Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения априорно неизвестного источника радиоизлучения (ИРИ).
Известен разностно-дальномерный способ определения координат источника радиоизлучения (см. Пат. RU №2000129837, опубл. 20.10.2002 г.; Пат. RU №2204145, опубл. 05.10.2003 г.). Он заключается в приеме и измерении задержек Δτi сигнала группой взаимосвязанных с известным местоположением пунктов приема, решении гиперболических уравнений на центральном приемном пункте, на основе которого определяют координаты источника радиоизлучения.
Недостатком аналогов являются недопустимо большие ошибки местоопределения ИРИ, в случае, когда последний излучает импульсы с высокой частотой следования. Так, в случае, когда период следования импульсов излучателя меньше максимального времени задержки хотя бы на одном из боковых (периферийных) постов, возникает неоднозначность в определении координат, устранить которую практически невозможно (см. Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001 г., с.323-324). Способ предъявляет высокие требования к системе единого времени и скорости обмена информацией, что также затрудняет реализацию данного технического решения. Однако наиболее существенный недостаток аналогов состоит в невозможности определения координат ИРИ с помощью одного измерителя (реализация способа-аналога базируется на использовании трех и более измерителей).
Известен "Способ определения координат движущегося источника радиоизлучения с неизвестными параметрами" по Пат. RU №2001125859, опубл. 10.06.2003 г. В нем реализуется угломерный разностно-дальномерный способ местоопределения, который основан на приеме, выделении и обработке прямого излучения ИРИ, измерении угловых направлений и частоты принимаемого сигнала, приеме сигнала вторым приемным устройством, антенну которого перемещают относительно первой антенны с заданной скоростью, измерении частоты ИРИ, вычислении проекции заданной скорости относительно перемещения на направление на источник радиоизлучения, вычислении по результатам измерений радиальной скорости перемещения источника радиоизлучения в каждый момент измерения, дальности, азимута и частоты.
Способ-аналог позволяет определить местоположение ИРИ, однако ему также присущи недостатки: для его реализации требуется два измерителя, способ обладает недостаточной точностью определения местоположения ИРИ особенно в сложной сигнально-помеховой обстановке (см. Логинов Н.А. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000 г., с.128-145).
Наиболее близким по технической сущности к заявляемому является способ, реализованный в подвижном радиопеленгаторе, описанном в Пат. RU 2124222, МПК G 01 S 13/46, опубл. 27.12.1998 г. Он включает прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерение первичных пространственно-информационных параметров обнаруженных сигналов с одновременным измерением вторичных параметров: времени измерения первичных параметров, координат местоположения и пространственной ориентации антенной решетки подвижного пеленгатора, преобразование первичных пространственно информационных параметров в пространственные параметры: азимутальный угол Θ, Θ=0,..., 360° и угол места β, β=0,..., 90°, многократное повторное измерение в процессе перемещения пеленгатора совокупности пространственных параметров обнаруженных сигналов и соответствующих им вторичных параметров, определение местоположения источников радиоизлучений с помощью решения системы линейных алгебраических уравнений.
Способ-прототип позволяет определять параметры криволинейных траекторий движения объектов.
Однако способ-прототип так же, как и аналоги, обладает недостаточной точностью измерения координат источников радиоизлучений в силу того, что в нем реализуют двухэтапную обработку результатов измерений. На первом этапе в каждой j-й точке, j=1,..., J, измеряют пространственные параметры Θj и βj, которые на втором этапе используют для вычисления местоположения источника радиоизлучения. При двухэтапной обработке оптимизация способа измерения координат ИРИ может строиться по трем направлениям:
оптимизация второго этапа обработки;
оптимизация первого этапа обработки;
оптимизация (раздельная) обоих этапов обработки.
В книге (Кондратьев B.C. и др. Многопозиционные радиотехнические системы / B.C.Кондратьев, А.Ф.Котов, Л.Н.Марков; Под ред. проф. В.В.Цветнова. - М.: Радио и связь, 1989 г. - 264 с.) показано, что ввиду принципиальной нелинейности обоих этапов обработки все три метода оптимизации систем местоопределения с двухэтапной обработкой дают по точности худшие результаты, чем при оптимальной одноэтапной обработке (см. там же, стр.13).
Наиболее близким по своей технической сущности к заявляемому устройству определения координат источника радиоизлучения является "Подвижный радиопеленгатор" по Пат. RU 2124222, G 01 S 13/46, опубл. 27.12.1998 г.
Устройство-прототип состоит из устройства формирования пеленгов, вычислителя-формирователя, запоминающего устройства, блока решения системы линейных алгебраических уравнений, блока оценивания, блока определения координат, устройства навигации, генератора синхроимпульсов и устройства отображения. Первая группа информационных выходов устройства формирования пеленгов соединена с первой группой информационных входов вычислителя-формирователя и второй группой информационных входов блока определения координат. Вторая группа выходов устройства формирования пеленгов соединена с группой управляющих входов генератора синхроимпульсов. Вторая группа выходов генератора синхроимпульсов соединена с второй группой входов блока решения системы линейных алгебраических уравнений, первая группа информационных входов которого соединена с группой информационных выходов запоминающего устройства. Вторая группа входов управления запоминающего устройства соединена с первой группой выходов генератора синхроимпульсов, а первая группа информационных входов соединена с группой информационных выходов вычислителя-формирователя. Вторая группа информационных входов вычислителя-формирователя соединена с группой информационных выходов устройства навигации. Группа информационных входов блока оценивания соединена с группой информационных выходов блока решения системы линейных алгебраических уравнений, а группа выходов соединена с первой группой входов блока определения координат. Группа информационных выходов блока определения координат соединена с группой информационных входов устройства отображения, группа информационных выходов которого является выходной информационной шиной подвижного радиопеленгатора.
Целью заявленных технических решений является разработка способа и устройства определения координат источника радиоизлучения на базе одного измерителя, обеспечивающих повышение точности местоопределения путем применения одноэтапной обработки.
В заявленном способе поставленная цель достигается тем, что в известном способе определения координат ИРИ, включающем прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерение первичных пространственно-информационных параметров обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения пеленгатора и пространственной ориентации его антенной решетки, многократное повторное измерение совокупности первичных и вторичных параметров в процессе перемещения пеленгатора по свободной траектории, предварительно вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки. Определяют координаты местоположения центров элементарных зон привязки. Присваивают каждой элементарной зоне привязки порядковый номер n=1, 2,..., N. Рассчитывают и запоминают эталонные значения первичных пространственно-информационных параметров на выходах Am,l-ных антенных элементов антенной решетки пеленгатора, где m, l=1, 2,..., М; m≠l, М>2, относительно направлений прихода тестирующего сигнала с дискретностью ΔΘk, где k=1, 2,..., К; K·ΔΘ=2π. Значение ΔΘk определяется заданной точностью измерения координат источника радиоизлучения {ΔX, ΔY}. Эталонные значения первичных пространственно-информационных параметров рассчитывают для средних частот fν=Δf(2ν-1)/2, где ν=1, 2,..., Р; Р=ΔF/Δf - число частотных поддиапазонов; Δf∈ΔF - ширина частотного поддиапазона. При обнаружении пеленгатором в точке j, j=1, 2,..., J, сигнала источника радиоизлучения на частоте fν в каждом цикле измеряют первичные пространственно-информационные параметры на выходах Am,l-ных антенных элементов решетки. Для каждого направления от -π до +π дискретностью ΔΘk вычисляют разность между эталонными и измеренными значениями первичных пространственно-информационных параметров. Полученные разности возводят в квадрат и суммируют, а результаты вычислений KΘ,j,k(fν) запоминают совместно со значениями вторичных параметров. Последовательно сдвигают в азимутальной плоскости совокупность сумм KΘ,j,k(fν) на величину склонения антенной решетки пеленгатора ΔΘj,скл=iΔΘk, где i=1, 2,..., I, IΔΘk=2π, относительно направления на север. Запоминают скорректированную последовательность сумм КΘ,j,k,ск(fν). Каждой элементарной зоне привязки приводят в соответствие азимутальный угол Θj,k,n, значение которого определяется углом между направлениями: координаты пеленгатора в 7-й точке - север и пеленгатора в j-й точке - центр n-й элементарной зоны привязки. Формируют матрицу измерений Rj(Θk,n)ν, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,k,n, соответствующие углам Θj,k,n, значений скорректированных сумм КΘ,j,k,ск(fν). Запоминают матрицу Rj(Θk,n)ν. Складывают элементы rj,k,n матрицы Rj(Θk,n)ν с соответствующими элементами rj-1,k,n предшествующей матрицы Rj-1(Θk,n)ν, а суммарной матрице присваивают имя Rj(Θk,n)ν. После выполнения J измерений первичных пространственно-информационных параметров определяют минимальную сумму Kn(fν) в элементах матрицы измерений RJ(Θk,n)ν, а координаты местоположения центра элементарной зоны привязки {X, Y}n, соответствующей min Kn(fν), принимают за координаты местоположения обнаруженного источника радиоизлучения.
Для измерения первичных пространственно-информационных параметров в соответствующем поддиапазоне частот Δfν для каждой пары антенных элементов Al,m подвижного пеленгатора (термины: "устройство определения координат радиоизлучения" и "подвижный пеленгатор" в рамках представленных материалов несут единую смысловую нагрузку и являются взаимозаменяемыми), находящегося в точке j, синхронно принятые высокочастотные сигналы преобразуют в электрические сигналы промежуточной частоты, дискретизируют их и квантуют. После этого из них формируют четыре последовательности отсчетов путем разделения на квадратурные составляющие. Запоминают в каждой последовательности предварительно заданное число В отсчетов квадратурных составляющих сигналов, корректируют запомненные отсчеты последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна. Формируют из скорректированных последовательностей квадратурных составляющих отсчетов сигналов две комплексные последовательности отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов. Далее обе комплексные последовательности отсчетов сигналов преобразуют с помощью дискретного преобразования Фурье, попарно перемножают отсчеты сигнала преобразованной последовательности одного антенного элемента Am на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Al, m, l=1, 2,..., М, m≠1. Рассчитывают для текущей пары антенных элементов разность фаз сигналов для каждой частоты поддиапазона V по формуле Δϕm,l(fν)=arctg(Uc(fν)j/Us(fν)j). Далее значение разностей фаз Δϕm,l(fν)j для всех возможных парных комбинаций антенных элементов подвижного пеленгатора используют в качестве первичных пространственно-информационных параметров для точки j.
В качестве отсчетов временного окна используют отсчеты функции Кайзера, или Блэкмана, или Хемминга, или треугольной функции.
Благодаря новой совокупности признаков в заявляемом способе достигается более полный учет информации о поле сигнала в J точках его приема. Указанные возможности реализуются при одноэтапном определении координат, что и обуславливает положительный эффект в виде повышения точности местоопределения ИРИ в районах с пересеченной местностью, горах, условиях городской застройки и низких отношениях сигнал/шум.
В заявляемом устройстве определения координат источника радиоизлучения поставленная цель достигается тем, что в известном устройстве, состоящем из устройства навигации, первого вычислителя-формирователя, первого запоминающего устройства, генератора синхроимпульсов, выход которого соединен с входом управления первого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого вычислителя формирователя, первая группа информационных входов которого соединена с первой группой информационных выходов устройства навигации, последовательно соединенные блок оценивания, блок определения координат и устройство отображения, группа информационных выходов которого является выходной информационной шиной устройства определения координат источника радиоизлучения, дополнительно введены устройство измерения первичных пространственно-информационных параметров, регистр сдвига, второе запоминающее устройство, второй вычислитель-формирователь, счетчик импульсов, причем группа информационных входов устройства измерения первичных пространственно-информационных параметров является первой установочной шиной устройства определения координат источника радиоизлучения, а группа информационных выходов соединена с группой информационных входов регистра сдвига, вход управления которого соединен с вторым выходом устройства навигации, вторая группа информационных входов первого вычислителя-формирователя является второй установочной шиной устройства определения координат источника радиоизлучения, а группа информационных выходов регистра сдвига соединена с группой информационных входов второго запоминающего устройства, группа адресных входов которого соединена с группой информационных выходов первого запоминающего устройства, а группа информационных выходов соединена с группой информационных входов второго вычислителя-формирователя, группа адресных входов которого объединена с группой адресных входов первого запоминающего устройства и группой информационных выходов счетчика импульсов, третье и четвертое запоминающие устройства и первый сумматор, вторая группа информационных входов которого объединена с группой информационных входов блока оценивания и группой информационных выходов четвертого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов первого сумматора, первая группа информационных входов которого соединена с группой информационных выходов третьего запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов второго вычислителя-формирователя, вход синхронизации которого объединен с входами синхронизации устройства измерения первичных пространственно-информационных параметров, первого вычислителя-формирователя, первого сумматора, блока оценивания, входами управления второго, третьего и четвертого запоминающих устройств, счетным входом счетчика импульсов и выходом генератора синхроимпульсов, а вторая группа информационных входов блока определения координат является третьей установочной шиной устройства определения координат источника радиоизлучения.
Кроме того, устройство определения первичных пространственно-информационных параметров выполнено содержащим антенную решетку, выполненную из М антенных элементов, М>2, реализованных идентичными и расположенными в плоскости пеленгования, антенный коммутатор, изготовленный с М входами и с двумя выходами - сигнальным и опорным, притом выходы антенных элементов подсоединены к соответствующим входам антенного коммутатора, двухканальный приемник, выполненный по схеме с общими гетеродинами, входы которого соединены соответственно с опорным и сигнальным выходами антенного коммутатора, аналого-цифровой преобразователь, блок преобразования Фурье, выполненные двухканальными соответственно с опорным и сигнальным каналами и соединены последовательно, причем опорный и сигнальный входы аналого-цифрового преобразователя соединены соответственно с опорным и сигнальным выходами промежуточной частоты двухканального приемника, пятое, шестое и седьмое запоминающие устройства, блок формирования эталонных значений разностей фаз, блок вычитания, умножитель, второй сумматор и блок вычисления разностей фаз, первый информационный вход которого соединен с опорным выходом блока преобразования Фурье, сигнальный выход которого соединен с вторым информационным входом блока вычисления разностей фаз, информационные выходы которого соединены с группой информационных входов шестого запоминающего устройства, группа информационных входов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов пятого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений разностей фаз, группа информационных входов которого является группой информационных входов устройства измерения первичных пространственно-информационных параметров и первой установочной шиной устройства определения координат источника радиоизлучения, а синхровход объединен с синхровходами второго сумматора, аналого-цифрового преобразователя, блока преобразования Фурье, блока вычисления разностей фаз, блока вычитания, умножителя, а также входами управления антенного коммутатора, пятого, шестого и седьмого запоминающих устройств и входом синхронизации устройства измерения первичных пространственно-информационных параметров, группа информационных выходов блока вычитания поразрядно соединена с первой и второй группами информационных входов умножителя, группа информационных выходов которого соединена с группой информационных входов второго сумматора, группа информационных выходов которого соединена с группой информационных входов седьмого запоминающего устройства, группа информационных выходов которого является группой информационных выходов устройства измерения первичных пространственно-информационных параметров.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: повысить точность местоопределения ИРИ путем реализации одноэтапной обработки.
