Изобретение относится к области робототехники и может быть использовано для обеспечения автономного управления машинами сельскохозяйственного или специального назначения в условиях естественной среды.
Известны механические варианты клюквоуборочных машин, предназначенных для работы в условиях искусственных плантаций [1, 2]. Основным недостатком этих машин является то, что они управляются человеком.
Известны также автономные (работающие без участия человека) мобильные роботы (AMP) самого различного [3], в том числе и сельскохозяйственного назначения [4, 5].
Наиболее близким аналогом является AMP "Lukas" [6, 7], содержащий самоходное шасси, рабочий орган, блок автономного энергообеспечения, блок глобального позиционирования. (GPS), выход которого соединен с входом блока управления, а выход блока управления соединен с входом блока исполнительных элементов, блок вертикального зрения, содержащий блок получения и обработки изображений.
Известны различные способы управления AMP [8-10]. В частности, известен способ управления, заключающийся в сочетании планирования глобальной и локальной траекторий движения [9]. Планирование глобальной траектории осуществляется по имеющейся в распоряжении робота карты среды, а локальная траектория определяется по сенсорной информации об окружающей среде. На основе сочетания глобальной и локальной траектории с помощью нечеткой логики происходит формирование гибридной траектории, по которой и движется робот. Недостатком способа является необходимость изначального наличия карты для построения глобальной траектории движения, что затруднительно в условиях естественной среды.
Известен также способ управления, заключающийся в том, что робот изначально проходит всю плантацию и запоминает расположение и параметры биологической массы растительного происхождения (например, фруктов и овощей), а затем вырабатывает план для осуществления процесса сбора [10]. Недостатком способа является необходимость проходить всю плантацию для составления карты.
В прототипе используется способ, заключающийся в том, что с помощью блока глобального позиционирования осуществляют глобальную навигацию робота в заданных пределах местности, а с помощью блока получения и обработки изображений получают изображения земной поверхности, анализируют полученные изображения и по информации о биологической массе растительного происхождения (БМРП) требуемого вида блок управления формирует и подает соответствующие команды в блок исполнительных элементов для осуществления процесса сбора.
Недостаток указанного аналога заключается в том, что он предназначен для работы только в условиях сельскохозяйственных угодий с заранее известным распределением биологической массы растительного происхождения и проявляющийся в том, что:
1) используемая навигация робота не позволяет осуществлять формирование оптимальной, с точки зрения экономической эффективности, траектории движения в условиях неизвестной местности;
2) техническое зрение не позволяет идентифицировать объекты с точки зрения препятствия/не препятствия.
Указанные свойства аналога связаны с отсутствием необходимости в решении этих задач в условиях искусственных плантаций.
Целью изобретения является разработка автономного мобильного робота, предназначенного для сбора дикоросов, и способа управления им.
Указанная цель достигается тем, что в автономный мобильный робот, содержащий самоходное шасси, рабочий орган, блок автономного энергообеспечения, блок глобального позиционирования (GPS), выход которого соединен с входом блока управления, а выход блока управления соединен с входом блока исполнительных элементов, блок вертикального зрения, содержащий блок получения и обработки изображений БОИ №1, в состав блока вертикального зрения дополнительно введен блок сбора информации о распределении дикоросов (БСИРД), первый выход которого соединен со вторым входом блока управления, первый вход БСИРД соединен с выходом БОИ №1, второй вход соединен со вторым выходом блока глобального позиционирования. При этом в состав робота дополнительно введен блок прогнозирования траектории движения, первый вход которого соединен со вторым выходом БСИРД, а первый и второй выходы блока прогнозирования траектории движения соединены с входами соответственно задатчика формы траектории движения и задатчика параметров траектории движения, выходы которых соединены соответственно с третьим и четвертым входами блока управления, третий выход блока прогнозирования траектории движения соединен с первым входом блока определения экономической эффективности (БОЭЭ), первый выход которого соединен со вторым входом блока прогнозирования траектории движения, второй выход соединен с входом задатчика параметров локальной области, выход которого соединен с пятым входом блока управления.
Кроме этого, в состав блока вертикального зрения введен дополнительный блок получения и обработки изображений (БОИ №2), выход которого соединен с третьим входом БСИРД, а в состав робота дополнительно введен блок контроля эффективности сбора, вход которого соединен с третьим выходом БСИРД, а выход соединен с шестым входом блока управления.
При этом в состав блока вертикального зрения дополнительно введен блок синхронизации, вход которого соединен со вторым выходом блока управления, а первый и второй выходы соединены соответственно с входами БОИ №1 и БОИ №2.
