Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к хирургическим роботам, в частности к роботизированной хирургической станции.
Уровень техники
Операционные палаты в настоящее время в основном организованы на основе окружения, сформированного в эпоху 19-го столетия, при отсутствии роботов. Вместе с введением лапароскопической хирургии и последующего ее комбинирования с роботами начинает существование новая эра в хирургии и структуры операционной палаты.
В настоящее время известны хирургические роботы, например, такие как роботизированная хирургическая система «да Винчи» ("da Vinci"), разработанная хирургическим институтом (Institute Surgical, Inc.). Роботизированная хирургическая система «да Винчи» содержит хирургический робот, обеспеченный определенным количеством манипуляторов робота или рабочих органов, к которым присоединяются хирургические инструменты. Робот размещается сбоку от операционного стола и дистанционно управляется хирургом посредством станции управления, содержащей специальные рычаги и педали, позволяющие хирургу выборочно приводить в действие роботизированные манипуляторы и хирургические инструменты.
Также известны другие роботизированные хирургические системы. Например, документ US 2013/0178870 раскрывает роботизированную хирургическую систему для поддержки пациента и роботизированный хирургический манипулятор. Роботизированная хирургическая система включает в себя основание, колонну, присоединенную к основанию на первом конце и проходящую вертикально вверх к противоположному второму концу, и структуру для прикрепления, присоединенную ко второму концу колонны. Стол для пациента присоединяется к структуре для прикрепления. Опорный рычаг робота проходит вертикально вверх от первого конца ко второму концу. Опорный рычаг робота может дополнительно проходить горизонтально над столом для пациента, чтобы поддерживать роботизированный хирургический манипулятор, который будет проходить в целом в направлении вниз от опорного рычага робота в направлении пациента, поддерживаемого столом для пациента, чтобы расположить рабочий орган роботизированного хирургического манипулятора рядом с желаемым местом для хирургической операции на теле пациента.
Стол для пациента может быть наклонен относительно уровня земли, для того чтобы достичь с помощью силы тяжести положений внутренних органов пациента, которые могут быть желательны для определенных хирургических процедур.
Документ US 2013/085510 раскрывает аналогичную роботизированную хирургическую систему, в которой роботизированные манипуляторы и стол для пациента прикрепляются к колонне, которая, в свою очередь, установлена на основании. Стол для пациента функционально связан с роботом и с взаимодействующим с ним контроллером. Таким образом, положение пациента может дистанционно контролироваться с использованием робота, а контроллер может иметь информацию о положении и ориентации пациента относительно операционной палаты и относительно различных компонентов робота. Таким образом, такие системы могут поддерживать фиксированную систему координат между пациентом и одним или более рабочих органов хирургического робота, устраняя необходимость повторной калибровки системы вследствие перемещения пациента.
Тем не менее, доступность роботизированных хирургических систем, растущая необходимость улучшения качества окружения в операционной палате все еще существует, если более точно, существует необходимость дальнейшего улучшения и развития роботизированных хирургических систем, в которых роботизированные манипуляторы и хирургический стол образуют единую интегрированную хирургическую станцию, которая является задачей изобретения, в соответствии с вариантом осуществления настоящего изобретения.
Раскрытие изобретения
Настоящее изобретение относится к роботизированной хирургической станции, содержащей основание, сконфигурированное для прикрепления к основанию сооружения, кольцеобразную структуру, к которой прикрепляются кровать пациента и множество манипуляторов робота в соответствующих первом и втором держателях, а также дистанционный модуль управления, который может использоваться хирургом для выполнения хирургического вмешательства на теле пациента. Кольцеобразная структура может поворачиваться относительно основания вокруг горизонтальной оси поворота в поперечной плоскости, параллельной основанию сооружения и проходящей через центр кольцеобразной структуры.
Роботизированная хирургическая станция также может поворачиваться относительно основания вокруг горизонтальной оси поворота робота в продольной плоскости, параллельной основанию сооружения и перпендикулярной вышеуказанной горизонтальной оси поворота в поперечной плоскости.
Первый и второй держатели кольцеобразной структуры могут иметь телескопическую структуру, таким образом позволяя регулировать взаимное положение кровати пациента и манипуляторов робота.
В соответствии с вариантом осуществления настоящего изобретения, манипуляторы робота могут быть установлены на кольцеобразной структуре в различных местоположениях, чтобы позволить хирургу располагать их на основе требований специфического хирургического вмешательства. Для этой цели второй держатель кольцеобразной структуры содержит кольцевую раму, имеющую пустотелую структуру, в которой располагаются электрические провода и кабели, присоединенные параллельно к определенному количеству гнездовых соединителей, сконфигурированных таким образом, чтобы позволять механическую и электрическую установку соответствующего количества роботизированных манипуляторов.
В отличие от известных роботизированных хирургических систем, которые имеют заданное количество манипуляторов, количество роботизированных манипуляторов, которые могут быть прикреплены к кольцевой раме роботизированной хирургической станции, в соответствии с вариантом осуществления настоящего изобретения, может варьироваться (т.е. она представляет собой «открытую платформу»), в зависимости от специфической необходимости хирургической операции. Следовательно, могут быть достигнуты различные и оптимизированные компоновки хирургической станции, например, для хирургии предстательной железы, легочной хирургии и т.п.
В соответствии с вариантом осуществления настоящего изобретения, первый и второй держатели могут поворачиваться вокруг вертикальной оси поворота робота, перпендикулярной основанию сооружения, а также горизонтальной оси поворота робота в продольной плоскости и горизонтальной оси поворота в поперечной плоскости, для того чтобы кровать пациента и/или манипуляторы могли поворачиваться относительно кольцеобразной структуры, например для того чтобы облегчать приготовление пациента к хирургической операции или установку роботизированных манипуляторов и соответствующих им хирургических инструментов.
В соответствии с дополнительным вариантом осуществления настоящего изобретения, кровать пациента конфигурируется таким образом, чтобы устанавливаться с возможностью удаления на первом держателе. Таким образом, пациент может располагаться на функциональной кровати и подготавливаться для хирургической операции перед доставкой в операционную палату, в которой функциональная кровать присоединяется к хирургической станции. Кроме того, удаление кровати пациента позволяет комфортабельно доставлять пациента назад, в его/ее больничную палату без перемещения пациента на другую кровать.
Дополнительные преимущества и признаки роботизированной хирургической станции, в соответствии с настоящим изобретением, станут более понятными специалистам в данной области техники из последующего подробного и неограничивающего описания его вариантов осуществления со ссылками на прилагаемые чертежи.