Проведенный анализ уровня техники позволяет установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемых способа и устройства определения координат источника радиоизлучения, отсутствуют и, следовательно, заявляемый объект обладает свойствами новизны.
Исследование известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемых способа и устройства, показало, что они не следуют явным образом из уровня техники, из которого не выявлена также известность влияния преобразований, предусматриваемых существенными признаками заявляемого изобретения, на достижение результата, что позволяет считать заявляемый объект соответствующим условию патентоспособности "изобретательский уровень".
Заявляемые объекты поясняются чертежами на которых показаны:
на фиг.1 порядок выполнения операций для третьей точки измерений (j=3) и поддиапазона ν:
а, б) формирование элементарных зон привязки и присвоения им порядкового номера;
в) определение координат центра элементарных зон привязки;
г) разбиение заданной полосы частот на поддиапазоны;
д, е) формирование эталонного массива первичных пространственно-информационных параметров;
ж) формирование массива измеренных первичных пространственно-информационных параметров;
з) формирование массива невязок эталонных и измеренных первичных пространственно-информационных параметров с дискретностью в азимутальной области ΔΘk=10;
и) вычисление сумм KΘ,3(fν) с дискретностью ΔΘk=10;
к) вычисление скорректированных сумм КΘ,3,ск(fν);
л) присвоение каждой элементарной зоне привязки n, n=1, 2,..., N; в точке измерений j=3 соответствующего азимутального угла Θj,k,n;
м) формирование матрицы измерений;
на фиг.2 - порядок формирования эталонного массива первичных пространственно-информационных параметров;
на фиг.3 - порядок формирования массива измеренных первичных пространственно-информационных параметров в точке j=3;
на фиг.4 - очередность вычисления сумм KΘ,j,k(fν) в j-й точке измерений поддиапазона V для различных направлений ΔΘk;
на фиг.5 - порядок измерения для каждой элементарной зоны привязки n соответствующего азимутального угла;
на фиг.6 - пространственный спектр сигналов на частоте fν, сформированный на основе измерения разности фаз Δϕl,m,изм(fν)j и Δϕl,m,эт(fν);
на фиг.7 - эпюры напряжений, поясняющие порядок формирования первичных пространственно-информационных параметров;
на фиг.8 - исходные данные для моделирования оцениваемого способа определения координат источника радиоизлучения;
на фиг.9 - зависимость аномальной ошибки оценивания координат для одно- и двухэтапной обработки и соотношения сигнал/шум;
на фиг.10 - структурная схема заявляемого устройства определения координат источника радиоизлучения;
на фиг.11 - структурная схема устройства измерения первичных пространственно-информационных параметров;
на фиг.12 - пары антенных элементов, используемые для обработки: а) 8-элементной решетки и полнодоступного антенного коммутатора; б) 16-элеменнтной антенной решетки при использовании неполнодоступного антенного коммутатора;
на фиг.13 - вариант размещения эллиптической антенной решетки на крыше автомобиля типа "Газель";
на фиг.14 - алгоритм вычисления эталонных значений первичных пространственно-информационных параметров;
на фиг.15 - структурная схема первого вычислителя-формирователя;
на фиг.16 - алгоритм вычисления для каждой элементарной зоны привязки и j-й точки измерений соответствующего азимутального угла Θj,k,n;
на фиг.17 - структурная схема блока оценивания;
на фиг.18 - рисунок к реферату.
Из современного уровня развития техники известно, что местоопределение ИРИ может осуществляться следующими способами (см. Кондратьев B.C. и др. Многопозиционные радиотехнические системы / В.С.Кондратьев, А.В.Котов, Л.Н.Марков; под ред. проф. В.В.Цветнова. - М.: Радио и связь, 1986, с.203-258): дальномерным; разностно-дальномерным; угломерным; разностно-доплеровским; угломерно-дальномерным и др.
Во всех случаях точность местоопределения ИРИ ограничивается погрешностями измерения параметров сигнала: азимута Θ и угла места β, задержки сигнала Δτ, доплеровского сдвига частоты и др., а также несовершенством алгоритмов их обработки. Последнее связано прежде всего с широким использованием в силу ряда причин двухэтапной обработки. В сложных условиях измерений (в городской черте, горах), низком отношении сигнал/шум ошибки местоопределения резко возрастают из-за многолучевости (многомодовости) получаемых оценок параметров сигналов. Оператор поста или автомат вынуждены по заданному критерию принять решение о значении параметра сигнала (часто ошибочное), что влечет за собой аномальные ошибки в определении местоположения ИРИ. Вся остальная неиспользованная информация о поле сигнала (его параметрах) отбрасывается.
Повышение точности измерения местоположения ИРИ обычно достигается за счет увеличения количества пространственно разнесенных измерителей или точек измерения (применительно к системам местоопределения на базе подвижных пеленгаторов), оптимизацией их размещения относительно зоны контроля или маршрута движения измерителя и др. Однако увеличение количества измерителей (точек измерения j) более четырех, пяти в пространственно разнесенных точках вносит несущественный вклад в повышение точности местоопределения. Применительно к системе местоопределения на базе подвижного пеленгатора увеличение числа J точек измерения неминуемо приводит к увеличению времени измерений, что в большинстве практических случаев является недопустимым в силу ограниченного времени работы ИРИ в эфире. Ситуация еще более усугубляется, если ИРИ находится на мобильной базе.
В заявляемых способе и устройстве данное противоречие устраняется благодаря использованию одноэтапной обработки сигналов, которая базируется на использовании всей имеющейся информации о поле сигнала в точках приема.
Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе выполняются следующие операции. Заданную зону контроля, в рамках которой осуществляется местоопределение ПРИ (см. фиг.1а), делят на элементарные зоны привязки (см. фиг.1б). Размеры элементарной зоны привязки соответствуют предварительно заданной точности местоопределения {ΔХ, ΔY}, например 50 м · 50 м. На следующем этапе находят географические координаты центов элементарных зон привязки {X, Y}n и присваивают каждой из них порядковый номер (см. фиг.1б, в) из набора n=1, 2,..., N.
Весь заданный частотный диапазон ΔF делят на поддиапазоны, ширина которых Δf определяется шириной пропускания приемных трактов пеленгатора или значениями стандартной сетки частот, используемой в современных радиосредствах, например, для УВЧ-диапазона она составляет 25 кГц (см. фиг.1г). Поддиапазоны, количество которых P=ΔF/Δf, также нумеруют V=1, 2,..., Р.
На следующем этапе рассчитывают эталонные значения первичных пространственно-информационных параметров для средних частот всех поддиапазонов частот fν=Δf(2V-1)/2. В качестве первичных пространственно-информационных параметров используют значения радиосетей фаз сигналов Δϕm,l(fν) для всех возможных парных комбинаций антенных элементов в рамках антенной решетки подвижного пеленгатора.
Выбор Δϕm,l(fν) в качестве первичного пространственно-информационного параметра основан на следующем. Одним из наиболее перспективных направлений реализации измерителей пространственных параметров является использование интерферометрических пеленгаторов (см. Логинов Н.А. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000, стр.138-139). Интерферометры существуют двух типов: фазовые и корреляционные (см. там же, стр.138). В материалах Пат. US №4728959 "Радиопеленгационная система", МПК G 01 S 5/04, опубл. 8.08.1986 г., отмечается, что в сильно пересеченной местности и городских условиях в меньшей степени подлежат искажению фазовые параметры сигнала. Кроме того, в книге Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p. отмечается, что "потенциальные возможности оценки угла прихода сигнала путем сравнения фазы выше, чем у корреляционного интерферометра, если оцениваемый сигнал узкополосен и имеет малую нестабильность несущей частоты".
Порядок расчета эталонных первичных пространственно-информационных параметров следующий. Вводят топологию антенной системы. Данные по топологии включают значения взаимных расстояний между антенными элементами решетки. В подвижных пеленгаторах обычно используют антенные решетки с круговой или эллиптической пространственной структурой. В качестве направления ориентации антенной решетки, как правило, принимают вектор, проходящий через диаметрально противоположные антенные элементы и совпадающий с продольной осью транспортного средства в направлении его кабины.
Величина погрешности измерения углового параметра ΔΘ определяется из следующих соображений. Погрешность измерения параметра Θ не должна приводить к ошибкам местоопределения, превышающим площадь элементарной зоны привязки. В процессе расчета эталонных первичных пространственно-информационных параметров моделируют размещение эталонного источника поочередно вокруг антенной решетки подвижного пеленгатора с дискретностью ΔΘk на удалении нескольких длин волн. При этом полагается, что фронт приходящей волны плоский. Для каждого углового параметра ΔΘk, k=1, 2,..., К, вычисляют значение разностей фаз Δϕm,l,k,эт(fν) для всех возможных комбинаций пар антенных элементов решетки и всех частотных поддиапазонов V:
Δϕm,l,k,эт(fν)=2πfνRm,l(ΔΘk)/С,
где

расстояние между плоскими фронтами волны в m-м и l-м антенных элементах, пришедших к решетки под углом ΔΘk, m≠l; xm, ym и xl, yl - координаты m-го и l-го антенных элементов решетки.
Полученные в результате измерений эталонные первичные пространственно-информационные параметры Δϕm,l,к,эт(fν) оформляются в виде эталонного массива данных, вариант представления информации в котором показан на фиг.1д, е и фиг.2.
При обнаружении одного или нескольких сигналов в точке j в заданной полосе частот ΔF формируют массив измеренных первичных пространственно-информационных параметров (см. фиг.1ж, фиг.3), структура представления информации в котором аналогична вышерассмотренной на фиг.2. Для этого на подвижном пеленгаторе значения Δϕm,l(fν)j, измеренные в точке j для всех сочетаний пар антенных элементов Am,l всех Р частотных поддиапазонов, оформляют в массив первичных пространственно-информационных параметров.
Таким образом, в предлагаемом способе и устройстве первый этап обработки сигналов на подвижном пеленгаторе исключен (этап преобразования первичных пространственно-информационных параметров в пространственные параметры), а вся необходимая информация о поле сигнала в точке j его приема, заключенная в первичных пространственно-информационных параметрах, используется в процессе ее дальнейшей обработки.
В рамках заявляемого способа достоверность информации о поле сигнала достигается:
габаритными характеристиками (разносом между антенными элементами) антенной решетки подвижного пеленгатора;
размерностью (количеством антенных элементов М) антенной решетки подвижного пеленгатора;
характеристиками антенных элементов и их взаимной ориентацией.
Осуществление этих требований рассматривается ниже в рамках реализации устройства определения координат источника радиоизлучения.
На следующем этапе реализации заявляемого способа для каждой j-й точки измерений, в которой обнаружены сигналы в поддиапазоне V, последовательно для всех направлений ΔΘk, k=1, 2,..., К; К·ΔΘk=2π, вычисляют разность между эталонными Δϕm,l,эт(fν) и измеренными Δϕm,l,изм(fν) пространственно-информационными параметрами (см. фиг.1з), которые возводят в квадрат и суммируют в соответствии с выражением (см. фиг.1и и фиг.4):

На фиг.4 иллюстрируется порядок вычисления сумм Kk(fν) для j-й точки измерений на частоте fν для различных направлений ΔΘk. Одновременно с измерением первичных пространственно-информационных параметров и вычислением (1) определяется склонение антенной решетки подвижного пеленгатора относительно направления на север. Данная операция может быть выполнена с помощью гирокомпаса или навигатора GPS (см. Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru). Измеренное значение склонения ΔΘj,скл в дальнейшем используется для последовательного сдвига найденных сумм KΘj(fν) в азимутальной плоскости (см. фиг.1к). В результате выполнения этой операции формируется и запоминается скорректированная последовательность сумм КΘ,j,ск(fν).
Одновременно с рассмотренными выше измерениями определяется местоположение подвижного пеленгатора с помощью устройства навигации, например GPS. Координаты местоположения пеленгатора в дальнейшем используются для приведения в соответствие каждой элементарной зоне привязки текущего азимутального угла Θj,k,n. Последний определяется как угол между двумя векторами: подвижный пеленгатор в j-й точке - север и подвижный пеленгатор в j-й точке - центр соответствующей элементарной зоны привязки (см. фиг.1л и фиг.5).
На основе полученных угловых данных формируют матрицу измерений Rj(Θk,n)ν, размерность которой определяется размерами зоны контроля и элементарной зоны привязки. Данная операция реализуется путем записи в элементы rj,k,n (соответствующие углам Θj,k,n) значений скорректированных сумм KΘ,j,ск(fν) (см. фиг.1м).
На следующем этапе складывают содержимое элементов rj,k,n матрицы Rj(Θk,n)ν с содержимым соответствующих элементов rj-1,k,n матрицы Rj-1(Θk,n)ν, которая была сформирована в результате измерений на предыдущей точке j-1. Суммарной матрице присваивают имя Rj(Θk,n)ν. После выполнения J измерений первичных пространственно-информационных параметров определяют минимальную сумму Kn(fν) в элементах результирующей матрицы измерений RJ(Θk,n)ν. Координаты местоположения центра элементарной зоны привязки {X, Y}n, соответствующие min Kn(fν), принимают за координаты местоположения обнаруженного на частоте fν источника радиоизлучения.