Кроме того, в состав робота дополнительно введен блок горизонтального зрения, состоящий из блока инфракрасных сенсоров (БИС), блока определения структуры объекта (БОСО), блока получения и обработки изображений (БОИ №3) и блока распознавания препятствий, первый, второй и третий входы которого соединены соответственно с выходом БИС, выходом БОСО и выходом БОИ №3, а первый выход блока распознавания препятствий соединен с седьмым входом блока управления. Также в состав робота дополнительно введен блок тактильных сенсоров, выход которого соединен с восьмым входом блока управления и с первым входом блока анализа ошибок распознавания (БАОР), второй вход которого соединен со вторым выходом блока распознавания препятствий, а выход БАОР соединен с входом блока обучения, выход которого соединен с четвертым входом блока распознавания препятствий.
При этом в состав робота дополнительно введены блок технической диагностики, первый выход которого соединен с пятым входом блока распознавания препятствий, второй выход соединен с девятым входом блока управления, и блок переключения режимов распознавания, вход которого соединен с третьим выходом БОЭЭ, первый выход соединен с шестым входом блока распознавания препятствий. Кроме того, в блок вертикального зрения дополнительно введен блок коммутации, первый вход которого соединен со вторым выходом блока переключения режимов распознавания, а вместо соединения выхода БОИ №1 с первым входом БСИРД выход БОИ №1 соединен со вторым входом блока коммутации, первый выход которого соединен с первым входом БСИРД, второй выход соединен с седьмым входом блока распознавания препятствий, третий выход которого соединен со вторым входом БОЭЭ.
Кроме этого, с помощью блока глобального позиционирования осуществляют глобальную навигацию робота в заданных пределах местности, а с помощью блока получения и обработки изображений получают изображения земной поверхности, анализируют полученные изображения и по информации о биологической массе растительного происхождения (БМРП) требуемого вида блок управления формирует и подает соответствующие команды в блок исполнительных элементов для осуществления процесса сбора, отличающийся тем, что с помощью блока глобального позиционирования и блока вертикального зрения осуществляют картографирование неизвестной местности, с помощью блока прогнозирования траектории движения и блока определения экономической эффективности составляют прогноз о поверхностном распределении БМРП, определяют экономически наиболее выгодные локальные области с БМРП, находят оптимальный с точки зрения экономической эффективности маршрут движения робота и с помощью задатчика формы траектории движения и задатчика параметров траектории движения устанавливают соответственно форму и параметры траектории движения робота. По найденным параметрам траектории с учетом текущей информации о местонахождении робота и о поверхностном распределении БМРП непосредственно впереди по курсу движения робота с помощью блока управления определяют параметры движения робота, причем непосредственно управление движением автономного робота осуществляют с помощью блока управления как с учетом спланированного направления движения, так и с учетом информации о препятствиях на пути робота, полученной с помощью блока горизонтального зрения и блока тактильных сенсоров.
Кроме того, движение робота внутри спрогнозированной локальной области местности осуществляется с переменными параметрами траектории движения, адаптивно изменяющимися в зависимости от границы локальной области, определяемой по факту, с помощью блока вертикального зрения.
Кроме этого, с помощью БОЭЭ определяют и сравнивают экономическую эффективность движения робота с преодолением препятствий и с обходом препятствий (без преодоления) и с помощью блока переключения режимов распознавания задают режим движения робота (обход препятствий или преодоление препятствий). При обнаружении препятствия в режиме преодоления препятствий с помощью блока коммутации осуществляют переключение канала передачи информации от БОИ №1 в блок распознавания препятствий, затем по трехмерным геометрическим параметрам объекта, информации о его структуре и температуре с помощью блока распознавания препятствий классифицируют объект по признаку преодолимое препятствие/непреодолимое препятствие и в зависимости от результата классификации с помощью блока управления осуществляют либо обход препятствия, либо его преодоление. При обходе препятствия либо после его преодоления осуществляют обратное переключение канала передачи информации от БОИ №1 в БСИРД.
Кроме того, с помощью блока анализа ошибок распознавания накапливают информацию о параметрах неправильно распознанных объектов, определяют количество актов неправильного распознавания и при превышении процента ошибок заранее определенного значения с помощью блока обучения осуществляют дообучение блока распознавания препятствий с учетом накопленной информации.
Названия каждого из блоков технического зрения ("блок горизонтального зрения" 19 и "блок вертикального зрения" 7) проистекают из их основного функционального назначения: для распознавания препятствий необходимо смотреть преимущественно горизонтально, а для сбора информации о распределении дикоросов необходимо смотреть преимущественно вертикально. Эти названия не привязаны жестко к понятиям горизонтальности и вертикальности и в этом смысле являются условными.