Краткое описание чертежей
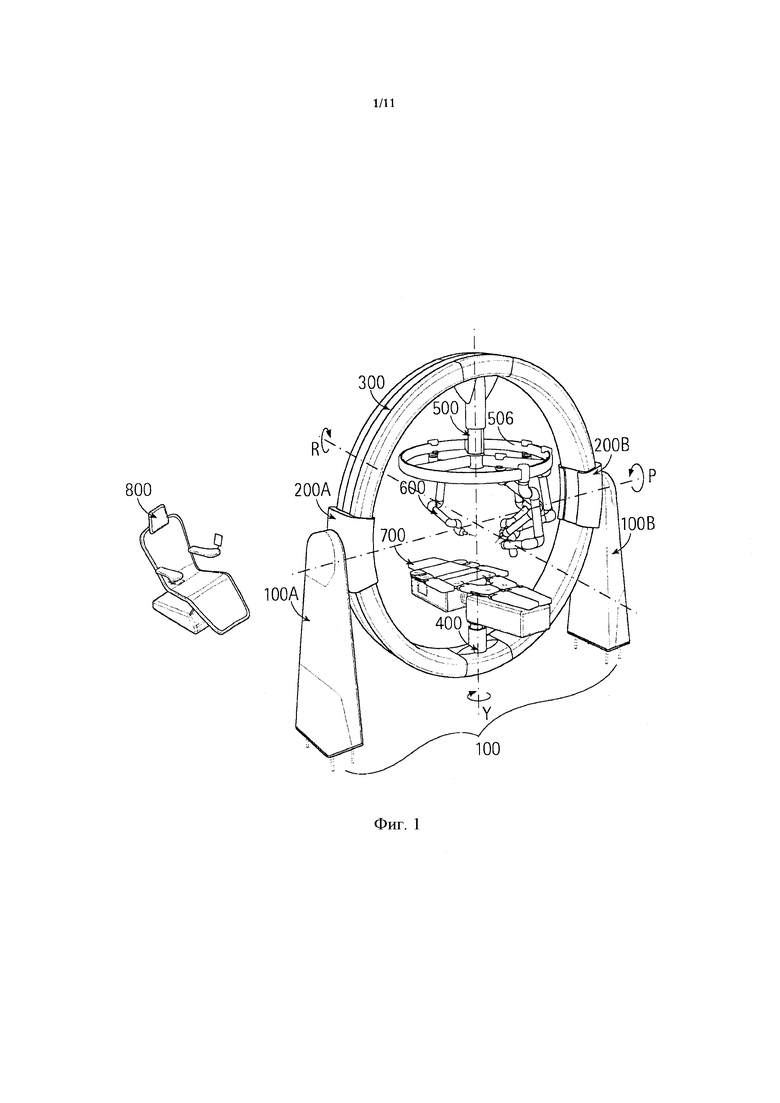
На фиг. 1 показан вид в перспективе варианта осуществления изобретения роботизированной хирургической станции, в соответствии с настоящим изобретением;
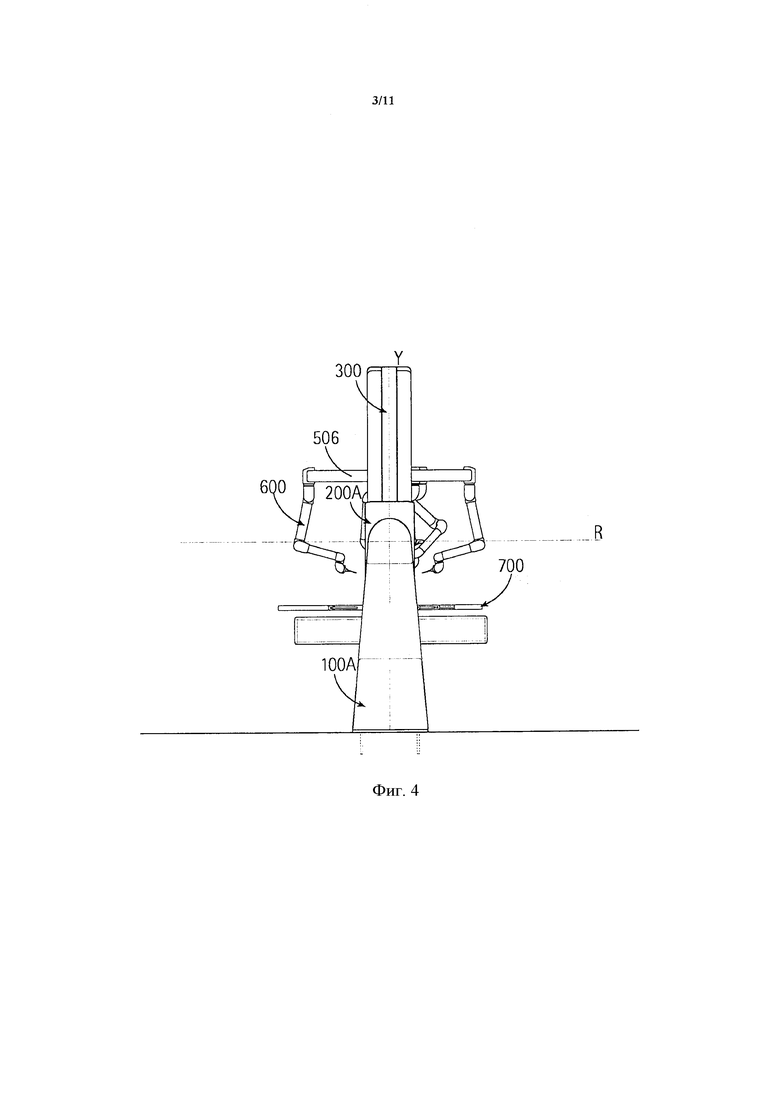
на фиг. 2-4 - соответственно вид сверху, вид спереди и вид сбоку роботизированной хирургической станции, показанной на фиг. 1;
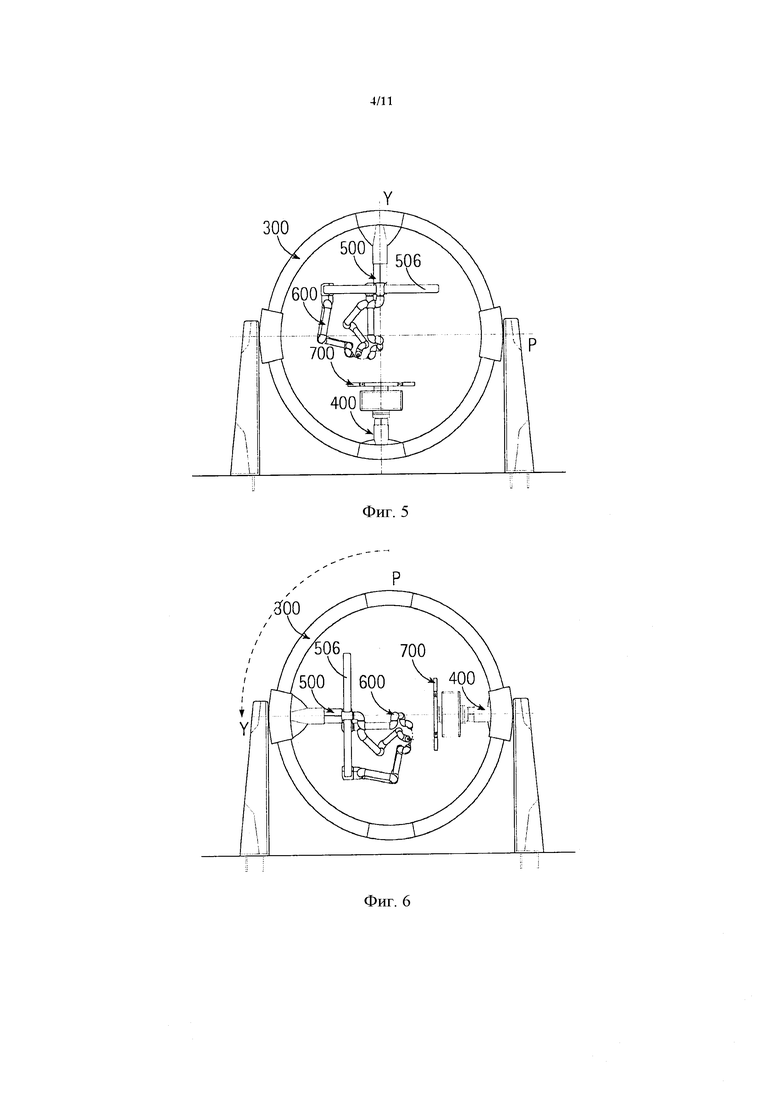
на фиг. 5 - вид спереди роботизированной хирургической станции, в которой кольцеобразная структура находится в базовом положении с кроватью пациента, которая по существу параллельна основанию сооружения;
на фиг. 6 - вид спереди роботизированной хирургической станции, в которой кольцеобразная структура повернута на 90° против часовой стрелки;