Таким образом, вся необходимая информация о поле сигнала из нескольких точек его приема накапливается и за один этап обработки преобразуется в искомые координаты ИРИ. При этом достигается заметное повышение точности измерений за счет более полного учета информации о поле сигнала в условиях его многолучевости и при низких отношениях сигнал/шум.
Изложенное иллюстрируется на фиг.6, где представлен пространственный спектр D(Θ)ν сигналов на частоте fν, сформированный на основе вычисления скалярных величин KΘ(fν). Значения KΘ(fν) находятся в однозначной зависимости от направления прихода сигнала и вычисляются в соответствии с выражением

где к - разрядность углового спектра D(Θ)ν, которая определяется заданной точностью измерения пеленга ΔΘ. Если ΔΘ=1°, то ΔΘk=1°, К=360.
Результаты получены с помощью фазового интерферометра, лежащего в основе подвижного пеленгатора. Подобные интерферометры находят применение при реализации систем с двухэтапной обработкой сигналов (см. Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p., Логинов Н.А. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000 г., с.138-139, 142, 175-176). В этих измерителях первичные пространственно-информационные параметры Δϕm,l(fν) преобразуются в пространственно-информационные параметры Θ по минимальному значению D(Θ)ν.
В корреляционных интерферометрах (см. Рембовский A.M., Ашихмин А.В., Кузьмин В.А. Наземные мобильные станции автоматизированного радиомониторинга // "Информост" - "Радиоэлектроника и Телекоммуникации", №6 (30), 2003 г. http://www.informost.ru/ss/30/6_2.shtml) первичные пространственно-информационные параметры преобразуются в пространственные по максимальному значению функции D(Θ)ν.
При анализе фиг.6 следует, что наиболее вероятным направлением прихода сигнала является Θ=215°. Для этого направления значение функции D(Θ)ν имеет минимальное значение (68 условных единиц). Однако в спектре присутствует несколько локальных минимумов с направлений 85°, 110°, 165° и 280°, каждый из которых с некоторой вероятностью может оказаться истинным направлением на ПРИ. Природа возникновения локальных минимумов обычно связана с многолучевостью распространения радиоволн в силу разных причин, а также резонансными явлениями в антенной решетке и др. В способе-прототипе эта информация о поле сигнала отбрасывается, а в обработке используется только значение Θj.
В предлагаемом способе вся необходимая информация о поле сигнала, заключенная в значениях первичных пространственно-информационных параметров Δϕm,l(fν), измеренных на всех J точках пространства, в дальнейшем используется в нахождении координат ИРИ.
Рассмотренный выше порядок обработки параметров Δϕm,l(fν) позволяет максимально учесть всю имеющуюся информацию о поле сигнала в пространственно разнесенных точках.
Рассмотрим порядок измерения первичных пространственно-информационных параметров Δϕm,l(fν)j. Синхронно принятые антенными элементами Am и Al высокочастотные сигналы (см. фиг.7а) в поддиапазоне ΔfV преобразуют в электрические сигналы промежуточной частоты (см. фиг.7б). Значение промежуточной частоты определяется характеристиками аналого-цифрового преобразователя. На следующих эпюрах фиг.7 показан порядок преобразования сигналов, принятых лишь антенным элементом Al. Над сигналами, принятыми антенным элементом Am, осуществляют аналогичные преобразования.
Сигналы промежуточной частоты дискретизируют и квантуют (см. фиг.7в). Интервал дискретизации выбирают в соответствии с теоремой отсчетов (см. Введение в цифровую фильтрацию. Под ред. Р.Богнера и А.Константинидиса. - М.: Мир, 1976, стр.26-27). Большинство алгоритмов цифровой обработки сигналов рассчитаны на работу с комплексными числами. Для перехода от действительных к комплексным сигналам применяют квадратурные преобразования сигналов. В свете этого из цифровых сигналов (фиг.7в) обоих каналов формируют четыре последовательности отсчетов (на. фиг.7 две из них для антенного элемента Al представлены эпюрами "д", "ж"). В самом общем виде принимаемый сигнал (см. фиг.7а) U(t) представляется в виде:

где U(t) - огибающая амплитуды сигнала; ϕ(t) - фаза сигнала; ω0 - частота, относительно которой представлены огибающая амплитуды и фаза сигнала.
Более удобная форма представления сигнала u(t) базируется на квадратурных составляющих:

где Vc(f)=U(t)cosϕ(t) и Vs(t)=U(t)sinϕ(t) - квадратурные составляющие сигнала. Составляющие Vc(t) и Vs(t) соответствуют действительной и мнимой частям комплексной огибающей U(t) сигнала u(t). Для этого полученные цифровые отсчеты (фиг. 7в) перемножаются на цифровые отсчеты (фиг.7д, ж) двух гармонических сигналов (фиг.7г, е) одной и той же частоты, сдвинутых относительно друг друга на π/2. Умножение исходного сигнала u(t) на сигнал V(t)=Acos(ω0t) приводит к формированию сигнала Uc(t) вида:

Если частота 2ω0 несколько превышает максимальную скорость изменения фазы ϕ(t)/2, то с помощью фильтра нижних частот можно выделить первое слагаемое в формуле (4)

Выделенный с помощью фильтра нижних частот сигнал Uc1(t) с точностью до постоянного множителя совпадает с квадратурной составляющей Vc(t) (см. фиг.7з). Особенность приведенного на фиг.7 варианта разложения сигнала на квадратуры состоит в том, что фазы исходного сигнала (фиг.7б) и первого (синусоидального) гармонического сигнала совпали. В результате получен частный случай - все значения квадратурной составляющей Vc(t) положительны (см. фиг.7з).
Аналогичным образом формируют вторую квадратурную составляющую путем умножения сигнала U(t) (см. фиг.7в) на сигнал V(t)=Asin(ω0t)
Us(t)=AU(t)sin(ω0t)cos[ω0t+ϕ(t)]=0.5AU(t){sin[ϕ(t)]+sin[2ω0t+ϕ(t)]},

Результат выполнения операции (6) представлен на фиг.7и.
Возможна и другая очередность выполнения названых операций. Аналоговый сигнал u(t) фиг.7а делят на два идентичных сигнала, после чего каждый из них умножают на соответствующий аналоговый гармонический сигнал той же частоты. Эти гармонические сигналы сдвинуты по фазе относительно друг друга на угол π/2 (см. фиг.7г, е). После разложения аналогового сигнала на квадратуры каждую из них оцифровывают.
В результате выполнения операций (5) и (6) формируют четыре последовательности отсчетов (по 2 на каждый антенный элемент Am и Al). В каждой последовательности запоминают и в дальнейшем используют для обработки заданное число В отсчетов квадратурных составляющих. Их количество определяется импульсной характеристикой используемых цифровых фильтров. Для реализации указанной операции могут применятся фильтры с конечной импульсной характеристикой. Преимущество от их применения в пеленгаторе состоит в том, что получение отсчетов с выхода фильтра требуется получать с частотой, в 1000 раз меньшей, чем частота дискретизации сигнала. Для этого отсчеты каждой квадратурной составляющей (см. фиг. 7з, и) сигнала перемножаются на отсчеты временного окна (фиг.7к). В качестве последнего могут быть использованы функции Хэминга, или Блекмана, или Кайзера, или треугольная, или др. (см. Гольденберг Л.М. и др. Цифровая обработка сигналов: Справочник / Л.М.Гольденберг, Б.Д.Матюшкин, М.Н.Поляк. - М.: Радио и связь, 1985. - 312 с.).
В предлагаемом способе в качестве временного окна используется функция
где I0[·] - модифицированная функция Бесселя первого рода и нулевого порядка;
В - число отсчетов временного окна;
α - параметр, определяющий соотношение энергии в центральном и боковых лепестках АЧХ фильтра;
b - номер отсчета временного окна;
ωc=π(FПП-FПЗ)/FД;
FПП - граница полосы пропускания фильтра, отсчитанная от центра фильтра;
FПЗ - начало полосы задержания фильтра, отсчитанная от центра фильтра;
FД - частота дискретизации.
В результате выполнения операции умножения получают четыре скорректированные последовательности квадратурных составляющих (фиг.7л, м).
Из скорректированных последовательностей формируют две комплексные последовательности отсчетов сигналов. Для этого попарно объединяют соответствующие отсчеты скорректированных последовательностей (фиг.7л, м) квадратурных составляющих сигналов антенных элементов. После выполнения данной операции обе комплексные последовательности отсчетов преобразуют с помощью дискретного преобразования Фурье

В результате получают две преобразованные последовательности (см. фиг.7н), характеризующие спектры совокупностей сигналов, принимаемых в антенных элементах Am и Al. Каждая из названных последовательностей несет информацию о фазе сигналов, принимаемых соответствующим антенным элементом.
Далее попарно перемножают частотные отсчеты сигнала преобразованной последовательности (фиг.7н) одного антенного элемента Am на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Al (см. фиг.7р)

где m, l - 1, 2,..., М, m≠1 - номера антенных элементов.
На завершающем этапе для каждой пары антенных элементов рассчитывают разность фаз сигналов Δϕm,l(fν) для частот поддиапазона V по формуле (см. фиг.7с)

Значение разностей фаз сигналов Δϕm,l(fV)j для всех возможных парных комбинаций антенных элементов в рамках каждой точки измерения j используют в качестве первичных пространственно-информационных параметров.
Выполним сравнительную оценку точностных характеристик способа-прототипа и предлагаемого способа определения координат ИРИ.
Потенциальную точность оценивания координат ИРИ определяют матричной границей Крамера-Рао ФКр, равной обращенной информационной матрице Фишера:
В матрице ФКр элементом, несущим информацию о точности определения координат, является  . В работе (см. Дубровин А.В., Сосулин Ю.Г. Одноэтапное оценивание местоположения источников радиоизлучения пассивной системой // Радиотехника и электроника, Том 43, n 12, 1998, с.1486-1494) показано, что двухэтапный и одноэтапный алгоритмы оценивания имеют одинаковую точность, описываемую , при достаточно большом отношении сигнал/шум. Однако при малом отношении сигнал/шум перестает характеризовать точностные характеристики измерителей. В настоящее время аналитические исследования таких ситуаций отсутствуют, в связи с чем сравнение алгоритмов возможно выполнить лишь на основе моделирования.
. В работе (см. Дубровин А.В., Сосулин Ю.Г. Одноэтапное оценивание местоположения источников радиоизлучения пассивной системой // Радиотехника и электроника, Том 43, n 12, 1998, с.1486-1494) показано, что двухэтапный и одноэтапный алгоритмы оценивания имеют одинаковую точность, описываемую , при достаточно большом отношении сигнал/шум. Однако при малом отношении сигнал/шум перестает характеризовать точностные характеристики измерителей. В настоящее время аналитические исследования таких ситуаций отсутствуют, в связи с чем сравнение алгоритмов возможно выполнить лишь на основе моделирования.
Исходные данные для моделирования были выбраны следующим образом. Рассмотрению подлежала система местоопределения на базе подвижного пеленгатора, выполняющего измерения на плоскости в пяти пространственно разнесенных точках. Координаты источника радиоизлучения Xn=30 км, Yn=30 км (см. фиг.8),  - координаты точек измерения первичных пространственно-информационных параметров, выраженные в км. Размер контролируемой зоны составлял 120 км · 120 км, центральная частота сигнала - 100 МГц (λ=1,5 м). Антенная решетка подвижного пеленгатора представляла собой четыре разнесенных на 0,6 м антенных элемента (d=0,6 м). Сигнал и шумы имели прямоугольные спектры, ширина которых 2ΔF=128 кГц, отношение сигнал шум одинаково для всех точек измерения.
- координаты точек измерения первичных пространственно-информационных параметров, выраженные в км. Размер контролируемой зоны составлял 120 км · 120 км, центральная частота сигнала - 100 МГц (λ=1,5 м). Антенная решетка подвижного пеленгатора представляла собой четыре разнесенных на 0,6 м антенных элемента (d=0,6 м). Сигнал и шумы имели прямоугольные спектры, ширина которых 2ΔF=128 кГц, отношение сигнал шум одинаково для всех точек измерения.
В двухэтапном алгоритме вначале оптимально (методом максимального правдоподобия) оценивается пеленг  - направление прихода сигнала в горизонтальной плоскости. На втором этапе на последней (пятой) точке на основе полученных значений
- направление прихода сигнала в горизонтальной плоскости. На втором этапе на последней (пятой) точке на основе полученных значений  вычисляются координаты ИРИ.
вычисляются координаты ИРИ.
В одноэтапном алгоритме оценка местоположения источника излучения проводится путем сканирования по координатам Z (элементарным зонам привязки n) с целью поиска оценки  , максимизирующей функцию правдоподобия.
, максимизирующей функцию правдоподобия.
В качестве критерия качества работы обоих алгоритмов оценивания выбиралась вероятность аномальной ошибки координат ИРИ, под которой понимается вероятность того, что модуль ошибки  где
где 


 и xn, yn - соответственно измеренные и истинные координаты ИРИ, превышает величину
и xn, yn - соответственно измеренные и истинные координаты ИРИ, превышает величину  , а σx и σy - диагональные элементы матрицы .
, а σx и σy - диагональные элементы матрицы .
На фиг.9 показана зависимость вероятности аномальной ошибки оценки координат Ран способа-прототипа (кривая 1) и заявляемого способа (кривая 2) от соотношения сигнал/шум η. Как видим, для выбранных условий предлагаемый способ местоопределения ИРИ имеет преимущество перед способом-прототипом примерно 4-6 дБ. Это объясняется тем, что при низких отношениях сигнал/шум (ниже порогового уровня) помимо основного максимума функции правдоподобия, соответствующего истинным параметрам сигнала, проявляются ложные моды, расположенные произвольно в пространстве поиска и соизмеримые по своему уровню. При высоких отношениях сигнал/шум (η≥10) эффективность заявляемого способа местоопределения ИРИ соизмерима с эффективностью способа-прототипа.