Известно применение блока глобального позиционирования (GPS) для навигации автономных мобильных роботов [11]. Однако применение собственно GPS для формирования траектории движения эффективно только в урбанизированных и искусственных условиях. Кроме этого, выбор траектории движения для данного робота связан не с конкретными координатами, а с экономически наиболее выгодными участками ареала распространения дикоросов, местоположение которых априори не известно. В данном устройстве GPS используется для осуществления картографирования распределения БМРП требуемого вида с целью составления прогноза этого распределения в не пройденных участках местности, определения экономически наиболее выгодных локальных областей с БМРП и нахождения оптимального, с точки зрения экономической эффективности, маршрута движения робота.
Известно применение горизонтального зрения для решения задачи обнаружения препятствий [12]. При этом любой объект на пути робота рассматривается как препятствие. Такая ситуация особенно характерна для комнатных роботов. Для роботов, предназначенных для сбора дикоросов, функционирующих в условиях естественной среды, задача распознавания препятствий является актуальной с технико-экономической точки зрения. Решение этой задачи позволяет определить возможность преодоления этих объектов, что приводит к более рациональному планированию траектории движения и сокращению временных затрат на достижение роботом экономически наиболее выгодных локальных областей с БМРП требуемого вида. Для этого в состав блока горизонтального зрения дополнительно введен блок определения структуры объекта, который по величине диэлектрической проницаемости приближенно определяет материал, из которого состоит объект. Кроме того, в состав блока вертикального зрения введен блок коммутации, с помощью которого осуществляют переключение канала передачи информации от БОИ №1 в блок распознавания препятствий для определения геометрических параметров объекта в вертикальной плоскости. Таким образом, трехмерные геометрические параметры объекта, информация о его структуре и температуре, а также параметры, характеризующие внутреннее состояние робота, получаемые с выхода блока технической диагностики, служат для определения: является ли объект преодолимым препятствием или нет. Особенностью данного устройства является еще и то, что рассмотрение препятствий с точки зрения их преодолимости производится в случае экономической целесообразности их преодоления, определяемой с помощью БОЭЭ.
Известно применение блока технической диагностики для получения информации о техническом состоянии узлов и внутренних параметрах устройства [13]. В работах [14, 15] авторами было введено понятие "условного препятствия", т.е. такого объекта, по отношению к которому невозможно произвести классификацию по признаку препятствие/не препятствие для каждого конкретного робота, основываясь только на параметрах этого объекта. При этом было показано, что для определения преодолимости препятствия необходимо учитывать текущие внутренние параметры AMP. В данном устройстве блок технической диагностики используется не только с целью диагностики узлов робота, но и для осуществления процесса классификации объектов по признаку преодолимое препятствие/непреодолимое препятствие.
Известно применение блока тактильных сенсоров для избежания столкновения робота с препятствием [16]. Известно также применение этого блока для обучения системы управления движением мобильного робота избежанию столкновений [17]. При этом обучение ведется "с нуля" (при необученной системе) и происходит каждый раз при столкновении робота с препятствием. В данном устройстве осуществляется дообучение уже обученного блока распознавания препятствий только в том случае, если процент неправильного распознавания превышает некоторое критическое значение. Таким образом, дообучение происходит только в случае необходимости, что, в свою очередь, позволяет избежать больших временных затрат на обучение.
На чертеже показана схема автономного мобильного робота для сбора дикоросов, содержащего самоходное шасси 1, рабочий орган 2, блок автономного энергообеспечения 3, блок глобального позиционирования 4, связанный с блоком управления 5, который соединен с блоком исполнительных элементов 6. С блоком 4 глобального позиционирования и блоком 5 управления связан блок вертикального зрения 7, содержащий блок сбора информации о распределении дикоросов 8, блок коммутации 9, а также блоки 10 и 11 получения и обработки изображений, соединенные с блоком синхронизации 12. При этом блок 11 получения и обработки изображений связан с БСИРД 8 непосредственно, а блок получения и обработки изображений 10 - через блок коммутации 9. Блок 8 связан с блоком контроля эффективности сбора 13, который соединен с блоком управления 5. Кроме того, БСИРД 8 соединен с блоком прогнозирования траектории движения 14, связанным с блоком определения экономической эффективности 15. Блок 14 прогнозирования траектории движения соединен с задатчиком формы 16 и параметров 17 траектории движения, а БОЭЭ 15 соединен с задатчиком параметров локальной области 18. Все задатчики (16, 17 и 18) соединены с блоком управления 5. В состав устройства входит также блок горизонтального зрения 19, состоящий из БИС 20, БОСО 21, БОИ 22 и связанного с ними блока распознавания препятствий 23. Блок распознавания препятствий 23 соединен также с БОЭЭ 15, блоком технической диагностики 24. блоком коммутации 9 и блоком переключения режимов распознавания 25. Блок 24 технической диагностики связан с блоком 5 управления, а блок 25 переключения режимов распознавания связан с блоком коммутации 9 и БОЭЭ 15. Кроме того, в состав робота входит блок тактильных сенсоров 26, связанный с блоком 5 управления и блоком анализа ошибок распознавания 27. Блок 27 анализа ошибок распознавания связан с блоком обучения 28, при этом блоки 27 и 28 связаны с блоком распознавания препятствий 22.
