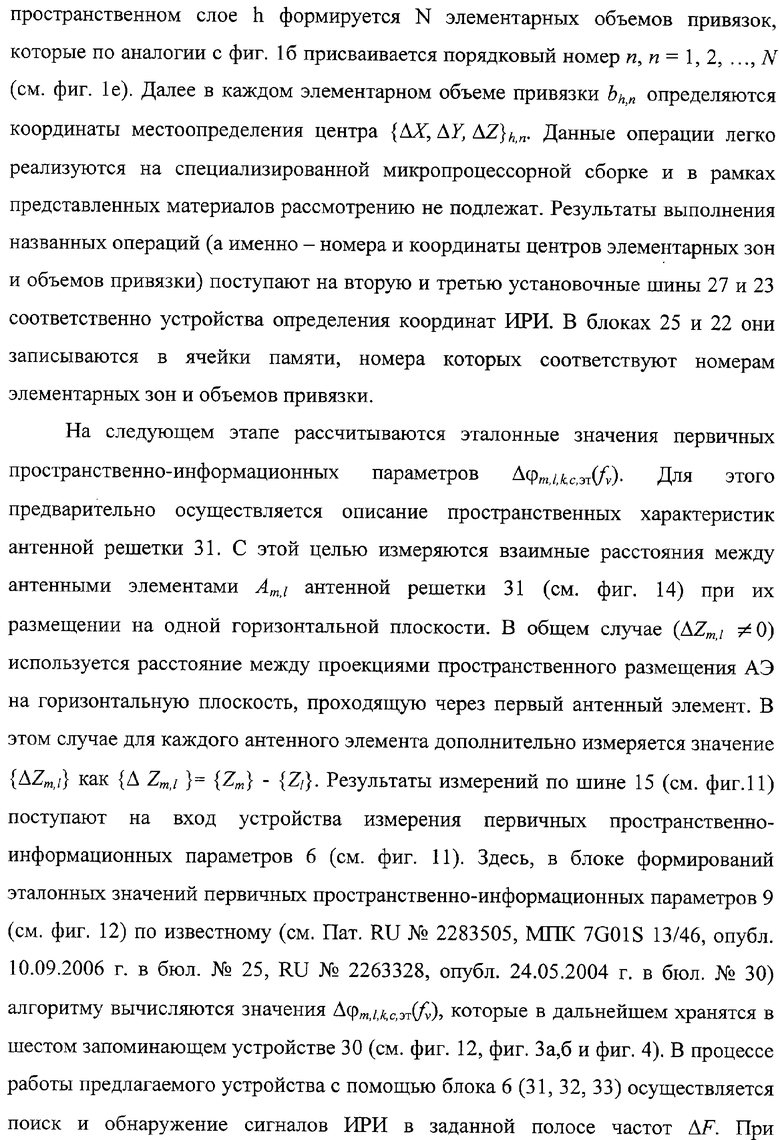
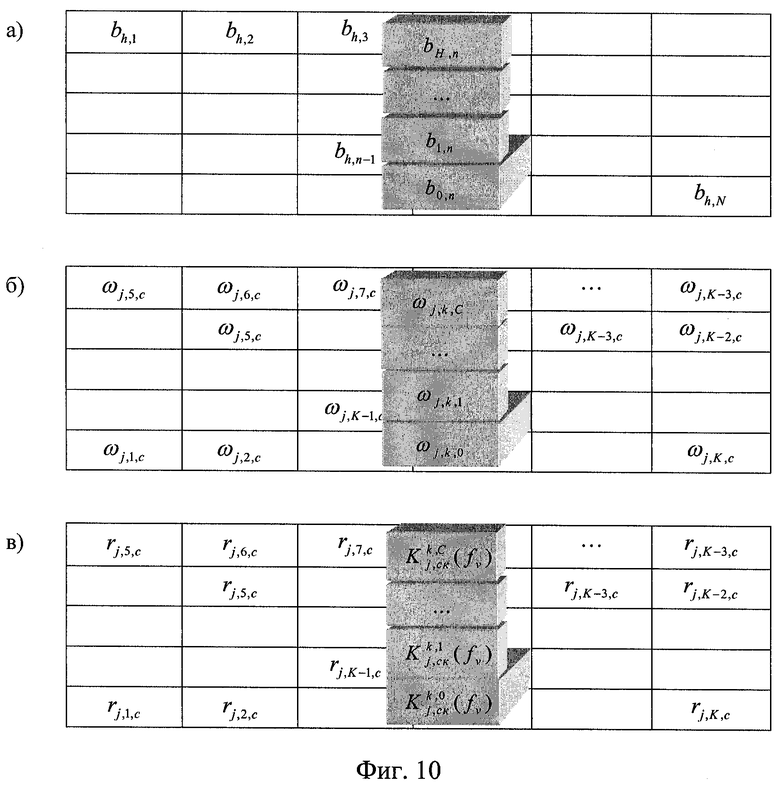
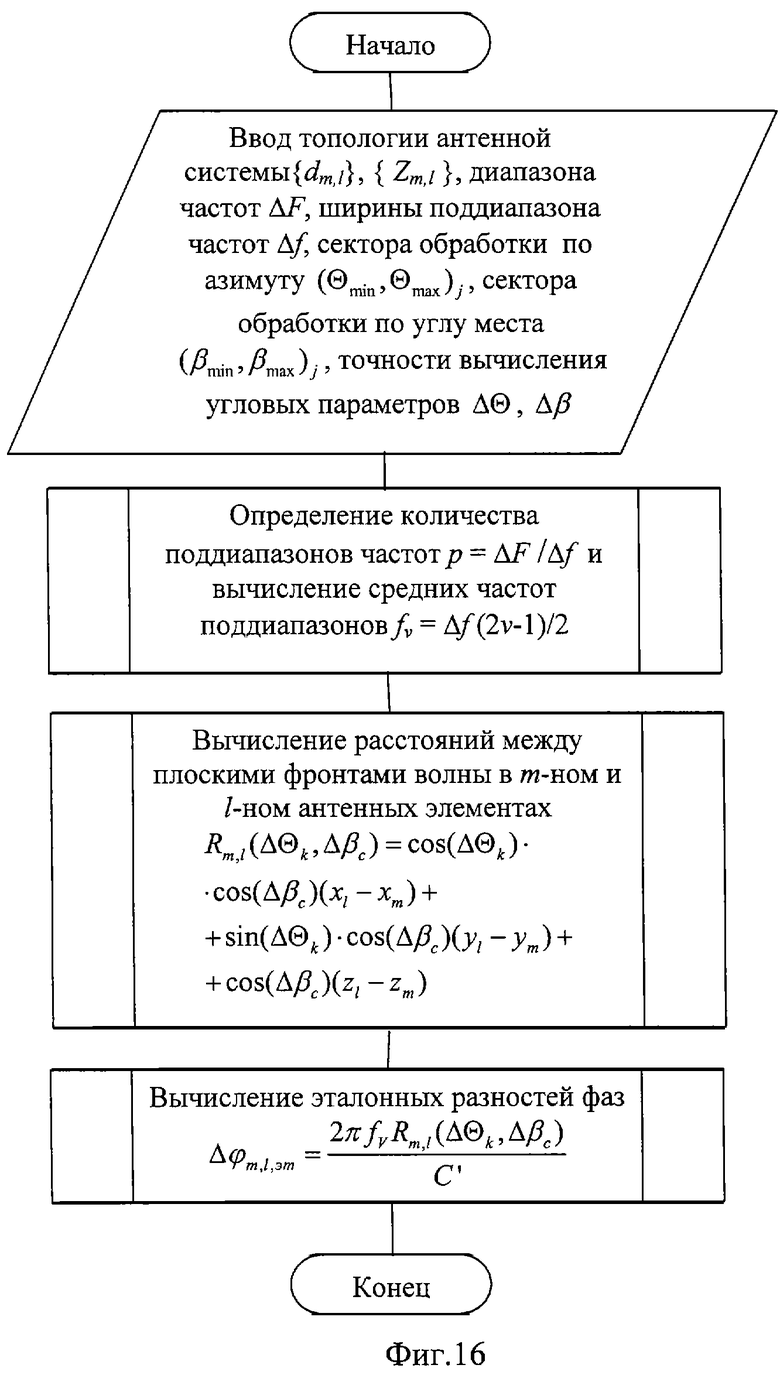
1. Способ определения координат источника радиоизлучения в заданных зоне контроля и полосе частот ΔF перемещающимся в пространстве пеленгатором, включающий на подготовительном этапе вычисление количества N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, определение координат местоположения центров элементарных зон привязки {X, У}0,n, присвоение каждой элементарной зоне привязки порядкового номера b0,n, n=1, 2,..., N, расчет и запоминание эталонных значений первичных пространственно-информационных параметров на выходах Am,l-х антенных элементов, где m, l=1, 2,..., М; m≠l, M>2, относительно направлений прихода тестирующего сигнала в азимутальной плоскости с дискретностью ΔΘk, где k=1, 2,..., К; K·ΔΘk=2π; причем эталонные значения первичных пространственно-информационных параметров рассчитывают для средних частот fν=Δf/(2ν-1)/2, где ν=1, 2,..., Р, P=ΔF/Δf - число частотных поддиапазонов; Δf ∈ ΔF - ширина частотного поддиапазона, в процессе работы при обнаружении пеленгатором в точке j, j=1, 2,..., J, сигнала источника радиоизлучения на частоте fν, включающий измерение первичных пространственно-информационных параметров на выходах Аm,l-ных антенных элементов решетки с одновременным измерением вторичных параметров: координат местоположения пеленгатора {ХП, YП} и пространственной ориентации его антенной решетки, вычисление для каждого направления в горизонтальной плоскости от -π до +π с дискретностью ΔΘk разности между эталонными и измеренными значениями первичных пространственно-информационных параметров, возведение в квадрат полученных разностей и их суммирование, запоминание результатов вычислений KΘ,j(fν) совместно со значениями вторичных параметров, последовательный сдвиг в азимутальной плоскости совокупности сумм KΘ,j(fν) на величину склонения антенной решетки пеленгатора ΔΘj,скл=iΔΘk, где i=1, 2,...,I; IΔΘk=2π, относительно направления на север, запоминание скорректированной последовательности сумм KΘ,jск(fν), приведение в соответствие каждой элементарной зоне привязки азимутального угла Θj,n значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - север и пеленгатора в j-й точке - центр n-й элементарной зоны привязки, формирование матрицы измерений Rj(Θk,n)ν, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,k,n значений скорректированных сумм KΘ,j,k,ск(fν), соответствующих углам Θj,n, запоминание матрицы Rj(Θk,n)ν, сложение элементов rj,k,n матрицы Rj(Θk,n)ν, с соответствующими элементами rj-1,k,n предшествующей матрицы Rj-1(Θk,n)ν, присвоение суммарной матрице имени Rj(Θk,n)ν, определение после выполнения J измерений первичных пространственно-информационных параметров минимальной суммы К0,n(fν) в элементах матрицы измерений Rj(Θk,n)ν, принятие координат местоположения центра элементарной зоны привязки {X, У}0,n, соответствующей min К0,n(fν) за координаты местоположения обнаруженного источника радиоизлучения, отличающийся тем, что на подготовительном этапе пространство над зоной контроля равномерно разбивают на Н слоев, каждому слою присваивают порядковый номер h, h=1, 2,..., Н, каждый слой делят на элементарные объемы привязки, присваивают каждому элементарному объему привязки порядковый номер bh, n=1, 2,..., N; определяют координаты местоположения центров {X, Y, Z}h,n элементарных объемов привязки bh,n рассчитывают дополнительные эталонные значения первичных пространственно-информационных параметров на выходах Аm,l-х антенных элементов антенной решетки пеленгатора, относительно направлений прихода тестирующего сигнала в угломестной плоскости с дискретностью и Δβc, с=1, 2,..., С, С·Δβc=π/2, определяемых заданной точностью измерения координат источника радиоизлучения {ΔХ, ΔY, ΔZ}, а в процессе работы дополнительно измеряют высоту местности над уровнем моря в j-й точке размещения пеленгатора [ZП]j в момент проведения измерений, вычисляют разность между эталонными и измеренными значениями первичных пространственно-информационных параметров, полученные разности возводят в квадрат и суммируют, результаты вычислений KΘ,β,j(fν) запоминают совместно с соответствующими значениями вторичных параметров, для каждого направления ΔΘk, k=1, 2,..., K, формируют вектор-столбцы  размерности С из соответствующих значений KΘ,β,j(fν), последовательно сдвигают элементы вектор-столбцов
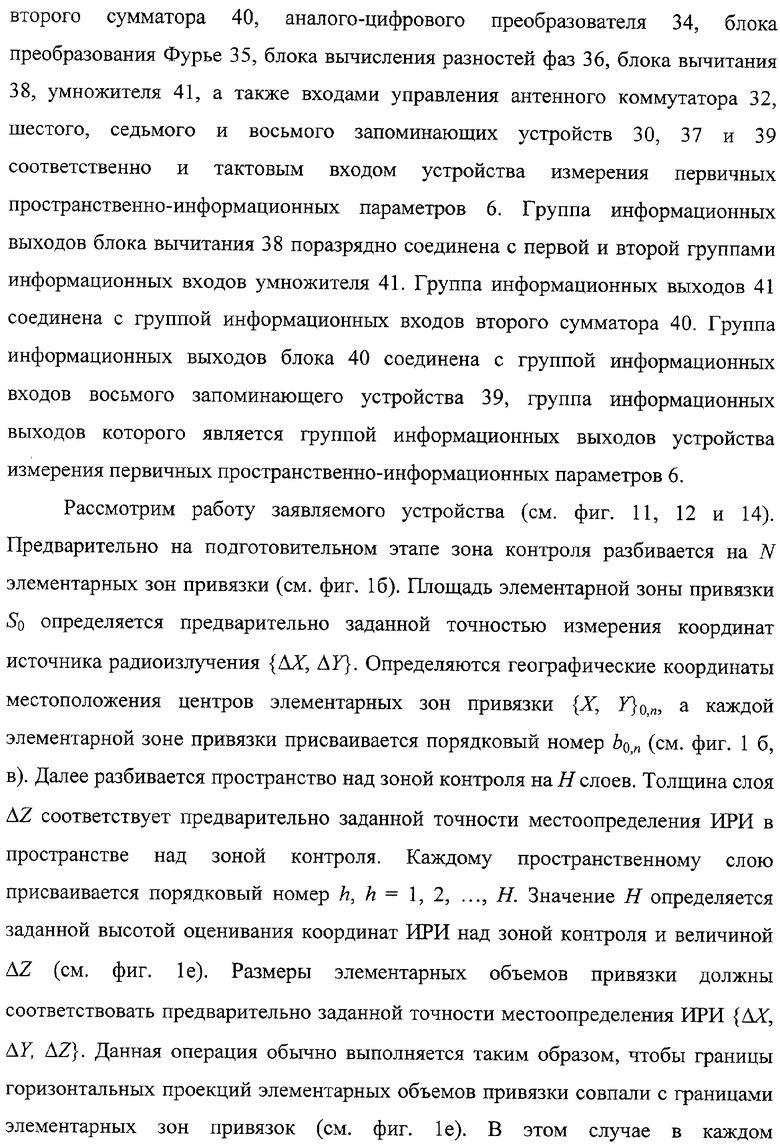
