Изобретение относится к области робототехники, предназначено для управления высокоадаптивными и высокоманевренными автономными мобильными роботами (AMP) различного назначения.
Устройство позволяет:
1) осуществлять скоростной ввод и скоростную фильтрацию видеоинформации, поступающую от дальнодействующих 2D и 3D видеодатчиков (видеокамер, лидаров, стереокамер и т.п.), установленных на борту AMP;
2) сверхбыстро синтезировать геометрические модели содержимого 3D сцен (на основе введенной и отфильтрованной видеоинформации);
3) выполнять скоростной анализ синтезированных моделей сцен с целью:
- распознавания 2D и 3D объектов-ориентиров (или объектов-целей) по их геометрической форме, габаритам и окраске;
- поиска безопасных траекторий движения AMP с обходом препятствий;
4) определять текущие угловые и линейные мировые (абсолютные, географические) координаты AMP и окружающих его объектов, первоначально формируемые бортовой инерциальной системой навигации AMP и периодически корректируемые на маршруте движения AMP при обнаружении объектов-ориентиров;
5) выбрать оптимальную траекторию движения AMP (из числа безопасных траекторий, найденных ранее бортовыми навигационными видеоанализаторами AMP), рассчитать необходимые сигналы воздействия на исполнительные органы AMP (учетом маневровых возможностей AMP) и физически реализовать выбранную траекторию движения (с максимально возможной точностью).
Известно устройство управления адаптивным мобильным роботом [1], содержащее блок сенсорных датчиков, выходы которого соединены с входами блока формирования модели внешней среды, чьи выходы подключены к первым входам вычислительного блока, вторые входы которого связаны со вторыми выходами блока исполнительных устройств, а выходы подключены к входам m-стабильного триггера. В качестве вычислительного блока используется нейросеть, содержащая матрицу k⋅m ключевых элементов. Кроме того, в указанном аналоге имеется схема сравнения, блок задания движения, блок задания констант, блок регулирования, блок определения координат робота, блок датчиков внутренней информации.
Главным недостатком данного аналога является его плохая приспособляемость (низкая адаптивность) к незнакомой геометрически сложной и изменяющейся во времени внешней среде (тем более, когда форма и самого AMP меняется в ходе движения).
Указанный недостаток объясняется применением нейросети в качестве основного вычислительного блока. В настоящее время эффективность работы нейросетей доказана только на примерах небольших нейросетей, предназначенных для решения простых, хорошо сформулированных задач [2], хотя даже здесь точность получаемых решений не может считаться приемлемой для использования подобных устройств в системах управления AMP, предназначенных для выполнения ответственных видов работ (а этих работ большинство!). На наш взгляд, рассматриваемый аналог не может обеспечить высокую надежность функционирования AMP при выполнении ответственных видов работ вследствие низкой адаптируемости данного аналога к реальным условиям, из-за:
- низкой точности распознавания окружающих объектов и низкой точности управления роботом (т.к. невозможно при обучении нейросети смоделировать все возможные сочетания состояний внешней среды и состояний самого AMP);
- больших временных затрат, требующихся нейросети для ее самообучения. Низкая приспособляемость этого аналога к сложной окружающей обстановке может привести к выработке неверных (катастрофических по своим последствиям) управляющих воздействий на сервоприводы автономного мобильного робота.
Гораздо более успешными, на наш взгляд, являются аналоги заявленного устройства, построенные на базе аппаратно-программных технологий обработки 2D изображений и 3D сцен (АПТОС). В отличие от предыдущего аналога в программируемых вычислителях (ПВ) [3, 4] обработка видео и графической информации представляет собой последовательный процесс, когда команда выполняется за командой, процедура за процедурой. В основе любой АПТОС лежит три основных компонента:
1) тип применяемого программируемого вычислителя (тип ПВ);
2) применяемый метод геометрического моделирования;
3) применяемые математические и алгоритмические методы обработки геометрических моделей, опирающиеся на возможности ПВ выбранного типа. Применение АПТОС позволяет:
- отказаться от предварительного этапа обучения устройства;
- использовать для выработки решений только самую актуальную (текущую) информацию о конкретной сцене, полученную от бортовых датчиков конкретного AMP в данный момент времени и с известным (текущим) состоянием AMP;
- использовать для аргументации выбранных решений богатейший (веками наработанный человечеством) математический и алгоритмический аппараты, а не просто довериться результатам работы нейросети (полученным не совсем понятным образом).
Сейчас при разработке систем управления AMP наибольшее применение нашли традиционные АПТОС, основанные на применении универсальных компьютеров с центральным процессором (CPU), а также аппаратно-программные технологии CUDA, основанные на применении графических процессоров (GPU) [3, 4]. Компонентами этих АПТОС являются:
- традиционные типы ПВ, системы команд которых оперируют адресуемыми двоичными числами (по-другому, одномерными адресуемыми бинарными изображениями - 1D-АБИ) и предназначены только арифметической и булевой обработки этих чисел;
- геометрические модели объектов, описываемые с помощью арифметических чисел (координат точек, коэффициентов уравнений и т.п.) и представленные в ПВ в виде массивов байтов, машинных слов и т.п. (т.е. в виде массивов 1D-АБИ);
- применение математических и алгоритмических методов обработки геометрической информации, базирующихся на арифметической обработке чисел (методов аналитической геометрии, линейной алгебры, методов числовой обработки изображений и т.п.).
Однако применение этих традиционных АПТОС в аналогах заявленного устройства, значительно снижает уровень адаптивности AMP. Это объясняется тем, что данные АПТОС обладают крайне низкой степенью распараллеливания основных процедур обработки сцен (ОПОС), к которым относятся:
- теоретико-множественные операции над геометрическими моделями объектов;
- анализ геометрических моделей объектов на пересекаемость;
- аффинные геометрические преобразования;
- операции вычисления объема (площади) геометрической модели;
- операции по локализации местоположения модели в пространстве.
В результате время выполнение каждой ОПОС в указанных аналогах чрезвычайно сильно зависит от числа и геометрической сложности объектов обрабатываемой сцены. Поскольку реальные сцены, внутри которых функционирует AMP, обладают, как правило, исключительно высокой геометрической сложностью и непостоянством во времени, это делает время выполнения автоматического анализа сцены недопустимо большим (когда полученный результат машинного анализа уже потерял свою актуальность).
Наиболее близким к заявленному устройству (прототип) является устройство управления автономным роботом [12], базирующееся на применении принципиально новой воксельной АПТОС, компоненты которой и методы ее применения для управления AMP подробно освещены в работах [5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21]. Основными компонентами воксельной АПТОС являются:
1) воксельный вычислитель (ВВ), система команд которого содержит помимо команд обработки адресуемых двоичных чисел (т.е. 1D-АБИ), также и команды обработки 2D-АБИ (формата q3×q3), и команды обработки 3D-АБИ (формата q2×q2×q2), где q=2, 3, 4 … - число целое);
2) дискретные 2D (пиксельные) и 3D (вексельные) геометрические модели различного разрешения, описываемые одним или несколькими 2D-АБИ или 3D-АБИ;
3) методы высокопараллельной обработки 2D и 3D бинарных, полутоновых и цветных изображений, базирующиеся на преимуществах системы команд ВВ.
Применение воксельной АПТОС позволяет выполнять ОПОС с чрезвычайно высокой степенью распараллеливания независимо от геометрической сложности обрабатываемых сцен. Это ускоряет процесс обработки геометрической информации и позволяет предложить новые способы такой обработки.
В прототипе функцию основных составных частей ВВ выполняют блок программного управления и блок обработки, хранения и визуализации изображений (БОХВИ).
Недостатками прототипа являются:
1) низкая скорость анализа 3D сцен, сканируемых одновременно сразу несколькими бортовыми видеодатчиками AMP (что снижает адаптивные и функциональные возможности AMP);
2) отсутствие возможности выполнять в устройстве одновременно и процесс видеомониторинга окружающей 3D сцены, и процесс управления (регулирования) исполнительными органами AMP (что снижает адаптивные и функциональные возможности AMP);
3) низкая скорость ввода информации, получаемой от видеодатчиков AMP, а также низкая скорость вывода (визуализации) видеоинформации, синтезированной ранее устройством, на контрольные видеомониторы и телевизионные передатчики (ТВ-передатчики), что снижает функциональные и адаптивные возможности AMP;
4) низкий уровень унификации составных частей прототипа, ответственных за ввод, обработку и визуализацию графической информации о сценах (что повышает стоимость устройства, снижает его надежность, увеличивает время проектирования специализированных вариантов AMP).
Первый недостаток прототипа обусловлен примененим в нем одной и той же процессорной матрицы q2×q2×q2 для обработки всех сцен, наблюдаемых одновременно всеми бортовыми видеодатчиками AMP.
Второй недостаток прототипа вызван применением одной и той же процессорной матрицы q2×q2×q2 как для целей управления (регулирования) исполнительными органами AMP, так и для целей проведения видеомониторинга окружающего пространства.
Третий недостаток прототипа связан с тем, что:
- ввод оцифрованной видеоинформации из видеокамеры в процессорную матрицу q2×q2×q2 объясняется применением узкого канала передачи видеоданных (обмен осуществляется бинарными изображениями формата 1×q2×q2 или формата q×q2×q2, имеющими относительно низкое разрешение по сравнению с каналом формата q2×q2×q2), а также отличием частоты работы матрицы q2×q2×q2 от частоты работы видеодатчиков;
- низкая скорость вывода видеоинформации из матрицы q2×q2×q2 на вход контрольного монитора (или ТВ-передатчика) объясняется узким каналом передачи видеоданных (обмен осуществляется бинарными изображениями 1×q2×q2 или q×q2×q2, имеющими низкое разрешение) на вход контрольного монитора (или ТВ-передатчика).
Четвертый недостаток прототипа объясняется тем, что универсальный вариант прототипа, призванный стать единым для целой линейки AMP, должен обладать крайне высокой аппаратурной и программной избыточностью (способной обеспечить полноценное функционирование самого сложного варианта AMP из указанной линейки). Значит, универсальный вариант устройства будет уступать (в общем случае) его более специализированному конкуренту по стоимости и массо-габаритным характеристиками. В то же время полный отказ от унификации приведет к снижению надежности, к чрезмерным финансовым затратам, связанным с необходимостью проектирования и изготовления недопустимо большой номенклатуры специализированных вариантов устройства, отличающихся назначением, производительностью и стоимостью (поскольку каждый тип AMP потребует свой вариант прототипа). У прототипа этот универсальный вариант будет чрезвычайно избыточен. Кроме того, видеокамеры, мониторы, ТВ-приемники и ТВ-передатчики, выпускаемые сейчас серийно, могут быть использованы в прототипе только после существенной доработки их систем ввода-вывода, что дополнительно увеличивает стоимость прототипа.
Целью изобретения является расширение адаптивных и функциональных возможностей устройства, снижение стоимости устройства, повышение его надежности, сокращение сроков проектирования вариантов устройства, предназначенных для примененеия в AMP различного назначения.
Указанная цель достигается тем, что блок программного управления устройства структурно разбит на главный контроллер (1), на ему подчиняющийся контроллер (7) системы компьютерного зрения (СКЗ) и на контроллеры (15) отдельных навигационных видеоанализаторов (8), подчиняющиеся общему контроллеру СКЗ (7); каждый контроллер НВА (15) и управляемый им блок (16) обработки (БОБИ) адресуемых бинарных 2D и 3D изображений (2D-АБИ и 3D-АБИ), обрабатывающий 2D-АБИ и 3D-АБИ с предельно высокой степенью параллелизации, образуют вместе один навигационный видеоанализатор (8), устройство содержит несколько таких однотипных НВА (8), в каждый из которых дополнительно введены: контроллер (25) управления ПМ, узел (26) оцифровки видеосигналов, узел (27) ввода видеоданных и узел (28) вывода видеоданных из ПМ; при этом контроллер (25) управления ПМ состоит из микропрограммного автомата (МПА) ввода видеоданных (44), МПА вывода видеоданных на монитор (45) и МПА вывода видеоданных на телевизионный передатчик (46), узел (26) оцифровки видеосигналов состоит из коммутатора (49) видеосигналов, генератора (47) тактовых импульсов, аналого-цифрового преобразователя (48) значения уровня видеосигнала и селектора (50) синхроимпульсов; узел (27) ввода видеоданных включает в себя коммутатор (51) видеоданных и синхросигналов, а также входной видеобуфер (52), состоящий из (μ+1) двоичных сдвиговых регистров одинаковой разрядности с общим управлением, последовательный информационный вход каждого из этих сдвиговых регистров через собственный коммутатор (51) соединен со своим разрядом выходного (μ+1)-разрядного информационного кода параметра, передаваемого видеодатчиком (10), а каждый из параллельных информационных выходов регистров видеобуфера (52) соединен с информационным входом «Видео» своего процессора (30), дополнительно введенным в состав каждого мультиплексора (32); узел (28) вывода видеоданных из матрицы (20) содержит выходной видеобуфер (53), состоящий из цифро-аналогового преобразователя (ЦАП) уровня выводимого видеосигнала (54) и (w+1) двоичных сдвиговых регистров одинаковой разрядности с общим управлением, число которых совпадает с числом двоичных разрядов кода значения уровня выводимого видеосигнала, каждый из параллельных информационных входов этих регистров взаимнооднозначно соединен с выходом своего процессора (30), а их последовательные выходы соединены с одноименными входами ЦАП (54), выходы которого (54) соединены с аналоговыми входами монитора 55 или ТВ-передатчика 56.
В отличие от прототипа заявленное устройство позволяет:
1) одновременно осуществлять видеомониторинг сразу нескольких сцен, сканируемых бортовыми видеодатчиками AMP;
2) одновременно выполнять и видеомониторинг окружающих сцен, и регулирование исполнительными органами, передвигающими AMP;
3) ускорить ввод и вывод видеоинформации за счет использования (q2×q2×q2)-форматного канала передачи видеоинформации, обладающего в q раз большей пропускной способностью, чем (q×q2×q2)-форматный канал ввода-вывода в прототипе;
4) использовать один и тот же тип навигационного видеанализатора 8 (наиболее сложного компонента заявленного устройства) для управления AMP различного назначения, а также использовать серийно-выпускаемые видеодатчики, мониторы, телевизионные (ТВ) приемники и ТВ-передатчики без какой-либо их доработки.
На фиг. 1 изображена общая структурная схема устройства управления AMP. На фиг. 2 показана структурная схема навигационного видеоанализатора 8 (НВА). Фиг. 3 демонстрирует вариант расположения видеодатчиков на корпусе AMP. На фиг. 4 и 5 показаны системы координат, используемые при синтезе воксельной модели содержимого сканируемой сцены. На фиг. 6 изображен вариант схемы одноразрядного процессора матрицы q2×q2×q2. На фиг. 7 показана функциональная схема процессорной строки q2×1×1 матрицы 20. На фиг. 8 показана функциональная схема ввода видеоданных в процессорную матрицу q2×q2×q2. На фиг. 9 показана функциональная схема контроллера 25 управления процессорной матрицей q2×q2×q2. На фиг. 10 изображен коммутатор 42 кода управления матрицей 20. Фиг. 11 иллюстрирует ввод видеоданных с выходов датчиков 10 в матрицу 20 и вывод видеоданных на монитор и ТВ-передатчик. Фиг. 12 поясняет работу микроавтомата 44 ввода видеоданных в процессорную матрицу 20. Фиг. 13 иллюстрирует процесс синтеза воксельной модели содержимого сцены по данным сканирующего дальномера. Фиг. 14 иллюстрирует процесс синтеза воксельной модели содержимого сцены по данным стереокамеры. Фиг. 15 демонстрирует применение корреляционного метода в устройстве для поиска корреспондирующих пикселей на стереопаре.. Фиг. 16 иллюстрирует использование в устройстве различных ракурсных воксельных моделей зонда для распознавания объекта-ориентира. На фиг. 17 показан спектр псевдопрямых, используемых НВА при поиске безопасных траекторий. Виды траекторий движения AMP, рассчитываемые устройством, показаны на фиг. 18. Фиг. 19 и фиг. 20 иллюстрируют принцип автоматического поиска обхода препятствий, реализуемый средствами НВА. На фиг. 21 показаны концептуальная модель наземного AMP и способы ее применения для поиска безопасного маршрута движения AMP по условно-гладкой поверхности. Фиг. 22 поясняет работу микропрограммных автоматов 45 и 46 при выводе видеоданных из процессорной матрицы 20. На фиг. 23 изображен вариант пространственной интерпретации содержимого участка памяти 38 в виде БСИ формата q4×q4×q4, состоящего из q6 АБИ-фрагментов q2×q2×q2 для q=3. Фиг. 24 демонстрирует принцип моделирования геометрического преобразования (ГП) дискретизирующим отображением (ДО). Фиг. 25, 26 и 27 иллюстрируют процедуру расшивки, поворота и сшивания варианта 3D-БСИ в видеоанализаторе 8. Фиг. 28 поясняет метод виртуального зондирования 3D сцены, используемый в устройстве при решении задач распознавания и маршрутизации. Фиг. 29 демонстрирует реализацию метода ВЗС в видеоанализаторе 8.
Устройство состоит из главного контроллера 1, системы 2 компьютерного зрения (СКЗ), системы 3 инерциальной навигации (СИН), программатора 4, исполнительных сервоприводов 5. Программируемый контроллер 1 содержит в своем составе дополнительную оперативную память 6. СКЗ включает главный контроллер 7, навигационные видеоанализаторы (НВА) 8, подвижные видеоплатформы 9, видеодатчики 10 и сервоприводы 11. В роли видеодатчиков 10 выступают видеокамеры 12, стереокамеры 13, дальномерные сканеры 14. Каждый НВА 8 состоит из блока 15 программного управления (БПУ), и блока 16 высокопараллельной обработки 2D и 3D бинарных изображений (БОБИ). Блок 15 состоит из микроконтроллера 17 с интерфейсом 18 и интерфейсом 19. Блок 16 включает в себя процессорную матрицу 20 формата q2×q2×q2 (где q=2, 3, 4, … - число целое), буферную память 21 (q×q2×q2)-форматных фрагментов (q2×q2×q2)-форматных АБИ (БПФАБИ), оперативную память 22 (q×q2×q2)-форматных фрагментов АБИ (ОПФАБИ), формирователь 23 кода заполнения АБИ (КЗАБИ), вычислитель 24 меры одноцветного содержимого АБИ (ВМАБИ), контроллер 25 управления процессорной матрицей, узел 26 оцифровки видеосигналов, узел 27 ввода видеоданных в матрицу 20, узел 28 вывода видеосигналов из матрицы 20, коммутатор 29 вывода числовых данных из матрицы 20. Матрица 20 состоит из q6 одноразрядных однотипных двоичных процессоров 30, связанных между собой межпроцессорными связями. Каждый (i,j,k)-й процессор 30 состоит из одноразрядного локального узла 31 памяти, одноразрядного коммутатора 32, одноразрядного регистра-триггера 33 первого операнда, регистра-триггера 34 второго операнда, регистра-триггера 35 вычисления меры, арифметико-логического узла 36 и ключа 37. Все q6 узлов 33 матрицы 20 образуют вместе сверхоперативную память 38 АБИ (СПАБИ). Все q6 регистров 33 матрицы 20 образуют (q2×q2×q2)-форматный регистр 39 первого АБИ-операнда. Все q6 регистров 34 матрицы 20 образуют (q2×q2×q2)-форматный регистр 40 второго АБИ-операнда. Все q6 регистров 35 матрицы 20 образуют (q2×q2×q2)-форматный регистр 41. Контроллер 25 включает в себя коммутатор 42 кода управления матрицей 20. Узел 42 состоит из микроавтомата 44 ввода видеоданных, микроавтомата 45 вывода видеоданных на монитор и микроавтомата 46 вывода видеоданных на ТВ-передатчик. Узел 26 оцифровки видеосигналов содержит генератор 47, аналого-цифровой преобразователь 48, коммутатор 49 видеосигналов селектор 50 синхроимпульсов. Узел 27 содержит коммутатор 51 и входной видеобуфер 52, состоящий из двоичных сдвиговых регистров, имеющих общее управление и каждый из которых содержит одинаковое число разрядных триггеров 52. В состав видеоузла 28 входит выходной видеобуфер 53, состоящий из двоичных сдвиговых регистров, имеющих общее управление, а также цифро-аналоговый преобразователь 54. Кроме того, в состав устройства могут дополнительно входить радиомодем 55, связанный через последовательный интерфейс с контроллером 1, а также ТВ-передатчики 56 и ТВ-приемники 57 (для обмена видеоданными и числовыми данными с человеком-оператором или с другими AMP).
Устройство работает следующим образом.
1. Термины, используемые при описании работы устройства
1.1. Видеонавигация автономного мобильного робота (AMP)
В зависимости от глубины охвата исследуемой территории навигация AMP может осуществляться на глобальном, локальном и персональном уровнях. Наиболее востребованными (с точки зрения частоты применения) и наиболее проблемными (с точки зрения технической реализации) являются локальный и персональный уровни, т.к. на этих уровнях навигации из-за быстрого перемещения AMP относительно внешних объектов требуется очень частое обновление текущей информации о внешней среде.
Полноценная замена человека автономным мобильным роботом требует наличия в составе AMP высокоскоростных средств для автоматического отображения обстановки вокруг AMP. Выполнению этой цели служит очувствление AMP, в частности, включение в состав AMP бортовой системы компьютерного зрения (СКЗ AMP). Роль бортовых видеодатчиков в такой СКЗ AMP могут выполнять видеокамеры, стереокамеры, лидары, сканеры со структурированной подсветкой и т.п., установленные на корпусе AMP.
Выделим из СКЗ AMP отдельную ее подсистему, отвечающую либо за поиск маршрута движения всего AMP в целом, либо за поиск маршрута движения его отдельной подвижной части (например, манипулятора) в области пространства, сканируемой бортовыми видеодатчиками AMP. Выделенную подсистему назовем бортовым навигационным видеоанализатором (НВА), а вид навигации, осуществляемой с помощью НВА, назовем автоматической бортовой видеонавигацией. Назначением НВА (называемого далее видеоанализатором 8) являются:
- поиск текущего объекта-ориентира внутри отсканированной сцены (окраска и геометрические характеристики которого заданы в программе управления AMP);
- корректировка текущих мировых координат AMP (или его подвижных частей), первоначально полученных от системы 3 инерциальной навигации AMP, когда объект-ориентир (с известными и неизменяющимися во времени мировыми координатами) обнаружен в процессе видеомониторинга окружающей сцены;
- поиск безопасного участка маршрута движения AMP для выхода AMP из наблюдаемой (текущей) сцены в направлении выбранного объекта-ориентира.
Цепочка объектов-ориентиров, расположенных вдоль планируемого маршрута движения AMP (вместе с их геометрическими и цветовыми распознаваемыми признаками), заданы в программе функционирования AMP. Эта цепочка (как и сам маршрут) должна удовлетворять некоторой целевой задаче, стоящей перед AMP (транспортировка груза, разведка местности, поиск животных и т.п.). Чем быстрее и качественнее выполняется расчет участка маршрута движения AMP, тем больше шансов у AMP отреагировать правильно и вовремя на обнаруженные внешние угрозы, возникающие при перемещении AMP. Расчет каждого участка требует проведения, как минимум, двух видеонавигационных анализов сцены, наблюдаемой видеодатчиком 10:
1) анализа на обнаружение текущего 3D объекта-ориентира (или объекта-цели), обладающего заданными габаритами, геометрической формой и окраской, внутри текущей отсканированной сцены (видеонавигационный анализ №1 - ВА1);
2) анализа на обнаружение безопасного маршрута движения AMP, обладающего известными формой и габаритами, внутри текущей анализируемой сцены (видеонавигационный анализ №2 - ВА2).
При движении AMP его текущие мировые координаты отслеживаются бортовой системой 3 инерциальной навигации. Из-за возрастающей погрешности этих координат они должны подвергаться периодической коррекции системой компьютерного зрения AMP в момент, когда объект-ориентир (чьи мировые координаты заранее известны и неизменяемы во времени) обнаружен СКЗ AMP.
1.2. Управляющий цикл автономного мобильного робота
Реальные среды, в которых предстоит функционировать AMP, отличаются крайней геометрической сложностью и временной изменчивостью. В результате расчет маршрута движения AMP и физическая реализация этого маршрута с помощью исполнительных органов AMP (движителей, сервоприводов, реле и др.) могут быть выполнены только в рамках некоторого временного интервала, при котором изменение геометрии окружающей среды маловероятно. Скорость расчета маршрута и маневровые характеристики AMP должны соответствовать этому условию. Назовем указанный временной интервал периодом управляющяющего цикла AMP (периодом УЦ). В течение периода УЦ действует соглашение, что модель сцены, синтезированная в видеоанализаторе 8 в начале УЦ, полностью определена и неизменна во времени. Данное соглашение считается нарушенным лишь в случае возникновения аварийных запросов на прерывание (например, при срабатывании близкодействующих контактных и бесконтактных датчиков, подключенных к главному контроллеру 1). Каждый j-й УЦ включает в себя следующие последовательно выполняемые этапы:
1) ввод информации с видеодатчиков 10 в матрицы 20 видеоанализаторов 8;
2) фильтрацию введенной видеоинформации (удаление шумов);
3) синтез (восстановление) 3D дискретных (вексельных) моделей содержимого наблюдаемых сцен по введенным и отфильтрованным видеоданным;
4) описание синтезированных вексельных моделей содержимого сцен посредством геометрических примитивов: многогранников, фигур второго порядка и т.п. (данный этап в заявленном устройстве не является обязательным);
5) семантическое описание сцен, сформированных на основе их описания геометрическими примитивами (этап в заявленном устройстве не является обязательным);
6) выполнение ВА1 над выбранной геометрической моделью содержимого наблюдаемой сцены с целью обнаружения искомого объекта-ориентира;
7) корректировка мировых координат AMP при обнаружении объекта-ориентира;
8) выполнение ВА2 над выбранной геометрической моделью содержимого наблюдаемой сцены с целью поиска безопасного маршрута прохождения этой сцены;
9) физическая реализация найденного маршрута движения внутри наблюдаемой сцены посредством выработки соответствующих управляющих воздействий на исполнительные органы AMP с одновременным ожиданием запросов на прерывание от таймера (по окончанию j-го УЦ) или от аварийных близкодействующих датчиков;
10) при прерывании от таймера выполняется переход к п. 1 (т.е. к (j+1)-му УЦ).
Для повышения адаптивности AMP к изменениям геометрических характеристик внешней среды, длительность УЦ должна быть минимально возможной. При этом соотношение времени физической реализации j-го участка маршрута ко времени расчета данного участка должно быть оптимальным. Если это соотношение будет ниже оптимального, физически реализованной будет только начальная часть расчетной траектории j-го участка маршрута (т.е. затраты времени и ресурсов на расчет оставшейся части будут напрасными). Если же данное соотношение будет значительно выше оптимального, AMP будет двигаться с недопустимо длительными остановками, снижающими среднюю скорость движения AMP на маршруте. Катастрофическим является случай, когда время расчета маршрута превышает период УЦ. В этом случае AMP просто не сдвинется с места.
1.3. Области пространства, сканируемые видеодатчиками 10
1.3.1 Элементарные области сканирования (ЭОС)
Все видеодатчики 10 являются дальнодействующими и сканирующими. Их системы сканирования по типу делятся на сканирующие системы видеокамер 12, сканирующие системы стереокамер 13, сканирующие системы дальномеров 14. В каждой из этих систем множество возможных положений сканирующего луча образуют вместе прямоугольный растр. Точки растра образуют строки, строки - кадр. В каждой точке растра видеодатчик 10 измеряет значение определенной характеристики сигнала, полученного в результате отражения света от объектов исследуемой сцены. В видеокамерах 12 и в стереокамерах 13 измеряется уровень яркости (или цвета) отраженного оптического сигнала. Сканирущий дальномер 14 (лидар) измеряет дальность от центра сканирования до точек наблюдаемого объекта. Во всех видеодатчиках 10 габариты объектов в направлениях, перпендикулярных сканирующему лучу, отображаются в угловых единицах. Измерение дальности в дальномерах 14 осуществляется в единицах длины. В стереокамерах 13 дальность скрыта в сигналах диспарантности двух фотоизображений (одной стереопары).
