Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к тормозам и, в частности, к тормозам подъемной машины, включающим пьезоэлектрический привод тормоза.
Уровень техники
Подъемные системы используются повсеместно. Типичная конфигурация включает кабину подъемника, которая перемещается между площадками этажей в здании, например, для перевозки пассажиров или груза между разными этажами здания. Подъемная машина с двигателем перемещает узел каната или ремня, который обычно поддерживает кабину и перемещает ее в шахте подъемника.
Подъемная машина включает вал подъемной машины, который приводится во вращение двигателем. На валу подъемной машины обычно закреплен шкив, который вращается вместе с валом. Канаты или ремни движутся по шкиву таким образом, что при вращении шкива силовым механизмом в одном направлении кабина опускается, а при вращении шкива в другом направлении кабина поднимается. Подъемная машина обычно включает тормоз с электромагнитным приводом. Тормоз захватывает диск или фланец, вращающийся вместе с валом подъемной машины, удерживая неподвижно вал подъемной машины и шкив, когда кабина останавливается на заданной площадке.
В процессе работы тормоз с электромагнитным приводом может включаться или выключаться, с тем чтобы, соответственно, захватывать или освобождать диск или фланец, соединенный с валом подъемной машины. Включение и выключение тормоза с электромагнитным приводом часто создает нежелательный шум, когда тормоз соприкасается с диском или фланцем для приложения тормозящей силы. Кроме того, тормоз с электромагнитным приводом может быть довольно громоздким и дорогим, может выделять много тепла, и для его надлежащей работы могут требоваться дополнительные вспомогательные компоненты. Примером такого вспомогательного прибора может служить датчик расстояния для определения положения тормоза. Подобные компоненты увеличивают стоимость известных тормозов с электромагнитным приводом и усложняют их обслуживание.
Требуется менее шумный, более простой и компактный тормоз для подъемной машины. Настоящее изобретение направлено на решение этой задачи и обеспечивает улучшение эксплуатационных характеристик и одновременно лишено недостатков известных конструкций.
Раскрытие изобретения
Используемое в качестве примера тормозное устройство подъемной машины заданным образом меняет величину тормозящей силы, прилагаемой к вращающейся части подъемной машины, управляя воздействием на деформируемый материал привода тормоза, который управляет сцеплением между тормозным элементом и вращающейся частью.
В одном из вариантов, подъемная машина содержит двигатель, который приводит во вращение вал подъемной машины. Тормоз подъемной машины прилагает тормозящую силу к диску, соединенному с валом подъемной машины, для управления движением кабины, замедляя или останавливая вращение вала подъемной машины. В одном из вариантов подъемная машина включает смещающий элемент, прикладывающий усилие смещения, вызывающее сцепление между тормозным элементом и диском. Привод тормоза противодействует усилию смещения, обеспечивая, при необходимости, движение диска и вала.
В одном из вариантов привод тормоза перемещается между различными положениями торможения. Контроллер управления устанавливает несколько различных положений торможения и задает входное воздействие на привод тормоза.
В другом варианте положение привода тормоза определяется с учетом по крайней мере одного из факторов - воздействия на привод тормоза или электрического выходного сигнала с привода тормоза. В контроллере управления для определения положения привода тормоза и тем самым положения тормозного элемента относительно вращающейся части используется электрический входной сигнал, измеренное напряжение на батарее пьезоэлектрических элементов или и то и другое.
Различные признаки и преимущества настоящего изобретения будут очевидны специалистам при ознакомлении с приведенным ниже подробным описанием предпочтительных вариантов выполнения. Чертежи, иллюстрирующие подробное описание, могут быть вкратце охарактеризованы следующим образом.
Краткое описание чертежей
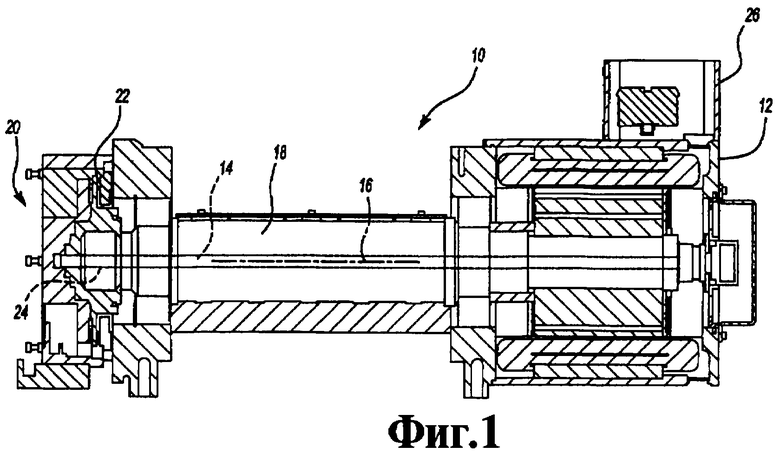
На Фиг.1 представлен вид поперечного сечения варианта выполнения подъемной машины.