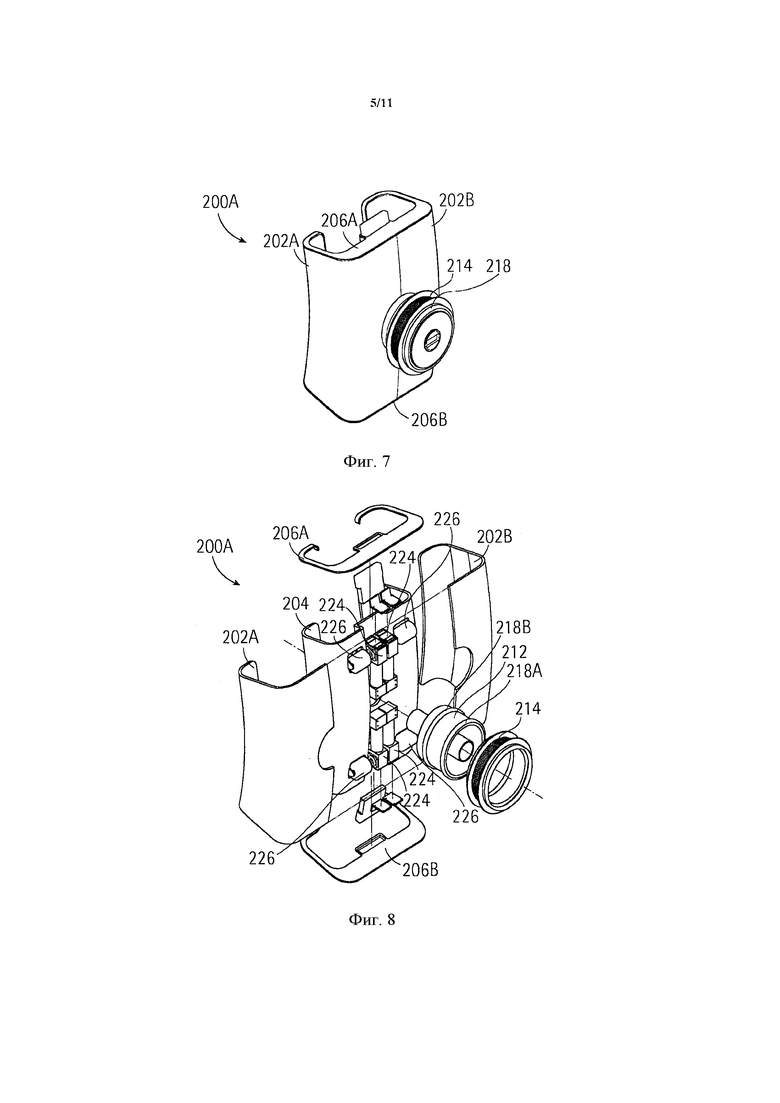
на фиг. 7 и 8 - сборочный узел и перспективное изображение с пространственным разделением деталей дугообразного элемента одной из стоек, соответственно поддерживающих кольцеобразную структуру;
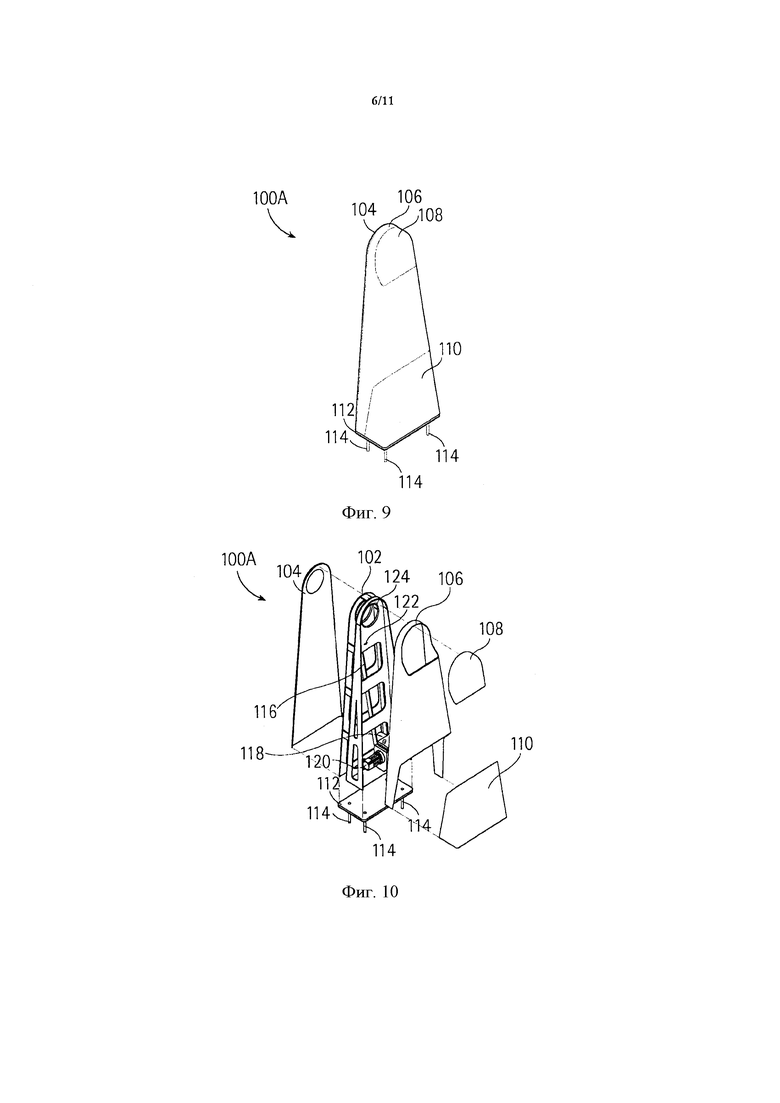
на фиг. 9 и 10 - сборочный узел и перспективное изображение с пространственным разделением деталей одной из стоек, соответственно поддерживающих кольцеобразную структуру;
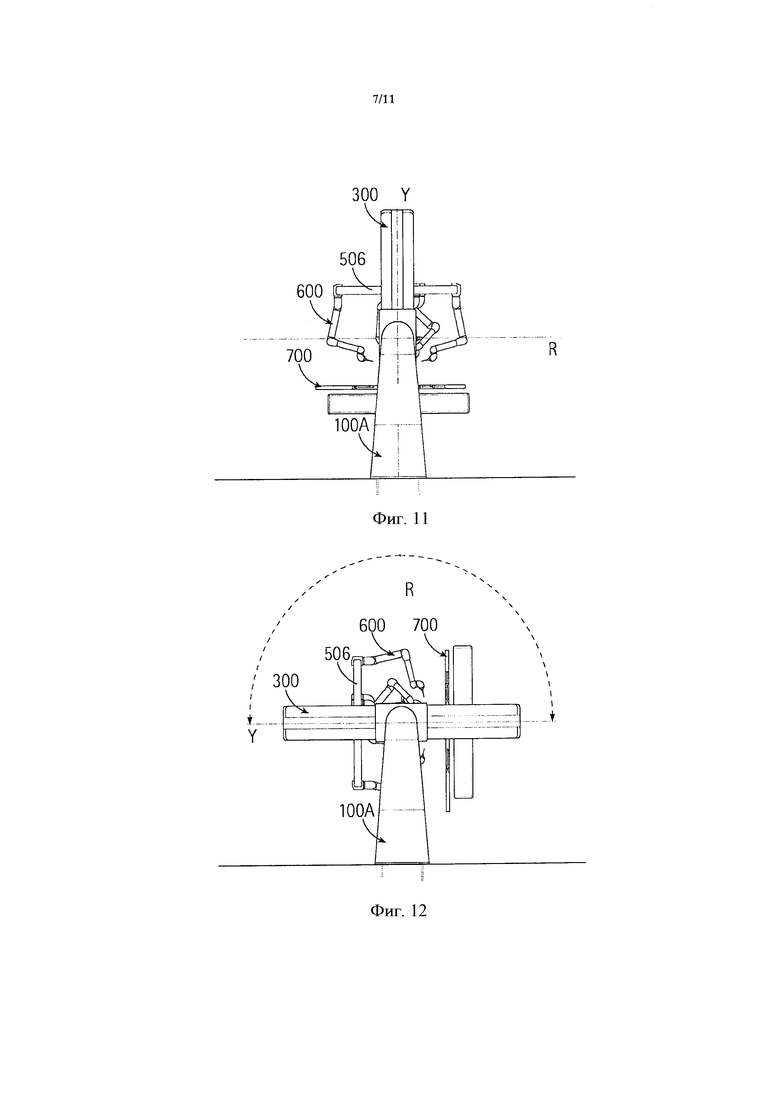
на фиг. 11 и 12 - схема вращения по часовой стрелке или против часовой стрелки кольцеобразной структуры вокруг горизонтальной оси поворота робота в продольной плоскости;
на фиг. 13 - подробный вид, показывающий часть кольцеобразной структуры, на которой установлен первый держатель;