размерности С из соответствующих значений KΘ,β,j(fν), последовательно сдвигают элементы вектор-столбцов  в вертикальной плоскости на величину склонения в угломестной плоскости Δβj,скл, последовательно сдвигают уточненные вектор-столбцы
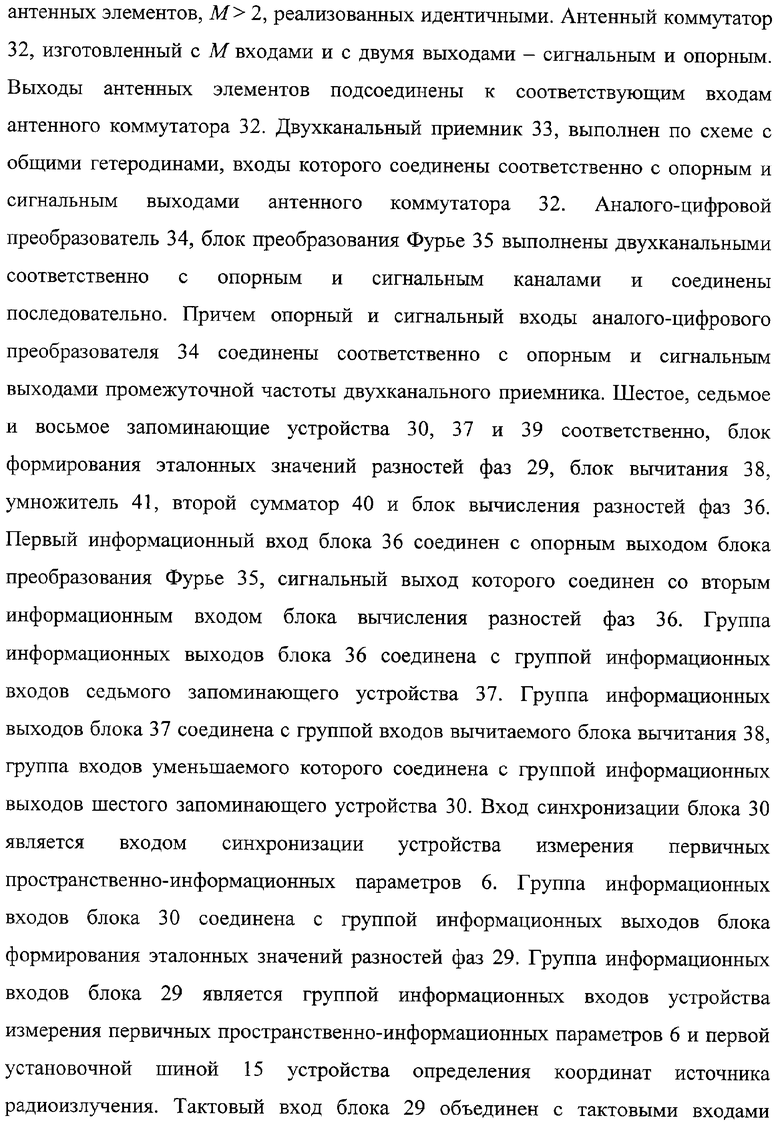
в вертикальной плоскости на величину склонения в угломестной плоскости Δβj,скл, последовательно сдвигают уточненные вектор-столбцы  в азимутальной плоскости на значение отклонения антенной решетки пеленгатора ΔΘj,скл относительно направления на север, запоминают скорректированную совокупность вектор-столбцов
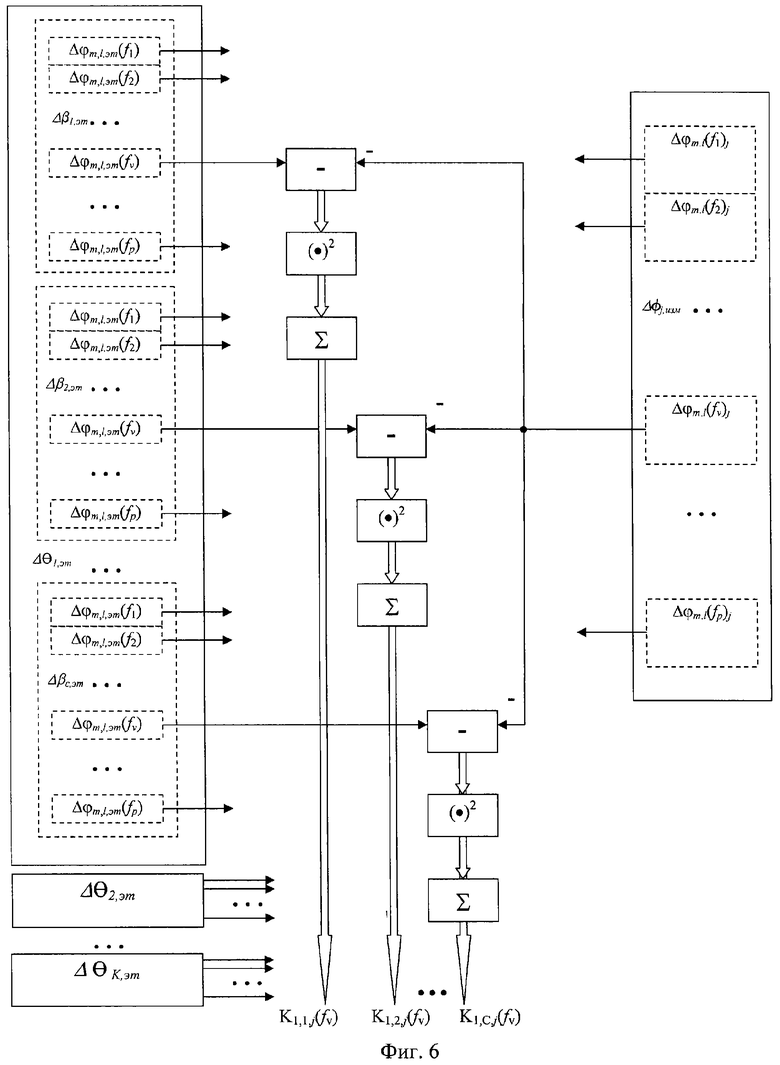
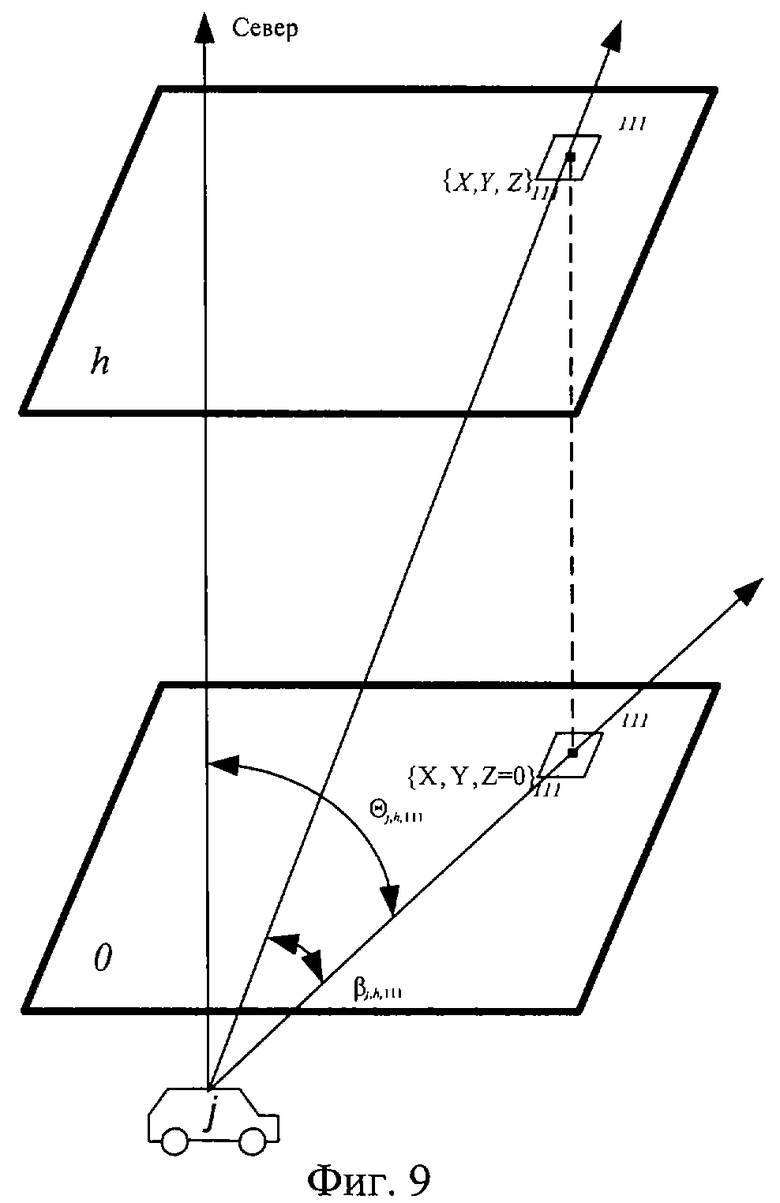
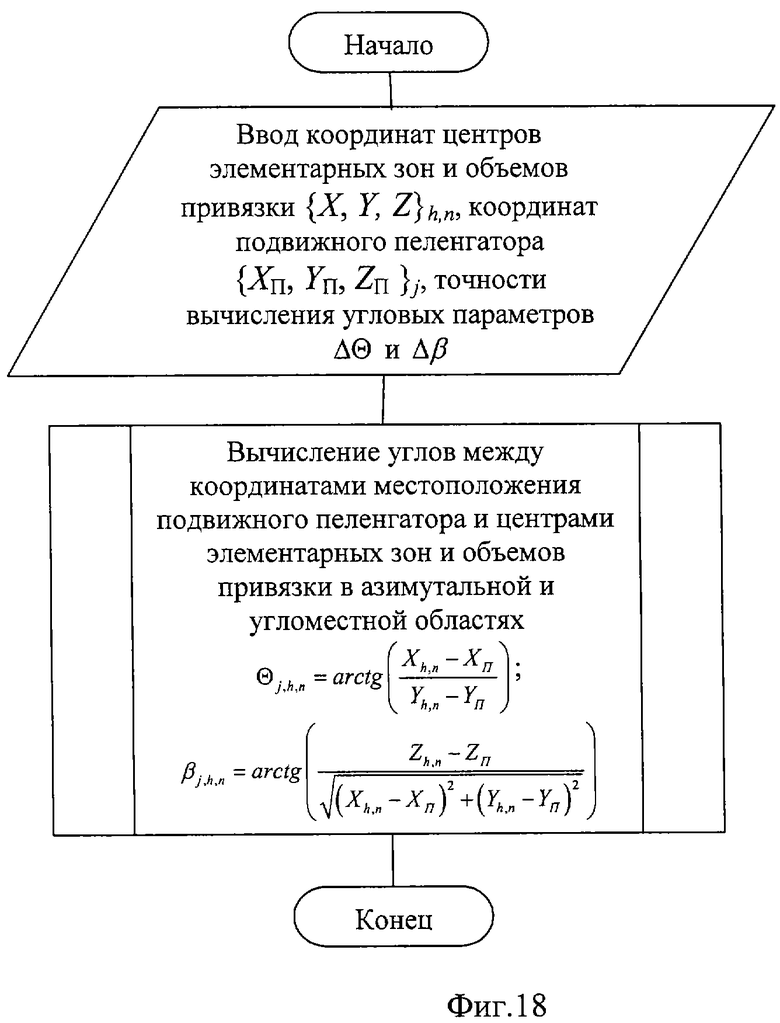
в азимутальной плоскости на значение отклонения антенной решетки пеленгатора ΔΘj,скл относительно направления на север, запоминают скорректированную совокупность вектор-столбцов  , каждому элементарному объему привязки приводят в соответствие азимутальный угол ΔΘj,h,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - север и пеленгатора в j-й точке - координаты проекции центра элементарного объема привязки bh,n на поверхность земли, и угол места βj,h,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - координаты центра bh,n, элементарного объема привязки и координаты пеленгатора в j-й точке - координаты проекции центра элементарного объема привязки bh,n, на поверхности земли, формируют трехмерную матрицу измерений Rj(Θk,h,n, βc,h,n)ν, размерность которой определяется объемом зоны контроля, количеством элементарных зон и объемов привязки, путем записи в элементы матрицы RJ(Θk,n)ν значений соответствующих скорректированных вектор-столбцов
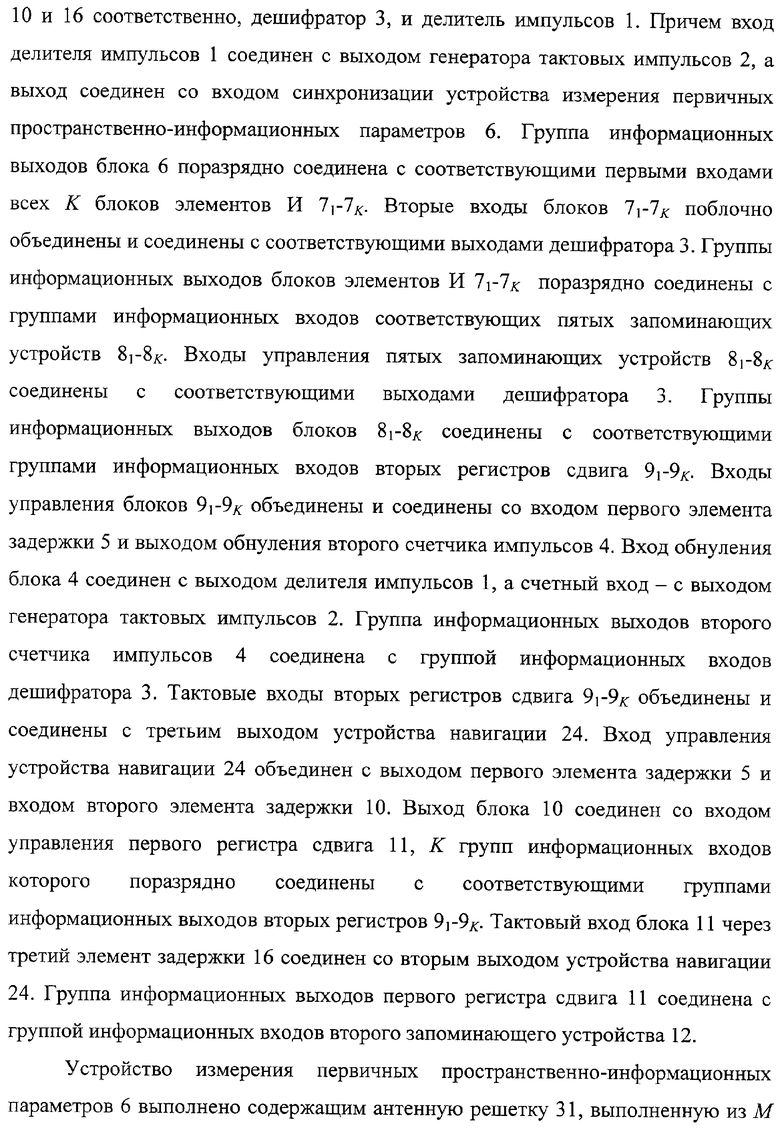
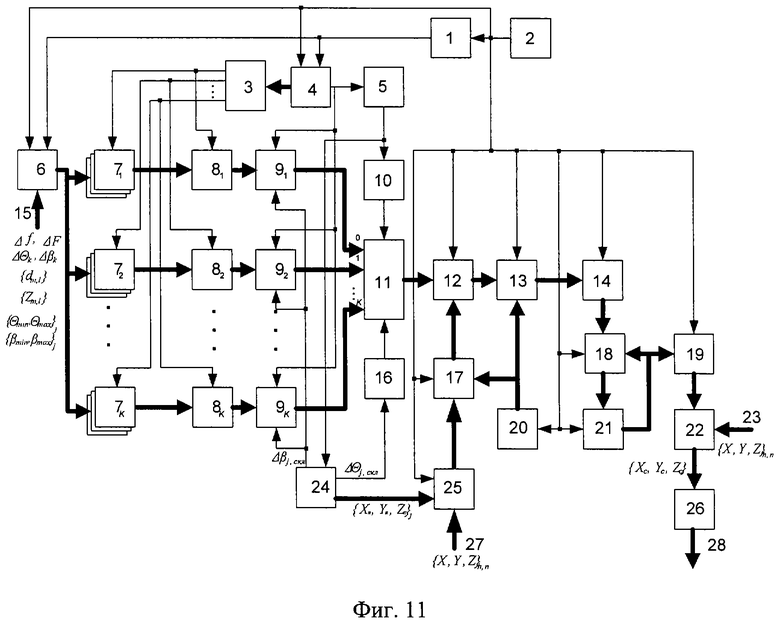
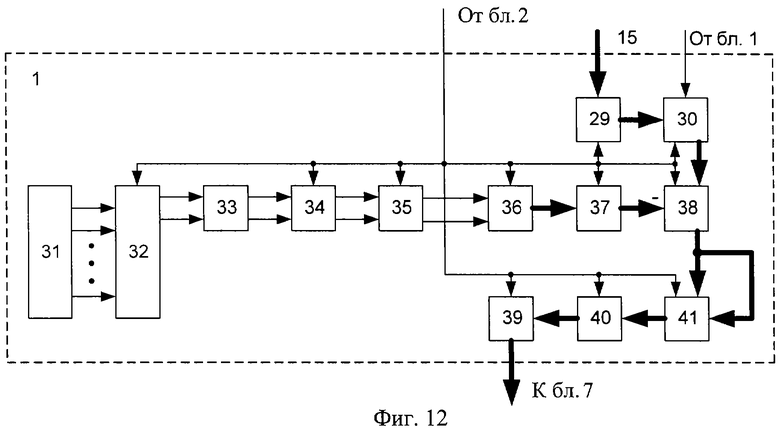
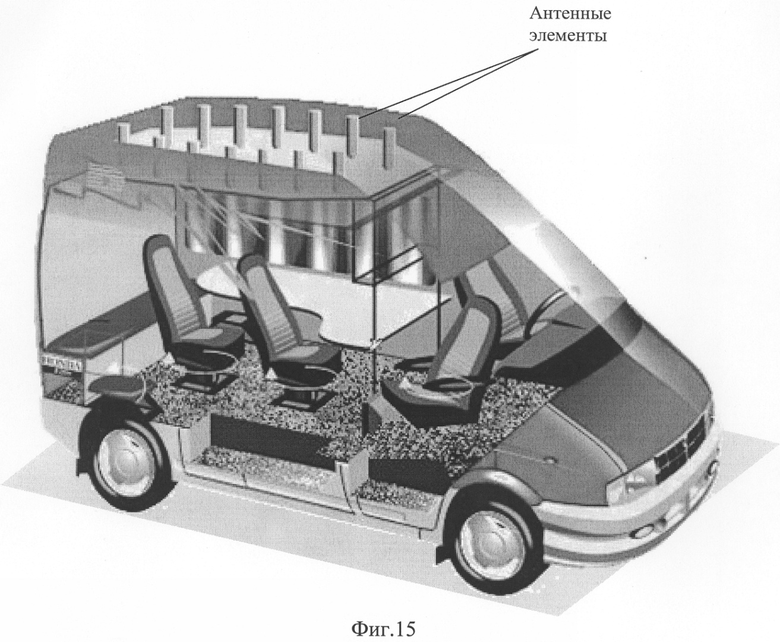
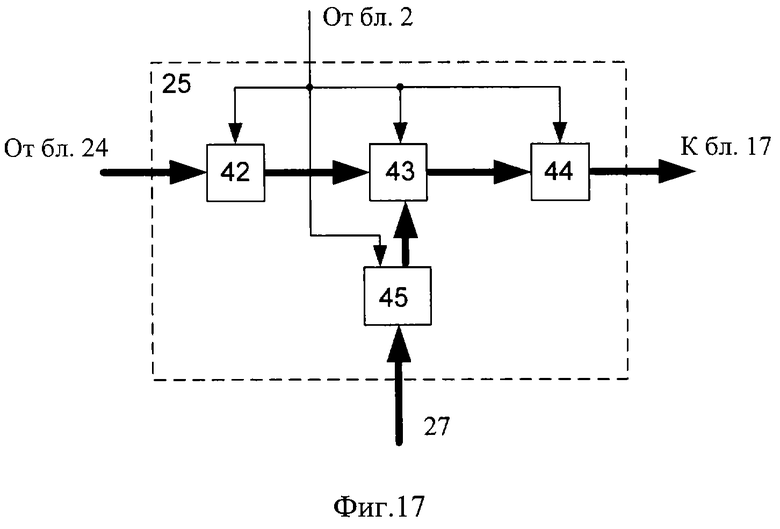
, каждому элементарному объему привязки приводят в соответствие азимутальный угол ΔΘj,h,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - север и пеленгатора в j-й точке - координаты проекции центра элементарного объема привязки bh,n на поверхность земли, и угол места βj,h,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - координаты центра bh,n, элементарного объема привязки и координаты пеленгатора в j-й точке - координаты проекции центра элементарного