ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в целом, к хирургии и более конкретно к устройству для выполнения хирургической операции на органах пищеварительной системы.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Процент мирового населения, страдающего патологическим ожирением, неуклонно возрастает. Люди, страдающие сильным ожирением, могут быть подвержены повышенному риску заболеваний сердца, острого нарушения мозгового кровообращения, диабета, заболеваний легких и травм. В связи с влиянием патологического ожирения на жизнь пациента, способы лечения патологического ожирения являются предметом интенсивного исследования.
Один из известных способов лечения патологического ожирения включает в себя применение анастомозных колец. Устройства для наложения анастомозных колец известны в данной области техники. Устройства этого назначения обычно выполнены с возможностью размещения сжатого анастомозного кольца в анастомозном отверстии, сформированном между расположенными вблизи друг от друга тканями стенок желудочно-кишечного тракта. Эти устройства-аппликаторы могут использовать механизм раскрытия анастомозного кольца, содержащий раскрывающийся элемент, который приводится в действие с того момента, когда сжатое кольцо оказывается помещенным в анастомозное отверстие, заставляя анастомозное кольцо расширяться из его сжатого положения в форме цилиндра до приведенного в действие положения в форме полой заклепки.
Однако устройства, известные в данной области техники, обычно содержат негнущийся ствол, прикрепленный к рукоятке. Хотя эти устройства могут быть хорошо приспособленными к раскрытию кольца, может оказаться трудным осуществление правильного раскрытия кольца, когда канал троакара был неправильным образом установлен, поскольку это может не позволить хирургу найти пригодный для работы угол доступа. Это может потребовать удаления и повторной установки троакара хирургом, таким образом увеличивая продолжительность операции. Альтернативно, хирург может попытаться поместить и развернуть кольцо, несмотря на неудобный угол доступа. Это может вызывать неправильное развертывание кольца, приводя к осложнениям или несостоятельности анастомоза.
Следовательно, может быть желательным наличие аппликатора, который позволит хирургу изменять угол доступа на участке анастомоза, таком как анастомоз желудка и тощей кишки, когда каналы троакара были неправильным образом установлены.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Варианты исполнения изобретения представляют устройство-аппликатор анастомозного кольца, которое способно сгибаться, таким образом позволяя хирургу улучшать угол доступа аппликатора после введения через канал троакара. Варианты исполнения могут также обеспечивать лучшее рассмотрение анастомоза при помощи лапароскопа посредством обеспечения сгибания устройства-аппликатора.
В одном из вариантов исполнения имеется хирургический инструмент для установки анастомозного кольца, содержащий рукоятку, соединенную с механизмом раскрытия анастомозного кольца посредством удлиненного ствола. Ствол приспособлен к тому, чтобы сообщать приводящее в действие усилие механизму раскрытия анастомозного кольца. Ствол также содержит, по меньшей мере, одно гибкое сочленение, которое приспособлено, к тому, чтобы обеспечить возможность сгибания удлиненного ствола. Таким образом, хирург может сгибать ствол для изменения угла доступа механизма раскрытия анастомозного кольца и/или обеспечить лучшее рассмотрение анастомоза через лапароскоп.
В еще одном варианте исполнения инструмент содержит рукоятку, соединенную с механизмом раскрытия анастомозного кольца посредством удлиненного ствола. Ствол содержит, по меньшей мере, одно гибкое сочленение, которое приспособлено к тому, чтобы сгибаться посредством тянуще/толкающей тяги. Этот вариант исполнения также позволяет хирургу изменять угол доступа механизма раскрытия анастомозного кольца и/или рассмотреть анастомоз через лапароскоп.
В еще одном варианте исполнения инструмент содержит рукоятку, связанную с элементом приведения в действие для раскрытия анастомозного кольца из цилиндрического, не приведенного в действие положения до приведенного в действие, образующего форму полой заклепки, в ответ на сжимающее усилие приведения в действие. Рукоятка включает в себя механизм произведения сжимающего усилия приведения в действие. Инструмент дополнительно содержит удлиненный ствол для соединения рукоятки с элементом приведения в действие. Ствол приспособлен к тому, чтобы передать сжимающее усилие приведения в действие. Ствол дополнительно содержит, по меньшей мере, одно гибкое сочленение, приспособленное к тому, чтобы позволить стволу сгибаться. В этом варианте исполнения хирург может сгибать ствол для более точной установки элемента приведения в действие для приложения сжимающего усилия приведения в действие для того, чтобы развернуть анастомозное кольцо в приведенное в действие положение, образующее полую заклепку, и/или может также получить улучшенное изображение анастомоза при помощи лапароскопа посредством сгибания удлиненного ствола.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Сопровождающие чертежи, которые включены в настоящее описание и составляют его часть, показывают варианты изобретения и вместе с общим описанием изобретения, представленным выше, и подробным описанием вариантов, предоставленных ниже, служат для объяснения принципов настоящего изобретение.
ФИГУРА 1 - вид в перспективе устройства-аппликатора анастомозного кольца.
