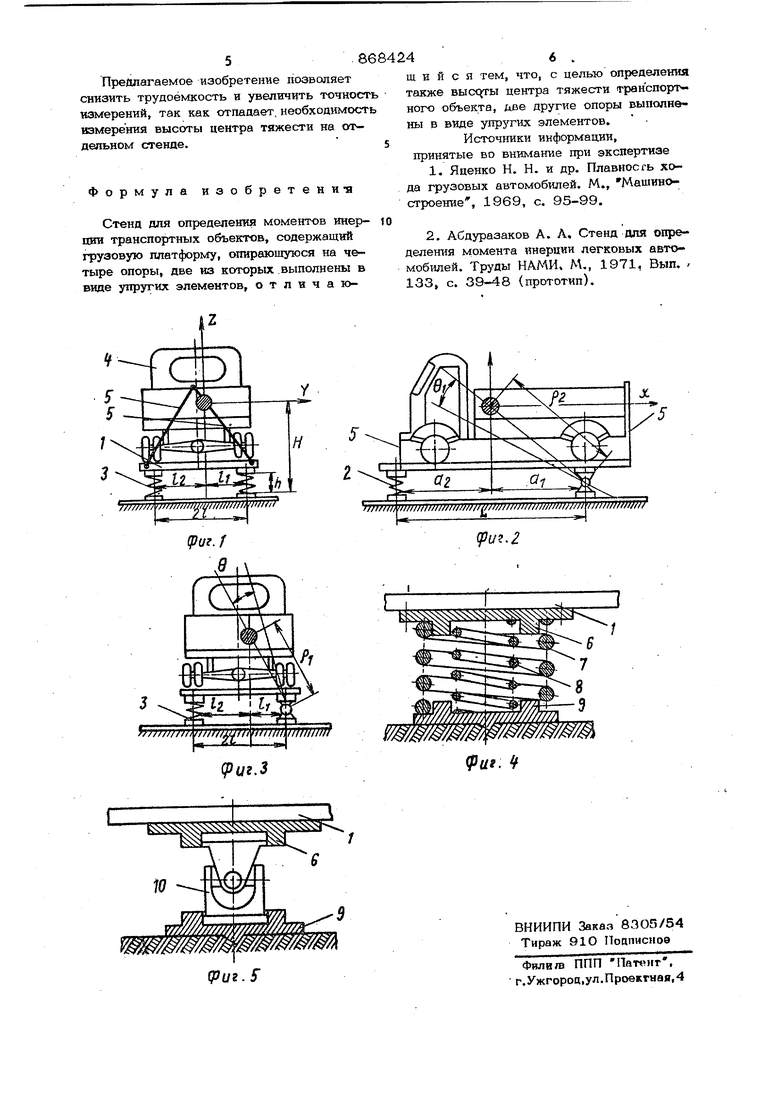
(54) СТЕЦЦ. ДЛЯ ОПРЕДЕЛЕНИЯ МОМЕНТОВ ИНЕРПИИ ТРАНСПОРТНЫХ ОБЪЕКТОВ Изобретение относится к экспериментальному О1феделению координат центра тяжести и моментов инерции транспортных объектов, например, автомобилей различых марок. Известен стенд для определения высоты центра тяжести и моментов инерции автомобилей, использующий две вертикаль ные фермы, связанные по основанию прямоугольной рамой и соединенные в верхней части поперечной балкой. При этом высота центра тяжести автомобиля определяется путем приложения дополнительно го груза к автомобилю, подвешенному к поперечной балке с помощью грузовых тяг с подшипниковыми узлами качания, и замера при этом угла отклонения автомобиля от первоначального положения. Моменты инерции автомобиля измеряются по периоду собственных колебаний относитвш: но оси подвесов с амплитудой 5-7 Ы . Недостатком этого устройства являет ся сложность конструкции и трудоемкость измерений. Наиболее близким по технической сущности к предлагаемому является стенд для определения моментов инерции транспортных объектов, содержащий грузовую платформу, опирающуюся на четыре опоры, две из которых выполнены в виде упругих элементов 23. Недостатком является то, что он не дает возможности определить центра тяжести, так как другие его опоры выполнены жесткими. Цель изобретения - определение также высоты центра тяжести трансцортного объекта. Указанная цель достигается тем, что две другие опоры выполнены в виде упругих элементов. На фиг. 1 изображен стенд с упругими опорами, вид сзади; на фиг. 2 - то же с двумя шарнирными опорами, размещенными с одной поперечной стороны, вид сбоку; на фиг. 3 го же, с двумя шарнир- ныкш опорами, размещенными с одной пропродопыюй стороны, вид сзади; на фиг. 4 конструктивная схема упругой опоры; на фиг. 5 - конструктивная схема шарнирКоЯ опоры, Стенд додержит грузовую платформу 11 О1Пфа19Щуюся на четыре опоры, две из которых, например передние, выполнены В виде упругих элементов 2, одна из них устаногшена с возможностью оперативной замены, а две другие также вьшопнены в виде ЭШругих элементов 3 и обе установлены С возможностью оперативной замены. Автомобиль 4 на грузовой платформе 1 закреплен спереди и сзади растяжками 5 (фиг. 2). Каждая опора, выполненная в виде упругого элемента, закрепленного на нижне стороне грузовой платформы 1 с помощью опорного диска 6 (фиг, 4 и 5), состоит из наружной 7 и внутренней 8 цилиндрическвдс пружин и основания 9, Работа стенда осуществляется следующим образом. После установки автомобиля 4 на гру зовую платформу 1 и закрепления его с помощью растяжек 5 под грузовую платформу , с четырех сторон устанавливаютс опоры, выполненные в виде упругих элементов 2 и 3. Опоры , сообщив платформе 1 с автомобилем 4 колебаний в басовом направлении, определяют частоту п. собственшэ1х колебаний системы вокруг продольной оси. Затем, заменив; в однбй из пр эдаг1ьных сторон