объема привязки bh,n, на поверхности земли, формируют трехмерную матрицу измерений Rj(Θk,h,n, βc,h,n)ν, размерность которой определяется объемом зоны контроля, количеством элементарных зон и объемов привязки, путем записи в элементы матрицы RJ(Θk,n)ν значений соответствующих скорректированных вектор-столбцов  размерности С+1, в качестве первых элементов которых используются собственно значения матрицы RJ(Θk,n)ν, запоминают трехмерную матрицу измерений Rj(Θk,h,n, βc,h,n)ν, складывают элементы rj,h,n, вектор-столбцов трехмерной матрицы измерений с соответствующими элементами rj-1,h,n, вектор-столбцов предшествующей трехмерной матрицы измерений Rj-1(Θk,h,n, βc,h,n)ν, а суммарной трехмерной матрице присваивается имя Rj(Θk,h,n, βc,h,n)ν, после выполнения J измерений первичных пространственно-информационных параметров определяют минимальную сумму Кh,n(fν) в элементах вектор-столбцов трехмерной матрицы измерений RJ(Θk,h,n, βc,h,n)ν, а координаты местоположения центра элементарной зоны или объема привязки {X, Y, Z}h,n, соответствующие min Kh,n(fν) принимают за координаты местоположения обнаруженного источника радиоизлучения.2. Устройство определения координат источника радиоизлучения, включающее устройство навигации, предназначенное для определения положения подвижного пеленгатора в момент измерения первичных пространственно-информационных параметров источника радиоизлучения и определения склонения антенной решетки подвижного пеленгатора относительно направления на север и склонения в угломестной плоскости в момент измерения параметров источника радиоизлучения, генератор тактовых импульсов, первый вычислитель-формирователь, формирующий матрицу углов W(Θj,h,n, βc,h,n)ν, первое, второе, третье и четвертое запоминающие устройства, второй вычислитель-формирователь, формирующий матрицу измерений Rj(Θk,h,n, βc,h,n)ν, устройство измерения первичных пространственно-информационных параметров, группа информационных входов которого является первой установочной шиной устройства определения координат источника радиоизлучения, первый регистр сдвига, первый счетчик импульсов, первый сумматор, последовательно соединенные блок оценивания для определения кода числа, соответствующего номеру элементарной зоны или объема привязки в зоне