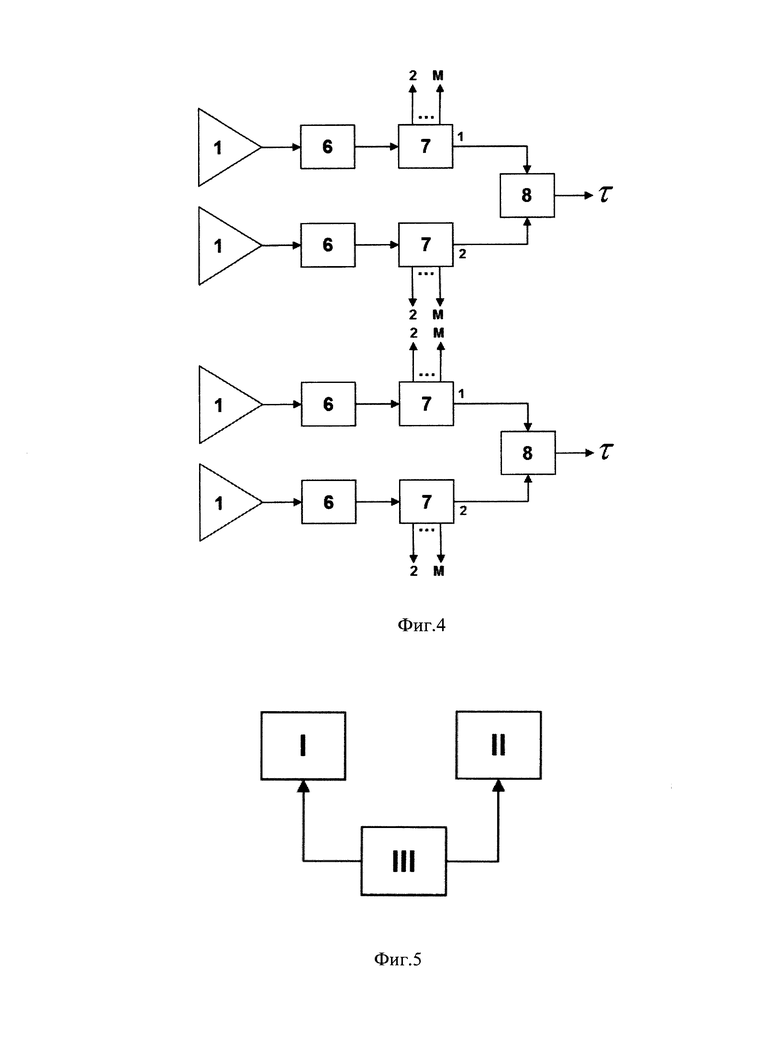
Вариант приемного комплекса (фиг. 4) формируют из нескольких (М) станций, каждая из которых содержит приемную антенну 1, с выхода которой сигнал поступает на одноканальный приемник 6 с частотной полосой (ƒ0±NΔƒ/2), переносится гетеродинированием на более низкую частоту, оцифровывается и в разветвителе 7 делится на М выходов. С выходов приемных устройств сигналы каждой пары антенн поступают на два входа корреляторов 8, результатом работы которых являются измеренная пространственная задержка сигналов и частота интерференции - исходные параметры для расчета координат и скорости движения объекта. М станций образуют локальный пункт приемной системы, аппаратура которого синхронизируется от общего стандарта частоты и времени по технологии радиоинтерферометрии со сверхдлинными базами.
Число как передающих, так и приемных антенн определяется требуемыми техническими характеристиками комплекса, исходя из решаемых радиолокационных задач. Поскольку предполагается применение маломощных генераторов, то число передающих антенн небольших габаритов может достигать нескольких десятков, геометрия расположения произвольна.
Управление и контроль работы ведется из общего пункта (фиг. 5, где I - передающая система, II - приемная система, III - пункт управления). Принцип работы и структура системы связи (кабельная, ОВЛС, радиорелейная) будет зависеть от технических характеристик радиолокационного комплекса, реализующего предложенный способ. Основная задача пункта управления - выдавать команды на начало и конец работы и указание координат зон обзора.
«Промышленная применимость» способа обусловлена наличием возможности реализовать его с использованием имеющегося технологического задела в области построения радиолокационных систем и известных методов математической обработки сигналов.
Сопоставление заявленного Способа радиолокации на основе многопозиционных систем передачи и приема и прототипа показывает, что заявленный способ существенно отличается от прототипа.
Общие признаки заявляемого способа и прототипа:
1. Размещают в пространстве передающие станции.
2. Оборудуют разнесенные в пространстве передающие станции генераторами зондирующего сигнала и антеннами.
3. Размещают в пространстве приемные станций.
4. Оборудуют размещенные в пространстве приемные станции приемниками сигналов, антеннами и системой обработки сигналов.
