Изобретение относится к радиолокации и может быть использовано для обработки сигналов при решении задачи обнаружения малозаметных целей в наземно-космических просветных радиолокационных системах (РЛС).
В настоящее время в авиационном секторе значительно возрастает доля беспилотных летательных аппаратов (БПЛА). Современные малозаметные БИЛА могут быть изготовлены по стелс-технологии, иметь сверхзвуковую максимальную скорость и практический потолок около 20 км. В отличие от многих самолетов, БПЛА, как правило, имеют значительно меньшие размеры, а следовательно, и меньшую эффективную площадь рассеяния, что затрудняет их обнаружение моностатическими радиолокаторами. Использование радиолокации «на просвет» позволяет снизить требуемый энергетический потенциал РЛС, необходимый для обнаружения таких целей. В случае использования наземно-космических просветных РЛС снимается ограничение по высоте обнаружения БПЛА, свойственное просветным РЛС с передающими и приемными позициями наземного и воздушного базирования, соответственно [1].
Актуальным является применение существующих космических аппаратов (КА) различного назначения (GPS/ГЛОНАСС, телекоммуникационные и т.д.) в качестве передающих постов просветной многопозиционной наземно-космической РЛС. Такая конфигурация позволяет существенно сократить материальные затраты, связанные с запуском новых спутников, и обеспечить скрытность работы такой системы, т.к. проектируется только приемная часть просветной РЛС.
При создании просветной РЛС необходимо обеспечить селекцию слабого рассеянного целью сигнала и сильного прямого сигнала передающей позиции. Конкретный способ селекции сигналов зависит от многих факторов, среди которых следует отметить вид зондирующего сигнала, конфигурацию антенной системы приемной позиции и чувствительность приемника.
Известна наземно-космическая РЛС [2, 3], содержащая передатчик космического или воздушного базирования, в качестве носителя которого используют спутник или летно-подъемные средства, и разнесенные радиолокационные приемные устройства, размещенные на вышках сотовой связи. Для выделения рассеянного сигнала применяется метод пространственной селекции путем применения дополнительных узконаправленных антенн, ориентируемых на заданный участок местности. К недостаткам такой просветной РЛС можно отнести необходимость использования дополнительных антенн и более высокие требования к энергетическому потенциалу, необходимому для обнаружения малозаметных целей, например целей, изготовленных по стелс-технологии.
Аналогичный вариант бистатической наземно-космической РЛС с группой наземных приемников рассмотрен в [4]. Теми же авторами в [5] предложен вариант наземно-космической РЛС, реализующий принцип радиолокации «на просвет». Для выделения рассеянного сигнала применяются высокочувствительные приемники в сочетании с методом временной селекции сигналов.
Известен другой просветный наземно-космический радиолокационный комплекс [6], где в качестве передающей позиции используются космические естественные или искусственные источники шумового сигнала, а приемная станция является наземной. Обеспечивается пространственная и временная селекция прямого и рассеянного сигналов.
К недостаткам аналогов [4, 5, 6] можно отнести необходимость использования высокочувствительных приемников и дополнительных антенн для приема рассеянного сигнала.
Наиболее близким аналогом предлагаемого устройства (прототипом) является наземно-космическая просветная РЛС [7], показанная на фиг. 1, состоящая из приемной, расположенной на космическом носителе, и наземной передающей позиций. Передающая позиция содержит последовательно включенные многочастотный передатчик 1 и передающую антенну 2, формирующую N парциальных лучей и осуществляющую излучение непрерывного квазигармонического зондирующего сигнала, являющегося суммой сигналов, имеющих разные несущие частоты.
В состав приемной позиции входит широкополосная приемная антенна 3, приемные каналы, количество которых равно количеству парциальных каналов передающей позиции, а также блок 8 определения пеленга. Каждый канал многоканальной по частоте приемной позиции состоит из последовательно соединенных высокочастотного полосового фильтра 4, приемника 5, устройства 6 режекции прямого сигнала передатчика и пассивных помех и блока 7 измерения доплеровской частоты. Причем выходы блоков 7 измерения доплеровской частоты каждого канала соединены с входами блока 8 определения пеленга. На приемной позиции формируется один «широкий» луч, который должен перекрывать зону пространства, облучаемую всеми лучами передатчика.