опоры, выполненные в виде упругих элементов 2 и 3 на шарнирные узльт 10 (фиг. 5), выполненные в . ных подвесов, определяют частоту ип собственных колебаний вокруг оси качания. Высоту центра тяжести системы находят по следующей формуле ( VI:: п; Hh где OQ, Сд - лсесткость одного упругогн элемента; С - жесткость наружной пружины;CQ жесткрсть внутренней пру жины;, ti - высота упругого элемента в статическом состоянии; М - масса системы (платформы транспортного объекта |Рп 1ЖССТОЯНИЯ между проекци ей центра тяжести и прот воположными опорами в в плоскости; У (фиг. 2) определяются взвешиванием. 2 и - расстояние между упругими элементами и осью шарнира. Повторив измерения отдельно для ненагунсенной платформы, определяют высоту ее ентра тяжести. Затем путем вьгаислений пределяют высоту центра тяжести трансортного объекта, автомобиля 4, относитеьно опорной поверхности полей. Момент инерции транспортного объекта Лх относительно продольной оси, прохоящей через его центр тяжести (фиг. 1 и ) определяется из выражения . . где М - масса автомобиля; 5 - радиус инерции массы автомобиля относительно оси качания (фиг. 3); (х)п момент инерции платформы, который определяют, рассматривая собственные колебания не- груженной платформы; где п (д - частота собственных колебаний по схеме (фиг, З), Подставив упругие элементы под передгаою сторону грузовой платформы 1, а шарнтфные узлы под заднюю (фиг. 4) или наоборот, определяют собственную частоту колебаний По вокруг поперечной оси качания. Момент инерции автомобиля У относительно поперечной оси, проходящей через центр тяжести (фиг. 4). определяется из выражения БГ - - где Pf - радиус инерции транспортного объекта относительно оси; ()rt - момент инерции платформы, определяемый аналогично (Э у )п/у. Для обеспечения высокой точности измерений с транспортными объектами различных типов жесткости С и CQ регулируют в широких пределах, а опоры устаиавливают на расстоянии йв- О-ЗГ-/ -с расчетом, чтобы собственные частоты i были ниже 1 Гц, где 3 - приближенное значение момента инерции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения моментов инерции и координат центра масс изделий | 1983 |
|
SU1097899A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ, В ЧАСТНОСТИ МОМЕНТА ИНЕРЦИИ И ЖЕСТКОСТИ ПОДВЕСКИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОГО АГРЕГАТА | 1998 |
|
RU2141633C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССОВО-ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ТЯГОВО-ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2426088C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 1999 |
|
RU2158906C1 |
| Стенд для определения моментов инерции транспортного средства | 1986 |
|
SU1332168A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2005 |
|
RU2278053C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ КОЛЕСНЫХ ТРАНСПОРТНЫХСРЕДСТВ | 1970 |
|
SU276469A1 |
| ДЫШЛО АВТОПРИЦЕПА | 2008 |
|
RU2420420C2 |