на фиг. 14 - подробный вид, показывающий часть кольцеобразной структуры, на которой установлен второй держатель;
на фиг. 15 - вид в разрезе, показывающий кабель, проложенный через второй держатель, и кольцеобразную структуру, к которой прикрепляется держатель;
на фиг. 16 - вид в разрезе, показывающий кабель, проложенный через один из дугообразных элементов и стойки кольцеобразной структуры;
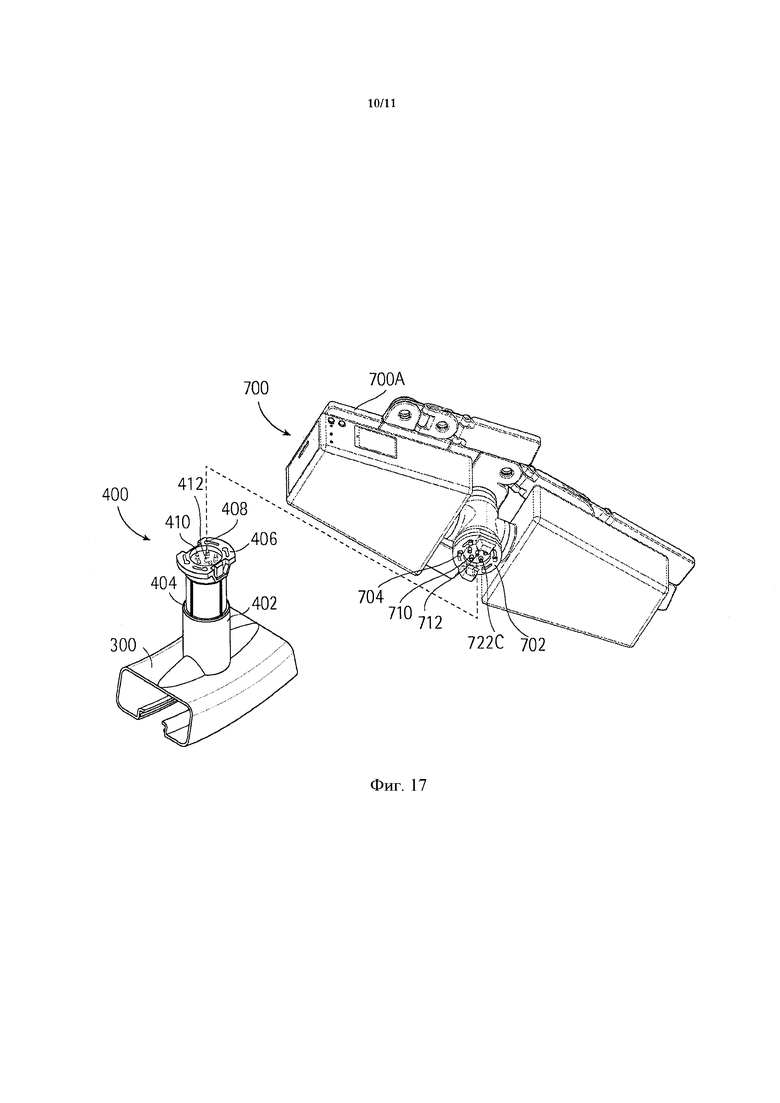
на фиг. 17 - вид в перспективе с пространственным разделением деталей, показывающий кровать пациента, соответствующий держатель и средства для их соединения;
на фиг. 18 и 19 - соответственно виды сверху и видом в разрезе, схематически показывающие вакуумную систему, взаимодействующую с кроватью роботизированной хирургической станции.
