ч1
4 ел
Изобретение относится к электрооборудованию скоростных лифтов и может быть Использовано в системах автоматического регулирования скорости скоростных пассажирских лифтов и других подъемно-тран- fcriopTHbix .механизмов.
I Целью изобретения является сокраиде- |ние времени пуска путем комненсации мо- :мента трения при использовании подъемной ;установки с безредукторной механической ;передачей.
; На фиг. 1 представлена функциональ- ;ная схема устройства; на фиг. 2 - то же, нелинейного блока.
; Устройство (фиг. 1) содержит узел 1 ре- :гулирования скорости вращения двигателя |2 подъемной машины, енабженного датчиком 3 скорости вращения, выходы которого соединены с одними входами формирователя 4 сигнала, пропорционального изменению положении кабины, относительно за- даппого, другой вход которого соединен с выходо.м задатчика 5 интенсивности движения. К входам задатчика 5 подключены выходы блока 6 временных меток, связанного с формирователем 4 и блоком 7 управления тормозом 8.
Узел 1 включает в себя регулятор 9, суммирующий усилитель 10 и тиристорный регулятор 11 напряжения. К одпому из входов усилителя 10 подключен нелинейный блок 12.
точпику 16 напряжения смещения, а другие - к выходам элементов 2И-НЕ 17 и 18.
35
Устройство работает следующим образом.
При получении от системы автоматики лифта команды на движение блока 6 (фиг. 1)
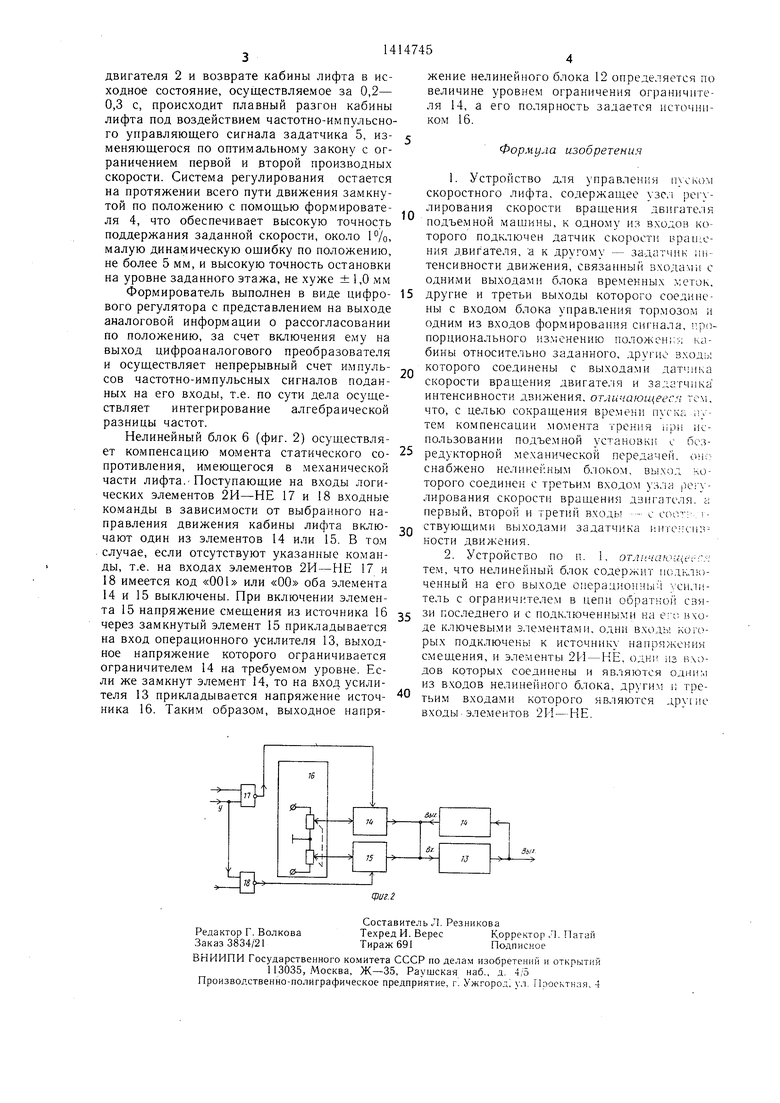
Блок 12 (фиг. 2) содержит операцион- 30 на вход узла 1, а точнее - на вход регуля- ; ный усилитель 13 с ограничителем 14 в це-тора 9.