контроля с наиболее вероятным расположением источника радиоизлучения, блок определения координат и устройство отображения, группа информационных выходов которого является выходной информационной шиной устройства определения координат источника радиоизлучения, вторая установочная шина которого соединена со второй группой информационных входов первого вычислителя-формирователя, первая группа информационных входов которого соединена с первой группой информационных выходов устройства навигации, а группа информационных выходов соединена с группой информационных входов первого запоминающего устройства, группа адресных входов которого объединена с группой адресных входов второго вычислителя-формирователя и группой информационных выходов первого счетчика импульсов, а группа информационных выходов первого запоминающего устройства соединена с группой адресных входов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого регистра сдвига, а группа информационных выходов соединена с группой информационных входов второго вычислителя-формирователя, группа информационных выходов которого соединена с группой информационных входов третьего запоминающего устройства, группа информационных выходов которого соединена с первой группой информационных входов первого сумматора, вторая группа информационных входов которого объединена с группой информационных входов блока оценивания и соединена с группой информационных выходов четвертого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого сумматора, а вход управления соединен со входами синхронизации первого и второго вычислителей-формирователей, первого сумматора и блока оценивания, входами управления первого, второго и третьего запоминающих устройств, счетным входом первого счетчика импульсов, тактовым входом блока измерения первичных пространственно-информационных параметров и соединен с выходом генератора тактовых импульсов, а вторая группа информационных входов блока определения координат является третьей установочной шиной устройства измерения координат источника радиоизлучения, отличающееся тем, что дополнительно введены второй счетчик импульсов, группа из К блоков элементов И, группа из К пятых запоминающих устройств, группа из К вторых регистров сдвига, первый, второй и третий