Осуществление изобретения
Роботизированная хирургическая станция согласно настоящему изобретению содержит основание 100, выполненное с возможностью прикрепления к основанию сооружения, кольцеобразную структуру 300, к которой прикрепляются и с которой функционально связываются кровать 700 пациента и множество роботизированных манипуляторов 600. Роботизированная хирургическая станция дополнительно содержит дистанционный модуль 800 управления, который может использоваться хирургом для выполнения хирургического вмешательства в тело пациента.
Как показано на фиг. 1-4, основание 100 роботизированной хирургической станции согласно варианту осуществления настоящего изобретения содержит пару вертикальных стоек 100А и 100В, проходящих перпендикулярно к основанию сооружения. Каждая из стоек 100А и 100В содержит дугообразный элемент 200А, 200В, выступающий из нее в поперечном направлении. Стойки 100А и 100В располагаются таким образом, что дугообразные элементы 200А, 200В обращены друг к другу. Дугообразные элементы 200А, 200В являются пустотелыми элементами, в которые кольцеобразная структура 300 устанавливается с возможностью скользящего перемещения. Кольцеобразная структура 300 обеспечивается первым держателем 400, сконфигурированным таким образом, чтобы поддерживать кровать 700 пациента, и вторым держателем 500, поддерживающим раму 506, сконфигурированную для поддержания сборки из множества роботизированных манипуляторов 600, которые могут управляться хирургом с дистанционного модуля 800 управления. Первый и второй держатели 400, 500 располагаются противоположно друг другу вдоль диаметра кольцеобразной структуры 300.
На фиг. 1-4 первый и второй держатели 400, 500 показаны выровненными в вертикальном направлении, т.е. их оси по существу перпендикулярны основанию сооружения. Это является базовой конфигурацией роботизированной хирургической станции, в которой кровать 700 пациента по существу параллельна основанию сооружения.
В соответствии с вариантом осуществления настоящего изобретения, кольцеобразная структура 300 может поворачиваться относительно основания 100 вокруг горизонтальной оси R поворота робота в поперечной плоскости параллельно основанию сооружения, при этом ось проходит через центр кольцеобразной структуры 300. Как показано на фиг. 5 и 6, кольцеобразная структура 300 может быть, например, повернута на 90° по часовой стрелке или против часовой стрелки вокруг горизонтальной оси R поворота робота в поперечной плоскости, для того чтобы перемещать кровать 700 пациента из первого положения, по существу параллельного основанию сооружения, соответствующего традиционному нерабочему положению хирургического стола, во второе положение, по существу перпендикулярное основанию сооружения, которое очень часто используется в лапароскопической хирургии, чтобы использовать силу тяжести в качестве средства для перемещения внутренних органов пациента и создавать место для более эффективной манипуляции хирургическими инструментами.
Благодаря вышеописанной конфигурации роботизированной хирургической станции, вращение кольцеобразной поддерживающей структуры 300 одновременно определяет вращение как кровати 700 пациента, собранной на первом держателе 400, так и роботизированных манипуляторов 600, прикрепленных ко второму держателю 500. Другими словами, роботизированные манипуляторы 600 могут перемещаться в механической синхронизации с кроватью 700 пациента, поскольку они устанавливаются на ту же самую кольцеобразную поддерживающую структуру 300. В отличие от известных роботизированных хирургических станций со встроенным хирургическим столом, в которых роботизированные манипуляторы конфигурируются для автоматического следования за кроватью пациента, когда она перемещается относительно основания сооружения, в роботизированной хирургической станции согласно варианту осуществления настоящего изобретения кровать пациента и роботизированные манипуляторы могут перемещаться одновременно, таким образом поддерживая их первоначальную установку взаимного позиционирования на весь период хирургического вмешательства.
Преимущество этой конфигурации по сравнению с существующими роботизированными хирургическими системами состоит в том, что синхронизация между кроватью и роботизированными манипуляторами по существу определяется конструкцией всей хирургической системы. Нет необходимости для существования беспроводных соединений, которые могут вызвать неправильное функционирование компонентов, т.е. кровати и роботизированных манипуляторов, которые должны перемещаться, а также могут привести к прерываниям/нарушениям хирургических процедур, что может быть опасным для пациентов. В соответствии с вариантом осуществления настоящего изобретения, вращение кольцеобразной структуры 300 может быть получено за счет роликов с механическим приводом, размещаемых в дугообразных элементах 200А, 200В.
На фиг. 7 и 8 показаны, соответственно, сборочный узел и перспективное изображение с пространственным разделением деталей дугообразного элемента 200А. Ролики обозначаются цифровыми ссылками 226, в то время как соответствующие редукторные электродвигатели обозначаются цифровой ссылкой 224. В проиллюстрированном варианте осуществления изобретения показано четыре ролика 226 и четыре соответствующих редукторных электродвигателя 224, но также может использоваться другое количество роликов и электродвигателей.
Как показано на фиг. 7 и 8, в соответствии с вариантом осуществления настоящего изобретения, дугообразный элемент 200А содержит внешний кожух, имеющий пару половин 202А, 202В оболочек. Внешний кожух также содержит верхнюю и нижнюю крышки 206А, 206 В.