Устройство работает следующим образом.
В исходном состоянии AMP неподвижен, находится внутри области произрастания дикоросов, заранее заданной с помощью блока 4 GPS, условно названной глобальной областью, и сориентирован в предполагаемом направлении движения. Блок автономного энергообеспечения 3 питает все электронные блоки, датчики и исполнительные элементы, все датчики включены, сигналы с выходов блока 5 управления отсутствуют, исполнительные механизмы блока 6 и рабочий орган 2 находятся в состоянии покоя. В связи с тем, что AMP неподвижен, сигналы синхронизации с выхода блока 12 на вход блоков получения и обработки изображений 10 и 11 не поступают, и блоки 10 и 11 не передают информацию о поверхностной плотности распределения дикоросов в БСИРД 8. Так как БСИРД 8 не имеет априорной информации о поверхностном распределении дикоросов, передачи информации в блок 14 прогнозирования траектории движения не происходит. Следовательно, прогнозирования поверхностного распределения БМРП требуемого вида и определения оптимальных с точки зрения экономической эффективности параметров траектории движения робота также не происходит. В связи с этим сигналы с выходов блока 14 прогнозирования траектории движения и БОЭЭ 15 отсутствуют, и задатчик формы траектории движения 16, задатчик параметров траектории движения 17 и задатчик параметров локальной области 18 передают в блок 5 управления заранее предустановленные значения. Блок определения экономической эффективности 15 задает режим обхода препятствий, сигнал с выхода блока 25 переключения режимов распознавания отсутствует, и информация с выхода БОИ 10 поступает через блок коммутации 9 в БСИРД 8. В свою очередь, информация о температуре, структуре и геометрических параметрах окружающих объектов поступает соответственно с выходов БИС 20, БОСО 21 и БОИ 22 в блок распознавания препятствий 23.
В исходном состоянии сигнал с выхода блока 26 тактильных сенсоров отсутствует, блок анализа ошибок распознавания 27 изначально не имеет информации об ошибках распознавания, сигнал с его выхода отсутствует и обучения блока распознавания препятствий 23 не происходит.
По сигналам с выходов задатчиков (задатчика формы траектории движения 16 и задатчика параметров траектории движения 17), с учетом информации об окружающих объектах и текущем местоположении, получаемой соответственно с выхода блока распознавания препятствий 23 и блока глобального позиционирования 4, блок 5 управления формирует соответствующие команды. Команды с выхода блока управления 5 подаются в блок исполнительных элементов 6, и AMP начинает движение.
Спустя промежуток времени Δt, необходимый для вывода двигателей на номинальный режим работы и установления средней скорости движения в заданное значение, блок управления 5 вырабатывает сигнал, поступающий на вход блока синхронизации 12. Последний вырабатывает последовательности импульсов синхронизации, подаваемых на вход блоков получения и обработки изображений 10 и 11, для обеспечения возможности получения этими блоками информации об одном и том же участке местности. Информация с выхода блоков 10, 11 и 4 поступает на входы БСИРД 8, где осуществляется картографирование поверхностного распределения БМРП требуемого вида. По мере движения AMP информация в БСИРД 8 накапливается и передается в блок 14 прогнозирования траектории движения, где составляется прогноз о поверхностном распределении дикоросов. Затем полученная информация поступает в БОЭЭ 15, который определяет наиболее выгодные с экономической точки зрения локальные участки местности и параметры этих участков. Сигнал с первого выхода БОЭЭ 15 передает информацию о наиболее выгодных участках местности в блок 14 прогнозирования траектории движения, который определяет экономически наиболее выгодный маршрут движения робота. Информация о спрогнозированном маршруте с выхода блока 14 передается на входы задатчиков 16 и 17. При этом по характеру взаимного расположения областей с помощью задатчика 16 определяется оптимальная форма траектории движения, а по геометрическим параметрам локальных областей, через которые проходит предполагаемый маршрут, по расстоянию между областями и общей протяженности маршрута с помощью задатчика 17 определяются оптимальные параметры траектории движения. Таким образом, задатчики 16 и 17 корректируют заранее предустановленные значения параметров и формы траектории движения и передают новые значения в блок управления 5, на первый вход которого поступает информация с выхода блока GPS 4. Блок 5 управления по координатам, получаемым с выхода GPS 4, определяет: достигнута ли граница глобальной области. При достижении AMP границы глобальной области блок управления 5 определяет параметры движения робота таким образом, чтобы избежать пересечения границы глобальной области и, в то же время, максимально обеспечить полученные с выходов задатчиков 16 и 17 параметры траектории движения. По полученным параметрам блок управления 5 формирует и передает сигналы на исполнительные элементы 6.
