Область техники, к которой относится изобретение
[0001] Изобретение относится к автоматическим обвязочным упаковочным машинам и к автоматическим обвязочным упаковочным системам.
Уровень техники
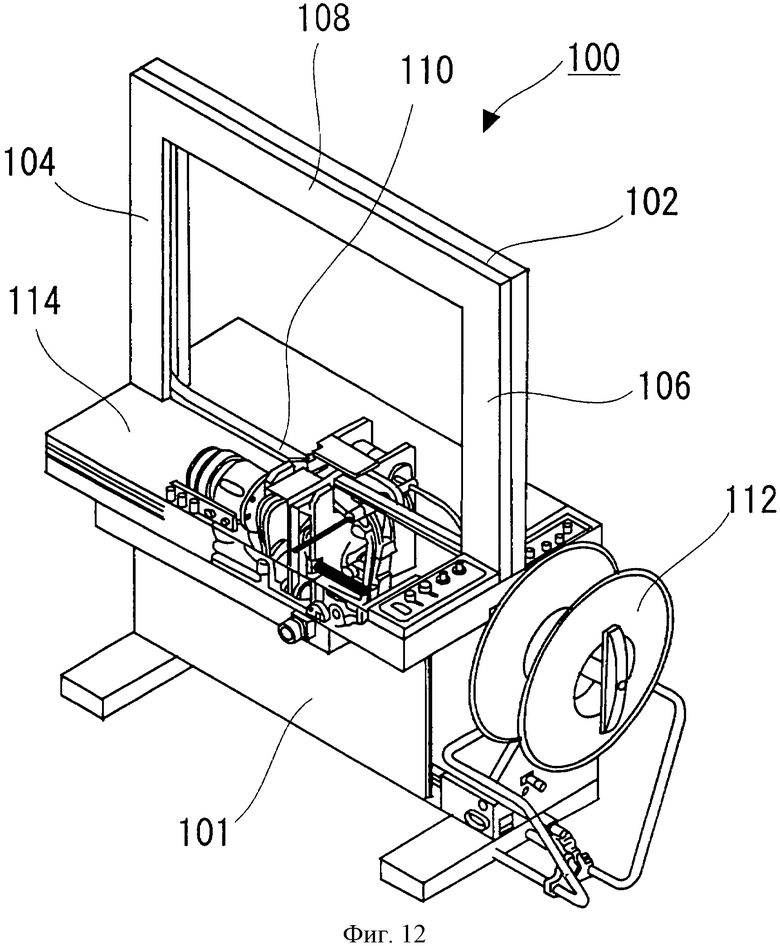
[0002] В условиях, когда необходимо сокращать трудозатраты при упаковочных работах, широкое применение нашла, например, автоматическая обвязочная упаковочная машина 100, показанная на Фиг.12, которая описывается в патентном документе 1 (японская патентная публикация №Н5(1993)-112315).
[0003] Автоматическая обвязочная упаковочная машина 100, как показано на Фиг.12, имеет корпус 101 упаковочной машины, установленный на поверхности пола цеха, а на верхней стороне корпуса 101 имеется стол 114 с верхней поверхностью, представляющий собой рабочее основание для укладки и упаковки объекта, который требуется упаковывать.
[0004] На столе 114 с верхней поверхностью устанавливается вертикально направляющая ленту арка 102, имеющая существенно U-образную форму, которая задает направление движения непрерывной ленты, которая не показана.
[0005] Таким образом, направляющая ленту арка 102 составляется из вертикальных стоек 104, 106, расположенных на расстоянии параллельно друг другу, и верхней перекладины 108, соединяющей верхние концы вертикальных стоек 104, 106, формируя направление движения ленты.
[0006] С другой стороны, на столе 114 с верхней поверхностью узкая направляющая выемка 110 формируется вдоль центральной части, соединяется с проходом для ленты, определяющимся направляющей ленту аркой 102.
[0007] В такой автоматической обвязочной упаковочной машине 100 объект, который должен упаковываться, помещается внутри рамы направляющей ленту арки 102, лента подается лентопротяжным механизмом, который не показан на Фиг.12, при соответствующем нажатии кнопок с катушки 112, на которую лента намотана, в направлении, определяемом направляющей ленту аркой 102, содержащей вертикальные стойки 104, 106 и верхнюю перекладину 108, через направляющую выемку 110. При этом осуществляется серия операций, включая обратное натяжение ленты, скрепление ленты и дополнительную сварку ленты, осуществляющиеся существенно в то же время, как происходит автоматическая резка, причем все операции осуществляются автоматически.
[0008] На выходе из установки в некоторых случаях объект, который следует упаковывать, обвязывается перекрестно.
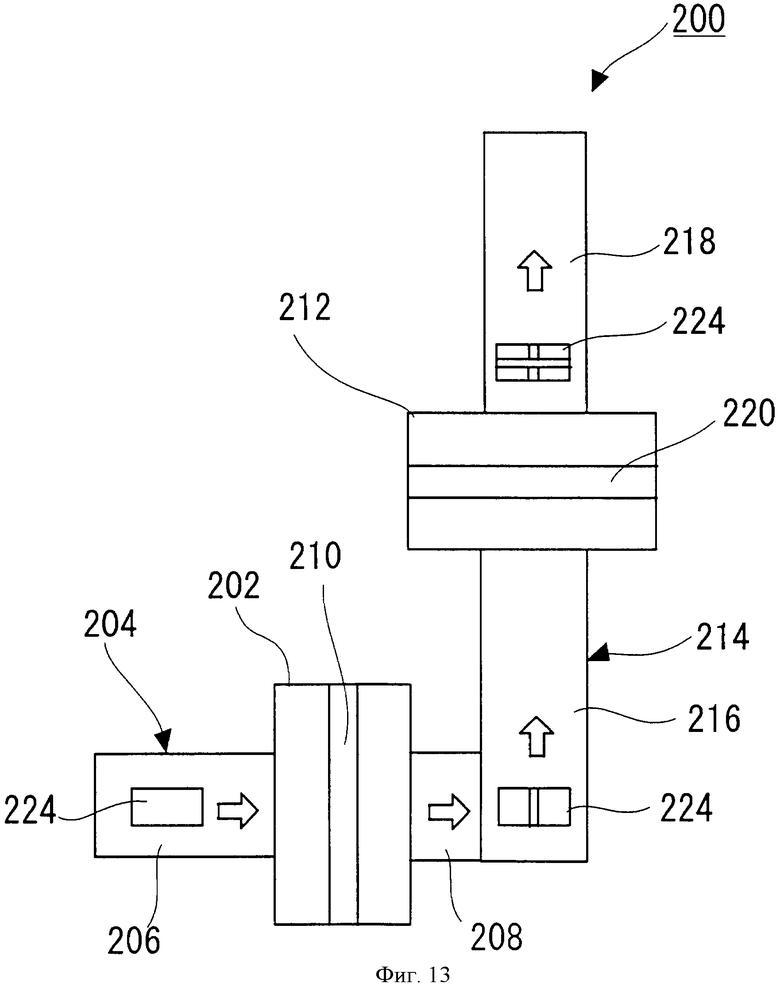
[0009] В этом случае автоматическая обвязочная упаковочная система 200, устанавливающаяся на конвейерной линии, используется с двумя автоматическими обвязочными упаковочными машинами 100 обычной конфигурации, как показано на Фиг.12.