Заявляемое устройство, показанное на фиг.10 и 11, содержит генератор синхроимпульсов 4, устройство навигации 6, первый вычислитель-формирователь 7, первое запоминающее устройство 8. Выход генератора синхроимпульсов 4 соединен с входом управления первого запоминающего устройства 8. Группа информационных входов блока 8 соединена с группой информационных выходов первого вычислителя-формирователя 7, первая группа информационных входов которого соединена с первой группой информационных выходов устройства навигации 6.
Последовательно соединенные блок оценивания 13, блок определения координат 14 и устройство отображения 15, группа информационных выходов 16 которого является выходной информационной шиной устройства определения координат источника радиоизлучения.
Для повышения точности местоопределения источника радиоизлучения дополнительно введены устройство измерения первичных пространственно-информационных параметров 1, регистр сдвига 2, второе, третье и четвертое запоминающие устройства 3, 10 и 18 соответственно, второй вычислитель-формирователь 9, счетчик импульсов 19 и первый сумматор 12. Причем группа информационных входов устройства измерения первичных пространственно-информационных параметров 1 является первой установочной шиной 5 устройства определения координат источника радиоизлучения. Группа информационных выходов блока 1 соединена с группой информационных входов регистра сдвига 2, вход управления которого соединен с вторым выходом устройства навигации 6. Вторая группа информационных входов блока 7 является второй установочной шиной 11 устройства определения координат источника радиоизлучения. Группа информационных выходов регистра сдвига 2 соединена с группой информационных входов второго запоминающего устройства 3. Группа адресных входов блока 3 соединена с группой информационных выходов первого запоминающего устройства 8, а группа информационных выходов блока 3 соединена с группой информационных входов второго вычислителя-формирователя 9. Группа адресных входов блока 9 объединена с группой адресных входов первого запоминающего устройства 8 и группой информационных выходов счетчика импульсов 19. Вторая группа информационных входов первого сумматора 12 объединена с группой информационных входов блока оценивания 13 и группой информационных выходов четвертого запоминающего устройства 18. Группа информационных входов блока 18 соединена с группой информационных выходов первого сумматора 12, первая группа информационных входов которого соединена с группой информационных выходов третьего запоминающего устройства 10. Группа информационных входов блока 10 соединена с группой информационных выходов второго вычислителя-формирователя 9. Вход синхронизации блока 9 объединен с входами синхронизации устройства измерения первичных пространственно-информационных параметров 1, первого вычислителя-формирователя 7, первого сумматора 12, блока оценивания 13, входами управления второго, третьего и четвертого запоминающих устройств 3, 10 и 18 соответственно, счетным входом счетчика импульсов 19 и выходом генератора синхроимпульсов 4, а вторая группа информационных входов блока определения координат 14 является третьей установочной шиной 17 устройства определения координат источника радиоизлучения.
Устройство определения первичных пространственно-информационных параметров 1 выполнено содержащим антенную решетку 22, выполненную из М антенных элементов, М>2, реализованных идентичными и расположенными в плоскости пеленгования. Антенный коммутатор 23, изготовленный с М входами и двумя выходами - сигнальным и опорным. Выходы антенных элементов подсоединены к соответствующим входам антенного коммутатора 23. Двухканальный приемник 24, выполненный по схеме с общими гетеродинами, входы которого соединены соответственно с опорным и сигнальным выходами коммутатора 23. Аналого-цифровой преобразователь 25 и блок преобразования Фурье 26, выполненные двухканальными и соединены последовательно. Опорный и сигнальный входы аналого-цифрового преобразователя 25 соединены соответственно с опорным и сигнальным выходами промежуточной частоты двухканального приемника 24. Пятое, шестое и седьмое запоминающие устройства 21, 28 и 30 соответственно, блок формирования эталонных значений разностей фаз 20, блок вычитания 29, умножитель 32, второй сумматор 31 и блок вычисления разностей фаз 27. Первый информационный вход блока вычисления разностей фаз 27 соединен с опорным выходом блока преобразования Фурье 26, сигнальный выход которого соединен с вторым информационным входом блока 27. Группа информационных выходов блока 27 соединена с группой информационных входов шестого запоминающего устройства 28. Группа информационных выходов блока 28 соединена с группой входов вычитаемого блока вычитания 29. Группа входов уменьшаемого блока 29 соединена с группой информационных выходов пятого запоминающего устройства 21. Группа информационных входов блока 21 соединена с группой информационных выходов блока формирования эталонных значений разностей фаз 20, группа информационных входов которого является группой информационных входов устройства измерения первичных пространственно информационных параметров 1 и первой установочной шиной 5 устройства определения координат источника радиоизлучения. Синхровход блока 20 объединен с синхровходами второго сумматора 31, аналого-цифрового преобразователя 25, блока преобразования Фурье 26, блока вычисления разностей фаз 27, блока вычитания 29, умножителя 32, а также входами управления антенного коммутатора 23, пятого, шестого и седьмого запоминающих устройств 21, 28 и 30 соответственно и входом синхронизации устройства измерения первичных пространственно-информационных параметров 1. Группа информационных выходов блока вычитания 29 поразрядно соединена с первой и второй группами информационных входов умножителя 32. Группа информационных выходов блока 32 соединена с группой информационных входов второго сумматора 31, группа информационных выходов которого соединена с группой информационных входов седьмого запоминающего устройства 30. Группа информационных выходов блока 30 является группой информационных выходов устройства измерения первичных пространственно-информационных параметров 1.
Рассмотрим работу заявляемого устройства (см. фиг.10). Предварительно на подготовительном этапе зона контроля ΔF разбивается на N элементарных зон привязки (см. фиг.16). Площадь зоны привязки S0 определяется заданной точностью измерения координат источника радиоизлучения {ΔX, ΔY}. Определяются координаты местоположения центров элементарных зон привязки {X, Y}n, а каждой элементарной зоне привязки присваивается порядковый номер n (см. фиг.1б, в). Данные операции легко реализуются на специализированной микропроцессорной сборке и в рамках представленных материалов рассмотрению не подлежат. Результаты выполнения названных операций (а именно номера и координаты центров элементарных зон привязки) поступают на вторую и третью установочные шины 11 и 17 соответственно устройства определения координат ИРИ. В блоках 7 и 14 они записываются в ячейки памяти, номера которых соответствуют номерам элементарных зон привязки.
На следующем этапе рассчитываются эталонные значения первичных пространственно-информационных параметров Δϕm,l,k,эт(fν). Для этого предварительно осуществляется описание пространственных характеристик антенной решетки 22. С этой целью измеряются взаимные расстояния между антенными элементами Am,l антенной решетки 22 (см. фиг.11). Результаты измерений по шине 5 (см. фиг.10) поступают на вход устройства измерения первичных пространственно-информационных параметров 1 (см. фиг.10). Здесь в блоке формирований эталонных значений первичных пространственно-информационных параметров 20 (см. фиг.11) по рассмотренному выше алгоритму вычисляются значения Δϕm,l,k,эт(fν), которые в дальнейшем хранятся в пятом запоминающем устройстве 21 (см. фиг.11 и фиг.2). В процессе работы предлагаемого устройства с помощью блока 1 (22, 23, 24) осуществляется поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. При обнаружении сигнала на частоте fν определяется собственное местоположение подвижного пеленгатора {Хп, Yп) и склонение антенной решетки 22 относительно направления на север ΔΘj,скл. Данную операцию выполняет устройство навигации 6.
Одновременно устройство 1 осуществляет измерение первичных пространственно-информационных параметров Δϕm,l,изм(fν)j (см. фиг.3). Далее в блоке 1 для каждого направления от -π до +π с дискретностью ΔΘk вычисляют разность между эталонными и измеренными значениями первичных пространственно-информационных параметров, полученные разности возводят в квадрат и суммируют (см. фиг.4). Измеренные в блоке 1 значения несоответствия эталонных и измеренных первичных пространственно-информационных параметров в азимутальной области оформляются в виде совокупности коэффициентов KΘ,j,k(fν), которые поступают на информационные входы регистра сдвига 2 в строгом соответствии со значением ΔΘk (номера ячеек регистра сдвига находятся в однозначной зависимости с азимутальным углом ΔΘk, k=1, 2,..., К). После завершения операции измерения ΔΘj,скл в блоке 6 код этого числа поступает на управляющий вход регистра сдвига 2. В результате в блоке 2 осуществляется последовательный сдвиг сумм KΘ,j,k(fν) на величину ±ΔΘj,скл, что соответствует формированию скорректированной последовательности сумм KΘ,j,k,ск(fν). С приходом очередного синхроимпульса на вход управления второго запоминающего устройства 3 последовательность KΘ,j,k,ск(fν) записывается в него по адресам, соответствующим номерам ячеек блока 2.
Основной задачей первого вычислителя-формирователя 7 является формирование матрицы углов W(Θj,k,n)ν. Размерность матрицы определяется размерами зоны контроля и элементарной зоны привязки (см. фиг.1б). Для каждой элементарной зоны привязки n (элемента матрицы углов) в блоке 7 вычисляется соответствующий азимутальный угол Θj,k,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке {Хп, Yп}j - север и {Хп, Yп}j - центр n-й элементарной зоны привязки {X, Y}n (см. фиг.1л, 5). После завершения выполнения названной операции вычисленная матрица углов для точки {Хп, Yп}j переписывается в первое запоминающее устройство 8 (синхроимпульсом генератора 4). В результате блоки 1, 2, 6 и 7 готовы к работе на следующей j+1 точке.
Дальнейшая обработка результатов измерений в точке j осуществляется вторым вычислителем-формирователем 9. С помощью блока 9 формируется матрица измерений Rj(Θk,n)ν, размерность которой находится в строгом соответствии размерности матрице углов W(Θj,k,n)ν. Порядок формирования матрицы Rj(Θk,n)ν следующий. В каждый элемент матрицы углов (хранящейся в блоке 8) записывается соответствующее данному углу значение скорректированной суммы КΘ,j,k,ск(fν) из блока 3. При этом элемент матрицы углов выступает в роли адреса ячейки блока 3, информацию из которой нужно записать в данный элемент при формировании матрицы измерений Rj(Θk,n)ν в блоке 9. Сформированная в блоке 9 матрица измерений Rj(Θk,n)ν переписывается в третье запоминающее устройство 10.
Задачей блоков 10, 12 и 18 является выполнение операции сложения элементов матрицы Rj(Θk,n)ν с соответствующими элементами предшествующей матрицы измерений Rj-1(Θk,n)ν, полученной в результате измерений подвижным пеленгатором в предшествующей j-1 точке {Хп, Yп}j-1.
Проиллюстрируем выше сказанное. Пусть в результате предыдущих j-1 итераций в блоке 18 записано значение матрицы измерений Rj-1(Θk,n)ν. В первом сумматоре 12 выполняется операция поэлементного сложения матриц Rj(Θk,n)ν и Rj-1(Θk,n)ν. Результаты сложения с приходом очередного синхроимпульса переписываются в блок 18 и одновременно поступают на информационные входы блока оценивания 13. После вычисления очередной матрицы измерений Rj+1(Θk,n)ν в блоке 9 последняя записывается в блок 10. С приходом синхроимпульса выполняется очередной цикл сложения матриц измерений Rj+1(Θk,n)ν и Rj(Θk,n)ν, результаты которых через блок 18 поступают на информационные входы блока оценивания 13.
В функции блока 13 входит определение элемента rJ,k,n матрицы измерений Rj(Θk,n)ν, в который записана минимальная сумма Kn(fν). После выполнения заданного числа измерений J на выходе блока 13 формируется код числа rj,k,n, соответствующий номеру элемента матрицы измерений Rj(Θk,n)ν, в котором содержится min Kn(fν). Данный сигнал в конечном счете соответствует номеру элементарной зоны привязки n с наиболее вероятным местоположением ИРИ. Кодовая комбинация n с информационных выходов блока 13 поступает на адресные входы блока определения координат 14. Последний представляет собой блок памяти, в котором в соответствии с номерами элементарных зон привязки (адресами) хранятся координаты их центров {X, Y}n. С поступлением кодовой комбинации n на адресные входы блока 14 на его информационных выходах формируется сигнал с координатами местоположения ИРИ {X, Y}n. Последние поступают на информационные входы устройства отображения 15 для индикации результатов определения координат ИРИ и далее на выходную информационную шину устройства определения координат ИРИ 16.
Рассмотрим порядок измерения первичных пространственно-информативных параметров в устройстве 1. Принимаемые антенной решеткой 22 сигналы на частоте fν поступают на соответствующие входы антенного коммутатора 23. Антенный коммутатор 23 обеспечивает синхронное подключение в едином промежутке времени любых пар антенных элементов к опорному и сигнальному выходам. В результате последовательно во времени на оба сигнальных входа приемника 24 поступают сигналы со всех возможных пар АЭ решетки 22 (см. фиг.12). При этом все АЭ периодически выступают в качестве сигнальных, так и в качестве опорных (при условии использования полнодоступного антенного коммутатора 23). Этим достигается максимальный набор статистики о пространственных параметрах электромагнитного поля.
Сигналы (см. фиг.7а), поступившие на вход приемника 24, усиливают, фильтруют и переносят на промежуточную частоту (см. фиг.7б), например 10,7 МГц. С опорного и сигнального выходов промежуточной частоты приемника 24 сигналы поступают на соответствующие входы аналого-цифрового преобразователя 25, где синхронно преобразуются в цифровую форму (см. фиг.7в). Полученные цифровые отсчеты сигналов антенных элементов Am и Al в блоке 25 перемножаются на цифровые отсчеты (см. фиг.7д, ж) двух гармонических сигналов одной и той же частоты (см. фиг.6г, е), сдвинутые относительно друг друга на угол π/2. На фиг.7з представлены результаты выполнения этой операции (выражения 5 и 6).
В результате в блоке 25 формируются четыре последовательности отсчетов (квадратурные составляющие сигналов от двух антенных элементов Am и Al). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 25 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала (фиг.7з, и) на соответствующие отсчеты временного окна (см. фиг.7к). Результаты выполнения в блоке 25 этой операции приведены на фиг.7л, м.
На завершающем этапе в блоке 25 формируют две комплексные последовательности отсчетов путем попарного объединения соответствующих отсчетов скорректированных последовательностей, которые поступают на соответствующие входы блока преобразования Фурье 26.
