Область техники изобретения
Настоящее изобретение относится, в общем, к установкам подземного бурения и способам управления подземным бурением. Конкретнее, настоящее изобретение относится к установкам подземного бурения для использования в горизонтально-наклонном бурении и усовершенствованным способу и устройству для установления полного диапазона перемещения устройства ввода данных управления оператора по настройке уменьшенной производительности и настройке ручного управления регулятора.
Предпосылки создания изобретения
Линии инженерных коммуникаций воды, электричества, газа, телефона и кабельного телевидения часто прокладывают под землей по соображениям безопасности и эстетического характера и другим причинам. В некоторых случаях подземные инженерные коммуникации укладывают в траншею, которую затем закапывают. Рытье траншей может являться затратным по времени и обуславливать существенные повреждения существующих структур или дорог. Вследствие этого горизонтально-наклонное бурение часто используют для исключения указанных недостатков.
Обычная установка горизонтально-наклонного бурения включает в себя раму, на которой установлен механизм привода вращения. Механизм привода вращения может перемещаться со скольжением вдоль продольной осевой линии рамы для вращения бурильной колонны вокруг продольной осевой линии, со скольжением, при этом вдоль рамы для продвижения бурильной колонны в грунт или извлечения ее из грунта. Бурильная колонна содержит одну или несколько бурильных штанг, скрепленных вместе в колонну.
Бурильный инструмент устанавливают на передний конец бурильной колонны (то есть конец, дальний от установки горизонтально-наклонного бурения). Более конкретно, буровое долото используют при продвижении бурильной колонны в грунт. С другой стороны, используют расширитель для увеличения пробуренной скважины, когда бурильную колонну извлекают после проходки скважины. Бурильные инструменты могут включать в себя различные режущие устройства для грунта, оптимизированные для конкретных пород. Примеры включают режущие кромки, срезающие грунт, и элементы сжатия, концентрирующие продольное усилие от бурильной колонны на ограниченной площади для растрескивания грунта при бурении в условиях скальной породы.
Буровые установки включают в себя органы управления, позволяющие оператору управлять как вращением, так и продольным перемещением, также именуемым осевым напором. Оптимальная настройка вращения и продольного перемещения зависит от различных факторов, таких как грунтовые условия, порода и тип бурильного инструмента. Процесс бурения, в общем, требует поддержания устойчивого давления осевого напора и контроля скорости при низком осевом напоре.
В некоторых неоднородных условиях бурения, таких, когда пласт является ледниковым тиллом (например, скоплением разного размера горной породы, глины и ила), для устройств резки грунта первичное сцепление с пластом и эффективное бурение являются затруднительными. Поэтому при первичном сцеплении с пластами такого типа часто требуется очень низкое давление осевого напора для обеспечения начала резки устройством грунта.
Давления осевого напора является пропорциональным усилию осевого напора, и давление вращения является пропорциональным крутящему моменту. Во многих случаях давления осевого напора и вращения непосредственно связаны со скоростью осевого напора. Если давление осевого напора является чрезмерным, результатом проходки в пласт устройства резки грунта должны являться чрезмерные давления вращения. Часто заклинивание при вращении связано с высокими скоростями осевого напора, когда устройство резки грунта продвигается в пласт слишком быстро или со слишком высоким давлением осевого напора. Если устройство резки грунта заклинивает при вращении, возможные возникающие высокие нагрузки могут повредить бурильный инструмент и бурильную колонну и ухудшить показатели бурения в целом.
Если устройство резки грунта заклинивает, давления вращения и осевого напора должны быть уменьшены до нуля. Устройство резки грунта нужно переместить на короткое расстояние от препятствия в пласте. Оператор, используя орган управления вводом данных для вращения, повторно запускает процесс. После повторного запуска вращения бурильной колонны давления осевого напора увеличивают (скорость осевого напора) для повторной установки устройства резки грунта на плоскость забоя пласта, подлежащего бурению. Часто это давление осевого напора бывает меньше давления осевого напора, обуславливавшего условия заклинивания при вращении.
В идеальной системе управления, величины перемещения вращения и перемещений осевого напора являются пропорциональными положению органов управления вводом данных. То есть 100% входной сигнал управления от, например, ручки управления осевого напора или вращения, должен иметь результатом 100% управляющий выходной сигнал для осевого напора или вращения. Вместе с тем, в реальных системах управления, в результате собственных характеристик, связанных с функционированием органа управления (джойстик) и выходным устройством (гидравлическим насосом), может существовать накопленная мертвая зона в 5-10% в управлении вводом данных. То есть никакое управление производительностью не будет запущено, пока орган управления вводом данных достаточно не переместится для преодоления мертвой зоны системы. В данном случае, вследствие близкого к пропорциональному соотношению органов управления вводом данных с управлением на выходе, оператору может быть трудно поддерживать необходимые уровни малых скоростей осевого напора и давления осевого напора в положениях органов управления вводом данных.
Таким образом, при бурении в неоднородных условиях приблизительно 20-100% полезной функции управления вводом данных осевого напора могут являться не применимыми. В данных условиях необходимо управлять скоростями осевого напора с очень низкими значениями, например, в 10% от функции максимального управления вводом данных. Поэтому в технике возникает необходимость создания способа и системы, обеспечивающей возможность оператору регулировать органы управления для оптимизирования рабочего диапазона органов управления для обеспечения функции управления с низким значением на выходе, пропорциональной полномасштабному управлению вводом данных.
Сущность изобретения
Настоящее изобретение создает удобный способ, обеспечивающий оператору возможность изменения пропорционального соотношения между функцией органа управления ввода данных и устройством управления производительностью, когда бурильную колонну перемещают вдоль оси или поднимают. Например, может быть необходим сигнал управления вводом данных в 100%, при этом выходной сигнал может составлять 25%. При этом оператор имеет добавочное управление, без ограничения управлением системы бурения в мертвой зоне систем управления или вблизи нее.
Настоящее изобретение включает в себя контроллер для приема входных сигналов, включающих в себя сигналы настройки вращения и осевого напора, сигналы режима автоматического бурения и сигналы отмены режима автоматического бурения от органов управления для создания сигналов управления вращением и осевым напорным перемещением в ответ на входные сигналы и для подачи упомянутых сигналов управления перемещением для оперативного управления гидравлической системой и пропорционального управления между вводом и вводом.
Еще один аспект изобретения включает в себя устройство управления подземным бурильным инструментом. Устройство включает в себя гидравлическую систему, сообщающую бурильному инструменту вращение с регулируемой скоростью вращения или создающую регулируемый уровень крутящего момента в ответ на положение первого органа управления, и перемещение осевого напора с регулируемой скоростью, или создающую регулируемый уровень осевого напора в ответ на положение второго органа управления. Устройство также включает в себя третий орган управления, создающий сигнал настройки вращения и сигнал настройки осевого напора в ответ на положение органов управления, четвертый орган управления, приводимый в действие оператором и создающий сигнал для увеличения или уменьшения настройки вращения, и пятый орган управления, приводимый в действие оператором и создающий сигнал для увеличения или уменьшения настройки осевого напора. Устройство также включает в себя контроллер для приема входных сигналов от первого, второго, третьего, четвертого и пятого органов управления, приводимый в действие оператором, для создания сигналов управления вращением и осевым напором в ответ на входные сигналы, и передачи упомянутых сигналов управления для оперативного управления упомянутой гидравлической системой.
В общем, существует линейное соотношение между выходным и входным сигналами, составляющее приблизительно 1:1. То есть результатом одной процентной величины входного сигнала управления должна быть та же процентная величина выходного сигнала из контроллера на выходное устройство. Например, результатом входного сигнала в 50% органа управления должен быть выходной сигнал в 50%. В настоящем изобретении предпочтительно существует линейное соотношение между входным сигналом и выходным сигналом через коэффициент пропорциональности. Настоящее изобретение предоставляет оператору возможность, при осевом перемещении бурильной колонны, изменения соотношения выходного сигнала управления к любой величине в диапазоне 1:1 - 1:0,10 в отношении устройства ввода данных. Обычно устройством управления вводом данных установки горизонтально-наклонного бурения является джойстик, подающий сигнал на контроллер для индикации направления осевого перемещения бурильной колонны. В зависимости от логики программы, электронный контроллер подает сигнал на выходное устройство, которое обычно является гидравлическим насосом, или другим устройством, способным реагировать на данный сигнал. Для настоящей системы управления гидравлический насос оборудован электронным управлением рабочим объемом. То есть производительность насоса является пропорциональной величине выходного сигнала.
Настоящее изобретение (в режиме ручного управления) в нескольких вариантах осуществления может требовать от оператора ручного ввода данных, посредством установки джойстика в надлежащее положение, необходимого уровня скорости и/или давления для функций осевого напора и вращения. Переключатель, установленный вблизи оператора, используется оператором для определения необходимого уровня коэффициента пропорциональности между входным сигналом для осевого напора и выходными сигналами. Например, оператор может изменять коэффициент пропорциональности до значения 10, с получением в результате соответствующего максимального значения для выходного устройства в 10%, когда применен входной сигнал, составляющий 100%. Продолжая данный пример, если настоящее пропорциональное соотношение поддерживается и ввод данных установлен, скажем на 50%, тогда соответствующий выходной сигнал должен быть эквивалентен 5%.
Настоящее изобретение обеспечивает нормальную работу бурения с ручным управлением, но при появлении условий бурения, отклоняющихся от нормы, когда требуются скорости осевого напора, ниже нормальных, пропорциональное соотношение можно легко изменить переключением тумблера.
Другой аспект настоящего изобретения состоит в том, что после установки нового пропорционального соотношения, режим бурения с ручным управлением можно менять на режим бурения с автоматическим управлением без остановки идущего процесса бурения. Режим бурения с автоматическим управлением обеспечивает достижение надлежащих скоростей вращения и осевого напора и/или параметров давления, после чего система управления должна автоматически поддерживать данные настройки давления/скорости в пределах возможностей системы управления. Поскольку улучшенное управление оператору обеспечивает коэффициент пропорциональности, после того, как фактически начинается бурение в неоднородном или ином пласте, и давления вращения и осевого напора стабилизируются, оператор может использовать переключатель, использовавшийся для установки коэффициента пропорциональности, для установки режима бурения с автоматическим управлением. Вместе с тем, другие переключатели можно использовать для данной функции.