На Фиг.2 представлен схематический вид фрагмента поперечного сечения отдельных частей тормозной секции подъемной машины, показанной на Фиг.1, в одном из рабочих положений.
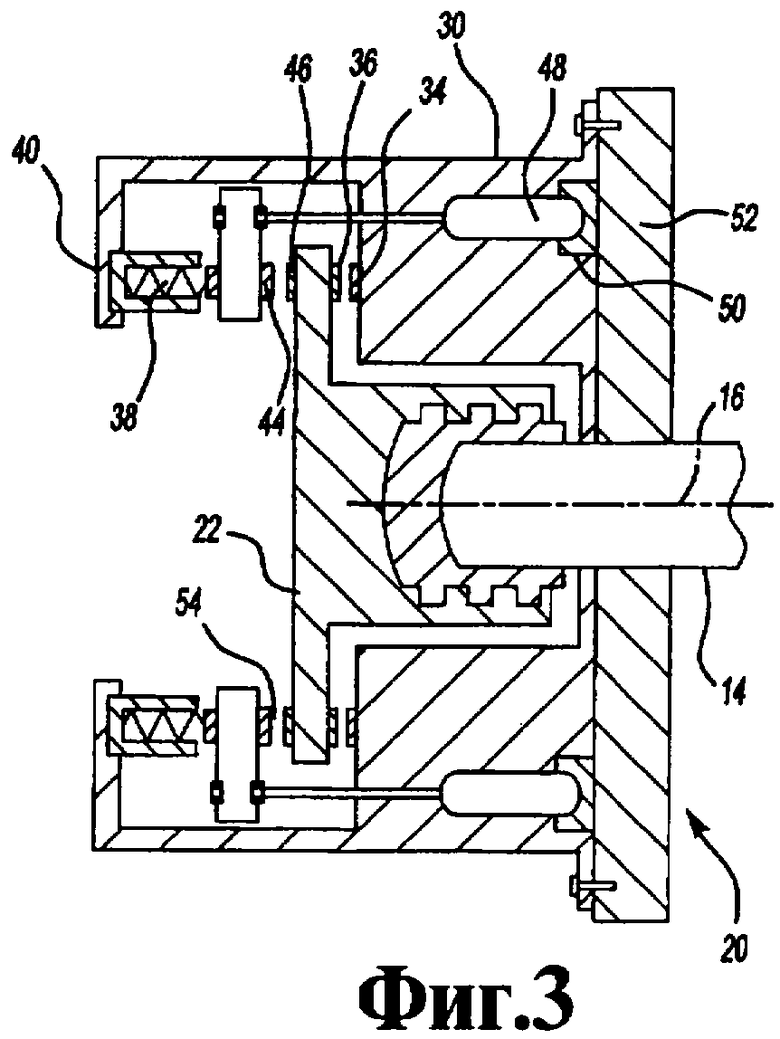
На Фиг.3 представлен схематический вид фрагмента поперечного сечения, аналогичный виду на Фиг.2, но иллюстрирующий другое рабочее положение.