[0010] Как показано на Фиг.13, на верхней по движению стороне автоматической обвязочной упаковочной системы 200 устанавливается первая обвязочная упаковочная машина 202 и первая конвейерная линия 204, соединяющаяся с первой обвязочной упаковочной машиной 202.
[0011] Первая конвейерная линия 204 представляет собой конвейер и содержит первое вносящее устройство 206, соединенное с входной стороной первой автоматической обвязочной упаковочной машины 202 и первым выносным устройством 208, соединенным с выносной стороной первой автоматической обвязочной упаковочной машины 202.
[0012] Первая автоматическая обвязочная упаковочная машина 202 устанавливается так, что направление транспортировки первой конвейерной линии 204, т.е. направление транспортировки первого вносящего устройства 206 и первого выносящего конвейера 208 пересекает направление верхней арки 210 первой автоматической обвязочной упаковочной машины 202 под прямым углом.
[0013] На нижней по движению стороне автоматической обвязочной упаковочной системы 200 для последующей обвязки устанавливается вторая автоматическая обвязочная упаковочная машина 212, и вторая конвейерная линия 214 соединяется со второй автоматической обвязочной упаковочной машиной 212.
[0014] Вторая конвейерная линия 214 представляет собой конвейер и содержит второе вносящее устройство 216, соединенное с входной стороной второй автоматической обвязочной упаковочной машины 212 и вторым выносящим устройством 218, соединенным с выносной стороной первой автоматической обвязочной упаковочной машины 212.
[0015] Вторая автоматическая обвязочная упаковочная машина 212 устанавливается так, что направление транспортировки первой конвейерной линии 214, т.е. направление транспортировки второго вносящего устройства 216 и первого выносящего конвейера 218 пересекает направление верхней арки 220 второй автоматической обвязочной упаковочной машины 212 под прямым углом.
[0016] В этой автоматической обвязочной упаковочной системе 200, как показывается на Фиг.13, направление транспортировки первой конвейерной линии 204 и второй конвейерной линии 214 соединяются так, что они пересекаются друг с другом под прямым углом.
[0017] Поэтому в автоматической обвязочной упаковочной системе 200, имеющей указанную выше конструкцию, упаковка осуществляется следующим образом.
[0018] В самом начале процесса объект 224, который следует упаковывать, доставляется первым вносящим конвейером 206 первой конвейерной линии 204, как показано на Фиг.13, и переносится на первую автоматическую обвязочную упаковочную машину 202. На этой первой автоматической обвязочной упаковочной машине 202 осуществляется первая обвязка в направлении, ортогональном направлению транспортировки первой конвейерной линии 204 (объект 224, который следует упаковывать, показан на Фиг.13 в правой нижней части).
[0019] Затем с помощью первого выносящего конвейера 208 первой конвейерной линии 204 объект 224, который следует упаковывать, который был один раз обвязан, удаляется с первой автоматической обвязочной упаковочной машины 202 и переносится на второе вносящее устройство 216 второй конвейерной линии 214 на нижней по движению стороне, расположенное на нижней по движению стороне первой конвейерной линии 204, и укладывается под прямым углом к первой конвейерной линии 204 с помощью перемещающего устройства, такого как транспортная тележка (не показана).
[0020] От первой автоматической обвязочной упаковочной машины 202 объект 224, который следует упаковывать, на котором выполнена первая обвязка, переносится вторым вносящим устройством 216, как показано стрелкой на Фиг.13, на вторую автоматическую обвязочную упаковочную машину 212, на которой осуществляется следующая обвязка в перекрестном направлении, ортогональном по отношению к направлению первой обвязки.
[0021] На второй автоматической обвязочной упаковочной машине 212 обвязка осуществляется в направлении, ортогональном направлению перемещения второго вносящего устройства 216, как показано на объекте 224, который следует упаковывать, в правой верхней части Фиг.13. Из Фиг.13 следует, что на объекте 224, который следует упаковывать, выполняется поперечная обвязка.
[0022] Однако в такой известной автоматической обвязочной упаковочной системе, показанной на Фиг.13, как указывалась выше, требуется, чтобы первая конвейерная линия 204 и вторая конвейерная линия 214 устанавливались ортогонально друг к другу, и первая автоматическая обвязочная упаковочная машина 202 для выполнения первой обвязки, и вторая автоматическая обвязочная упаковочная машина 212 для выполнения следующей обвязки устанавливались соответственно на первой конвейерной линии 204 и на второй конвейерной линии 214.
[0023] Это означает, что, как показано на Фиг.13, когда используются две установки, первая автоматическая обвязочная упаковочная машина 202 и вторая автоматическая обвязочная упаковочная машина 212, первое вносящее устройство 206 и первое выносящее устройство 208 первой конвейерной линии 204, выполненные в виде конвейера или подобного устройства, должны устанавливаться в направлении, ортогональном по отношению к верхней арке 210 первой автоматической обвязочной упаковочной машины 202.
[0024] Таким же образом, в отношении второй автоматической обвязочной упаковочной машины 212 следует указать, что второе вносящее устройство 216 и второе выносящее устройство 218 второй конвейерной линии 214 должны устанавливаться в направлении, ортогональном по отношению к верхней арке 220. Кроме того, требуется перемещающее устройство, такое как транспортная тележка, между первой конвейерной линией 204 и второй конвейерной линией 214.
[0025] Как указывалось выше, в случае перекрестного обвязывания объекта 224, который следует упаковывать, в режиме, показанном на Фиг.13, в связи с тем, что необходимо устанавливать первую конвейерную линию 204 и вторую конвейерную линию 214 в направлении, ортогональном друг к другу, требуется значительное пространство для расположения первой конвейерной линии 204 и второй конвейерной линии 214, отдельно требуется переносное устройство, такое как транспортная тележка, и конструкция всего устройства становится сложной, создавая проблемы.
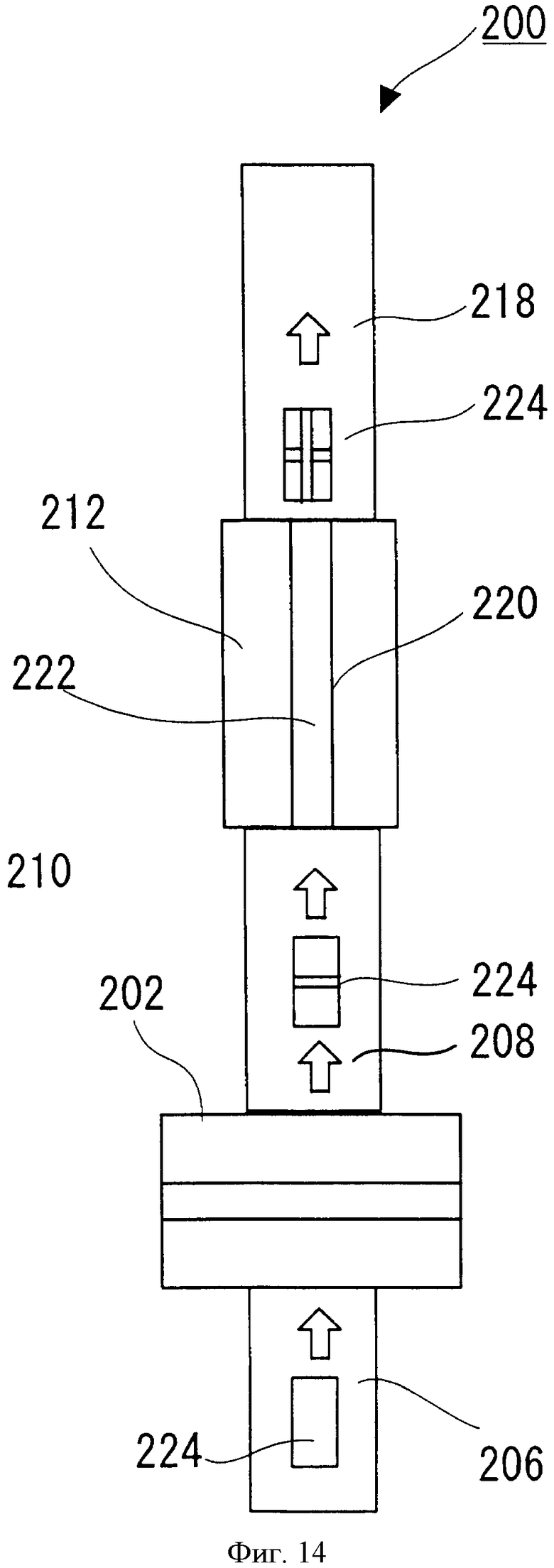
[0026] Для решения проблем, связанных с пространством, автоматическая обвязочная упаковочная система может иметь конструкцию, показанную на Фиг.14, когда первая конвейерная линия 204 и вторая конвейерная линия 214 ориентируются вдоль одной линии.