Еще один аспект настоящего изобретения заключается в том, что коэффициент пропорциональности можно быстро вернуть на 100% простой установкой обеих рукояток управления осевым напором и управления вращением в их нейтральные положения, затем нажать переключатель.
Другой аспект настоящего изобретения заключается в том, что, если установленное значение коэффициента пропорциональности требует изменения, его значение можно увеличивать или уменьшать на один процент или в любом другом подходящем интервале, посредством переключателя увеличения/уменьшения.
Хотя изобретение должно быть описано для конфигураций предпочтительных вариантов осуществления и устройств, используемых в данном документе, должно быть ясно, что изобретение не следует воспринимать ограниченным такими конфигурациями или компонентами, описанными в данном документе.
Также, хотя в данном документе описаны конкретные типы гидравлических насосов и двигателей, должно быть ясно, что такие конкретные механизмы не следует воспринимать, как ограничивающие. Вместо этого принципы данного изобретения распространяются на любое оборудование, в котором необходимо автоматическое поддержание различных состояний бурения. Эти и другие изменения изобретения должны стать ясными специалистам в данной области техники после рассмотрения подробного описания изобретения. Для лучшего понимания изобретения даны ссылки на чертежи, составляющие часть описания, на которых показаны и использованием которых описаны предпочтительные варианты осуществления изобретения.
Краткое описание чертежей
Прилагаемые чертежи, входящие в состав данного документа, составляют часть подробного описания, показывают ряд аспектов изобретения и вместе с описанием служат для объяснения принципов изобретения. Ниже приведено краткое описание чертежей.
На фиг.1 показана установка горизонтально-наклонного бурения.
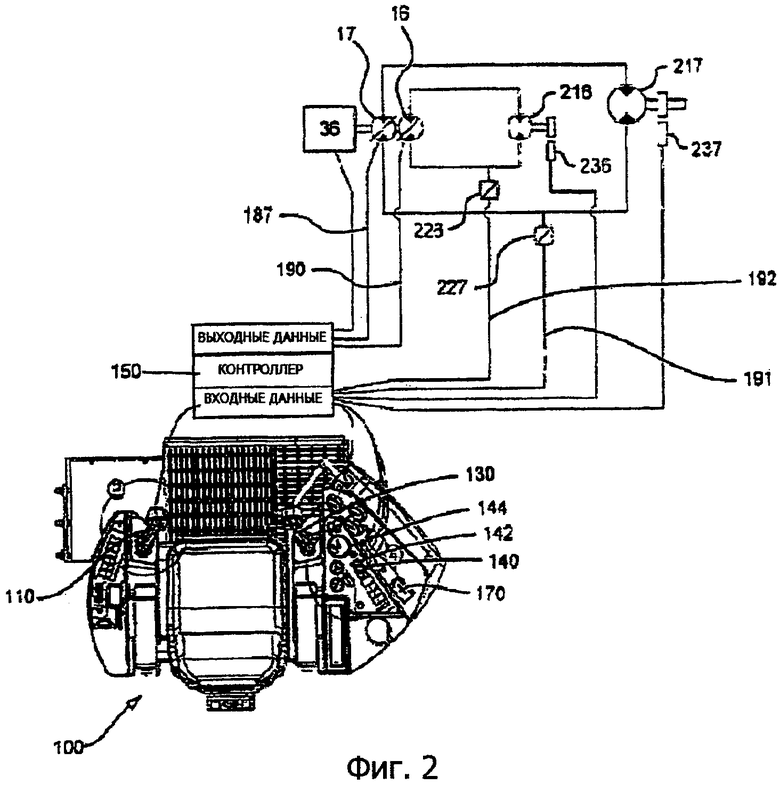
На фиг.2 показана станция управления оператора установки горизонтально-наклонного бурения согласно принципам настоящего изобретения.
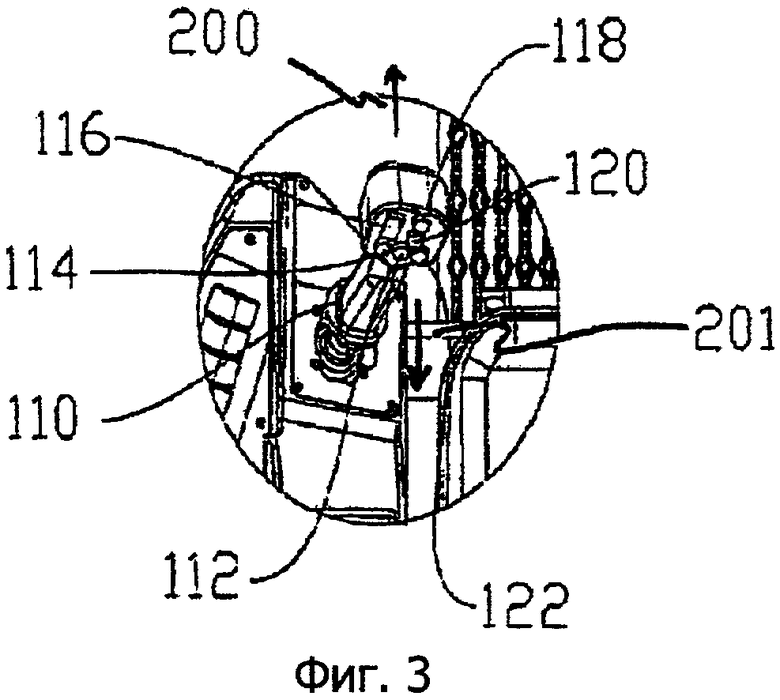
На фиг.3 показана рукоятка управления станции управления оператора фиг.2.
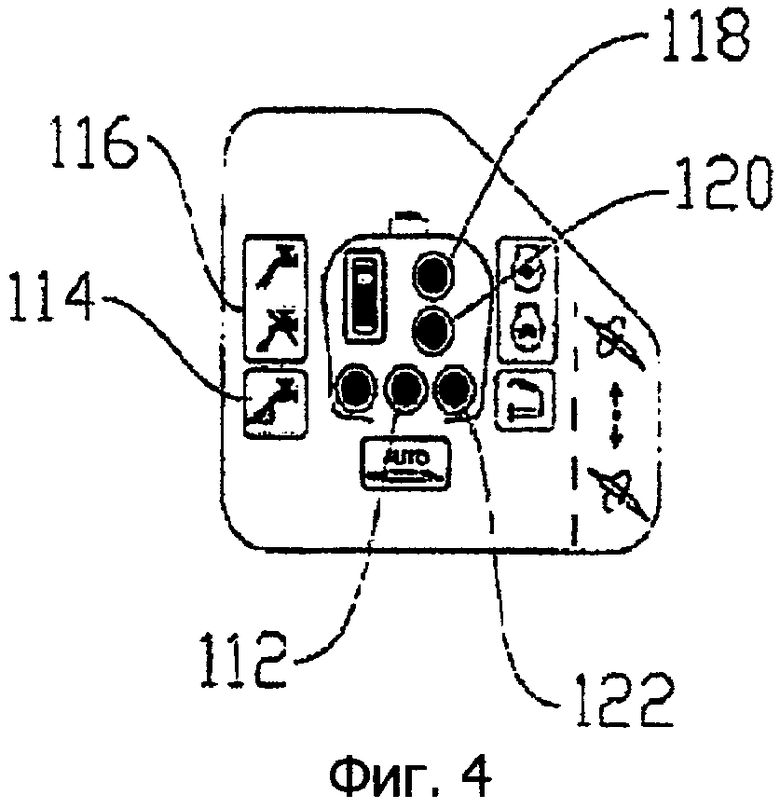
На фиг.4 показано обозначение, идентифицирующее функции органов управления, находящиеся на рукоятке управления фиг.3.
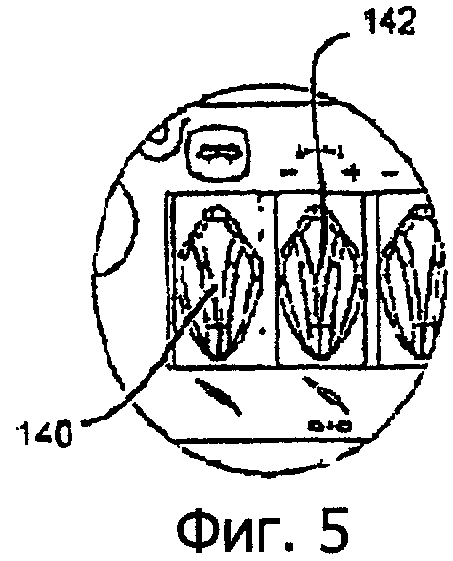
На фиг.5 показаны органы управления, находящиеся на правой стороне станции управления оператора фиг.2.
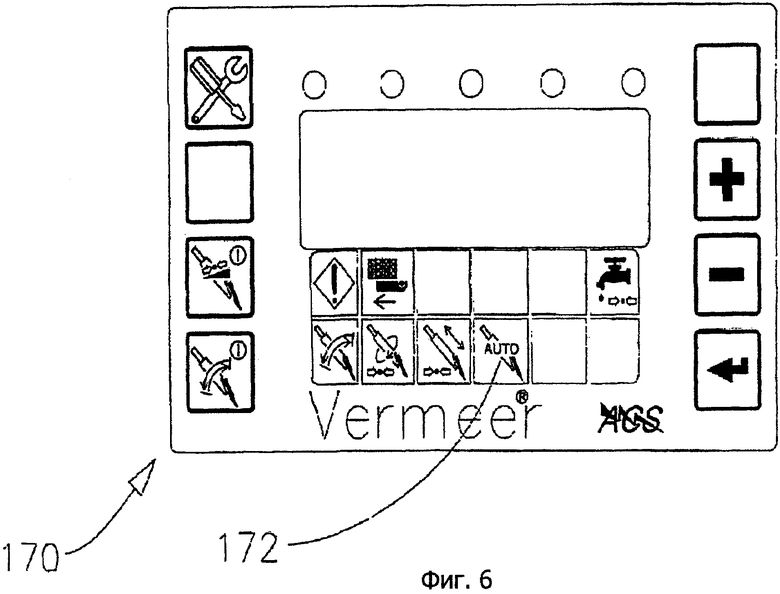
На фиг.6 показан дисплей согласно принципам настоящего изобретения.