На приемной позиции обеспечивается частотная селекция прямого и рассеянного сигналов. Таким образом, в устройстве-прототипе [7] преодолены недостатки аналогов [4, 5, 6].
В системах [1, 7], использующих непрерывный квазигармонический зондирующий сигнал, спектры прямого и рассеянного сигналов оказываются разнесенными по оси частот. Благодаря этому использование узкополосного режекторного фильтра обеспечивает возможность подавления прямого сигнала до уровня собственного шума, как показано на фиг. 2, где 1 - спектральные компоненты прямого сигнала, 2 - спектральные компоненты рассеянного целью сигнала, 3 - амплитудно-частотная характеристика режекторного фильтра, F0 - центральная частота прямого сигнала, FдЦ - частота Доплера цели.
Существующие навигационные и телекоммуникационные спутники излучают непрерывный сигнал с цифровой фазовой модуляцией, цифровой амплитудно-фазовой модуляцией, цифровой частотной модуляцией, ширина спектра которого значительно превосходит величину доплеровского сдвига частоты рассеянного воздушной целью сигнала, в связи с чем использование режекторного фильтра не позволяет подавить прямой сигнал, не подавив при этом рассеянный сигнал, т.к. спектральные компоненты прямого и рассеянного сигналов будут практически полностью перекрываться. На фиг. 3 проиллюстрирована эта ситуация, где 1 - спектральные компоненты прямого сигнала, 2 - спектральные компоненты рассеянного целью сигнала.
Первым недостатком прототипа является необходимость запуска специальных спутников, что повышает стоимость системы в целом. Второй недостаток состоит в том, что применяемый в прототипе метод частотной селекции сигналов рассчитан только на непрерывный квазигармонический зондирующий сигнал, а сигналы существующих КА, являясь непрерывными, имеют цифровую модуляцию и не являются квазигармоническими. Кроме того, в прототипе необходимо использовать многочастотный передатчик и многочастотные антенны, что усложняет конструкцию антенно-фидерных узлов и увеличивает массогабаритные показатели.
Техническим результатом предлагаемого изобретения является снижение стоимости наземно-космической просветной РЛС в целом, не требующей запуска новых спутников, с одновременным упрощением конструкции антенно-фидерных узлов, снижением массогабаритных показателей и повышением скрытности просветной РЛС.
Упрощение конструкции антенно-фидерных узлов и снижение массогабаритных показателей достигается тем, что не требуются различные антенны для приема прямого и рассеянного сигналов, многочастотные приемопередающие модули, высокочувствительные приемники.
Повышение скрытности предлагаемой просветной РЛС достигается путем использования в качестве зондирующего непрерывного сигнала с цифровой модуляцией, ширина спектра которого значительно превышает диапазон возможных доплеровских сдвигов частоты при отражении от обнаруживаемых целей.
Для достижения указанного технического результата в устройстве, содержащем передающую позицию в составе передатчика и антенны, приемную позицию, в состав которой входят приемная антенна, N приемников, N блоков измерения доплеровской частоты с подключенными выходами к N входам блока определения пеленга, выход которого является выходом устройства, введено на приемной позиции между каждым приемником и блоком измерения доплеровской частоты устройство обработки сигналов, содержащее последовательно соединенные демодулятор, когерентный накопитель, генератор прямого сигнала и блок вычитания, а также линию задержки, вход которой соединен с выходом приемника, а выход - со вторым входом блока вычитания, причем передающая позиция расположена в космосе, излучает непрерывный сигнал с цифровой модуляцией и формирует один «широкий» луч, перекрывающий всю зону обзора, а на наземной приемной позиции сформировано N парциальных лучей.