Сканируемую 3D область видеодатчика 10 можно представить в виде объединения некоторых взаимно непересекающихся 3D элементарных областей сканирования (ЭОС), потенциально видимых датчиком 10 в каждый момент сканирования (фиг. 13-а, фиг. 15-б). Габариты и форма каждой такой ЭОС в общем случае зависят от типа применяемого видеодатчика 10, от текущего направления сканирования и от удаленности ЭОС от центра сканирования. В видеокамерах 12 число ЭОС совпадает с числом пикселей на фотоизображении, формируемом периодически (с частотой видеокадров) в картинной плоскости объектива камеры 12. В случае если пиксели имеют форму квадрата, каждая ЭОС образована объединением 4-х полупространств, ограниченных плоскостями, проходящими через стороны квадратного пикселя и оптический центр объектива видеокамеры. У видеокамеры 12 объем и протяженность каждой такой ЭОС являются бесконечно большими, поэтому ЭОС видеокамеры 12 не могут быть использованы для локализации в пространстве R3 видимого объекта. Напротив, объем и габариты ЭОС для стереокамер 13 и дальномеров 14 конечны, поэтому их ЭОС могут быть использованы для этой цели (с точностью до габаритов ЭОС).
1.3.2. Представление содержимого отсканированных 3D сцен в памяти 38
В видеоанализаторе 8 на каждом этапе обработки используется свой способ хранения информации об исследуемой сцене в матрице 20. Так на этапе ввода видеоинформации (с видеодатчика 10 в память 38) используется способ адресации АБИ, обеспечивающий максимальную скорость ввода. На этом этапе отсутствует какая-либо корреляция между адресным пространством АБИ памяти 38 и геометрическим пространством исследуемой сцены. На последующих этапах обработки введенной информации эта корреляция возрастает. Это делается для того, чтобы на последующих этапах обработки максимально использовать преимущества воксельной АПТОС по глубокому распараллеливанию ОПОС. На заключительных этапах обработки (ВА1 и ВА2) корреляция превращается в прямую зависимость, когда каждому вокселю 1×1×1 пространства сцены соответствует в памяти 38 только один бит яркости, расположенный в строго определенном месте АБИ, имеющего строго определенный адрес (СПАБИ-адрес), в памяти 38. Именно эта особенность делает особо эффективным метод ВЗС на базе воксельной АПТОС при проведении ВА1 и ВА2.
Сразу после ввода видеоинформации о наблюдаемой сцене используются параметрические псевдо-воксельные модели, состоящие из 3D параметрических псевдо-вокселей Δλ1×Δλ2×Δλ3 (где Δλ1, Δλ2, Δλ3 - постоянные приращения выходных параметров λ1, λ2, λ3 видеодатчика 10). Эти модели строятся на основе значений введенных параметров (яркости и цвета пикселей, дальности точек и т.п.). Затем строится нормализованная параметрическая псевдо-воксельная модель, в которой Δλ1=1, Δλ2=1, Δλ3=1. В этой модели каждой ЭОС сканируемой сцены соответствует один псевдо-воксель 1×1×1, отображаемый в памяти 38 в виде бита, расположенного в строго определенном месте АБИ, имеющего в памяти 38 строго определенный СПАБИ-адрес.
Непосредственно перед выполнением ВА1 и ВА2 нормализованная псевдо-воксельная модель содержимого сцены преобразуется в 3D геометрическую вексельную модель (см. п. 1.4.1). При выполнении этого преобразования каждый псевдо-воксель 1×1×1 замещается целым подмножеством геометрических вокселей 1×1×1 (имеющим яркость, совпадающую с яркостью исходного псевдо-вокселя 1×1×1), образующим вместе воксельную модель одной ЭОС пространства отсканированной сцены.
На фиг. 13 показаны варианты вышеписанных моделей на примере сканирующего дальномера 14. Здесь в качестве параметров выступают (фиг. 13-а): азимут (β), угол места (ε) и дальность  , выраженная в числе ЭОС, расположенных вдоль сканирующего луча от центра сканирования (Од) до сканируемой точки. В параметрической декартовой системе координат
, выраженная в числе ЭОС, расположенных вдоль сканирующего луча от центра сканирования (Од) до сканируемой точки. В параметрической декартовой системе координат  (фиг. 13-б) область сканирования дальномера 14 отображается в виде параллелепипеда
(фиг. 13-б) область сканирования дальномера 14 отображается в виде параллелепипеда  . В нормализованной псевдо-воксельной модели Δβ=1, Δε=1 и
. В нормализованной псевдо-воксельной модели Δβ=1, Δε=1 и  , а область сканирования дальномера 14 отображается в виде параллелепипеда
, а область сканирования дальномера 14 отображается в виде параллелепипеда  (фиг. 13-в), где:
(фиг. 13-в), где:
- Nβ = (βmax - βmin) / Δβ - максимальное число псевдо-вокселей 1×1×1 области сканирования дальномера 14 вдоль параметрической оси  (фиг. 13-в);
(фиг. 13-в);
- Nε = (εmax - εmin) / Δε - максимальное число псевдо-вокселей 1×1×1 области сканирования дальномера 14 вдоль параметрической оси  ;
;
-  - максимальное число ЭОС сканирования дальномера 14 вдоль параметрической оси
- максимальное число ЭОС сканирования дальномера 14 вдоль параметрической оси 
В евклидовом пространстве R3 каждый ЭОС дальномера 14 в зависимости от  имеет (в общем случае) свою толщину, ограничен 2-мя сферами (с одним центром сканирования) и 4-мя плоскостями (фиг. 13-в, д). Множество всех ЭОС дальномера 14, имеющих одно значение , образуют вместе сферическую ЭОС-оболочку сканируемой области дальномера 14 (фиг. 13-в, д).
имеет (в общем случае) свою толщину, ограничен 2-мя сферами (с одним центром сканирования) и 4-мя плоскостями (фиг. 13-в, д). Множество всех ЭОС дальномера 14, имеющих одно значение , образуют вместе сферическую ЭОС-оболочку сканируемой области дальномера 14 (фиг. 13-в, д).
На фиг. 14. показаны варианты вышеписанных моделей в случае использования стереокамеры 13. Здесь в качестве параметров выступают (фиг. 14-а):
nэ - номер эпиполярной строки стереокамеры 13;
nлев - номер пикселя в nэ-й эпиполярной строки, принадлежащего левому изображению стереопары;
nправ - номер пикселя в nэ-й эпиполярной строки, принадлежащего правому изображению стереопары.
Каждый слой ЭОС сканируемой области стереокамеры 13, состоящий из евклидовых моделей-многогранников ЭОС, пиксели-прообразы 1×1 которых лежат в nэ-й эпиполярной строке стереокамеры 13, назовем nэ-м эпиполярным ЭОС-слоем сканируемой области стереокамеры 13. (фиг. 14-б). ЭОС-слой, состоящий из математически точных геометрических моделей-многогранников, центры которых лежат в nк-й плоскости, параллельной картинной плоскости стереокамеры 13, будем называть nк-м картинным ЭОС-слоем сканируемой области стереокамеры 13.
Независимо от типа используемого видеодатчика 10 синтез воксельной геометрической модели содержимого наблюдаемой сцены осуществляется в заявленном устройстве следующим образом:
1) строится первое 3D-BCH, состоящее из параметрических псевдо-вокселей 1×1×1, яркость Ф1 которых определяется по результатам видеомониторинга сцены, а именно: если ЭОС, соответствующая данному псевдо-вокселю 1×1×1, отмечается видеодатчиком 10 как «препятствие», то у этого псевдо-вокселя Ф1=1; в противном случае - Ф1=0;
2) каждая ЭОС наблюдаемой сцены математически точно описывается способом, наиболее удобным для данного типа видеодатчика 10;
3) на основе первого 3D-БСИ и математически точного описания ЭОС строится второе 3D-БСИ, объединяющее вексельные модели всех ЭОС наблюдаемой сцены (где центры ЭОС и центры их вексельных моделей максимально совпадают) и состоящее из вокселей 1×1×1, чья яркость Ф2 определяется по принципу:
1) геометрический (евклидовый) воксель 1×1×1 имеет Ф2=1, если он принадлежит воксельной модели ЭОС, чей псевдо-воксель 1×1×1 имеет яркость Ф1=1;
2) геометрический (евклидовый) воксель 1×1×1 имеет Ф2=0, если он принадлежит воксельной модели ЭОС, чей псевдо-воксель 1×1×1 имеет яркость Ф1=0.
1.4. Вексельная АПТОС и ее основные компоненты
Преимущества воксельной АПТОС, применяемой в видеоанализаторах 8, наиболее полным образом проявляются при выполнении ВА1 и ВА2 (самых трудоемких и ответственных этапов УЦ AMP). Опишем основные компоненты этой технологии.
1.4.1. Геометрические вексельные модели объектов сцен
Определение 1.4.1-1. n-мерной сценой S формата  назовем семейство
назовем семейство  (где I=1, 2, 3, …, qS) точечных множеств Eq евклидового пространства Rn, удовлетворяющее выражению:
(где I=1, 2, 3, …, qS) точечных множеств Eq евклидового пространства Rn, удовлетворяющее выражению:  где μ(n)(Eq) - n-мерная мера множества Eq. Понятие n-мерной меры (n-мерного объема) μ(n)(E(n)) является естественным обобщением понятий: длины μ(1)(Е(1)) отрезка Е(1) - для R1; площади μ(2)(E(2)) плоской фигуры Е(2) - для R2; объема μ(3)(E(3)) 3D фигуры Е(3) - для R3.
где μ(n)(Eq) - n-мерная мера множества Eq. Понятие n-мерной меры (n-мерного объема) μ(n)(E(n)) является естественным обобщением понятий: длины μ(1)(Е(1)) отрезка Е(1) - для R1; площади μ(2)(E(2)) плоской фигуры Е(2) - для R2; объема μ(3)(E(3)) 3D фигуры Е(3) - для R3.
Абсолютную декартовую систему координат пространства R3 обозначим OaXaYaZa, а собственную декартовую систему координат сцены S обозначим OSXSYSZS.
Определение 1.4.1-2. Множество Eq ∈ S назовем q-м объектом n-мерной сцены S.
Разобьем пространство Rn на классы точечных множеств  (где
(где  , L=1, 2, 3, …, ∝), для которых одновременно справедливы выражения:
, L=1, 2, 3, …, ∝), для которых одновременно справедливы выражения:
1)  (где ρ(а,b) - расстояние между точками а и b множества
(где ρ(а,b) - расстояние между точками а и b множества  , ξp - постоянная);
, ξp - постоянная);
2)  ;
;
3)  ;
;
4)  .
.
Определение 1.4.1-3. Множества  , одновременно удовлетворяющие всем перечисленным требованиям, назовем n-мерным векселями ν(n)-вексельного разбиения Rn (или ν(n)-векселями), а ξp - постоянной этого разбиения. Двумерные воксели (ν(2)-воксели) будем называть пикселями.
, одновременно удовлетворяющие всем перечисленным требованиям, назовем n-мерным векселями ν(n)-вексельного разбиения Rn (или ν(n)-векселями), а ξp - постоянной этого разбиения. Двумерные воксели (ν(2)-воксели) будем называть пикселями.
Определение 1.4.1-4. Точечное множество  , составленное из конечного (Lk ⊂ L) числа вокселей
, составленное из конечного (Lk ⊂ L) числа вокселей  , назовем ν(n)-вексельным объектом.
, назовем ν(n)-вексельным объектом.
Определение 1.4.1-5. ν(n)-воксельной моделью множества  назовем ν(n)-воксельный объект
назовем ν(n)-воксельный объект  (где LE ⊂ L), составленный из всех вокселей
(где LE ⊂ L), составленный из всех вокселей  , для которых выполняется:
, для которых выполняется:  (где
(где  - постоянная
- постоянная  ).
).
ν(2)-воксельные модели будем называть пиксельными моделями.
Определение 1.4.1-6. Обобщенным объектом сцены  назовем объединение всех объектов сцены S, т.е. объект
назовем объединение всех объектов сцены S, т.е. объект  .
.
1.4.2. Дискретизирующие отображения, моделирующие геометрические преобразования над ν(n)-вексельными моделями объектов сцен
Определение 1.4.2-1. Сцену  формата F(n), для которой одновременно справедливы выражения:
формата F(n), для которой одновременно справедливы выражения:  ;
;  , назовем qS-нарным (или qS-уровневым) n-мерным изображением формата Каждое qS-нарное изображение формата может быть представлено qS-значной функцией Ф яркости, принимающей в каждой точке
, назовем qS-нарным (или qS-уровневым) n-мерным изображением формата Каждое qS-нарное изображение формата может быть представлено qS-значной функцией Ф яркости, принимающей в каждой точке  значение Ф(а), удовлетворяющее высказыванию:
значение Ф(а), удовлетворяющее высказыванию:

Определение 1.4.2-2. Вычислительную процедуру ƒν, осуществляющую синтез ν(n)-воксельной модели ƒν(E) ⊂ Rn множества ƒ(E) из множества Е, где ƒ(E) - образ множества E ⊂ Rn при отображении ƒ : E → ƒ(E), назовем ν(n)-дискретизирующим отображением ƒν, моделирующим отображение ƒ : E → ƒ(E), или просто дискретизирующим отображением (сокращенно ДО - фиг. 24).
Определение 1.4.2-3. Геометрическое преобразование ƒ : Rn → Rn, при котором образ любого ν(n)-вексельного объекта также является ν(n)-воксельным объектом, назовем ν(n)-дискретно-инвариантным геометрическим преобразованием (ДИГП).
Определение 1.4.2-4. ν(n)-дискретно-инвариантное геометрическое преобразование ƒ, при котором ƒ(F(n))=F(n), назовем собственным F(n)-форматным геометрическим преобразованием (СФГП).
Определение 1.4.2-5. n-мерное изображение, формат которого состоит из двух или более взаимно-непересекающихся фрагментов, конгруэнтных F(n), назовем F(n)-составным n-мерным изображением.
Все ОПОС по их влиянию на исходное ν(n)-воксельное разбиение пространства Rn можно разбить на 2 класса:
• класс ПАР, состоящий из ОПОС, выполнение которых не приводит к изменению первоначального ν(n)-воксельного разбиения Rn, благодаря чему допускается абсолютное их распараллеливание при обработке ν(n)-вексельных объектов (к данным ОПОС относятся: теоретико-множественные операции; процедуры анализа объектов на пересекаемость; определение n-мерной меры; определение линейных координат ν(n)-воксельной модели; некоторые виды симметрии; некоторые виды поворотов и параллельных переносов и др.);
• класс ПНР, состоящий из ОПОС, выполнение которых приводит к изменению первоначального ν(n)-воксельного разбиения Rn, благодаря чему абсолютное их распараллеливание при обработке ν(n)-вексельных объектов невозможно (к данным ОПОС относятся большинство геометрических преобразований, в том числе и аффинных).
В воксельной АПТОС для максимального распараллеливания процесса обработки содержимого сцены реализован следующий подход:
1) евклидовые пространства R2 и R3 разбиваются на квадратные пиксели 1×1 и кубические воксели 1×1×1 соответственно.
2) для каждого разбиения геометрические преобразования класса ПНР заменяются классом ПДО, состоящим из ДО, моделирующих с допустимой степенью точности соответствующие преобразования ПНР.
3) в качестве адресуемых F(2)-форматных и F(3)-форматных адресуемых бинарных изображений (АБИ) выбраны квадратный формат q3×q3 и кубический формат q2×q2×q2 соответственно.
4) из классов ПАР и ПДО выделяется, а затем аппаратно реализуется в воксельном вычислителе некий функционально-полный набор ОПОС (базис), выполняемых с абсолютной степенью параллелизации над произвольным содержимым (q3×q3)-форматных (2D-АБИ) и (q2×q2×q2)-форматных (2D-АБИ) адресуемых бинарных изображений..
1.4.3. Абсолютное распараллеливание дискретизирующего отображения
Общий принцип построения ν(n)-воксельной модели ƒν(E) множества ƒ(E) из объекта Е (где  - некоторый произвольный ν(n)-воксельный объект, а ƒ - биективное отображение ƒ : Rn → Rn) состоит в следующем.
- некоторый произвольный ν(n)-воксельный объект, а ƒ - биективное отображение ƒ : Rn → Rn) состоит в следующем.
Исходный (моделируемый) объект Е задается бинарным n-мерным изображением S1 некоторого формата  , где
, где  .
.
Результатом построения модели должно стать бинарное n-мерное изображение S2 некоторого формата  , содержащее внутри себя объект ƒν(E).
, содержащее внутри себя объект ƒν(E).
Пусть  , L1=L2=LF. Поскольку S1 и S2 являются бинарными, они могут быть представлены следующими двузначными функциями яркости векселя
, L1=L2=LF. Поскольку S1 и S2 являются бинарными, они могут быть представлены следующими двузначными функциями яркости векселя  , где
, где 

(где для F(n) можно принять  ;
;


(где для F(n) можно принять  ).
).
Построение ν(n)-воксельной модели образа ƒ(E) предполагает определение меры  для каждого
для каждого  . Из
. Из  следует:
следует:
 , отсюда
, отсюда  .
.
Так как  а ƒ является биективным отображением ƒ : Rn → Rn, то
а ƒ является биективным отображением ƒ : Rn → Rn, то  Отсюда согласно свойству аддитивности n-мерной меры вытекает:
Отсюда согласно свойству аддитивности n-мерной меры вытекает:

Используя введенную функцию  , для значений
, для значений  , удовлетворяющих условию
, удовлетворяющих условию  можно записать:
можно записать:



В состав устройства, предназначенного для выполнения ДО с предельной степенью параллелизации [5, 6, 7, 8, 9, 10, 11, 12], для каждого вокселя  выходного изображения S2, а также для каждого j-го ДО
выходного изображения S2, а также для каждого j-го ДО  , выполняемого в устройстве с максимальным распараллеливанием, вводится свой формирователь яркости вокселя
, выполняемого в устройстве с максимальным распараллеливанием, вводится свой формирователь яркости вокселя  . Выражения (1.5.3-1), (1.5.3-2) и (1.5.3-3) определяют зависимость выходного сигнала
. Выражения (1.5.3-1), (1.5.3-2) и (1.5.3-3) определяют зависимость выходного сигнала  этого
этого  от его входных сигналов
от его входных сигналов  .
.
1.5.2. Вексельный вычислитель
Вычислительным ядром видеоанализатора 8 является воксельный вычислитель (ВВ) - один из вариантов т.н. устройств параллельной обработки n-мерных воксельных моделей (УПОnВМ) [13, 14], команды которых оперируют как адресуемыми двоичными числами (1D-АБИ), так и n-мерными адресуемыми бинарными изображениями формата F(n) (nD-АБИ). В заявленном устройстве воксельный вычислитель образуют блок 15 и блок 16 видеанализатора 8.
Система команд воксельного вычислителя оперирует:
1) F(3)-форматными 3D-АБИ, у которых F(3) имеет форму куба q2×q2×q2 и состоит из взаимно-непересекающихся кубиков-вокселей 1×1×1 (где q≥2 - число целое);
2) F(2)-форматными 2D-АБИ, у которых F(2) имеет форму квадрата q3×q3 и состоит из взаимно-непересекающихся квадратиков-пикселей 1×1.
Оба формата АБИ имеют одинаковое число (q6) пикселей и вокселей, что позволяет использовать одни и те же вычислительные ресурсы ВВ для высокоскоростной обработки БСИ обеих размерностей. Подробно принцип функционирования ВВ, варианты архитектур ВВ и их системы команд описаны в [10, 11, 12]. Главным вычислительным компонентом ВВ является однородная процессорная матрица 20 формата q2×q2×q2, состоящая из q6 одноразрядных типовых процессоров 30 (фиг. 6) и большого числа межпроцессорных связей, реализующих ДО с высокой степенью параллелизации над одноцветным содержимым 2D-АБИ и 3D-АБИ.
Процессорная матрица 20 формата q2×q2×q2 состоит из однотипных одноразрядных процессоров и структурно разбита на процессорные строки формата q×1×1 (фиг. 7), процессорные слои формата q2×q2×1 и фрагменты формата q2×q2×q. В действующем макете ВВ, изготовленном авторами данного устройства, из всех ДО, моделирующих сдвиг и поворот, аппаратно реализованы:
- 2 параллельных сдвига одноцветного содержимого АБИ, выполняемых вдоль строки q×1×1: на 1 шаг и q шагов в одном направлении;
- 3 высокопараллельных дискретно-инвариантных поворота АБИ на 90° вокруг 3-х центральных осей матрицы 20.
Как и в прототипе, по способу заполнения освободившихся элементов сдвигаемых строк q×1×1 указанные сдвиги выполняется в 3-х модификациях: с заранее заданным заполнением, с заполнением из буферной памяти 19, с циклическим сдвигом.
1.5.3. Методы обработки графической информации в воксельном вычислителе
1.5.3.1. Воксельные модели низкого, среднего и высокого разрешения, особенности их представления и обработки в ВВ
Максимальное распараллеливание ОПОС достигается в ВВ при обработке АБИ, имеющих форматы q2×q2×q2 и q2×q3. Однако число вокселей 1×1×1 (или пикселей 1×1), входящих в АБИ, ограничено возможностями элементной базы матрицы 20 (стоимостью, числом, площадью применяемых кристаллов, плотностью размещения электронных компонентов на кристалле и т.п.) и не может в настоящее время превышать сотен тысяч вокселей (пикселей). В то же время минимально-допустимое разрешение реальных 2D и 3D сцен, достаточное для успешного решения задач навигации AMP, значительно превышает это число. В воксельном вычислителе 2D и 3D изображения такого высокого разрешения представляются несколькими АБИ-фрагментами и обрабатываются в ВВ программно.
Двумерным бинарным составным изображением (2D-БСИ) будем называть 2D бинарное изображение, формат которого образован объединением нескольких взаимно непересекающихся АБИ-фрагментов q3×q3. Трехмерным бинарным составным изображением (3D-БСИ) будем называть 3D бинарное изображение, формат которого образован объединением нескольких взаимно непересекающихся адресуемых АБИ-фрагментов q2×q2×q2. Если АБИ в ВВ обрабатываются с максимальной степенью параллелизации (близкой к абсолютной), то БСИ обрабатываются в ВВ последовательно (АБИ-фрагмент за АБИ-фрагментом).
Если обработка БСИ осуществляется только в матрице 20 и только АБИ-фрагментами, то хранение БСИ в видеоанализаторе 8 может осуществляться с использованием:
- сверхоперативной RAM-памяти 38 (состоящей из одноразрядных узлов 30), оперирующей (q2×q2×q2)-форматными и (q3×q3)-форматными АБИ;
- оперативной RAM-памяти 38, оперирующей адресуемыми (q2×q2×q)-форматными фрагментами АБИ;
Вексельную (пиксельную) модель, представляемую в ВВ виде одноцветного содержимого бинарного изображения формата, не превышающего q2×q2×q2 (q3×q3), назовем воксельной (пиксельной) моделью низкого разрешения. В ВВ информационная емкость произвольно наращиваемой памяти 20 многократно превышает информационную емкость ненаращиваемой памяти 34. В этой связи вексельную модель, представляемую в виде одноцветного содержимого БСИ, полностью размещающегося в памяти 38, назовем воксельной моделью среднего разрешения. А воксельную модель, представляемую в ВВ в виде одноцветного содержимого БСИ, полностью размещающегося в памяти 22, назовем воксельной моделью высокого разрешения.
Полутоновые и цветные изображения высокого разрешения представляются в ВВ в виде нескольких БСИ того же разрешения и формата. При этом каждый i-й n-мерный воксель j-го БСИ должен иметь значение (0 или 1), равное значению j-го разряда двоичного кода яркости, принадлежащего i-му n-мерному вокселю полутонового составного изображения.
Методы воксельной АПТОС, используемые при обработке графической информации и видеоинформации описаны в работах [5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15].
1.5.3.2. Расшивка и сшивание содержимого БСИ
Аппаратное моделирование ДНИГП в преобразователях 22 над одноцветным содержимым АБИ производится с учетом формы, габаритов и разрешения формата АБИ. В результате моделирование ДНИГП над одноцветным содержимым БСИ должно осуществляться в ВВ в 3 этапа: 1) сначала содержимое БСИ расшивается на отдельные части, центры которых совпадают с центрами АБИ-фрагментов расшитого БСИ; 2) затем в преобразователе 22 моделируется ДНИГП над содержимым каждого АБИ расшитого БСИ; 3) преобразованное содержимое каждого АБИ расшитого БСИ сшивается (при необходимости) в новое БСИ.
Продемонстрируем выполнение двух указанных процедур на примере поворота одноцветного содержимого 3D-БСИ формата 81×9×81 вокруг оси, проходящей через центр Оα этого 3D-БСИ параллельно оси ОиYи (фиг. 26-а), с использованием процессорной матрицы 9×9×9. Данный пример реализован в действующем макете ВВ, разработанном, изготовленном и испытанном авторами данного устройства.
Сначала определяются основные параметры расшивки содержимого 3D-БСИ. Поскольку расшивка планируется для моделирования поворотов содержимого 3D-БСИ на углы α из диапазона 0°<α<360°, то значение В центральной части B×9×B АБИ-фрагмента 9×9×9, поворачиваемой без выхода за пределы АБИ-фрагмента, будет равняться  . Округление значения B в сторону увеличения позволяет избежать потерь данных при сшивании (пустот). При этом искажения, вызванные небольшим перекрытием накладываемых друг на друга повернутых АБИ-фрагментов 7×9×7, на этапе сшивания повернутых фрагментов 7×9×7 являются минимальными. Округление значения B в сторону уменьшения (до 6) привело бы к потере данных на больших углах поворота. В случае В=А=9 искажения, вызванные наложением повернутых АБИ-фрагментов, будут максимальными.
. Округление значения B в сторону увеличения позволяет избежать потерь данных при сшивании (пустот). При этом искажения, вызванные небольшим перекрытием накладываемых друг на друга повернутых АБИ-фрагментов 7×9×7, на этапе сшивания повернутых фрагментов 7×9×7 являются минимальными. Округление значения B в сторону уменьшения (до 6) привело бы к потере данных на больших углах поворота. В случае В=А=9 искажения, вызванные наложением повернутых АБИ-фрагментов, будут максимальными.
В BB расшивку наиболее просто и быстро осуществлять вдоль взаимно-ортогональных направлений (в нашем случае: в направлении  и
и  ). Результат расшивки исходного 3D-БСИ формата 81×9×81 (фиг. 26-а) по
). Результат расшивки исходного 3D-БСИ формата 81×9×81 (фиг. 26-а) по  показан на фиг. 26 (б). Результат расшивки по
показан на фиг. 26 (б). Результат расшивки по  показан на фиг. 27-а. После расшивки каждый из 169 фрагментов 7×9×7, расположенных в центре 169 фрагментов 9×9×9 расшитого БИ формата 117×9×117 (фиг. 27-а), последовательно поворачиваются на угол α вокруг центра собственного АБИ. После поворота повернутый фрагмент устанавливается в СПАБИ по адресам, соответствующим результирующему (повернутому) 3D-БСИ методом, описанным в п. 3.7.3. На фиг. 26-б показан результат поворота на угол α с последующим сшиванием 4-х соседних фрагментов 7×9×7. Алгоритм расчета СПИ-адресов для установки каждого повернутого фрагмента 9×9×9 расшитого БИ формата 117×9×117 в результирующее 3D-БСИ показан на фиг. 28.
показан на фиг. 27-а. После расшивки каждый из 169 фрагментов 7×9×7, расположенных в центре 169 фрагментов 9×9×9 расшитого БИ формата 117×9×117 (фиг. 27-а), последовательно поворачиваются на угол α вокруг центра собственного АБИ. После поворота повернутый фрагмент устанавливается в СПАБИ по адресам, соответствующим результирующему (повернутому) 3D-БСИ методом, описанным в п. 3.7.3. На фиг. 26-б показан результат поворота на угол α с последующим сшиванием 4-х соседних фрагментов 7×9×7. Алгоритм расчета СПИ-адресов для установки каждого повернутого фрагмента 9×9×9 расшитого БИ формата 117×9×117 в результирующее 3D-БСИ показан на фиг. 28.