На фиг.7 показан график скорости увеличения вращения и осевого напора при возобновлении процесса бурения.
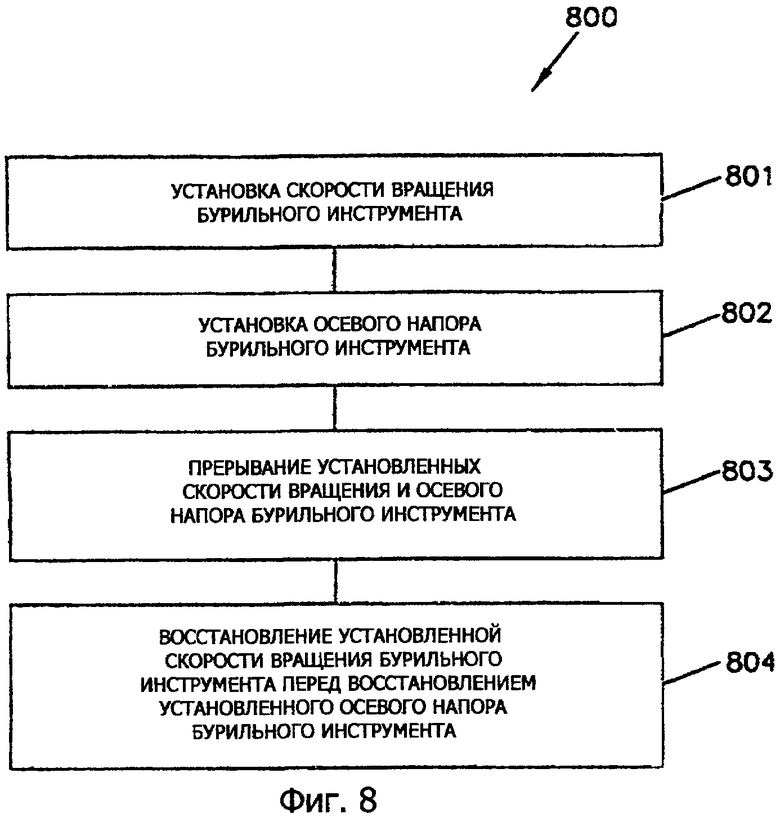
На фиг.8 показана блок-схема последовательности операций способа возобновления автоматического управления функциями бурения.
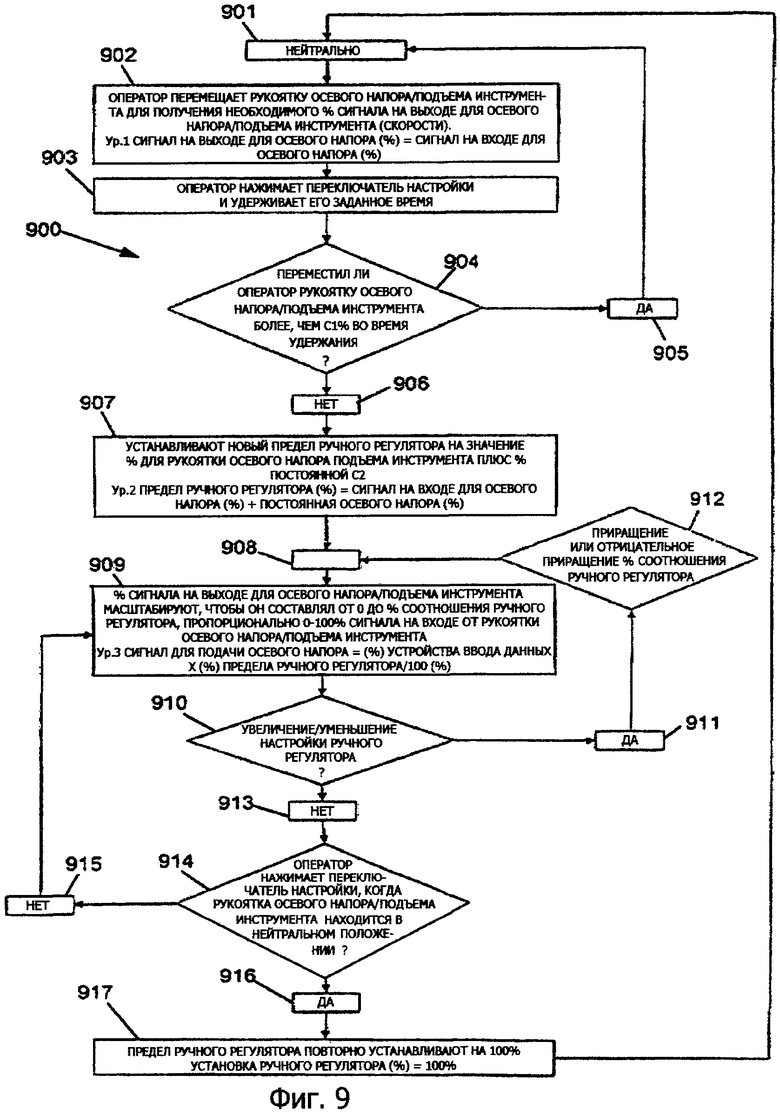
На фиг.9 показаны блок-схемы последовательности операций, которые можно использовать для реализации изменения масштаба управления вводом данных и уровня регулятора выходного насоса; и
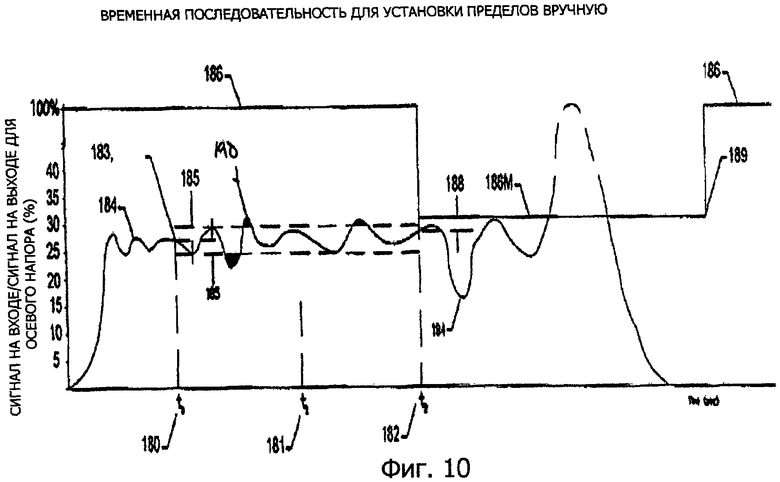
На фиг.10 показана временная последовательность для настройки предела ручного управления.
Подробное описание предпочтительного
варианта осуществления
Рассмотрение и иллюстрации, приведенные в данном документе, представлены в формате примера, при этом выбранные варианты осуществления описаны и проиллюстрированы для представления различных аспектов настоящего изобретения. Системы, устройства или способы согласно настоящему изобретению могут включать в себя один или несколько признаков, структур, способов или их комбинаций, описанных в данном документе. Например, устройство или систему можно реализовать с включением в состав одного или нескольких предпочтительных признаков и/или процессов, описанных ниже. Устройство или систему, согласно настоящему изобретению, можно реализовать с включением в состав многочисленных признаков и/или аспектов, проиллюстрированных и/или рассмотренных в отдельных примерах и/или на иллюстрациях. Подразумевается, что такое устройство или система не должны обязательно включать в себя все признаки, описанные в данном документе, но могут быть реализованы с включением в себя выбранных признаков, предусматривающих полезные структуры, системы и/или выполняемые функции.
Настоящее изобретение, в общем, относится к установке подземного бурения, такой как установка горизонтально-наклонного бурения и, конкретнее, к способу и устройству управления инструментами подземного бурения с электрогидравлической системой управления. В одном варианте осуществления оператор может менять производительность насоса осевого напора относительно сигнала на входе для осевого напора, генерируемого устройством управления оператора. Производительность насоса осевого напора при этом масштабируют пропорционально сигналу на входе, с одновременным ограничением значения производительности осевого напора заданной максимальной производительностью. Это обеспечивает полномасштабное перемещение устройства управления вводом данных для выравнивания отличающихся производительностей насоса осевого напора. Соответственно, оператор может адаптировать производительность к приемлемым условиям и/или минимизировать воздействие какой-либо мертвой зоны, присущей системе управления и гидравлической системе, наряду с другими преимуществами. В предпочтительном варианте осуществления, оператор установки подземного бурения может уменьшать сигнал на выходе для осевого напора относительно сигнала на входе для осевого напора, повторно устанавливать максимальный имеющийся уровень производительности осевого напора на присутствующий сигнал на входе для осевого напора и изменять масштаб сигнала на выходе для осевого напора, пропорционально сигналу на входе для осевого напора, при этом, одновременно, продвигая бурильную колонну со скоростью, соответствующей бурению в присутствующих грунтовых условиях. Дополнительно, предпочтительно сигнал на выходе для уменьшенного давления осевого напора можно корректировать вверх или вниз для управления скоростью бурения и также повторно устанавливать на любые предшествующие «установленные» условия или отменять.
Изобретение является особенно полезным для изменения сигнала на выходе для осевого напора относительно сигнала на входе для осевого напора, когда установку используют в условиях бурения, в которых требуется управляемость скорости осевого напора установки и/или очень низкие сигналы на выходе. Как отмечено выше, во многих электрогидравлических системах управления имеются присущие им мертвые зоны. Такие зоны ограничивают возможности оператора по перемещению бурильной колонны с управлением на малой скорости.
Вместе с тем, посредством увеличения входного сигнала низкого уровня к большему, почти полномасштабному перемещению (при изменении сигнала на выходе до приемлемой максимальной величины) влияние на работу в мертвой зоне уменьшается.
