Изобретение относится к испытательной технике и может быть использовано для определения массы, координат центра масс и момента инерции комбинированных многозвенных машинно-тракторных агрегатов и других тягово-транспортных средств, имеющих сложную пространственную конструкцию.
Известен метод определения момента инерции машины и координат центра масс машины через координаты центров масс отдельных элементов, входящих в состав машины [1].
Недостатком такого метода является большой объем расчетов и необходимость полного пересчета координат центра масс и момента инерции машины даже при незначительном изменении конструкции машины.
Наиболее близким к данному изобретению является метод и конструкция стенда для определения центра масс и момента инерции звеньев машин [2], содержащего платформу, устанавливаемую на две опоры - шарнирно-неподвижную и «подпятник», механизм уравновешивания, упругие элементы и «аппарели».
Недостатком такого стенда является необходимость предварительного взвешивания машины и замера расстояний от оси вращения «подпятника» до центра масс машины рулеткой, что приводит к появлению погрешности.
Технический результат данной работы - повышение точности определения момента инерции комбинированного машинно-тракторного агрегата.
Для достижения указанного технического результата предлагаемое устройство в отличие от прототипа содержит механизм для подъема-опускания и продольно-поперечного перемещения платформы с установленным на ней машинно-тракторным агрегатом.
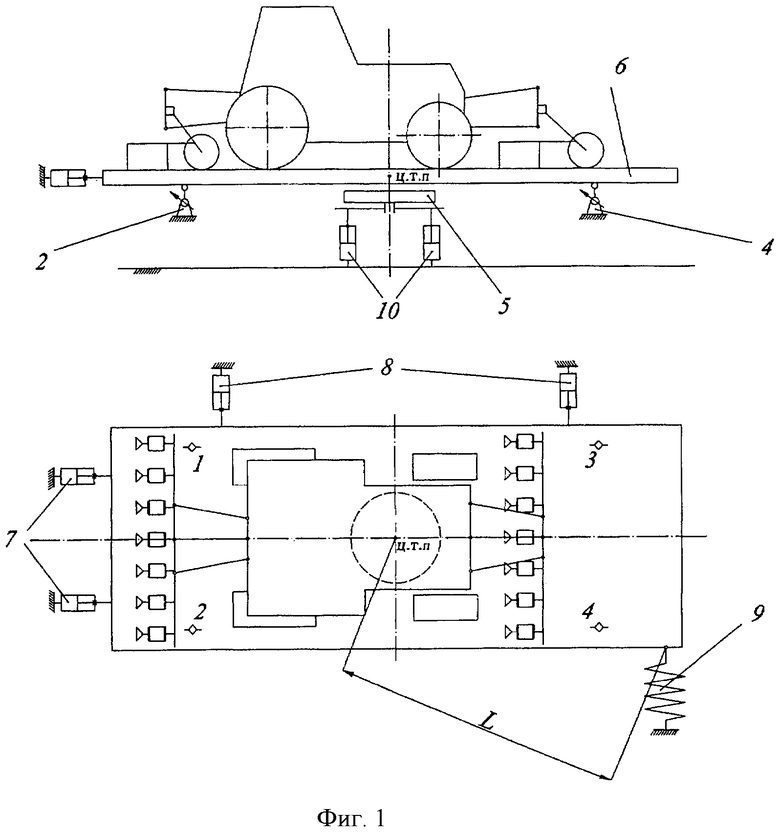
На фиг.1 изображено предлагаемое устройство.
Устройство для определения массово-геометрических характеристик тягово-транспортных средств состоит из четырех опор 1, 2, 3 и 4 с тензодатчиками, опоры типа «подпятник» 5, платформы с установленным на ней машинно-тракторным агрегатом 6, гидроцилиндров для перемещения платформы 7 и 8, упругого элемента 9.
Опоры 1, 2, 3 и 4 с тензодатчиками жестко закреплены на неподвижном опорном основании. Информация с датчиков поступает на ЭВМ и обрабатывается. Опоры 1, 2, 3 и 4 выполнены таким образом, чтобы платформа 6 свободно перемещалась по ним в горизонтальной плоскости. Опоры 1, 2, 3 и 4 расположены на равных расстояниях от оси вращения «подпятника».
Гидроцилиндры 7 и 8 своими корпусами жестко закреплены на неподвижном опорном основании, а их штоки шарнирно соединены с платформой 6. Гидроцилиндры 7 и 8 связаны с гидросистемой, которая управляется ЭВМ.
