Изобретение относится к измерительной технике и может быть использовано для диагностики состояния внутренней поверхности труб.
Известен дефектоскоп для контроля внутренней поверхности труб (варианты) (патент RU № 2352921, опубл. 20.04.2009 г.), состоящий из корпуса, в котором установлены телевизионная камера и кольцевая система направленного излучения света, состоящая из светодиодов, а также привода продольного перемещения корпуса внутри обследуемой трубы, выполненного в виде полой штанги и механически связанной с электродвигателем. К корпусу прикреплен на кронштейнах отражатель света с зеркальной поверхностью, которая имеет вогнутую внутрь конусовидную форму. Лучи света, поступающие от светодиодов, отражаются от зеркальной поверхности и концентрируются на внутренней поверхности трубы в виде узкого кольцевого пояса s. Сигналы, поступающие в компьютер, позволяют определить продольные размеры дефектов и координаты положения дефектов по длине трубы.
Недостатком устройства является использование полой штанги в приводе, поскольку это серьезно ограничивает длину обследуемых труб.
Известно устройство для диагностики состояния внутренней поверхности труб (патент RU № 2528033, опубл. 10.09.2014 г.), состоящее из измерительного блока, который содержит источники освещения контролируемой внутренней поверхности, в качестве которых выступают четыре полупроводниковых лазера, корпус измерительного блока, который подключен к блоку регистрации и обработки информации через кабель, измерительный блок имеет возможность перемещения внутри трубы. При этом четыре полупроводниковых лазера выполнены с возможностью регистрации электрического сигнала на p-n-переходе при попадании в резонатор лазера излучения, отраженного от внутренней поверхности трубопровода.
Недостатком устройства является использование кабеля для связи с блоком регистрации обработки информации, поскольку длина исследуемой трубы ограничивается длиной кабеля.
Известно устройство для автоматического мониторинга состояния асбестоцементных сбросных трубопроводов закрытой оросительной системы (патент RU № 2762362, опубл. 20.12.2021 г.), содержащее перемещаемое относительно обследуемого трубопровода с помощью приводных колес устройство со средствами сканирования, получения изображений поверхности трубопровода, регистратор и передачи данных на компьютер для формирования трехмерной модели трубопровода с помощью блока программного обеспечения, причем для получения изображений внутренней поверхности трубопровода и регистрации использованы соответственно: сканер в виде георадарной антенны на телескопической штанге, цифровой фотоаппарат или видеокамера с подсветкой и регистратор в виде маркера, сообщенного через магистраль с емкостью для красящего вещества, при этом для обеспечения возможности их циклического вращения по внутренней поверхности трубопровода и перемещения вдоль него использован шаговый электродвигатель с полым вращающимся валом и блоком управления.
Недостатком устройства является установка сканера в виде георадарной антенны, что приводит к низкой помехоустойчивости, точности измерения.
Известно видеоустройство для контроля неровностей внутренней вертикальной цилиндрической поверхности (патент RU № 2425327, опубл. 27.07.2011 г.), состоящее из цилиндрического корпуса с верхним и нижним кольцевыми окнами. За верхним кольцевым окном установлена телекамера с ПЗС-матрицей, которая имеет возможность для перемещения вдоль продольной оси корпуса и фиксации в зависимости от диаметра контролируемой поверхности. За нижним кольцевым окном установлен кольцевой источник света. Корпус снабжен устройством в виде троса для перемещения внутри контролируемой поверхности. В верхней части корпуса закреплены визирные марки, которые находятся в поле зрения второй телекамеры с ПЗС-матрицей, закрепляемой на контролируемой поверхности 5. В нижней части корпуса установлен балансир с возможностью перемещения перпендикулярно продольной оси корпуса и фиксации для приведения оптической оси телекамеры в вертикальное положение.
Недостатком устройства является использование троса для перемещения внутри контролируемой поверхности, что делает устройство пригодным для использования только в вертикальных цилиндрических поверхностях
Известен оптический дефектоскоп для контроля внутренней поверхности жидкостных трубопроводов (патент RU № 2150690, опубл. 10.06.2000 г.), принятый за прототип, состоящий из оптического дефектоскопа для контроля внутренней поверхности жидкостных трубопроводов, содержащий лазерный излучатель и фотоприемник, расположенный в ходе лучей зеркально отраженного светового потока, которые помещены в корпус, состоящий из двух частей, соединенных герметично одетой цилиндрической обечайкой, имеющей четное количество оптически прозрачных окон с перемычками меньшей величины и имеющей возможность поворота на угол ϕ = π/2n, где n -количество прозрачных окон, а между излучателем и фотоприемником установлен уголковый отражатель с возможностью вращения.