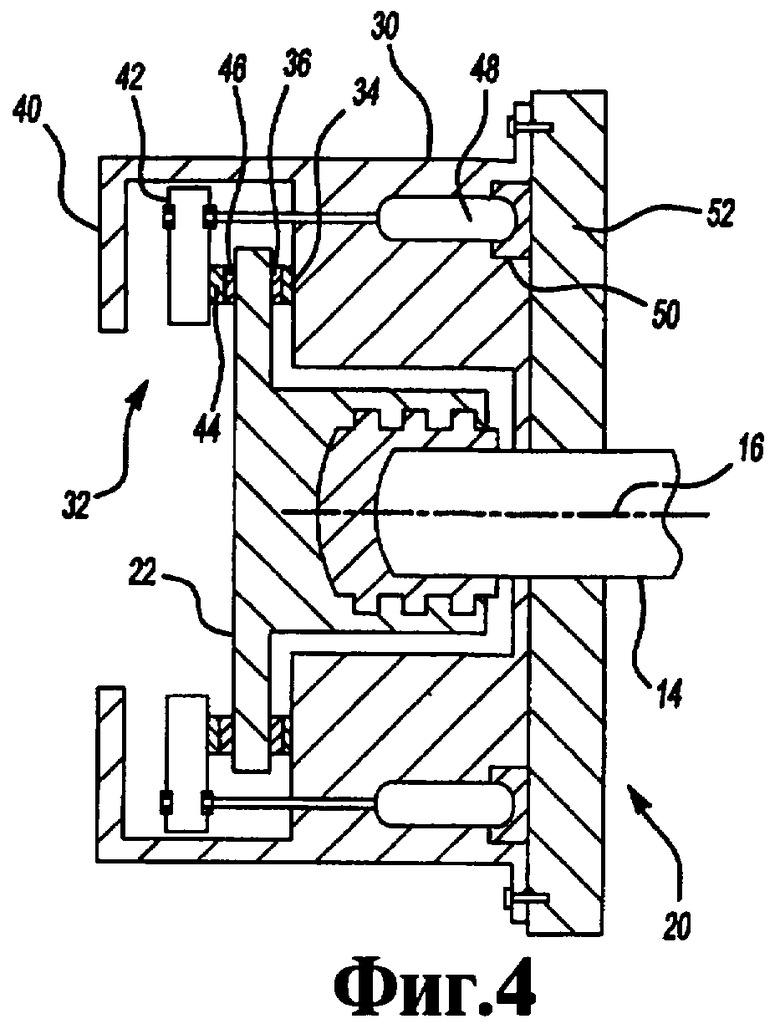
На Фиг.4 представлен схематический вид фрагмента поперечного сечения отдельных частей другого варианта тормоза подъемной машины.
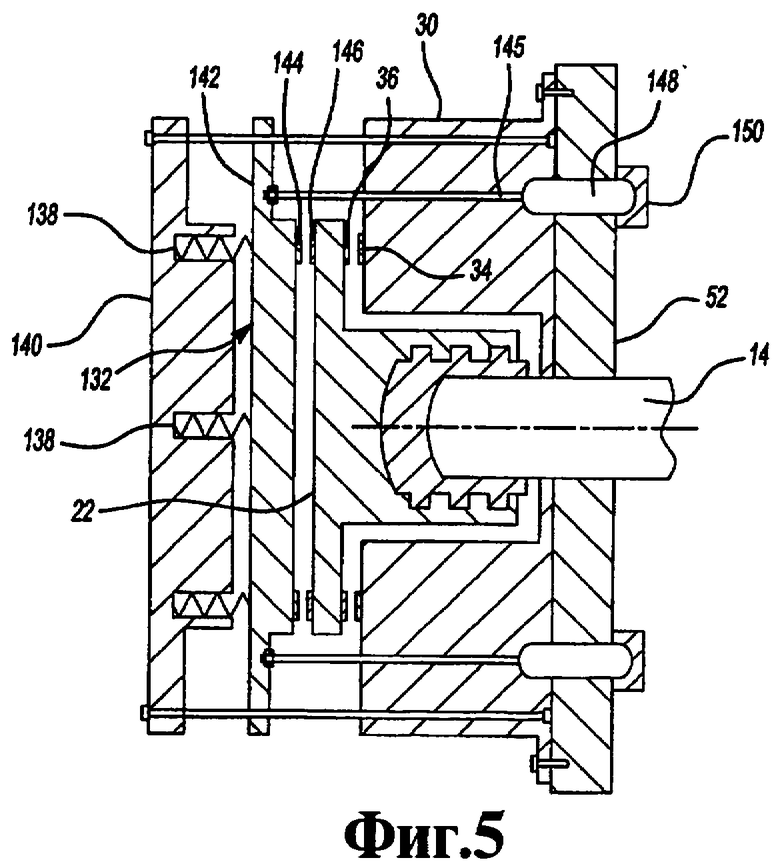
На Фиг.5 представлен схематический вид фрагмента поперечного сечения отдельных частей другого варианта выполнения тормоза подъемной машины.