Данная расшивка является оптимальной, т.к. центры поворачиваемых фрагментов 7×9×7 расположены абсолютно симметрично относительно центра всего расшитого изображения 117×9×117, а B=7 обеспечивает при сшивании повернутых фрагментов 7×9×7 минимально возможные искажения 3D-БСИ. Наличие симметрии позволяет сократить число вычислений координат центров повернутых фрагментов вокруг центральной оси, проходящей через центр Оα 3D-БСИ 81×81×81 параллельно ОиYи, в 4 раза (по числу поворачиваемых квадрантов 3D-БСИ). Использование же симметричного способа расшивки при повороте 3D-БСИ формата 81×81×81 на произвольный 3D угол вокруг центра этого 3D-БСИ дает выигрыш при расчете координат центров поворачиваемых фрагментов 6×6×6 уже в 8 раз (по числу поворачиваемых октантов 3D-БСИ).
1.6. Метод ВЗС и его реализация на базе воксельной АПТОС
Определение 2. Сценой Р, зондирующей сцену S в точке g, назовем сцену формата  (фиг. 30-б), у которой геометрическая форма обобщенного объекта EP и положение центра OP системы координат этой сцены (например, OPXPYPZP для n=3) удовлетворяют условиям
(фиг. 30-б), у которой геометрическая форма обобщенного объекта EP и положение центра OP системы координат этой сцены (например, OPXPYPZP для n=3) удовлетворяют условиям  и
и  , где ƒ(EP) - образ EP при повороте ƒ вокруг центра OP на произвольный пространственный угол [15].
, где ƒ(EP) - образ EP при повороте ƒ вокруг центра OP на произвольный пространственный угол [15].
Определение 3. Зондом исследуемой сцены S назовем обобщенный объект EP сцены P, зондирующей сцену S.
Определение 4. Виртуальным зондированием сцены S зондирующей сценой P назовем вычислительную процедуру, заключающуюся в последовательном выполнении одного или нескольких элементарных актов зондирования (ЭАЗ). Каждый m-й ЭАЗ (где m - номер текущего акта зондирования) состоит (в общем случае) из трех последовательно выполняемых операций:
1) поворота EP → ƒm(EP) зонда EP вокруг центра OP (фиг. 30-в) на m-й n-мерный пространственный угол внутри зондирующей сцены P;
2) параллельного переноса cm зондирущей сцены P, содержащей зонд ƒm(EP), внутрь зондируемой сцены  в точку m-го центра зондирования
в точку m-го центра зондирования  так, чтобы новый центр cm(OP) совпал с точкой gm исследуемой сцены S (фиг. 30-г). После выполнения переноса между точками множеств
так, чтобы новый центр cm(OP) совпал с точкой gm исследуемой сцены S (фиг. 30-г). После выполнения переноса между точками множеств  и
и  будет установлено взаимнооднозначное соответствие;
будет установлено взаимнооднозначное соответствие;
3) вычисления значения некоторой функции зондирования Pm по отношению к сцене S и зонду cm(ƒm(EP)), расположенному в точке gm зондируемой сцены S.
Физический смысл ВЗС, виртуального зонда EP, виртуальной сцены S, функции зондирования Pm и точечного множества  (образованного всеми центрами зондирования сцены S) зависит от характера решаемой прикладной задачи. Так в задачах поиска обхода препятствий мобильным роботом виртуальный зонд EP выступает в качестве геометрической модели робота, а объект ES - в качестве геометрической модели обобщенного объекта-препятствия сцены S, внутри которой предполагается организовать маршрут движения робота. Множество G (траектория зондирования), в этом случае, представляет собой непрерывную линию, которая воспроизводит траекторию движения AMP, проходящую внутри
(образованного всеми центрами зондирования сцены S) зависит от характера решаемой прикладной задачи. Так в задачах поиска обхода препятствий мобильным роботом виртуальный зонд EP выступает в качестве геометрической модели робота, а объект ES - в качестве геометрической модели обобщенного объекта-препятствия сцены S, внутри которой предполагается организовать маршрут движения робота. Множество G (траектория зондирования), в этом случае, представляет собой непрерывную линию, которая воспроизводит траекторию движения AMP, проходящую внутри  и у которой соседние центры зондирования расположены бесконечно близко друг к другу.
и у которой соседние центры зондирования расположены бесконечно близко друг к другу.
При решении задач обхода препятствий каждый ЭАЗ служит для выявления факта пересечения (т.е. столкновения) зонда cm(ƒm(EP)) с препятствием ES. Для этого выполняется теоретико-множественная операция  . Если функция Pm, представляющая собой предикат
. Если функция Pm, представляющая собой предикат  (где Mm - предметная переменная), истинна, зонд cm(ƒm(EP)) и объект-препятствие ES объявляются виртуально нестолкнувшимися. Если Pm ложно, зонд cm(ƒm(EP)) и препятствие ES сцены объявляются виртуально столкнувшимися.
(где Mm - предметная переменная), истинна, зонд cm(ƒm(EP)) и объект-препятствие ES объявляются виртуально нестолкнувшимися. Если Pm ложно, зонд cm(ƒm(EP)) и препятствие ES сцены объявляются виртуально столкнувшимися.
При решении задач распознавания виртуальный зонд EP выполняет уже роль n-мерного геометрического эталона распознаваемого объекта. Исследуемая  -форматная сцена выступает в качестве исследуемого n-мерного изображения, внутри которого ищется заданный распознаваемый n-мерный объект. Здесь виртуальное зондирование служит для выявления факта наличия (или отсутствия) совпадения геометрических свойств эталона с соответствующими признаками некоторого участка анализируемой сцены, а также для определения местоположения этого совпадения на исследуемой сцене. В идеале, область G состоит из бесконечного числа центров зондирования, но порядок зондирования в данном случае принципиально несущественен. В этом случае функция зондирования Pm, по значению которой определяется факт совпадения геометрических характеристик, здесь не ограничивается только анализом cm(ƒm(EP)) и ES на их пересекаемость, но также включает в себя вычисление n-мерного объема множества
-форматная сцена выступает в качестве исследуемого n-мерного изображения, внутри которого ищется заданный распознаваемый n-мерный объект. Здесь виртуальное зондирование служит для выявления факта наличия (или отсутствия) совпадения геометрических свойств эталона с соответствующими признаками некоторого участка анализируемой сцены, а также для определения местоположения этого совпадения на исследуемой сцене. В идеале, область G состоит из бесконечного числа центров зондирования, но порядок зондирования в данном случае принципиально несущественен. В этом случае функция зондирования Pm, по значению которой определяется факт совпадения геометрических характеристик, здесь не ограничивается только анализом cm(ƒm(EP)) и ES на их пересекаемость, но также включает в себя вычисление n-мерного объема множества  .
.
Вышеописанная процедура ВЗС - это лишь ее идеальная версия, оперирующая бесконечными точечными множествами пространства Rn, где виртуальный зонд перемещается вдоль непрерывной траектории зондирования, состоящей из бесконечного числа центров зондирования, а соседние центры зондирования удалены друг от друга на бесконечно малые расстояния. Такая идеальная версия дает только общее (концептуальное) представление о процедуре ВЗС. Однако она не может быть реализована с помощью программируемого вычислителя (ПВ). Чтобы реализовать ВЗС с помощью ПВ, описанная идеальная версия ВЗС должна быть модифицирована, а именно:
- точечные множества ES и EP должны быть представлены в ПВ в виде машинных геометрических моделей, представленных в памяти ПВ в виде упорядоченного массива адресуемых информационных единиц;
- бесконечное множество G центров зондирования заменено дискретной траекторией зондирования (ДТЗ), состоящей из конечного числа центров зондирования (g0, g1, g2, …, gm, gm+1, … gk)
Эффективность метода ВЗС определяется скоростью рекогнисцировочного перемещения виртуального зонда (например, геометрической модели AMP) внутри виртуального пространства исследуемой сцены, а также скоростью вычисления функции зондирования Pm.
От скорости анализа окружающей сцены зависит время принятия AMP решений на переключение его исполнительных органов (сервоприводов, реле и т.п.). Для увеличения скорости и качества реагирования AMP на внешние раздражители необходимо стремиться к предельному сокращению времени анализа сцены. Достичь этого можно путем повышения тактовой частоты управления ПВ или путем глубокого распараллеливания вычислительных процедур, наиболее часто используемых при ВЗС. В предлагаемом методе ВЗС высокую скорость зондирования сцены предполагается достичь с помощью второго пути.
Скорость выполнения ВЗС в ПВ зависит от:
а) точности применяемых геометрических моделей ES и EP;
б) числа центров зондирования, образующих множество G;
в) времени выполнения каждого ЭАЗ в применяемом ПВ;
д) качества выбора траекторий-гипотез для проведения эвристических разведовательных перемещений зонда внутри зондируемой сцены.
Из всех перечисленных факторов наибольшее влияние на быстродействие ВЗС оказывает скорость выполнения ЭАЗ. Простейшая версия ЭАЗ включает:
1) поворот EP → ƒm(EP);
2) параллельный перенос ƒm(ЕР) → cm(ƒm(ЕР));
3) чтение из памяти ПВ зондируемого участка ZS ⊂ ES, для которого выполняется  ;
;
4) вычисление значения предиката 
В этой связи для достижения максимальной адаптивности AMP время выполнения указанных операций должно быть минимально возможным.
Учитывая, что n-мерный объем и габариты зонда cm(ƒm(EP)) значительно уступают объему и габаритам  , процесс чтения должен затрагивать (по возможности) не все адресное пространство, где хранится полное описание ES, а только ту его часть, внутри которой гарантированно находится описание ZS. Чтобы реализовать это, отдельные непересекаемые участки зондируемого пространства сцены
, процесс чтения должен затрагивать (по возможности) не все адресное пространство, где хранится полное описание ES, а только ту его часть, внутри которой гарантированно находится описание ZS. Чтобы реализовать это, отдельные непересекаемые участки зондируемого пространства сцены  и адресное пространство памяти ПВ, где хранится геометрическое описание содержимого этих участков сцены, должны иметь сильную взаимную коррелляцию. При использовании воксельной АПТОС это условие легко выполняется.
и адресное пространство памяти ПВ, где хранится геометрическое описание содержимого этих участков сцены, должны иметь сильную взаимную коррелляцию. При использовании воксельной АПТОС это условие легко выполняется.
Еще в большей степени (чем на этапе чтения ZS) от выбора АПТОС зависит время выполнения функции зондирования. В традиционных видах АПТОС, основанных на методах аналитической геометрии и линейной алгебры, время анализа на пересекаемость зонда и сцены при исследовании сложных геометрических сцен многократно превышает время, затрачиваемое на чтение ZS. В случае использования воксельной АПТОС этап вычисления функции зондирования крайне мал и сравним с общим временем извлечения АБИ из памяти СПАБИ воксельного вычислителя (независимо от геометрической сложности исследуемой сцены).
Уменьшение числа центров зондирования, снижение степени точности машинного представления ES и EP в ПВ сокращают время выполнения ВЗС, но увеличивают погрешность найденных решений. Для повышения эффективности зондирования сцены целесообразно использовать многоступенчатый алгоритм выполнения ВЗС, когда на начальных этапах ищутся только самые быстрые и грубые решения с использованием моделей ES и EP низкого разрешения. После чего найденные траектории-гипотезы уточняются (или отбраковываются) путем их повторного зондирования с применением геометрических моделей ES и EP более высокого разрешения.
1.7. Точность представления геометрии зонда и содержимого зондируемой сцены в устройстве
Геометрия зонда (EP) может обладать бесконечно большим числом возможных вариаций (от EP=∅ до  ). Отобразить в памяти ПВ все это бесконечное разнообразие содержимого сцены Р посредством конечного числа двоичных накопителей можно только при условии, если каждая точка
). Отобразить в памяти ПВ все это бесконечное разнообразие содержимого сцены Р посредством конечного числа двоичных накопителей можно только при условии, если каждая точка  будет отображаться в ПВ с некоторой ненулевой погрешностью локализации (выражаемой, например, в виде значения объема Δν=Δx⋅Δy⋅Δz области, в которой может находиться точка a, где Δx - погрешность локализации точки а по оси Ох, Δy - погрешность локализации точки по оси Oy, Δz - погрешность локализации точки по оси Oz). Пусть зонд EP является полностью искусственным объектом, у которого погрешности Δx=Δy=Δz=1. При машинном выполнении ВЗС на базе воксельной АПТОС условимся, что все параллельные переносы EP внутри зондируемой сцены S, моделируемой вокселями 1×1×1, осуществляются на векторы смещения с целочисленными координатами, кратными Δx=Δy=Δz=1.
будет отображаться в ПВ с некоторой ненулевой погрешностью локализации (выражаемой, например, в виде значения объема Δν=Δx⋅Δy⋅Δz области, в которой может находиться точка a, где Δx - погрешность локализации точки а по оси Ох, Δy - погрешность локализации точки по оси Oy, Δz - погрешность локализации точки по оси Oz). Пусть зонд EP является полностью искусственным объектом, у которого погрешности Δx=Δy=Δz=1. При машинном выполнении ВЗС на базе воксельной АПТОС условимся, что все параллельные переносы EP внутри зондируемой сцены S, моделируемой вокселями 1×1×1, осуществляются на векторы смещения с целочисленными координатами, кратными Δx=Δy=Δz=1.
Геометрия содержимого зондируемой сцены (ES) также может отличаться бесконечно большим разнообразием (от ES=∅ до  ). Представить в памяти ПВ все это бесконечное разнообразие форм и габаритов ES посредством конечного числа двоичных накопителей можно только при условии, если каждая точка
). Представить в памяти ПВ все это бесконечное разнообразие форм и габаритов ES посредством конечного числа двоичных накопителей можно только при условии, если каждая точка  будет отображаться в ПВ с некоторой ненулевой погрешностью локализации (выражаемой, например, в виде значения Δν n-мерного объема области сцены, где может находиться точка).
будет отображаться в ПВ с некоторой ненулевой погрешностью локализации (выражаемой, например, в виде значения Δν n-мерного объема области сцены, где может находиться точка).
Важной особенностью 3D сцен, исследуемых в задачах технического зрения и синтезированных на основе видеоданных, является то, что погрешность локализации точки в области сканирования видеодатчика из-за наличия ЭОС может многократно превышать погрешность Δν. Разобьем  и ES на взаимно-непересекаемые ЭОС, обладающие своей характерной геометрической формой, пространственным положением и объемом. Присвоим каждой такой ЭОС, одновременно относящейся и к
и ES на взаимно-непересекаемые ЭОС, обладающие своей характерной геометрической формой, пространственным положением и объемом. Присвоим каждой такой ЭОС, одновременно относящейся и к  , и к ES, яркость, равную 1, а ЭОС, принадлежащей только к
, и к ES, яркость, равную 1, а ЭОС, принадлежащей только к  , - яркость 0. Тогда геометрия любого зондируемого объекта ES, синтезированного средствами технического зрения, может быть представлена некоторым n-мерным бинарным изображением формата
, - яркость 0. Тогда геометрия любого зондируемого объекта ES, синтезированного средствами технического зрения, может быть представлена некоторым n-мерным бинарным изображением формата  , при условии, что геометрия и пространственное положение всех ЭОС множества
, при условии, что геометрия и пространственное положение всех ЭОС множества  известны. При такой интерпретации исследуемой сцены наиболее перспективной для проведения ВЗС будет та, которая обеспечивает наибольшую скорость виртуального зондирования наиболее геометрически сложных ES, составленных из ЭОС. В качестве критерия геометрической сложности ES, состоящей из ЭОС, можно принять число ее поверхностных ЭОС (т.е. ЭОС, которые сами принадлежат ES, а их соседние ЭОС, входящие в
известны. При такой интерпретации исследуемой сцены наиболее перспективной для проведения ВЗС будет та, которая обеспечивает наибольшую скорость виртуального зондирования наиболее геометрически сложных ES, составленных из ЭОС. В качестве критерия геометрической сложности ES, состоящей из ЭОС, можно принять число ее поверхностных ЭОС (т.е. ЭОС, которые сами принадлежат ES, а их соседние ЭОС, входящие в  , уже не принадлежат ES). У зондируемой ES, обладающей предельно сложной геометрической формой (или близкой к таковой), число ее ЭОС будет приближаться к половине всех ЭОС, входящих в
, уже не принадлежат ES). У зондируемой ES, обладающей предельно сложной геометрической формой (или близкой к таковой), число ее ЭОС будет приближаться к половине всех ЭОС, входящих в  .
.
1.8. Виды виртуальных зондов и траекторий зондирования, применяемые в устройстве
При применении метода ВЗС на базе воксельной технологии могут использоваться следующие виды зондов и траекторий зондирования:
1) двумерные модели зондов, состоящие из взаимно-непересекающихся пикселей 1×1 и представленные в ВВ в виде множества всех единичных пикселей 1×1, входящих в состав 2D-АБИ ВВ или в виде совокупности всех единичных пикселей 1×1, входящих в состав 2D-БСИ различного формата;
2) трехмерные модели зондов, состоящие из вокселей 1×1×1 и представленные в ВВ в виде совокупности всех единичных вокселей 1×1×1, входящих в 3D-АБИ ВВ или в 3D-БСИ различных форматов;
3) плоские траектории виртуального зондирования, состоящие из конечного числа точек зондирования (gm) и изображаемые для удобства демонстрации направления зондирования в виде направленных отрезков, имеющих длину 1 и расположенных параллельно взаимно-ортогональным осям OSXS и OSYS зондируемой пиксельной модели сцены (направление отрезков отображает последовательность зондирования пиксельной модели сцены);
4) трехмерные траектории виртуального зондирования, состоящие из конечного числа точек зондирования (gm) и изображаемые для удобства демонстрации направления зондирования в виде направленных отрезков, имеющих длину 1 и расположенных параллельно вдоль взаимно-ортогональных осей OSXS, OSYS и OSZS зондируемой воксельной модели сцены.
При распознавании одного и того же 3D объекта-ориентира могут использоваться различные виртуальные зонды, отличающиеся геометрической формой, размерностью и своей внутренней топологией. Можно выделить следующие виды зондов [15]:
1) сплошные 3D зонды, одновременно состоящие из поверхностных и внутренних вокселей, окруженных со всех сторон вокселями, принадлежащими данному зонду;
2) оболочечные 3D зонды, состоящие из поверхностных вокселей своего сплошного 3D прототипа;
3) ракурсные 3D зонды (фиг. 16-а), состоящие только из поверхностных вокселей своего сплошного прототипа, видимых на своем сплошном прототипе только с определенного ракурса (угла зрения);
4) сплошные 2D зонды, представляющие собой параллельные проекции (силуэты) своего сплошного 3D прототипа на определенным образом ориентированную плоскость;
5) контурные 2D зонды, состоящие только из контурных пикселей своего сплошного 2D прототипа;
7) ракурсные 2D зонды, состоящие только из контурных пикселей своего сплошного 2D прототипа, видимых на своем сплошном 2D прототипе только с определенного ракурса (угла зрения);
6) мультиплицированные (составные) контурные 2D зонды формата 2D-АБИ, составленные из одинаковых или разных контурных 2D зондов.
Кинематические схемы некоторых AMP (например, летающих, подводных и космических AMP) позволяют перемещаться AMP в любом из направлений 3D пространства. В то же время при использовании воксельной АПТОС и n=3 вексельная модель зонда (ВМЗ) внутри зондируемой воксельной модели сцены (ВМС) может перемещаться только в 6-и взаимно-ортогональных направлениях (параллельно осям OSXS, OSYS, OSZS - фиг. ) и только на расстояния, имеющие целочисленные значения. Поэтому реальные прямолинейные траектории AMP могут моделироваться в воксельном пространстве ВМС в общем случае только приближенно: с помощью т.н. псевдопрямых - криволинейных траекторий, состоящих из взаимно-ортогональных участков с целочисленными длинами.
Разобьем все бесконечное множество 3D прямолинейных лучей, выходящих из центра О сферы (фиг. 17-а, б), на 48 бесконечных подмножеств лучей, соответствующих сегментам ССП0…ССП47 (фиг. 17-в, г, д, е), через которые проходят лучи данных подмножеств. Наиболее удобными при работе в виртуальных пространствах ВВ являются т.н. циклические псевдопрямые, состоящие из типовых периодически повторяющихся (циклических) участков. Выберем для каждого j-го подмножества прямолинейных лучей, проходящего через ССПj (где j=0…47), конечное число циклических псевдопрямых, представляющих данное подмножество лучей и переходящих друг в друга от сегмента к сегменту при выполнении суперпозиций геометрических преобразований, состоящих либо из ортогональных поворотов (на углы кратные 90°) вокруг осей Ox, Oy, Oz (фиг. 17-а), либо из преобразований симметрии относительно плоскостей Oxy, Oxz, Oyz. Выбранное множество образует спектр циклических псевдопрямых (СЦП). Условимся в качестве траекторий зондирования, моделирующих прямолинейные траектории, выбирать только псевдопрямые, входящие в указанный СЦП.
2. Работа устройства
2.1. Установка устройства в исходное состояние и переход в режим автономного функционирования AMP
Число, тип и местоположение видеодатчиков 10 на борту AMP определяются конкретной прикладной робототехнической задачей, стоящей перед AMP (фиг. 3). Каждый из видеодатчиков 12, 13 и 14 через подвижные сервоприводы 11 крепится на плоской опорной площадке, входящей в состав видеоплатформы 9 и являющейся, в общем случае, подвижной относительно корпуса видеоплатформы 9, которая закреплена на борту AMP неподвижно (фиг. 4). При решении задач локальной и персональной навигации положение объектов, расположенных внутри наблюдаемой сцены S, может быть охарактеризовано с помощью 3-х линейных и 3-х угловых координат в следующих декартовых системах координат (фиг. 3, 4, 5):
- в мировой (абсолютной или географической) системе координат (OMXMYMZM), где OM - выбранный географический центр мира, ось OMXM - направление азимута «0°», ось OMYM - направление азимута «90°», ось OMZM - направление зенита;
- в системе координат (ORXRYRZR) робота (где OR - выбранный центр AMP, ось ORXR - ось вращения AMP по углу крена, ось ORZR - ось вращения AMP по углу рыскания, ось ORYR - ось вращения AMP по углу тангажа);
- в системе координат (ODiXDiYDiZDi) датчика Di (где ODi - оптический центр датчика Di, ось ODiXDi совпадает с оптической осью датчика Di, а оси ODiYDi и ODiZDi параллельны взаимно-ортогальным сторонам прямоугольного растра датчика Di);
- в системе координат (OSXSYSZS) сцены (где OS - выбранный центр наблюдаемой сцены, OSXS - ось параллельная OMXM, OSZS - ось параллельная OMZM, OSYS - ось параллельная OMYM);
Пусть угловое положение видеодатчика Di относительно системы координат OPXPYPZP платформы 9 задается 3-мя сервоприводами (где OP - центр опорной площадки). Первый сервопривод вращает Di на угол εPDi вокруг OPYP; второй - на угол αPDi вокруг OPZP; третий - на угол γDi вокруг собственной оси видеодатчика (фиг. 4). Для упрощения описания принципа работы устройства примем, что опорные площадки всех видеоплатформ 9 робота гиростабилизированы, то есть:
- направление оси OPXP (фиг. 4) совпадает с направлением оси OMXM;
- направление оси OPYP совпадет с OMYM;
- направление оси OPZP совпадет с направлением OMZM;
- угол εPDi совпадет с географическим углом места (εDi) оси видеодатчика;
- угол αPDi совпадет с географическим азимутом (αDi) оси видеодатчика.
Выполнение этого условия обеспечит максимальную точность построения воксельной модели сцены и максимальную точность ее анализа видеоанализатором 8 (т.к. погрешность моделирования произвольного поворота с помощью последовательности ДО в блоке 16 резко возрастает с ростом числа ДО, входящих в эту последовательность). Безусловно, что для достижения максимальной точности воксельной модели содержимого сцены достаточно иметь на борту AMP всего лишь одну гиростабилизированную платформу. Но в этом случае для вычисления мировых координат εDi, αDi, γDi каждого видеодатчика 10i еще до синтеза воксельной модели содержимого сцены в блоке 16 (чтобы сохранить максимальную точность синтезируемой модели) потребуется подробное знание конструкции конкретного AMP и условий крепления видеоплатформ 9 (относительно этой гиростабилизированной платформы) на корпусе AMP.
Перед автономным функционированием AMP в память контроллера 1 с помощью программатора 4 загружается программа функционирования AMP (включая подпрограммы высокоскоростного построения БСИ, содержащих вексельные модели виртуальных зондов, средствами видеоанализаторов 8). В блок 3 загружаются мировые координаты (угловые и линейные) начальной точки маршрута AMP. При необходимости эта программа может быть приостановлена, изменена (например, в ходе радиобмена с центром управления автономной мультиагентной системы) и вновь перезапущена.
2.2. Общий алгоритм работы устройства
После подачи внешнего сигнала «Старт» (на соответствующий вход контроллера 1) устройство переходит в режим автономного функционирования AMP. Блок 3 переводится в режим слежения за текущими координатами AMP. В память контроллера 7 из контроллера 1 загружаются мировые координаты 1-го объекта-ориентира, а в видеоанализаторах 8 синтезируются БСИ, содержащие вексельную модель этого объекта-ориентира. Каждый видеодатчик 10 позиционируется относительно OMXMYMZM. Поскольку видеоплатформы 9 гиростабилизированы, поворот каждого видеодатчика 10i на углы γDi, εDi, αDi осуществляется контроллером 7 путем подачи соответствующих сигналов на входы сервоприводов 11i. Пространственная ориентация видеодатчика 10i считается завершенной, если сигналы рассогласования на выходах всех трех сервоприводов 11i платформы 9i, поступающие в контроллер 7, принимают нулевое значение.
Видеодатчики 10 по завершению их ориентации переводятся в режим сканирования окружающего пространства, а каждый видеоанализатор 8 переходит в один из режимов (РНВА=2, 3, 4) ввода результатов сканирования. Затем введенное 2D изображение (при вводе с видеокамер 12) или 3D изображение (при вводе со сканирующего дальномера 14) фильтруется. Создается рабочая копия отфильтрованного изображения, но с меньшим разрешением. На основе полученных таким образом копий синтезируется воксельная (геометрическая и дискретная) 3D модель содержимого анализируемой сцены с максимально низким (но еще приемлемым для решения прикладной задачи) разрешением (например, формата 81×81×81, если q=3). Эта синтезированная модель сцены подвергается ВА1 с целью обнаружения внутри нее (методом ВЗС) объектов, претендующих стать искомым объектом-ориентиром.
Если такие объекты-претенденты найдены, извлекается исходная воксельная модель исследуемой сцены, обладающая большим разрешением (например, формата 243×243×243, если q=3). Анализ ВА1 применительно к этой новой модели сцены повторяется, но только в отношении областей, окружающих объекты-претенденты, найденные на 1-м этапе ВА1. После подтверждения факта обнаружения объекта-ориентира (например, на 2-м этапе ВА1) определяется разница между координатами, вычисленными СКЗ на основе данных видеоанализатора 8 и СИН 3, и истинными (географическими) координатами объекта-ориентира. В случае их несовпадения производится коррекция текущих показаний блока 3 (с использованием соответствующих формул, зависящих от типа применяемого видеодатчика 10, геометрии корпуса AMP, местоположения видеодатчика 10 на корпусе AMP и др.).
После завершения анализа ВА1 видеоанализатор 8 переходит (с разрешения контроллеров 1 и 7) к выполнению ВА2. Определяются границы финишной области, куда (приблизительно) должен двигаться AMP внутри анализируемой сцены. Положение и границы этой финишной области являются исходными данными для проведения автоматического поиска безопасного маршрута движения. Если искомый объект-ориентир ранее не был обнаружен, границы финишной области (или общее направление движения), необходимые для проведения расчета, определяются исключительно по данным блока 3.