В различных вариантах осуществления изобретения соотношение управления вводом данных и производительности насоса может динамически меняться так, чтобы диапазон производительности насоса был уменьшен и перемасштабирован относительно диапазона входного сигнала органа управления пользователя, когда насос вращает или продвигает бурильную колонну без остановки или замедления вращения или продвижения бурильной колонны.
Различные варианты осуществления касаются системы горизонтально-наклонного бурения, имеющей динамически изменяемое управление. Такие варианты осуществления могут включать в себя бурильную трубу, выполненную с возможностью скрепления с бурильным инструментом, орган управления пользователя, имеющий устройство ввода данных, перемещаемое в нужное положение в диапазоне входного сигнала, орган управления пользователя, выполненный с возможностью подачи сигнала управления, пропорционального положению устройства ввода данных в диапазоне входного сигнала, насос, имеющий диапазон производительности и выполненный с возможностью перемещения бурильной трубы при различных уровнях производительности в диапазоне производительности на основании сигнала органа управления, и контроллер, соединенный с органом управления пользователя и насосом, контроллер, выполненный с возможностью исполнения программных команд, сохраняющихся в запоминающем устройстве, обуславливающих выполнение операций бурения системой горизонтально-наклонного бурения при первой настройке управления, в которой диапазон производительности насоса соответствует диапазону входного сигнала органа управления пользователя, и изменения в производительности насоса являются пропорциональными изменениям положения устройства ввода данных в диапазоне входного сигнала, и выполнение операций бурения во второй настройке управления, в которой диапазон производительности насоса ограничен пределом производительности, и изменения в производительности насоса являются пропорциональными изменениям устройства ввода данных в диапазоне входного сигнала. В таких вариантах осуществления, предел производительности во второй настройке управления может быть основан на уровне сигнала органа управления, соответствующего уровню производительности насоса в первой настройке управления, когда тумблер переключили. Уровень сигнала управления можно поддерживать в течение некоторого периода времени после переключения тумблера для установки предела производительности на данном уровне. Предел производительности может дополнительно быть основан на постоянной величине производительности, которую в нескольких вариантах осуществления добавляют к уровню производительности, когда переключают тумблер.
В нескольких вариантах осуществления, система горизонтально-наклонного бурения может осуществлять динамический переход работы системы горизонтально-наклонного бурения из второй настройки управления назад в первую настройку управления без прерывания перемещения бурильной трубы, связанного с уменьшением производительности насоса, когда устройство ввода данных установлено в нейтральное положение в диапазоне входного сигнала во второй настройке управления, и когда тумблер переключен.
В нескольких вариантах осуществления, система горизонтально-наклонного бурения может калибровать полный диапазон производительности насоса по полному диапазону входного сигнала органа управления пользователя в первой настройке управления. В нескольких вариантах осуществления диапазон производительности насоса, ограниченный пределом производительности во второй настройке управления, может пропорционально соответствовать полному диапазону входного сигнала органа управления пользователя.
Несколько вариантов осуществления могут калибровать полный диапазон производительности насоса по полному диапазону входного сигнала органа управления пользователя при первой настройке управления, при этом диапазон производительности насоса, ограниченный пределом производительности при второй настройке управления, пропорционально соответствует полному диапазону входного сигнала органа управления пользователя.
Несколько вариантов осуществления могут изменять масштаб диапазона производительности насоса, ограниченный пределом производительности, к полному диапазону входного сигнала органа управления пользователя, когда устройство ввода данных установлено в нейтральное положение диапазона ввода данных во второй настройке управления.
Несколько вариантов осуществления могут изменять предел производительности в ответ на ввод пользователя, и затем изменять диапазон производительности насоса, ограниченный скорректированным пределом производительности, до полного диапазона входного сигнала органа управления пользователя при второй настройке управления.
В нескольких вариантах осуществления, насос выполнен с возможностью вращения бурильной трубы при различных уровнях производительности в диапазоне производительности на основании сигнала управления, и предел производительности соответствует пределу скорости вращения и/или пределу давления насоса рабочей жидкости гидросистемы. В других вариантах осуществления, насос выполнен с возможностью линейного продвижения бурильной трубы на различных уровнях производительности в диапазоне производительности на основании сигнала управления, и предел производительности соответствует пределу скорости продвижения и/или пределу давления насоса рабочей жидкости гидросистемы.
В нескольких из вышеупомянутых вариантов осуществления, а также других вариантах, рассмотренных в данном документе, программные команды, сохраняющиеся в запоминающем устройстве, обуславливающие выполнение операций бурения системой горизонтально-наклонного бурения, могут быть исполнены процессором для выполнения установленных технологических процессов.
Подробное описание теории операций и предпочтительных вариантов реализации должно быть отложено для выполнения краткого обзора установки горизонтально-наклонного бурения и системы управления.
Установка горизонтально-наклонного бурения
Установка 20 горизонтально-наклонного бурения, показанная на фиг.1, включает в себя раму 22, на которой смонтирован вращательный приводной механизм 30, перемещающийся со скольжением вдоль продольной осевой линии рамы 22. В одном варианте осуществления установка горизонтально-наклонного бурения включает в себя задний упор 26 и передний упор 27 для позиционирования и стабилизации установки на буровой площадке, шасси 24 для несения установки во время транспортировки между площадками работ. Бурильная колонна 18 содержит бурильный инструмент 42, разработанный для вхождения в контакт с грунтом, и одну или несколько бурильных штанг 38, передающих усилия с установки на бурильный инструмент 42. Вращательный приводной механизм 30 обычно включает в себя редуктор и шпиндель бурового станка, вращающий бурильную колонну 18 вокруг ее продольной осевой линии, предпочтительно энергию вращения дает гидравлический двигатель 216. Установка 20 горизонтально-наклонного бурения также включает в себя приводной механизм 28 осевого напора, обычно включающий в себя шестерни или звездочки цепного привода для перемещения приводного механизма 28 вверх и вниз по раме 22 для продвижения бурильной колонны 18 в грунт или вытаскивания из него. Энергию осевого напора предпочтительно дает гидравлический двигатель 217. В некоторых вариантах осуществления, двигатель 36 приводит в действие гидравлические насосы 16 и 17, создающие давление рабочей жидкости, подаваемой на гидравлические двигатели 216 и 217.
Гидравлические системы могут либо иметь незамкнутый контур, где рабочая жидкость перемещается из гидравлической емкости 14 через насосы к двигателям 216, 217 и обратно в емкость 14, или они могут быть гидростатическими, где рабочая жидкость находится, по существу, в замкнутом контуре, перемещаясь между насосом и двигателем. В каждой из систем работа насосов 16, 17 и двигателей 216, 217 согласована так, что при управлении расходом рабочей жидкости гидросистемы регулируется скорость вращения выходных валов двигателей, и скорость можно выводить из расхода. Насосы являются обычно насосами переменного рабочего объема, способными осуществлять производительность с изменяемым расходом. Изменяемую производительность можно линейно регулировать электрическим током, подаваемым системой управления. Скорость вращения насосов пропорциональна расходам производительности. Когда скорость можно регулировать, можно осуществлять мониторинг давления рабочей жидкости гидросистемы для выведения из него крутящего момента, вырабатываемого двигателем, который прямо пропорционален генерируемым продольному усилию или крутящему моменту. Другие варианты осуществления являются возможными, например, в которых приводные механизмы вращения и осевого напора могут иметь отличающиеся гидравлические приводы (например, такие, как гидравлические цилиндры).
Некоторые варианты осуществления могут также включать в себя устройство циркуляции воды, подающее воду через бурильную колонну 18 в окрестность бурильного инструмента 42, где поток воды захватывает выбуренные частицы грунта и удаляет их из скважины. Установка горизонтально-наклонного бурения может также включать в себя приспособление для смазки различных движущихся компонентов (не показано).
На фиг.2 показан вариант станции 100 управления оператора для установки 20 горизонтально-наклонного бурения. Станция 100 управления оператора включает в себя орган 110 управления вращением и орган 130 управления осевым напором, обеспечивающие ввод данных в контроллер 150. Возможно применение многих вариантов осуществления органов 110 и 130 управления. Например, в одном приемлемом варианте осуществления, каждый из органов 110 и 130 управления содержит рукоятку управления. В таком варианте осуществления, каждая из рукояток 110, 130 управления вырабатывает электрический сигнал, пропорциональный положению рукоятки управления относительно центрального положения. Электрический сигнал передается, как входные данные на контроллер 150.
В одном варианте осуществления, когда рукоятку управления 110, 130 перемещают от центрального положения, вырабатываемый электрический сигнал соответствует увеличенному крутящему моменту (и/или скорости вращения) или усилию осевого напора (и/или скорости осевого перемещения), соответственно. Когда рукоятку 110, 130 управления перемещают ближе к центральному положению, вырабатываемый электрический сигнал соответствует уменьшенному крутящему моменту (и/или скорости вращения) или усилию осевого напора (и/или скорости осевого перемещения), соответственно. В одном варианте осуществления, когда рукоятку 110 управления перемещают в направлении вперед, от оператора, вырабатываемый электрический сигнал соответствует вращению бурильной колонны против часовой стрелки, если смотреть на конец бурильной колонны. Альтернативно, когда рукоятку 110 управления перемещают в направлении назад, к оператору, вырабатываемый электрический сигнал соответствует противоположному направлению, вращению по часовой стрелке. Аналогично, в некоторых вариантах осуществления, когда рукоятку 130 управления перемещают вперед, от оператора, вырабатываемый электрический сигнал соответствует перемещению бурильной колонны в грунт. Альтернативно, когда рукоятку 130 управления перемещают в направлении назад, к оператору, вырабатываемый электрический сигнал соответствует перемещению бурильной колонны назад к установке.
Когда любая из рукояток 110, 130 управления находится в центральном положении, вырабатываемый электрический сигнал может соответствовать условию нейтрального положения, в котором вращение или напорное перемещение, соответственно, установлены на ноль. Пружинное или другое отклоняющее устройство может быть оборудовано для возврата каждой из рукояток управления в центральное положение, чтобы, если оператор не держит рукоятку, она возвращалась в центральное, нейтральное положение, чтобы настройки вращения или напорного перемещения устанавливались на ноль.