С целью повышения технико-экономических показателей движение робота внутри локальной области осуществляется с переменными параметрами траектории движения. Коррекция этих параметров осуществляется таким образом, чтобы обеспечить процесс сбора преимущественно внутри экономически наиболее выгодной локальной области, граница которой определяется по факту ее достижения. Для этого по выделенным БОЭЭ 15 наиболее выгодным участкам местности с помощью задатчика параметров локальной области 18 устанавливаются ожидаемое значение поверхностной плотности распределения БМРП требуемого вида внутри области и правила определения границ локальных областей (фактическая граница области с заданной поверхностной плотностью распределения, граница в виде выделенного многоугольника внутри области с заданной поверхностной плотностью распределения и т.п.), которые передаются в блок управления 5. Блок управления 5 по информации о поверхностной плотности распределения БМРП требуемого вида непосредственно впереди робота, поступающей с выхода БСИРД 8, определяет фактическую границу локальной области. При достижении AMP этой границы блок 5 управления определяет параметры движения для следующего интервала времени таким образом, чтобы оставаясь преимущественно внутри локальной области, одновременно поддерживать получаемые с выходов задатчиков 16, 17 значения формы и параметров траектории движения. При этом осуществляется модуляция формы и параметров траектории движения границей локальной области.
Непрерывно с момента начала движения AMP информация с выходов блоков БИС 20, БОСО 21 и БОИ 22 поступает в блок распознавания препятствий 23, который по информации о температуре объекта и его геометрических параметрах определяет: является ли объект препятствием или нет. При идентификации объекта в качестве препятствия соответствующий сигнал поступает в блок управления 5, который формирует команды обхода препятствия и передает их на исполнительные элементы 6.
С целью сокращения временных затрат на достижение роботом экономически наиболее выгодных областей с БМРП требуемого вида и повышения тем самым технико-экономических показателей в данном устройстве предусмотрен режим преодоления препятствий, который реализован следующим образом. В момент появления препятствия в непосредственной близости на пути движения робота блок распознавания препятствий 23 подает соответствующий сигнал в блок 15 определения экономической эффективности, который определяет экономическую целесообразность в преодолении препятствий. При наличии экономической целесообразности в преодолении препятствий БОЭЭ 15 подает сигнал в блок переключения режимов распознавания 25, который осуществляет переключение посредством блока 9 коммутации канала передачи информации от БОИ 10 к блоку распознавания препятствий 23 и подает сигнал в блок распознавания препятствий 23 для настройки последнего на классификацию объекта по признаку: преодолимое препятствие/непреодолимое препятствие. Блок 23 распознавания препятствий с помощью информации о текущих внутренних параметрах робота, получаемой с выхода блока 24 технической диагностики, определяет возможность преодоления препятствия. Результат классификации поступает в блок 5 управления, где принимается решение по обходу или по преодолению препятствия, и соответствующие команды поступают в блок исполнительных элементов 6.
При поступлении в процессе движения AMP сигнала в блок 5 управления от блока тактильных сенсоров 26, блок управления 5 вырабатывает команды останова робота, отката назад на расстояние, достаточное для совершения маневра по обходу препятствия и собственно обхода препятствия с учетом информации об объекте, получаемой с выхода блока горизонтального зрения 19, и подает эти команды в блок исполнительных элементов 6. После обхода препятствия AMP продолжает движение согласно описанной выше логике работы устройства. Сигнал с выхода блока тактильных сенсоров 26 при поступлении его в блок управления 5 одновременно поступает также в блок 27 анализа ошибок распознавания, который по информации с выхода блока распознавания препятствий 23 определяет: связано ли срабатывание тактильного сенсора с ошибкой в распознавании. Если это так, то информация о параметрах препятствия передается в блок анализа ошибок распознавания. 27. В том случае, если процент ошибок распознавания превышает заранее заданное значение, блок 27 анализа ошибок распознавания передает всю накопленную информацию об ошибках в блок обучения 28, который предает соответствующие сигналы в блок распознавания препятствий 23 для дообучения последнего.