[0027] Однако в этом случае, как показано на Фиг.14, верхняя арка 220 направляющей ленту арки 222 второй автоматической обвязочной упаковочной машины 212, осуществляющей следующую обвязку, располагается параллельно направлению транспортировки второй конвейерной линии 214.
[0028] Таким образом, даже если объект 224, который следует упаковывать, на который уже была наложена первая обвязка, будет перемещаться вторым вносящим устройством 216 во вторую автоматическую обвязочную упаковочную машину 212, вертикальная часть направляющей ленту арки 222 второй автоматической обвязочной упаковочной машины 212 оказывается на пути перемещения объекта 224, который следует упаковывать, и этот объект не может вводиться во вторую автоматическую обвязочную упаковочную машину 212, и он не может снова обвязываться.
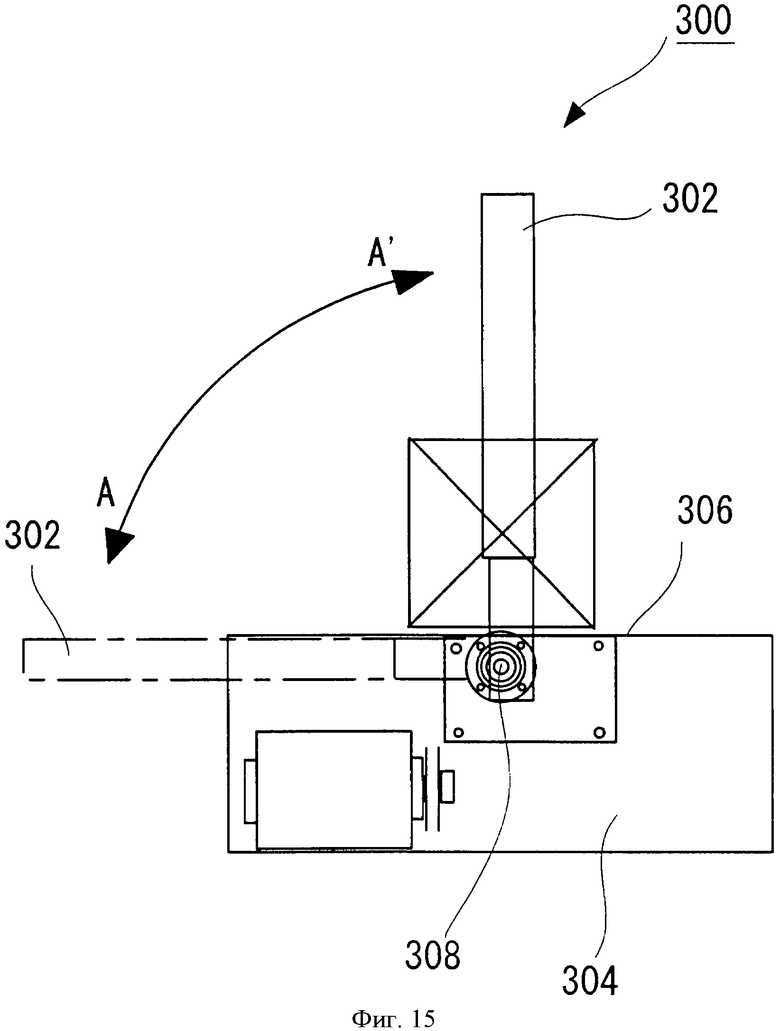
[0029] Для того чтобы решить указанную выше проблему, в патентном документе 2 (японская патентная публикация №2006-290431) предлагается автоматическая обвязочная упаковочная машина, имеющая такую конструкцию, в которой направляющая ленту арка может наклоняться на 90° по отношению к корпусу упаковочной машины, как показано на Фиг.15.
[0030] Таким образом, как показано на Фиг.15, в данной автоматической обвязочной упаковочной машине 300 направляющая ленту арка 302 автоматической обвязочной упаковочной машины 300 выполняется с возможностью наклона в направлении, показанном стрелкой А-А1 по отношению к столу 306 с верхней поверхностью корпуса 304 упаковочной машины, а обычно используется в вертикальном положении к этому столу 306 с верхней поверхностью.
[0031] Другими словами, направляющая ленту арка 302 устанавливается с возможностью вращения на поворотном валу 308, располагающемся немного ниже верхней поверхности стола 306. При наклоне в направлении, указанном стрелкой А, вся арка, вращающаяся вокруг поворотного вала 308 как оси вращения с помощью приводного наклоняющего механизма, который не показан, укладывается вдоль верхней поверхности стола 306.
[0032] Обвязка осуществляется, когда направляющая ленту арка 302 находится в вертикальном положении, как показано сплошной линией на Фиг.15, и она может при необходимости наклонятся на 90° в лежачее положение, как показано прерывистой линией.