5. Излучают зондирующие сигналы.
6. Принимают отраженные зондирующие сигналы.
7. Производят обработку сигналов.
8. Определяют координаты и скорости движения объекта, от которого принят отраженный сигнал.
9. Передают оператору радиолокационного комплекса по каналу связи координаты и скорости обнаруженного объекта для его последующего сопровождения.
Отличительные признаки предлагаемого решения:
1. В качестве зондирующих сигналов используют шумоподобные сигналы на разных неперекрывающихся частотах в смежных полосах.
2. Зондирующие сигналы излучают с разнесенных в пространстве передающих станций с использованием при модуляции разных для каждого передатчика псевдослучайных последовательностей или одинаковой псевдослучайной последовательностью для всех передатчиков.
3. Отраженные от объекта сигналы принимают на приемных станциях в одноканальном или одноканальном интерферометрическом режиме в широкой полосе частот равной сумме неперекрывающихся смежных широких полос частот излученных зондирующих сигналов.
4. В одноканальном интерферометрическом режиме производят кросскорреляционную обработку принятых отраженных широкополосных сигналов для каждой пары приемных станций.
Таким образом, заявленный Способ радиолокации на основе многопозиционных систем передачи и приема, позволяет за счет использования многопозиционного излучения шумоподобных сигналов на неперекрывающихся частотах и их приема широкополосными одноканальными приемниками в полосе частот полученной суммой полос частот излученных широкополосных сигналов, позволяет добиться повышения дальности и надежности обнаружения воздушных и внеземных объектов (космического мусора, близких астероидов), а также повышения точности измерения координат и параметров траекторий полета объектов, что и является технической задачей изобретения.
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявляемого изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «Изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| ДВУХЧАСТОТНЫЙ КОГЕРЕНТНО-КОРРЕЛЯЦИОННЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2332681C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| СПОСОБ АКТИВНОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2498339C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ БОРТОВЫМ ОБНАРУЖИТЕЛЕМ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2709787C1 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |
Изобретение относится к радиолокации и может быть использовано в широкополосных многофункциональных радиолокационных системах СВЧ-диапазона, использующих шумоподобные сигналы, основной задачей которых является оценка и анализ радиолокационной обстановки, включающей в себя обзор заданной области пространства, поиск и обнаружение целей, определение их координат и уточнение параметров траектории полета. Технический результат заключается в повышении дальности и надежности обнаружения объектов в воздушном и околоземном космическом пространстве (космического мусора, близких астероидов). В заявленном способе применяют многоэлементное передающее устройство, формирующее зондирующий сигнал, представляющий собой сумму нескольких шумоподобных сигналов в нескольких широких смежных без перекрытия частотных полоса, каждый из которых излучается автономным передатчиком, и широкополосной приемной системы, состоящей из 2-х или более приемных элементов с заданной общей полосой пропускания, равной всему диапазону частот сформированного зондирующего сигнала, с использованием одноантенных приемных элементов в режиме регистрации шумоподобного сигнала, отраженного от объекта, или двухантенных приемных элементов в интерферометрическом режиме с корреляционной обработкой. 2 н.п. ф-лы, 5 ил.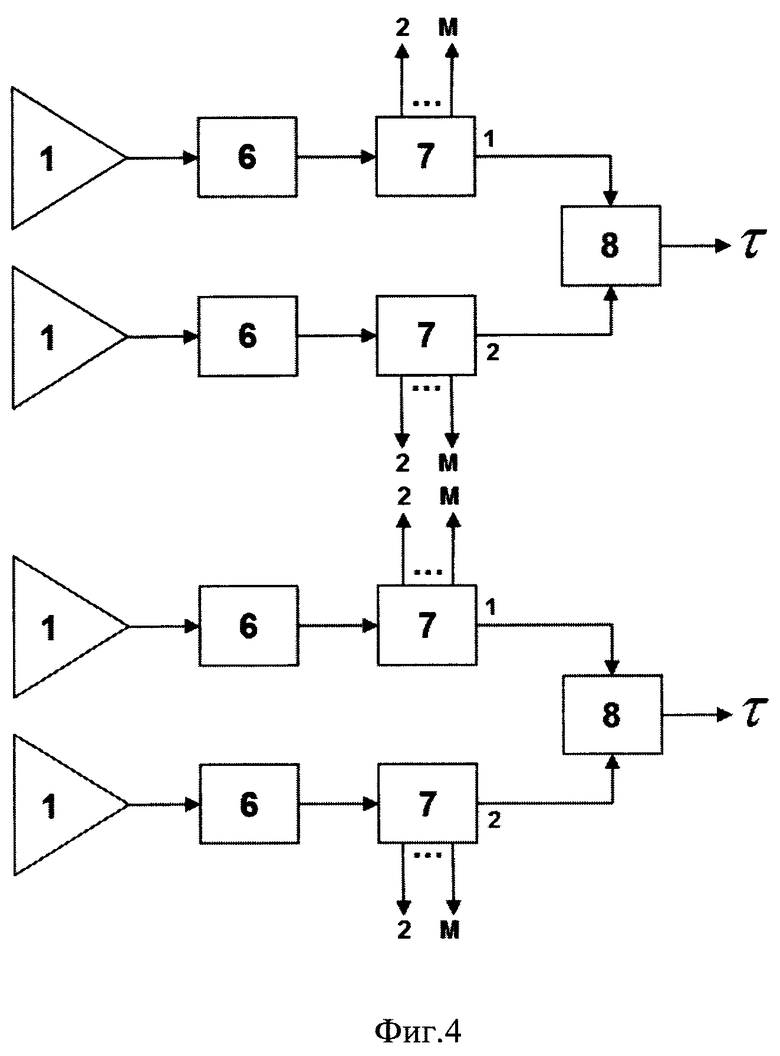