: пн обратной связи, ключевые элементы 14В рассматриваемом моменте времени, а
: и 15, одни входы которых подключены к ис-именно в момент начала движения кабины
и уравновещивании момента нагрузки движущим моментом двигателя 2, частота заданной скорости с выхода задатчика 5 равна нулю и весь процесс уравновешивания и управляемого движения кабины лифта определяется сигналами датчика 3, а также выходным сигналом формирователя 4. Постуиодает команду на расторможение электро- 40 пающий на его второй вход сигнал, частота механического тормоза 8 в блок 7 управле-которого пропорциональная угловой частония тормозом, в результате чего расторма-те вращения вала двигателя 2, преобразуетживается механическая тормозная система и к валу двигателя 2 прикладыается момент нагрузки. При это.м для осуществления уров- новещивания блок 6 вырабатывает логическую команду запуска задатчика 5 интенсивности, который вырабатывает сначала команду на включение в работу нелинейного блока 12, а спустя небольшую выдержку
времени 0,2-0,3 с команду на развертыва- 50 исходное положение, причем движение ние диаграммы движения. При этом выход- осуществляется в замкнутой по скорости и ной сигнал блока 12, полярность которогоположению системе, что обеспечивает высоопределяется заданным направлением вра-кую точность отработки заданного перемещения двигателя 2 и имеет фиксированное значсм- не по амплитуде, подается на четвер45
тый вход зла 1 на вход усилителя 10 и 55 ное положение.
ся формирователем 4 в аналоговый выходной сигнал, полярность которого однозначно определяется уровнями логических сигналов направления. Под действием входного сигнала, представляющего собой сигнал рассогласования по положению в данном случае, узел 1 начинает отрабатывать заданное перемещение, стремясь возвратить кабину лифщения и после окончания фазы уравновешивания кабина лифта возвращается в исход5
ра 11 напряжения таким образом, что ма- лей,шего изменения сигнала задания скорости, а следовательпо, угла регулирования напряжения, а в конечном .счете двигательного момента двигателя 2 становится достаточно для начала движения кабины лифта по заданной оптимальной диаграмме движения без ее искажения, в силу того, что введение в канал регулирования сигнала нелинейного блока 12 позволяет начать движение с нуле0 выми начальными условиями. В том случае, если момент нагрузки больше момента трения в механической части, уравновешивание статического момента груза двигательным моментом двигателя и возврат кабины в исходное положение обеспечивается включением в работу контура положения, образуемого формирователем 4 и датчиком 3 скорости, в качестве которого используется фотоимпульсный датчик скорости, имеющий два выходных сигнала; первый - частотный, соот0 ветствующий угловой частоте врашения вала двигателя, и второй - логический сигнал направления вращения. На формирователь 4 при этом поступают четыре управляющих сигнала: сигнал задания скорости в виде час5 тотно-импульсного сигнала; сигнал обратной связи по скорости двигателя в виде частотно-импульсного сигнала; логический сигнал направления вращения двигателя 2 и сигнал подъема. Выходные сигналы формирователя 4 и датчика 3 скорости поступают
те вращения вала двигателя 2, преобразует5
ся формирователем 4 в аналоговый выходной сигнал, полярность которого однозначно определяется уровнями логических сигналов направления. Под действием входного сигнала, представляющего собой сигнал рассогласования по положению в данном случае, узел 1 начинает отрабатывать заданное перемещение, стремясь возвратить кабину лифкую точность отработки заданного переменое положение.