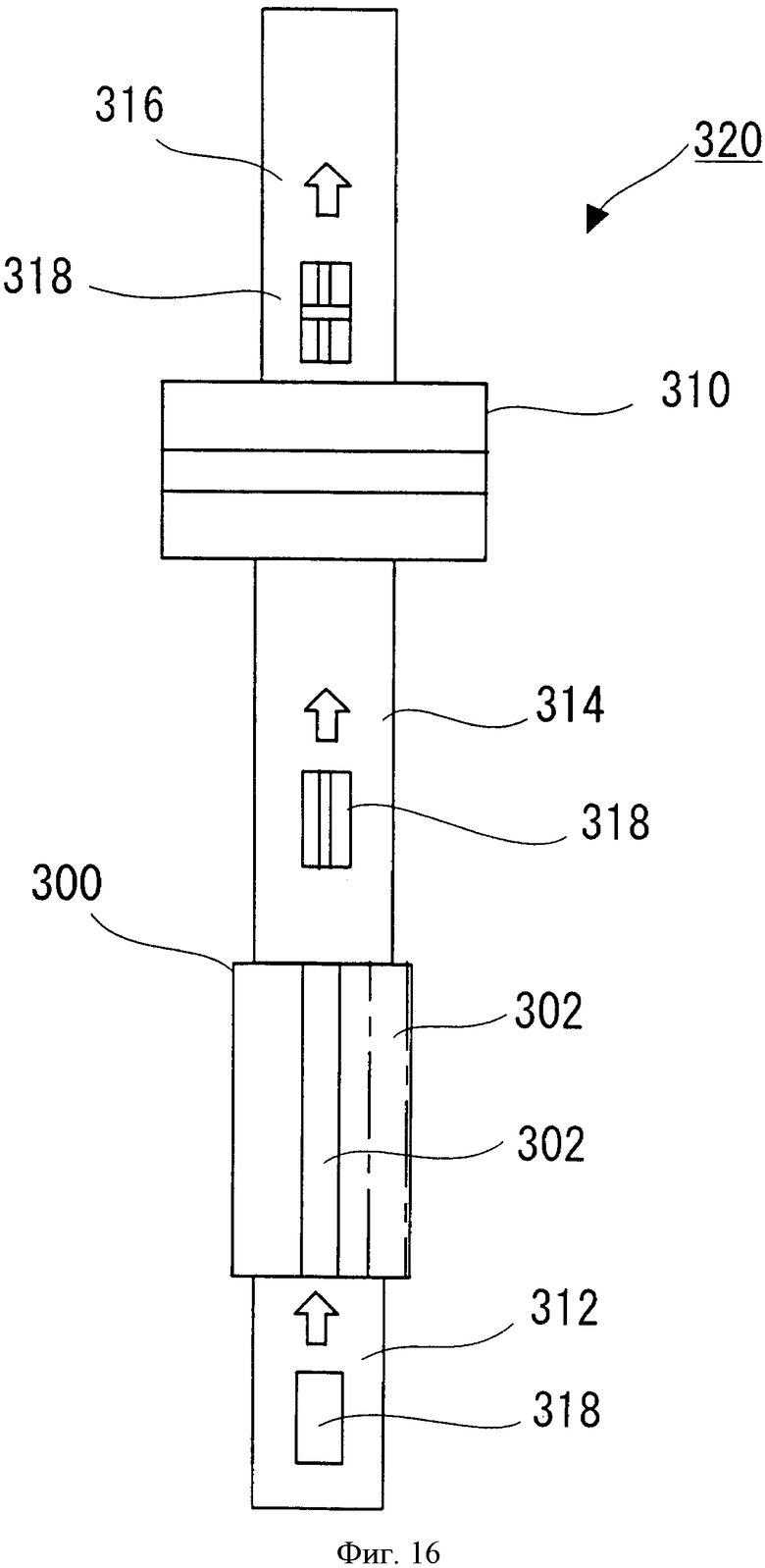
[0033] В патентом документе 2 также предлагается конструкция автоматической обвязочной упаковочной системы 320 с использованием одной автоматической обвязочной упаковочной машины 300 такой конструкции, как показана на Фиг.15, и второй обычной автоматической обвязочной упаковочной машины 310, имеющей конструкцию, показанную на упомянутой выше Фиг.12, при этом первая конвейерная линия 312, вторая конвейерная линия 314 и третья конвейерная линия 316 устанавливаются в прямом направлении, как показано на Фиг.16.
[0034] Таким образом, сначала направляющая ленту арка 302 первой автоматической обвязочной упаковочной машины 300 устанавливается в лежачем положении на столе 306 с верхней поверхностью, как показано прерывистой линией на Фиг.15 и 16. В состоянии, когда направляющая ленту арка 302 находится в лежачем положении, объект 318, который следует упаковывать, движущийся в направлении, показанном стрелкой, на первой конвейерная линии 312, не задевает направляющую ленту арку 302 и не нарушает подачи.
[0035] Когда с помощью детекторных средств, таких как, например, фотоэлектрические датчики, не показанные, устанавливается тот факт, что объект 318, который следует упаковывать, внесен в первую автоматическую обвязочную упаковочную машину 300 и достиг требующегося положения на верхней поверхности стола 306, направляющая ленту арка 302 поворачивается в направлении, указанном стрелкой А', с помощью приводного средства, такого как электродвигатель или пневматический цилиндр, и устанавливается в вертикальное положение.
[0036] В состоянии, при котором направляющая ленту арка 302 находится обычно в вертикальном положении, как упоминается выше, осуществляется первая обвязка в направлении, параллельном направлению движения первой конвейерной линии 312 (см. объект 318, который следует упаковывать, на второй конвейерной линии 314 на Фиг.16).
[0037] После этого на автоматической обвязочной упаковочной машине 300, выполненной таким образом, что объект 318, который следует упаковывать и который был в первый раз обвязан, подается второй конвейерной линией 314, и на второй автоматической обвязочной упаковочной машине 310 осуществляется обвязка в направлении, ортогональном второй конвейерной линии 314, при этом на объекте 318, который следует упаковывать, получается перекрестная обвязка, а сам объект 318, который следует упаковывать, удаляется третьей конвейерной линией 316 (см. объект 318, который следует упаковывать, на третьей конвейерной лини на Фиг.16).
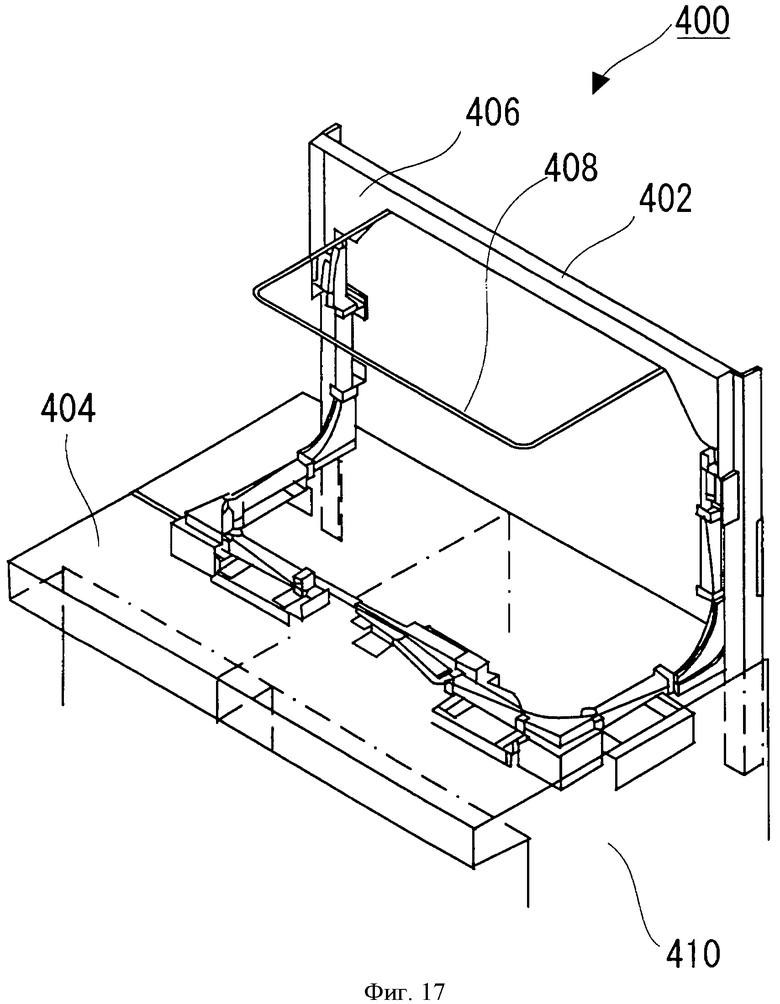
[0038] В патентном документе 3 (японская патентная публикация №2006-315746) предлагается автоматическая обвязочная упаковочная машина 400 другой конструкции. В этой автоматической обвязочной упаковочной машине 400 направляющая ленту арка 402 устанавливается вертикально со смещением к задней части стола 404 с верхней поверхностью.