С момента поступления информации от блоков 10 и 11 получения и обработки изображений в БСИРД 8 последний передает информацию о поверхностной плотности распределения БМРП на пройденных участках местности соответственно до и после процесса сбора в блок 13 контроля эффективности сбора. Блок контроля эффективности сбора 13 вычисляет коэффициент собираемости БМРП и оценивает по нему эффективность сбора. Коэффициент собираемости К и оценка эффективности сбора могут быть вычислены различными способами. Например, в качестве дифференциальной оценки значение величины К может быть вычислено по формуле

где ρ2 - поверхностная плотность распределения БМРП требуемого вида на участке местности до сбора;
ρ1 - поверхностная плотность распределения БМРП требуемого вида на том же участке местности после сбора.
Интегральная оценка величины К может быть определена как
где i - индекс участка местности;
N - количество проверяемых участков.
Оценка эффективности собираемости БМРП определяется в результате сравнения вычисленного коэффициента собираемости К с заранее предустановленным значением минимального коэффициента собираемости Кmin
Единица соответствует неэффективному сбору, ноль - эффективному сбору. В случае, если сбор оказывается неэффективен, передается сигнал в блок управления 5. Блок 5 управления вырабатывает команды выключения рабочего органа 2, останова робота и сигнализации о возможной неисправности и подает их на исполнительные элементы 6. Выработка блоком 5 управления команд останова робота и сигнализации о возможной неисправности может быть также вызвана сигналом о неисправности одного из узлов робота, получаемого с выхода блока 24 технической диагностики.
Устройство на аппаратном уровне может быть реализовано с использованием стандартных узлов, выпускаемых как отечественными (например, блок автономного энергообеспечения, блок исполнительных элементов), так и зарубежными (например, блоки вертикального и горизонтального зрения) производителями. В частности, блоки получения и обработки изображений (БОИ №1, БОИ №2 и БОИ №3) могут быть выполнены на базе прецизионной системы технического зрения для мобильных роботов MobileRanger Stereovision System фирмы Mobile Robots Inc. [18]. Блок инфракрасных сенсоров может быть выполнен на базе тепловизора Testo-880-3 Profi [19]. В качестве блока глобального позиционирования может использоваться стандартный GPS-приемник UBX-G5010 фирмы U-blox [20]. Блок технической диагностики может быть выполнен с использованием стандартных электронных компонентов отечественного или зарубежного производства с учетом рекомендаций, подробно описанных в работах [21-23]. Блок определения структуры объекта может быть выполнен на основе специализированного радара, выпускаемого НТП "Тензор" [24]. Что касается блока управления, БОЭЭ, блока прогнозирования траектории движения и БСИРД, то они могут быть реализованы на базе ПК. При этом в целях экономии автономной энергии предпочтительно использование переносных ПК или ноутбуков. Блок распознавания препятствий, блок анализа ошибок распознавания и блок обучения также могут быть реализованы на базе ноутбука. При этом в качестве метода распознавания и обучения авторы предлагают использовать индуктивный метод самоорганизации моделей, который автоматически находит знание об объекте непосредственно по выборке данных [25, 26]. Этот же метод можно использовать в качестве основного при реализации блока прогнозирования траектории движения, поскольку метод обеспечивает возможность получения достоверного долгосрочного прогноза [26].