щения и после окончания фазы уравновешивания кабина лифта возвращается в исход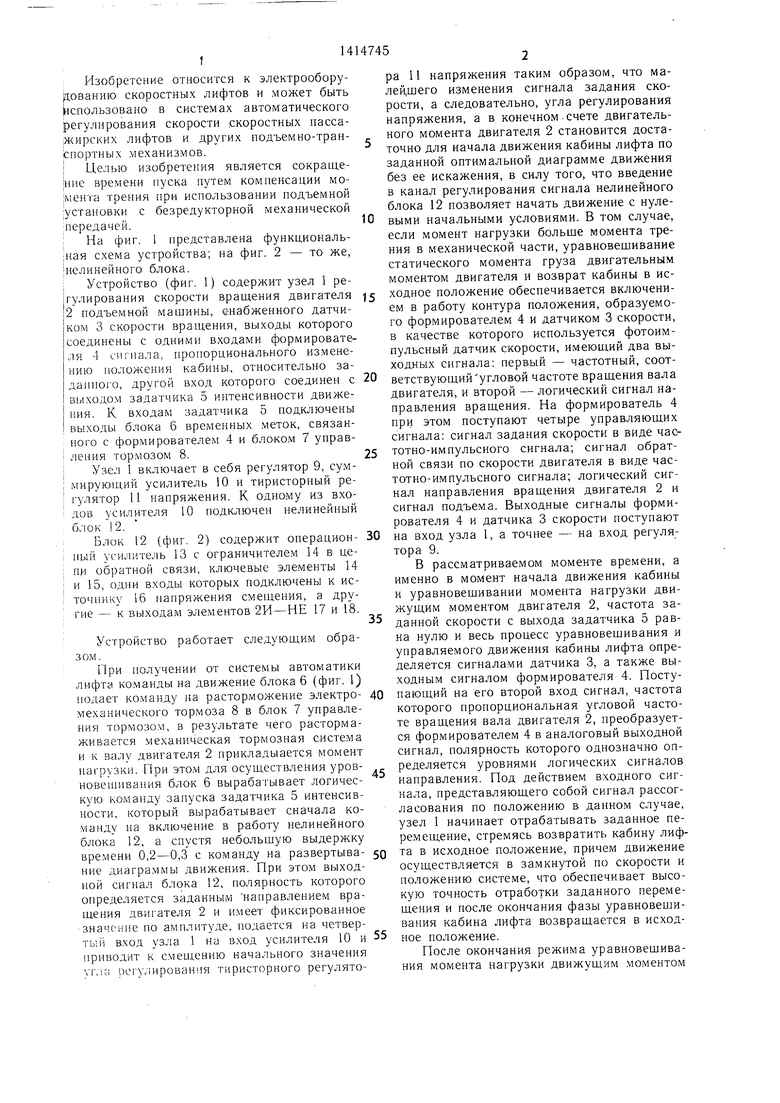
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для управления электроприводом скоростного лифта | 1978 |
|
SU780134A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| Устройство для регулирования скорости нового рулона при автоматической склейке полотен в рулонной печатной машине | 1980 |
|
SU937297A1 |
| Система автоматического управления механической трансмиссией транспортного средства | 1987 |
|
SU1495154A1 |
Изобретение относится к электрооборудованию скоростных лифтов и может быть использовано в системах автоматического регулирования скорости пассажирских лифтов. Целью изобретения является сокращение времени пуска путем ко.мпенсации .момента трения при использовании iio.ii. установки с безредукторнон люханпчсскоГ; передачей. Ко.мпенсацмя момента статического сопротивления, имеющегося в механической части лифта, осуществляется за счет введения в уст)ойство л. , 1еппн пуском скоростного лифта нелинейного блока 12, который вводит коррекцию в -зел 1 регулирования скорости вращения теля 2 путем подач : сигнала lia один и: входов суммирующего ) сил( теля Ю -зла 1. Входы блока 12 подклч че.чы к задатч;:.ку 5 интенсивности движения, выход которого подключен к одному из входов фор.мироеа- теля 4 сигнала, пропорциоил.к.ного изменению положения кабины относительно заданного. входы фоггчироватсля 4 подключены к выходам датчика 3 скорости вращения двигателя 2. Задатчик 5 ч1равля- ется от блока 6 време|;ных .меток. УстроГ,- ство обеспечивает плавный пуск подъемной установки при высокой точност места ос- - тановки. з.п. ф-лы. 2 и.--. to (Л
приводит к смещению начального значения r:i;i регулирования тиристорного регулятоПосле окончания режима уравновешивания момента нагрузки движущим моментом
двигателя 2 и возврате кабины лифта в исходное состояние, осуществляемое за 0,2- 0,3 с, происходит плавный разгон кабины лифта под воздействием частотно-импульсного управляющего сигнала задатчика 5, изменяющегося по оптимальному закону с ограничением первой и второй производных скорости. Система регулирования остается на протяжении всего пути движения замкнутой по положению с помощью формирователя 4, что обеспечивает высокую точность поддержания заданной скорости, около 1%, малую динамическую ощибку по положению, не более 5 мм, и высокую точность остановки на уровне заданного этажа, не хуже ± 1,0 мм
Формирователь выполнен в виде цифрового регулятора с представлением на выходе аналоговой информации о рассогласовании по положению, за счет включения ему на выход цифроаналогового преобразователя и осуществляет непрерывный счет импульсов частотно-импульсных сигналов поданных на его входы, т.е. по сути дела осуществляет интегрирование алгебраической разницы частот.