Недостатком устройства является использование лазерного излучателя, поскольку отражением лазерных лучей от поверхности трубопровода можно определить только поверхностные трещины, что приводит к невозможности определения развития внутренних трещин, а также то, что корпус соединен герметично одетой цилиндрической обечайкой, что позволяет исследовать трубопроводы фиксированного диаметра.
Техническим результатом является повышение точности диагностики технического состояния внутренней поверхности трубопроводов различного диаметра.
Технический результат достигается тем, что измерительный блок, закрепленный в передней части устройства, включает излучатель и приемник ультразвуковых волн, в задней части устройства закреплен блок хранения результатов сканирования, вход которого соединен через электрический кабель с выходом измерительного блока, а также в задней части устройства закреплен аккумулятор, выходы которого соединены через электрический кабель с входами измерительного блока, блока хранения результатов сканирования и микропроцессора, закрепленного между аккумулятором и блоком хранения результатов сканирования в задней части устройства, причем выход микропроцессора соединен через электрический кабель с входом измерительного блока, кроме того, на корпусе устройства под углом 1200 друг к другу закреплены три телескопические опоры, на концах которых закреплены электромоторы, которые соединены с колесами при помощи валов вращения, и питаемые аккумулятором.
Устройство поясняется следующими фигурами:
фиг. 1 - общий вид устройства;
фиг. 2 - вид устройства спереди;
фиг. 3 - вид устройства сверху;
1 - корпус;
2 - телескопические опоры;
3 - электромоторы;
4 - колеса;
5 - валы вращения;
6 - электромотор;
7 - вал вращения;
8 - измерительный блок;
9 - излучатель;
10 - приемник;
11 - аккумулятор;
12 - блок хранения результатов сканирования;
13 - микропроцессор;
14 - трубопровод.
Устройство, состоит из корпус 1 (фиг. 1-3), выполненного в форме цилиндра, на котором закреплены телескопические опоры 2, расположенные под углом 120° друг к другу для того, чтобы все опоры находились на равном расстоянии друг от друга, а корпус находился в центре, исследуемого трубопровода. На концах телескопических опор 2 закреплены электромоторы 3, которые соединены с колесами 4 при помощи валов вращения 5. В передней части корпуса 1 закреплен электромотор 6, соединенный валом вращения 7 с измерительным блоком 8, в котором в котором последовательно установлены излучатель 9 и приемник 10 ультразвукового сигнала. В задней части корпуса 1 закреплен аккумулятор 11, выход которого соединен через электрический кабель с входом измерительного блока 8, а также закреплен с возможностью съема блок хранения результатов сканирования 12, вход которого соединен через электрический кабель с выходом измерительного блока 8. Вход блока хранения результатов сканирования 12 соединен через электрический кабель с выходом аккумулятора 11. Между аккумулятором 11 и блоком хранения результатов сканирования 12 закреплен микропроцессор 13, вход которого соединен через электрический кабель с выходом аккумулятора 11. Выход микропроцессора 13 соединен через электрический кабель с входом измерительного блока 8.
Устройство работает следующим образом. Устройство устанавливается в начало исследуемого трубопровода 14 в зависимости от его диаметра, раздвигая три телескопические опоры 2 под необходимый диаметр трубопровода. Устройство перемещается к первоначальному участку сканирования при помощи колес 4, соединенных с электромоторами 3 через валы вращения 5. Измерительный блок 8, вращаясь вокруг своей оси при помощи электромотора 6, соединенного с измерительным блоком 8 через вал вращения 7, проводит сканирование первоначального участка, излучая ультразвуковые волны излучателем 9, которые, отражаясь от стенок трубопровода, попадают на приемник 10. После окончания процесса сканирования устройство, не изменяя своей угловой ориентации, перемещается к следующему участку сканирования при помощи электромоторов 3, соединенных с колесами 4 через валы вращения 5, после чего процесс сканирование повторяется. Необработанные данные, получаемые приемником 10, поступают в блок хранения результатов сканирования 12. По окончании сканирования блок хранения результатов сканирования 12 снимается с устройства для дальнейшей обработки данных, полученных во время сканирования.