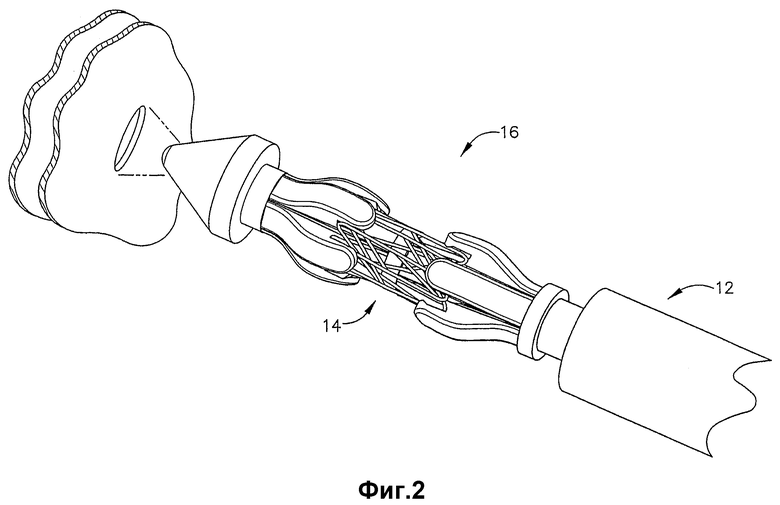
ФИГУРА 2 - частичный вид в перспективе дистальной части устройства-аппликатора анастомозного кольца, удерживающего анастомозное кольцо в не приведенном в действие положении.
ФИГУРА 3 - частичный вид в перспективе дистальной части устройства ФИГУРЫ 2, удерживающего анастомозное кольцо в приведенном в действие положении.
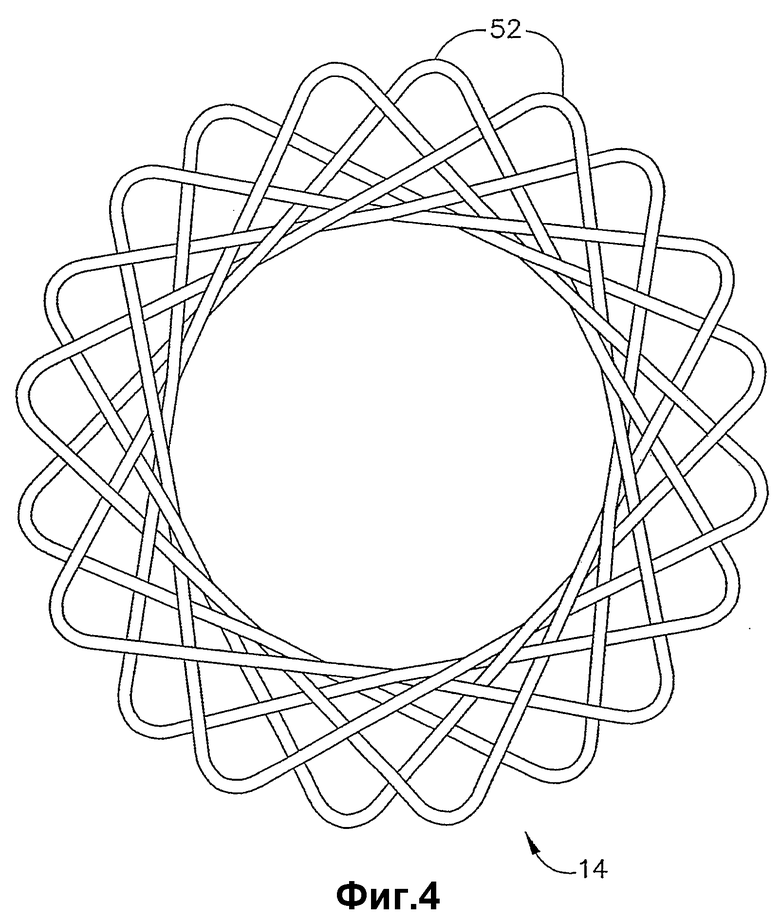
ФИГУРА 4 - фронтальный вид приведенного в действие анастомозного кольца.
ФИГУРА 5 - вид в перспективе устройства ФИГУРЫ 1, показанного с согнутым вверх гибким сочленением и приведенными в действие дистальными пальцевыми захватами.
ФИГУРА 6 - вид в перспективе устройства ФИГУРЫ 1, показанного с согнутым вверх гибким сочленением и приведенными в действие проксимальными пальцевыми захватами.
ФИГУРА 7 - вид в перспективе в разобранном состоянии механизма раскрытия анастомозного кольца устройства ФИГУРЫ 1.
ФИГУРА 8 - вид в перспективе в разрезе, в разобранном состоянии проксимальной части устройства ФИГУРЫ 1 с наполовину удаленным левым корпусом.
ФИГУРА 9 - вид сечения дистальной части устройства ФИГУРЫ 1.
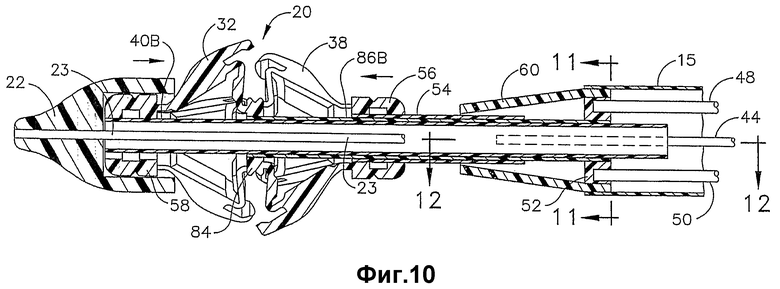
ФИГУРА 10 - вид сечения механизма раскрытия анастомозного кольца устройства ФИГУРЫ 1 в приведенном в действие положении.
ФИГУРА 11 - вид поперечного сечения, выполненного по плоскости 11 устройства ФИГУРЫ 10.
ФИГУРА 12 - частичный вид сечения, выполненного по плоскости 12 инструмента ФИГУРЫ 10.
ФИГУРА 13 - частичный вид сечения проксимальной части устройства ФИГУРЫ 1 в приведенном в действие положении.
ФИГУРА 14 - вид сечения, выполненного по плоскости 14 устройства ФИГУРЫ 13.