Когда траектория безопасного обхода (состоящая из ломаных прямолинейных отрезков) найдена, видеоанализатор 8 сообщает контроллеру 7 параметры найденной траектории. Контроллер 7 анализирует траектории, полученные от видеоанализаторов 8, выбирает из них оптимальную (по критерию, заданному в программе фунционирования AMP: например, самую короткую, самую безопасную и т.п.). Если такая траектория не найдена, исследуется другой финишный участок (расположенный на границе исследуемой сцены) на возможность выхода AMP из исследуемой сцены. Если оптимальная безопасная траектория найдена, ее параметры передаются контроллеру 1, который анализирует ломаную траекторию, найденную СКЗ AMP, на возможность ее динамической реализации (с учетом маневровых характеристик AMP). В случае положительного ответа контроллер физически реализует найденную ломаную траекторию (переходя последовательно от реализации одного прямолинейного участка этой ломаной траектории к другому) с максимально возможной точностью. Если при имеющихся данных о сцене маршрут выхода из сцены не найден, видеоанализатор 8 сообщает контроллеру 7, что выход AMP из наблюдаемой сцены требует проведения разведовательных перемещений AMP внутри окружающей сцены (путем ее видеомониторинга с других ракурсов).
2.3. Режимы работы видеоанализатора 8
Видеоанализатор 8 имеет семь режимов программного управления блоком 16:
1) режим (РНВА=0) - запись программы управления блоком 16 в память блока 15;
2) режим (РНВА=1) - управление блоком 16 посредством команд блока 15;
3) режим (РНВА=2) - ввод видеоданных с выхода видеокамеры 12 в память 38;
4) режим (РНВА=3) - ввод видеоданных с выходов стереокамеры 13 в память 38;
5) режим (РНВА=4) - ввод видеоданных с выходов дальномера 14 в память 38;
6) режим (РНВА=5) - вывод видеоданных из памяти 38 на монитор;
7) режим (РНВА=6) - вывод видеоданных из памяти 38 на ТВ-передатчик;
В оперативной памяти блока 15 выделен участок для хранения программы управления блоком 16 в режиме РНВА=1. В режиме РНВА=0 содержимое этого участка памяти заполняется информацией, поступающей от контроллера 7. Переход видеоанализатора 8 в режим РНВА=0 осуществляется только по запросу контроллера 7. Весь процесс передачи команд и данных в блок 15 инициируется контроллером 7, блок 15 при этом выполняет лишь подчиненную функцию.
Режим РНВА=1 (при котором блок 15 единолично управляет блоком 16) является основным режимом работы видеоанализатора 8. Окончание работы в режимах РНВА=2, 3,4, 5, 6 всегда сопровождается выходом видеоанализатора 8 в режим РНВА=1 (для чего у регистра РНВА интерфейса 23 имеется дополнительный установочный вход). В отличие от прототипа блок 15 не содержит сопроцессор, напрямую реализующий в прототипе специальную систему команд (см. [11, 12], таблицы 1), оперирующих 2D-АБИ и 3D-АБИ с высокой степенью параллелизации. Вместо этого в блоке 15 заявленного устройства используется типовой микроконтроллер 17 (МК) (например, типа STM32 и т.п.), оперирующий только одномерными двоичными данными (1D-АБИ). Команды МК 17 посредством управления регистрами интерфейса 23 эмулируют вышеуказанную специальную систему команд прототипа. При этом отпадает необходимость в проектировании специального сопроцессора (за счет частичного снижения скорости выполнения некоторых эмулируемых команд). В качестве интефейса 23 используется либо штатный интерфейс МК, либо интерфейс, построенный на основе регистров общего назначения этого МК. Интерфейс 23 содержит в своем составе следующие программно-адресуемые регистры:
1) регистр выбора режима управления блоком 16 (хранит текущий код РНВА);
2) регистры кодов управления блоком 16 в режиме РНВА=1;
3) регистр ввода данных из блока 15 в матрицу 20;
4) регистр вывода данных из матрицы 20 в блок 15.
Программа управления блоком 16 в режиме РНВА=1 представляет собой последовательность типовых команд МК 17, осуществляющих последовательную запись и чтение содержимого регистров интерфейса 23. В РНВА=1 тактирование блока 16 осуществляется переключением разряда ТАКТ одного из регистров интерфейса 23. В режимах РНВА=2, 3, 4, 5, 6 блок 16 управляется одним из микропрограммных автоматов контроллера 25 (фиг. 2, фиг. 9). При РНВА=2, 3, 5, 6 контроллер 25 тактируется тактами генератора 47 (фиг. 8). При РНВА=4 контроллер 25 тактируется тактами дальномера 14.
Программа работы блока 15 хранится в оперативной памяти этого блока и состоит из постоянной и перепрограммируемой частей. Неизменяемая часть отвечает за организацию информационного обмена между блоком 15 и контроллером 7 в режиме РНВА=0. Перепрограммируемая часть служит для управления блоком 16 в режиме РНВА=1. При недостатке собственной памяти типового мироконтроллера 17 в состав блока 15 может быть введена дополнительная оперативная память.
Переход блока 15 в режим РНВА=0 инициируется контроллером 7 с помощью запроса на прерывание текущей программы микроконтроллера 17. При выполнении прерывания устанавливается код РНВА=0, после чего МК 17 переходит к заполнению перепрограммируемой части памяти блока 15 данными, поступающими из контроллера 7. По окончанию процесса перепрограммирования блок 15 переходит в режим РНВА=1, и новая программа (загруженная в память блока 15 вышеописанным способом) запускается.
2.4. Ввод данных с видеодатчиков 10 в память 38 видеоанализатора 8
2.4.1. Ввод данных с видеокамеры 12 или с ТВ-приемника
Ввод начинается с записи (в режиме РНВА=1) кода РНВА=2 в одноименный регистр интерфейса 23. В результате управляющие входы блока 16 отключаются от управляющих выходов регистров интерфейса 23 и подключаются к выходам соответствующих регистров МПА 44 (фиг. 9 и фиг. 10). Тактовый вход блока 16 подключается к выходу генератора АЦП видеокамеры 12 (фиг. 8), на адресных входах (ADR) устанавливается начальный адрес памяти 38 (куда будут записываться значения яркости пикселей вводимого видеоизображения). С приходом кадрового импульса (КИ) от видеокамеры 12 микропрограммный автомат (МПА) 44 включается, после чего начинается ввод поступающих данных в память 38. По мере поступления видеоданных МПА 44 модифицирует ADR.
2.4.2. Ввод данных со стереокамеры 13
МК 17 записывает код РНВА=3. В результате управляющие входы блока 16 подключаются к выходам соответствующих регистров МПА 44 (фиг. 9 и фиг. 10). Выход коммутатора 49 видеосигналов (фиг. 8) с помощью МК 17 подключается к левой видеокамере стереокамеры 13. Селектор 50 из получаемого видеосигнала выделяет строчные (СИ) и кадровые (КИ) синхроимпульсы. Импульсы с выхода генератора 47 одновременно поступают на АЦП 48 и управляющие входы сдвиговых регистров 51 узла 27 ввода видеоданных. С приходом КИ от левой видеокамеры 12 микропрограммный автомат 44 запускается и оцифрованные видеосигналы левой видеокамеры через коммутаторы 51 (фиг. 8) поступают на информационные последовательные входы регистров видеобуфера 52 (фиг. 11). Выход каждого i-го разряда двоичного кода яркости пикселя поступает на последовательный информационный вход своего регистра 52. С приходом каждого импульса ТИ содержимое всех регистров 52 одновременно сдвигается на 1 шаг. После заполнения видеобуфера 52 на адресных входах ADR памяти 38 автомат 44 устанавливает адрес (ADR) АБИ, куда с параллельных выходов видеобуфера 52 будут записываться данные в соответствующие процессоры 30. Запись осуществляется одним импульсом ТИ и одним импульсом rТИ, отстающим от ТИ по фазе (фиг. 12). По окончанию ввода видеоданных с левой видеокамеры автомат 44 устанавливает начальный адрес ADR, куда будут записываться данные с правой видеокамеры. С приходом КИ от правой видеокамеры 12 автомат 44 начинает ввод данных в память 38 вышеописанным способом. По окончанию ввода автомат 44 устанавливает РНВА=1 (т.е. управление блоком 16 передается блоку 15).
2.4.3. Ввод данных со сканирующего дальномера 14
Перед началом ввода блок 15 записывает код РНВА=4 в одноименный регистр интерфейса 23. После чего управляющие входы блока 16 подключаются к выходам соответствующих регистров МАП 44. Тактовый вход блока 16 подключаются к выходу тактового генератора дальномера 14, устанавливается начальный адрес (ADR) памяти 38 (куда будут записываться данные, вводимые с дальномера 14). С приходом КИ от сканирующего дальномера 14 запускается автомат 44. Далее управление производится микрокомандами микропрограммного автомата 44 вышеописанным способом.
2.5. Фильтрация введенных видеоданных в видеоанализаторе 8
Данные, введенные в матрицу 20 с выхода видеодатчика 10, содержат помехи. Влияние этих помех минимизируется методами статистической фильтрации (сглаживанием 2D и 3D изображений). Наибольшее число помех содержат 2D изображения, формируемые видеокамерами 12 и стереокамерами 13. На этапе фильтрации полутоновых изображений помимо сглаживания осуществляется дифференцирование яркости их пикселей (например, путем вычисления лапласиана с гауссианой [22, 23]). Процедура фильтрации заключаются в формировании новых значений яркости пикселей на новом (отфильтрованном) плоском изображении по яркости пикселей на исходном (фильтруемом) фотоизображении и яркости их пикселей-соседей. В случае реализации низкочастотного фильтра число анализируемых пикселей-соседей будет больше, в случае реализации высокочастотного фильтра их число будет меньше. Принцип фильтрации полутоновых изображений с помощью видеоанализатора 8 аналогичен принципу, описанному в прототипе ([12] стр. 38, фиг. 27).
2.6. Высокоскоростной синтез воксельной модели содержимого отсканированной сцены в видеоанализаторе 8
2.6.1. Синтез по данным, полученным от сканирующего дальномера 14
Дальномер 14 в процессе своего функционирования генерирует на своих выходах:
- последовательность значений дальности  от центра ОД сканирования дальномера 14 до точек сканируемой сцены, способных отражать сканирующий луч дальномера 14;
от центра ОД сканирования дальномера 14 до точек сканируемой сцены, способных отражать сканирующий луч дальномера 14;
- строчные и кадровые синхроимпульсы дальномера 14, информирующие наше устройство об угловом положении лазерного луча в момент сканирования сцены.
Эти видеоданные (оцифрованные и введенные в матрицу 20) сначала представляются видеоанализатором 8 в виде параметрического полутонового 3D изображения, состоящего из параллелепипедов  являющихся 3D растровыми параметрическими моделями ЭОС (фиг. 13 - а, б). После его нормализации (когда Δβ=1, Δε=1 и
являющихся 3D растровыми параметрическими моделями ЭОС (фиг. 13 - а, б). После его нормализации (когда Δβ=1, Δε=1 и  ) параллелепипеды
) параллелепипеды  превращаются в кубические псевдо-воксели 1×1×1, каждый из которых является нормализованной параметрической (псевдо-воксельной) моделью своей ЭОС. При этом общие результаты сканирования сцены представляются в виде некоторого псевдо-воксельного 3D-БСИ, в котором «яркость» псевдо-вокселя 1×1×1 равняется «1» (Ф1=1), если удаленность хотя бы одной точки его ЭОС до центра (ОД) сканирования дальномера 14 совпадает (с точностью до Δβ, Δε,
превращаются в кубические псевдо-воксели 1×1×1, каждый из которых является нормализованной параметрической (псевдо-воксельной) моделью своей ЭОС. При этом общие результаты сканирования сцены представляются в виде некоторого псевдо-воксельного 3D-БСИ, в котором «яркость» псевдо-вокселя 1×1×1 равняется «1» (Ф1=1), если удаленность хотя бы одной точки его ЭОС до центра (ОД) сканирования дальномера 14 совпадает (с точностью до Δβ, Δε,  ) со значением
) со значением  , полученным от дальномера 14. В противном случае «яркость» псевдо-вокселя равняется Ф1=0. Указанное 3D-БСИ имеет формат
, полученным от дальномера 14. В противном случае «яркость» псевдо-вокселя равняется Ф1=0. Указанное 3D-БСИ имеет формат  , в котором каждому положению сканирующего луча (т.н. (β,ε)-луча) с целочисленным значением азимута β и целочисленным значением ε (угла места) соответствует строка
, в котором каждому положению сканирующего луча (т.н. (β,ε)-луча) с целочисленным значением азимута β и целочисленным значением ε (угла места) соответствует строка  псевдо-вокселей 1×1×1. В евклидовом пространстве R3 этой строке соответствует участок телесного угла (фиг. 13-а), состоящий из цепочки ЭОС, стоящих друг за другом (вдоль указанного (β,ε)-луча) и чьи габариты с возрастанием
псевдо-вокселей 1×1×1. В евклидовом пространстве R3 этой строке соответствует участок телесного угла (фиг. 13-а), состоящий из цепочки ЭОС, стоящих друг за другом (вдоль указанного (β,ε)-луча) и чьи габариты с возрастанием  растут. Псевдо-воксели, моделирующие ЭОС, одинаково удаленные до оптического центра ОД, образуют в псевдо-воксельном 3D-БСИ
растут. Псевдо-воксели, моделирующие ЭОС, одинаково удаленные до оптического центра ОД, образуют в псевдо-воксельном 3D-БСИ  слой Nβ×Nε×1 (фиг. 13-в), который в пространстве R3 преобразуется в сферическую оболочку с центром ОД, имеющую постоянную толщину
слой Nβ×Nε×1 (фиг. 13-в), который в пространстве R3 преобразуется в сферическую оболочку с центром ОД, имеющую постоянную толщину  (фиг. 13-д).
(фиг. 13-д).
Построение воксельной (геометрической} модели содержимого сцены из его псевдо-воксельной модели, представленной в виде единичного содержимого 3D-БСИ, начинается с построения воксельной модели самой дальней от ОД сферической оболочки. Для этого средствами ВВ синтезируется воксельная модель самой крупной ЭОС (форма и габариты этой модели показаны на фиг. 13-а). Затем последовательно просматриваются бинарные уровни яркости псевдо-вокселей 1×1×1, принадлежащих слою Nβ×Nε×1 для  (фиг. 13-б, в). Если у псевдо-вокселя Ф1=1, всем вокселям воксельной модели этой ЭОС присваивается яркость Ф2=1. Затем воксельная модель «поворачивается» (с помощью соответствующего ДО) на (β,ε)-угол относительно ОД, и результат «поворота» в виде АБИ (или БСИ) устанавливается в результирующее 3D-БСИ формата (xmax-xmin)×(ymax-ymin)×(zmax-zmin).
(фиг. 13-б, в). Если у псевдо-вокселя Ф1=1, всем вокселям воксельной модели этой ЭОС присваивается яркость Ф2=1. Затем воксельная модель «поворачивается» (с помощью соответствующего ДО) на (β,ε)-угол относительно ОД, и результат «поворота» в виде АБИ (или БСИ) устанавливается в результирующее 3D-БСИ формата (xmax-xmin)×(ymax-ymin)×(zmax-zmin).
При переходе к следующим (более близким к ОД) слоям Nβ×Nε×1 габариты ЭОС в общем случае равномерно сжимаются (фиг. 13-а). Для моделирования этого сжатия у предыдущей воксельной модели ЭОС удаляются поверхностные воксели (все или только часть - фиг. 13-г). После чего вышеуказанным способом строится воксельная модель содержимого следующей сферической оболочки. Процедура синтеза воксельной модели зондируемой сцены завершается построением воксельной модели самой ближней к ОД сферической оболочки, соответствующей  .
.
2.6.2. Синтез по данным, полученным от стереокамеры 13
При сканировании сцены стереокамерой 13 синтез 3D модели содержимого сцены начинается с поиска корреспондирующих пикселей на левом и правом изображениях стереопары, предварительно введенных и отфильтрованных в матрице 20. Яркость двух корреспондирующих пикселей 1×1 вызвана одним и тем же источником света. Тем не менее, эти яркости могут существенно отличаться (из-за разной чувствительности фотоэлементов левой и правой камер, различной прозрачности их объективов, разных ракурсов наблюдения и т.п.), поэтому совпадение яркости пикселей левого и правого изображений не является надежным признаком при поиске корреспондирующих пикселей. Более надежными признаками являются градиенты яркости сравниваемых пикселей, а также лапласианы яркости (вторые производные яркости) и лапласианы с гауссианой (вторые производные со сглаживанием) яркости [22, 23]. Поэтому перед построением псевдо-воксельной модели содержимого сцены (в виде 3D-БСИ формата Nэ×Nлев×Nправ - фиг. 14-а) исходная стереопара преобразуется в стереопару, у которой на левом и правом изображениях исходные уровни яркостей пикселей стереопары заменены их лапласианами с гауссианой (способом, примененным в прототипе [12]). После такого преобразования синтез искомой псевдо-воксельной модели производится картинными псевдо-воксельными слоями, расположенными относительно слоев 1×Nлев×Nправ перпендикулярно и под углами 45° относительно слоев Nэ×1×Nправ и Nэ×Nлев×1 - (фиг. 14-а). Псевдо-вокселям 1×1×1, относящимся к картинному псевдо-воксельному слою такого 3D-БСИ, соответствуют ЭОС, центры которых одинаково удалены от картинной плоскости стереокамеры (фиг. 14-б). Пересечение картинного псевдо-воксельного слоя со слоем 1×Nлев×Nправ образует диагональную строку (фиг. 14-а). Синтез картинных слоев 3D-БСИ Nэ×Nлев×Nправ производится такими диагональными псевдо-воксельными строками.
Построение 1-го картинного псевдо-воксельного слоя (наиболее близкого к картинной плоскости стереокамеры) начинается с «наложения» левого и правого преобразованных изображений, когда крайний правый столбец (перпердикулярный эпиполярным строкам) пикселей левого изображения полностью накладывается на крайний левый (т.е. 1-й слева) столбец пикселей правого изображения. После такого наложения каждый пиксель левого изображения и наложенный на него пиксель правого изображения (относящиеся к одной эпиполярной строке стереокамеры 13) образуют пару пикселей, претендендующих стать корреспондирующими пикселями. Перед построением каждого (i-го) картинного псевдо-воксельного слоя описанное наложение (при котором крайне правый столбец пикселей левого изображения полностью накладывается на i-й (слева) столбец пикселей правого изображения) повторяется. Таким образом, если в 1-м картинном слое каждая его строка представлена только одной парой пикселей-претендентов, то в 2-м - уже двумя, в 3-м - тремя и т.д. Таким образом, с увеличением номера картинного слоя (т.е. с удалением слоя от картинной плоскости стереокамеры 13) число пар пикселей, претедующих стать корреспондирующими, возрастает (фиг. 14-а, б).
При анализе пикселей, претендующих стать корреспондирующими, используется корреляционный метод сравнения их яркостей. Для чего вокруг каждого пикселя-претендента определяется его близкодействующая зона. Каждый пиксель, входящий в эту зону, объявляется пикселем-соседом данного пикселя-претендента. На фиг. 15 показаны различные варианты близкодействующих зон пикселей-претендентов. Пиксели-претенды объявляются корреспондирующими, если одновременно выполняются условия:
1) значения лапласианов с гауссианой для обоих пикселей-претендентов и их всех пикселей-соседей одновременно не равны нулю;
2) значения лапласианов с гауссианой у пикселей-претендентов и всех их пикселей-соседей по-пиксельно совпадают (кроме случая, описанного в п. 1).
Когда два пикселя-претендента объявляются корреспондирующими, то псевдо-воксель 1×1×1, соответствующий им в результирующем псевдо-воксельном 3D-БСИ, принимает яркость Ф1=1. Для всех псевдо-вокселей, для которых корреспондирующие пиксели не найдены, Ф1=0.
Затем видеанализатор 8 строит вексельную (геометрическую или евклидовую) модель содержимого наблюдаемой сцены. Основой для ее построения являются: ранее синтезированная псевдо-воксельная 3D-БСИ, а также линейная геометрическая 3D модель области, сканируемой стереокамерой 13 (фиг. 14-б). Эта линейная модель строится по законам геометрической оптики, исходя из следующих представлений:
- пиксели левого и правого изображений стереокамеры 13 имеют форму квадрата 1×1, две стороны которого параллельны базе (а) стереокамеры 13, а две других - ортогональны а;
- вся 3D область сцены, сканируемая стереокамерой 13, образована пересечением 3D области сканирования левой видеокамеры с 3D областью сканирования правой видеокамеры (фиг. 14-б).
Линейная модель ЭОС стереокамеры 13 образуется пересечением 8 полупространств:
- двух полупространств, ограниченных плоскостями, проходящими через центр Олев левой видеокамеры и одну из 2-х сторон пикселя 1×1 левого изображения, параллельных а;
- двух полупространств, ограниченных плоскостями, проходящими через центр Олев левой видеокамеры и одну из 2-х сторон пикселя 1×1 левого изображения, ортогональных а;
- двух полупространств, ограниченных плоскостями, проходящими через центр Оправ правой видеокамеры и одну из 2-х сторон пикселя 1×1 правого изображения, параллельных а;
- двух полупространств, ограниченных плоскостями, проходящими через Оправ.
Синтез содержимого 3D-БСИ, «единичное» содержимое которого (т.е. состоящее из вокселей с Ф2=1) является воксельной (геометрической) моделью содержимого наблюдаемой сцены, осуществляется путем последовательного построения воксельных моделей ее отдельных ЭОС. Для этого:
1) яркость всех вокселей синтезируемого 3D-БСИ сцены обнуляется (Ф2=0)
2) для каждой ЭОС, псевдо-воксель которой имеет яркость Ф1=1, строится своя воксельная модель ЭОС (в виде отдельного 3D-АБИ), чьи воксели имеют Ф2=1;
3) содержимое всех 3D-БСИ ЭОС параллельным переносом устанавливается внутри общей результирующей 3D-БСИ, «единичное» содержимое которой образует искомую воксельную (геометрическую) модель содержимого всей наблюдаемой сцены.
2.7. Синтез вексельных моделей виртуальных зондов в видеанализаторе 8
В отличие от синтеза воксельной модели сканируемой сцены, опирающегося на данные, полученные от видеодатчика 10, воксельная модель виртуального зонда чаще всего является полностью искусственным объектом, программно формируемым видеоанализатором 8 в режиме РНВА=1 по априорному математическому описанию геометрии зонда. В отличие от прототипа (в котором для высокопараллельной обработки 2D-АБИ и 3D-АБИ используется специальный сопроцессор) программы высокоскоростного синтеза воксельных моделей зондов состоят только из команд микроконтроллера 17, эмулирующих вместе систему команд обработки 2D-АБИ и 3D-АБИ прототипа (см. [12], таблица 1).
2.8. Визуализация изображений, синтезированных в видеанализаторе 8
При выполнении ряда технологических операций (отладка программ видеоанализатора 8, обмен видеоинформацией между AMP в мультиагентной автономной системе, а также контроль работы AMP со стороны человека-оператора и др.) требуется наличие у видеоанализатора 8 возможности визуализировать содержимое памяти 38 на экране монитора или телевизора. С этой целью используются 2 режима работы видеоанализатора 8: визуализация на экран компьютерного монитора (РНВА=5) и визуализация на экране телевизора (РНВА=6). В обоих случаях используется узел 28, состоящий из блока последовательных двоичных сдвиговых регистров 53, имеющих общие сигналы управления (Load, ТИ). Параллельные информационные входы всех регистров 53 соединены с выходами соответствующих процессоров 30 (фиг. 11). В режиме РНВА=5 на последовательных выходах двух регистров 53 формируются строчные (СИ) и кадровые (КИ) синхроимпульсы соответственно. На последовательных выходах других регистров 53 формируется двоичный код яркости (цветности) пикселей выводимого видеоизображения, поступающий на информационные входы ЦАП 54.
Поскольку телевизор может с успехом выполнять функцию беспроводного монитора, работу автоматов 45 и 46 рассмотрим на примере автомата 46. Еще до перехода в режим РНВА=6 в участке памяти 38 (с последовательными значениями ADR) синтезируется (в режиме РНВА=1) цифровой код полного телевизионного сигнала (ПТС), в котором строчные и кадровые синхроимпульсы встроены в яркостный код выводимого видеосигнала. Перед выводом ПТС в регистр интерфейса 23 записывается код РНВА=6. С приходом КИ (фиг. 22-б) из автомата 46 (фиг. 22-б) управляющие входы блока 16 подключаются к выходам соответствующих регистров автомата 46 (фиг. 9 и фиг. 10). Выводимый ПТС (или его фрагмент) извлекается из памяти 38, записывается в триггеры 33 процессоров 30. По импульсу «Load» (поступающему из автомата 46) это изображение (или его фрагмент) одномоментно записывается в регистры 53 (фиг. 11). На входе ЦАП появляется первый код яркости сигнала ПТС. С каждый импульсом ТИ содержимое регистров 53 будет сдвигаться на один разряд вправо, а на выходе ЦАП будет формироваться следующее значение аналогового сигнала ПТС. По окончанию вывода всего кадра изображения специальный сигнал автомата 46 устанавливает РНВА=1 (т.е. управление блоком 16 передается блоку 15).
2.9. Реализация видеонавигационного анализа №1 (ВА1) в видеоанализаторе 8
Выполнение ВА1 может быть сведено к двум принципиально разным типам задач распознавания. Первый тип задач связан с распознаванием видимых 3D объектов-ориентиров, либо чрезвычайно удаленных от AMP, либо наблюдаемых при помощи монокулярной видеокамеры 12. В этом случае для распознавания используются плоские (пиксельные) модели зондов.
Во втором типе задач применяются датчики 13 и 14 объемного зрения, близкое расположение которых до исследуемых объектов сцены позволяет использовать 3D геометрические характеристики распознаваемого объекта-ориентира для повышения скорости и точности распознавания объектов-ориентиров (или объектов-целей, отличающихся от объектов-ориентиров, отсутствием постоянных географических координат). В видеанализаторе 8 для этой цели используются метод ВЗС на базе воксельной АПТОС, а также виртуальные 3D зонды в виде быстросинтезируемых вексельных (геометрических) моделей объектов-ориентиров (или объектов-целей). Выполнение ВА1 в устройстве продемонстрируем на примере задач данного типа.
С целью повышения скорости и качества распознавания объекта-ориентира процедура ВА1 выполняется в устройстве способом многоитерационного зондирования сцены, когда на каждом последующем этапе итерации применяются зонды большего разрешения. Целью выполнения каждой k-й итерации является сокращение числа ЭАЗ, требующихся для полноценного зондирования сцены на (k+1)-м этапе итерации с применением вексельных моделей более высокого разрешения. Максимальная скорость зондирования достигается в видеоанализаторе 8, когда разрешающая способность воксельной модели зонда совпадает с разрешающей способностью матрицы 20. В этой связи на начальном (1-м) этапе итерации разрешение воксельной модели зонда (ВМЗ) не превышает разрешения q2×q2×q2. Чтобы получить на каждой последующей итерации результаты зондирования более точные, чем результаты, полученные на предыдущей итерации, разрешающие способности ВМЗ и ВМС с каждой последующей итерацией возрастают.
Пусть q=3, тогда на 1-й итерации разрешение ВМЗ не должно превышать 9×9×9. Предположим, что на 1-й итерации анализируемая воксельная модель сцены (ВМС), соответствующая (9×9×9)-форматному ВМЗ, имеет разрешение 81×81×81. Пусть 3D-БСИ, содержащеее эту ВМС (сформированную по данным видеомониторинга), имеет разрешение 243×243×243, а разрешение 3D-БСИ, содержащее машинно-синтезированную ВМЗ, имеет разрешение, 81×81×81, а число проводимых итераций не превышает двух. Команда сжатия (9×9×9)-форматного АБИ в q раз реализована в преобразователе 22 аппаратно. 1-я итерация распознавания завершается построением списка линейных и угловых координат зонда, обнаруженных на этой итерации распознавания и удовлетворяющих заданным геометрическим признакам объекта-ориентира (характерным только для 1-й итерации). По окончанию последнего (2-го, в нашем случае) этапа итерации список найденных вариантов распознавания должен быть либо пустым (объект-ориентир внутри сканируемой сцены отсутствует), либо состоять только из одного такого распознавания (объект-ориентир обнаружен и он единственный).