Устройство для автоматизированной диагностики технического состояния трубопроводов позволяет проводить диагностику состояния трубопроводов без присутствия человека за счет использования трех телескопических опор, на которых закреплены колеса, вращаемые электромоторами, питаемыми аккумулятором, закрепленном на устройстве, что позволяет устройству перемещаться в исследуемом трубопроводе в автоматизированном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ПОВЕРХНОСТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2022 |
|
RU2786912C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛОКОНСТРУКЦИЙ И ТРУБОПРОВОДОВ | 2022 |
|
RU2778619C1 |
| Мобильное устройство для определения параметров векторных приемников | 2020 |
|
RU2742870C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2778403C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ТРУБОПРОВОДОВ | 2024 |
|
RU2822296C1 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| ВНУТРИТРУБНЫЙ БУКСИРОВЩИК ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2010 |
|
RU2434179C1 |
| Устройство для диагностики внутренней поверхности вращающихся трубопроводов | 2024 |
|
RU2831869C1 |
| ВАКУУМНЫЙ ПЫЛЕСОС | 2017 |
|
RU2694917C1 |


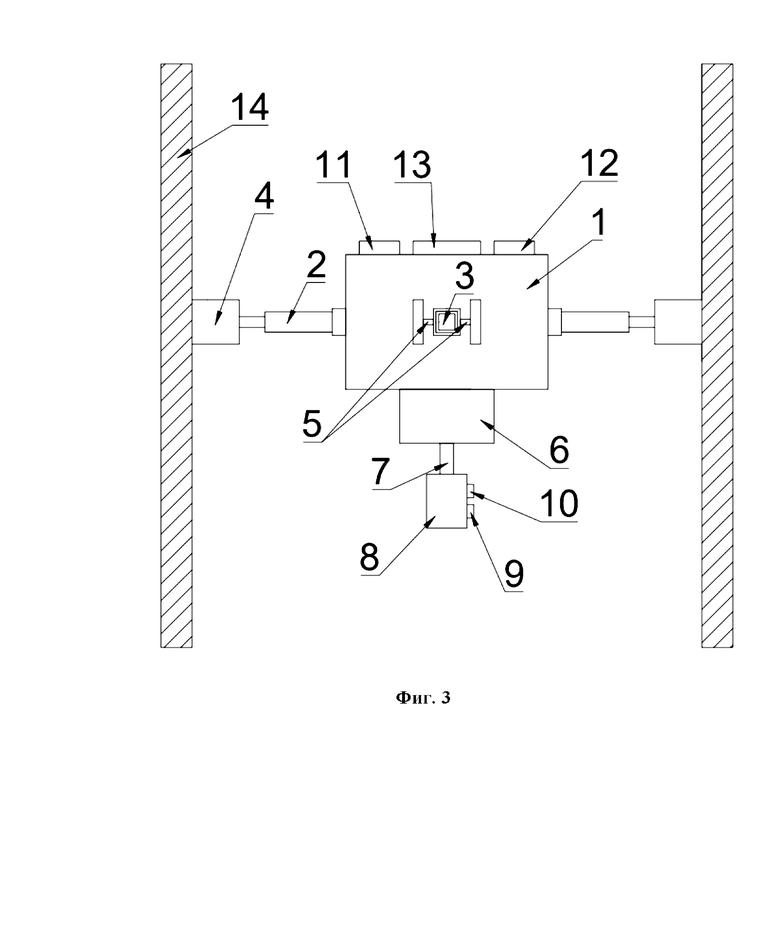
Изобретение относится к устройствам для ультразвуковой диагностики состояния внутренней поверхности труб. Устройство для автоматизированной диагностики технического состояния трубопроводов (14) содержит измерительный блок (8) с возможностью вращения вокруг своей оси при помощи электромотора (6) с валом вращения. Измерительный блок (8) закреплен в передней части устройства и включает излучатель (9) и приемник (10) ультразвуковых волн. В задней части устройства закреплен блок хранения результатов сканирования, вход которого соединен через электрический кабель с выходом измерительного блока (8). В задней части устройства закреплен аккумулятор, выходы которого соединены через электрический кабель с входами измерительного блока (8), блока хранения результатов сканирования и микропроцессора, закрепленного