1. Способ радиолокации на основе многопозиционных систем передачи и приема для обнаружения, определения координат и параметров траектории полета объектов в воздушном и в ближнем космическом пространстве, отличающийся тем, что используют способ формирования широкой частотной полосы шумоподобного зондирующего сигнала, для чего размещают N разнесенных в пространстве передающих станций, каждая из которых содержит генератор шумоподобного зондирующего сигнала и антенну, излучающую зондирующий сигнал в своей частотной полосе, размещают в пространстве М, где М ≥ 2, автономных приемных станций, каждая из которых включает антенну, одноканальное приемное широкополосное устройство и систему регистрации сигналов, излучают шумоподобные зондирующие сигналы с разнесенных в пространстве передающих станций на разных частотах в смежных неперекрывающихся полосах без их синхронизации и фазировки, принимают на приемных станциях отраженный от объекта широкополосный сигнал в одноканальном режиме в широкой полосе, равной сумме неперекрывающихся смежных частотных полос излученных зондирующих сигналов, производят обработку сигналов, фиксируя наличие отраженного от объекта сигнала возрастанием уровня шума системой регистрации сигналов, определяют направление на источник отраженного от объекта сигнала и его координаты по диаграммам направленности антенн приемных станций, методом пеленгации определяют дальность до объекта, уточняют его координаты, скорость и направление движения.
2. Способ радиолокации на основе многопозиционных систем передачи и приема для обнаружения, определения координат и параметров траектории полета объектов в воздушном и в ближнем космическом пространстве, отличающийся тем, что используют способ формирования широкой частотной полосы шумоподобного зондирующего сигнала, для чего размещают N разнесенных в пространстве передающих станций, каждая из которых содержит генератор шумоподобного зондирующего сигнала и антенну, излучающую зондирующий сигнал в своей частотной полосе, размещают в пространстве М, где М ≥ 3, приемных станций, каждая из которых включает антенну и одноканальное приемное широкополосное устройство, излучают шумоподобные зондирующие сигналы с разнесенных в пространстве передающих станций на разных частотах в смежных неперекрывающихся полосах без их синхронизации и фазировки, принимают на приемных станциях отраженный от объекта широкополосный сигнал в одноканальном интерферометрическом режиме в широкой полосе, равной сумме неперекрывающихся смежных полос частот излученных зондирующих сигналов, формируют из М приемных станций локальный пункт приемной системы, аппаратура которого синхронизируется от общего стандарта частоты и времени по технологии радиоинтерферометрии со сверхдлинными базами, производят преобразование сигналов, при этом на каждой из приемных станций сигнал с выхода приемной антенны поступает на одноканальное приемное широкополосное устройство, переносится гетеродинированием на более низкую частоту, оцифровывается и делится на М выходов, проводят кросс-корреляционную обработку сигналов с выходов каждой пары приемных станций в одноканальном интерферометрическом режиме, в результате которой получают измеренные пространственные задержки сигналов и частоты интерференции, по которым рассчитывают координаты и скорость движения объекта.
| СВЕРХШИРОКОПОЛОСНЫЙ РАДИОЛОКАТОР С АКТИВНОЙ МНОГОЧАСТОТНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2016 |
|
RU2615996C1 |
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2402038C2 |
| ДВУХЧАСТОТНЫЙ КОГЕРЕНТНО-КОРРЕЛЯЦИОННЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2332681C2 |
| Сверхширокополосный многочастотный радиолокатор с активной фазированной антенной решеткой и пониженным уровнем боковых лепестков в сжатом сигнале | 2019 |
|
RU2727793C1 |
| US 11327168 B2, 10.05.2022 | |||
| WO 2010016029 A1, 11.02.2010 | |||
| Контейнерное рыбопромысловое судно-катамаран | 1979 |
|
SU893703A1 |
| US 10197664 B2, 05.02.2019. | |||