В результате выполнения в блоке 26 операции (8) получают две преобразованные последовательности (см. фиг.7н). Последние характеризуют спектры сигналов, принимаемых в антенных элементах Am и Al, а следовательно, и их фазовые характеристики. Однако этого недостаточно для измерения разности фаз сигналов в парах антенных элементов Am и Al. Последнее предполагает вычисление функции взаимной корреляции сигналов (выражение 9) и на ее основе определение Δϕm,l(fν)j в соответствии с выражением 10. Эти операции и выполняются блоком 27, на выходах которого формируются значения первичных пространственно-информационных параметров Δϕm,l(fν)j для всех возможных сочетаний пар антенных элементов m, l=1,..., М; m≠l. Значения параметров Δϕm,l(fν)j, измеренные в блоке 27, записываются в шестое запоминающее устройство 28.
Выполнение этой операции соответствует формированию массива измеренных первичных пространственно-информационных параметров, приведенных на фиг.3.
Основное предназначение блоков 20, 21, 28, 29, 30, 31 и 32 состоит в том, чтобы оценить степень отличия измеренных параметров Δϕm,l,изм(fν)j (см. фиг.3) от эталонных значений Δϕm,l,эт(fν) (см. фиг.2), рассчитанных для всех направлений прихода сигнала ΔΘk. Данная операция осуществляется в соответствии с алгоритмом, приведенным на фиг.4 следующим образом. Эталонные значения первичных пространственно-информационных параметров, хранящиеся в запоминающем устройстве 21, поступают на вход уменьшаемого блока вычитания 29. На вход вычитаемого блока 29 поступают измеренные значения Δϕm,l,изм(fν)j с выхода блока 28. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар АЭ. Например, из Δϕ3,9,изм(fν)j поочередно вычитаются только значения Δϕ3,9,эт(fν) для всех направлений прихода сигнала ΔΘk.
На следующем этапе полученные разности возводятся в квадрат в блоке умножения 32. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значение. В противном случае могла возникнуть бы ситуация, когда сумма положительных и отрицательных разностей Δϕm,l,изм(fν)j-Δϕm,l,эт(fν) компенсировали друг друга. Для возведения в квадрат каждый результат вычитания умножается на себя в блоке 32. Полученные квадраты разностей складываются во втором сумматоре 31 и записываются в седьмое запоминающее устройство 30. В результате на выходе блока 1 формируется набор сумм KΘ,j,k(fν), используемых в дальнейшей работе устройства. Синхронизация работы названных элементов осуществляется с помощью импульсов генератора синхроимпульсов 4.
В устройстве, реализующем предложенный способ, используются известные элементы и блоки, описанные в научно-технической литературе.
Устройство измерения первичных пространственно-информационных параметров 1 реализуется в соответствии с фиг.11. Варианты реализации антенных элементов и антенной решетки 22 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь, 1997; Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p.). Для подвижного пеленгатора (с учетом массогабаритных ограничений, типичных для него) целесообразно использовать один из типов антенн: симметричные и несимметричные вибраторы (объемные вибраторы), дискоконусные антенны, биконические антенные элементы (АЭ) и др. Выбор антенных элементов определяется заданным частотным диапазоном ΔF (коэффициентом перекрытия), конструктивными особенностями антенной решетки. В общем случае размещение АЭ в горизонтальной плоскости может быть произвольным. Количество используемых антенных элементов М и расстояния между ними определяются заданной точностью местоопределения {ΔZ, ΔY} и как следствие - точностью измерения пространственных параметров, диапазоном рабочих частот ΔF и эффектом взаимного влияния АЭ друг на друга. Последние определяет минимальное расстояние между АЭ решетки 22. Максимально возможные габариты антенной решетки подвижного пеленгатора в горизонтальной плоскости, как правило, ограничиваются размерами крыши транспортного средства, а в вертикальной плоскости - высотой радиопрозачного купола (см. фиг.13).
Для обеспечения наиболее высокой и равной со всех направлений точности пеленгования целесообразно использование АР 22 с кольцевым (эллиптическим) размещением АЭ (см. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964. - 640 с.) с максимально возможным радиусом.
Важным аспектом выполнения АР 22 является реализация коэффициента перекрытия Кпер частотного диапазона. В случаях, когда Кпер задается равным 10 и более, необходим переход к использованию АР с двойной и более кольцевой структурой.
Анализ зависимости количества АЭ М и Кпер (по уровню взаимного влияния АЭ в нижней части частотного диапазона частот и неоднозначности получаемых оценок в его верхней части) показал, что для устранения негативных явлений и их влияния на точность пеленгования при Кпер=10 необходимо иметь не менее 8 АЭ совместно с полнодоступным антенным коммутатором и более 14 АЭ - при использовании неполнодоступного коммутатора.
Антенный коммутатор 23 обеспечивает синхронное подключение в едином промежутке времени любых пар АЭ к опорному и сигнальному выходам. Реализация АК 23 широко известна (см. Вениаминов В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.; Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987. - 120 с.).
Двухканальный приемник 24 может быть реализован с помощью двух полупрофессиональных приемников IC-R8500 фирмы ICOM (см. Communication Receiver IC-R8500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используются одновременно в качестве первого и второго гетеродинов соответственно второго приемника. Кроме того, в качестве приемника 24 могут попарно использоваться и другие приемники фирмы ICOM: IC-R7000, IC-PCR1000.
Двухканальные аналого-цифровой преобразователь 25 и блок преобразования Фурье 26, а также блок вычисления разностей фаз 27 и шестое запоминающее устройство 28 реализуются с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP-21062. Руководство пользователя (см. e-mail: insys@arc.ru www-сервер www.insys.ru). Субмодуль ADMDDC2WB реализует функции блока 24 и содержит микросхемы DIGITAL DOWN CONVERTER (DDC) AD6620 фирмы Analog Devices для извлечения части полосы частот из широкой входной полосы сигнала на промежуточной частоте 10,7 МГц приемника 24 IC-8500, преобразование этой полосы в полосу модулирующих частот и вывод ее в квадратуре (выражение 5 и 6). Данная операция осуществляется путем умножения оцифрованного сигнала на квадратурное опорное колебание внутреннего генератора DDC.
Субмодуль цифрового приема ADMDDC2WB используется в несущих платах типа ADP6015A, ADP60PCI, ADP62PCI. Базовый модуль на базе платы ADP60PCI v.3.2 на процессоре Shark ADSP-21062 реализует функцию дискретного преобразования Фурье (выражение 8, блок 26), операцию умножения на комплексно-сопряженную пару отсчетов каналов (выражение 7, блок 27), нахождение разности фаз сигналов Δϕm,l,изм(fν)j (выражение 10, блок 27), а также запоминание измеренных значений разностей фаз (функция блока 28).
Второй сумматор 31 и блок вычитания 29 реализуется по известным схемам (см. Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Пятое, шестое и седьмое запоминающие устройства 21, 28 и 30 соответственно представляют собой буферные запоминающие устройства (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.).
Умножитель 32 реализует операцию возведение в квадрат, а его выполнение освещено в книге Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.
Блок формирования эталонного набора первичных пространственно-информационных параметров 20 предназначен для создания таблиц эталонных значений разностей фаз Δϕm,l,эт(fν) для различных пар антенных элементов, m, l=1, 2,..., М; m≠l, различных поддиапазонов частот V и различных направлений прихода сигнала ΔΘk с заданной дискретностью, к=1, 2,..., К; K·ΔΘk=2π в соответствии с фиг.2. На подготовительном этапе по первой установочной шине 5 задаются следующие исходные данные:
сектор обработки по азимуту {Θmin, Θmax};
точность нахождения углового параметра ΔΘ;
топология размещения антенных элементов {dm,l};
диапазон частот ΔF и ширина поддиапазона частот Δf.
Величины {Θmin, Θmax} зависят от маршрута движения подвижного пеленгатора относительно зоны контроля. Точность нахождения углового параметра ΔΘ определяется заданной точностью местоопределения {ΔX, ΔY}, размещением подвижного пеленгатора относительно зоны контроля и ограничивается инструментальной точностью. Последняя в свою очередь определяется типом (размерами и геометрией) используемой АР 22, характеристиками АЭ, частотным диапазоном ΔF, условиями распространения радиоволн, видом модуляции сигнала и др. Задача блока 20 состоит в том, чтобы для данного подвижного пеленгатора, каждого частотного поддиапазона Δfν, заданной топологии АР 22 с дискретностью по азимуту ΔΘk рассчитать идеальные (эталонные) значения разностей фаз для Δϕm,l,эт(fν) для всех возможных пар антенных элементов Am,l.
Блок 20 может быть выполнен в виде автомата на базе высокопроизводительного 16-ти разрядного микропроцессора К1810ВМ86 (см. Вениаминов В.Н. и др. Микросхемы и их применение: Справочное пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989. - 240 с.; Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.), работающего в соответствии с алгоритмом, приведенным на фиг.14.
Характеристики регистра сдвига 2, а следовательно, и особенности его реализации, зависят от двух величин:
дискретности измерений в азимутальной плоскости первичных пространственно-информационных параметров ΔΘk, к=1, 2,..., К, т.е. от значения К;
размерности значений сумм KΘ,j,k(fν).
Если положить, что ΔΘk=1°, то K=360, следовательно, потребуется реализация регистра сдвига с количеством ячеек 360. Для реализации такого регистра потребуется последовательное подключение набора микросхем, например 155 серии 155ИР1 (см. Справочник по интегральным микросхемам / Б.В.Тарабрин и др.; Под. ред. Б.В.Тарабрина. - 2-е изд., перераб. и доп. - М.: Энергия, 1980. - 816 с.). Размерность сумм KΘ,j,k(fν) определит количество параллельно подключаемых регистров длиной К.
Первое, второе, третье и четвертое запоминающие устройства 8, 3, 10 и 18 соответственно представляют собой буферные запоминающие устройства, реализация которых известна (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.).
Построение генератора синхроимпульсов 4 известно и широко освещено в литературе (Радиоприемные устройства: учебное пособие по радиотехнике. Спец. ВУЗов / Ю.Т.Давыдов и др.; М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсатор помех: Часть II. В.В.Никитченко. - Л.: ВАС. - 1990. - 176 с.; Вениаминов В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.).
Устройство навигации 6 решает две основные задачи:
определяет положение подвижного пеленгатора в момент измерения первичных пространственно-информационных параметров {ХП, YП}j;
определяет склонение антенной решетки подвижного пеленгатора относительно направления на север ΔΘj,скл в момент измерения параметров.
Первая из названных функций может быть реализована с помощью GPS навигатора (см. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя. E-mail: admin@connect.ru, web:// www.jj.connect.ru). Для подключения выхода (первый выход блока 6) GPS12XL к информационному входу первого вычислителя-формирователя 7 используется кабель передачи данных с 9-ти штырьковым разъемом типа "D" (номер изделия 010-10141-00).
Склонение антенной решетки подвижного пеленгатора относительно направления на север ΔΘj,скл может быть измерено с помощью гирокомпаса (см. Цифровой компас гироскопический лазерный. ЭО 98.06.001 ТО - АОЗТ объединение "ЭОС", Москва, 1998 г.). Выход гирокомпаса является вторым выходом устройства навигации 6.
Выполнение обеих функций блока 6 возможно с помощью одного GPS12XL. Однако в данном случае потребуется использование дополнительного согласующего устройства, подключенного в выходу GPS12XL. Данное устройство должно обеспечить преобразование кодовой комбинации ΔΘj,скл в соответствующее количество импульсов, поступающих в дальнейшем на вход управления регистра сдвига 2.
Основное назначение первого вычислителя-формирователя 7 состоит в формировании матрицы углов W(Θj,k,n)ν. Структурная схема блока 7 приведена на фиг.15. Оно содержит восьмое, девятое и десятое запоминающие устройства 33, 35 и 36 соответственно и вычислитель 34. Работа блока 7 осуществляется следующим образом. На подготовительном этапе в блок 36 по соответствующим адресам записываются координата центров элементарных зон привязки {X, Y}n. Данная операция осуществляется через вторую установочную шину 11.
Пусть в процессе работы подвижного пеленгатора на j-й точке выполняется измерения первичных пространственно-информационных параметров. Координаты местоположения пеленгатора в j-й точке {ХП, YП}j поступает из блока 6 и записывается в блоке 33 (блоки 33 и 36 представляют собой буферные запоминающие устройства). Информационные выходы блока 33 и 36 соединены соответственно с первой и второй группами информационных входов вычислителя 34. Последний представляет собой микропроцессор, работающий в соответствии с алгоритмом, приведенным на фиг.16. Последовательно, начиная с первой элементарной зоны привязки, из блока 36 извлекается информация о координатах центров элементарных зон привязки {X, Y}1, {X, Y}2,..., {Х, Y}N. Последняя обрабатывается совместно с координатами пеленгатора {ХП, YП}j, а результаты вычислений Θj,k,n записываются в соответствующую ячейку памяти блока 35. После прохождения в блоке 34 N циклов вычислений в блоке 35 завершается формирование матрицы углов Wj(Θk,n)ν. Реализация запоминающих устройств 33, 35 и 36 известна (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.). Вычислитель 34 может быть выполнен на базе микропроцессора К1810ВМ86 (см. Вениаминов В.Н. и др. Микросхемы и их применение: Справочное пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989. - 240 с.; Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Второй вычислитель-формирователь 9 предназначен для формирования матрицы измерений Rj(Θk,n)ν, размерность которой находится в строгом соответствии размерности матрицы W(Θj,k,n)ν. Названную операцию блок 9 выполняет совместно с блоками 3, 8 и 19. В функциональном аспекте блок 9 представляет собой блок оперативной памяти.