элементы задержки, дешифратор, и делитель импульсов, вход которого соединен с выходом генератора тактовых импульсов, а выход - со входом синхронизации устройства измерения первичных пространственно-информационных параметров, группа информационных выходов которого поразрядно соединена с соответствующими первыми входами всех К блоков элементов И, вторые входы которых поблочно объединены и соединены с соответствующими выходами дешифратора, а группы информационных выходов блоков элементов И поразрядно соединены с группами информационных входов соответствующих пятых запоминающих устройств, входы управления которых соединены с соответствующими выходами дешифратора, а группы информационных выходов соединены с соответствующими группами информационных входов вторых регистров сдвига, входы управления которых объединены и соединены со входом первого элемента задержки и выходом обнуления второго счетчика импульсов, вход обнуления которого соединен с выходом делителя импульсов, счетный вход - с выходом генератора тактовых импульсов, а группа информационных выходов второго счетчика импульсов соединена с группой информационных входов дешифратора, тактовые входы вторых регистров сдвига объединены и соединены с третьим выходом устройства навигации, вход управления устройства навигации объединен с выходом первого элемента задержки и входом второго элемента задержки, выход которого соединен со входом управления первого регистра сдвига, К групп информационных входов которого поразрядно соединены с соответствующими группами информационных выходов вторых регистров сдвига, тактовый вход через третий элемент задержки соединен со вторым выходом устройства навигации.3. Устройство по п.2, отличающееся тем, что устройство измерения первичных пространственно-информационных параметров выполнено содержащим антенную решетку, выполненную из М антенных элементов, М>1, реализованных идентичными, антенный коммутатор, изготовленный с М входами и с двумя выходами - сигнальным и опорным, притом выходы антенных элементов подсоединены к соответствующим входам антенного коммутатора, двухканальный приемник, выполненный по схеме с общими гетеродинами, входы которого соединены соответственно с опорным и сигнальным выходами антенного коммутатора, аналого-цифровой