Осуществление изобретения
На Фиг.1 представлен вид поперечного сечения варианта выполнения подъемной машины 10, содержащей двигатель 12, который приводит во вращение вал 14 подъемной машины вокруг оси 16. Шкив 18 вращается вместе с валом 14 подъемной машины вокруг оси 16. Тормоз 20 подъемной машины при необходимости прикладывает тормозящую силу к диску 22, который соединен с концом 24 вала 14 подъемной машины для замедления или остановки вращения вала 14 механизма. Известно, что такая машина (то есть двигатель и тормоз) управляет положением или движением кабины в шахте подъемника.
Контроллер 26 управляет двигателем 12 и тормозом 20 подъемной машины. Контроллер 26 может быть объединен с машиной 10 либо может быть расположен отдельно от подъемной машины 10. В одном из вариантов контроллер 26 заданным образом управляет подачей энергии к двигателю 12 и заданным образом изменяет тормозящую силу, которую тормоз 20 подъемной машины прикладывает к диску 22.
На Фиг.2 показан пример выполнения тормоза 20. Показанный тормоз включает корпус 30, к которому крепится тормозной механизм 32 клещевого типа. Представленный для примера тормоз 20 включает тормозную накладку 34, которая входит во фрикционное сцепление с первой тормозной поверхностью 36 на диске 22 для приложения тормозящей силы к диску 22. Клещевой механизм 32 включает смещающий элемент 38, например пружину, установленную в неподвижном рычаге 40 клещевого механизма. Смещающий элемент 38 соединен с тягой 42. Тяга 42 содержит тормозную накладку 44 клещевого тормоза, которая входит во фрикционное сцепление со второй тормозной поверхностью 46 на диске 22.
Тяга 42 функционально связана с приводом 48 тормоза, который по крайней мере частично крепится в корпусе 50 привода. Корпус 50 привода установлен на неподвижной части тормоза или узла 52 подъемной машины.
Смещающий элемент 38 прикладывает смещающее усилие к тяге 42, которая толкает накладку 44 клещевого тормоза в сторону второй тормозной поверхности 46, а диск 22 в сторону тормозной накладки 34, создавая тормозящую силу с обеих сторон диска 22. На Фиг.2 устройство показано в полностью заторможенном состоянии.
В одном из вариантов приложенное воздействие, например электрическое поле, электрический ток, напряжение или магнитное поле, управляет приводом 48 тормоза таким образом, что он смещает тягу 42, противодействуя смещающему усилию, уменьшая или полностью прекращая воздействие тормозящей силы на диск 22, как это показано на Фиг.3. В нормальном состоянии смещающее усилие создает тормозящую силу, приложенную к диску 22. Управляя воздействием на привод 48 тормоза, можно управлять величиной перемещения тяги 42 и тем самым величиной тормозящей силы.
Показанный привод 48 тормоза содержит известный деформируемый материал, который изменяет форму в соответствии с заданным воздействием. Изменение формы не обязательно является изменением геометрической формы. Напротив, кристаллическая или молекулярная структура материала известным образом изменяет форму в ответ на приложенное воздействие. Подобное изменение формы часто выражается в удлинении или сжатии материала в приводе 48.
В одном из примеров выполнения материал привода 48 тормоза расширяется в ответ на приложенное воздействие, смещая тягу 42, противодействуя при этом смещающему усилию, снижая или полностью исключая действие тормозящей силы на диск 22. При снятии воздействия материал сжимается, и смещающее усилие прикладывает тормозящую силу к диску 22.
В другом примере выполнения материал расширяется, прикладывая тормозящую силу.
В одном из вариантов деформируемый материал привода 48 тормоза представляет собой известный пьезоэлектрический материал. Известно, что пьезоэлектрический материал изменяет форму при электрическом воздействии, например воздействии электрического тока или напряжения. Изменение формы пропорционально величине электрического воздействия, и изменение может иметь положительный или отрицательный знак (то есть расширение в заданном направлении или сжатие в заданном направлении) в зависимости от полярности электрического воздействия.
В другом варианте деформируемый материал привода 48 тормоза представляет собой известный магнитострикционный материал. Известно, что магнитострикционный материал изменяет форму под воздействием магнитного поля. Обычно изменение формы пропорционально величине магнитного поля. Изменение формы может иметь положительный или отрицательный знак (то есть расширение в заданном направлении или сжатие в заданном направлении) в зависимости от направления действия магнитного поля.
В других вариантах используются электрострикционные материалы, изменение которых в ответ на электрическое воздействие носит управляемый или периодический характер. Известен ряд таких материалов.