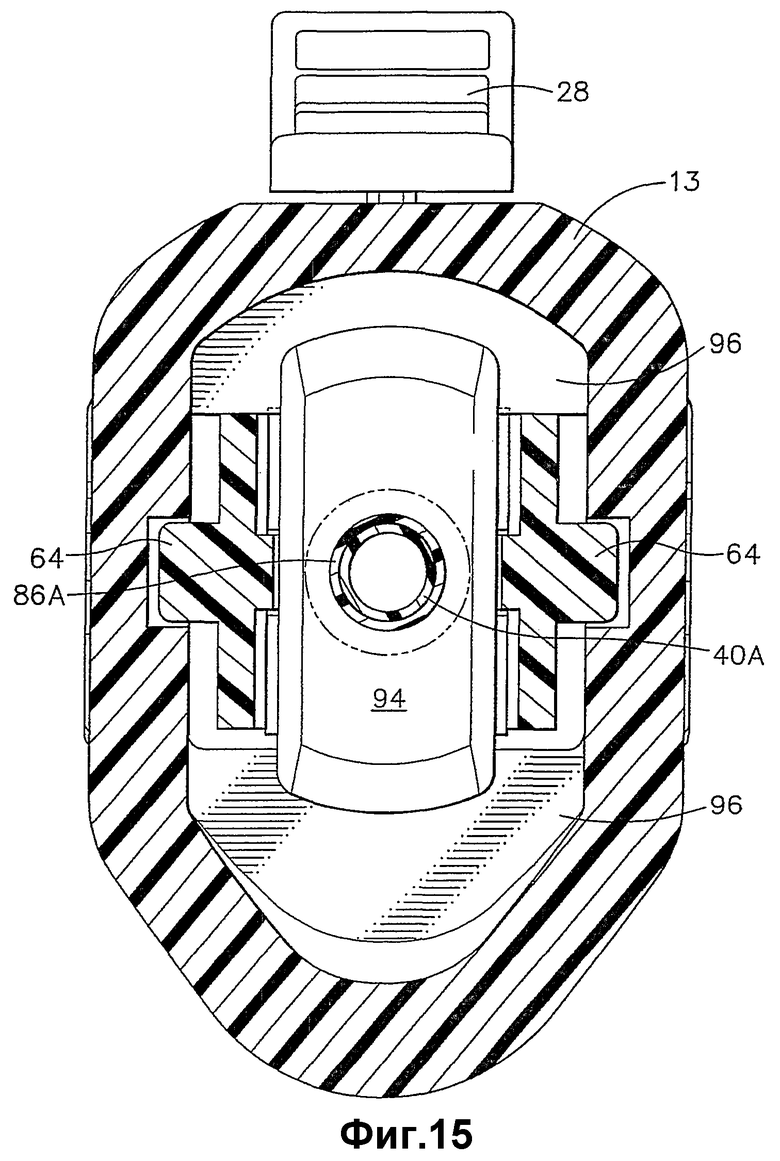
ФИГУРА 15 - вид сечения, полученного по плоскости 15 устройства ФИГУРЫ 13.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ИСПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
При обращении к чертежам, на которых сходные цифры обозначают сходные элементы на протяжении нескольких изображений, Фиг.1 изображает аппликатор 10, которым управляют таким образом, чтобы развернуть и привести в действие устройство - анастомозное кольцо (не изображенное на Фиг.1) из, в целом, цилиндрической формы до устройства, обладающего свойствами полой заклепки, или кольца, способного к формированию анастомотического скрепления на участке, предназначенном для анастомозирования, таком как обходной желудочный анастомоз при ожирении у пациента, страдающего патологическим ожирением. На Фиг.2 изображен еще один аппликатор 12. Следует принять во внимание, что аппликаторы 10, 12 могут использоваться разнообразными способами, включающими в себя, но не ограниченнными лапароскопическим или эндоскопическим. Аппликатор 12 показан на Фиг.2 с наличием анастомозного кольца 14 на механизме раскрытия 16. На Фиг.2 анастомозное кольцо 14 показано в сжатом положении в форме цилиндра. На Фиг.3 механизм раскрытия 16 аппликатора 12 перевел анастомозное кольцо 14 в приведенное в действие положение в форме полой заклепки. Фиг.4 представляется собой вид крупным планом анастомозного кольца 14 в приведенном в действие положении. Анастомозное кольцо 14 может содержать материал, обладающий эффектом памяти формы (SME), такой как нитинол, приведенный только в качестве примера, что дополнительно способствует приведению в действие к сцепляющей форме полой заклепки. Другие подходящие материалы для анастомозного кольца 14 являются очевидными для рядового специалиста в данной области техники. Приведенное в качестве примера анастомозное кольцо 14 описано подробно в опубликованной патентной заявке США № США 2003/0032967, Park et al.
Следует принять во внимание, что термины "проксимальный" и "дистальный" используются в настоящем описании, имея в виду захватывание клиницистом рукоятки аппликатора 10. Следует также принять во внимание, что для удобства и ясности пространственные термины, такие как "правый", "левый", "вертикальный" и "горизонтальный", используются в настоящей заявке применительно к чертежам. Однако хирургические инструменты используются во многих пространственных направлениях и положениях, и эти термины не предназначены являться ограничивающими и абсолютными. Кроме того, аспекты изобретения находят применение в хирургических операциях, выполняемых эндоскопическим и лапароскопическим способом, так же как в открытой операции или в других операциях. Использование в настоящем описании одного из указанных или родственных терминов не должно истолковываться как ограничивающее настоящее изобретение применением только в одной категории хирургических операций.