преобразователь, блок преобразования Фурье, выполненные двухканальными соответственно с опорным и сигнальным каналами и соединены последовательно, причем опорный и сигнальный входы аналого-цифрового преобразователя соединены соответственно с опорным и сигнальным выходами промежуточной частоты двухканального приемника, шестое, седьмое и восьмое запоминающие устройства, блок формирования эталонных значений разностей фаз, блок вычитания, умножитель, второй сумматор и блок вычисления разностей фаз, первый информационный вход которого соединен с опорным выходом блока преобразования Фурье, сигнальный выход которого соединен со вторым информационным входом блока вычисления разностей фаз, группа информационных выходов которого соединена с группой информационных входов седьмого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов шестого запоминающего устройства, вход синхронизации которого является входом синхронизации устройства измерения первичных пространственно-информационных параметров, а группа информационных входов соединена с группой информационных выходов блока формирования эталонных значений разностей фаз, группа информационных входов которого является группой информационных входов устройства измерения первичных пространственно-информационных параметров и первой установочной шиной устройства определения координат источника радиоизлучения, а тактовый вход объединен с тактовыми входами второго сумматора, аналого-цифрового преобразователя, блока преобразования Фурье, блока вычисления разностей фаз, блока вычитания, умножителя, а также входами управления антенного коммутатора, шестого, седьмого и восьмого запоминающих устройств и тактовым входом устройства измерения первичных пространственно-информационных параметров, группа информационных выходов блока вычитания поразрядно соединена с первой и второй группами информационных входов умножителя, группа информационных выходов которого соединена с группой информационных входов второго сумматора, группа информационных выходов которого соединена с группой информационных входов восьмого запоминающего устройства, группа информационных выходов которого является группой информационных выходов устройства измерения первичных пространственно-информационных параметров.