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уничтожения колорадских жуков на посадках картофеля | 2020 |
|
RU2733285C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| Способ картографирования местности для автономных транспортных средств | 2021 |
|
RU2784310C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ ПОСТРОЕНИЯ МАРШРУТА ДВИЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО СЕРВИСНОГО РОБОТА В ТОРГОВОМ ПОМЕЩЕНИИ | 2021 |
|
RU2769710C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Устройство для сбора ягод | 2022 |
|
RU2802069C1 |
Изобретение относится к области робототехники и может быть использовано для автономного управления машинами специального назначения в условиях естественной среды. Технический результат - обеспечение работоспособности устройства в условиях естественной среды. По ходу движения робота производится накопление и анализ информации о поверхностной плотности распределения биологической массы растительного происхождения требуемого вида для прогнозирования экономически наиболее выгодного маршрута движения робота и определения оптимальных параметров траектории движения. Устройство способно обходить либо преодолевать препятствия в зависимости от экономической целесообразности одного из этих действий. При этом, в случае необходимости, устройство способно дообучаться распознаванию препятствий, используя накопленную информацию об окружающих объектах. 2 н. и 7 з.п. ф-лы, 1 ил.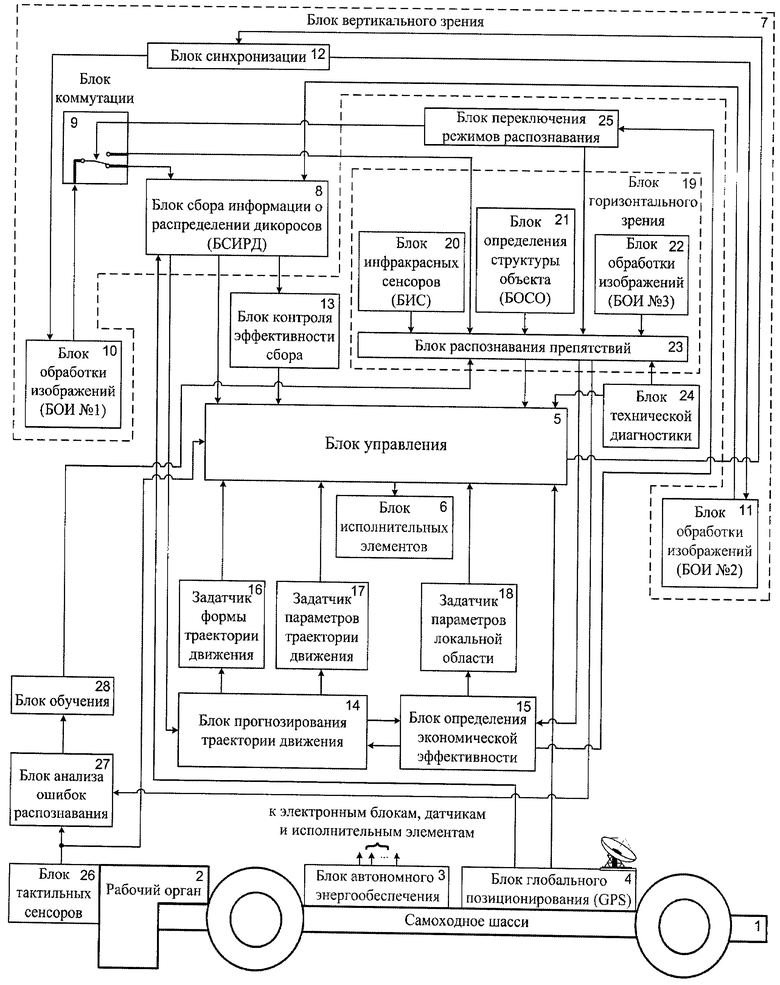
1. Автономный мобильный робот для сбора дикоросов, содержащий самоходное шасси, рабочий орган, блок автономного энергообеспечения, блок глобального позиционирования (GPS), выход которого соединен с входом блока управления, а выход блока управления соединен с входом блока исполнительных элементов, блок вертикального зрения, содержащий блок получения и обработки изображений (БОИ №1), отличающийся тем, что он снабжен блоком прогнозирования траектории движения, задатчиком формы траектории движения, задатчиком параметров траектории движения, блоком определения экономической эффективности (БОЭЭ) и задатчиком параметров локальной области, а в состав блока вертикального зрения введен блок сбора информации о распределении дикоросов (БСИРД), первый выход которого соединен со вторым входом блока управления, первый вход БСИРД соединен с выходом БОИ №1, второй вход соединен со вторым выходом блока глобального позиционирования, причем первый вход блока прогнозирования траектории движения соединен со вторым выходом БСИРД, а первый и второй выходы блока прогнозирования траектории движения соединены с входами соответственно задатчика формы траектории движения и задатчика параметров траектории движения, выходы которых соединены соответственно с третьим и четвертым входами блока управления, третий выход блока прогнозирования траектории движения соединен с первым входом блока определения экономической эффективности (БОЭЭ), первый выход которого соединен со вторым входом блока прогнозирования траектории движения, второй выход соединен с входом задатчика параметров локальной области, выход которого соединен с пятым входом блока управления.
2. Робот по п.1, отличающийся тем, что он снабжен блоком контроля эффективности сбора, вход которого соединен с третьим выходом БСИРД, а выход соединен с шестым входом блока управления, а в состав блока вертикального зрения введен дополнительный блок получения и обработки изображений (БОИ №2), выход которого соединен с третьим входом БСИРД.
3. Робот по п.2, отличающийся тем, что в состав блока вертикального зрения введен блок синхронизации, вход которого соединен со вторым выходом блока управления, а первый и второй выходы соединены соответственно с входами БОИ №1 и БОИ №2.