При ссылке на Фиг.1, 5 и 6 аппликатор 10 настоящего примера содержит рукоятку 13 и удлиненный ствол 15, содержащий проксимальную часть 17 и дистальную часть 18. Дистальная часть 18 содержит механизм раскрытия анастомозного кольца 20 и наконечник 22. Наконечник 22 прикреплен к аппликатору 10 посредством трубчатой тяги 23. Альтернативно или дополнительно наконечник 22 может быть присоединен к дистальной части механизма раскрытия анастомозного кольца 20. Как показано также на Фиг.1, ствол 15 также содержит гибкое сочленение 24, которое позволяет хирургу сгибать дистальную часть 18 ствола 15 и механизм раскрытия анастомозного кольца 20, размещенный на ней. Хотя в иллюстративном варианте исполнения на Фиг.1, 5, и 6 изображен ствол 15, имеющий только единственное гибкое сочленение 24, следует принять во внимание, что ствол 15 может содержать множество гибких сочленений 24 для достижения больших возможностей сгибания или в других целях. Гибкое сочленение 24, как показано, является ребристым, что может способствовать гибкости. Безусловно, гибкое сочленение 24 может содержать разнообразие альтернативных конфигураций.
На Фиг.5 дистальная часть 18 ствола 15 показана согнутой в направлении вверх посредством зацепления коромыслового элемента управления 26, который приспособлен, чтобы сгибать ствол 15 в области гибкого сочленения 24. Коромысло 26 шарнирно закреплено на стволе 15 таким образом, что оно может приводиться в действие из нейтрального положения в одно их двух направлений, чтобы осуществлять сгибание гибкого сочленения 24 вверх или вниз в одной плоскости. Безусловно, коромысловый элемент управления 26 является просто иллюстративным, и разнообразие альтернативных средств, способов или механизмов может быть использовано для того, чтобы осуществить сгибание ствола 15 в области сочленения 24 или в другом месте. Кроме того, следует принять во внимание, что ствол 15 может иметь конфигурацию, позволяющую осуществлять манипуляции для сгибания более чем в одной плоскости. Подходящие альтернативные конфигурации для обеспечения сгибания ствола 15, включающие в себя, но не ограничивающиеся сгибанием в одной или множестве плоскостей, будут очевидны рядовому специалисту в данной области техники.
Первый элемент управления раскрытием анастомозного кольца 28 показан на Фиг.5, где стрелка 30 показывает движение из не приведенного в действие положения в приведенное в действие положения. Приведение в действие первого элемента управления 28 может быть организовано таким образом, чтобы приводить в действие множество дистальных пальцевых захватов 32 механизма раскрытия анастомозного кольца 20, как показано на Фиг.5, для приведения в действие дистальной части анастомозного кольца. Кроме того, или альтернативно первым элементом управления раскрытием анастомозного кольца 28 можно манипулировать для приведения в действие множества проксимальных пальцевых захватов 38.
На Фиг.6 изображен второй элемент управления раскрытием анастомозного кольца 34, где стрелка 36 показывает движение из не приведенного в действие положения в приведенное в действие положение. Приведение в действие второго элемента управления 34 может быть организовано таким образом, чтобы приводить в действие множество проксимальных пальцевых захватов 38 механизма раскрытия анастомозного кольца 20, как показано на Фиг.6, для раскрытия проксимальной части анастомозного кольца. Кроме того, или альтернативно, вторым элементом управления раскрытием анастомозного кольца 34 можно манипулировать для приведения в действие множества дистальных пальцевых захватов 32.
Рядовым специалистам в данной области техники будет понятно, что первый и второй элементы управления раскрытием анастомозного кольца 28, 34 приведены просто в качестве примера. Соответственно, разнообразие альтернативных средств, способов или механизмов может быть использовано для приведения в действие дистальных пальцевых захватов 32 и/или проксимальных пальцевых захватов 38.
При ссылке теперь на Фиг.7 дистальная часть 18 ствола 15 показана в разобранном виде для изображения одной из примерных конфигураций, выполненной для сообщения движения дистальным пальцевым захватам 32 и проксимальным пальцевым захватам 38 через гибкое сочленение 24. Проксимальнее гибкого сочленения 24 изображена часть ствола 15, содержащая ряд концентрических трубок. Внутренняя трубка 40A тянется продольно сквозь базовую трубку 86A. Базовая трубка 86A тянется продольно сквозь внешнюю трубку 42, и дистальный конец базовой трубки 86A упирается в проксимальный конец гибкого сочленения 24. В одном из вариантов исполнения дистальный конец базовой трубки 86A упирается в проксимальный конец гибкого сочленения 24. В еще одном варианте исполнения дистальный конец базовой трубки 86A закреплен на проксимальном конце гибкого сочленения 24.
Пара проксимальных частей тяги 44 тянется дистально из внешней трубки 42 и неподвижно закреплена на ней. Дистальная часть тяги 23 тянется дистально из внутренней трубки 40A и неподвижно закреплена на ней. Дистальная часть тяги 23 и проксимальные части тяги 44 тянутся через нейтральную плоскость гибкого сочленения 24. В этом варианте исполнения ориентация дистальной части тяги 23 и проксимальных частей тяги 44 относительно друг друга не изменяется при сгибании гибкого сочленения 24. Рядовым специалистам в данной области техники будет понятно, что разнообразие альтернативных конфигураций может использоваться, включающих в себя, но не ограничивающихся альтернативными трубкам 40A, 86A, 42 и/или тягам 44, 23.