Одним из преимуществ использованного в качестве примера привода 48 тормоза является относительная компактность привода 48 тормоза по сравнению с электромагнитными приводами. Благодаря малому размеру привода 48 тормоза он занимает меньше места в конструкции тормоза 20, он также потребляет меньше энергии и имеет больший срок службы. Кроме того, благодаря меньшему весу привода 48 тормоза снижается общий вес тормоза 20 по сравнению с известными конструкциями тормозов подъемных систем.
Привод, использующий деформируемый материал, обладает преимуществами по сравнению с электромагнитными приводами, применяемыми в известных тормозах подъемных механизмов. Например, привод 48 с деформируемым материалом обеспечивает прецизионное управление величиной тормозящей силы. Это позволяет избежать шумов, связанных с известными конструкциями, где тормозные накладки либо полностью прижаты, либо полностью освобождены, с отсутствием возможности постепенного управления между этими положениями. Известно, что величина воздействия (например, электрическим током), приложенного к деформируемому материалу, например батарее пьезоэлектрических элементов, изменяет размер батареи (то есть вызывает расширение или сжатие). В примере, приведенном на Фиг.2 и 3, средство 26 управления с высокой точностью управляет тормозящими силами путем прецизионного управления воздействием на привод 48.
В одном из вариантов привод 48 тормоза перемещает тягу 42 между несколькими различными положениями торможения. Несколько различных положений торможения соответствуют различным воздействиям на привод 48 тормоза. В одном из примеров средство 26 управления определяет начальную тормозящую силу при торможении и приводит в действие привод 48 тормоза посредством соответствующего воздействия на привод 48 тормоза, с тем чтобы создать требуемую тормозящую силу, приложенную к диску 22. Если начальная тормозящая сила недостаточна для замедления или остановки вращающегося вала 14 подъемной машины при приближении кабины к точке назначения, средство управления определяет вторую, большую тормозящую силу и изменяет воздействие для создания этой большей тормозящей силы. Подобное постепенное воздействие тормоза снижает шум и повышает комфорт пассажиров и качество перевозки. Такое постепенное воздействие тормоза было невозможно с ранее используемыми известными приводами.
В другом примере средство 26 управления заданным образом изменяет тормозящую силу для постепенного наращивания или уменьшения тормозящей силы, приложенной к диску 22. Благодаря изменению заданным образом тормозящей силы можно понизить уровень шума в тормозе 20 подъемной машины и обеспечить более плавное движение кабины подъемника.
По сравнению с известными тормозами подъемной машины при использовании привода 48 тормоза из приведенного примера возможно уменьшить зазор 54 между тормозными накладками 36, 46 и тормозными поверхностями на диске 22, что дает дальнейшее снижение шума сжатия, возникающего в противном случае при взаимодействии между тормозными накладками 34, 44 и диском 22.
В других вариантах средство 26 управления заданным образом меняет тормозящую силу при возникновении аварийной ситуации. Аварийные ситуации могут возникать, например, при свободном падении кабины подъемника. Заданным воздействием на привод 48 тормоза тяга 42 смещается в направлении воздействия смещающего усилия, складываясь со смещающим усилием и постепенно прикладывая дополнительную аварийную тормозящую силу к диску 22 в ситуации свободного падения. Управление этого типа снижает дискомфорт пассажиров, поскольку известные устройства аварийной остановки не в состоянии постепенно изменять тормозящую силу, а описываемые приводы 48 позволяют это делать.
Воздействие на привод 48 тормоза с положительным или отрицательным знаком может быть также использовано для перемещения тяги 42 для ее освобождения при ее заклинивании в зажатом или освобожденном положении. Например, положительное напряжение может быть использовано при обычном торможении. Если тормоз заклинило в зажатом положении, то может быть применено воздействие отрицательным напряжением для получения обратной реакции деформируемого материала для освобождения компонентов тормоза. Используя таким образом приводы 48, можно снизить потребность в обслуживании, требующем участие персонала.
Другой особенностью раскрытых примеров выполнения является то, что приводы 48 дают информацию о положении компонентов тормоза. Этим устраняется необходимость в использовании дополнительных датчиков положения.