Контроллер 150 вырабатывает выходные данные, реагируя на различные входные данные, для управления гидравлической системой. Система включает в себя гидравлические насосы 16 и 17 буровой установки 20. Гидравлические двигатели 216, 217 приводятся в действие рабочей жидкостью гидросистемы для создания вращения и напорного перемещения бурильного инструмента 42 и бурильной колонны 18. Как отмечено выше, данное управление обычно осуществляется изменяемым электрическим током, при этом некоторый электрический ток должен обуславливать создание насосом некоторого расхода в гидравлической системе. При этом ведущий вал двигателя вращается с некоторой скоростью вращения. Это обычно не зависит от давления в текучей среде. Системы управления обычно разработаны с возможностью управления скоростью вращения независимо от нагрузки. Системы управления обычно дополнительно включают в себя датчики 226 и 227 давления, обеспечивающие обратную связь в системе управления, указывая давление в линиях, и могут дополнительно включать в себя датчики 236 и 237 скорости для измерения частоты вращения на выходном валу двигателей.
Электронные схемы, представленные на фиг.2, можно использовать для выполнения различного технического оснащения и методик, рассмотренных в данном документе. Электронные схемы могут включать в себя запоминающее устройство, содержащее машиночитаемый носитель с установленной компьютерной программой, программное обеспечение, микропрограммное обеспечение, исполняемые компьютером команды, команды, которые может исполнять компьютер и т.п., подлежащие исполнению электронными схемами, такими, как управляющий процессор 150. Например, запоминающее устройство может представлять собой машиночитаемый носитель, сохраняющий компьютерную программу, с исполнением компьютерной программы управляющим процессором 150, обуславливающим перемещение бурильной колонны с использованием насоса, работающего на уровне производительности диапазона производительности, уровне производительности, соответствующем положению органа управления вводом данных в диапазоне входного сигнала при первой настройке управления, изменение уровня производительности насоса при первой настройке управления, при этом изменения в уровне на производительности насоса при первой настройке управления являются пропорциональными изменениям положения органа управления вводом данных в диапазоне входного сигнала, переход от первой настройки управления ко второй настройке управления с поддержанием, по меньшей мере, некоторого перемещения бурильной колонны, определение предела производительности диапазона производительности насоса, перемещение бурильной колонны с использованием насоса при второй настройке управления, при этом диапазон производительности насоса ограничен пределом производительности при второй настройке управления, и изменение уровня производительности насоса при второй настройке управления, при этом изменения уровня производительности насоса в диапазоне производительности при второй настройке управления являются пропорциональными изменениям положения органа управления вводом данных в диапазоне входного сигнала. Аналогичным образом, другие способы и методики, рассмотренные в данном документе, можно выполнять с использованием электронных схем, представленных на фиг.2.
Различные варианты осуществления могут дополнительно включать в себя идентификацию необходимого изменения в производительности насоса при работе в первой настройке управления, обнаружение того, что необходимое изменение в производительности насоса слишком мало для осуществления изменением положения органа управления вводом данных в диапазоне входного сигнала при первой настройке управления, переход от первой настройки управления ко второй настройке управления для увеличения чувствительности между органом управления ввода данных и производительностью насоса и выполнение необходимых изменений в производительности насоса с использованием второй настройки управления. В нескольких вариантах осуществления, предел производительности при второй настройке управления основан на уровне производительности насоса, соответствующем положению органа управления вводом данных в диапазоне входного сигнала, когда тумблер переключен в первую настройку управления. В нескольких вариантах осуществления предел производительности при второй настройке управления основан на уровне производительности насоса, соответствующем положению органа управления вводом данных в диапазоне входного сигнала, который поддерживался в течение некоторого периода времени после переключения тумблера в первой настройке управления. Предел производительности может также быть основан на постоянном количестве производительности.
Различные варианты осуществления могут включать в себя калибрование полного диапазона производительности насоса по полному диапазону входного сигнала органа управления при первой настройке управления, при этом диапазон производительности насоса, ограниченный пределом производительности при второй настройке управления, пропорционально соответствует полному диапазону входного сигнала органа управления пользователя.
Различные варианты осуществления могут включать в себя пропорциональное изменение диапазона производительности насоса, ограниченного пределом производительности, по полному диапазону входного сигнала органа управления пользователя, когда орган управления ввода данных установлен в нейтральное положение диапазона входного сигнала при второй настройке управления.
Различные варианты осуществления могут включать в себя изменение предела производительности в ответ на ввод данных пользователя и, затем, изменение диапазона производительности насоса, ограниченного скорректированным пределом производительности, по полному диапазону входного сигнала органа управления вводом данных при второй настройке управления.
В нескольких вариантах осуществления перемещение бурильной колонны с использованием насоса в первой и второй настройках управления дополнительно содержит вращение бурильной колонны с использованием гидравлического насоса вращения, соответствующего насосу, в котором изменение уровня производительности насоса в первой и второй настройках управления дополнительно содержит изменение скорости вращения и/или давления рабочей жидкости гидросистемы гидравлического насоса вращения, и в котором предел производительности представляет собой максимальную скорость вращения и/или максимальное давление рабочей жидкости гидросистемы гидравлического насоса вращения.
В нескольких вариантах осуществления, перемещение бурильной колонны с использованием насоса в первой и второй настройках управления дополнительно содержит линейное продвижение бурильной колонны с использованием гидравлического насоса осевого напора, соответствующего насосу, в котором изменение уровня производительности насоса при первой и второй настройках управления дополнительно содержит изменение скорости продвижения и/или давления рабочей жидкости гидросистемы гидравлического насоса осевого напора, и в котором предел производительности представляет собой максимальную скорость продвижения и/или максимальное давление рабочей жидкости гидросистемы гидравлического насоса осевого напора.
На фиг.3 показана более подробно рукоятка 110 управления вращением с различными управляющими переключателями, установленными на рукоятке.
На фиг.4 показана табличка, указывающая функции каждого из данных переключателей оператору. Рукоятка 110 управления включает в себя переключатели 112, 118, 120 и 122, каждый из которых вырабатывает электрический сигнал при включении, производимом нажатием. Управляющий переключатель 112 можно назвать переключателем настройки. Когда переключатель 112 настройки включают, электрический сигнал отправляется на контроллер 150, запуская бурение в автоматическом режиме (также называемый режимом автоматического бурения). Когда контроллер 150 принимает сигнал от переключателя 112 настройки (или другого источника), в контроллере устанавливаются параметры вращения и/или напорного перемещения на значения, установленные положениями рукояток 110, 130 управления, на момент включения переключателя 112 настройки. Предпочтительный метод включает в себя установку значения скорости вращения при установке значения давления в линии осевого напора, что описано более подробно ниже. После этого контроллер 150 автоматически поддерживает параметры бурения по вращению и напорному перемещению на установленных значениях без дополнительного ввода данных оператором. Оператор затем может отпустить рукоятки 110, 130 управления, что не влияет на выполнение операций бурения, тем самым уменьшается утомляемость оператора. Должно быть ясно, что режим автоматического бурения также можно выключить посредством включения переключателя 112 настройки, когда система является включенной в работу.
В одном варианте осуществления, рукоятка 110 управления вращением также включает в себя управляющие переключатели 114 и 116, управляющие функцией расхода воды для нагнетания воды в пробуренную скважину для удаления выбуренной породы из скважины. Рукоятка 110 управления вращением также включает в себя управляющие переключатели 118 и 120 для управления скоростью вращения двигателя 36, и управляющий переключатель 122 для управления смазывающим приспособлением (не показано).
На фиг.6 показан дисплей 170 системы управления, включающий в себя световой индикатор 172, включающийся при работе в режиме автоматического бурения. Данный световой индикатор 172 включается после включения переключателя 112 настройки и определения настроек вращения и осевого напора, чтобы войти в режим автоматического бурения. Световой индикатор 172 отключается, если режим автоматического бурения не включен.
На фиг.5 показаны дополнительные управляющие переключатели на правой стороне станции 100 управления оператора. В одном варианте осуществления, станция 100 управления включает в себя переключатели 140, 142, имеющие электрическую связь с контроллером 150. Переключатель 140 имеет нейтральное положение, первое рабочее положение и второе рабочее положение. В одном варианте осуществления, переключатель 140 подпружинен в нейтральном положении, так что, когда переключатель устанавливают в первое или второе рабочие положения и затем отпускают, переключатель 140 должен возвращаться в нейтральное положение. Когда переключатель 140 находится в нейтральном положении, переключатель 140 не имеет воздействия на бурильную операцию. Когда переключатель 140 поставлен в первое рабочее положение, такое, в которое переключатель 140 поворачивают по часовой стрелке из нейтрального положения, и когда включен режим автоматического бурения, в контроллер 150 отправляется электрический сигнал для увеличения значения настройки скорости вращения на заданное приращение. Аналогично, когда переключатель 140 поставлен во второе рабочее положение, такое, в которое переключатель 140 поворачивают против часовой стрелки из нейтрального положения, и когда включен режим автоматического бурения, в контроллер 150 отправляется электрический сигнал для уменьшения значения настройки вращения на заданное отрицательное приращение.
Переключатель 142 работает аналогично. Переключатель 142 имеет нейтральное положение, первое рабочее положение и второе рабочее положение. В одном варианте осуществления, переключатель 142 подпружинен в нейтральном положении, так что, когда переключатель устанавливают в первое или второе рабочие положения и затем отпускают, переключатель 142 должен возвращаться в нейтральное положение. Когда переключатель 142 поставлен в нейтральное положение, переключатель 142 не имеет воздействия на бурильную операцию. Когда переключатель 142 поставлен в первое рабочее положение, такое, в которое переключатель 142 поворачивают по часовой стрелке из нейтрального положения, и когда включен режим автоматического бурения, в контроллер 150 отправляется электрический сигнал для увеличения значения настройки давления осевого напора на заданное приращение. Аналогично, когда переключатель 142 поставлен во второе рабочее положение, в которое переключатель 142 поворачивают против часовой стрелки из нейтрального положения, и когда включен режим автоматического бурения, в контроллер 150 отправляется электрический сигнал для уменьшения значения настройки давления осевого напора на заданное отрицательное приращение.