Тянуще/толкающие тяги 48, 50 проходят через плоскость сгибания гибкого сочленения 24. Тянуще/толкающие тяги 48, 50 заканчиваются в анкерном элементе 52 и неподвижно закреплены на нем. В одном из вариантов исполнения анкерный элемент 52 упирается в дистальный конец гибкого сочленения 24. В еще одном варианте исполнения анкерный элемент 52 фиксируют к дистальному концу гибкого сочленения 24. Другие подходящие конфигурации будут очевидны рядовым специалистам в данной области техники.
Проксимальные части тяги 44 тянутся от дистального конца гибкого сочленения 24, проходят через анкерный элемент 52 и неподвижно соединены с проксимальной трубкой 54. Дистальный конец проксимальной трубки 54 неподвижно соединяется с проксимальным кольцом 56, которое прикреплено к основанию проксимальных пальцевых захватов 38.
Как показано на Фиг.7, 9, и 10, дистальная часть тяги 23 тянется от дистального конца гибкого сочленения 24, проходит через анкерный элемент 52 и жестко соединяется с наконечником 22. Наконечник 22 соединен с дистальным кольцом 58, которое прикреплено к основанию дистальных пальцевых захватов 32. Дополнительно внутренняя трубка 40B соединена с дистальным кольцом 58 и размещена с возможностью перемещения внутри базовой трубки 86B. Следует принять во внимание, что дистальная часть тяги 23 может быть жестко связана с внутренней трубкой 40B в дополнение или как альтернатива присоединению к наконечнику 22. Безусловно, если дистальная часть тяги 23 жестко связана с внутренней трубкой 40B, нет необходимости в том, чтобы дистальная часть тяги 23 проходила до наконечника 22. Другие альтернативные конфигурации будут очевидны для рядового специалиста в данной области техники.
Аппликатор 10 дополнительно содержит переходной элемент 60 (Фиг.12) для перехода между стволом 15 и меньшим диаметром механизма раскрытия анастомозного кольца 20. В одном из вариантов исполнения анкерный элемент 52 фиксируют к переходному элементу 60. Хотя переходной элемент 60 показан имеющим в целом форму усеченного конуса, следует принять во внимание, что переходной элемент может иметь разнообразие альтернативных конфигураций.
В альтернативном варианте исполнения инсуфляционный канал тянется продольно от воздушного канала (не изображено) на рукоятке 13 через аппликатор 10 к наконечнику 22. Следует принять во внимание, что дистальная часть тяги 23 может быть заменена полым элементом, который выполнен с возможностью выполнять двойную функцию дистальной части тяги 23 и инсуфляционного канала, только в качестве примера. Альтернативно инсуфляционный канал может быть коаксиально совмещенным с дистальной частью тяги 23 или может располагаться смежно с дистальной частью тяги 23. Аналогично может использоваться более чем одна дистальная часть тяги 23. Еще другие подходящие конфигурации для обеспечения инсуфляционного канала и/или различной дистальной части тяги 23 будут очевидны рядовому специалисту в данной области техники.
Теперь при ссылке на Фиг.8 проксимальная часть 17 ствола 15 и рукоятка 13 показаны в разобранном виде с удаленной правой половиной ствола 15 для изображения одной из конфигураций для сообщения движения дистальным пальцевым захватам 32, проксимальным пальцевым захватам 38 и гибкому сочленению 24. Каждый из первого и второго элементов управления раскрытием анастомозного кольца 28, 34, содержит пару желобков 62, которые выполнены с возможностью скольжения по направляющей 64 рукоятки 13 (Фиг.15). Продольная длина хода первого элемента управления 28 может быть ограничена размером паза 66, тогда как длина хода второго элемента управления 34 может быть ограничена размером паза 68.
Коромысло 26 шарнирно прикреплено к проксимальной части 17 ствола 15 посредством стержня 70. Проксимальная часть 17 ствола 15 включает в себя пару отверстий 90, выполненных с возможностью приема стержней 70. Каждая из тянуще/толкающих тяг 48, 50 содинена со стволом 15 и коромыслом 26 посредством стержней 72 (Фиг.14). Проксимальная часть 17 ствола 15 включает в себя пару радиальных пазов 92, выполненных с возможностью приема стержней 72. Как показано на Фиг.8 и 14, коромысло 26 содержит верхнюю часть 74 и нижнюю часть 76. Тянуще/толкающая тяга 48 соответствует верхней части 74 коромысла 26, тогда как тянуще/толкающая тяга 50 соответствует нижней части 76. В этом варианте исполнения тянуще/толкающие тяги 48, 50 разделены пространственно друг от друга в плоскости сгибания гибкого сочленения 24, таким образом, приведение в действие коромысла 26 в первом направлении заставляет тянуще/толкающую тягу 48 перемещаться проксимально и тянуще/толкающую тягу 50 перемещаться дистально, вызывая сгибание гибкого сочленение 24 вверх, как показано на Фиг.5 и 6. Аналогично приведение в действие коромысла 26 во втором направлении заставляет тянуще/толкающую тягу 48 перемещаться дистально, а тянуще/толкающую тягу 50 перемещаться проксимально, вызывая сгибание гибкого сочленения 24 вниз.
Безусловно, может использоваться любая подходящая замена коромысла 26 и/или в дополнение к нему. Только в качестве примера коромысло 26 можно заменить ручкой или другим элементом, выполненным с возможностью углового перемещения, установленным на рукоятке 13 или в любом другом месте. При использовании ручки или подобного элемента вместо коромысла 26, тянуще/толкающие тяги 48, 50 могут быть соединены с ним таким образом, что вращение кнопки или подобного элемента вызывает сгибание в области сгибающегося сочленения 24. Еще другие подходящие альтернативные конфигурации будут очевидны рядовым специалистам в данной области техники.