Состояние привода 48 тормоза и, таким образом, положение тяги 42 и тормозных накладок относительно диска 22 в одном из вариантов определяется на основе по крайней мере одного заданного воздействия на привод 48 тормоза или измеряемого выходного сигнала с привода 48 тормоза. В одном из вариантов привод 48 тормоза включает пьезоэлектрический материал, а средство 26 управления использует электрическое воздействие или электрический выходной сигнал, например уровень напряжения с пьезоэлектрического материала, для определения положения тяги 42 относительно диска 22. При этом входное воздействие или выходной сигнал определенной величины соответствуют определенному состоянию пьезоэлектрического материала и соответствующему положению тормоза таким образом, что для данного входного воздействия или выходного сигнала может быть определено положение привода 48 тормоза. Используя данное описание, специалист поймет, каким образом можно использовать такую информацию для определения положения элементов в конкретной конструкции тормоза.
В других вариантах контроллер 26 использует выходное напряжение пьезоэлектрического привода для отслеживания и износа тормозных накладок и их замены. Выходное напряжение пьезоэлектрического привода соответствует определенным положениям для прикладывания тормозящей силы, при этом контроллер 26 обнаруживает износ тормозной накладки в том случае, когда фактическое положение для данного воздействия отличается от ожидаемого положения (по данным выходного напряжения). В одном варианте, когда контроллер 26 определяет положение, отличающееся от ожидаемого (например, износ тормозной накладки), то контроллер 26 автоматически подстраивает параметры управления для обеспечения требуемого торможения, выдает индикацию для эксплуатирующей службы относительно обнаруженного износа накладки, либо и то и другое вместе.
В других примерах выполнения в контроллере 26 информация о положении используется для определения эффективности деформируемого материала привода 48 тормоза для приложения тормозящей силы и проверки того, что двигатель 12 не работает, преодолевая приложенную тормозящую силу.
На Фиг.5 приведена иллюстрация другого варианта выполнения тормоза подъемной машины, включающего дисковый тормозной элемент 132. Смещающие элементы 138 установлены в неподвижной плите 140. Смещающие элементы 138 заставляют диск 142, который включает тормозную накладку 144, прикладывать тормозящую силу к диску 22. Тяга 145 связана с приводами 148 тормоза, который работает, в основном, так же как и приводы 48 тормоза, прикладывая заданную тормозящую силу к диску 22. Приводы 148 тормоза в данном примере выполнения смещают дисковый тормозной элемент 132, преодолевая постоянное давление смещающих элементов 138.
На Фиг.4 представлен другой пример выполнения тормоза 20, не имеющий смещающего элемента 38. В этом варианте контроллер 26 заданным образом воздействует на деформируемый материал привода 48 тормоза для освобождения тормозных накладок 34, 44 от диска 22. Когда воздействие на деформируемый материал снимается, например, в случае если контроллер принимает решение не оказывать воздействие или при отказе электроснабжения, тормозные накладки 34, 44 захватывают диск 22, создавая тормозящую силу. Таким образом, средство 26 управления может использовать только приводы 48 тормоза для управления тормозящей силой, не требуя отдельного смещающего элемента, например механической пружины. В другом варианте контроллер 26 может заданным образом воздействовать на деформируемый материал для сжатия материала с целью приложения тормозящей силы к диску 22. В примерах, где используются известные батареи деформируемых материалов, прочность кипы слоев материала достаточна, чтобы выдержать циклическое приложение и снятие тормозящих сил.
Положительной особенностью варианта выполнения тормоза 20 без смещающего элемента 38 является дальнейшее сокращение размеров. В отсутствие смещающего элемента 38 размеры неподвижного рычага 40 клещевого тормоза уменьшаются (то есть неподвижный рычаг 40 клещевого тормоза сдвигается ближе к диску 22). За счет компактности пьезоэлектрического привода 48 тормоза можно уменьшить занимаемое им место в конструкции тормоза 20. Кроме того, уменьшение веса за счет исключения смещающего элемента 38 и связанных с ним узлов конструкции для его крепления может снизить вес тормоза 20 в целом и его стоимость по сравнению с известными тормозами.