Перед выполнением 1-й итерации распознавания сжатию подвергаются (до минимально допустимого разрешения) исходная ВМС (в нашем случае, с 243×243×243 до 81×81×81) и ВМЗ (например, с 81×81×81 до 9×9×9). Так как перед 1-й итерацией список предварительных распознаваний пуст, на 1-й итерации тестированию на совпадение геометрических признаков искомого участка ВМС с геометрическими признаками ВМЗ подлежит все максимально большое число возможных пространственных положений оболочечной ВМЗ 9×9×9 внутри оболочечной ВМС 81×81×81. Число ЭАЗ на 1-й итерации является, как правило, самым большим из всех последующих итераций распознавания.
Подробно рассмотрим способ реализации ВА1, основанный на применении:
- множества 3D ракурсных воксельных моделей зонда, каждая из которых моделирует видимую часть объекта-ориентира, если бы этот объект-ориентир был виден из ОД под конкретным углом зрения (ракурсом - фиг. 16-а);
- воксельной модели анализируемой сцены, состоящей из множества ракурсных воксельных моделей 3D объектов, видимых под разными ракурсами из оптического центра (ОД) датчика объемного зрения AMP (фиг. 16-б, в);
- конечного множества (пучка) 3D циклических псевдопрямых траекторий зондирования, каждая из которых моделирует крайне узкий пучок лучей, исходящих из оптического центра (ОД) видеодатчика объемного зрения AMP и входящих в обзорную сферу, разбитую в видеанализаторе 8 на 48 сферических сегментов (ССП - фиг. 17(в-е)).
При данном способе распознавания каждая итерация распознавания, состоит из нескольких зондирующих циклов (ЗЦ). Каждый ЗЦ - это зондирование сцены вдоль нескольких псевдопрямых траекторий зондирования, переходящих друг в друга при их поворотах на углы кратные 90° вокруг осей OPXP, OPYP, OPZP и (или) при преобразованиях симметрии относительно плоскостей OPXPZP, OPXPYP, OPYPZP. Каждая такая псевдопрямая траектория зондирования моделирует не один луч (не один ракурс, не один угол зрения), а бесконечно большой, но хотя весьма узкий пучок лучей.
Псевдопрямые траектории зондирования, относящиеся к одному ЗЦ, образуют замкнутую группу (не превышающую 48 псевдопрямых), переходящих друг в друга при выполнении последовательности преобразований, состоящей из вышеуказанных плоскостных симметрий и ортогональных поворотов (фиг. 17). Синтез 48 3D ракурсных ВМЗ, соответствующих каждому из 48 ССП обзорной сферы видеодатчика, выполняется в полном объеме только для одного ССП. Другие 47 ракурсных ВМЗ этого ЗЦ формируются из первой синтезированной ракурсной ВМЗ в ускоренном режиме (посредством преобразований симметрий и ортогональных поворотов).
Конечное число псевдопрямых траекторий зондирования прямопропорционально:
- числу ССП в телесном угле обзора видеодатчика (не более 48 - фиг. 17);
- числу аппаратно-реализованных ДО, моделирующих 3D повороты (одновременно вокруг двух взаимно-ортогональных осей - фиг. 17-а) с максимальной параллелизацией;
- числу аппаратно-реализованных ДО, моделирующих 3D повороты вокруг одной оси с предельной степенью параллелизации.
Так как наиболее простыми и удобными для реализации в видеанализаторе 8 являются циклические псевдопрямые траектории зондирования, простейшая и самая быстрая процедура распознавания использует для зондирования сцены только циклические псевдопрямые траектории и ракурсные воксельные модели зондов.
2.9. Высокоскоростной поиск безопасного маршрута движения AMP (ВА2)
Чтобы удовлетворить требованию безаварийного перемещения AMP, исследуемая сцена, которую предстоит пересечь AMP, должна быть подвергнута анализу на обнаружение хотя бы одного безопасного маршрута движения. Поиск такого маршрута включает в себя:
1) ВА2 - виртуальное зондирование с целью поиска безопасной ломаной траектории (при этом роль зонда EP выполняет сплошная воксельная модель AMP, роль обобщенного объекта-препятствия ES выполняет сплошная воксельная модель ES);
2) преобразование ломаной траектории (найденной на этапе ВА2 в видеоанализаторе 8) в динамически реализуемую траекторию (моделирующую ломаную траекторию с максимальной точностью).
В наиболее сложных случаях поиск траектории прохождения сцены может потребовать выполнение нескольких видеомониторингов, перемежающихся разведовательными перемещениями AMP для изменения ракурса сканирования исследуемой сцены. В этом случае каждый ВА2, выполненный после очередного видеомониторинга сцены, готовит маршрут предстоящего разведовательного перемещения AMP.
2.9.1. Выполнение ВА2 при планировании маршрута движения безопорных AMP
Общий принцип поиска безопасной 3D траектории движения AMP, реализуемый в устройстве, удобно рассмотреть на примере «безопорных» высокоманевренных AMP (летающих, подводных и космических), обладающих максимальным числом степеней свободы, способных свободно перемещаться внутри исследуемой сцены вдоль трех ее декартовых координатных осей (вертикальной оси OSZS, и двух горизонтальных осей - OSXS и OSYS). Типичным примером такого AMP является автономный мультикоптер (фиг. 19). Зондируемую ВМС представим в виде единичного содержимого 3D-БСИ кубического формата (например, 81×81×81). Это единичное содержимое будет состоять из конечного числа воксельных моделей-препятствий (ВМП0, ВМП1, …), не связанных топологически. Именно эти ВМП должна будет обойти ВМЗ (фиг. 19-а, б) при прохождении безопасного маршрута движения AMP (фиг. 19-в и фиг. 20). Введем некоторые обозначения:
1) Xst, Yst, Zst - целочисленные координаты точки старта AMP внутри анализируемой сцены (или начальная точка управляющего цикла AMP);
2) Xƒin, Yƒin, Zƒin - целочисленные координаты центральной точки финишной области, на которую планируется выход AMP из сцены;
3) Х, Y, Z - целочисленные координаты текущей точки зондирования ВМС (по-другому, текущее положение ВМЗ);
4) L-X - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
5) L+X - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
6) L-Y - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
7) L+Y - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
8) L-Z - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
до столкновения с препятствием или до выхода ВМЗ за границы ВМС;
9) L+Z - расстояние от центра ВМЗ в направлении  до столкновения с препятствием или до выхода ВМЗ за границы ВМС.
до столкновения с препятствием или до выхода ВМЗ за границы ВМС.
Обе точки (Xst, Yst, Zst) и (Xƒin, Yƒin, Zƒin) определяют:
- угол азимута  ;
;
- угол места  .
.
По вычисленным значениям α и ε определяются азимут α1 и угол места ε1 циклической псевдопрямой 1-го участка зондирования (для которых α1≈α; ε1≈ε) так, чтобы ВМЗ, двигаясь по этой псевдопрямой, пересекла заданную финишную область с центром в точке (Хƒin, Yƒin, Zƒin).
Направление начального участка траектории обхода препятствий ищется из предположения, что между стартовым положением ВМЗ (Xst, Yst, Zst), и идеальным финишным положением ВМЗ (Xƒin, Yƒin, Zƒin), воксельных моделей препятствий (ВМП) нет. С целью сокращения пути AMP от старта до финиша начальный рекогносцировочный участок траектории движения ВМЗ выберем прямолинейным. В видеоанализаторе 8 этот участок будет моделироваться циклической псевдопрямой (фиг. 19-в), направление которой максимально совпадает с направлением прямой, соединяющей точки (Xst, Yst, Zst) и (Xƒin, Yƒin, Zƒin).
Если в результате зондирования ВМС по первой циклической псевдопрямой столкновений ВМЗ с ВМП не обнаружено, безопасная траектория движения AMP считается найденной. Если же столкновение обнаружено, ВМЗ возвращается на один или несколько циклов назад по предыдущей циклической псевдопрямой зондирования, после чего начинается поиск обхода обнаруженного препятствия (фиг. 20). Обход ищется только вдоль псевдопрямых, параллельных осям OSXS, OSYS, OSZS (OPXP, OPYP, OPZP), т.к. зондирование ВМС вдоль этих ортогональных псевдопрямых выполняется в ВВ с наибольшей скоростью.
В каждом из 6 указанных направлений отмечаются наиболее перспективные направления, для которых выполняется:
- либо равенство X=Xƒin при движении вдоль OSXS без столкновений;
- либо равенство Y=Yƒin при движении вдоль OSYS без столкновений;
- либо равенство Z=Zƒin при движении вдоль OSYS без столкновений;
Затем из числа отмеченных направлений определяются наиболее перспективные, которые бы могли привести к наиболее быстрому обходу первоначально обнаруженной ВМП на основании имеющихся (в данный момент времени) сведений о сцене.
Так как в нашем случае траектория обхода состоит только из псевдопрямых, то сначала ищутся траектории обхода, состоящие только из двух, потом из трех, затем четырех и т.д. псевдопрямых. Для определенности ограничим число псевдопрямых в траектории обхода до трех. Если траектории обхода, удовлетворяющие вышеуказанным условиям, не обнаружены, ВМЗ вновь возвращается на один или несколько циклов назад по 1-й псевдопрямой зондирования, после чего попытки обхода обнаруженной ВМП продолжаются вышеописанным способом. Лучший результат виртуального обхода, при котором видимая траектория обхода наиболее близко подошла к точке (Xƒin, Yƒin, Zƒin), запоминается в видеоанализаторе 8.
Если попытки виртуального обхода первой ВМП не увенчались успехом, а команда преодоления сцены роботом не снята, AMP, используя лучшую виртуальную траекторию (найденную ранее), физически перемещается в точку с новым ракурсом. После этого описанный процесс виртуального зондирования сцены повторяется.
2.9.2. Выполнение ВА2 для AMP, перемещающихся по опорной поверхности
Поиск безопасного маршрута движения AMP, перемещающихся по опорной поверхности, чрезвычайно сильно зависит от характеристик опорной поверхности, по которой перемещается наземный AMP. Наличие опорной поверхности и ее особенности могут, как сильно упростить поиск безопасного маршрута движения наземного AMP по сравнению с летающими AMP (например, при движениие AMP по горизонтальному полу), так и значительно усложнить этот поиск. Рассмотрим выполнение ВА2 в устройстве на примере движения наземного AMP по условно-гладкой опорной поверхности.
Математически точная гладкая поверхность Р имеет в каждой своей точке только одну касательную плоскость к данной поверхности. Реальные опорные поверхности, по которым перемещаются AMP, строго говоря, такими не являются. Однако при некоторых допущениях свойства многих реальных опорных поверхностей достаточно точно могут быть описаны математическими гладкими поверхностями. Назовем такие опорные поверхности условно-гладкими. Наличие условно-гладкой опорной поверхности порождает новый вид препятствий, который ранее не рассматривался, а именно: недопустимый подъем опорной поверхности и недопустимый спуск опорной поверхности.
Для выполнения ВА2 принимается следующая концептуальная модель наземного AMP (КМР). КМР состоит из двух жестко связанных частей: корпуса AMP (КР) и его шасси (ШР). Если КР (как и раньше) служит для обнаружения столкновений наземного AMP с препятствиями, то назначение ШР - определение наклона опорной плоскости в точке зондирования модели сцены. КР опирается на ШР, а ШР через свою опорную плоскую площадку опирается на условно-гладкую поверхность Р, но только в одной точке (OP). Только когда касательная плоскость к поверхности Р в точке OP будет совпадать с плоскостью опорной площадки ШР. Столкновениями наземного AMP с препятствиями считаются только столкновения КР с препятствиями. Столкновения ШР с препятствиями столкновениями (с точки зрения проходимости AMP) не считаются. Положение КМР на поверхности Р характеризуется:
1) вектором-нормалью  , представляющим собой вектор единичной длины, направленный вдоль оси вращения КМР от OP к КР;
, представляющим собой вектор единичной длины, направленный вдоль оси вращения КМР от OP к КР;
2) координатами (X, Y, Z) опорного центра OP в анализируемой сцене;
3) углом поворота КМР вокруг собственной оси вращения.
Рассмотрим задачу поиска безопасного маршрута движения AMP по условно-гладкой поверхности Р из точки (Xst, Yst, Zst) в точку (Хƒin, Yƒin, Zƒin) с обходом препятствий, лежащих на поверхности Р. Пусть, для определенности, КР имеет форму усеченного конуса, а ШР представляет собой круг с центром OP, лежащий в опорной плоскости, параллельный нижнему основанию конуса КР, совпадающий по размерам с этим основанием и удаленный от него на расстояние D (рис. 5.4.4-а). В этом случае воксельная модель AMP (ВМЗ) разбивается на две жестко-связанные модели: воксельную модель КР (ВМКР) и воксельную модель ШР (ВМШР). ВМКР хранится в ВВ в виде единичного содержимого БСИ формата KxA×KyA×KzA, а ВМШР - в виде единичного содержимого БСИ SxA×SyA×SzA. ВМС (представляющее собой «облако вокселей») хранится в ВВ в виде единичного содержимого БСИ MxA×MyA×MzA и объединяет в себе как вексельные модели препятствий сцены, так и воксельную модель самой опорной поверхности Р.
Начальное направление маршрута движения AMP будем искать из предположения, что препятствий (т.е. ВМП) между (Xst, Yst, Zst) и (Xƒin, Yƒin, Zƒin) нет. Траектория зондирования, проходящая по Р от (Xst, Yst, Zst) до (Хƒin, Yƒin, Zƒin) синтезируется следующим образом:
1) сначала строится воксельная модель плоскости, параллельной OSZS;
2) затем эта воксельная модель плоскости с помощью ДО «поворачивается» на угол  вокруг прямой, параллельной OSZS;
вокруг прямой, параллельной OSZS;
3) «повернутая» воксельная модель плоскости параллельно смещается в плоскости XSOSYS, так, чтобы она пересекла воксель с координатами (Xst, Yst, Zst);
4) выполняется теоретико-множественная операция «пересечение» между ВМС и воксельной моделью повернутой и смещенной плоскости;
5) воксельная модель, сформированная в результате выполненного пересечения, содержит нижнюю криволинейную границу (с наименьшими значениями ZS), которая и является искомой траекторией зондирования по поверхности Р от точки (Xst, Yst, Zst) до точки (Xƒin, Yƒin, Zƒin).
Затем начинается процедура зондирования. Каждый ЭАЗ в точке зондирования начинается с поиска вектора-нормали опорной плоскости. Для этого ВМШР (OP) с заданной угловой ориентацией устанавливается в точку OP зондирования, а затем выполняется теоретико-множественная операция «пересечение» между ВМС и ВМШР. После этого вычисляется объем единичного содержимого БСИ, сформированного в результате выполненного пересечения. Опорной площадке присваивается тот номер угловой ориентации, который привел к наибольшему значению объема единичного содержимого БСИ в данной точке зондирования (фиг. 21-б). Далее в этой точке исследуемая ВМС зондируется ВМКР, обладающей найденной угловой ориентацией. Если столкновение не обнаружено, осуществляется переход к следующей точке зондирования и т.д. Если на всей траектории зондирования виртуальных столкновений нет, то AMP приступает к физической реализации маршрута.
Если виртуальное столкновение обнаружено, зонд отступает по старой траектории зондирования назад от обнаруженного препятствия на один или несколько циклов. После чего в этом месте ВМС делается сечение воксельной моделью плоскости, расположенной параллельно XSOSZS (или YSOSZS), посредством теоретико-множественной операции «пересечение». Это сечение также содержит нижнюю (в общем случае) криволинейную границу (с наименьшими значениями ZS), которая и является новой искомой траекторией зондирования по поверхности Р для поиска траектории обхода ранее обнаруженного препятствия.
2.10. Реализация сравнения зонда и зондируемой сцены в видеоанализаторе 8
Пусть виртуальный зонд представлен в ВВ в виде единичного содержимого БСИ формата KxA×KyA×KzA, где а А=q2, а зондируемая сцена - в виде единичного содержимого БСИ формата MxA×MyA×MzA, где Kx<Мх, Ky<My, Kz<Mz, а Kx, Ky, Kz, Мх, My, Mz - числа целые (фиг. 29-а). Масштабы одноцветного содержимого в двух указанных БСИ совпадают. Вид пространственной интерпретации адресного пространства БСИ соответствует фиг. 24. Рассмотрим способы высокоскоростной реализации функций зондирования над двумя указанными БСИ в ВВ, заключающиеся в проведении:
- анализа на пересекаемость единичного содержимого данных БСИ;
- анализа на совпадение геометрической формы единичного содержимого двух указанных БСИ.
2.10.1. Анализ на пересекаемость содержимого двух БСИ в устройстве
Анализ на пересекаемость единичного содержимого БСИ KxA×KyA×KzA и БСИ MxA×MyA×MzA заключается в нахождении хотя бы одного вокселя 1×1×1 с яркостью 1, принадлежащего БСИ KxA×KyA×KzA, и одного вокселя 1×1×1 с яркостью 1, принадлежащего БСИ MxA×MyA×MzA, которые при наложении БСИ KxA×KyA×KzA в точке с (xp, yp, zp) БСИ МхА×MyA×MzA совпадают (фиг. 29-а).
Каждый i-й АБИ-фрагмент А×А×А (AБИi), принадлежащий БСИ KxA×KyA×KzA (где 1≤i≤KxKyKz) пересекает, в общем случае, 8 соседних АБИ-фрагментов, принадлежащих БСИ MxA×MyA×MzA. Эти 8 АБИ-фрагментов отсекают от AБИi 8 областей: Gi1÷Gi8 соответственно (фиг. 29-б).
Анализ на пересекаемость содержимого БСИ KxA×KyA×KzA и содержимого БСИ MxA×MyA×MzA состоит в выполнении 8  операций «пересечение» над содержимым Gi1÷Gi8 всех KxKyKz АБИ-фрагментов А×А×А, принадлежащих БСИ KxA×KyA×KzA, с содержимым соответствующих АБИ-фрагментов БСИ MxA×MyA×MzA. Если результатом хотя бы одной из этих операций будет не пустое единичное содержимое результирующего АБИ-фрагмента, то содержимое БСИ KxA×KyA×KzA и БСИ MxA×MyA×MzA объявляются взаимно-пересекающимися. ВВ позволяет за время, сравнимое с тактом управления ВВ:
операций «пересечение» над содержимым Gi1÷Gi8 всех KxKyKz АБИ-фрагментов А×А×А, принадлежащих БСИ KxA×KyA×KzA, с содержимым соответствующих АБИ-фрагментов БСИ MxA×MyA×MzA. Если результатом хотя бы одной из этих операций будет не пустое единичное содержимое результирующего АБИ-фрагмента, то содержимое БСИ KxA×KyA×KzA и БСИ MxA×MyA×MzA объявляются взаимно-пересекающимися. ВВ позволяет за время, сравнимое с тактом управления ВВ:
- выделить каждую область Gi1÷Gi8 в виде отдельного АБИ с СПИ-адресом r;
- сформировать АБИ, имеющее СПИ-адрес d и представляющее собой результат повоксельного пересечения содержимого АБИ, имеющего СПИ-адрес r, с содержимым соответствующего ему АБИ-фрагмента А×А×А, принадлежащего БСИ МхА×МуА×MzA;
- осуществить анализ единичного содержимого АБИ, имеющего СПИ-адрес d, на «пусто/не пусто».
2.10.2. Анализ на совпадение геометрической формы одноцветного содержимого двух БСИ в устройстве
Анализ на совпадение геометрической формы единичного содержимого БСИ KxA×KyA×KzA с геометрической формой единичного содержимого БСИ MxA×МуА×MzA заключается в следующем:
1) из единичного содержимого исходных БСИ KxA×KyA×KzA и БСИ МхА×MyA×MzA выделяются их поверхностные (оболочечные) воксели в виде двух соответствующих 3D-БСИ: БСИ-зонда формата KxA×KyA×KzA и БСИ-сцены формата МхА×MyA×MzA;
2) вычисляется объем μp единичного содержимого БСИ-зонда с использованием высокопараллельного вычислителя 24 меры АБИ;
3) БСИ-зонд размещается внутри БСИ-сцены в точке с (xp,yp,zp), после чего каждый i-й АБИ-фрагмент А×А×А (AБИi), принадлежащий БСИ-зонду KxA×KyA×KzA пересечет, в общем случае, 8 соседних АБИ-фрагментов, принадлежащих БСИ-сцене MxA×МуА×MzA, которые отсекут от AБИi 8 областей Gi1÷Gi8 соответственно (фиг. 29-б);
4) выделяется область Gij (где j=1…7) в виде отдельного АБИ с СПИ-адресом rj;
5) формируется АБИij, имеющее СПИ-адрес dij и представляющее собой результат повоксельного пересечения содержимого АБИ, имеющего СПИ-адрес rij, с единичным содержимым соответствующего ему АБИ-фрагмента А×А×А, принадлежащего БСИ MxA×MyA×MzA;
6) вычисляется объем μij единичного содержимого АБИij;
7) процедуры п. 5 и п. 6 повторяются 8 раз (для Gi1÷Gi8 соответственно), после чего вычисляется объем области пересечения зонда с единичным содержимым сцены:
8) вычисляется  если δ≥δпорог, то сравниваемые геометрические формы считаются совпавшими, в противном случае - формы не совпадают.
если δ≥δпорог, то сравниваемые геометрические формы считаются совпавшими, в противном случае - формы не совпадают.
Реализация перемещения AMP по ранее вычисленной траектории
Результатом выполнения анализов ВА1 и ВА2 в видеанализаторах 8 является формирование одной или нескольких траекторий, обеспечивающих безопасное пересечение AMP текущей сцены. Траектория, найденная каждым видеоанализатором 8, представляет собой непрерывную ломаную линию, состоящую из прямых 3D отрезков, имеющих свое направление и длину. По окончанию ВА2 эти параметры ломаной траектории (коды направлений отрезков и коды значений длин этих отрезков) накапливаются в памяти блока 15 в виде последовательности двоичных чисел. Контроллер 7 последовательно извлекает из видеонализаторов 8 эту информацию обо всех безопасных траекториях и выбирает из них наиболее оптимальную согласно критерию оптимизации, указанному в программе функционирования AMP (например: наиболее короткую траекторию, самую безопасную траекторию и т.п.).
После этого указанные параметры выбранной траектории передаются контроллеру 1, который исследует траекторию, выбранную контроллером 7, на возможность ее физической реализации (с учетом динамических возможностей AMP, текущего ускорения и текущей скорости AMP) за время, оставшееся до окончания текущего УЦ AMP. Если решение отрицательное, контроллер 7 передает контроллеру 1 параметры следующей (наиболее близкой по оптимальности) траектории, и процедура проверки повторяется. Если решение положительное, контроллер 1 формирует последовательность сигналов управления на входы исполнительных органов AMP, обеспечивающих реализацию выбранной траектории. В результате, хотя нет абсолютного совпадения между расчетной траекторией и траекторией, реализованной AMP физически, вторая траектория должна максимально возможным образом повторять расчетную траекторию (фиг. 18).
После выхода AMP в последнюю точку расчетного участка контроллер 1 переходит к выполнению следующего УЦ AMP, для чего подает контроллеру 7 запрос (команду) на выполнение датчиками 10 следующего этапа сканирования окружающего пространства.
Наличие в заявленном устройстве нескольких навигационных видеоанализаторов, функционирующих одновременно и независимо друг от друга, и способных с высокой скоростью осуществлять
- ввод сенсорной информации;
- синтез 3D моделей окружающих объектов и текущей модели самого AMP,
- анализ пространственных сцен,
позволяют AMP, оборудованному данным устройством, легко ориентироваться в пространстве, оперативно сверять свое текущее положение на маршруте движения, строить собственные двумерные и трехмерные навигационные карты, выбирать наиболее оптимальные маршруты перемещения AMP. Передача функций управления исполнительными органами AMP дополнительно введенному контроллеру 1 позволило освободить ресурсы процессорной матрицы для сокращения времени анализа наблюдаемых сцен, тем самым повысить уровень адаптивности AMP к изменениям геометрии окружающей среды.
Таким образом, по сравнению с прототипом заявленное устройство позволяет расширить функциональные возможности устройства, повысить приспособляемость AMP к окружающей среде, увеличить скорость, надежность и маневренность. Высокое быстродействие и относительно небольшие габариты устройства дают возможность создать на его основе относительно недорогие очувствленные роботы с чрезвычайно высокой степенью автономности, что, в свою очередь, позволит автоматизировать сферы человеческой деятельности, в настоящее время не подлежащие автоматизации.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент на изобретение №2187832.
2. Уитби Б. Искусственный интеллект: реальна ли Матрица. М.: ФАИР-ПРЕСС, 2004. (стр. 98-103).
3. Алексеев Н. Кремниевая эволюция // ComputerBild. - 2011. - №22. - С. 80-85.
4. Боресков А.В., Харламов А.А. Основы работы с технологией CUDA. - М.: ДМК-Пресс, 2010. - 232 с.
5. Бимаков В.А. О высокопроизводительной обработке плоских и пространственных сцен. - Устинов, 1986. 68 с., деп. в ЦНИИТЭИ приборостроения, №3598-пр.
6. Бимаков В.А. Устройство для параллельной обработки трехмерных сцен. // Авт. св. СССР №1456965, Бюл. №5 от 07.02.1989.
7. Бимаков В.А. Устройство для параллельной обработки трехмерных сцен // Авт. св. СССР №1612307. - SU 1612307 А1. - 1990.
8. Бимаков В.А. Устройство обработки изображений // Авт. св. СССР №1817108. - SU 1817108 А1. - 1993.
9. Бимаков В.А. Устройство для параллельной обработки трехмерных сцен // Авт. св. СССР №1817109. - SU 1817109 А1. - 1993.
10. Бимаков В.А., Бимаков Е.В. Устройство обработки двухмерных и трехмерных изображений // Патент РФ №2289161. - 2006. - Бюл. №34.
11. Бимаков В.А., Бимаков Е.В. Устройство обработки двухмерных и трехмерных изображений // Патент РФ №2376637. - 2009. Бюл. - №35.
12. Бимаков В.А., Бимаков Е.В. Устройство управления автономным роботом // Патент РФ №2424105. - 2011. - Бюл. №20.
13. Бимаков В.А., Бимаков Е.В. Принципы построения и функционирования устройств для высокоскоростной обработки n-мерных пиксельных геометрических моделей // Информационные технологии. - 2012. - №6. - С. 44-49.
14. Бимаков Е.В., Касимов Т.Р. Разработка системы управления автономным мобильным роботом на базе воксельного вычислителя. Журнал «Труды МАИ». - №74. - 2014 г.
15. Бимаков Е.В. Метод виртуального зондирования сцены на базе воксельной технологии обработки сцен // Информационные технологии. - 2016. - №11. - С. 827-835.
16. Бимаков Е.В. Автоматическое исследование сцены методом виртуального зондирования (тезисы). / Сборник материалов III международной научно-практической конференции «Виртуальное моделирование, прототипирование и промышленный дизайн - 2016». - Тамбов: ТГТУ. - 2016. - Том 1. С. 357-361
17. Бимаков Е.В. Технология анализа геометрической модели для высокоскоростной автоматической обработки сцены // Сборник материалов XII международной научно-техн. конференции «Современные проблемы радиотехники и телекоммуникаций». - Севастополь: СГУ, 2016. - С. 139.
18. Бимаков Е.В. «Программа для расчета области пересечения двух кубических вокселей». Свидетельство о гос. рег. программы для ЭВМ №2016663747 от 15.12.2016 г.
19. Бимаков Е.В. «Программа для поиска траектории обхода препятствий методом виртуального зондирования сцены на базе воксельной технологии обработки». Свидетельство о гос. рег. программы для ЭВМ №2016663673 от 13.12.2016 г.