между аккумулятором и блоком хранения результатов сканирования в задней части устройства. Выход микропроцессора соединен через электрический кабель с входом измерительного блока (8). На корпусе устройства под углом 120° друг к другу закреплены три телескопические опоры (2), на концах которых закреплены электромоторы (3), которые соединены с колесами (4) при помощи валов вращения, и питаемые аккумулятором. Технический результат заключается в повышении точности диагностики технического состояния внутренней поверхности трубопроводов различного диаметра. 3 ил.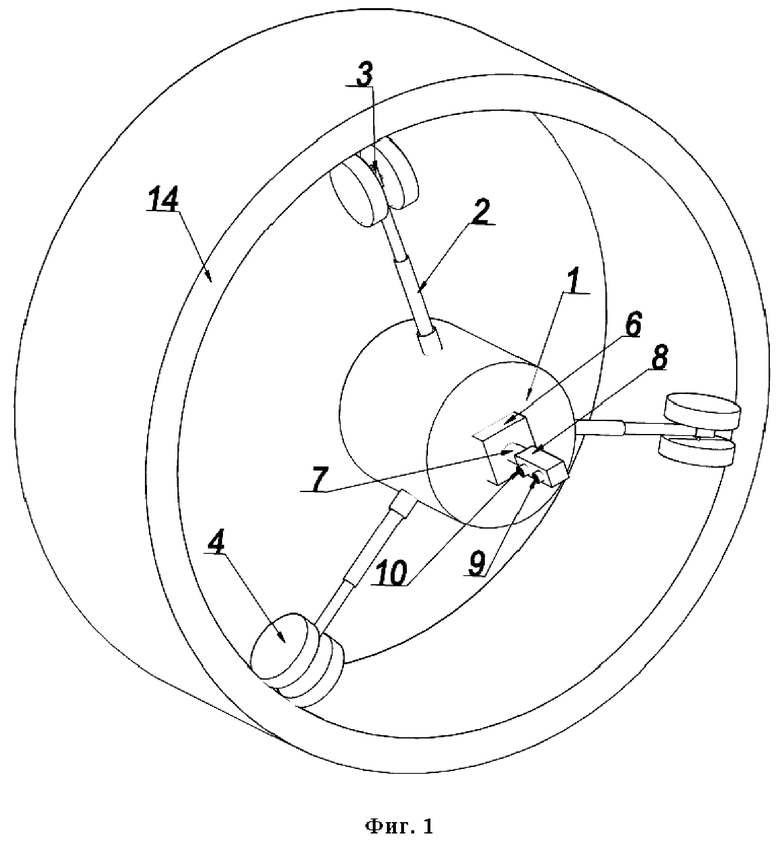
Устройство для автоматизированной диагностики технического состояния трубопроводов, содержащее измерительный блок с возможностью вращения вокруг своей оси при помощи электромотора с валом вращения, отличающееся тем, что измерительный блок, закрепленный в передней части устройства, включает излучатель и приемник ультразвуковых волн, в задней части устройства закреплен блок хранения результатов сканирования, вход которого соединен через электрический кабель с выходом измерительного блока, а также в задней части устройства закреплен аккумулятор, выходы которого соединены через электрический кабель с входами измерительного блока, блока хранения результатов сканирования и микропроцессора, закрепленного между аккумулятором и блоком хранения результатов сканирования в задней части устройства, причем выход микропроцессора соединен через электрический кабель с входом измерительного блока, кроме того, на корпусе устройства под углом 120° друг к другу закреплены три телескопические опоры, на концах которых закреплены электромоторы, которые соединены с колесами при помощи валов вращения, и питаемые аккумулятором.
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СТЕНКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ МУАРОВЫМ МЕТОДОМ | 2012 |
|
RU2497074C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ ТРУБ И ТРУБОПРОВОДОВ | 1999 |
|
RU2149394C1 |
| CN 204630951 U, 09.09.2015 | |||
| JPH 09281087 A, 31.10.1997. | |||