Хотя здесь были раскрыты предпочтительные варианты выполнения изобретения, специалисту должно быть понятно, что определенные его модификации находятся в пределах области притязаний настоящего изобретения. Поэтому для определения истиной области патентных притязаний данного изобретения и его содержания необходимо изучить приведенную ниже формулу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНАЯ МАШИНА (ВАРИАНТЫ) И СПОСОБ ИЗМЕРЕНИЯ НАГРУЗКИ В ПОДЪЕМНОЙ СИСТЕМЕ | 2005 |
|
RU2423311C2 |
| СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2509641C2 |
| КЛЕЩЕВОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 2012 |
|
RU2583123C2 |
| РЕВЕРСИВНАЯ СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2516419C2 |
| СИСТЕМА ТОРМОЖЕНИЯ ЛИФТА | 2011 |
|
RU2590799C2 |
| КЛЕЩЕВОЕ ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557097C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С СИСТЕМОЙ ТОРМОЖЕНИЯ | 2009 |
|
RU2516426C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2021 |
|
RU2811602C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ПАССАЖИРСКОГО КОНВЕЙЕРА И ПАССАЖИРСКИЙ КОНВЕЙЕР | 2007 |
|
RU2461748C2 |
| СИСТЕМЫ ПОДЪЕМНОГО УЗЛА И СПОСОБЫ | 2008 |
|
RU2492904C2 |
Подъемная машина включает двигатель, который приводит во вращение вал (14) подъемной машины. Тормоз (20) подъемной машины прикладывает тормозящую силу к диску (22), который соединен с валом (14) подъемной машины, для замедления или остановки вращения вала (14) подъемной машины. В одном из вариантов, тормоз (20) подъемной машины включает смещающий элемент (38), который прикладывает смещающее давление к тормозному механизму клещевого типа для приложения тормозящей силы к диску (22). Привод (48) тормоза, имеющий деформируемый материал, перемещается, противодействуя смещающему давлению для управления сцеплением между тормозным механизмом (32) клещевого типа и диском (22). Контроллер управления заданным образом изменяет тормозящую силу, приложенную к диску (22), управляя электрическим входным воздействием на деформируемый материал привода (48) тормоза. Положение тормозного элемента по отношению к вращающейся части определяют с использованием величины выходного сигнала материала. Изобретение обеспечивает улучшение эксплуатационных характеристик. 3 н. и 16 з.п. ф-лы, 5 ил.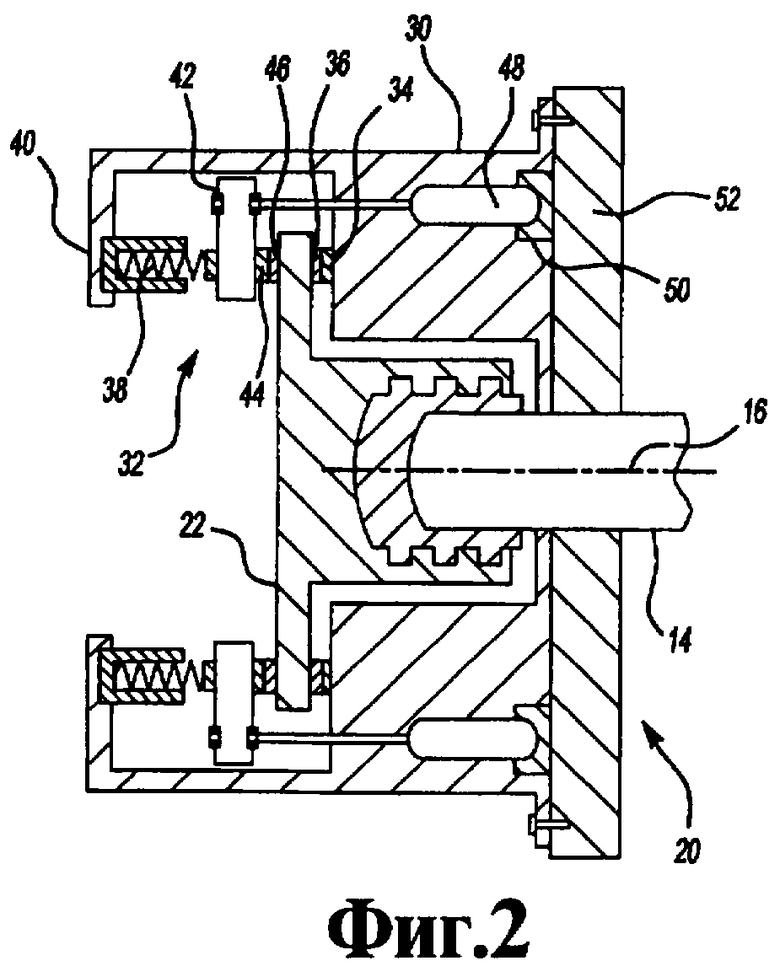
1. Способ управления тормозом подъемной машины, тормозной элемент которой установлен с возможностью захвата вращающейся части подъемной машины, в котором управление сцеплением между тормозным элементом и вращающейся частью подъемной машины осуществляют посредством селективного управления тормозящей силой, прикладываемой тормозным элементом за счет воздействия на материал привода тормоза, изменяющего свою форму в ответ на это воздействие, а положение тормозного элемента по отношению к вращающейся части определяют с использованием величины выходного сигнала материала.