20. Бимаков В.А., Бимаков Е.В. «Применение воксельной аппаратно-программной технологии обработки сцен для повышения адаптивности автономных мобильных роботов» Доклад на научном семинаре «Проблемы управления автономными робототехническими комплексами» ИЛУ им. В.А.Трапезникова РАН, 19.06.2017. http://www.ipu.ru/smart
21. Бимаков Е.В., Бимаков В.А. Проект «Разработка высокоскоростного бортового навигационного видеоанализатора на базе воксельной технологии обработки сцен». Проект удостоен 1-й премии (приказ Министра обороны РФ №788 от 18.12.2017 г.) во «Всероссийском конкурсе по поиску научных, инновационных, производственных групп или коллективов, способных к эффективной реализации перспективных проектов в интересах Вооруженных Сил Российской федерации» 15.08.2017 г.
22. Поджио Т. Зрение человека и технические системы видения. Журнал «В мире науки». 1984 №6, стр. 58-69.
23. Хорн Б.К. Зрение роботов. М.: Мир, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| Способ измерения формы и размеров частей тела человека, способ поиска на изображении плоского объекта известной формы и размеров, способ отделения на изображении части тела человека от фона | 2018 |
|
RU2684436C1 |
| Устройство для параллельной обработки трехмерных сцен | 1988 |
|
SU1612307A2 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
| СПОСОБ ВИРТУАЛЬНОЙ СИМУЛЯЦИИ РЕТРОГРАДНОЙ ИНТРАРЕНАЛЬНОЙ ХИРУРГИИ ДЛЯ ЛЕЧЕНИЯ МОЧЕКАМЕННОЙ БОЛЕЗНИ, ПРИМЕНЯЕМЫЙ ПРИ ОБУЧЕНИИ НАВЫКАМ ЭНДОУРОЛОГИЧЕСКИХ МАНИПУЛЯЦИЙ И ПРИ ПЛАНИРОВАНИИ ОПЕРАЦИЙ С ИСПОЛЬЗОВАНИЕМ ГИБКОГО УРЕТЕРОСКОПА | 2022 |
|
RU2802129C1 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ УЗЛОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237284C2 |
| Способ и электронное устройство для обнаружения трехмерных объектов с помощью нейронных сетей | 2021 |
|
RU2776814C1 |
| ВИЗУАЛИЗАЦИЯ РЕКОНСТРУКЦИИ 3D-СЦЕНЫ С ИСПОЛЬЗОВАНИЕМ СЕМАНТИЧЕСКОЙ РЕГУЛЯРИЗАЦИИ НОРМАЛЕЙ TSDF ПРИ ОБУЧЕНИИ НЕЙРОННОЙ СЕТИ | 2023 |
|
RU2825722C1 |
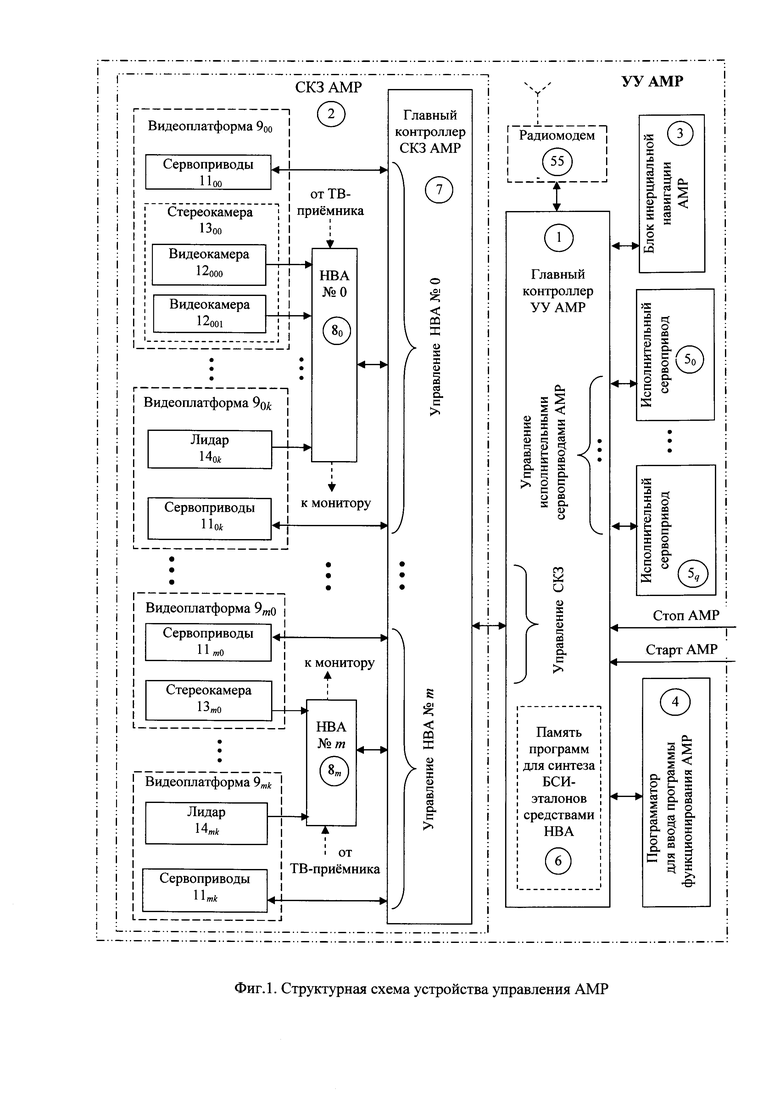
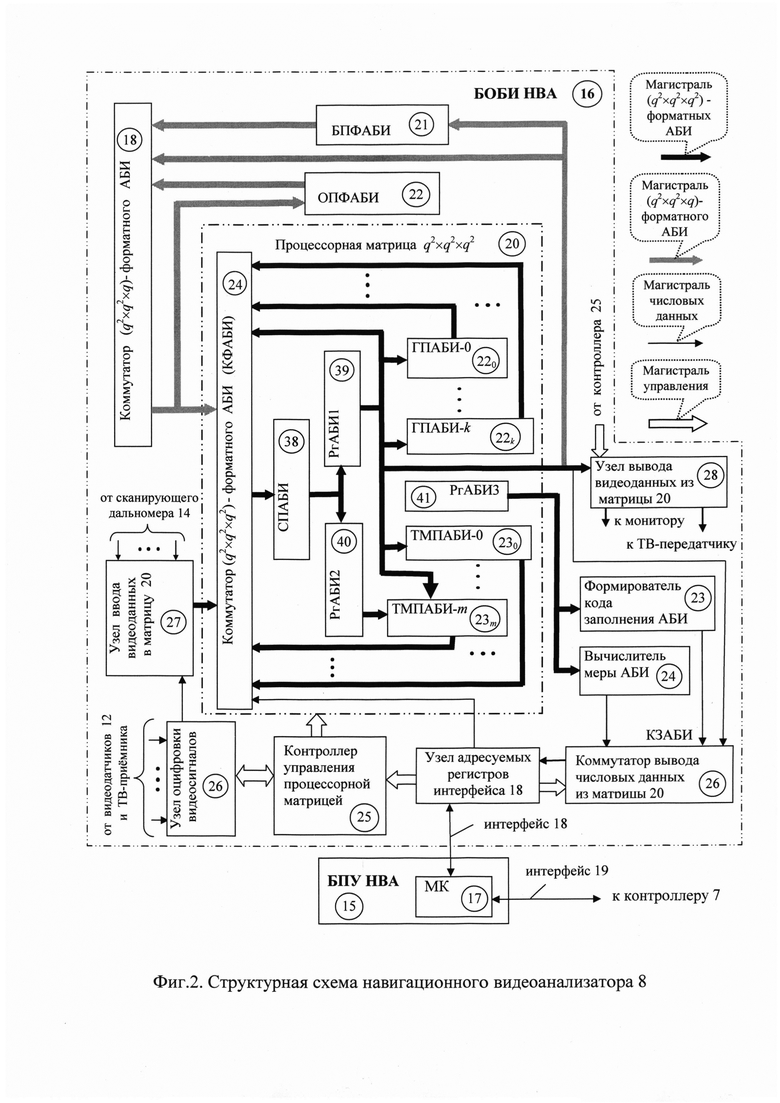
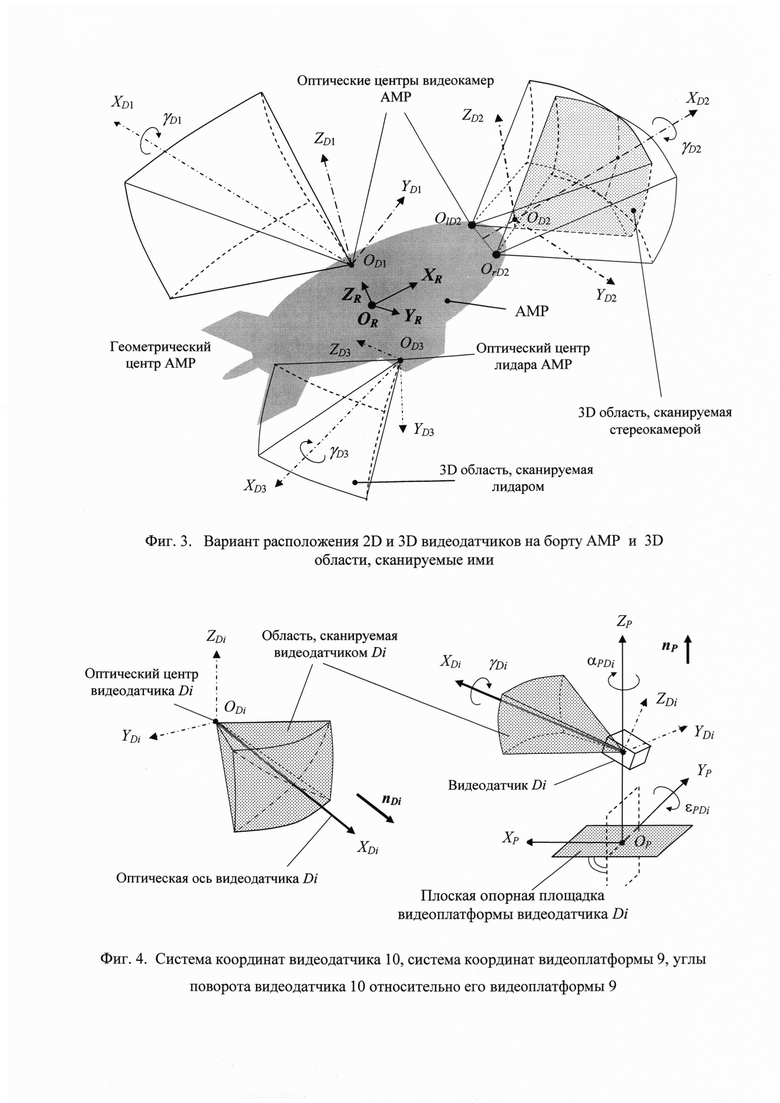
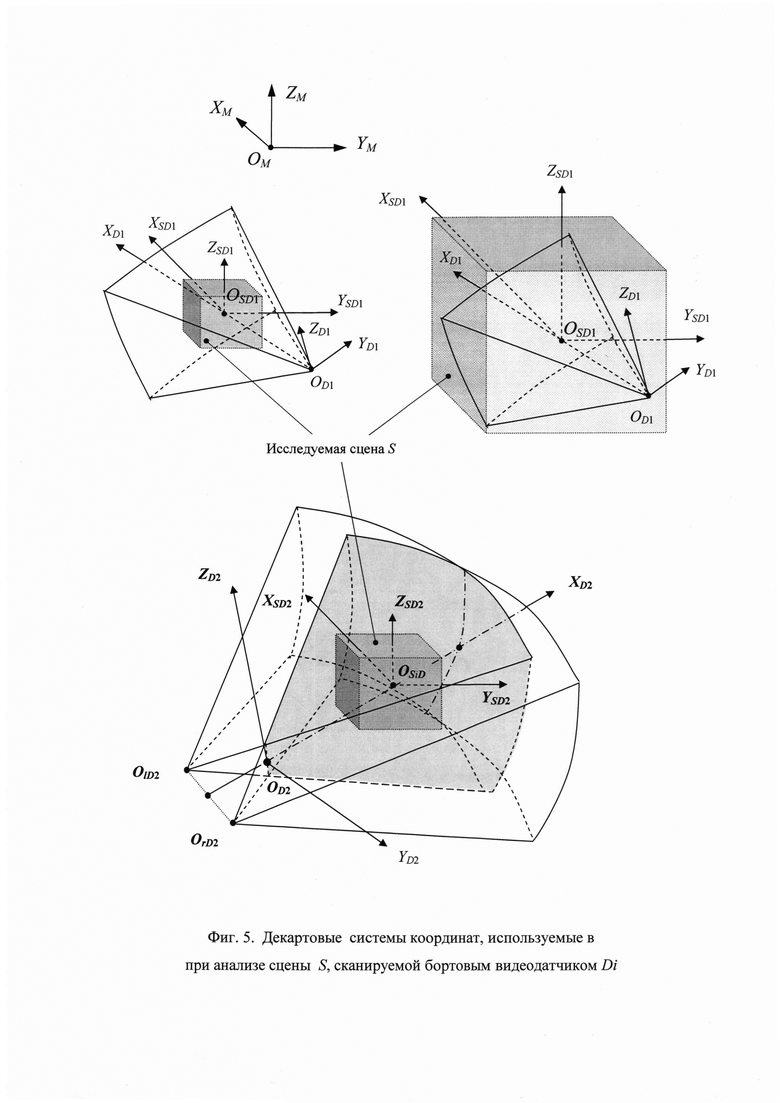
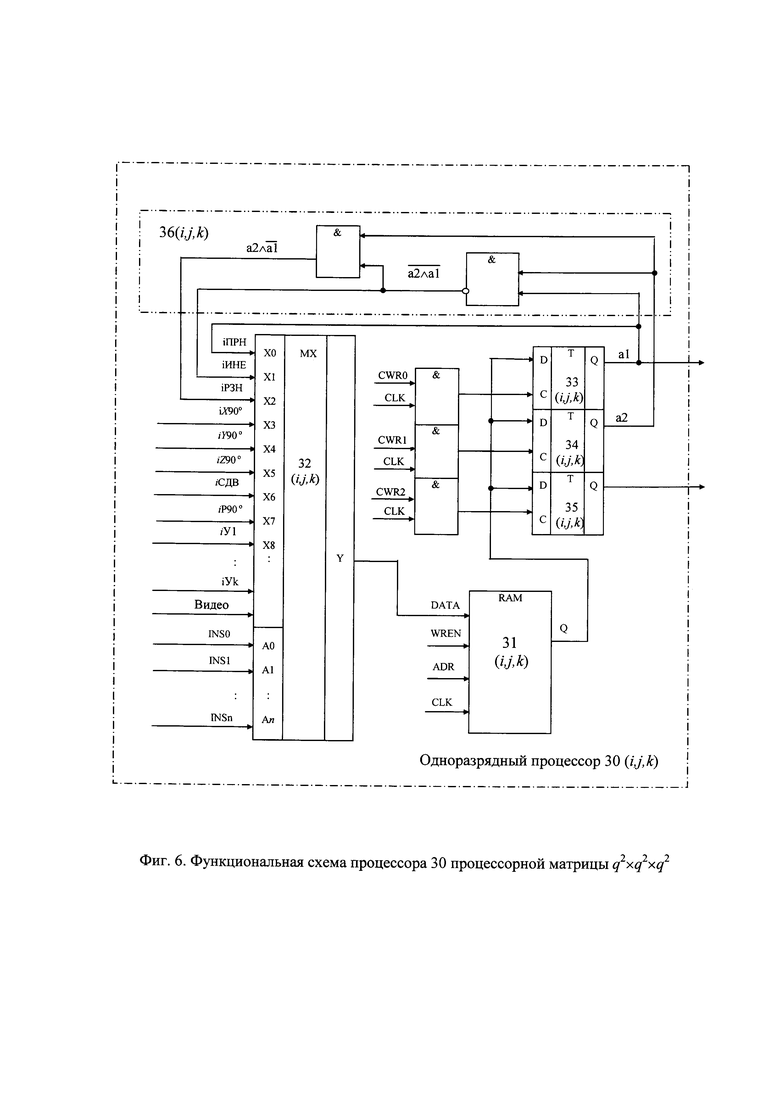
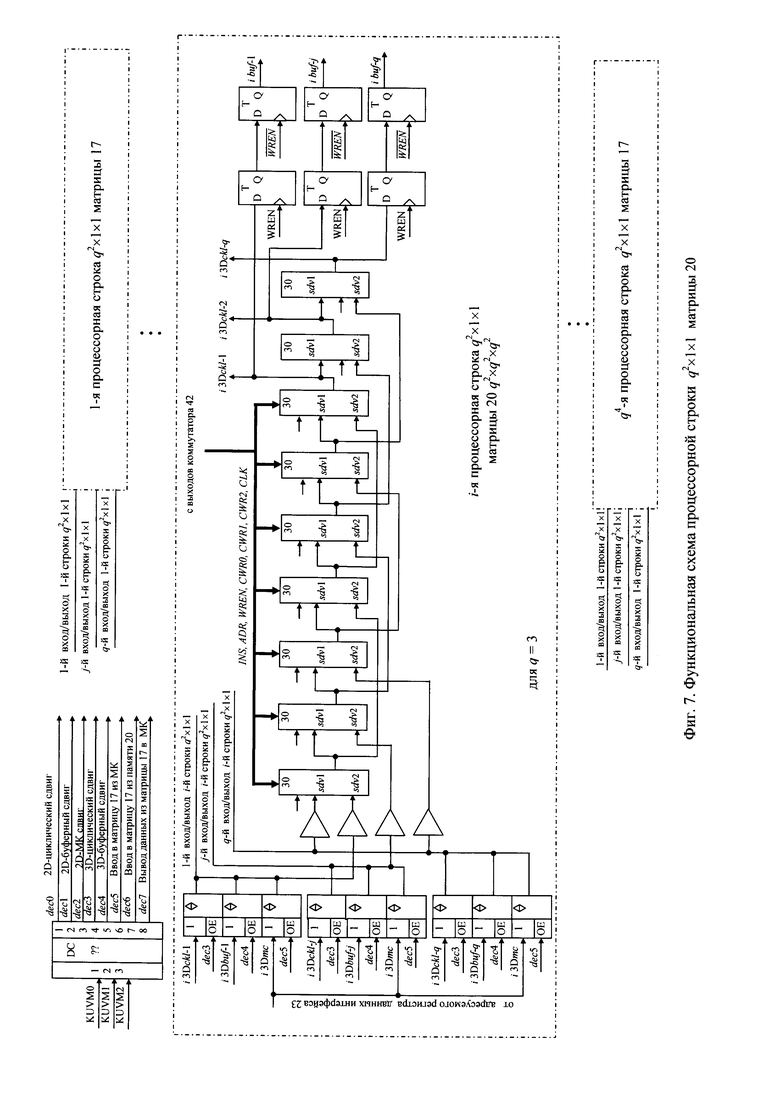
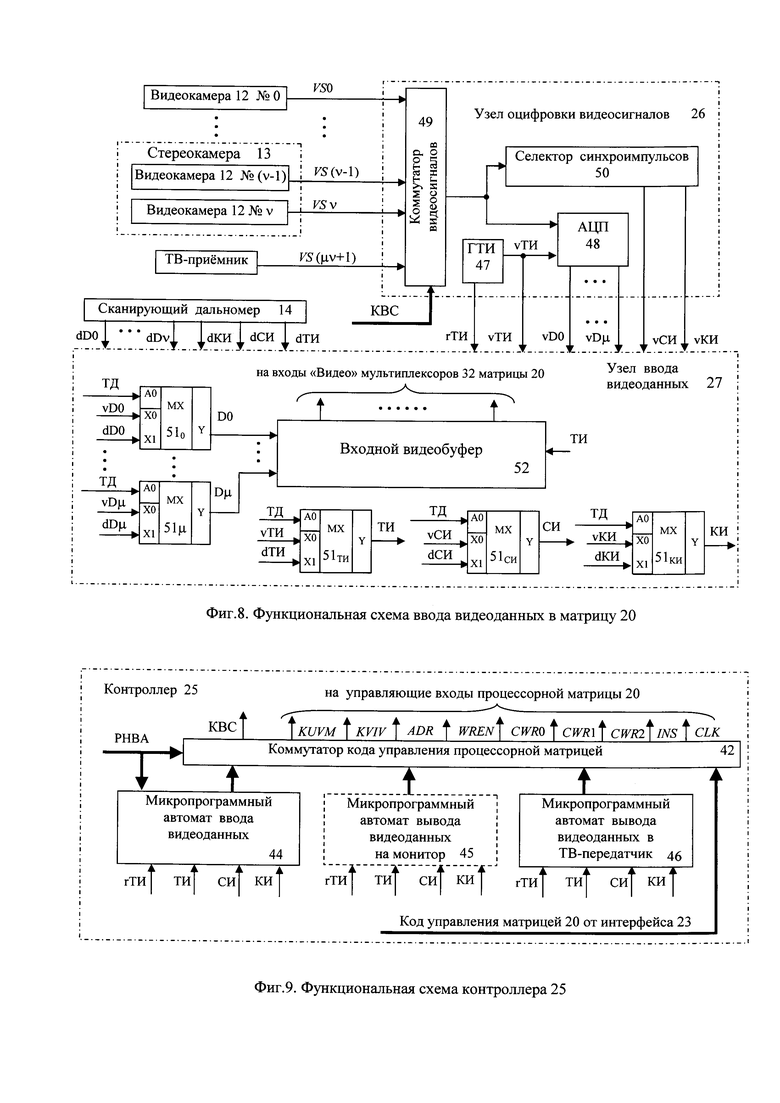
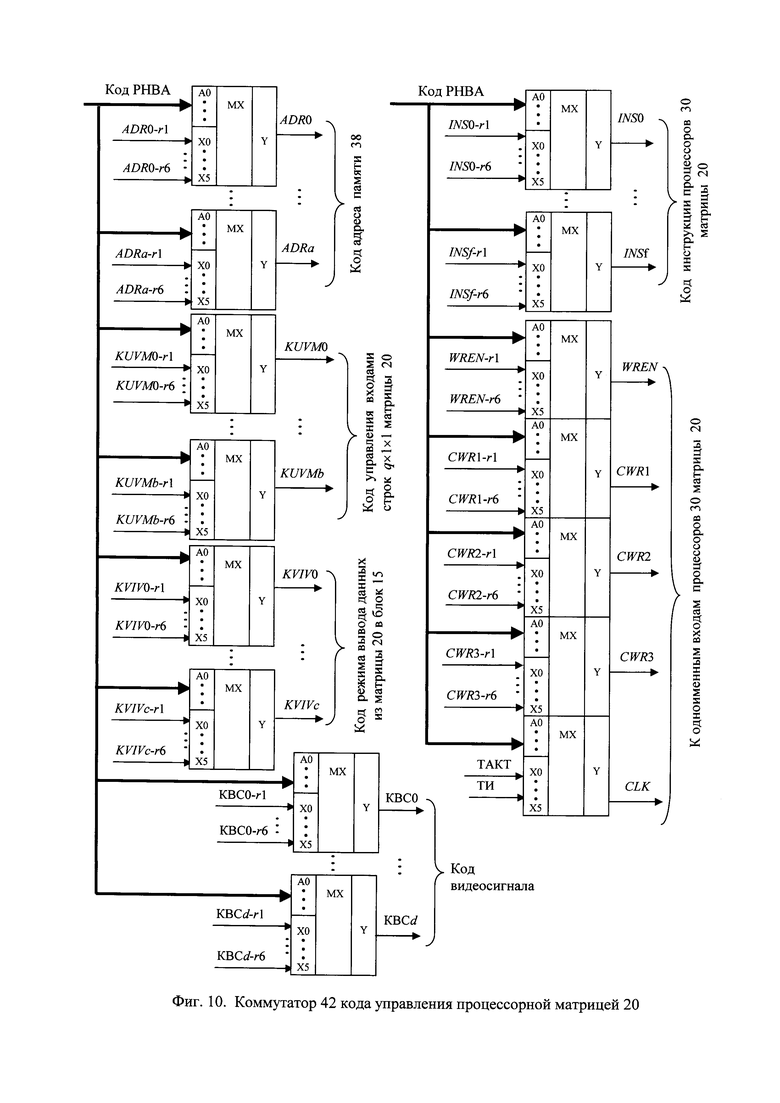
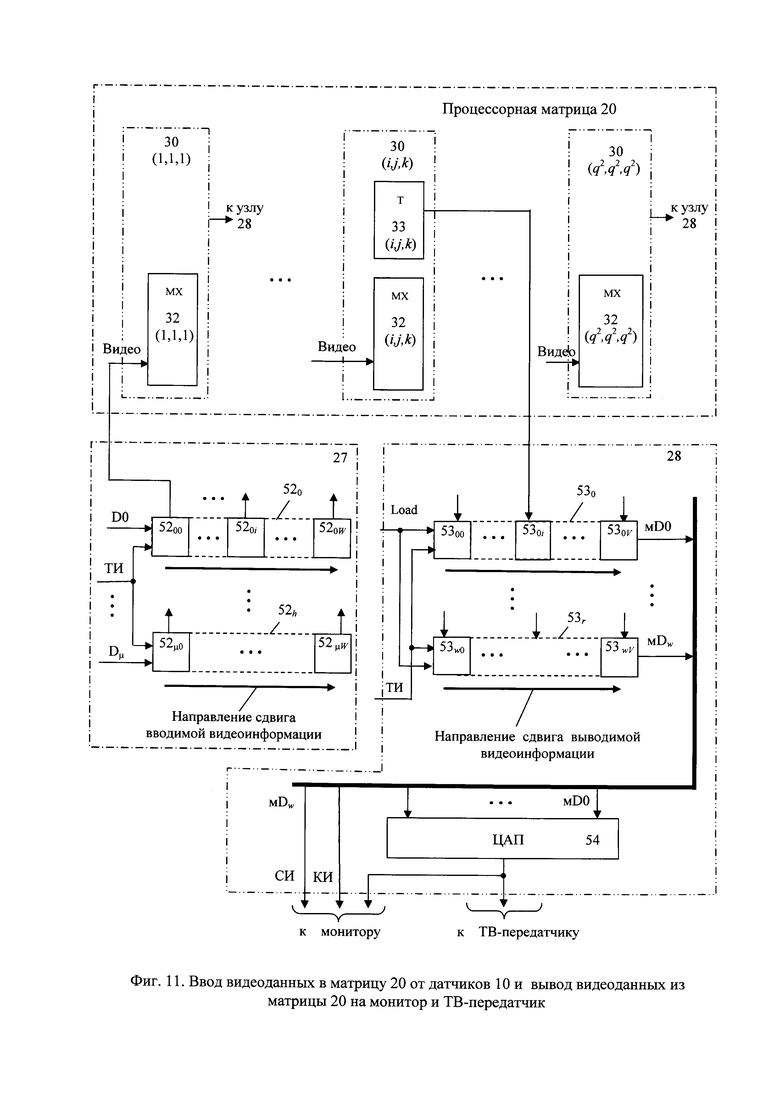
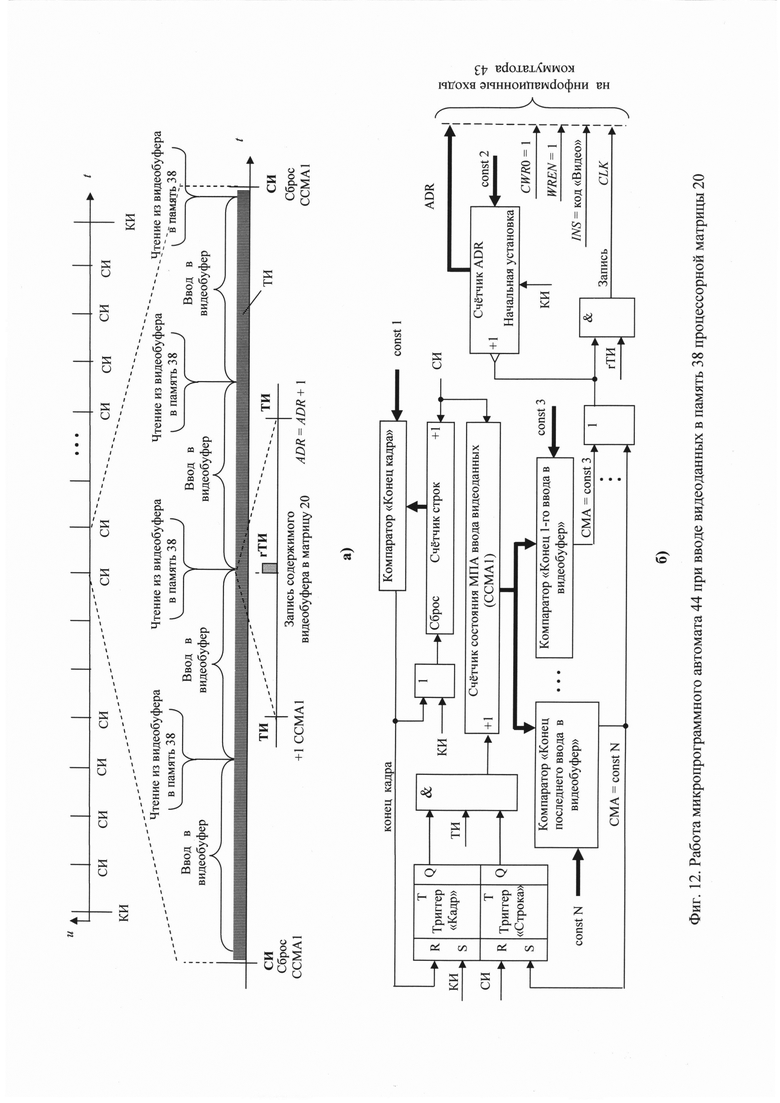
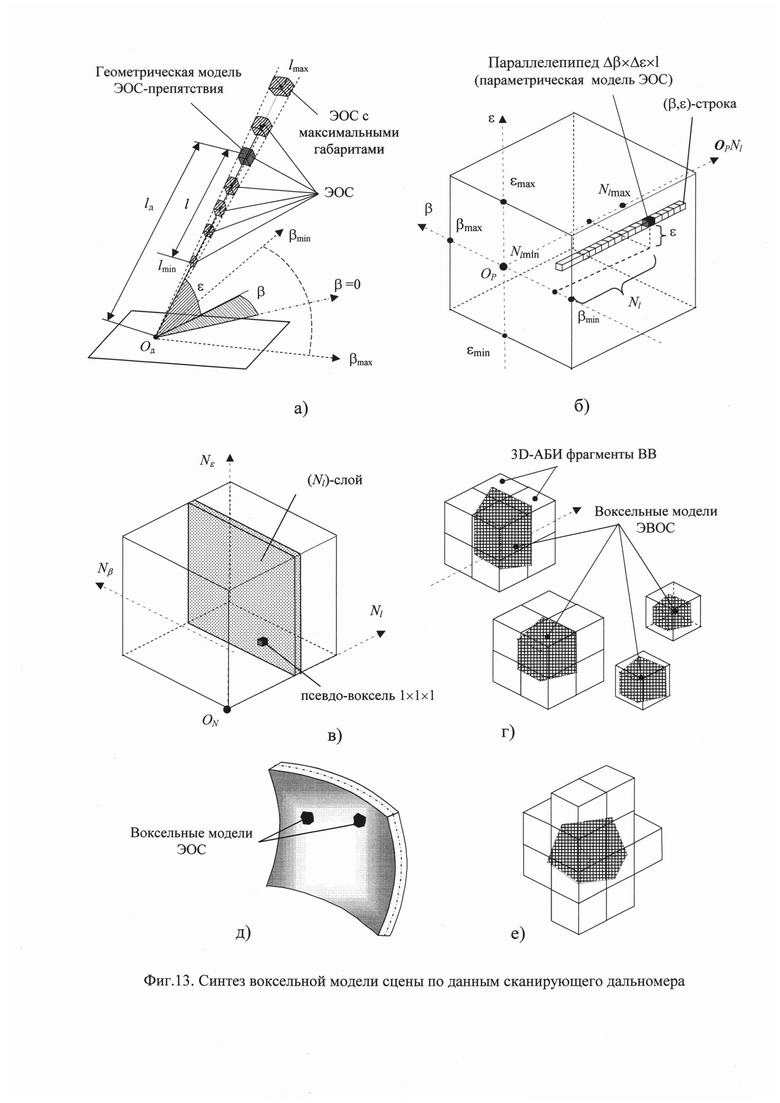
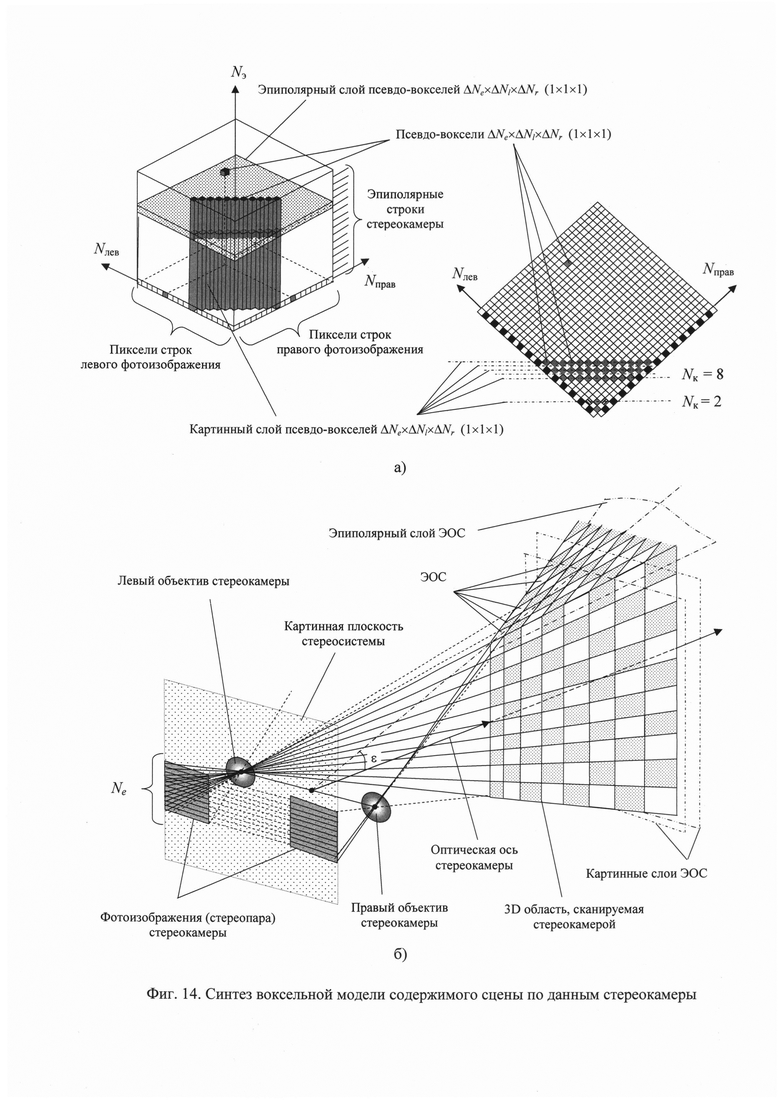
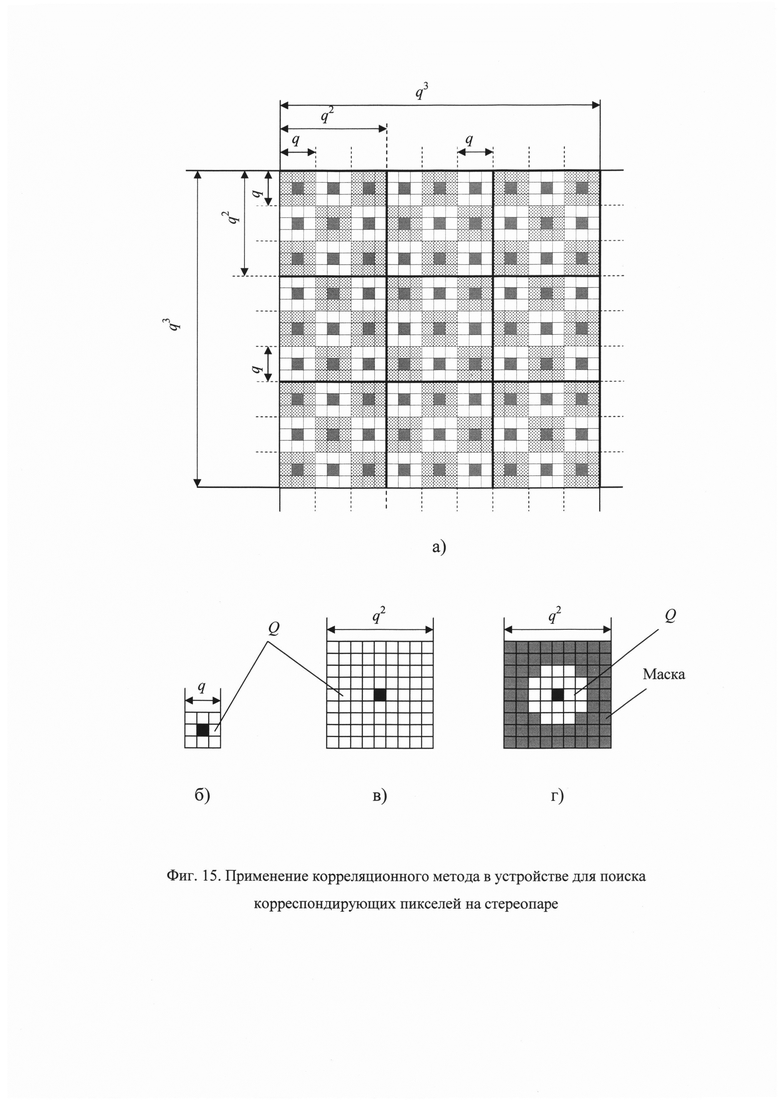
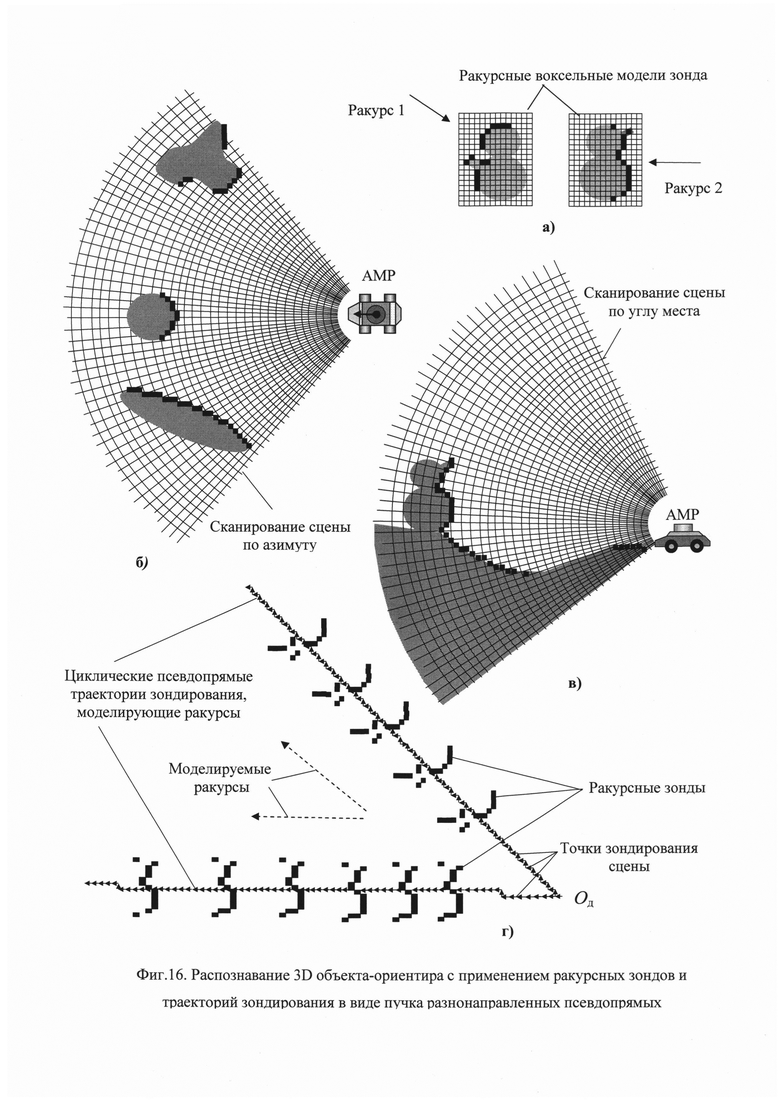
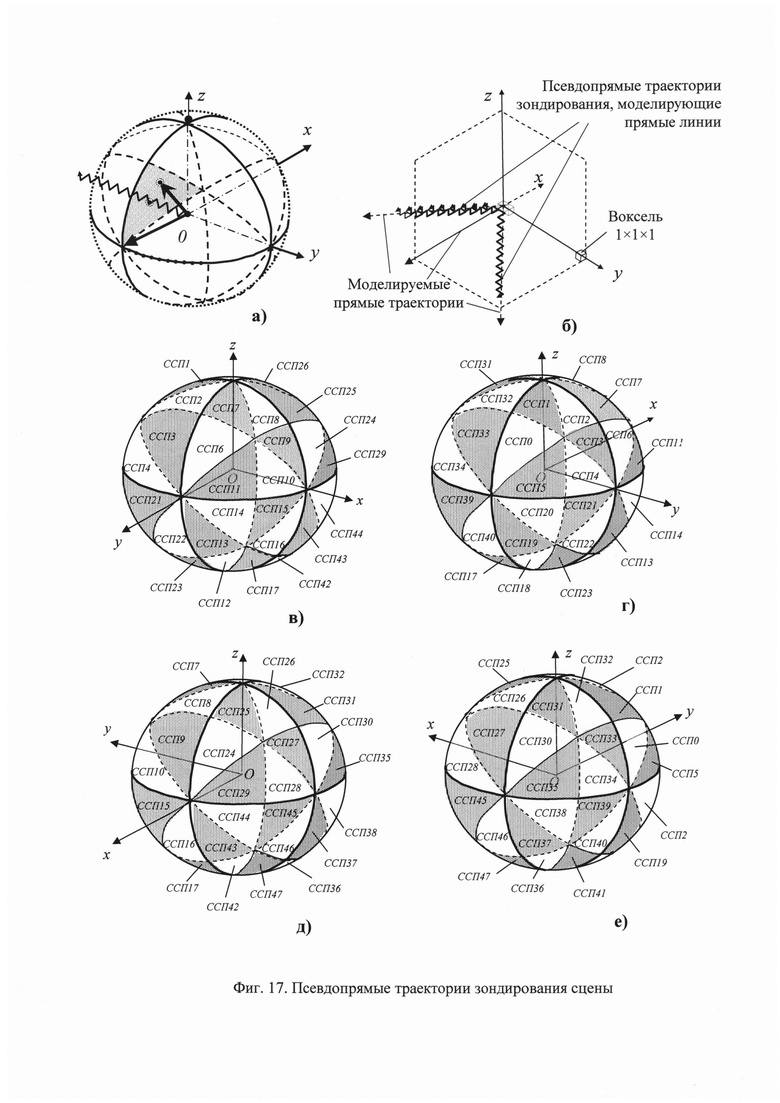
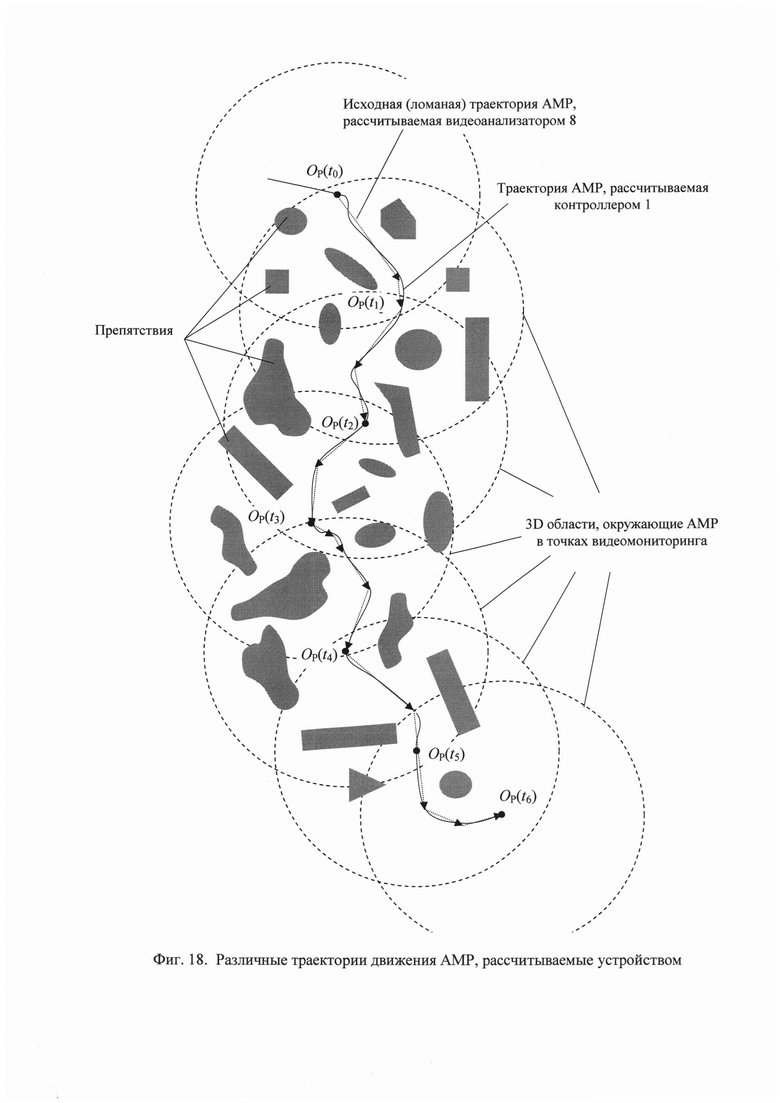
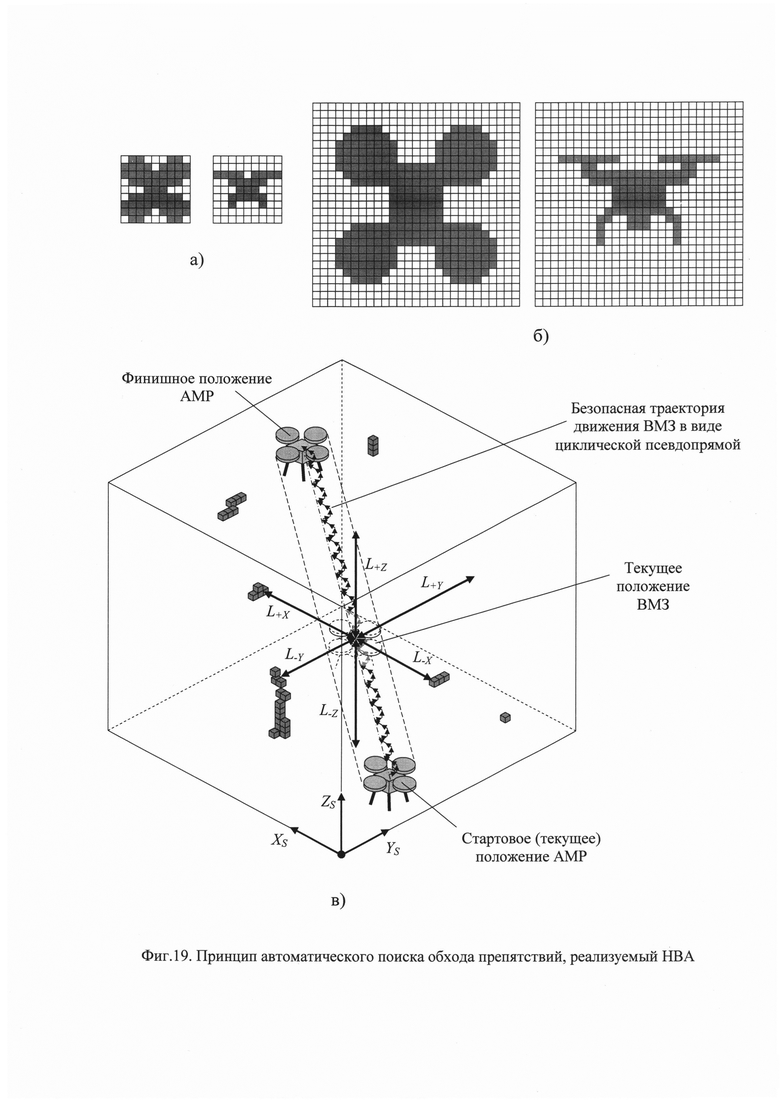
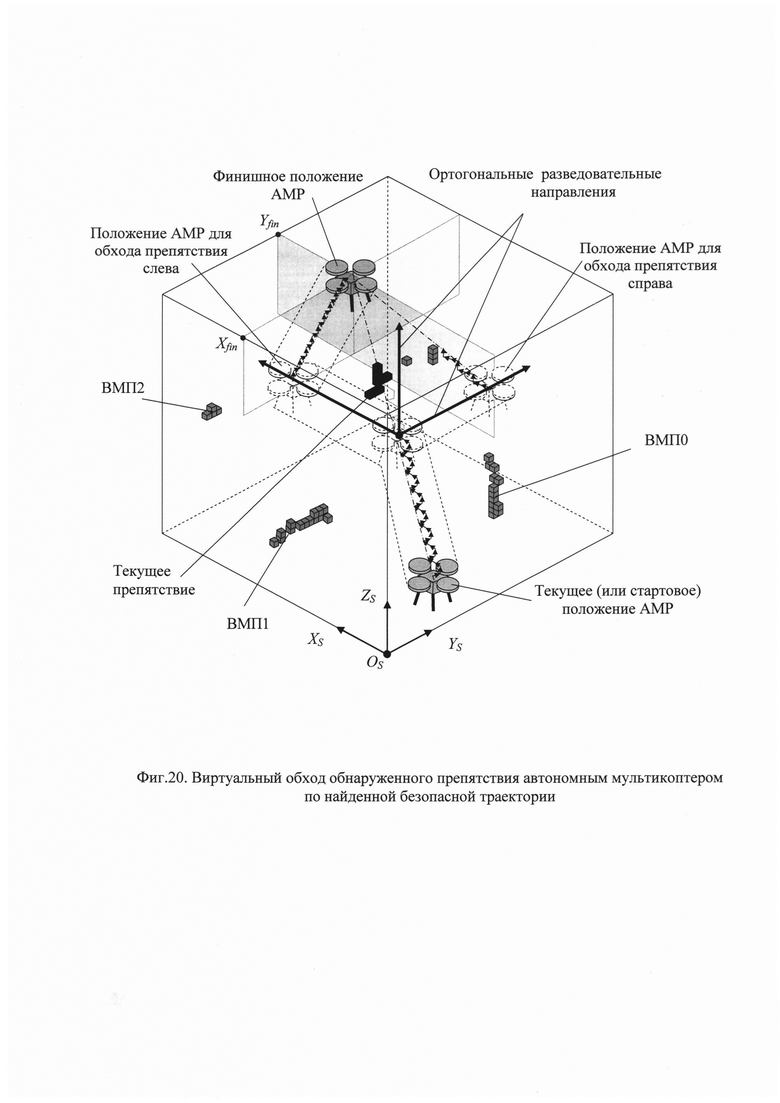
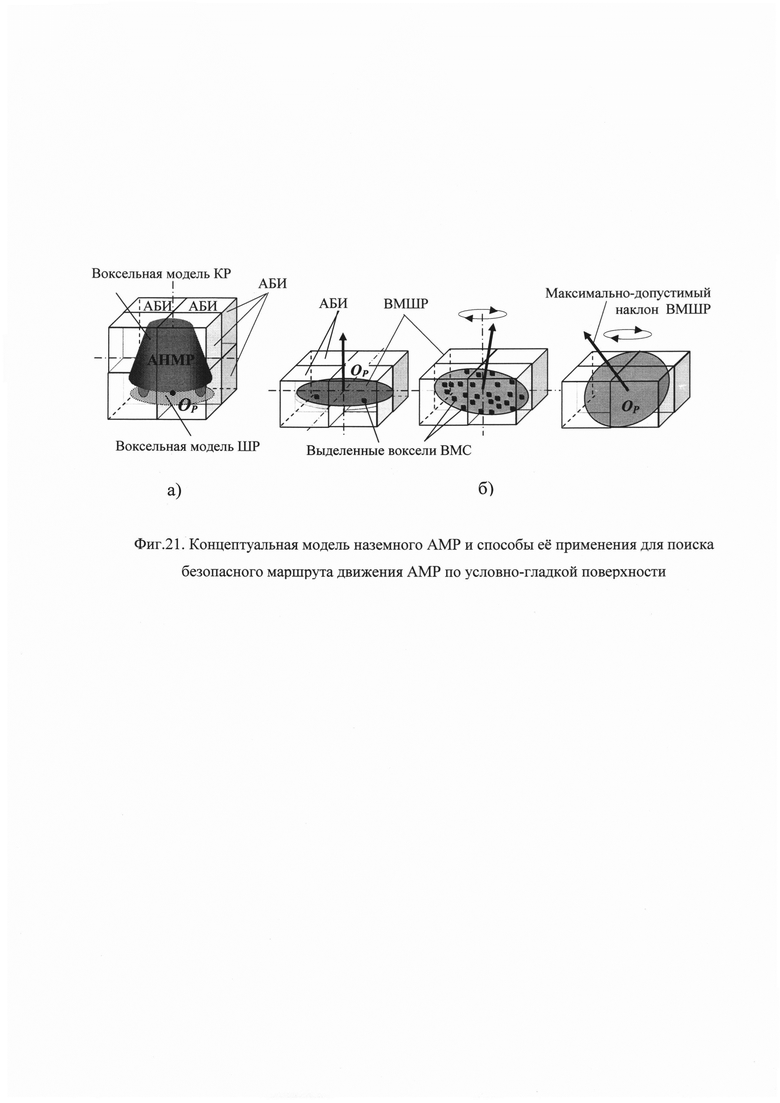
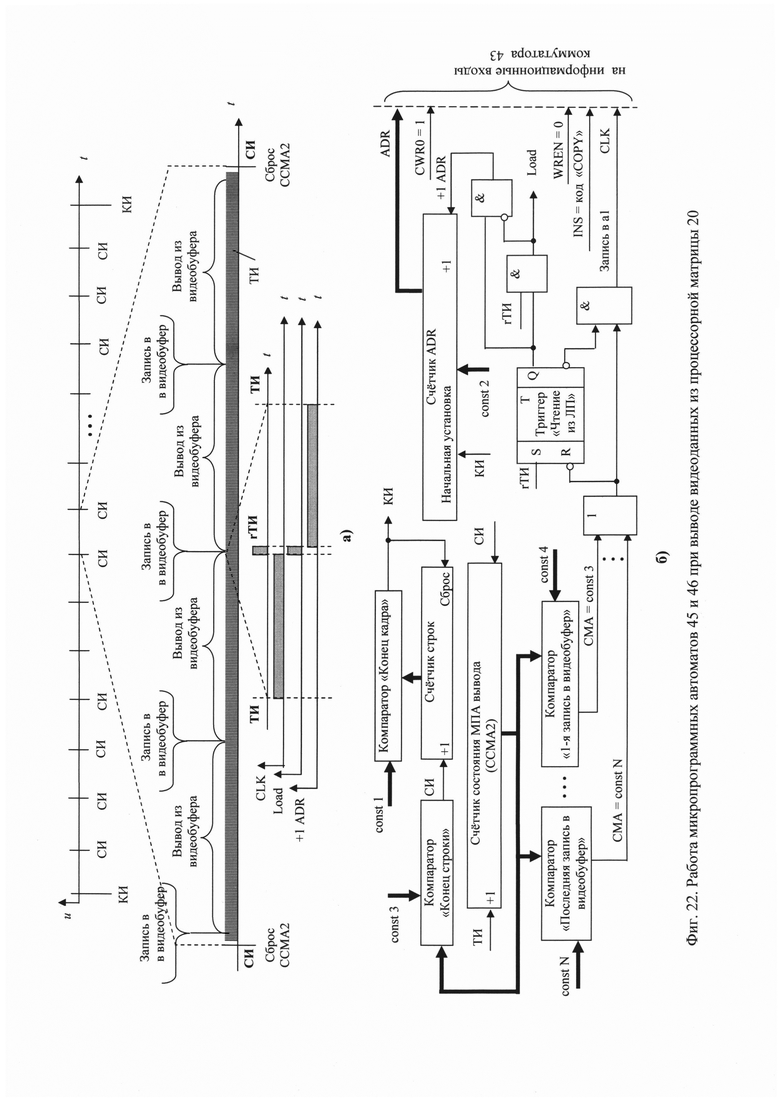
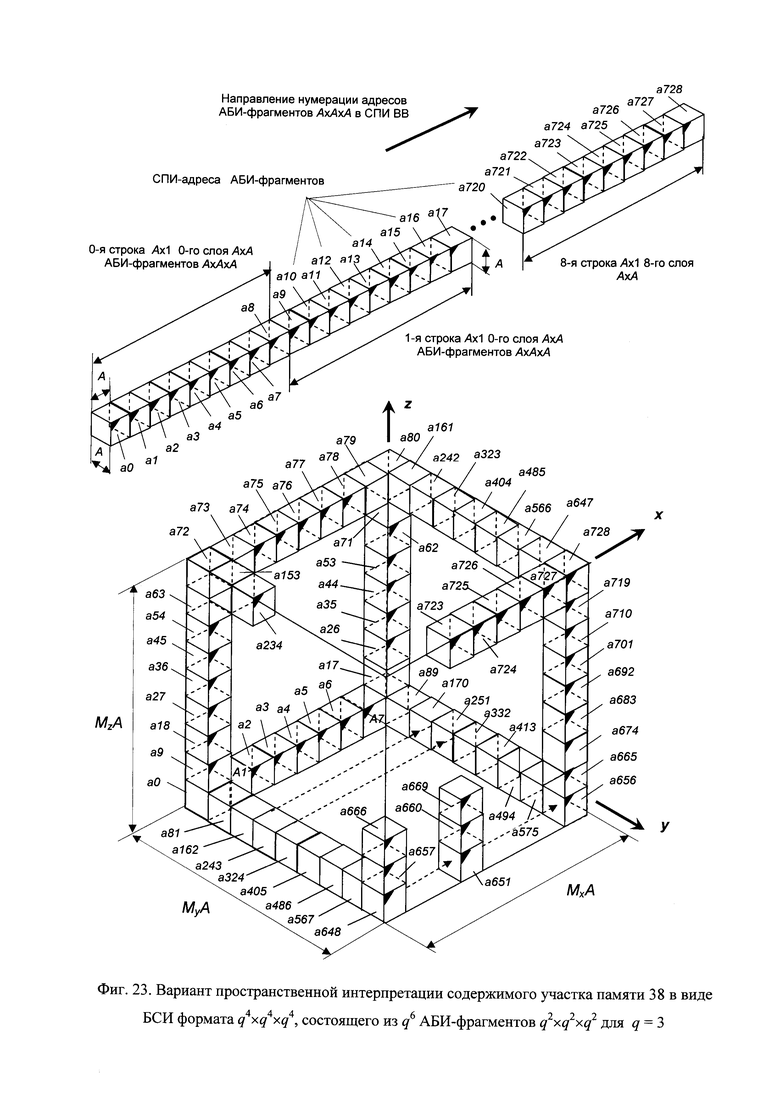