В настоящем примере первый элемент управления раскрытием анастомозного кольца 28 выполнен для управления дистальными пальцевыми захватами 32 и второй элемент управления раскрытием анастомозного кольца 34 выполнен для управления проксимальными пальцевыми захватами 38. Второй элемент управления 34 зафиксирован на проксимальной части 78 направляющей 64. Направляющая 64 может перемещаться в пределах рукоятки 13. Дистальная часть 80 направляющей 64 зафиксирована к ползуну 82. Ползун 82 жестко соединен c внешней трубкой 42. Продольное движение второго элемента управления 34, таким образом, вызывает соответствующее продольное движение направляющей 64, ползуна 82 и внешней трубки 42. Как описано выше со ссылкой на Фиг.7, внешняя трубка 42 соединена с проксимальными частями тяги 44 и таким образом является манипулируемой, чтобы сообщить движение проксимальным пальцевым захватам 38 через гибкое сочленение 24.
Первый элемент управления 28 жестко соединен с внутренней трубкой 40A. Внутренняя трубка 40A тянется продольно через базовую трубку 86A, которая тянется продольно через внешнюю трубку 42. Внутренняя трубка 40A выполнена для сообщения движения дистальным пальцевым захватам 32. Таким образом, первый элемент управления 28 выполнен с возможностью управления дистальными пальцевыми захватами 38 и второй элемент управления 34 является манипулируемым для управления проксимальными пальцевыми захватами 38. Следует отметить, что хотя первый элемент управления 28 выполнен с возможностью скольжения по направляющей 64, он не является статически присоединенным к нему. Следовательно, продольное движение направляющей 64 посредством движения второго элемента управления 34 не будет вызывать какого-либо перемещения первого элемента управления 28.
В настоящем примере проксимальный конец базовой трубки 86A зафиксирован к анкерному элементу 94. Анкерный элемент 94 имеет такую конфигурацию, чтобы войти в зацепление с упорами 96 в рукоятке 13, таким образом, предотвращая относительное движение между рукояткой 13 и базовой трубкой 86A.
Рядовому специалисту в данной области техники будет понятно, что разнообразие альтернативных компонентов и/или конфигураций может использоваться, чтобы осуществить приведение в действие дистальных пальцевых захватов 32 и/или проксимальных пальцевых захватов 38. Только в качестве примера, одна из альтернативных конфигураций может включать в себя придание второму элементу управления 34 такой конфигурации, чтобы он являлся манипулируемым для управления приведением в действие дистальных пальцевых захватов 32 и придание первому элементу 28 управления такой конфигурации управления, чтобы быть манипулируемым для управления приведением в действие проксимальных пальцевых захватов 38. Другие подходящие изменения будут очевидны рядовым специалистам в данной области техники.
На Фиг.9 показан механизм раскрытия анастомозного кольца 20 в не приведенном в действие положении. На Фиг.10 показан механизм раскрытия анастомозного кольца 20 в приведенном в действие положении. На Фиг.10 изображено то, каким образом движение в проксимальном направлении дистального кольца 58 (обусловленное движением в проксимальном направлении дистальной тяги и/или внутренней трубки 40B) приводит к движению дистального кольца 58 по направлению к неподвижно закрепленному срединному кольцу 84 механизма раскрытия анастомозного кольца 20. Срединное кольцо 84 зафиксировано к базовой трубке 86B. Базовая трубка 86B зафиксирована к анкерному элементу 52. Следовательно, в настоящем примере не происходит относительного движения между базовой трубкой 86B и стволом 15 или срединным кольцом 84 при манипулировании аппликатором 10. Дистальные пальцевые захваты 32 связаны двухшарнирно со срединным кольцом 84, таким образом, движение в проксимальном направлении дистального кольца 58 заставляет концевые части дистальных пальцевых захватов 32 отгибаться наружу и раскрывать дистальную часть анастомозного кольца. Дистальные пальцевые захваты 32 имеют такую конфигурацию, чтобы удерживать дистальную часть анастомозного кольца посредством зацепления створками 51 перед раскрытием анастомозного кольца и во время него и высвобождения створок 51 после раскрытия анастомозного кольца.
Аналогично тому, как показано на Фиг.10, проксимальная трубка 54 жестко соединена с проксимальным кольцом 56 таким образом, что движение в дистальном направлении проксимальной трубки 54 заставляет проксимальное кольцо 56 двигаться по направлению к срединному кольцу 84. Проксимальные пальцевые захваты 38 и срединное кольцо 84 находятся в двухшарнирной связи, таким образом, движение в дистальном направлении проксимального кольца 56 заставляет концевые части проксимальных пальцевых захватов 38 отгибаться наружу и раскрывать проксимальную часть анастомозного кольца. Проксимальные пальцевые захваты 38 имеют такую конфигурацию, чтобы удерживать проксимальную часть анастомозного кольца посредством зацепления створками 51 перед раскрытием анастомозного кольца и во время него и высвобождения створок 51 после раскрытия анастомозного кольца.
Хотя пальцевые захваты 32, 38 показаны и описаны как отгибающиеся наружу посредством двухшарнирной связи со срединным кольцом 84, следует принять во внимание, что может использоваться разнообразие других конфигураций механизма раскрытия анастомозного кольца 20 для осуществления раскрытия анастомозного кольца. Такие альтернативные конфигурации будут очевидными для рядовых специалистов в данной области техники.