2. Способ по п.1, в котором к упомянутому материалу прикладывают по крайней мере электрическое или магнитное воздействие.
3. Способ по п.1, в котором смещение тормозного элемента в соответствующие различные положения торможения осуществляют путем изменения величины воздействия.
4. Способ по п.1, в котором упомянутый материал представляет собой по крайней мере один материал из группы, включающей пьезоэлектрический, магнитострикционный или электрострикционный материалы.
5. Способ по п.1, в котором тормозной элемент смещают с его захватом вращающейся части и затем оказывают противодействие смещению путем селективного деформирующего воздействия на материал.
6. Способ по п.1, в котором определяют положение тормозного элемента по отношению к вращающейся части с использованием электрического тока, вызванного воздействием.
7. Способ по п.1, в котором определяют положение тормозного элемента по отношению к вращающейся части с использованием электрического напряжения, связанного с выходным сигналом материала.
8. Способ управления тормозом подъемной машины, включающий использование привода тормоза, имеющего материал, который является деформируемым в ответ на селективное воздействие для управления сцеплением между тормозным элементом и вращающейся частью, вращающейся под действием подъемной машины, в котором положение тормозного элемента по отношению к вращающейся части определяют с использованием величины выходного сигнала материала привода тормоза.
9. Способ по п.8, в котором положение тормозного элемента по отношению к вращающейся части определяют с использованием электрического тока, вызванного воздействием на материал.
10. Способ по п.8, в котором положение тормозного элемента по отношению к вращающейся части определяют с использованием электрического напряжения, связанного с выходным сигналом материала.
11. Способ по п.8, в котором тормозящую силу, прикладываемую при торможении тормозным элементом, селективно изменяют посредством управления воздействием на материал и тем самым управления сцеплением между тормозным элементом и вращающейся частью.
12. Способ по п.8, в котором материал представляет собой по крайней мере один материал из группы, включающей пьезоэлектрический, магнитострикционный или электрострикционный материалы.
13. Подъемная машина, содержащая вращающую часть, и тормоз, взаимодействующий с вращающейся частью, и связанная с контроллером управления, отличающаяся тем, что она содержит привод тормоза, содержащий материал, форма которого изменяется в ответ на селективное воздействие для создания тормозящей силы, приложенной к вращающейся части, при этом контроллер управления установлен с возможностью определения положения тормозного элемента, установленного с возможностью перемещения с противодействием вращению вращающейся части подъемной машины в соответствии с электрическим выходным сигналом материала.
14. Машина по п.13, отличающаяся тем, что изменение формы представляет собой по крайней мере расширение упомянутого материала для изменения тормозящей силы в первом направлении или сжатие упомянутого материала для изменения тормозящей силы в противоположном направлении.
15. Машина по п.13, отличающаяся тем, что упомянутый материал представляет собой по крайней мере один материал из группы, включающей пьезоэлектрический, магнитострикционный или электрострикционный материалы.
16. Машина по п.13, отличающаяся тем, что упомянутый привод тормоза установлен с возможностью перемещения между положениями торможения, соответствующими приложенным тормозящим силам.
17. Машина по п.13, отличающаяся тем, что упомянутый привод тормоза установлен с возможностью перемещения тормозного элемента с захватом вращающейся части подъемной машины и с возможностью управления положением упомянутого тормозного элемента посредством материала.
18. Машина по п.13, отличающаяся тем, что контроллер управления связан с упомянутым приводом тормоза с возможностью управления упомянутым воздействием.
19. Машина по п.13, отличающаяся тем, что воздействие представляет собой по крайней мере воздействие электрического тока, электрического поля, напряжения или магнитного поля.
| US 2002100646 A1, 01.08.2002 | |||
| US 5645143 A, 08.07.1997 | |||
| ВИНТОВОЙ ДОМКРАТ | 1990 |
|
RU2018482C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКАЯ ФРИКЦИОННАЯ МУФТА | 1991 |
|
RU2019751C1 |
| Управляемая фрикционная муфта | 1976 |
|
SU564467A1 |