[0039] В этой автоматической обвязочной упаковочной машине 400 центральная планка 408 выполнена с возможностью наклона в области, расположенной ниже горизонтальной арки 406 направляющей ленту арки 402, и лента, втягивающаяся назад в корпус 410 упаковочной машины 410 из направляющей ленту арки 402, получается центральной планкой 408 и затем опускается вниз.
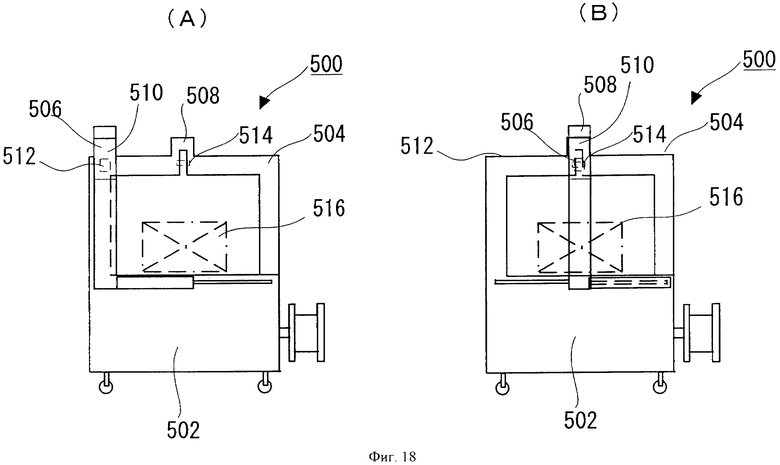
[0040] С другой стороны, в патентном документе 4 (японская патентная публикация №S61(1986)-127410) раскрывается автоматическая обвязочная упаковочная машина 500, показанная на Фиг.18.
[0041] Как видно, эта автоматическая обвязочная упаковочная машина 500 имеет две арки 504, 506 в корпусе 502 упаковочной машины, при этом внутренняя арка 504 устанавливается вертикально около центра корпуса 502 упаковочной машины так, что лента оборачивается в арке для упаковки, в то время как другая наружная арка 506 устанавливается так, что она находится поперек внутренней арки 504 под прямым углом.
[0042] Устройство выполнено таким образом, что вертикальное плечо наружной арки 506 устанавливается в таком положении, что оно не мешает доступу объекта 516, который следует упаковывать, в корпус 502 упаковочной машины, и затем вертикальное плечо наружной арки 506 перемещается в положение для упаковки после прохода объекта, лента заворачивается внутрь, и лента наружной арки 506 пересекает лену внутренней арки 504 вертикально таким образом, что объект 516 может упаковываться.
Патентный документ 1: японская патентная публикация №Н5(1993)-112315
Патентный документ 2: японская патентная публикация №2006-290431
Патентный документ 3: японская патентная публикация №2006-315746
Патентный документ 4: японская патентная публикация №S61(1986)-127410
Раскрытие изобретения
Проблема, которую решает изобретение
[0043] Однако в автоматической обвязочной упаковочной машине 300 в соответствии с патентным документом 2 конфигурация наклоняющего механизма, служащего для наклона направляющей ленту арки 302, сложная, у устройства снижается срок службы и безопасность, а также повышается стоимость, что в совокупности является значительной проблемой.
[0044] При использовании автоматической обвязочной упаковочной машины 400 в соответствии с патентным документом 3 в связи с тем, что направляющая ленту арка 402 устанавливается вертикально со смещением к задней части стола 404 с верхней поверхностью, угловая часть увеличивается, и подача ленты заканчивается, когда лента подается на направляющую ленту арку, что представляет собой проблему.
[0045] Кроме того, при использовании автоматической обвязочной упаковочной машины 500 в соответствии с патентным документом 4, в которой внутренняя арка 504 и внешняя арка 506 пересекают друг друга под прямым углом, как показано на Фиг.18, требуется конфигурация, при которой выступающий механизм 508 внутренней арки 504 соответствует зазору 510 наружной арки 506. Кроме того, необходима сложная конфигурация, при которой короткая и небольшая направляющая 514 ленты в выступающем механизме 508 внутренней арки 504 входит в середину направляющей 512 ленты наружной арки 506, и короткая и небольшая направляющая 512 ленты, и короткая и небольшая направляющая 514 ленты соединяются друг с другом и обеспечивают необходимый оборот ленты в наружной арке 506, что в совокупности приводит к значительной стоимости устройства.
[0046] Настоящее изобретение было вызвано указанными обстоятельствами, и его целью является создание автоматической обвязочной упаковочной машины и на ее основе - автоматической обвязочной упаковочной системы, в которой конвейерные линии для транспортировки объекта, который следует упаковывать, могут устанавливаться в одном направлении, занимая небольшое пространство. При этом вся конструкция может быть упрощена, а кроме того, подача ленты на направляющую ленту арку может быть устойчивой, делая возможной непрерывную работу.
Средства для решения проблемы
[0047] Настоящее изобретение было создано для решения тех проблем, которые были типичны для упаковочных машин, известных в уровне техники. Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением содержит:
корпус упаковочной машины, включающий стол с верхней поверхностью, на которую подается объект, который следует упаковывать;
пару вертикальных направляющих ленту арок, располагающихся над верхней поверхностью стола в направлении, параллельном направлению движения объекта, который следует упаковывать, отдельно друг от друга;
горизонтальную направляющую ленту арки, устанавливающуюся над верхней поверхностью стола в направлении, параллельном направлению движения объекта, который следует упаковывать,
причем пара вертикальных направляющих ленту арок выполнена с возможностью перемещаться между положением ожидания, когда они отделены от горизонтальной направляющей ленту арки в направлении, ортогональном к направлению перемещения объекта, который следует упаковывать, и положением соединения с горизонтальной направляющей ленту аркой.
[0048] При указанной выше конфигурации, когда объект, который следует упаковывать, должен вноситься в автоматическую обвязочную упаковочную машину, пара вертикальных направляющих ленту арок располагается в направлении, параллельном направлению движения объекта, который следует упаковывать, отдельно одна от другой в положении ожидания, когда они отделены от горизонтальной направляющей ленту арки в направлении, ортогональном направлению движения объекта, который следует упаковывать. При этом при внесении объекта, который следует упаковывать, в положение упаковки в автоматическую обвязочную упаковочную машину, вертикальные направляющие ленту арки не находятся на пути перемещения объекта, который следует упаковывать, и указанный объект может свободно вноситься в положение упаковки в автоматической обвязочной упаковочной машине.
[0049] В состоянии, когда объект, который следует упаковывать, уже внесен в положение упаковки в автоматической обвязочной упаковочной машине, пара вертикальных направляющих ленту арок, располагавшихся отдельно друг от друга, перемещается из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой.
[0050] В результате этого перемещения пара вертикальных направляющих ленту арок и горизонтальная направляющая ленту арка формируют U-образную направляющую ленту арку, внутри которой образуется проход для ленты, и при подаче ленты так, чтобы она двигалась через этот проход для ленты, лента будет устойчиво подаваться через направляющую ленту арку.