Рассмотрим порядок формирования матрицы измерений Rj(Θk,n)ν. Пусть первый пришедший импульс генератора 4 поступил на счетный вход счетчика импульсов 19. На его выходах формируется кодовая комбинация, соответствующая числу 1. Данная кодовая комбинация поступает на адресные входы блоков 8 и 9. В результате на информационных выходах блока 8 присутствует кодовая комбинация, соответствующая значению угла Θj,k,1, являющаяся первым элементом ωj,k,1 матрицы углов W(Θj,k,1)ν. Это стало возможным в результате воздействия того же самого синхроимпульса блока 4 и на вход управления блока 8. Кодовая комбинация Θj,k,1 (кратная величине ΔΘk) поступает на адресные входы второго запоминающего устройства 3. В результате на информационных выходах последнего (под воздействием того же импульса синхронизации) формируется кодовая комбинация числа KΘj,k.ск(fν), соответствующая углу Θj,k,1. Последняя переписывается в первую ячейку памяти блока 9. С приходом очередного синхроимпульса блока 4 содержимое счетчика импульсов 19 увеличивается на 1. На его выходе формируется код числа 2. Начинается новый цикл записи скорректированной суммы KΘj,k,ск(fν) во вторую ячейку блока 9 из блока 3. Номер ячейки блока 3, в которой хранилось значение KΘ,j,k,ск(fν), определяется кодовой комбинацией Θj,k,2, поступающей с информационных выходов блока 8. После выполнения N циклов записи в блок 9 формирование матрицы Rj(Θk,n)ν завершается. Следует отметить, что емкость счетчика импульсов 19 выбирается равной N.
Реализация второго вычислителя-формирователя 9 известна. Последний может быть реализован на базе динамического оперативного запоминающего устройства (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.).
Реализация счетчика импульсов 19 трудностей не вызывает. Он может быть реализован на микросхемах ТТЛ серии, напримет 155ИЕ2 (см. Справочник по интегральным микросхемам / Б.В.Тарабрин и др.; Под. ред. Б.В.Тарабрина. - 2-е изд., перераб. и доп. - М.: Энергия, 1980. - 816 с.). Необходимая емкость блока 19 обеспечивается за счет последовательного подключения необходимого количества микросхем 155ИЕ2.
Первый сумматор 12 реализуется по известной схеме (см. Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок оценивания 13 предназначен для определения номера ячейки запоминающего устройства 18 с минимальной суммой Kn(fν), соответствующей номеру элементарной зоны привязки n, в которой наиболее вероятно нахождение ИРИ.