На Фиг.11 показано фронтальное поперечное сечение гибкого сочленения 24. Сгибающие тянуще/толкающие тяги 48, 50 показаны ориентированными в одном направлении в плоскости сгиба, позволяя осуществлять зацепление коромысла 26 для сгибания гибкого сочленение 24 в плоскости сгибания. Проксимальные части тяги 44 также показаны по обе стороны внутренней трубки 40, сквозь которую проходит дистальная часть тяги 23.
На Фиг.13 показано поперечное сечение проксимальной части 17 ствола 15 и рукоятки 13. На Фиг.13 второй элемент управления 34 показан выдвинутым к дистальному концу щели 68, толкая ползун 82 и внешнюю трубку 42 в дистальном направлении, заставляя проксимальные пальцевые захваты 38 отводиться наружу, как показано на Фиг.10. На Фиг.13 также изображена верхняя часть 74 коромысла 26, отведенная проксимально. Это, как изображено, заставляет тянуще/толкающую тягу 48 перемещаться проксимально и тянуще/толкающую тягу 50 перемещаться дистально, заставляя гибкое сочленение 24 согнуться вверх, как показано на Фиг.5.
Показав и представив описание различных вариантов исполнения и концепции изобретения, дополнительная адаптация способов и систем, описанных здесь, может быть произведена соответствующей модификацией рядовым специалистом в данной области техники без отступления от объема притязаний изобретения. Несколько из таких потенциальных альтернатив, модификаций и вариантов были упомянуты, а другие будут очевидны квалифицированному специалисту в данной области техники в свете предшествующего описания. Соответственно, изобретение предполагает охватить все указанные альтернативы, модификации и варианты изменения, которые могут быть в пределах сущности и объема притязаний прилагаемой формулы изобретения и не должны пониматься как ограничивающиеся деталями конструкции и операций, показанными и описанными в описании и чертежах. Дополнительные преимущества могут быть выявлены квалифицированными специалистами в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППЛИКАТОРЫ ДЛЯ ВЫДАЧИ ХИРУРГИЧЕСКИХ КРЕПЛЕНИЙ, СОДЕРЖАЩИЕ ШАРНИРНЫЕ СТВОЛЫ И ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ШАРНИРНЫМ ПОВОРОТОМ | 2016 |
|
RU2719950C2 |
| БЕЗОБОЛОЧКОВОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ АНАСТОМОЗНОГО КОЛЬЦА | 2006 |
|
RU2426505C2 |
| ПОДДЕРЖИВАЮЩИЕ КОНСТРУКЦИИ ПУСКОВОЙ ШТАНГИ, ВЫПОЛНЕННОЙ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ, ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА | 2016 |
|
RU2727765C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЛОКИРОВКОЙ ШАРНИРА, ИМЕЮЩЕЙ ДВОЙНУЮ СТОПОРНУЮ ПРУЖИНУ | 2014 |
|
RU2676516C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА C СОСТАВНЫМИ СТРУКТУРАМИ ПУСКОВОЙ ШТАНГИ С ЦЕНТРАЛЬНЫМ ПУСКОВЫМ ОПОРНЫМ ЭЛЕМЕНТОМ ДЛЯ ПОДДЕРЖАНИЯ ШАРНИРНОГО ПОВОРОТА | 2016 |
|
RU2721296C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ШАРНИРНЫМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2011 |
|
RU2577942C2 |
| КОНСТРУКЦИИ СИСТЕМЫ ДВУХШАРНИРНОГО ПРИВОДА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА | 2016 |
|
RU2717936C2 |
| ХИРУРГИЧЕСКИЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ С КОНСТРУКЦИЯМИ ДЛЯ ПРИНУДИТЕЛЬНОГО ОТКРЫТИЯ БРАНШЕЙ | 2016 |
|
RU2721646C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |











Хирургический инструмент для установки устройства анастомозного кольца содержит рукоятку, соединенную с механизмом раскрытия анастомозного кольца посредством ствола. Ствол имеет, по меньшей мере, одно гибкое сочленение, которое способно сгибаться, по меньшей мере, в одном направлении, чтобы позволить хирургу изменять угол доступа, чтобы компенсировать неудобное размещение канала троакара, через который введен инструмент. Гибкое сочленение может содержать ребристый элемент. Одна или более тяг могут использоваться для осуществления сгибания гибкого сочленения. В результате хирург может изменять угол доступа на участке анастомоза, таком как анастомоз желудка и тощей кишки, когда каналы троакара были установлены неправильно. 3 н. и 16 з.п. ф-лы, 15 ил.
1. Хирургический инструмент для имплантации устройства анастомозного кольца, содержащий:
рукоятку;
механизм раскрытия анастомозного кольца, выполненный с возможностью приема и раскрывания устройства анастомозного кольца; и
удлиненный ствол, соединяющий рукоятку с механизмом раскрытия анастомозного кольца, при этом удлиненный ствол выполнен с возможностью передачи приводящего в действие усилия от рукоятки к механизму раскрытия анастомозного кольца, и удлиненный ствол включает в себя гибкое сочленение, выполненное с возможностью сгибания удлиненного ствола;
элемент управления сочленением, выполненный для управления сгибанием гибкого сочленения;
пару тянуще/толкающих тяг, выполненных с возможностью сгибания гибкого сочленения, при этом пара тянуще/толкающих тяг соединяет элемент управления сочленением с гибким сочленением;
при этом элемент управления сочленением содержит коромысло шарнирно соединенное с удлиненным стволом.
2. Хирургический инструмент по п.1, в котором пара тянуще/толкающих тяг ориентирована в одном направлении в плоскости сгиба.
3. Хирургический инструмент по п.2, в котором коромысло выполнено с возможностью перемещения из нейтрального положения в первое активизированное положение для сгибания гибкого сочленения в первом направлении.