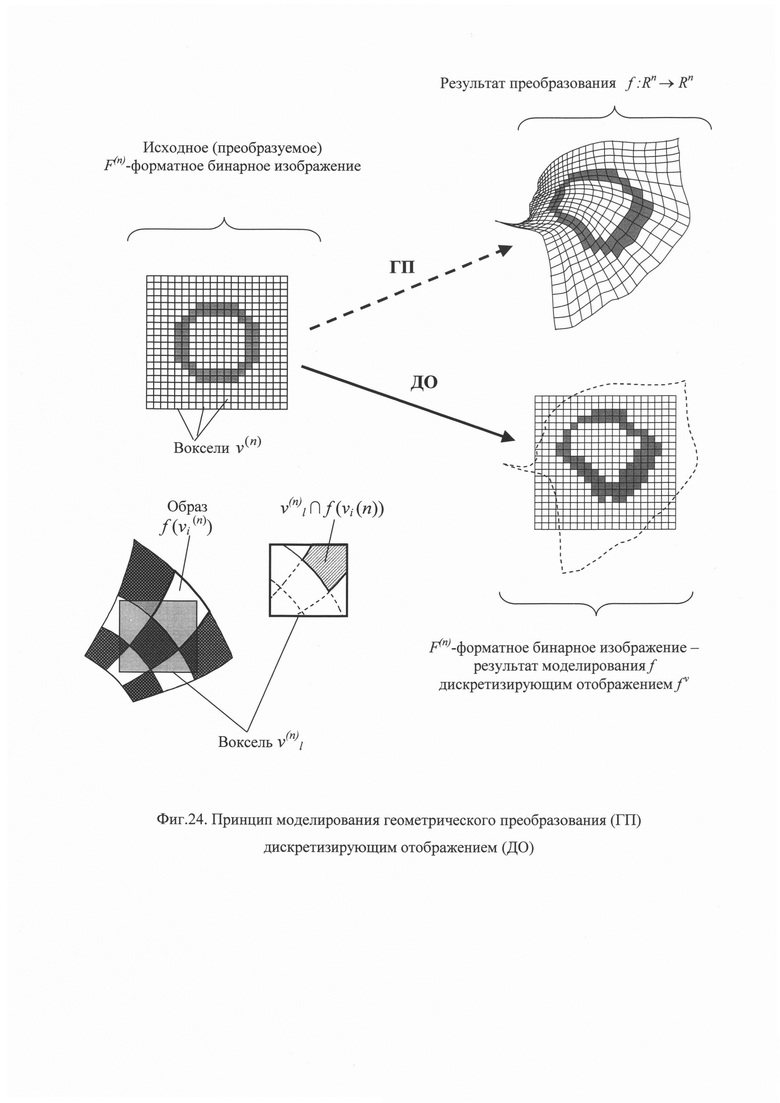
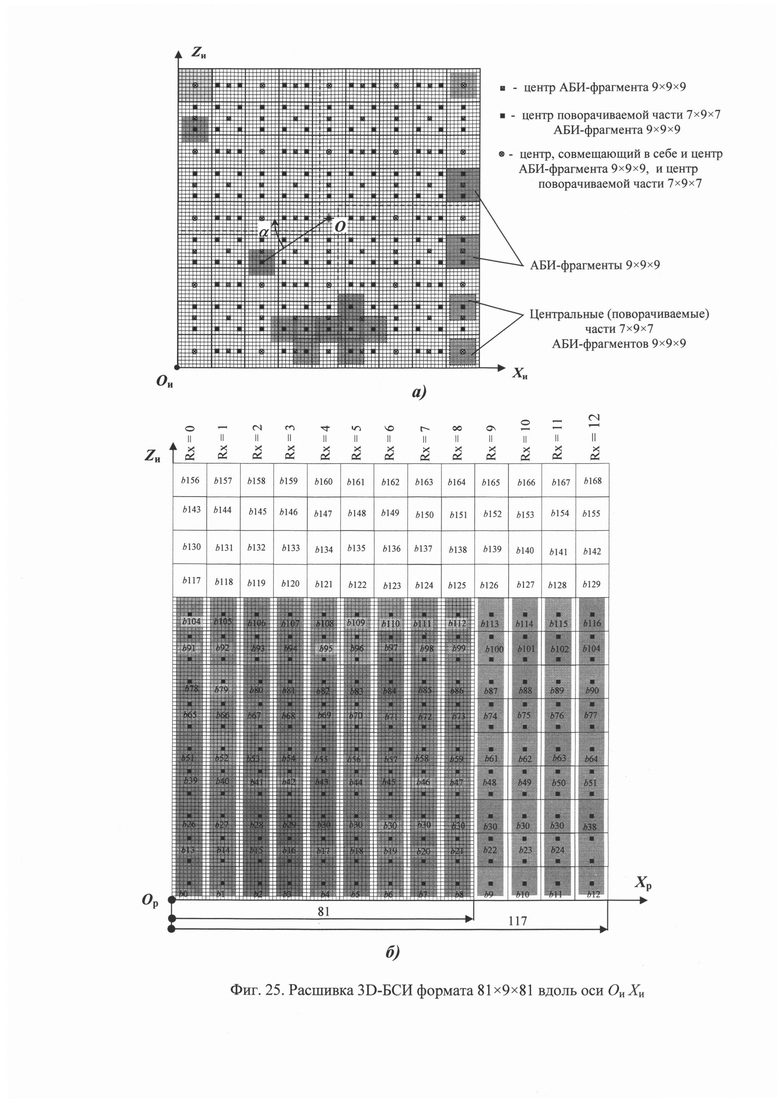
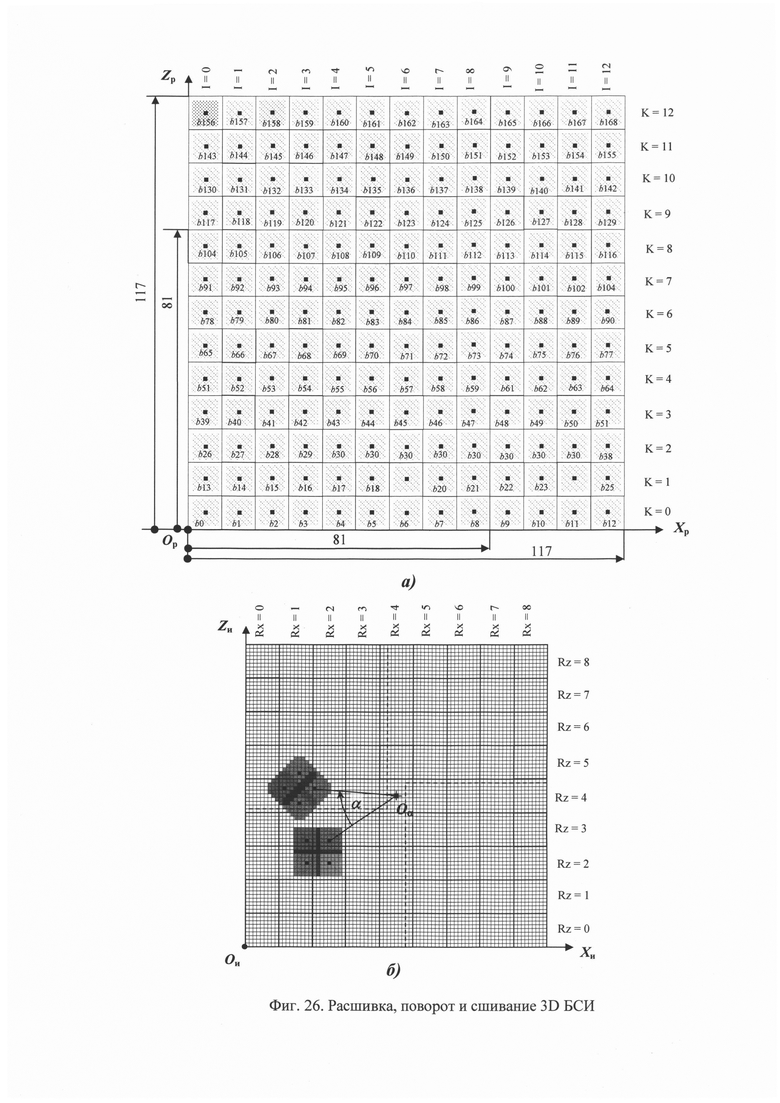
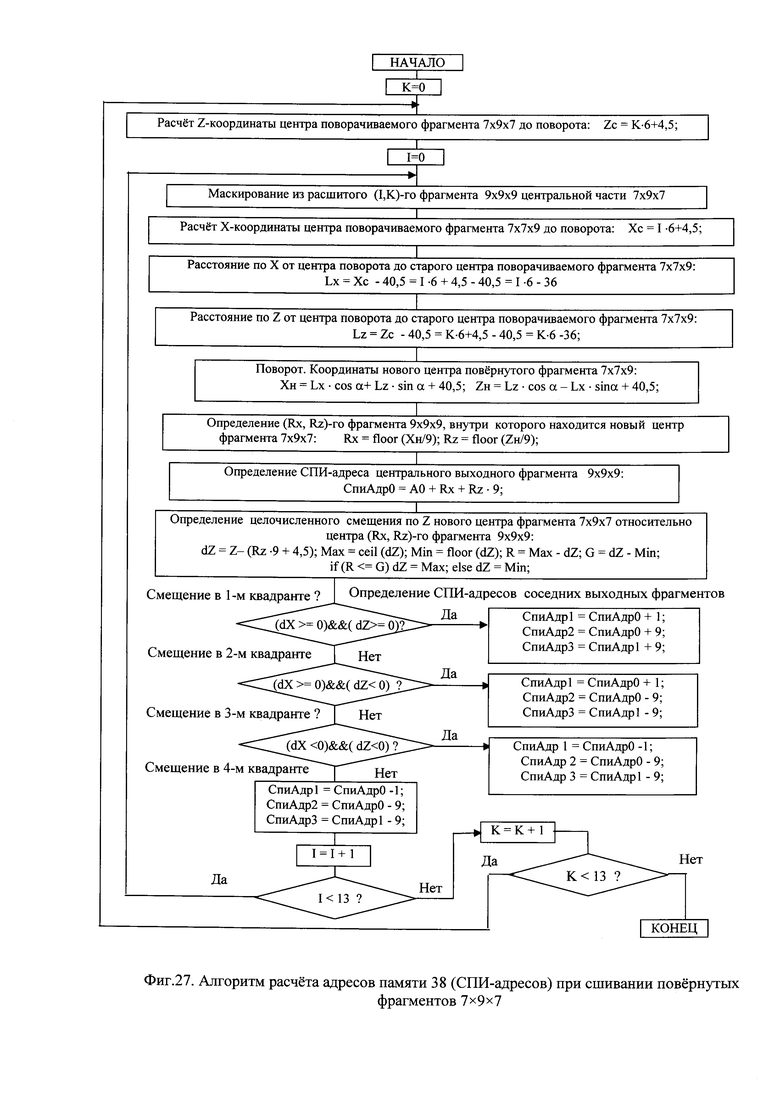
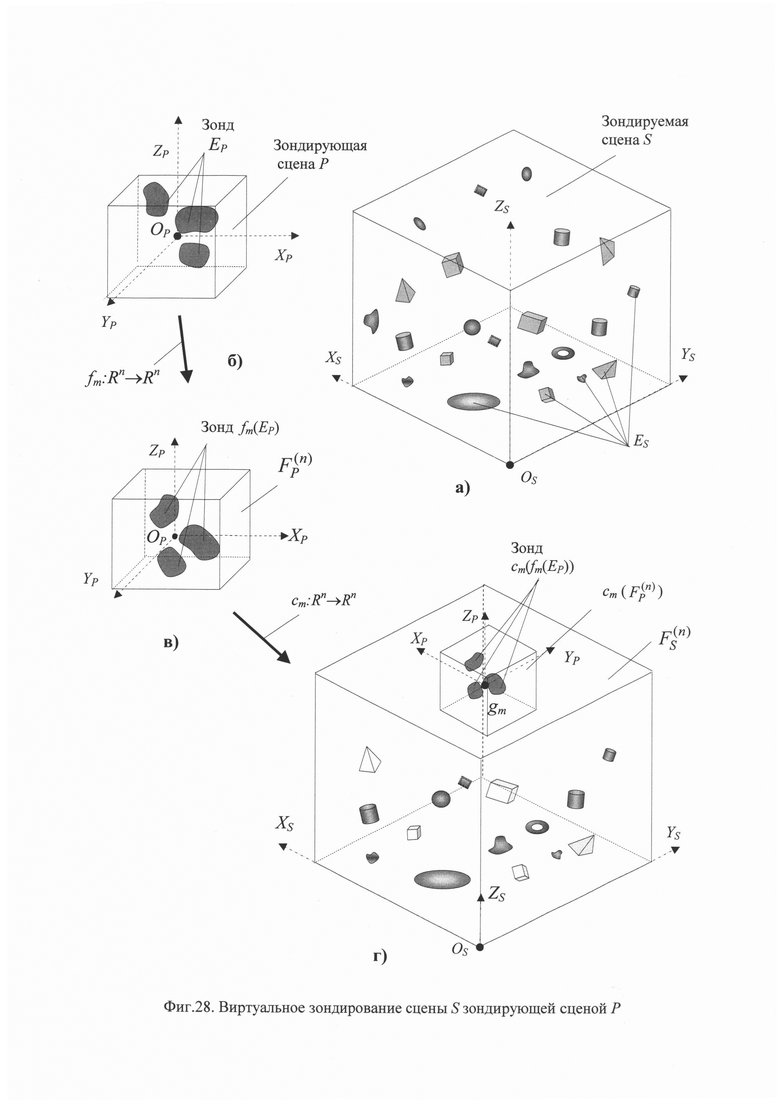
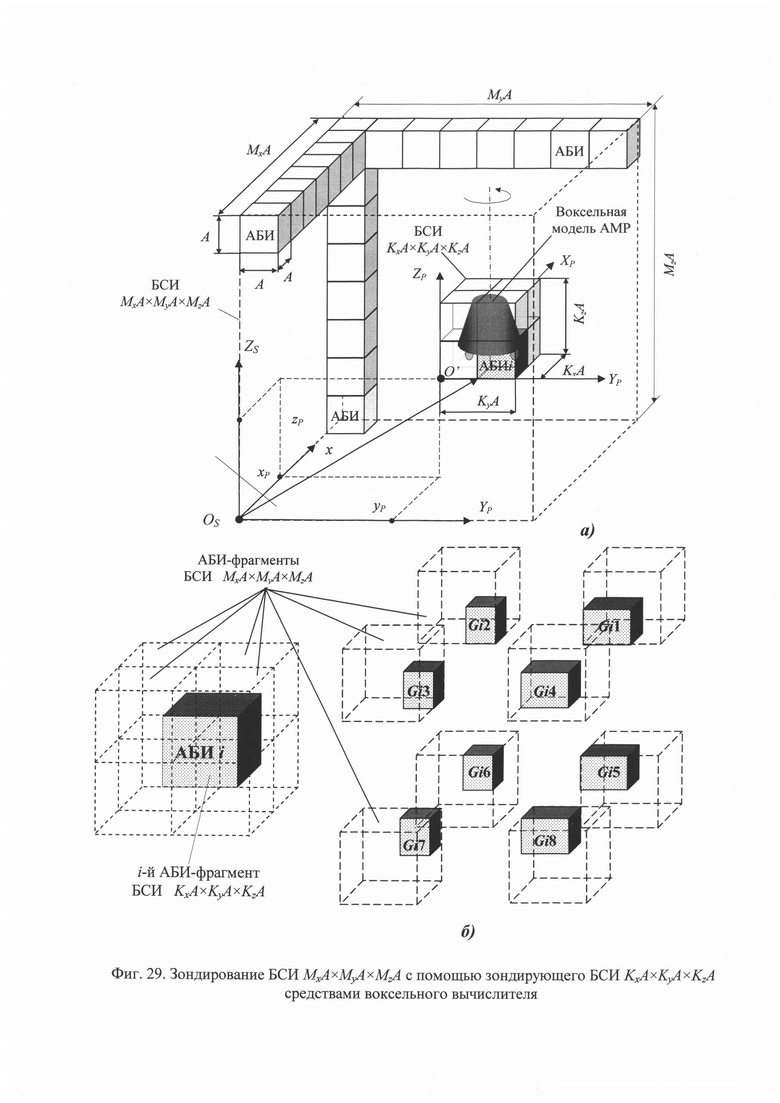
Изобретение относится к области робототехники, предназначено для управления высокоадаптивными и высокоманевренными автономными мобильными роботами (AMP) различного назначения. Изобретение позволяет расширить функциональные возможности устройства, повысить приспособляемость AMP к окружающей среде, увеличить скорость, надежность и маневренность AMP, создать очувствленных роботов с чрезвычайно высокой степенью автономности, что позволит автоматизировать сферы человеческой деятельности, в настоящее время не подлежащие автоматизации. 29 ил.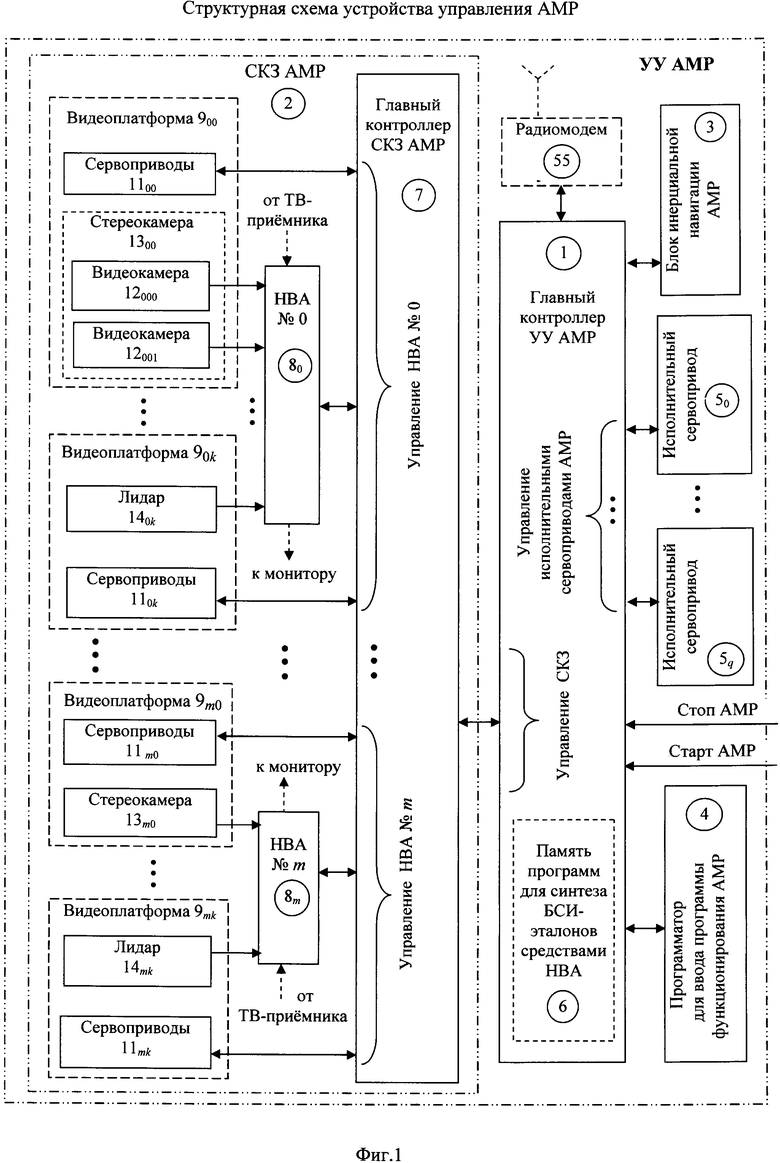
Устройство для управления высокоадаптивным автономным мобильным роботом (AMP), содержащее блок программного управления, блок (16) высокопараллельной обработки двумерных адресуемых бинарных изображений (2D-АБИ) формата q3×q3 и трехмерных адресуемых бинарных изображений (3D-АБИ) формата q2×q2×q2, где q=2, 3, 4 … - число целое, содержащий процессорную матрицу (20) формата q2×q2×q2 (ПМ) однотипных одноразрядных процессоров (30), между этими процессорами (30) и квадратными пикселями 1×1 адресуемого бинарного изображения (2D-АБИ) квадратного формата q3×q3 имеется взаимно-однозначное соответствие, между процессорами (30) и кубическими вокселями 1×1×1 адресуемого бинарного изображения кубического формата q2×q2×q2 имеется взаимно однозначное соответствие, в каждом процессоре (30) имеется многовходовой мультиплексор (32), при этом один из информационных входов мультиплексора (32) (i,j,k)-го процессора (30) соединен с выходом регистра-триггера (33) того процессора (30), чей квадратик 1×1 при повороте квадрата q3×q3 на угол, кратный 90°, вокруг своего центра полностью отображается в квадратик 1×1 (i,j,k)-го процессора (30), другой информационный вход соединен с выходом регистра-триггера (33) того процессора (30), чей кубик 1×1×1 при повороте куба q3×q3 на угол, кратный 90°, вокруг своего центра полностью отображается в кубик 1×1×1 (i,j,k)-го процессора (30), в каждом (i,j,k)-м многовходовом мультиплексоре (32) для каждого аппаратно-реализуемого дискретизирующего отображения, моделирующего преобразование ƒ: R3 → R3 поворота пространства R3 на углы, некратные 90°, вокруг взаимно ортогональных центральных осей куба q2×q2×q2, расположенных параллельно ребрам этого куба, имеется информационный вход, соединенный с выходом первого регистра-триггера (33) того процессора матрицы (20) q2×q2×q2, чей соответствующий кубик 1×1×1 при моделировании указанного преобразования отображается в кубик 1×1×1, соответствующий (i,j,k)-му процессору (30), выходы регистров-триггеров (35) процессоров (30) соединены с входами вычислителя