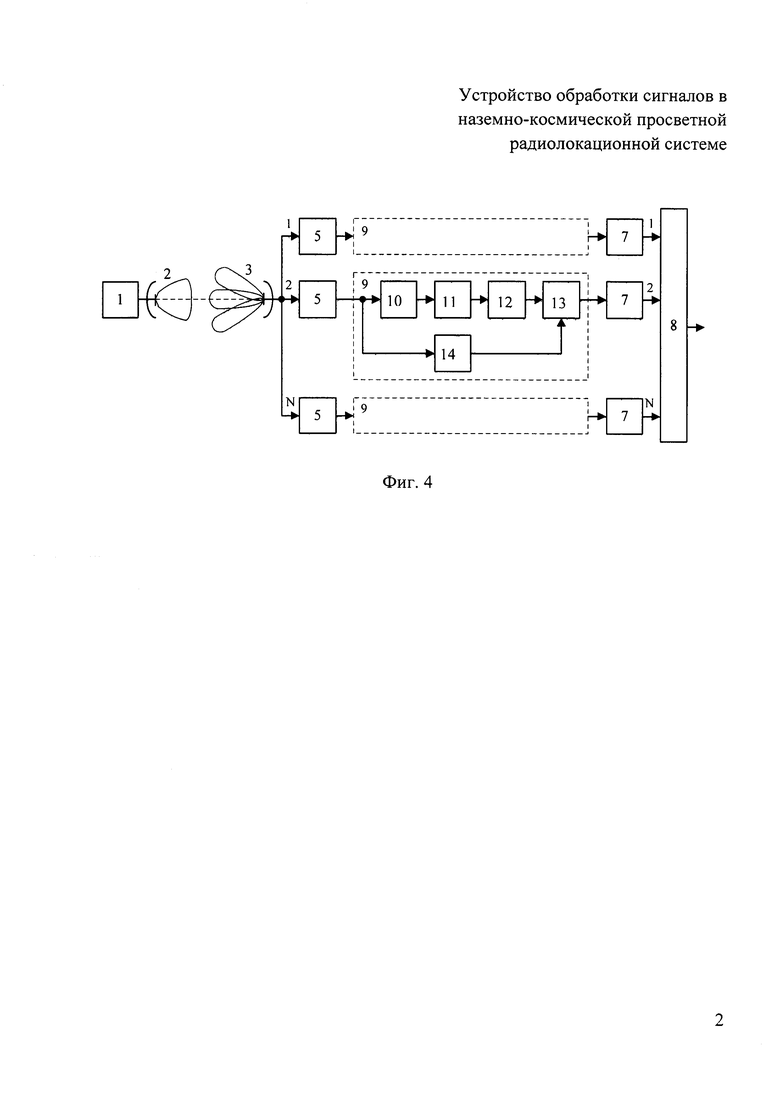
На фиг. 4 приведена функциональная схема заявляемого устройства, где приняты следующие обозначения:
1 - передатчик;
2 - антенна передающей позиции;
3 - антенна приемной позиции;
5 - приемник;
7 - блок измерения доплеровской частоты;
8 - блок определения пеленга;
9 - устройство обработки сигналов;
10 - демодулятор;
11 - когерентный накопитель;
12 - генератор прямого сигнала;
13 - блок вычитания;
14 - линия задержки.
Предлагаемое устройство состоит из наземной приемной позиции, относительно которой происходят измерения первичных параметров, и передающей позиции, в качестве которой используется существующий КА, работающий в штатном режиме. Передающая позиция содержит передатчик 1 и антенну передающей позиции 2. Приемная наземная позиция состоит из антенны 3, приемных каналов, число которых равно числу парциальных лучей приемной позиции, и блока определения пеленга 8. Каждый приемный канал состоит из последовательно соединенных приемника 5 и устройства обработки сигналов 9. Устройство обработки сигналов 9 состоит из демодулятора 10, когерентного накопителя 11, генератора прямого сигнала 12, блока 13 вычитания, при этом выход приемника 5 соединен также с входом линии задержки 14, выход которой соединен со вторым входом блока 13 вычитания. Выход блока 7 измерения доплеровской частоты каждого канала приемной позиции соединен с соответствующим входом блока 8 определения пеленга.
Заявляемое устройство работает следующим образом.