Нелинейный блок 6 (фиг. 2) осуществляет компенсацию мо.мента статического сопротивления, имеющегося в механической части лифта.-Поступающие на входы логических элементов 2И-НЕ 17 и 18 входные команды в зависимости от выбранного направления движения кабины лифта включают один из элементов 14 или 15. В том случае, если отсутствуют указанные команды, т.е. на входах элементов 2И-НЕ 17 и 18 имеется код «001 или «00 оба элемента 14 и 15 выключены. При включении элемента 15 напряжение смещения из источника 16 через замкнутый элемент 15 прикладывается на вход операционного усилителя 13, выходное напряжение которого ограничивается ограничителем 14 на требуемом уровне. Если же замкнут элемент 14, то на вход усилителя 13 прикладывается напряжение источника 16. Таким образом, выходное напряфиг. г
Составитель Л. Резникова
Техред И. ВересКорректор , 1. Патан
Тираж 691Подписное
ВНИИПИ Государственного ко.митета СССР по делам изобретений н открытий
1 13035, .Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород ул. Поосктнзя, 4
Редактор Г. Волкова Заказ 3834/21
0
5
0
5
0
5
0
жение нелинейного блока 12 определяется по величине уровнем ограничения ограничителя 14, а его полярность задается источником 16.
Формула изобретения
. Устройство для управления пуском скоростного лифта, содержао.ее узол лирования скорости вращения двигателя подъе.мной машины, к одному из ВХОДОБ которого подключен датчик скорости вран1С- ния двигателя, а к другому - задатчик iin- тенсивности движения, связанный входами с одними выходами блока временных :еток, другие и третьи выходы которого соединены с входом блока управления тормозом н одним из входов формирования сигнала, .пропорционального 1зменению положен ;: : кабины относительно заданного, другие зходь: которого соединены с выходами датчика скорости вращения двигате,1я и задатчика интенсивности движения, отличающееся тем, что, с целью сокращения времени пуска иу- те.м компенсации момента трения нри использовании подъе.мной ycraHOBKii с без- редукторной .механической передачей, он,- снабжено нелинейным блоком, выход которого соединен с третьим входом узла ре;л - лирования скорости вращения двигателя, а первый, второй и третий входы - с i- ствующими выходами задатчика интек-сп:-- ности движения.
тем, что нелинейный блок содержит подключенный на его выходе операционные си:п - тель с огранич1- .телем в цепи обратной связи последнего и с подключенными на ei r. нчо- де ключевы.ми эле.ментами, одни входы которых подключены к источнику напряжения смещения, и элементы 2И-НЕ, одип из входов крторы.х соединены и являются од1П1м из входов нелинейного блока, други. i; третьим входами которого являются другие входы элементов 2И-НЕ.
(.
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