Дугообразный элемент 200А дополнительно содержит внутренний кожух 204, расположенный внутри внешнего кожуха. Ролики 226 и соответствующие им редукторные электродвигатели 224 установлены на внутреннем кожухе 204. Внешний кожух содержит круглое отверстие, сформированное в половинах 202А, 202В оболочек, в которое устанавливаются шкив 214, соответствующий ротор 212 и подшипники 218А, 218В. Эти компоненты позволяют прикреплять с возможностью вращения дугообразный элемент 200А к стойке 100А, которая будет описываться в дальнейшем. Дугообразный элемент 200В содержит те же самые компоненты, что и дугообразный элемент 200А.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, кольцеобразная структура 300 также может вращаться относительно горизонтальной оси Ρ поворота робота в продольной плоскости, которая параллельна основанию сооружения и перпендикулярна горизонтальной оси R поворота робота в поперечной плоскости. Для этой цели дугообразные элементы 200А, 200В прикрепляются с возможностью вращения к стойкам 100А и 100В основания 100 и функционально связываются с соответствующими электродвигателями, помещенными в стойках 100А, 100В, например, через зубчатые ремни.
На фиг. 9 и 10 соответственно показаны сборочный узел и перспективное изображение стойки 100А с пространственным разделением деталей. Стойка 100А содержит опорную конструкцию 102 и защитный кожух, например выполненный из передней и задней защитных оболочек 104 и 106. Кожух также содержит базовый элемент 112, расположенный в нижней части стойки 100А и сконфигурированный таким образом, чтобы позволять его прикрепление к основанию сооружения, например, с помощью винтов 114. Кожух также может содержать контрольные защитные оболочки 108 и 110, например, присоединенные с возможностью удаления к задней защитной оболочке 106. Редукторный электродвигатель 120 располагается в основании опорной конструкции 102. Электродвигатель содержит шкив 118, приводящий в движение зубчатый ремень 116, сконфигурированный таким образом, чтобы присоединяться к шкиву 214 дугообразного элемента 200А, показанного на фиг. 7 и 8. Опорная конструкция 102 содержит монтажное средство 124, сформированное в верхней части и подходящее для вмещения шкива 214 дугообразного элемента 200А. Стойка 100В содержит те же самые компоненты, что и стойка 100А.
На фиг. 11 и 12 схематически показано, каким образом может вращаться кольцеобразная структура 300, например, на 90° по часовой стрелке или против часовой стрелки вокруг горизонтальной оси поворота робота в продольной плоскости.
Благодаря этой конфигурации роботизированной хирургической станции, в соответствии с вариантом осуществления настоящего изобретения, кровать 700 пациента и роботизированные манипуляторы 600 могут одновременно вращаться вокруг двух горизонтальных осей, а именно: вокруг горизонтальной оси R поворота в поперечной плоскости и вокруг горизонтальной оси Ρ поворота в продольной плоскости, в то же время поддерживая их первоначальную установку взаимного позиционирования. Это позволяет хирургу перемещать пациента относительно основания сооружения, в соответствии с двумя вращательными степенями свободы.
В соответствии с вариантом осуществления настоящего изобретения, первый и второй держатели 400, 500, предпочтительно, могут иметь телескопическую структуру, чтобы позволять регулирование относительного расстояния между кроватью 700 пациента и роботизированными манипуляторами 600, в частности, во время фазы первоначальной установки.
На фиг. 13 подробно показана часть кольцеобразной структуры 300, на которой установлен первый держатель 400. Для упрощения кровать пациента не показана на фиг. 13.
Первый держатель 400 имеет телескопическую структуру, содержащую внешний цилиндр 402 и внутренний цилиндр 404, установленный с возможностью скольжения во внешнем цилиндре 402. Свободный конец внутреннего цилиндра 404 содержит фланец 406, на который устанавливается кровать 700 пациента.
Описанный выше первый держатель 400 может конфигурироваться как гидравлический линейный приводной механизм или электромеханический линейный приводной механизм, причем последний содержит, например, редукторный электродвигатель, входящий в зацепление с резьбовым профилем, сформированным внутри внешнего цилиндра 402.
На фиг. 14 подробно показана часть кольцеобразной структуры 300, на которой установлен второй держатель 500. Для упрощения на фиг. 14 показан только один роботизированный манипулятор 600.
Второй держатель 500 имеет телескопическую структуру, содержащую внешний цилиндр 502 и внутренний цилиндр 504, установленный с возможностью скольжения во внешнем цилиндре 502. Свободный конец внутреннего цилиндра 504 содержит кольцевую раму 506, позволяющую устанавливать на ней роботизированные манипуляторы 600. Кольцевая рама 506 прикрепляется к внутреннему цилиндру с помощью радиальных элементов 508.
Аналогично первому телескопическому держателю 400, вышеописанный второй телескопический держатель 500 также может конфигурироваться как гидравлический линейный приводной механизм или электромеханический линейный приводной механизм, причем последний содержит, например, редукторный электродвигатель, входящий в зацепление с резьбовым профилем, сформированным внутри внешнего цилиндра 502.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, кольцевая рама 506 конфигурируется таким образом, чтобы обеспечить установку роботизированных манипуляторов 600 в различных рабочих положениях. Эта конфигурация является предпочтительной, поскольку она позволяет собирать роботизированные манипуляторы 600 на основе нужд хирурга в рамках специфического хирургического вмешательства. Для этой цели кольцевая рама 506 конфигурируется как пустотелая структура, в которой электрические провода и кабели 506А располагаются вдоль внутренней периферии и соединяются параллельно, в соответствии с определенным количеством гнездовых соединителей 506В, сконфигурированных таким образом, чтобы обеспечивать электрическое подсоединение роботизированных манипуляторов 600. Как можно увидеть на фигурах, манипуляторы 600 могут, например, устанавливаться с помощью защелкивающегося соединения на кольцевой раме 506 посредством соответствующих зажимов 600А и электрических штекеров 600В манипуляторов 600, которые могут быть установлены в соответствующих контактных гнездах 506В. Следовательно, механическое и электрическое соединение манипуляторов 600 может быть получено простым, быстрым и эффективным способом.
Как показано на фиг. 15, электрические провода достигают кольцевой рамы через первый канал 310, сформированный в кольцеобразной структуре 300, и через второй канал 510, сформированный соосно со вторым держателем 500. Электрические провода и кабели 506А, предпочтительно, могут направляться через гибкий кабельный канал 512, который помещается в первом и втором каналах 310, 510.
Как показано на фиг. 16, гибкий кабельный канал 512 проходит через канал 310 кольцеобразной структуры 300 и выходит из него через один из дугообразных элементов 200А, 200В, например, через дугообразный элемент 200А, например, соосно шкиву 214, и дополнительно направляется вдоль соответствующей стойки 100А, например, вдоль защитной оболочки 106 заднего кожуха.
В соответствии с вариантом осуществления настоящего изобретения как первый, так и второй держатели 400, 500 имеют возможность вращаться вокруг вертикальной оси Y поворота робота, перпендикулярной основанию сооружения, а также горизонтальной оси R поворота робота в поперечной плоскости и горизонтальной оси поворота робота в продольной плоскости. Благодаря этому признаку, хирургическая станция может иметь три вращательных степени свободы, т.е. вращение вокруг горизонтальной оси поворота робота в поперечной плоскости, горизонтальной оси поворота робота в продольной плоскости и вертикальной оси поворота робота.