Во время процессов бурения или проработки ствола снизу вверх система действует, поддерживая вращение бурильной колонны на выбранной скорости вращения, вне зависимости от настройки давления вращения и настройки давления осевого напора и должна автоматически изменять скорость осевого напорного перемещения, насколько необходимо, стремясь поддерживать выбранное давление в линии вращения или поддерживать установленную величину усилия на бурильном инструменте. В плотных породах, в результате поддержания постоянного усилия на буровом долоте, должен получаться постоянный/согласованный крутящий момент на буровом долоте, и должна быть максимизирована эффективность бурения. В изменяющихся породах, данная методика управления также является эффективной.
Может возникнуть необходимость прерывания режима автоматического бурения, когда требуется нарастить или удалить бурильную штангу в бурильной колонне. Существует несколько способов прерывания режима автоматического бурения. Установку можно выполнить так, чтобы, когда включают режим автоматического бурения, как указывает световой индикатор 172, любое дополнительное перемещение рукояток 110, 130 управления отправляло электрический сигнал на контроллер 150, обуславливающий прерывание контроллером 150 режима автоматического бурения. Альтернативно, установку можно выполнить так, чтобы при включении режима автоматического бурения, включающий переключатель 112 отправлял электрический сигнал на контроллер 150, обуславливающий прерывание контроллером 150 режима автоматического бурения. Альтернативно, можно оборудовать или приспособить другие переключатели или рукоятки управления для отправки электрического сигнала на контроллер 150 для прерывания режима автоматического бурения. Одним примером является функция управления, относящаяся к раскреплению соединения между зажимным патроном шпинделя буровой установки или приводом вращения и бурильной колонной. Когда бурильная штанга спущена и привод вращения находится на конце рамы 22, привод вращения должен быть отвинчен от бурильной колонны и перемещен назад на противоположный конец рамы, чтобы можно было нарастить другую бурильную штангу. Данное действие необходимо, когда привод вращения расположен в некоторых положениях вдоль рамы, например, на крайних противоположных концах. Таким образом, сигнал прерывания может подаваться автоматически, датчиком, измеряющим положение привода вращения. Когда сигнал прерывания принимается, он может также автоматически отменять другие функции, такие как подача воды.
Станция 100 управления оператора также включает в себя переключатель 144, имеющий электрическую связь с контроллером 150. Переключатель 144 можно также назвать переключателем возврата. Когда режим автоматического бурения прерван, оператор может включить переключатель 144 для возврата в режим автоматического бурения. Переключатель 144 затем отправляет электрический сигнал на контроллер 150, обуславливающий возврат режима автоматического бурения контроллером 150 с настройками, аналогичными существовавшим до прерывания режима автоматического бурения.
Применимыми являются многие варианты осуществления процесса возврата. Процесс возврата в настоящем изобретении инициирует работу бурения способом, минимизирующим ненужную вибрацию и напряжение в бурильной колонне и бурильном инструменте. Фиг.7 и 8 иллюстрируют один применимый вариант осуществления процесса возврата. Процесс возврата начинается (во время, равное 0 секунд), когда переключатель 144 вдавливают для инициирования процесса возврата отправлением электрического сигнала на контроллер 150. Контроллер 150 должен включить в работу приводной механизм вращения для приведения бурильного инструмента во вращение с установленной скоростью вращения. Одновременно автоматически повторно начинается подача воды (не показанная на чертежах). Возобновление вращения происходит достаточно быстро, обычно за одну секунду. В течение периода времени возобновления вращения контроллер 150 не включает в работу приводной механизм осевого напора. Таким способом бурильный инструмент должен возобновить вращение до установленной скорости вращения, пока нагрузка осевого напора или напорное перемещение отсутствуют или являются незначительными. Данная работа является предпочтительной, поскольку производит плавное ускорение вращения без ударной нагрузки на бурильный инструмент и бурильную колонну. Существуют дополнительные выгоды при восстановлении циркуляции воды к режущему инструменту до выработки новой выбуренной породы при осевом перемещении бурильной колонны.
После достижения установленной скорости вращения, приблизительно через одну секунду после начала вращения, контроллер 150 начинает прикладывать усилие осевого напора к бурильной колонне. Вместе с тем, вместо быстрого увеличения усилия осевого напора до установленного значения, усилие осевого напора увеличивается от нуля до установленного значения осевого напора, с заданной скоростью. В одном применимом варианте осуществления, усилие осевого напора увеличивается с постоянной скоростью в 25% установленного усилия осевого напора в течение трех секунд, от времени в одну секунду после инициирования процесса восстановления до времени в четыре секунды после инициирования процесса восстановления. Таким образом, со скоростью увеличения усилия осевого напора в 25% установленного усилия осевого напора в течение трех секунд, величина усилия осевого напора, приложенного в данной точке, составит 75% от установленного усилия осевого напора. Усилие осевого напора увеличивается со второй постоянной скоростью 12,5% в секунду в течение двух секунд. В данном примере восстановления, от момента времени через четыре секунды после инициирования процесса восстановления до момента времени через шесть секунд после инициирования процесса восстановления, усилие осевого напора увеличивается от 75% установленного значения до 100% установленного значения. Таким образом, через шесть секунд после инициирования процесса восстановления бурильный инструмент должен работать как с установленной частотой вращения, так и с установленным осевым напором.
Альтернативный вариант осуществления включает в себя увеличение усилия осевого напора с одной заданной скоростью, такой как 25% установленного усилия осевого напора в секунду в течение четырех секунд. Должно быть ясно, что другие скорости изменения также можно использовать, и что скорости изменения, представленные в данном документе, относятся к предпочтительным вариантам осуществления, без ограничения ими.
Аспекты горизонтально-наклонного бурения дополнительно раскрыты в патентах США № 6,766,253, 6,367,564, 6,389,360, 5,556,253, 6,554,082 и патентной заявке США № 60/927,746, зарегистрированной 3 мая 2007 г., полностью включенными в данный документ в виде ссылки.
Теория работы регулятора
Некоторые электронные системы управления принимают сигналы на входе как напряжение, пропорциональное смещению устройства ввода данных. Контроллер преобразует напряжение в процентное соотношение. Например, устройство ввода данных, такое как джойстик (лучше всего показано на фиг.2, как рукоятка 130), можно калибровать так, что, когда он установлен в положение полностью вперед в направлении осевого напора, контроллер 150 должен преобразовывать сигнал на входе (напряжение) в значение процентного соотношения 100%. Аналогично, если устройство ввода данных откалибровано так, то когда орган управления установлен до упора в направлении назад, контроллер 150 должен преобразовать сигнал на входе (напряжение) в значение -100%. Любое промежуточное положение органа управления вводом данных должно преобразоваться в дольное процентное соотношение.
Обычно сигнал максимальной производительности насоса осевого напора установлен на 100%. Поэтому, если сигнал на входе 100%, тогда соответствующий сигнал на выходе также должен быть 100%. Результатом любого промежуточного значения процентного соотношения сигнала на входе должно быть эквивалентное значение процентного соотношения для сигнала на выходе для производительности насоса осевого напора. Сигнал на выходе для производительности насоса осевого напора предпочтительно сохраняет процентное соотношение один к одному (то есть пропорциональное) в отношении значения сигнала на входе, как представлено Уравнением 1.
Сигнал на выходе для осевого напора (%) = Сигнал на выходе для осевого напора (%) Ур.1
Как отмечено выше, настоящим изобретением создан способ изменения соотношения между сигналами на выходе и входе. Измененным пределом сигнала на выходе можно считать определенную вручную настройку регулятора по сигналу на выходе, когда такая ручная настройка регулятора обеспечивает изменение максимально допустимого предела для сигнала на выходе к величине, отличной от 100%.
В предпочтительном варианте осуществления, можно использовать переключатель 112 настройки, описанный выше применительно к установке 20 горизонтально-наклонного бурения. В дополнение к переключателю 112 настройки, обеспечивающему выполнение функции автоматического бурения (описано выше), переключатель 112 настройки может также обеспечивать выполнение функции ручного регулятора. Должно быть ясно, вместе с тем, что другие переключатели, кнопки, клавиши и другие устройства, приводимые в действие оператором, можно использовать для обеспечения выполнения функции регулятора.
В предпочтительном варианте осуществления, когда нажат и удерживается переключатель 112 ручной настройки предела осевого напора, и, если сигнал на входе остается в диапазоне заданной погрешности на заданном отрезке времени, ручную настройку регулятора можно изменить к значению менее 100%. Новый предел ручного регулятора теперь эквивалентен значению для устройства ввода данных осевого напора плюс произвольная постоянная осевого напора, как показано в Уравнении 2.
Предел ручного регулятора (%) = Сигнал на входе для осевого напора (%) + Постоянная осевого напора (%) Ур. 2
Например, постоянную осевого напора можно произвольно установить на ноль. Если сигнал на входе составляет 50%, тогда переключатель 112 настройки отжимают и удерживают в течение заданного отрезка времени, при этом предел ручного регулятора должен быть уменьшен со 100% до 50%. Вне зависимости от положения, в которое установлена рукоятка управления вводом данных, производительность максимального осевого напора должна быть ограничена или «отрегулирована» на значение 50%. Установка постоянной осевого напора, большей нуля, незначительно увеличивает предел ручного регулятора.
Другой аспект изобретения состоит в том, что после того, как регулятор настроен, и если устройство ввода данных вернулось в нейтральное положение (например, 0%), масштаб сигнала на выходе для производительности насоса осевого напора изменяют пропорционально пределу ручного регулятора, как показано в Уравнении 3.
Сигнал для производительности осевого напора = (%) Устройства ввода данных X (%) Предела ручного регулятора/100(%) Ур.3
Поэтому, например, если постоянная осевого напора составляет 10%, сигнал устройства ввода данных первоначально составляет 30% во время настройки ручного регулятора, тогда после изменения масштаба, 20% сигнал устройства ввода данных даст фактический сигнал на выходе для производительности осевого напора, составляющий 8%, как рассчитано в Уравнении 4.