размерности С+1, в качестве первых элементов которых используются собственно значения матрицы RJ(Θk,n)ν, запоминают трехмерную матрицу измерений Rj(Θk,h,n, βc,h,n)ν, складывают элементы rj,h,n, вектор-столбцов трехмерной матрицы измерений с соответствующими элементами rj-1,h,n, вектор-столбцов предшествующей трехмерной матрицы измерений Rj-1(Θk,h,n, βc,h,n)ν, а суммарной трехмерной матрице присваивается имя Rj(Θk,h,n, βc,h,n)ν, после выполнения J измерений первичных пространственно-информационных параметров определяют минимальную сумму Кh,n(fν) в элементах вектор-столбцов трехмерной матрицы измерений RJ(Θk,h,n, βc,h,n)ν, а координаты местоположения центра элементарной зоны или объема привязки {X, Y, Z}h,n, соответствующие min Kh,n(fν) принимают за координаты местоположения обнаруженного источника радиоизлучения.2. Устройство определения координат источника радиоизлучения, включающее устройство навигации, предназначенное для определения положения подвижного пеленгатора в момент измерения первичных пространственно-информационных параметров источника радиоизлучения и определения склонения антенной решетки подвижного пеленгатора относительно направления на север и склонения в угломестной плоскости в момент измерения параметров источника радиоизлучения, генератор тактовых импульсов, первый вычислитель-формирователь, формирующий матрицу углов W(Θj,h,n, βc,h,n)ν, первое, второе, третье и четвертое запоминающие устройства, второй вычислитель-формирователь, формирующий матрицу измерений Rj(Θk,h,n, βc,h,n)ν, устройство измерения первичных пространственно-информационных параметров, группа информационных входов которого является первой установочной шиной устройства определения координат источника радиоизлучения, первый регистр сдвига, первый счетчик импульсов, первый сумматор, последовательно соединенные блок оценивания для определения кода числа, соответствующего номеру элементарной зоны или объема привязки в зоне контроля с наиболее вероятным расположением источника радиоизлучения, блок определения координат и устройство отображения, группа информационных выходов которого является выходной информационной шиной устройства определения координат источника радиоизлучения, вторая установочная шина которого соединена со второй группой информационных входов первого вычислителя-формирователя, первая группа информационных входов которого соединена с первой группой информационных выходов устройства навигации, а группа информационных выходов соединена с группой информационных входов первого запоминающего устройства, группа адресных входов которого объединена с группой адресных входов второго вычислителя-формирователя и группой информационных выходов первого счетчика импульсов, а группа информационных выходов первого запоминающего устройства соединена с группой адресных входов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого регистра сдвига, а группа информационных выходов соединена с группой информационных входов второго вычислителя-формирователя, группа информационных выходов которого соединена с группой информационных входов третьего запоминающего устройства, группа информационных выходов которого соединена с первой группой информационных входов первого сумматора, вторая группа информационных входов которого объединена с группой информационных входов блока оценивания и соединена с группой информационных выходов четвертого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого сумматора, а вход управления соединен со входами синхронизации первого и второго вычислителей-формирователей, первого сумматора и блока оценивания, входами управления первого, второго и третьего запоминающих устройств, счетным входом первого счетчика импульсов, тактовым входом блока измерения первичных пространственно-информационных параметров и соединен с выходом генератора тактовых импульсов, а вторая группа информационных входов блока определения координат является третьей установочной шиной устройства измерения координат источника радиоизлучения, отличающееся тем, что дополнительно введены второй счетчик импульсов, группа из К блоков элементов И, группа из К пятых запоминающих устройств, группа из К вторых регистров сдвига, первый, второй и третий элементы задержки, дешифратор, и делитель импульсов, вход которого соединен с выходом генератора тактовых импульсов, а выход - со входом синхронизации устройства измерения первичных пространственно-информационных параметров, группа информационных выходов которого поразрядно соединена с соответствующими первыми входами всех К блоков элементов И, вторые входы которых поблочно объединены и соединены с соответствующими выходами дешифратора, а группы информационных выходов блоков элементов И поразрядно соединены с группами информационных входов соответствующих пятых запоминающих устройств, входы управления которых соединены с соответствующими выходами дешифратора, а группы информационных выходов соединены с соответствующими группами информационных входов вторых регистров сдвига, входы управления которых объединены и соединены со входом первого элемента задержки и выходом обнуления второго счетчика импульсов, вход обнуления которого соединен с выходом делителя импульсов, счетный вход - с выходом генератора тактовых импульсов, а группа информационных выходов второго счетчика импульсов соединена с группой информационных входов дешифратора, тактовые входы вторых регистров сдвига объединены и соединены с третьим выходом устройства навигации, вход управления устройства навигации объединен с выходом первого элемента задержки и входом второго элемента задержки, выход которого соединен со входом управления первого регистра сдвига, К групп информационных входов которого поразрядно соединены с соответствующими группами информационных выходов вторых регистров сдвига, тактовый вход через третий элемент задержки соединен со вторым выходом устройства навигации.3. Устройство по п.2, отличающееся тем, что устройство измерения первичных пространственно-информационных параметров выполнено содержащим антенную решетку, выполненную из М антенных элементов, М>1, реализованных идентичными, антенный коммутатор, изготовленный с М входами и с двумя выходами - сигнальным и опорным, притом выходы антенных элементов подсоединены к соответствующим входам антенного коммутатора, двухканальный приемник, выполненный по схеме с общими гетеродинами, входы которого соединены соответственно с опорным и сигнальным выходами антенного коммутатора, аналого-цифровой преобразователь, блок преобразования Фурье, выполненные двухканальными соответственно с опорным и сигнальным каналами и соединены последовательно, причем опорный и сигнальный входы аналого-цифрового преобразователя соединены соответственно с опорным и сигнальным выходами промежуточной частоты двухканального приемника, шестое, седьмое и восьмое запоминающие устройства, блок формирования эталонных значений разностей фаз, блок вычитания, умножитель, второй сумматор и блок вычисления разностей фаз, первый информационный вход которого соединен с опорным выходом блока преобразования Фурье, сигнальный выход которого соединен со вторым информационным входом блока вычисления разностей фаз, группа информационных выходов которого соединена с группой информационных входов седьмого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов шестого запоминающего устройства, вход синхронизации которого является входом синхронизации устройства измерения первичных пространственно-информационных параметров, а группа информационных входов соединена с группой информационных выходов блока формирования эталонных значений разностей фаз, группа информационных входов которого является группой информационных входов устройства измерения первичных пространственно-информационных параметров и первой установочной шиной устройства определения координат источника радиоизлучения, а тактовый вход объединен с тактовыми входами второго сумматора, аналого-цифрового преобразователя, блока преобразования Фурье, блока вычисления разностей фаз, блока вычитания, умножителя, а также входами управления антенного коммутатора, шестого, седьмого и восьмого запоминающих устройств и тактовым входом устройства измерения первичных пространственно-информационных параметров, группа информационных выходов блока вычитания поразрядно соединена с первой и второй группами информационных входов умножителя, группа информационных выходов которого соединена с группой информационных входов второго сумматора, группа информационных выходов которого соединена с группой информационных входов восьмого запоминающего устройства, группа информационных выходов которого является группой информационных выходов устройства измерения первичных пространственно-информационных параметров.