«Подпятник» 5 жестко закреплен на штоках гидроцилиндров 10, а его верхняя часть способна вращаться вокруг своей вертикальной оси.
Упругий элемент 9 одним концом жестко закреплен к неподвижному опорному основанию, а другим - шарнирно к платформе 6.
Устройство для определения массово-геометрических характеристик тягово-транспортных средств работает следующим образом.
Платформа 6 устанавливается на опоры 1, 2, 3 и 4 так, чтобы ее центр масс располагался над осью вращения «подпятника». ЭВМ определяет массу платформы 6, суммируя реакции в опорах 1, 2, 3 и 4. Машинно-тракторный агрегат заезжает на платформу 6 по аппарелям таким образом, чтобы центр масс системы «платформа - машинно-тракторный агрегат» располагался как можно ближе к оси вращения «подпятника» 5, что определяется при помощи ЭВМ по показаниям датчиков в опорах 1, 2, 3 и 4. После этого ЭВМ определяет массу системы «платформа - машинно-тракторный агрегат», суммируя реакции в опорах 1, 2, 3 и 4, отнимает из полученного значения массу платформы 6 (определенную экспериментально ранее) - получается масса машинно-тракторного агрегата. Затем ЭВМ суммирует значения реакций в опорах 1 и 2 и опорах 3 и 4, включает гидросистему и при помощи гидроцилиндров 7 производится перемещение платформы 6 вдоль продольной оси машинно-тракторного агрегата в сторону опор, у которых сумма реакций меньше, то тех пор пока уравняются сумма реакций в опорах 1 и 2 и сумма реакций в опорах 3 и 4, в результате чего центр масс системы «платформа - машинно-тракторный агрегат» в продольной оси расположится над осью вращения «подпятника» 5 (определяется координата xП - расстояние от центра масс платформы до центра масс системы «платформа - машинно-тракторный агрегат» по оси х (фиг.2)). Далее ЭВМ суммирует значения реакций в опорах 1 и 3 и опорах 2 и 4, включает гидросистему и при помощи гидроцилиндров 8 производится перемещение платформы 6 вдоль поперечной оси машинно-тракторного агрегата в сторону опор, у которых сумма реакций меньше, то тех пор пока уравняются сумма реакций в опорах 1 и 3 и сумма реакций в опорах 2 и 4, в результате чего центр масс системы «платформа - машинно-тракторный агрегат» расположится точно над осью вращения «подпятника» 5 (определяется координата yп - расстояние от центра масс платформы до центра масс системы «платформа - машинно-тракторный агрегат» по оси у (фиг.2)).
После этого производится отсоединение гидроцилиндров 7 и 8 от платформы 6, установка платформы 6 на «подпятник» 5 при помощи гидроцилиндров 10, присоединение свободного конца упругого элемента 9 к платформе 6. Далее система «платформа - машинно-тракторный агрегат» выводится из положения равновесия и фиксируется процесс свободных затухающих колебаний платформы.
Момент инерции системы «платформа - машинно-тракторный агрегат» относительно оси качания, проходящей через центр масс системы «платформа - машинно-тракторный агрегат» (точка О), вычисляется по формуле [3]:

где Т - период затухающих колебаний,
С - жесткость упругого элемента,
L - расстояние от оси вращения «подпятника» до точки крепления упругого элемента к платформе.
Затем, не меняя положения платформы 6, машинно-тракторный агрегат съезжает с платформы и измеряется момент инерции платформы  относительно оси качания, проходящей через центр масс системы «платформа - машинно-тракторный агрегат» (точка О).
относительно оси качания, проходящей через центр масс системы «платформа - машинно-тракторный агрегат» (точка О).