 Производительность осевого напора = 20% X (30% + 10%)/100% = 8% Ур.4
Производительность осевого напора = 20% X (30% + 10%)/100% = 8% Ур.4
В настоящем изобретении, когда ручной регулятор настроен, высокое разрешение сигнала на выходе для осевого напора имеется у оператора для работы в условиях, когда требуется малая скорость осевого напора, или точное давление осевого напора или вращения.
Вариант осуществления и действие
Предпочтительным оборудованием, в котором можно использовать настоящее изобретение, является электрогидравлическая система управления установки горизонтально-наклонного бурения, траншейного экскаватора или другой установки бурения грунта. В системе данного типа электронный контроллер принимает сигналы на входе от устройств ввода данных, таких как датчики давления и управляемые оператором джойстики. Контроллер использует устройство ввода данных для создания электронных сигналов для устройств подачи, таких как насосы или задвижки гидравлической системы для создания осевого напора и вращения.
В предпочтительном варианте осуществления рукоятку вращения 110 и рукоятку 130 осевого напора, сконструированные согласно принципам настоящего изобретения, используют для установки необходимых параметров бурения. Кнопку 112 настройки можно использовать для обеспечения настройки предела ручного регулятора. Более конкретно, кнопку 112 настройки отжимают и удерживают две секунды с поддержанием, по меньшей мере, одной из рукояток 110 и 130 в заданных границах погрешности. В одном варианте осуществления, заданные границы погрешности (приблизительно 5%) требуют, чтобы рукоятка 130 осевого напора удерживалась достаточно в постоянном положении в течение периода в две секунды. Если данные два условия соблюдены (то есть кнопка 112 настройки отжата на две секунды, и устройство ввода данных осевого напора не превысило заданные границы погрешности), после освобождения кнопки 112 настройки повторно устанавливают максимальную производительность насоса осевого напора (обычно 100%), эквивалентную значению сигнала на входе для осевого напора, плюс постоянная осевого напора. Данный сигнал на выходе для производительности насоса с максимальным осевым напором действует, как регулятор.
Если после настройки ручного регулятора, и если рукоятка не возвращается в нейтральное положение, тогда любое дополнительное увеличение сигнала на входе для осевого напора должно только обеспечивать увеличение сигнала для производительности насоса осевого напора, эквивалентного настройке регулятора. Когда рукоятку осевого напора возвращают к нейтральному положению, контроллер 150 изменяет масштаб сигнала на выходе для производительности осевого напора, чтобы он был эквивалентным: [(будущему мгновенному сигналу на входе для производительности осевого напора (%)) X (умноженному на вновь установленный предел ручного регулятора (%))]/100%.
С установкой ручного регулятора, результатом 100% сигнала на входе должен быть сигнал на выходе для максимальной производительности, эквивалентный настройке ручного регулятора. Все промежуточные сигналы на выходе для производительности осевого напора должны быть пропорциональны сигналу на входе для осевого напора. После того как ручной регулятор настроен, отдельное переключение приращения/отрицательного приращения можно использовать для увеличения/уменьшения настройки ручного регулятора. Для повторной установки ручного регулятора назад на 100%, обе рукоятки ввода данных возвращают в нейтральное положение и нажимают кнопку 112 настройки. Сигнал на выходе для осевого напора должен быть эквивалентным сигналу на входе, с действующим регулятором в 100%.
На фиг.9 показан один вариант осуществления логической блок-схемы последовательности операций, которую можно использовать для реализации принципов настоящего изобретения. Логическую блок-схему последовательности операций можно реализовать посредством контроллера 150, центрального процессора, другого бортового компьютера или специального программируемого интеллектуального устройства. Способ 900 начинается на стадии 901, где рукоятка 130 осевого напора/подъема инструмента находится в нейтральном положении. С перемещением на стадии 902, оператор может перемещать рукоятку 130 осевого напора/подъема инструмента для получения необходимого процента сигнала на выходе для осевого напора/подъема инструмента. В данном типе использования, сигнал на выходе для осевого напора является пропорциональным сигналу на входе для осевого напора. Данное использование может соответствовать нормальному или по умолчанию использованию оборудования.
При перемещении на стадии 903, если оператор нажимает переключатель 112 настройки и удерживает в течение заданного периода времени, процесс переходит на стадию 904, где определяют, переместил ли оператор рукоятку 130 осевого напора/подъема инструмента более, чем на заданную величину во время удержания. Если ответ "да" на стадии 905, тогда процесс возвращается на стадию 901. Вместе с тем, если перемещения на величину больше заданной не было, процесс перемещается на стадию 906. На стадии 907 устанавливают новый предел ручного регулятора на значение процента ввода данных для рукоятки осевого напора/подъема инструмента, плюс значение процента второй постоянной. Это соответствует уравнению 2, приведенному выше. На стадиях 908 и 909 процент сигнала на выходе для осевого напора/подъема инструмента изменяют, чтобы он составлял от 0 до процентного соотношения ручного регулятора. Это величина, установленная на стадии 907. Процентное соотношение также является пропорциональным вводу данных рукоятки осевого напора/подъема инструмента от 0 до 100%. Это соответствует уравнению 3, приведенному выше.
На стадии 910, в варианте осуществления настоящего изобретения также предусмотрено, при необходимости, создание возможности увеличения/уменьшения настройки ручного регулятора посредством выбора переключателей, кнопок или других устройств для увеличения или уменьшения по выбору оператора. Если на это имеется запрос на стадии 911, тогда процесс продолжается на стадии 912, где выполняют надлежащее приращение или отрицательное приращение процентного соотношения ручного регулятора. Если запрос на увеличение или уменьшение настройки ручного регулятора отсутствует, тогда процесс продолжается на стадии 913. После стадии 914, если оператор вновь нажимает переключатель настройки, когда рукоятка осевого напора/подъема инструмента находится в нейтральном положении, процесс продолжается на стадиях 916 и 917, где предел ручного регулятора повторно устанавливают на 100% на сигнале выхода, и процесс возвращается на стадию 901 в его нейтральное условие. Вместе с тем, если оператор не нажимает переключатель настройки на стадии 914, тогда процесс продолжается на стадии 915 и возвращается на стадию 909.
На фиг.10 показана временная последовательность для ручной настройки пределов. Подача осевого напора (указана позицией 184) начинается с нуля, и оператор устанавливает относительно установившийся режим ко времени t0 (должно быть ясно, что разумные операторы, в общем, не могут поддерживать совершенный установившийся режим, по условиям бурения, воздействующим на установку 20 горизонтально-наклонного бурения и другим факторам). В точке 183 (соответствующей t0, указанному позицией 180), отжимают кнопку 112 настройки, запуская двухсекундный период времени. Точка 183 устанавливает уровень, над которым процессор 150 определяет, перемещен ли джойстик 130 на величину больше некоторой максимальной. Здесь максимальная величина обозначена позицией 185. В нескольких вариантах осуществления можно допустить некоторое заданное количество времени, превышающее максимальное количество. Данная область отмечена закрашиванием, одна такая область указана позицией 190. t1, указанное позицией 181, и t2, указанное позицией 182, соответствуют одной и двум секундам, соответственно. По окончании двух секунд, максимальный сигнал на выходе для осевого напора меняется от 100%, указанных позицией 186, на новый максимальный уровень, указанный позицией 186M. Производительность осевого напора на выходе продолжается, но является ограниченной новой максимальной настройкой (показано пунктирной линией). В точке 189 предел возвращается к первоначальному максимальному.
Приведенное выше описание относится к системам и компонентам, обычно находящимся в системе управления, а также к скорости осевого напора, давлению осевого напора и сигналам на входе для осевого напора. Кроме того, аналогичным образом можно осуществлять мониторинг и управление давлением вращения, скоростью вращения, сигналами обратной связи параметров вращения, сигналами обратной связи параметров осевого напора.
Наряду с другими вещами, приведенное выше рассмотрение с прилагаемыми чертежами раскрывает систему горизонтально-наклонного бурения с динамически изменяемым управлением, содержащую средство перемещения бурильной колонны, использующее насос, работающий на уровне производительности диапазона производительности, соответствующем положению органа управления вводом данных в диапазоне ввода данных первой настройки управления, средство для изменения уровня производительности насоса при первой настройке управления, при этом изменения уровня производительности насоса при первой настройке управления являются пропорциональными изменениям положения органа управления вводом данных в диапазоне входного сигнала, средство для перехода от первой настройки управления ко второй настройке управления с поддержанием, по меньшей мере, некоторого перемещения бурильной колонны, средство определения предела производительности в диапазоне производительности насоса, средство перемещения бурильной колонны, использующее насос при второй настройке управления, причем диапазона производительности насоса, ограниченного пределом на выходе при второй настройке управления, и средства для изменения уровня производительности насоса при второй настройке управления, при этом изменения в уровне производительности насоса в диапазоне на выходе при второй настройке управления пропорциональны изменениям положения органов управления вводом данных в диапазоне входного сигнала.
Хотя конкретные варианты осуществления изобретения описаны для их практического применения, специалистам в данной области техники должно быть ясно, что изобретение не ограничено таким практическим применением или вариантом осуществления или конкретными компонентами, раскрытыми и описанными в данном документе. Специалистам в данной области техники должно быть ясно, что другие компоненты, осуществляющие принципы данного изобретения, и другие его практические применения, отличающиеся от описанных в данном документе, можно выполнять согласно сущности и назначению данного изобретения. Устройство, описанное в данном документе, дано только как один пример варианта осуществления, включающий в себя и применяющий принципы данного изобретения.


Изобретение относится, в общем, к системам подземного бурения и способам управления подземным бурением. Техническим результатом является регулирование органов управления для оптимизирования рабочего диапазона органов управления, обеспечение функции управления с низким значением на выходе, пропорциональной полномасштабному управлению вводом данных. Система включает бурильную трубу, выполненную с возможностью соединения с бурильным инструментом, орган управления пользователя, имеющий устройство ввода данных, перемещаемое в положение в диапазоне входного сигнала, и выполненный с возможностью подачи сигнала управления, пропорционального положению устройства ввода данных в диапазоне входного сигнала, насос, имеющий диапазон производительности, выполненный с возможностью перемещения бурильной трубы на различных уровнях производительности в диапазоне производительности на основании сигнала управления, и контроллер, соединенный с органом управления пользователя и насосом и выполненный с возможностью исполнения команд программы, сохраняемой в запоминающем устройстве, обеспечивающих выполнение операций бурения при первой настройке управления, в которой диапазон производительности насоса соответствует диапазону ввода данных органа управления пользователя, и изменения производительности насоса являются пропорциональными изменениям положения устройства ввода данных в диапазоне входного сигнала, и выполнение операций бурения при второй настройке управления, в которой диапазон производительности насоса ограничен пределом производительности, и изменения производительности насоса являются пропорциональными изменениям положения устройства ввода данных в диапазоне входного сигнала. 3 н. и 10 з.п. ф-лы, 10 ил.