меры одноцветного содержимого АБИ (24), выполненного по схеме q6-входового параллельного двоичного сумматора, и с входами формирователя кода заполнения АБИ (21), входы ПМ соединены с выходами видеодатчиков (10), а ее выходы соединены с входами узлов (1 и 7) управления исполнительными сервоприводами AMP, отличающееся тем, что блок программного управления структурно состоит из главного контроллера (1), подчиняющегося ему контроллера (7) системы компьютерного зрения (СКЗ) и контроллеров (15) навигационных видеоанализаторов (НВА) (8), подчиняющихся общему контроллеру СКЗ (7), причем каждый контроллер НВА (15) и управляемый им блок (16) обработки бинарных 2D и 3D изображений (БОБИ), обрабатывающий 2D-АБИ и 3D-АБИ с предельно высокой степенью параллелизации, образуют вместе один навигационный видеоанализатор (8), при этом устройство содержит несколько таких однотипных НВА (8), в каждый из которых дополнительно введены контроллер (25) управления ПМ, узел (26) оцифровки видеосигналов, узел (27) ввода видеоданных и узел (28) вывода видеоданных из ПМ, при этом контроллер (25) управления ПМ состоит из микропрограммного автомата (МП) ввода видеоданных (44), МП вывода видеоданных на монитор (45) и МП вывода видеоданных в телевизионный передатчик (46), узел (26) оцифровки видеосигналов состоит из коммутатора (49) видеосигналов, генератора (47) тактовых импульсов, аналого-цифрового преобразователя (48) яркости видеосигнала и селектора (50) синхроимпульсов, узел (27) ввода видеоданных включает в себя коммутатор (51) видеоданных и синхросигналов и входной видеобуфер (52), состоящий из (μ+1) двоичных сдвиговых регистров одинаковой разрядности с общим управлением, последовательный информационный вход каждого из этих сдвиговых регистров через собственный коммутатор (51) соединен со своим разрядом выходного (μ+1)-разрядного информационного кода параметра, передаваемого видеодатчиком (10), а каждый из параллельных информационных выходов регистров видеобуфера (52) соединен с информационным входом «Видео» своего процессора (30), дополнительно введенным в состав каждого мультиплексора (32), узел (28) вывода видеоданных из матрицы (20) содержит выходной видеобуфер (53), состоящий из цифроаналогового преобразователя (ЦАП) (54) выводимого видеосигнала и (w+1) двоичных сдвиговых регистров одинаковой разрядности с общим управлением, число которых совпадает с числом двоичных разрядов кода значения выводимого видеосигнала, каждый из параллельных информационных входов этих регистров взаимно однозначно соединен с выходом своего процессора (30), а их последовательные выходы соединены с одноименными входами ЦАП (54), выходы которого соединены с аналоговыми входами монитора (55) или телевизионного передатчика (56).
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| СПОСОБ ПОЛУЧЕНИЯ МОНОАРЙЛМОЧЕВЙНiiw | 0 |
|
SU173747A1 |