Структурная схема блока оценивания 13 приведена на фиг.17. Он содержит блок поиска минимума 37, второй счетчик импульсов 38, восьмое запоминающее устройство 39, блок элементов "И" 40 и дешифратор 41. Работа блока оценивания 13 осуществляется следующим образом. На счетный вход счетчика 38 и синхровход блока поиска минимума 37 поступают импульсы с выхода генератора 4. На информационных входах блока поиска минимума поочередно присутствуют коды чисел Kn(fν), n=1, 2,..., N. Данная операция синхронизирована поступлением импульсов генератора 4 на соответствующие входы блоков 12 и 13 (37). Если в результате выполнения операции сравнения в блоке 37 в момент времени t1 принимается решение о том, что текущее содержимое очередной ячейки Kn(fν) меньше предыдущих, на выходе блока 37 формируется импульс управления, поступающий на вход управления запоминающего устройства 39. В блок 39 записывается содержимое счетчика 38, соответствующее номеру ячейки памяти блока 18 с min Kn(fν). Последняя соответствует n-й элементарной зоне привязки. Процесс сравнения в блоке 37 продолжается далее до полного перебора всех сумм, хранящихся в блоке 18 (в матрице измерений Rj(Θk,n)ν, для избежания принятия решения по локальному минимуму). По очередному минимальному значению, обнаруженному блоком 37, в запоминающее устройство 39 записывается номер элементарной зоны привязки n (содержимое счетчика 38). Емкость счетчика 38 соответствует количеству элементарных зон привязки N. После поступления на вход счетчика 38 N импульсов на выходе дешифратора 41 формируется сигнал, который обнуляет счетчик 38 и одновременно поступает на управляющие входы блока элементов "И" 40. В результате номер элементарной зоны привязки n, соответствующий min Kn(fν), поступает на вход блока определения координат 14.
Реализация блока поиска минимума 37 известна. Он может быть реализован по пирамидальной схеме с использованием быстродействующих компараторов (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.). Счетчик импульсов 38 емкостью N может быть реализован с помощью последовательного подключения необходимого количества микросхем 155ИЕ1 (см. Справочник по интегральным микросхемам / Б.В.Тарабрин и др.; Под. ред. Б.В.Тарабрина. - 2-е изд., перераб. и доп. - М.: Энергия, 1980. - 816 с.).