В качестве передающей позиции, состоящей из передатчика 1 и антенны 2 передающей позиции, используется существующий КА, на котором формируется один «широкий» луч диаграммы направленности. На наземной приемной позиции формируются N парциальных лучей диаграммы направленности на одной частоте. Прямой сигнал и сигнал, рассеянный целью, принимаются одновременно несколькими парциальными лучами в пространстве и на вход приемных каналов поступает суммарное колебание. Суммарный сигнал соответствует одной цели.
Из приемника 5 суммарный сигнал поступает на демодулятор 10 устройства обработки сигналов 9. Поскольку мощность рассеянного сигнала на несколько порядков меньше по сравнению с мощностью прямого сигнала, то можно пренебречь влиянием рассеянного сигнала при демодуляции прямого. Полученная оценка последовательности информационных символов позволяет выполнить когерентное накопление прямого сигнала в когерентном накопителе 11. При когерентном накоплении прямого сигнала и его компенсации необходимо обеспечить разрешение по частоте Доплера между прямым сигналом и рассеянным для исключения частичного подавления рассеянного сигнала. Для этого интервал накопления прямого сигнала выбран таким, чтобы его область высокой корреляции была меньше требуемой разрешающей способности по частоте Доплера рассеянного сигнала. После когерентного накопления производится оценка амплитуды и начальной фазы. Полученной информации о прямом сигнале достаточно, чтобы синтезировать его локальную копию в генераторе прямого сигнала 12, которая затем вычитается из задержанного суммарного сигнала в блоке 13 вычитания. Линия задержки 14 обеспечивает задержку суммарного сигнала как минимум на величину интервала когерентного накопления прямого сигнала. В блоке 7 измерения доплеровской частоты каждого канала определяется частота Доплера рассеянного целью сигнала. Определение угловых координат цели в блоке 8 определения пеленга происходит путем сравнения амплитуд сигналов от одной и той же цели в разных приемных каналах.
Таким образом, введение в известное устройство, содержащее передающую позицию в составе передатчика и антенны, приемную позицию, в состав которой входят приемная антенна, N приемников, N блоков измерения доплеровской частоты с подключенными выходами к N входам блока определения пеленга, выход которого является выходом устройства, последовательно соединенных демодулятора, когерентного накопителя, генератора прямого сигнала, блока вычитания, а также линии задержки на приемной позиции между каждым приемником и блоком измерения доплеровской частоты, вход линии задержки соединен с выходом приемника, а выход - со вторым входом блока вычитания, причем передающая позиция, расположенная на существующем КА, излучает непрерывный сигнал с цифровой модуляцией и формирует один «широкий» луч, перекрывающий всю зону обзора, а приемная позиция наземного базирования формирует N парциальных лучей, что обеспечивает создание устройства обработки сигналов в наземно-космической просветной РЛС, не требующего запуска новых спутников, с одновременным упрощением конструкции антенно-фидерных узлов, снижением массогабаритных показателей и повышением скрытности просветной РЛС.
Источники информации
1. Патент РФ №2324951 «Наземно-космический радиолокационный комплекс», опубл. 20.05.2008, МПК G01S 13/06, Н04В 7/24, авторы А.Б. Бляхман, А.В. Самарин.
2. Ксендзук, А.В. Неизлучающая радиолокационная система, основанная на приеме отраженных сигналов навигационных систем ГЛОНАСС и GPS [Текст] / А.В. Ксендзук, В.Ф. Фатеев, С.А. Попов // Труды ОАО «МАК «Вымпел». Сборник статей. М.: Радиотехника, 2009 - №4 - С. 60-66.
3. Патент РФ №113022 «Наземно-космическая радиолокационная система», опубл. 27.01.2012, МПК G01S 13/06, авторы В.Ф. Фатеев, А.В. Ксендзук.
4. Патент РФ №109569 «Устройство обнаружения воздушных целей с использованием сигналов спутниковых радионавигационных систем», опубл. 20.10.2011, МПК G01S 5/02, G01S 13/56, авторы В.В. Кирюшкин, Д.А. Черепанов, А.А. Дисенов, С.С. Ткаченко.