[0051] В этом состоянии выполняется несколько упаковочных операций, включая натяжение ленты, соединение ленты и, в дополнение к этому, сварка ленты, которые осуществляются практически одновременно с обрезкой, причем все операции осуществляются автоматически, при этом объект, который следует упаковывать, может обвязываться в направлении, параллельном направлению движения самого объекта, который следует упаковывать.
[0052] Следует также указать, что автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением отличается тем, что горизонтальная направляющая ленту арка устанавливается на верхней стороне вертикальных направляющих ленту арок.
[0053] При такой конфигурации в состоянии, когда пара вертикальных направляющих ленту арок перемещается из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой, парой вертикальных направляющих ленту арок и горизонтальной направляющей ленту аркой составляется U-образная направляющая ленту арка, внутри которой формируется проход для ленты.
[0054] В результате при подаче ленты так, что она движется через проход для ленты, осуществляется серия упаковочных операций, включающая обратное вытягивание ленты, скрепление ленты, и, кроме того, сварка ленты, осуществляющаяся существенно в то же время, как происходит автоматическая резка, причем все операции осуществляются автоматически. При этом объект, который следует упаковывать, может обвязываться в направлении, параллельном направлению, в котором движется сам объект, который следует упаковывать.
[0055] Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением отличается также тем, что горизонтальная направляющая ленту арка фиксируется в положении над столом с верхней поверхностью.
[0056] При такой конструкции нет необходимости двигать горизонтальную направляющую ленту арку, а требуется только сдвигать пару вертикальных направляющих ленту арок из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой, что приводит к упрощению конструкции и снижению стоимости.
[0057] Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением отличается также тем, что горизонтальная направляющая ленту арка выполняется с возможностью изменять свое положение, двигаясь над столом с верхней поверхностью в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать.
[0058] В такой конструкции при движении горизонтальной направляющей ленту арки в произвольное положение в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, над столом с верхней поверхностью, и при движении пары вертикальных направляющих ленту арок, установленных отдельно друг от друга, из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой для осуществления обвязки, указанный объект может обвязываться параллельно направлению, по которому движется этот объект.
[0059] Поэтому при различных положениях в направлении, ортогональном направлению движения объекта, который следует упаковывать, обвязывание может выполняться параллельно направлению движения объекта, который следует упаковывать, и при этом обеспечивается плотная обвязка.
[0060] Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением отличается также тем, что горизонтальная направляющая ленту арка располагается в нескольких положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать.
[0061] В такой конструкции при движении вертикальных направляющих ленту арок, располагающихся отдельно друг от друга, из положения ожидания в положение соединения с несколькими горизонтальными направляющими ленту арками для осуществления соответствующей обвязки в нескольких произвольных положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, при этом указанный объест-может обвязываться в направлении, параллельном направлению движения этого объекта, который следует упаковывать.
[0062] В связи с этим в нескольких положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, указанный объект может обвязываться в направлении, параллельном направлению движения этого объекта, который следует упаковывать, при этом обеспечивается плотная обвязка.
[0063] Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением оборудуется также следующим средством:
приводное средство для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, отличающееся тем, что оно выполняется с возможностью изменять положение пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, с помощью рычажного механизма, соединяющего цилиндр и пару вертикальных направляющих ленту арок.
[0064] Благодаря применению цилиндра и рычажного механизма в качестве средства привода для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, пара вертикальных направляющих ленту арок может перемещаться в положение ожидания и в положение соединения в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, более устойчиво, при этом обеспечивая более аккуратную обвязку.
[0065] Автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением оборудуется также следующим средством:
средство привода для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, отличающееся тем, что оно выполняется с возможностью изменять положение пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, с помощью шагового двигателя.
[0066] Благодаря применению шагового двигателя в качестве средства привода для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, пара вертикальных направляющих ленту арок может перемещаться в положение ожидания и в положение соединения в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, более устойчиво, при этом обеспечивая более аккуратную обвязку.
[0067] Автоматическая обвязочная упаковочная система в соответствии с настоящим изобретение представляет собой автоматическую обвязочную упаковочную систему для обвязки объекта, который следует упаковывать, в поперечных направлениях, в которой две автоматические обвязочные упаковочные машины устанавливаются рядом, причем направление движения объекта, который должен упаковываться, является прямой линией. Одна из автоматических обвязочных упаковочных машин является автоматической обвязочной упаковочной машиной, описывающейся в любом из п.п.1-7, а другая автоматическая обвязочная упаковочная машина выполняется с возможностью обвязывания объекта, который следует упаковывать, в направлении, ортогональном направлению движения объекта, который следует упаковывать на автоматической обвязочной упаковочной машине.
[0068] При такой конфигурации объект, который следует упаковывать, может обвязываться одной автоматической обвязочной упаковочной машиной параллельно направлению движения объекта, который следует упаковывать, а обвязка и пакетирование могут осуществляться другой автоматической обвязочной упаковочной машиной в направлении, ортогональном к направлению движения объекта, который должен упаковываться автоматической обвязочной упаковочной машиной, при этом осуществляется перекрестная обвязка указанного объекта.
[0069] Кроме того, если две автоматические обвязочные упаковочные машины устанавливаются рядом так, что направление движения объекта, который должен упаковываться, является прямой линией, может осуществляться перекрестная обвязка, и одна автоматическая обвязочная упаковочная машина, и другая автоматическая обвязочная упаковочная машина могут устанавливаться в прямую линию, а не под прямым углом, как ранее, при этом сокращается требующееся для установки пространство и, кроме того, упрощается вся конструкция.
[0070] Автоматическая обвязочная упаковочная система также отличается тем, что на стороне, находящейся выше по направлению движения конвейерной линии для перемещения объекта, который следует упаковывать, устанавливается одна автоматическая обвязочная упаковочная машина, а на стороне, находящейся ниже по направлению движения конвейерной линии для перемещения объекта, который следует упаковывать, устанавливается другая автоматическая обвязочная упаковочная машина.
[0071] Автоматическая обвязочная упаковочная система также отличается тем, что на стороне, находящейся ниже по направлению движения конвейерной линии для перемещения объекта, который следует упаковывать, устанавливается одна автоматическая обвязочная упаковочная машина, а на стороне, находящейся выше по направлению движения конвейерной линии для перемещения объекта, который следует упаковывать, устанавливается другая автоматическая обвязочная упаковочная машина.
[0072] Как указывается выше, одна автоматическая обвязочная упаковочная машина для обвязывания параллельно направлению движения объекта, который следует упаковывать, и другая автоматическая обвязочная упаковочная машина для обвязывания в направлении, ортогональном направлению движения объекта, который следует упаковывать, могут устанавливаться на верхней по движению стороне или на нижней по движению стороне, при этом возникает большая свобода в компоновке установки.
[0073] Автоматическая обвязочная упаковочная система в соответствии с настоящим изобретением отличается также тем, что другая автоматическая обвязочная упаковочная машина представляет собой любую автоматическую обвязочную упаковочную машину, описанную выше.
[0074] В такой конфигурации, в которой не только одна автоматическая обвязочная упаковочная машина, но и другая автоматическая обвязочная упаковочная машина представляют собой одинаковые автоматические обвязочные упаковочные машины в соответствии с настоящим изобретением, нет необходимости применять автоматическую обвязочную упаковочную машину отличающейся конструкции для осуществления упаковки, как в известных решениях, при этом становится более простой система управления.