Момент инерции машинно-тракторного агрегата относительно оси качания, проходящей через центр масс системы «платформа - машинно-тракторный агрегат» (точка О), JМТАо, определяется по формуле [1]:

Также момент инерции машинно-тракторного агрегата относительно оси качания, проходящей через центр масс системы «платформа - машинно-тракторный агрегат» (точка О) JМТАо, можно описать уравнением  откуда:
откуда:

где  - момент инерции машинно-тракторного агрегата относительно оси, проходящей через центр масс машинно-тракторного агрегата (точка А);
- момент инерции машинно-тракторного агрегата относительно оси, проходящей через центр масс машинно-тракторного агрегата (точка А);
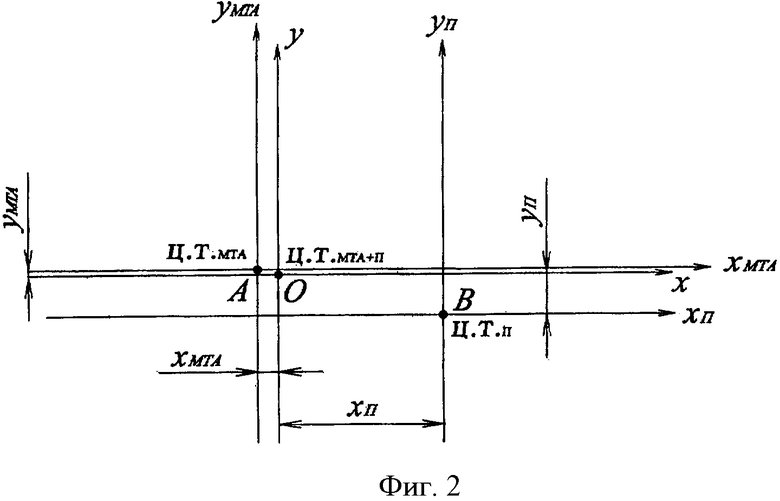
х, у - расстояния от центра масс машинно-тракторного агрегата до центра масс платформы (фиг.2);
mМТА - масса машинно-тракторного агрегата.
Расстояния от центра масс машинно-тракторного агрегата до центра масс системы «платформа - машинно-тракторный агрегат» х и у определяются по формулам [1]:
где x1, y1 - расстояния от центра масс платформы до центра масс системы «платформа - машинно-тракторный агрегат» (определяются при перемещении платформы (фиг.2));
GМТА, GП - соответственно вес машинно-тракторного агрегата и вес платформы.
Подставив уравнения (2) и (4) в уравнение (3) получится формула для определения момента инерции машинно-тракторного агрегата относительно оси, проходящей через центр масс машинно-тракторного агрегата (точка А):

где g - ускорение свободного падения, g=9,81 м/с2.
Таким образом предлагаемое устройство позволяет одновременно определить массу, координаты центра масс и повысить точность определения момента инерции комбинированного машинно-тракторного агрегата, а также других многозвенных тягово-транспортных средств, имеющих сложную пространственную конструкцию.
Источники информации
1. Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов. - 10-е изд., перераб. и доп.- М.: Высш. шк., 1986. - 416 с.
2. Валекжанин А.И. Экспериментальное определение массово-геометрических характеристик звеньев автопоезда / А.И.Валекжанин, А.С.Павлюк: М-во автомобильной промышленности СССР. - М., 1986. - 33 с. - Деп. в НИИНавтопром, 28.02.86, №1320-ап.
3. Основы теории транспортных гусеничных машин. Забавников Н.А. - М.: Машиностроение, 1968. - 396 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения моментов инерции и координат центра масс изделий | 1983 |
|
SU1097899A1 |
| Установка для пространственного динамометрирования навесных сельскохозяйственных машин и орудий | 2018 |
|
RU2682085C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| Стенд для определения моментов инерции транспортных объектов | 1980 |
|
SU868424A1 |
| РЫХЛИТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 2021 |
|
RU2764005C1 |
| Транспортное средство | 1991 |
|
SU1789408A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Стенд для испытания транспортных средств | 1987 |
|
SU1427201A2 |
| Устройство для разгрузки транспортных средств ИЛМА | 1980 |
|
SU1079549A1 |
Изобретение относится к области транспортного машиностроения. Устройство для определения массово-геометрических характеристик тягово-транспортных средств содержит платформу, четыре опоры с тензодатчиками, опору типа «подпятник», упругий элемент. Платформа с установленным на ней тягово-транспортным средством соединена с гидроцилиндрами, управляемыми ЭВМ. Опора типа «подпятник» установлена на штоках гидроцилиндров. Достигается повышение точности определения момента инерции тягово-транспортного средства. 2 ил.
Устройство для определения массово-геометрических характеристик тягово-транспортных средств, содержащее платформу, четыре опоры с тензодатчиками, опору типа «подпятник», упругий элемент, отличающееся тем, что платформа, с установленным на ней тягово-транспортным средством соединена с гидроцилиндрами, управляемыми ЭВМ, а опора типа «подпятник» установлена на штоках гидроцилиндров.
| US 5199686 А, 06.04.1993 | |||
| Домкрат | 1987 |
|
SU1421682A1 |
| ЭНЕРГОПОГЛОЩАЮЩАЯ ЧАСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2208535C2 |
| KR 20030097108 А, 31.12.2003. | |||