Для этой цели редукторный электродвигатель может располагаться, например, внутри внутреннего цилиндра 404, 504 каждого держателя 400, 500, соответствующая рама может быть сформирована на внутренней периферии фланца 406 и элемента 514 для прикрепления кольцевой рамы 506.
Этот признак, в соответствии с вариантом осуществления настоящего изобретения, позволяет поворачивать кровать 700 пациента и роботизированные манипуляторы 600 относительно кольцеобразной структуры 300 параллельно основанию сооружения, в зависимости от специфических нужд хирургического персонала. Следовательно, может быть достигнуто оптимальное позиционирование кровати 700 пациента и/или роботизированных манипуляторов 600.
Поворачивание кровати 700 пациента и роботизированных манипуляторов 600 вокруг вертикальной оси Y поворота робота может быть одновременным, аналогично другим перемещениям хирургической станции, таким образом позволяя поддерживать установленное взаимное позиционирование. Поворачивание кровати 700 пациента и роботизированных манипуляторов 600 вокруг вертикальной оси Y поворота робота также может быть неодновременным, например, для того чтобы позволить подготовить пациента для хирургической операции или переместить его/ее от хирургической станции к больничной кровати для транспортировки в больничную палату.
В соответствии с вариантом осуществления настоящего изобретения, кровать 700 пациента, предпочтительно, может быть сконфигурирована таким образом, чтобы устанавливаться с возможностью удаления на первом держателе 400.
Для этой цели кровать 700 пациента содержит фланец 702, расположенный на поверхности, противоположной поверхности 700А, предназначенной для помещения на нее пациента, и обеспечиваемый средствами для стыковки, сконфигурированными таким образом, чтобы устанавливать с возможностью удаления соответствующие стыковочные средства, обеспечиваемые на фланце 406 и сформированные на свободном конце первого держателя 400.
Как показано на фиг. 17, стыковочные средства могут быть, например, столбиками 704 в форме гриба, обеспечиваемыми на фланце 702 кровати пациента, входящими в зацепление с соответствующими щелевыми отверстиями 406 первого держателя 400.
Предпочтительно, кровать 700 пациента может быть обеспечена узлом системы жизнеобеспечения, сконфигурированным таким образом, чтобы обеспечивать для пациента ингаляционный анестетик, кислород и подобные средства. Газы могут подаваться к узлу системы жизнеобеспечения через соответствующие питающие трубопроводы, расположенные соосно первому держателю 400 и проходящие вдоль кольцеобразной структуры 300. Трубопроводы могут выходить из кольцеобразной структуры 300 через одну из стоек 100А, 100В. Клапаны 410, позволяющие присоединять питающие трубопроводы к соответствующим трубкам, предназначенным для обслуживания пациента, могут быть обеспечены на фланце 406 первого держателя 400, как показано на фиг. 17. Соответствующие соединители 710 для клапанов обеспечиваются во фланце 702 кровати 700 пациента.
Предпочтительно, кровать 700 пациента также может быть обеспечена инструментами, позволяющими отслеживать основные показатели состояния организма пациента. Электрические провода и кабели могут быть расположены соосно первому держателю 400 и проходить вдоль кольцеобразной структуры 300. Трубопроводы могут выходить из кольцеобразной структуры 300 через одну из стоек 100А, 100В. Электрические разъемы могут быть расположены во фланце 406 рядом с клапанами. Соответствующие электрические разъемы 712 обеспечиваются во фланце 702 кровати 700 пациента.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, кровать пациента выполнена из индивидуально перемещаемых частей, позволяющих расположить пациента в наиболее подходящем положении, требуемом для хирургического вмешательства, которое должно производиться в отношении пациента. Как показано на фиг. 1, кровать 700 пациента, например, содержит индивидуально перемещаемые участки для рук и ног, которые могут поворачиваться относительно рамы кровати вокруг соответствующих горизонтальных осей, параллельных раме кровати, и вертикальных осей, перпендикулярных раме кровати.
Предпочтительно, кровать 700 может обеспечиваться встроенными приводными механизмами, позволяющими выборочно перемещать эти части. Такие приводные механизмы могут быть, например, электромеханическими или гидравлическими приводными механизмами. Электрические проводы и кабели, необходимые для приведения в действие этих приводных механизмов, могут быть расположены соосно первому держателю 400 и проходить вдоль кольцеобразной структуры 300. Электрические провода и кабели могут выходить из кольцеобразной структуры 300 через одну из стоек 100А, 100В.
В соответствии с дополнительным вариантом осуществления настоящего изобретения, хирургическая станция может обеспечиваться вакуумной системой, взаимодействующей с кроватью пациента и позволяющей закреплять пациента на ней, не прибегая к традиционным ремням и креплениям.
Как показано на фиг. 18 и 19, на поверхности 700А кровати 700, предназначенной для размещения пациента, формируется определенное количество отверстий 720, а под вышеуказанными отверстиями 720 располагаются соответствующие полости 722. Полости 722, соответственно, присоединяются к сети всасывающих трубопроводов 724, сформированной в структуре кровати и позволяющей всасывать воздух через отверстия 720.
Всасывающие трубопроводы 724 присоединяются к общему всасывающему отверстию 726, например, расположенному вдоль одной боковой стороны кровати 700. Это отверстие, в свою очередь, может присоединяться к удаленному всасывающему блоку, обеспеченному в операционной палате.
За счет функционирования удаленного всасывающего блока, пациент, лежащий горизонтально на поверхности 700А, может прикрепляться к ней за счет всасывания воздуха, не прибегая к традиционным ремням и креплениям.
Поскольку пациент полностью не покрывает поверхность 700А кровати, а также вследствие того факта, что пациенты имеют различные размеры, вакуумная система, предпочтительно, сконфигурирована таким образом, чтобы активизироваться только на тех участках поверхности 700А, которые в действительности покрываются пациентом. Для этой цели в каждом отверстии 720 обеспечиваются выборочно приводящиеся в действие закрывающие средства. Как схематически показано на разрезе фиг. 19, заглушка 728 устанавливается внутри каждой из полостей 722, расположенных под соответствующими отверстиями 720. Заглушки 728 помещаются в соответствующие полости 722 и подгоняются к соответствующим отверстиям 720 с помощью эластичных средств 730, для того чтобы закрывать их. В проиллюстрированном варианте осуществления изобретения такими средствами являются, например элементы, сформированные в виде куполообразной пружины, выполненной из эластичного полимерного материала. Предпочтительно, пружина может быть сформирована как целая часть в слое, образующем поверхность 700А кровати, в котором формируются отверстия 720, полости 722 и всасывающие трубопроводы 724 вакуумной системы.