4. Хирургический инструмент по п.3, в котором коромысло выполнено с возможностью перемещения из нейтрального положения во второе активизированное положение для сгибания гибкого сочленения во втором направлении.
5. Хирургический инструмент по п.4, в котором первая из тянуще/толкающих тяг выполнена с возможностью перемещения в дистальном направлении в ответ на перемещение коромысла в первое положение.
6. Хирургический инструмент по п.5, в котором вторая из тянуще/толкающих тяг выполнена с возможностью перемещения проксимально в ответ на перемещение коромысла в первое положение.
7. Хирургический инструмент по п.6, в котором вторая из тянуще/толкающих тяг выполнена с возможностью перемещения дистально в ответ на перемещение коромысла во второе положение.
8. Хирургический инструмент по п.7, в котором первая из тянуще/толкающих тяг выполнена с возможностью перемещения проксимально в ответ на перемещение коромысла во второе положение.
9. Хирургический инструмент по п.1, в котором механизм раскрытия анастомозного кольца содержит множество дистальных пальцевых захватов, принимающих и раскрывающих дистальную часть анастомозного кольца.
10. Хирургический инструмент по п.9, дополнительно содержащий первый элемент управления раскрытием, выполненный с возможностью сообщения первого приводящего в действие усилия дистальным пальцевым захватам, где дистальные пальцевые захваты приводятся в действие в ответ на первое приводящее в действие усилие.
11. Хирургический инструмент по п.10, дополнительно содержащий, по меньшей мере, одну дистальную тягу, выполненную с возможностью сообщения первого приводящего в действие усилия от первого элемента управления раскрытием через гибкое сочленение дистальным пальцевым захватам.
12. Хирургический инструмент по п.11, дополнительно содержащий внутреннюю трубку, выполненную с возможностью сообщения первого усилия приведения в действие от первого элемента управления раскрытием к, по меньшей мере, одной дистальной тяге.
13. Хирургический инструмент по п.12, в котором механизм раскрытия анастомозного кольца дополнительно содержит множество проксимальных пальцевых захватов, принимающих и раскрывающих проксимальную часть анастомозного кольца.
14. Хирургический инструмент по п.13, дополнительно содержащий второй элемент управления раскрытием, выполненный с возможностью сообщения второго приводящего в действие усилия проксимальным пальцевым захватам, где проксимальные пальцевые захваты приводятся в действие в ответ на второе приводящее в действие усилие.
15. Хирургический инструмент по п.14, дополнительно содержащий, по меньшей мере, одну проксимальную часть тяги, выполненную с возможностью сообщения второго приводящего в действие усилия от второго элемента управления раскрытием через гибкое сочленение к проксимальным пальцевым захватам.
16. Хирургический инструмент по п.15, дополнительно содержащий внешнюю трубку, выполненную с возможностью сообщения второго приводящего в действие усилия от второго элемента управления раскрытием к, по меньшей мере, одной проксимальной части тяги.
17. Хирургический инструмент по п.1, в котором гибкое сочленение содержит ребристый элемент.
18. Хирургический инструмент для имплантации устройства анастомозного кольца, содержащий:
рукоятку;
механизм раскрытия анастомозного кольца, содержащий множество элементов раскрытия кольца, выполненный с возможностью приема и раскрывания устройства анастомозного кольца;
удлиненный ствол, соединяющий рукоятку с механизмом раскрытия анастомозного кольца, где удлиненный ствол включает в себя гибкое сочленение, выполненное с возможностью сгибания удлиненного ствола;
элемент управления сочленением, выполненный для управления сгибанием гибкого сочленения;
по меньшей мере, одну тянуще/толкающую тягу для сгибания гибкого сочленения, при этом, по меньшей мере, одна пара тянуще/толкающих тяг соединяет элемент управления сочленением с гибким сочленением;
при этом элемент управления сочленением содержит коромысло, шарнирно соединенное с удлиненным стволом.
19. Хирургический инструмент для имплантации устройства анастомозного кольца, содержащий:
элемент приведения в действие, выполненный с возможностью приема анастомозного кольца, где приводящий в действие элемент способен к перемещению из цилиндрического, не приведенного в действие положения, в форму, образующую полую заклепку в ответ на, по меньшей мере, одно сжимающее приводящее в действие усилие;
рукоятку, включающую в себя приводящий в действие механизм для произведения, по меньшей мере, одного сжимающего приводящего в действие усилия; и
удлиненный ствол, соединяющий рукоятку с приводящим в действие элементом и выполненный с возможностью передачи, по меньшей мере, одного сжимающего приводящего в действие усилия от рукоятки к приводящему в действие элементу, при этом ствол содержит гибкое сочленение;
элемент управления сочленением, выполненный для управления сгибанием гибкого сочленения;
пару тянуще/толкающих тяг, выполненных с возможностью сгибания гибкого сочленения, при этом пара тянуще/толкающих тяг соединяет элемент управления сочленением с гибким сочленением;
при этом элемент управления сочленением содержит коромысло, шарнирно соединенное с удлиненным стволом.
| Хирургический сшивающий аппарат | 1987 |
|
SU1503766A1 |
| US 4576167 А, 18.03.1986 | |||
| Устройство для наложения желчеотводящих анастомозов | 1989 |
|
SU1821157A1 |
| Хирургический сшивающий аппарат | 1987 |
|
SU1616624A1 |
| Способ асептической резекции кишки и устройство для его осуществления | 1985 |
|
SU1309972A1 |
| Компрессионный зонд | 1987 |
|
SU1595529A1 |
| US 4703887 А, 03.11.1987. | |||