1. Система горизонтально-наклонного бурения, имеющая динамически изменяемое управление, содержащая бурильную трубу, выполненную с возможностью скрепления с бурильным инструментом, орган управления пользователя, имеющий устройство ввода данных, перемещаемое в положение в диапазоне входного сигнала, и выполненный с возможностью вывода сигнала управления, пропорционального положению устройства ввода данных в диапазоне входного сигнала, насос, имеющий диапазон производительности и выполненный с возможностью перемещения бурильной трубы при различных уровнях производительности в диапазоне производительности на основании сигнала управления, и контроллер, соединенный с органом управления пользователя и насосом и выполненный с возможностью исполнения команд программы, сохраненных в запоминающем устройстве, для выполнения системой горизонтально-наклонного бурения следующих действий:
выполнение операций бурения при первой настройке управления, в которой диапазон производительности насоса соответствует диапазону входного сигнала органа управления пользователя, и изменения в производительности насоса являются пропорциональными изменениям положения устройства ввода данных в диапазоне входного сигнала;
выполнение операций бурения при второй настройке управления, в которой диапазон производительности насоса ограничен пределом производительности, и изменения в производительности насоса пропорционально изменяют в зависимости от изменения положения устройства ввода данных в диапазоне входного сигнала.
2. Система по п.1, в которой контроллер выполнен с возможностью динамически изменяемого управления работой указанной системы от первой настройки управления ко второй настройке управления без прерывания перемещения бурильной трубы, связанной с уменьшением производительности насоса, и/или исполнения сохраненных команд программы для обеспечения динамически изменяемого управления указанной системы от второй настройки управления к первой настройке управления без прерывания перемещения бурильной трубы, связанного с уменьшением производительности насоса при установке устройства ввода данных в нейтральное положение диапазона входного сигнала, при второй настройке управления и переключенном тумблере.
3. Система по п.1 или 2, в которой предел производительности при второй настройке управления основан на, по меньшей мере, одном из следующего:
уровне сигнала управления, соответствующем уровню производительности насоса при первой настройке управления при переключенном тумблере;
уровне сигнала управления, соответствующем уровню производительности насоса при первой настройке управления, который поддерживался в течение периода времени, начинающегося при переключенном тумблере;
постоянной величине производительности и уровне сигнала управления, соответствующем уровню производительности насоса при первой настройке управления при переключенном тумблере.
4. Система по п.1 или 2, в которой контроллер дополнительно выполнен с возможностью исполнения сохраненных команд программы для калибровки указанной системой полного диапазона производительности насоса по полному диапазону входного сигнала органа управления пользователя при первой настройке управления и/или исполнения сохраненных команд программы для калибровки указанной системой полного диапазона производительности насоса по полному диапазону входного сигнала органа управления пользователя при первой настройке управления, при этом диапазон производительности насоса, ограниченный пределом производительности при второй настройке управления, пропорционально соответствует полному диапазону входного сигнала органа управления пользователя; и/или
исполнения сохраненных команд программы для изменения указанной системой диапазона производительности насоса, ограниченного пределом производительности, по полному диапазону входного сигнала органа управления пользователя при установке устройства ввода данных в нейтральное положение диапазона входного сигнала при второй настройке управления; и/или
исполнения сохраненных команд программы для изменения указанной системой предела производительности в ответ на ввод данных пользователя и, затем изменения диапазона производительности насоса, ограниченной скорректированным пределом, до полного диапазона входного сигнала органа управления пользователя при второй настройке управления.
5. Система по п.1 или 2, в которой насос выполнен с возможностью вращения бурильной трубы при различных уровнях производительности в диапазоне производительности на основании сигнала управления, при этом предел производительности соответствует пределу скорости вращения и/или пределу давления насоса рабочей жидкости гидросистемы, и/или линейного продвижения бурильной трубы при различных уровнях производительности в диапазоне производительности на основании сигнала управления, при этом предел производительности соответствует пределу скорости продвижения и/или пределу давления насоса рабочей жидкости гидросистемы.
6. Способ горизонтально-наклонного бурения с динамически изменяемым управлением, содержащий следующие стадии:
перемещение бурильной колонны с использованием насоса, работающего на уровне производительности диапазона производительности, соответствующем положению органа управления вводом данных в диапазоне входного сигнала при первой настройке управления;
изменение уровня производительности насоса при первой настройке управления, при этом изменения уровня производительности насоса при первой настройке управления являются пропорциональными изменениям положения органа управления вводом данных в диапазоне входного сигнала;
переход от первой настройки управления ко второй настройке управления с поддержанием, по меньшей мере, некоторого перемещения бурильной колонны;
определение предела производительности диапазона производительности насоса;
перемещение бурильной колонны с использованием насоса при второй настройке управления, при этом диапазон производительности насоса ограничен пределом производительности при второй настройке управления;
изменение уровня производительности насоса при второй настройке управления, при этом изменения в уровне производительности насоса в диапазоне производительности при второй настройке управления пропорциональны изменениям положения органа управления вводом данных в диапазоне входного сигнала.
7. Способ по п.6, дополнительно содержащий идентификацию необходимого изменения в производительности насоса при первой настройке управления, обнаружение того, что необходимое изменение в производительности насоса является слишком малым для осуществления изменением положения органа управления вводом данных в диапазоне входного сигнала при первой настройке управления;
переход от первой настройки управления ко второй настройке управления для увеличения чувствительности между органом управления ввода данных и производительностью насоса;
выполнение необходимого изменения производительности насоса с использованием второй настройки управления.
8. Способ по п.6 или 7, в котором производительность насоса и связанное с ней перемещение бурильной колонны не изменяется при переходе от первой настройки управления ко второй настройке управления.
9. Способ по п.6 или 7, в котором предел производительности при второй настройке управления основан на уровне производительности насоса, соответствующем положению органа управления вводом данных в диапазоне входного сигнала, когда тумблер переключен в первую настройку управления, или на уровне производительности насоса, соответствующем положению органа управления вводом данных в диапазоне входного сигнала, который поддерживался в течение некоторого периода времени после переключения тумблера в первую настройку управления, или на постоянной величине выходного сигнала и уровне производительности насоса, соответствующим положению органа управления вводом данных в диапазоне входного сигнала, когда тумблер переключен в первую настройку управления.
10. Способ по п.6 или 7, дополнительно содержащий калибровку полного диапазона производительности насоса по полному диапазону входного сигнала органа управления при первой настройке управления, при этом диапазон производительности насоса, ограниченный пределом производительности при второй настройке управления, пропорционально соответствует полному диапазону входного сигнала органа управления пользователя, и/или пропорциональное изменение диапазона производительности насоса, ограниченного пределом производительности, до полного диапазона входного сигнала органа управления пользователя, когда орган управления ввода данных установлен в нейтральное положение диапазона входного сигнала при второй настройке управления, и/или изменение предела производительности в ответ на ввод данных пользователя, и последующее изменение диапазона производительности насоса, ограниченного скорректированным пределом производительности, до полного диапазона входного сигнала органа управления вводом данных при второй настройке управления.
11. Способ по п.6 или 7, в котором перемещение бурильной колонны с использованием насоса при первой и второй настройках управления содержит вращение бурильной колонны с использованием гидравлического насоса вращения, соответствующего насосу, в котором изменение уровня производительности насоса при первой и второй настройках управления дополнительно содержит изменение скорости вращения и/или давления рабочей жидкости гидросистемы гидравлического насоса вращения, и в котором предел производительности соответствует максимальной скорости вращения и/или максимальному давлению рабочей жидкости гидросистемы гидравлического насоса вращения, и/или линейное перемещение бурильной колонны с использованием гидравлического насоса осевого напора, соответствующего насосу, в котором изменение уровня производительности насоса при первой и второй настройках управления дополнительно содержит изменение скорости перемещения и/или давления рабочей жидкости гидросистемы гидравлического насоса осевого напора, и в котором предел производительности соответствует максимальной скорости перемещения и/или максимальному давлению рабочей жидкости гидросистемы гидравлического насоса осевого напора.
12. Система горизонтально-наклонного бурения с динамически изменяемым управлением, содержащая средство перемещения бурильной колонны, использующее насос, работающий на уровне производительности диапазона производительности, соответствующем положению органа управления вводом данных в диапазоне входного сигнала при первой настройке управления; средство изменения уровня производительности насоса при первой настройке управления, при этом изменения уровня производительности насоса при первой настройке управления являются пропорциональными изменениям положения органа управления вводом данных в диапазоне входного сигнала; средство для перехода от первой настройки управления ко второй настройке управления с поддержанием, по меньшей мере, некоторого перемещения бурильной колонны; средство определения предела производительности в диапазоне производительности насоса; средство перемещения бурильной колонны, использующее насос при второй настройке управления, причем диапазон производительности насоса ограничен пределом производительности при второй настройке управления; средство изменения уровня производительности насоса при второй настройке управления, при этом изменения в уровне производительности насоса в диапазоне производительности при второй настройке управления пропорциональны изменениям положения органов управления вводом данных в диапазоне входного сигнала.
13. Система по п.12, в которой производительность насоса и связанное с ней перемещение бурильной колонн не изменяется во время перехода от первой настройки управления ко второй настройке управления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| АВТОМАТИЗИРОВАННЫЙ НАВИГАЦИОННЫЙ БУРОВОЙ КОМПЛЕКС ДЛЯ ПРОКЛАДКИ КОММУНИКАЦИЙ | 2002 |
|
RU2215874C1 |
| US 6554082 B2, 29.04.2003 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