Блок определения координат 14 представляет собой перепрограммируемое постоянное запоминающее устройство, например на основе микросхем серии КМ 1609 или КМ558 (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.). На подготовительном этапе по шине 17 осуществляется запись координат центров элементарных зон привязки {X, Y}n в блок 14. При этом адреса ячеек памяти блока 14 совпадают с номерами элементарных зон привязки. В процессе работы заявленного устройства на адресные входы блока 14 поступает код числа с номером элементарной зоны привязки, в которой наиболее вероятно размещение ИРИ. В соответствии с данной кодовой комбинацией на выходе блока 14 формируется кодовая комбинация, соответствующая координатам соответствующей элементарной зоны привязки {X, Y}n.
Реализация устройства отображения 15 известна и трудностей не вызывает (см. Быстров А.Ю. и др. Сто схем с индикаторами / Быстров А.Ю. и др. - М.: Радио и связь, 1990. - 112 с.; Пароль Н.В., Кайдалов С.А. Знакосинтезирующие индикаторы и их применение: Справочник. - М.: Радио и связь, 1998. - 128 с.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505832C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
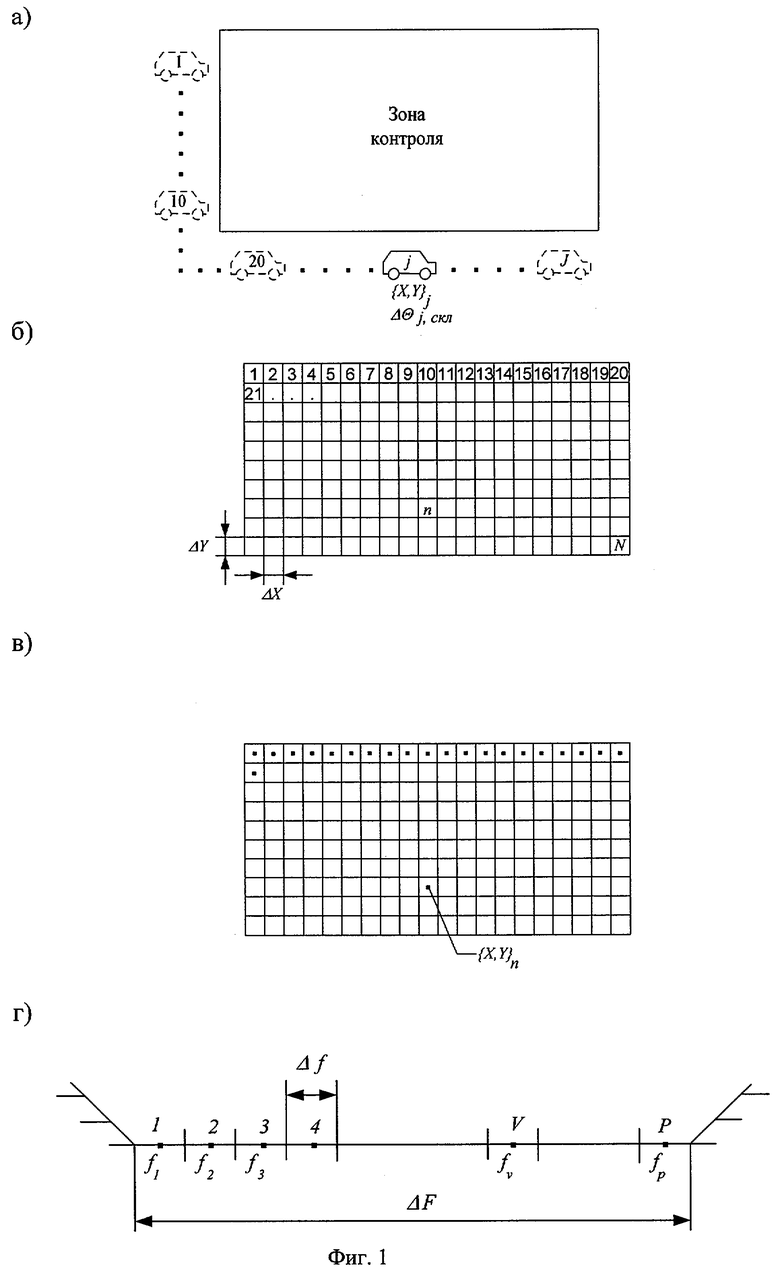
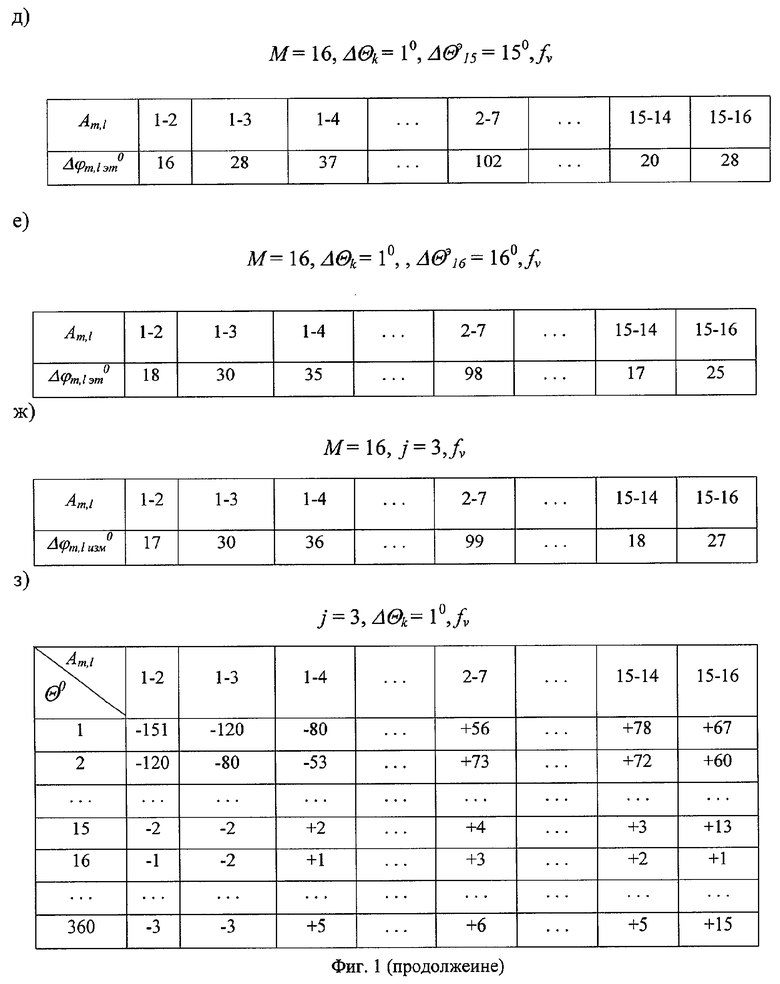
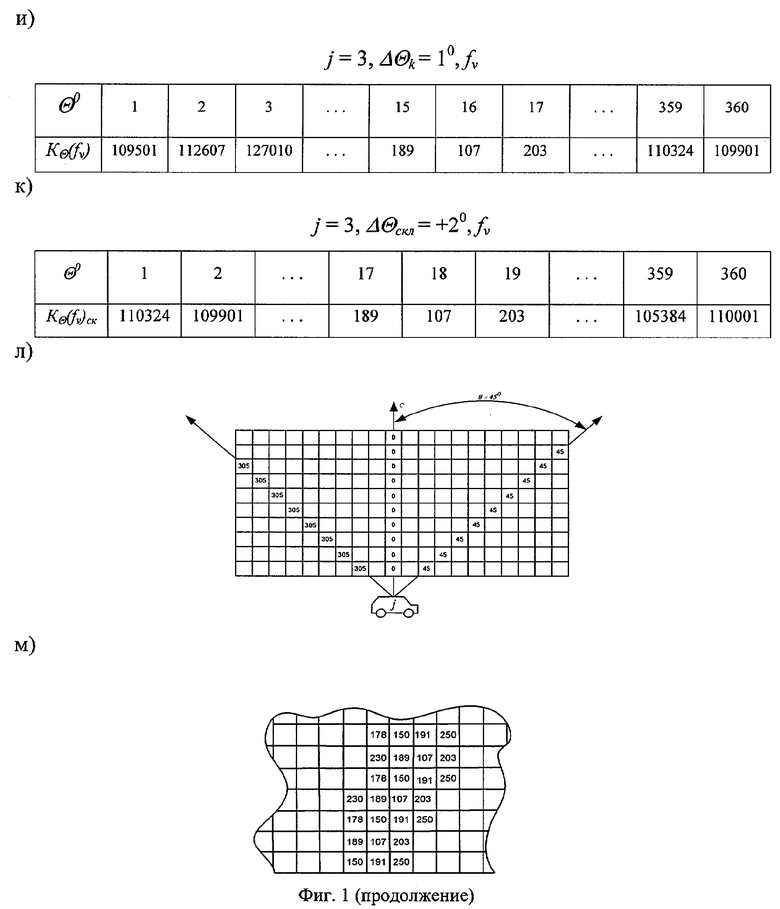
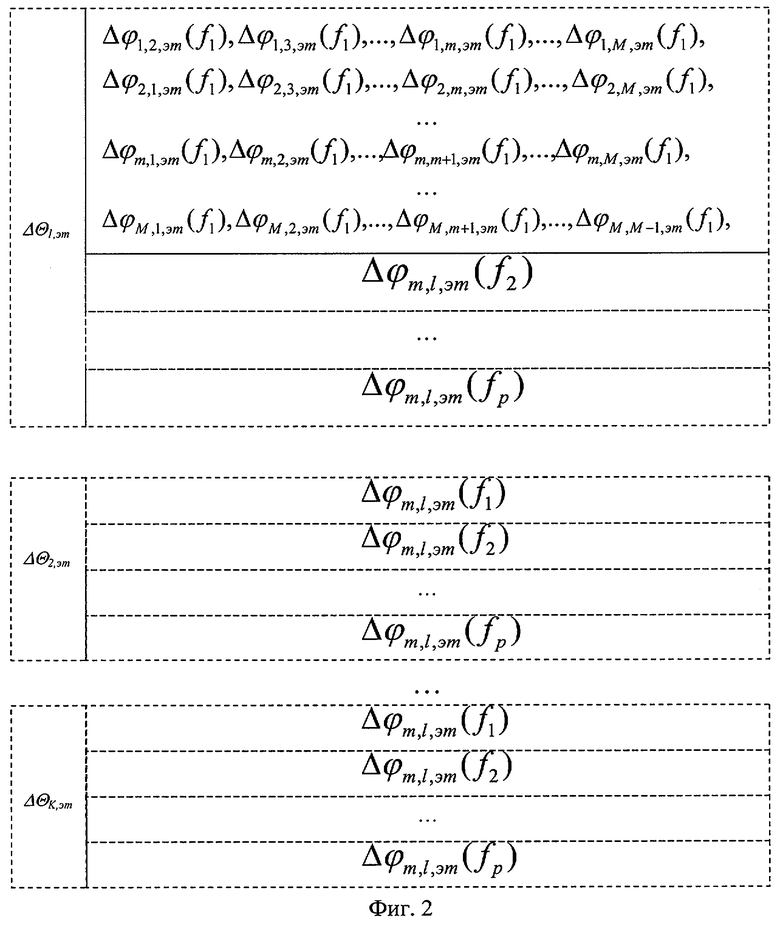
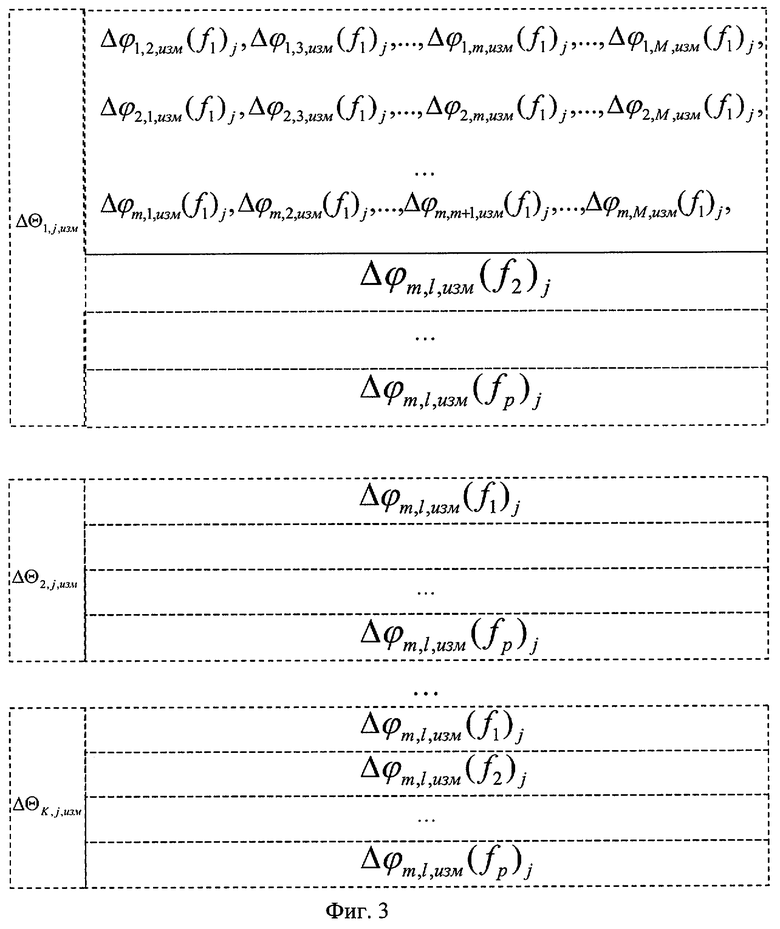

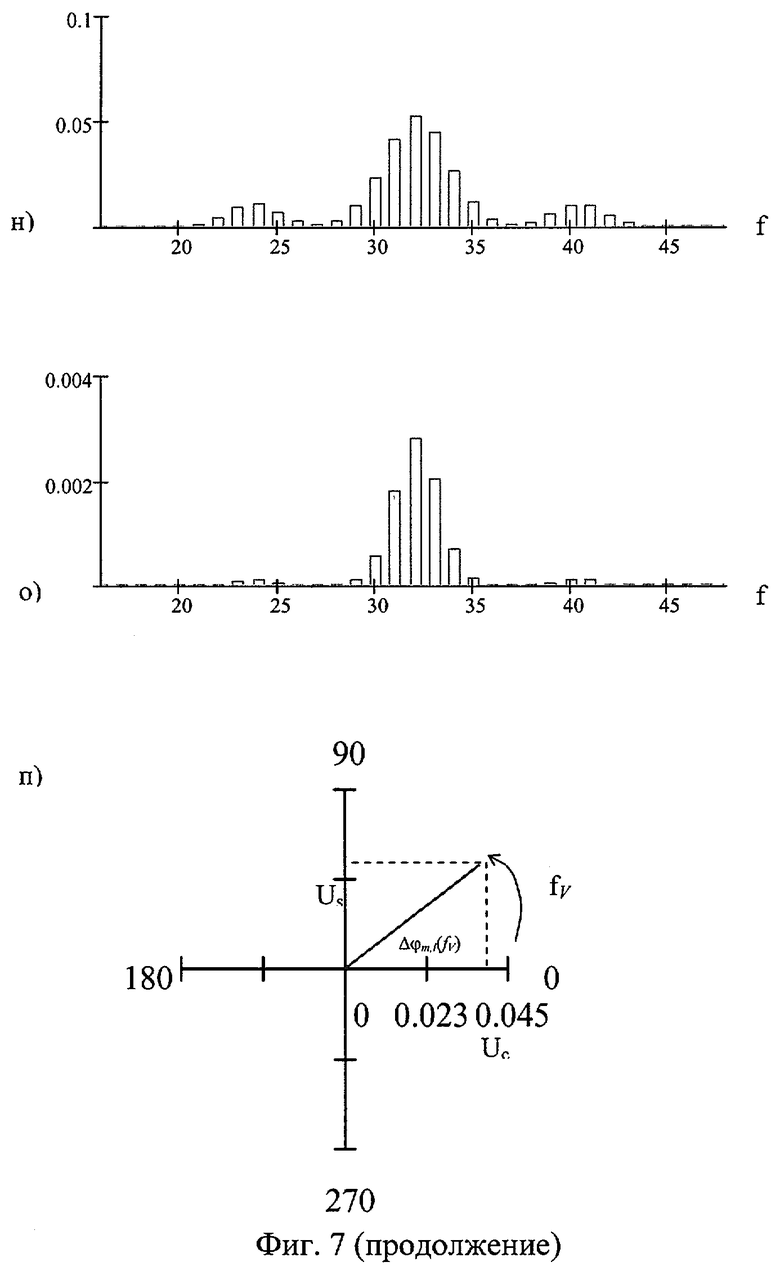
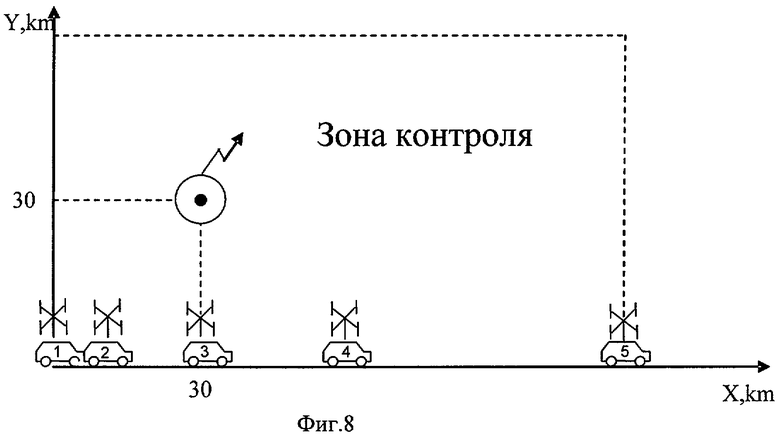
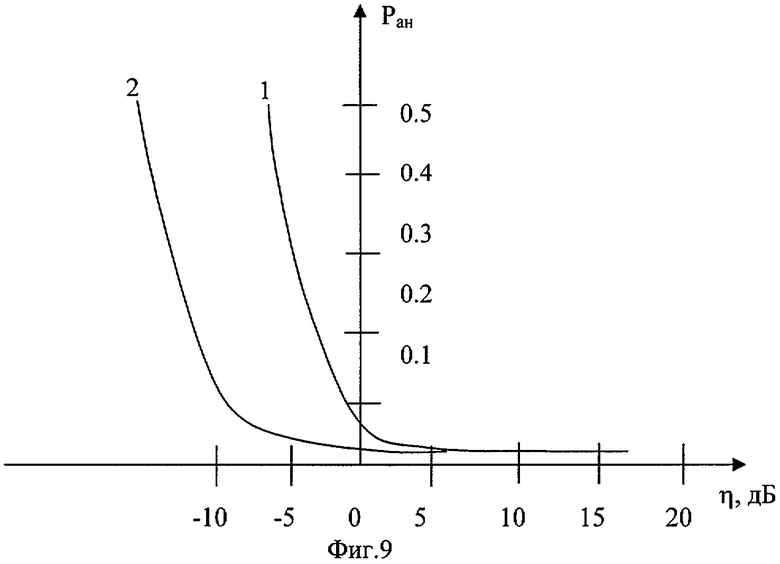
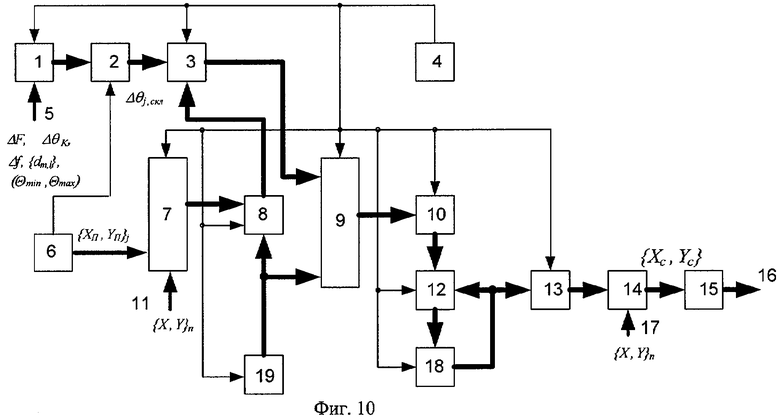
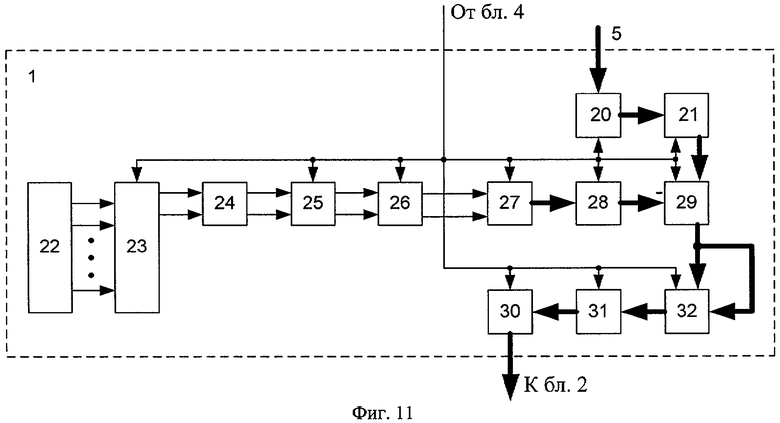
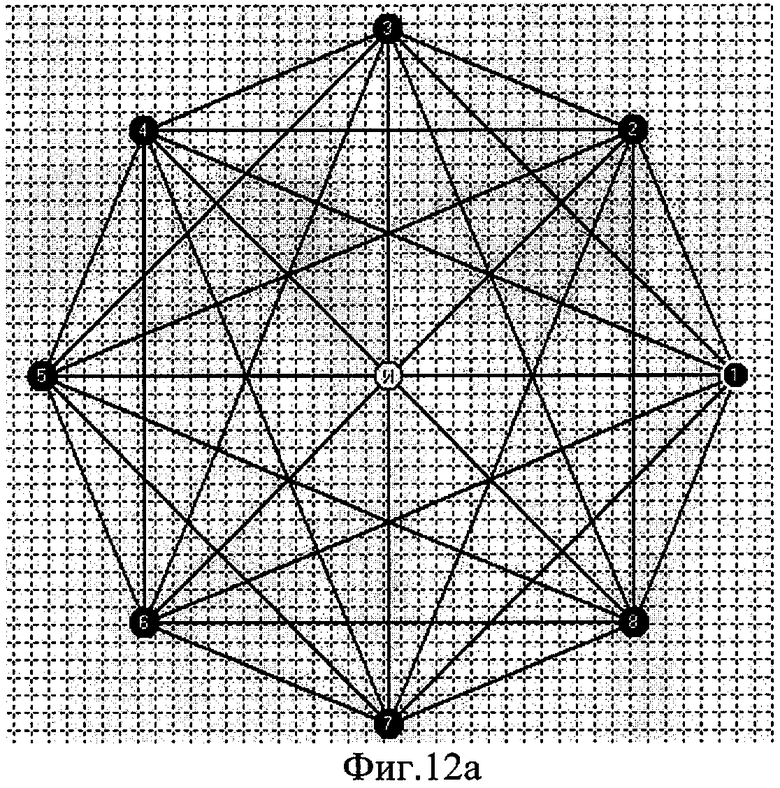
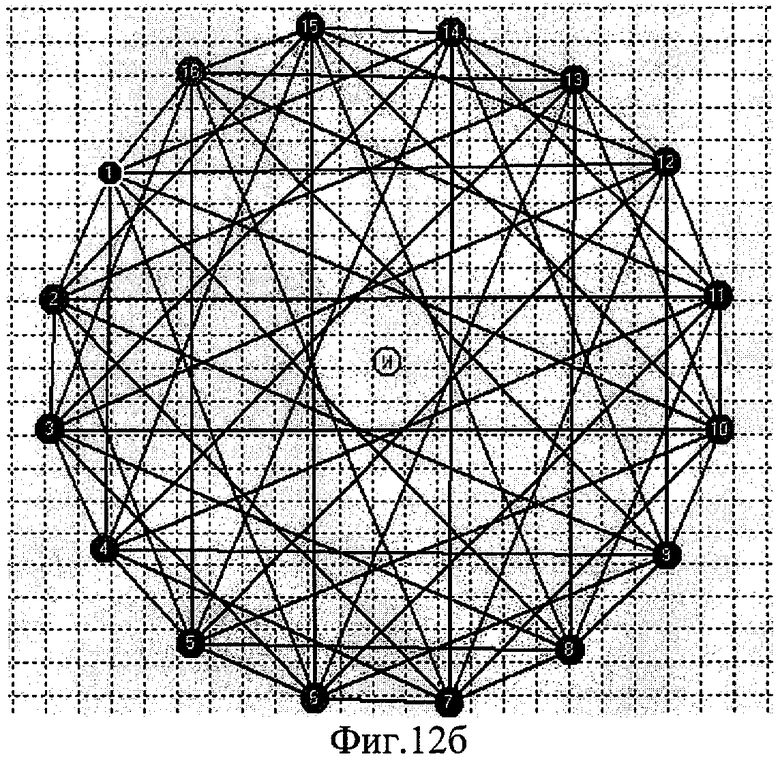
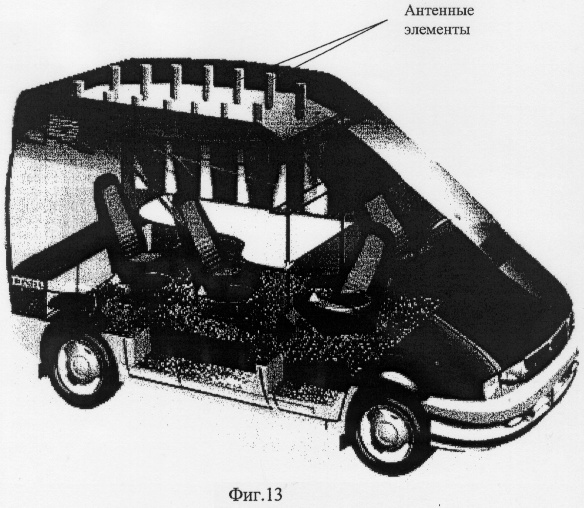
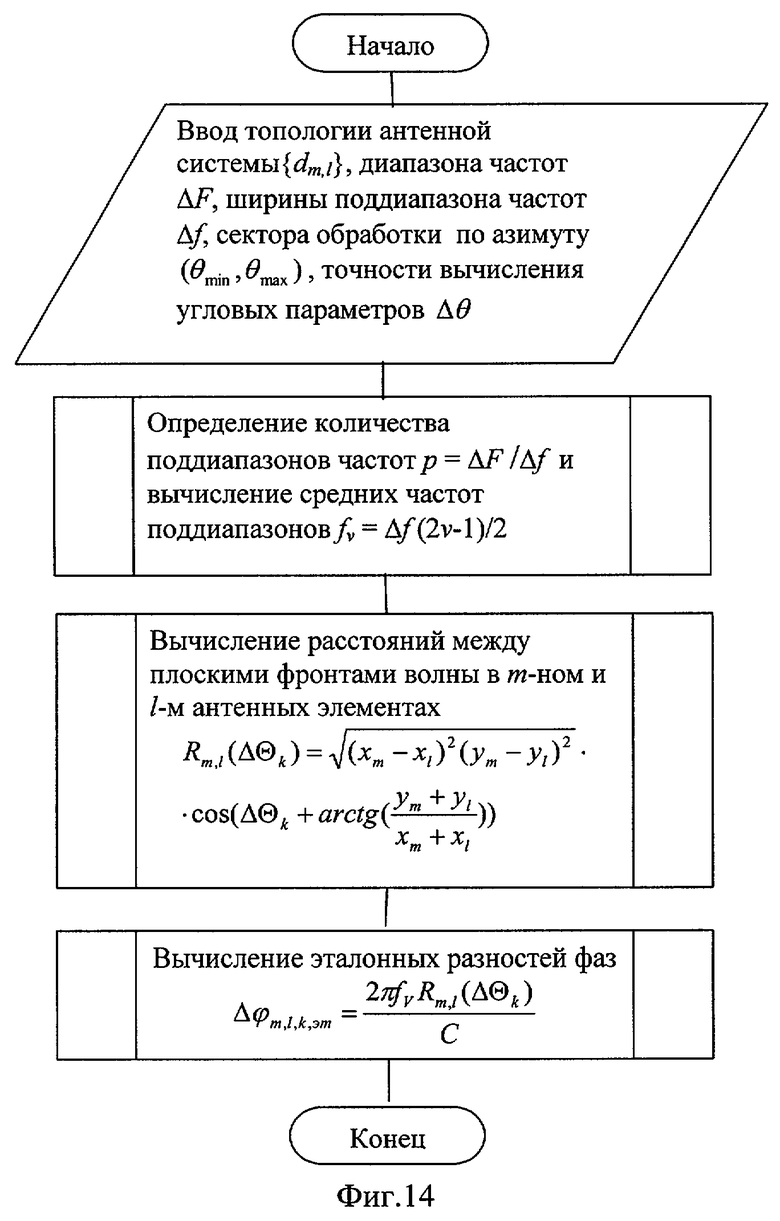
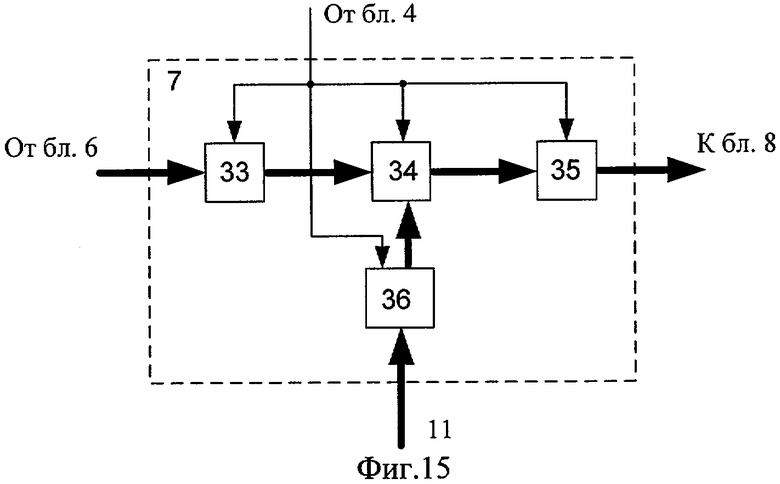
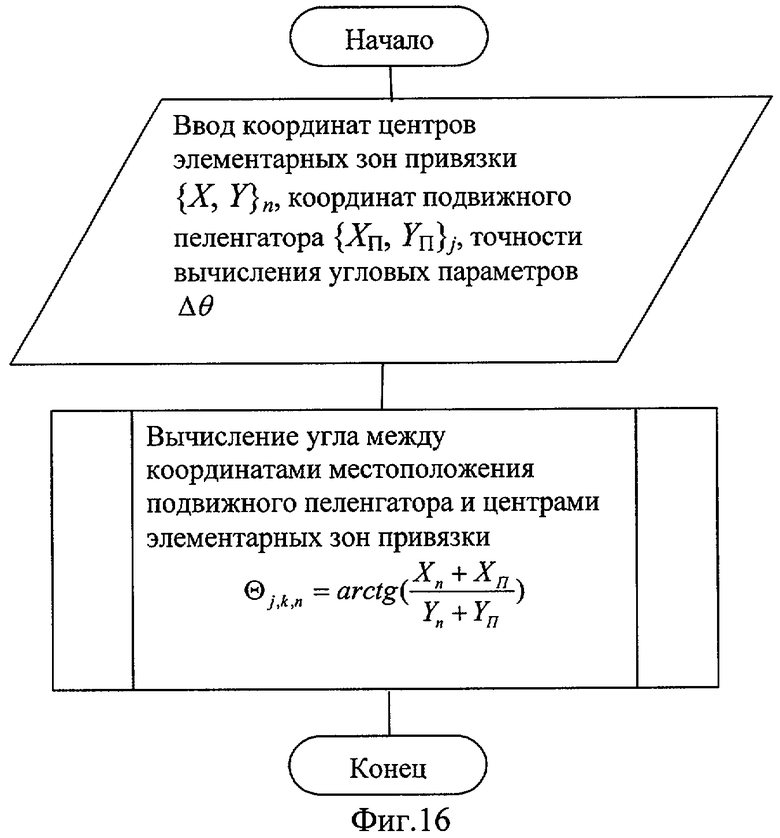
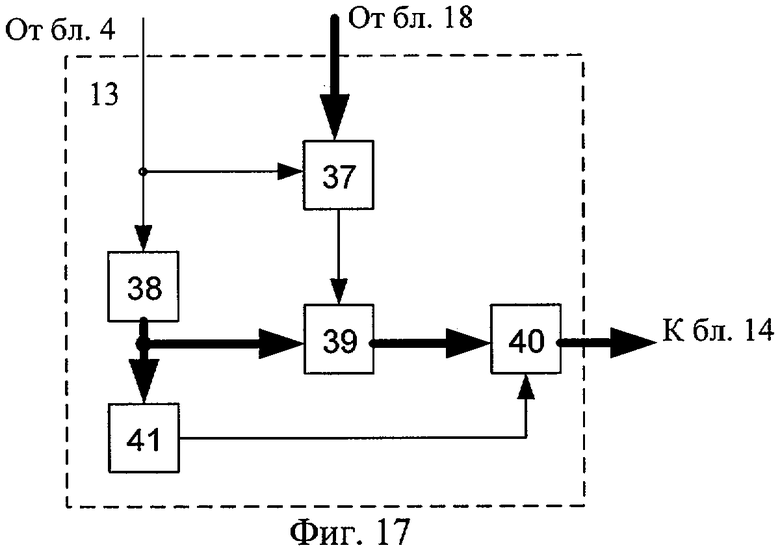
Изобретения относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения априорно неизвестных источников радиоизлучений с помощью одного пеленгатора. Техническим результатом является повышение точности местоопределения путем применения одноэтапной обработки. Устройство определения координат источника радиоизлучения, реализующее способ, содержит устройство навигации, первый вычислитель-формирователь, первое запоминающее устройство, генератор синхроимпульсов, блок оценивания, блок определения координат и устройство отображения, при этом дополнительно введены устройство измерения первичных пространственно-информационных параметров, регистр сдвига, второе запоминающее устройство, второй вычислитель-формирователь и счетчик импульсов, третье и четвертое запоминающие устройства и сумматор. 2 н. и 3 з.п. ф-лы, 18 ил.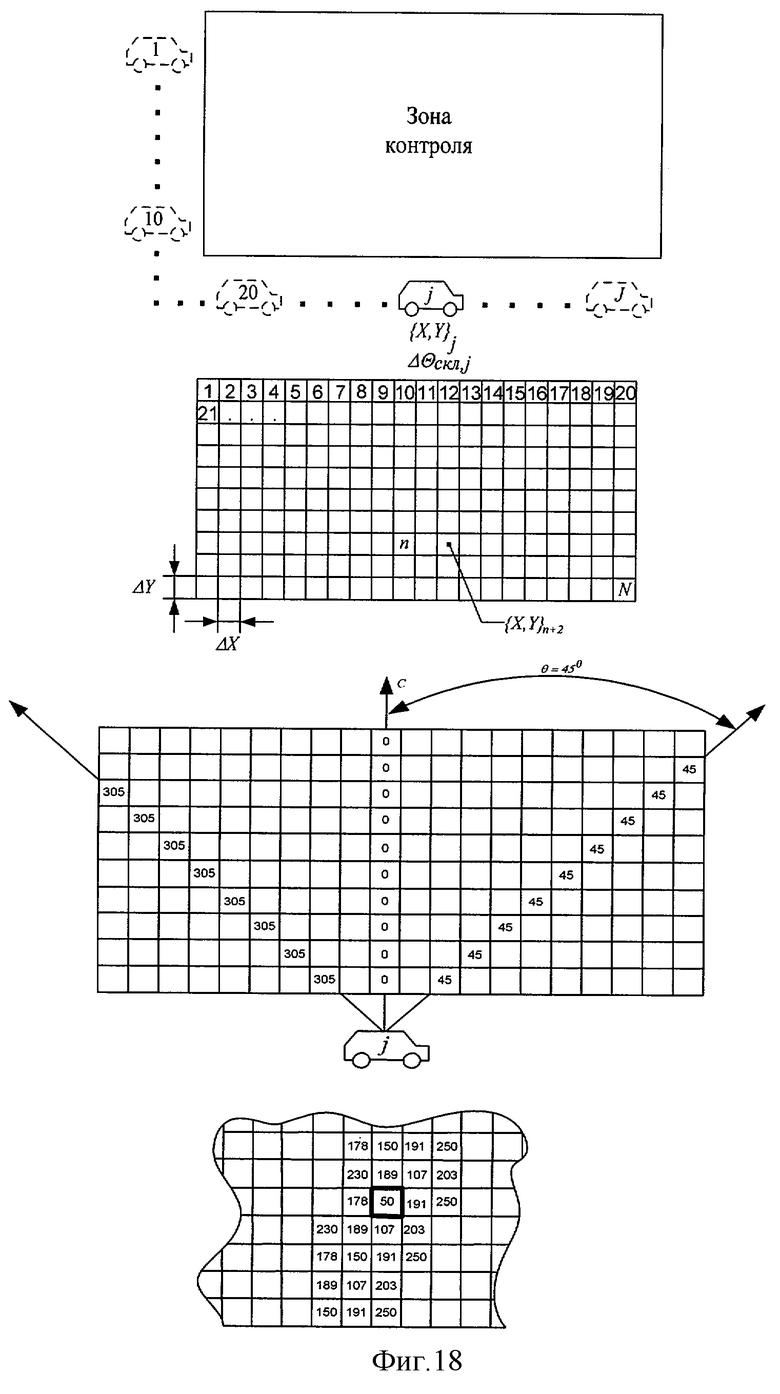
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
| US 4639733 A, 27.01.1987 | |||
| US 4062015 A, 06.12.1977 | |||
| DE 4014407 A, 07.11.1991. | |||