5. Кирюшкин, В.В. Оценка возможности регистрации рассеянных воздушной целью сигналов спутниковых навигационных систем современными и перспективными приемниками [Текст] / В.В. Кирюшкин, Д.А. Черепанов, Н.М. Тихомиров // Сборник докладов XVII Международной научно-технической конференции «Радиолокация, навигация, связь» - НПФ «САКВОЕЕ», Воронеж, 2011 - 12-14 апреля - Том 3 - С. 2119-2124.
6. Патент РФ №2422849 «Радиолокационный комплекс», опубл. 27.06.2011, МПК G01S 13/02, авторы А.А. Антипенко, А.Ф. Дементьев, Н.А. Дугин и др.
7. Патент РФ №2402034 «Радиолокационный способ определения углового положения цели и устройство для его реализации», опубл. 20.10.2010, МПК G01S 3/72, авторы А.Б. Бляхман, А.В. Самарин, А.Г. Рындык, А.В. Мякиньков.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324197C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2422849C1 |
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |

Изобретение относится к радиолокации и может быть использовано для обработки сигналов при решении задачи обнаружения малозаметных целей в наземно-космических просветных радиолокационных системах (РЛС). Техническим результатом предлагаемого изобретения является снижение стоимости наземно-космической просветной РЛС в целом, не требующей запуска новых спутников, с одновременным упрощением конструкции антенно-фидерных узлов, снижением массогабаритных показателей и повышением скрытности просветной РЛС. Упрощение конструкции антенно-фидерных узлов и снижение массогабаритных показателей достигается тем, что не требуются различные антенны для приема прямого и рассеянного сигналов, многочастотные приемопередающие модули, высокочувствительные приемники. Повышение скрытности предлагаемой просветной РЛС достигается путем использования в качестве зондирующего непрерывного сигнала с цифровой модуляцией, ширина спектра которого значительно превышает диапазон возможных доплеровских сдвигов частоты при отражении от обнаруживаемых целей. Для достижения указанного технического результата в устройстве, содержащем передающую позицию в составе передатчика и антенны, приемную позицию, в состав которой входят приемная антенна, N приемников, N блоков измерения доплеровской частоты с подключенными выходами к N входам блока определения пеленга, выход которого является выходом устройства, введено на приемной позиции между каждым приемником и блоком измерения доплеровской частоты устройство обработки сигналов, содержащее последовательно соединенные демодулятор, когерентный накопитель, генератор прямого сигнала и блок вычитания, а также линию задержки, вход которой соединен с выходом приемника, а выход - со вторым входом блока вычитания, причем передающая позиция расположена в космосе, излучает непрерывный сигнал с цифровой модуляцией и формирует один «широкий» луч, перекрывающий всю зону обзора, а на наземной приемной позиции сформировано N парциальных лучей. 4 ил.
Устройство обработки сигналов в наземно-космической просветной радиолокационной системе, содержащее передающую позицию в составе передатчика и антенны, приемную позицию, в состав которой входят приемная антенна, N приемников, N блоков измерения доплеровской частоты с подключенными выходами к N входам блока определения пеленга, выход которого является выходом устройства, отличающееся тем, что передающая позиция расположена в космосе, излучает непрерывный сигнал с цифровой модуляцией и формирует один «широкий» луч, перекрывающий всю зону обзора, а на наземной приемной позиции сформировано N парциальных лучей, кроме того, на приемной позиции между каждым приемником и блоком измерения доплеровской частоты дополнительно введены последовательно соединенные демодулятор, когерентный накопитель, генератор прямого сигнала и блок вычитания, а также введена линия задержки, вход которой соединен с выходом приемника, а выход - со вторым входом блока вычитания.
| СПОСОБ МОНОИМПУЛЬСНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 1992 |
|
RU2033627C1 |
| Смирнова Д.М | |||
| Обнаружение и измерение координат движущихся назмных объектов в многопозиционной просветной радиолокационной системе | |||
| Автореферат диссертаци на соискание учёной степени кандидата технических наук | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| US7071868 B2, 04.07.2006 | |||
| JP2002054946 A, 20.02.2002. | |||