Благодаря описанной выше конфигурации, когда на поверхности 700А кровати 700 нет пациента, все отверстия 720 закрываются. Когда пациент располагается на поверхности 700А кровати, на множество заглушек 728 оказывается нажимающее воздействие веса пациента, таким образом соответствующее количество отверстий 720, относящихся к ним полостей 722 и всасывающих трубопроводов 724 открываются и через них может засасываться воздух. Следовательно, активная часть вакуумной системы конфигурируется непосредственно и точно, при этом она определяется пациентом, лежащим на поверхности 700А.
В проиллюстрированном варианте осуществления изобретения поверхность 700А кровати имеет многослойную структуру, а всасывающая структура формируется в ее верхнем слое 758. Поверхность 700А кровати также содержит защитный слой 756, поддерживающий верхний слой 758.
Понятно, что приведенное выше подробное описание является только иллюстративным, и не должно рассматриваться как ограничение объема настоящего изобретения, которое определяется исключительно прилагаемыми пунктами формулы изобретения и их эквивалентами. Различные изменения и модификации раскрываемых вариантов осуществления изобретения будут очевидны для специалистов в данной области техники.




Изобретение относится к медицине. Роботизированная хирургическая станция содержит основание, выполненное с возможностью прикрепления к основанию сооружения, кольцеобразную структуру и дистанционный модуль управления. К кольцеобразной структуре прикреплены кровать пациента и множество манипуляторов робота в соответствующих первом и втором держателях. Дистанционный модуль управления предназначен для использования хирургом для выполнения хирургического вмешательства в тело пациента. Кольцеобразная структура имеет возможность поворота относительно основания вокруг горизонтальной оси поворота в поперечной плоскости, которая является параллельной основанию сооружения и проходит через центр кольцеобразной структуры. Роботизированные манипуляторы являются подвижными в механической синхронизации с кроватью пациента. Указанные первый и второй держатели кольцеобразной структуры расположены противоположно друг другу вдоль ее диаметра. Изобретение обеспечивает поддержание первоначальной установки взаимного позиционирования роботизированных манипуляторов и кровати пациента на протяжении всего периода хирургического вмешательства, а также обеспечивает снижение опасности для пациентов, связанной с возможными прерываниями или нарушениями хирургических процедур за счет отсутствия необходимости в использовании беспроводных соединений. 11 з.п. ф-лы, 19 ил.
1. Роботизированная хирургическая станция, содержащая:
- основание, выполненное с возможностью прикрепления к основанию сооружения,
- кольцеобразную структуру, к которой прикреплены кровать пациента и множество манипуляторов робота в соответствующих первом и втором держателях, и
- дистанционный модуль управления, предназначенный для использования хирургом для выполнения хирургического вмешательства в тело пациента;
при этом кольцеобразная структура имеет возможность поворота относительно основания вокруг горизонтальной оси поворота в поперечной плоскости, которая является параллельной основанию сооружения и проходит через центр кольцеобразной структуры, таким образом роботизированные манипуляторы являются подвижными в механической синхронизации с кроватью пациента, при этом указанные первый и второй держатели кольцеобразной структуры расположены противоположно друг другу вдоль ее диаметра.
2. Роботизированная хирургическая станция по п. 1, в которой основание содержит пару вертикальных стоек, проходящих перпендикулярно к основанию сооружения, причем каждая из стоек содержит дугообразный элемент, выступающий из нее в поперечном направлении, при этом стойки расположены таким образом, что дугообразные элементы обращены друг к другу, причем дугообразные элементы являются пустотелыми элементами, в которые установлена кольцеобразная структура.
3. Роботизированная хирургическая станция по п. 2, которая дополнительно содержит механизированные ролики, размещенные в дугообразных элементах, причем указанные механизированные ролики выполнены с возможностью контакта с кольцеобразной структурой для обеспечения ее вращения.
4. Роботизированная хирургическая станция по п. 1, в которой кольцеобразная структура также имеет возможность поворота относительно основания вокруг горизонтальной оси поворота робота в продольной плоскости, которая параллельна основанию сооружения и перпендикулярна горизонтальной оси поворота робота в поперечной плоскости.
5. Роботизированная хирургическая станция по п. 4, в которой дугообразные элементы прикреплены с возможностью вращения к стойкам и функционально связаны с соответствующими двигателями, размещаемыми в них, посредством зубчатых ремней.
6. Роботизированная хирургическая станция по п. 1, в которой первый и второй держатели имеют телескопическую структуру.
7. Роботизированная хирургическая станция по п. 6, в которой первый и второй держатели являются гидравлическими или электромеханическими линейными приводными механизмами.
8. Роботизированная хирургическая станция по п. 1, в которой рама, связанная со вторым держателем, является пустотелой структурой, в которой электрические провода и кабели расположены вдоль внутренней периферии и присоединены параллельно к определенному количеству гнездовых соединителей, обеспечивающих механическую и электрическую установку соответствующего количества роботизированных манипуляторов.
9. Роботизированная хирургическая станция по п. 1, в которой как первый, так и второй держатели имеют возможность поворота вокруг вертикальной оси поворота робота, которая перпендикулярна основанию сооружения, а также горизонтальной оси поворота робота в продольной плоскости и горизонтальной оси поворота в поперечной плоскости.
10. Роботизированная хирургическая станция по п. 1, в которой кровать пациента выполнена с возможностью съемной установки на первом держателе, при этом кровать пациента содержит фланец, снабженный средствами сцепления, выполненными так, чтобы они согласовывались с соответствующими средствами сцепления, расположенными на фланце, образованном на свободном конце первого держателя.
11. Роботизированная хирургическая станция по п. 1, которая дополнительно содержит вакуумную систему, позволяющую прикреплять пациента к кровати пациента, причем вакуумная система содержит отверстия, сформированные на поверхности кровати, предназначенной для помещения на нее пациента, и соответствующие полости, расположенные под указанными отверстиями, при этом указанные полости соответственно присоединены к сети всасывающих трубопроводов, сформированной в структуре кровати и позволяющей всасывать воздух через эти отверстия.
12. Роботизированная хирургическая станция по п. 11, в которой внутри каждой из полостей, расположенных под соответствующими отверстиями, установлена заглушка, при этом заглушки помещены в соответствующие полости и подогнаны к соответствующим отверстиям с помощью эластичных средств, чтобы закрывать их.
| KR 1020110030038 A, 23.03.2011 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 8162926 B2, 24.04.2012 | |||
| US 20080004523 A1, 03.01.2008 | |||
| US 20130085510 A1, 04.04.2013. | |||