4. Робот по п.1, отличающийся тем, что он снабжен блоком тактильных сенсоров, блоком анализа ошибок распознавания (БАОР), блоком обучения, блоком горизонтального зрения, состоящего из блока инфракрасных сенсоров (БИС), блока определения структуры объекта (БОСО), блока получения и обработки изображений (БОИ №3) и блока распознавания препятствий, первый, второй и третий входы которого соединены соответственно с выходом БИС, выходом БОСО и выходом БОИ №3, при этом первый выход блока распознавания препятствий соединен с седьмым входом блока управления, при этом выход блока тактильных сенсоров соединен с восьмым входом блока управления и с первым входом блока анализа ошибок распознавания (БАОР), второй вход которого соединен со вторым выходом блока распознавания препятствий, а выход БАОР соединен с входом блока обучения, выход которого соединен с четвертым входом блока распознавания препятствий.
5. Робот по п.4, отличающийся тем, что он снабжен блоком технической диагностики, первый выход которого соединен с пятым входом блока распознавания препятствий, второй выход соединен с девятым входом блока управления, и блоком переключения режимов распознавания, вход которого соединен с третьим выходом БОЭЭ, первый выход соединен с шестым входом блока распознавания препятствий, при этом в блок вертикального зрения введен блок коммутации, первый вход которого соединен со вторым выходом блока переключения режимов распознавания, первый вход БСИРД соединен с выходом БОИ №1 через первый выход и второй вход блока коммутации, второй выход которого соединен с седьмым входом блока распознавания препятствий, третий выход которого соединен со вторым входом БОЭЭ.
6. Способ управления автономным мобильным роботом для сбора дикоросов, включающий глобальную навигацию робота в заданных пределах местности с помощью блока глобального позиционирования, получение изображения земной поверхности с помощью блока получения и обработки изображений, анализ полученных изображений, формирование информации о биологической массе растительного происхождения (БМРП) требуемого вида, по которой блок управления формирует и подает соответствующие команды в блок исполнительных элементов для осуществления процесса сбора, отличающийся тем, что с помощью блока глобального позиционирования и блока вертикального зрения осуществляют картографирование неизвестной местности, с помощью блока прогнозирования траектории движения и блока определения экономической эффективности составляют прогноз о поверхностном распределении БМРП, определяют экономически наиболее выгодные локальные области с БМРП, находят оптимальный с точки зрения экономической эффективности маршрут движения робота и с помощью задатчика формы траектории движения и задатчика параметров траектории движения устанавливают соответственно форму и параметры траектории движения робота, при этом по найденным параметрам траектории с учетом текущей информации о местонахождении робота и о поверхностном распределении БМРП непосредственно впереди по курсу движения робота с помощью блока управления определяют параметры движения робота, причем непосредственно управление движением автономного робота осуществляют с помощью блока управления, как с учетом спланированного направления движения, так и с учетом информации о препятствиях на пути робота, полученной с помощью блока горизонтального зрения и блока тактильных сенсоров.
7. Способ по п.6, отличающийся тем, что движение робота внутри спрогнозированной локальной области местности осуществляют с переменными параметрами траектории движения, адаптивно изменяющимися в зависимости от границы локальной области, определяемой с помощью блока вертикального зрения.
8. Способ по п.6, отличающийся тем, что с помощью БОЭЭ определяют и сравнивают экономическую эффективность движения робота с преодолением препятствий и с обходом препятствий без их преодоления и с помощью блока переключения режимов распознавания задают режим движения робота как обход препятствий или преодоление препятствий, при этом при обнаружении препятствия в режиме преодоления препятствий с помощью блока коммутации осуществляют переключение канала передачи информации от БОИ №1 в блок распознавания препятствий, затем по трехмерным геометрическим параметрам объекта, информации о его структуре и температуре с помощью блока распознавания препятствий классифицируют объект по признаку преодолимое препятствие или непреодолимое препятствие и в зависимости от результата классификации с помощью блока управления осуществляют либо обход препятствия, либо его преодоление, причем при обходе препятствия, либо после его преодоления осуществляют обратное переключение канала передачи информации от БОИ №1 в БСИРД.
9. Способ по п.6, отличающийся тем, что с помощью блока анализа ошибок распознавания накапливают информацию о параметрах неправильно распознанных объектов, определяют количество актов неправильного распознавания и при превышении процента ошибок заранее определенного значения с помощью блока обучения осуществляют дообучение блока распознавания препятствий с учетом накопленной информации.
| RU 2007107468 А, 10.09.2008 | |||
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 A, 04.08.1998. | |||