Результат изобретения
[0075] В соответствии с настоящим изобретением, когда объект, который следует упаковывать, должен вноситься в автоматическую обвязочную упаковочную машину, пара вертикальных направляющих ленту арок располагается отдельно одна от другой в направлении, параллельном направлению движения объекта, который следует упаковывать, в положении ожидания, когда они отделены от горизонтальной направляющей ленту арки в направлении, ортогональном направлению движения объекта, который следует упаковывать. При этом вертикальные направляющие ленту арки не находятся на пути перемещения объекта, который следует упаковывать, и указанный объект может свободно вноситься в положение упаковки в автоматической обвязочной упаковочной машине.
[0076] В состоянии, когда объект, который следует упаковывать, уже внесен в положение упаковки в автоматической обвязочной упаковочной машине, пара вертикальных направляющих ленту арок, располагавшихся отдельно друг от друга, перемещаются из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой.
[0077] В результате этого перемещения пара вертикальных направляющих ленту арок и горизонтальная направляющая ленту арка формируют U-образную направляющую ленту арку, внутри которой образуется проход для ленты, и при подаче ленты так, чтобы она двигалась через этот проход для ленты, лента может устойчиво подаваться через направляющую ленту арку.
[0078] В этом состоянии выполняется несколько упаковочных операций, включая натяжение ленты, соединение ленты и, в дополнение к этому, сварка ленты, которые осуществляются практически одновременно с обрезкой, причем все операции осуществляются автоматически, при этом объект, который следует упаковывать, может обвязываться в направлении, параллельном направлению движения самого объекта, который следует упаковывать.
[0079] В соответствии с настоящим изобретением также нет необходимости перемещать горизонтальную направляющую ленту арку, а требуется только сдвигать пару вертикальных направляющих ленту арок из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой, что приводит к упрощению конструкции устройства и снижению стоимости.
[0080] В соответствии с настоящим изобретением также при движении горизонтальной направляющей ленту арки в произвольное положение в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, над столом с верхней поверхностью и при движении пары вертикальных направляющих ленту арок, установленных отдельно друг от друга, из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой для осуществления обвязки, в произвольном положении в направлении, ортогональном направлению движения объекта, который следует упаковывать, указанный объект может обвязываться параллельно направлению, по которому движется этот объект.
[0081] Поэтому объект, который следует упаковывать, может обвязываться параллельно направлению движения объекта, который следует упаковывать, в нескольких положениях в направлении, ортогональном к направлению движения объекта, который следует упаковывать, при этом обеспечивается плотная обвязка.
[0082] В соответствии с настоящим изобретением также при движении пары вертикальных направляющих ленту арок, располагающихся отдельно друг от друга из положения ожидания в положение соединения с этими горизонтальными направляющими ленту арками, установленными для обвязывания, при этом объект, который следует упаковывать, может обвязываться параллельно направлению движения объекта, который следует упаковывать, в нескольких произвольных положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать.
[0083] Поэтому в нескольких положениях в направлении, ортогональном направлению движения объекта, который следует упаковывать, этот объект может обвязываться параллельно направлению его движения, при этом можно получать более плотную обвязку.
[0084] Следует также отметить, что в соответствии с настоящим изобретением при применении цилиндра, рычажного механизма и шагового двигателя в качестве средства привода для изменения положения пары вертикальных направляющих ленту арок на ортогональное направлению движения объекта, который следует упаковывать, пара вертикальных направляющих ленту арок может перемещаться в положение ожидания и в положение соединения в направлении, ортогональном направлению движения объекта, который следует упаковывать, более устойчиво, обеспечивая аккуратное обвязывание.
[0085] Следует также отметить, что в соответствии с настоящим изобретением одной автоматической обвязочной упаковочной машиной объект, который следует упаковывать, может обвязываться параллельно направлению движения этого объекта, а другой автоматической обвязочной упаковочной машиной этот объект, который следует упаковывать, может обвязываться и пакетироваться в направлении, ортогональном направлению движения объекта на одной автоматической обвязочной упаковочной машине, при этом объект, который следует упаковывать, может обвязываться в перекрестном направлении.
[0086] Кроме того, даже если две автоматические обвязочные упаковочные машины устанавливаются рядом друг с другом, и при этом направление движения объекта, который следует упаковывать, представляет собой прямую линию, возможно осуществлять перекрестную обвязку, а одна автоматическая обвязочная упаковочная машина и другая автоматическая обвязочная упаковочная машина могут устанавливаться в прямую линию, а не под прямым углом, как ранее, что приводит к сокращению требующегося для установки пространства и, кроме того, упрощает всю конструкцию.
[0087] Следует также отметить, что в соответствии с настоящим изобретением, за счет того, что одна автоматическая обвязочная упаковочная машина для обвязывания параллельно направлению движения объекта, который следует упаковывать, относительно другой автоматической обвязочной упаковочной машины для обвязывания в направлении, ортогональном направлению движения объекта, который следует упаковывать, может устанавливаться вверху по движению или внизу по движению, возникает большая свобода в компоновке установки.
[0088] Следует также отметить, что в соответствии с настоящим изобретением не только одна автоматическая обвязочная упаковочная машина, но и другая автоматическая обвязочная упаковочная машина представляют собой одинаковые автоматические обвязочные упаковочные машины в соответствии с настоящим изобретением, и нет необходимости применять автоматическую обвязочную упаковочную машину отличающейся конструкции для осуществления упаковки, как в известных решениях, при этом становится более простой система управления.
Краткое описание чертежей
[0089]
Фиг.1 - вид в перспективе, иллюстрирующий состояние, при котором вертикальная направляющая ленту арка автоматической обвязочной упаковочной машины находится в положении ожидания.
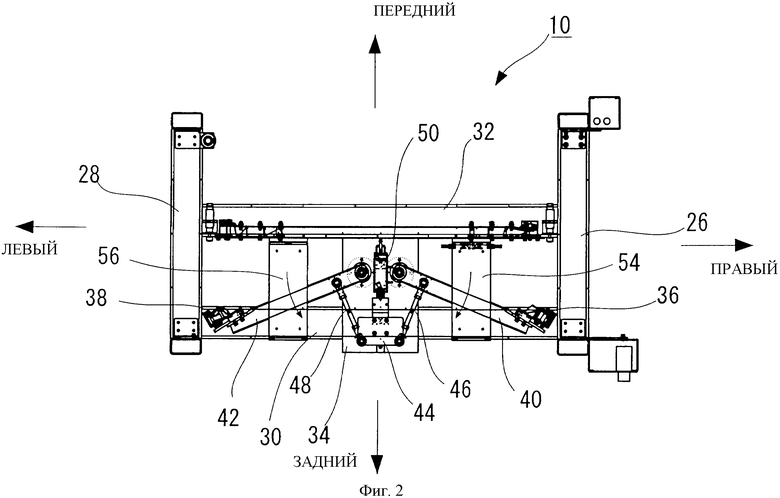
Фиг.2 - вид сзади в направлении А-А, показанном на Фиг.1.
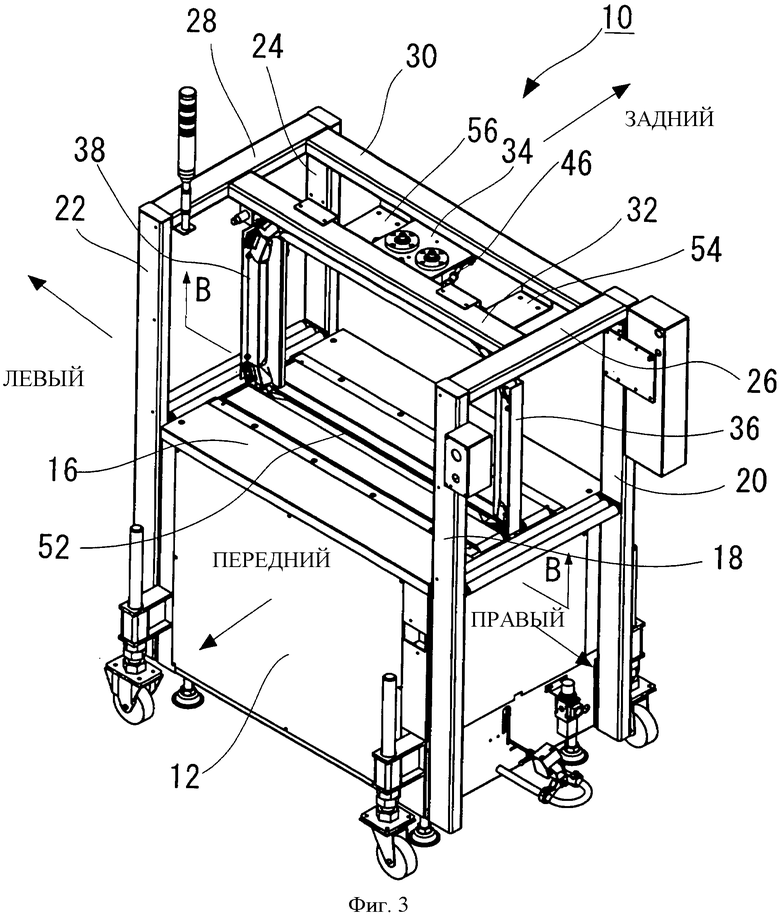
Фиг.3 - вид в перспективе, иллюстрирующий состояние, при котором автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением находится в соединенном положении.
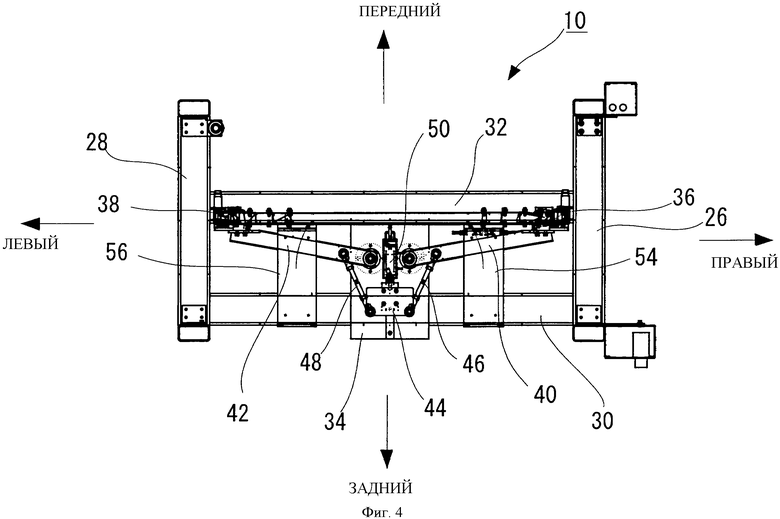
Фиг.4 - вид сзади в направлении В-В, показанном на Фиг.3.
Фиг.5 - вид в плане сверху, иллюстрирующий другое воплощение автоматической обвязочной упаковочной машины в соответствии с настоящим изобретением.
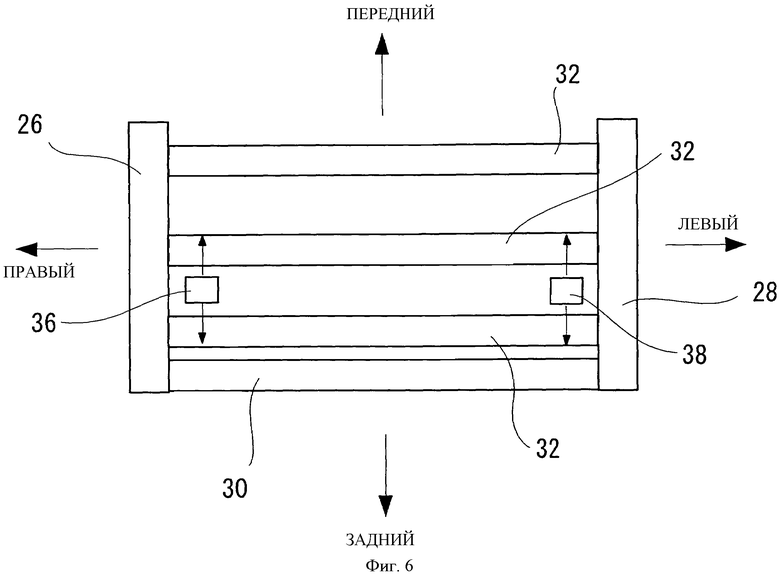
Фиг.6 - вид в плане сверху, иллюстрирующий другое воплощение автоматической обвязочной упаковочной машины в соответствии с настоящим изобретением.
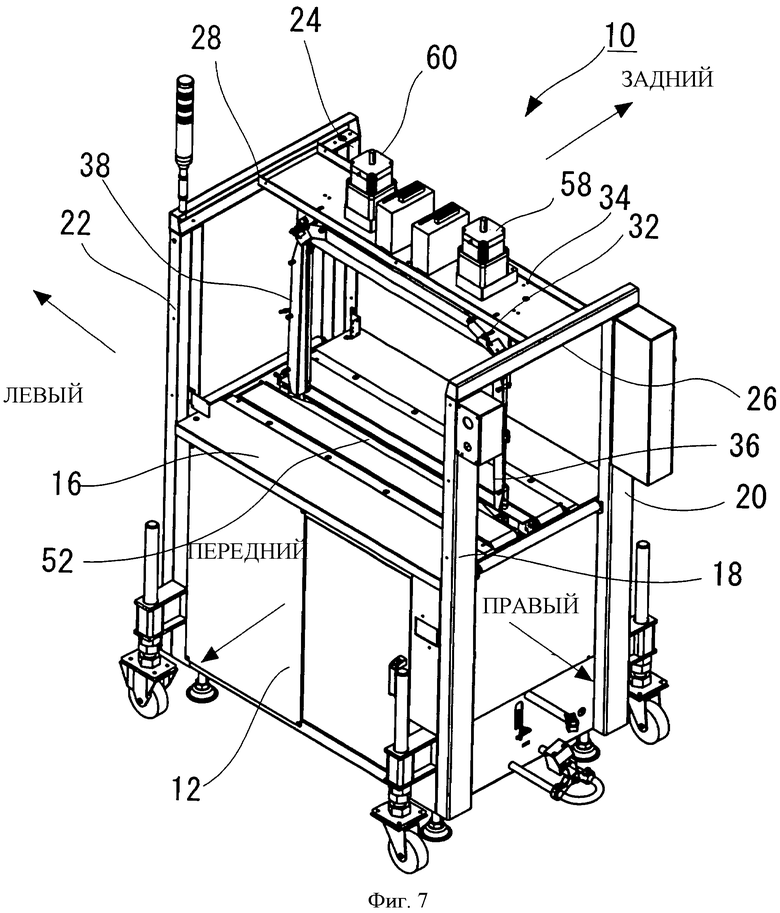
Фиг.7 - вид в перспективе, иллюстрирующий другое воплощение автоматической обвязочной упаковочной машины в соответствии с настоящим изобретением.
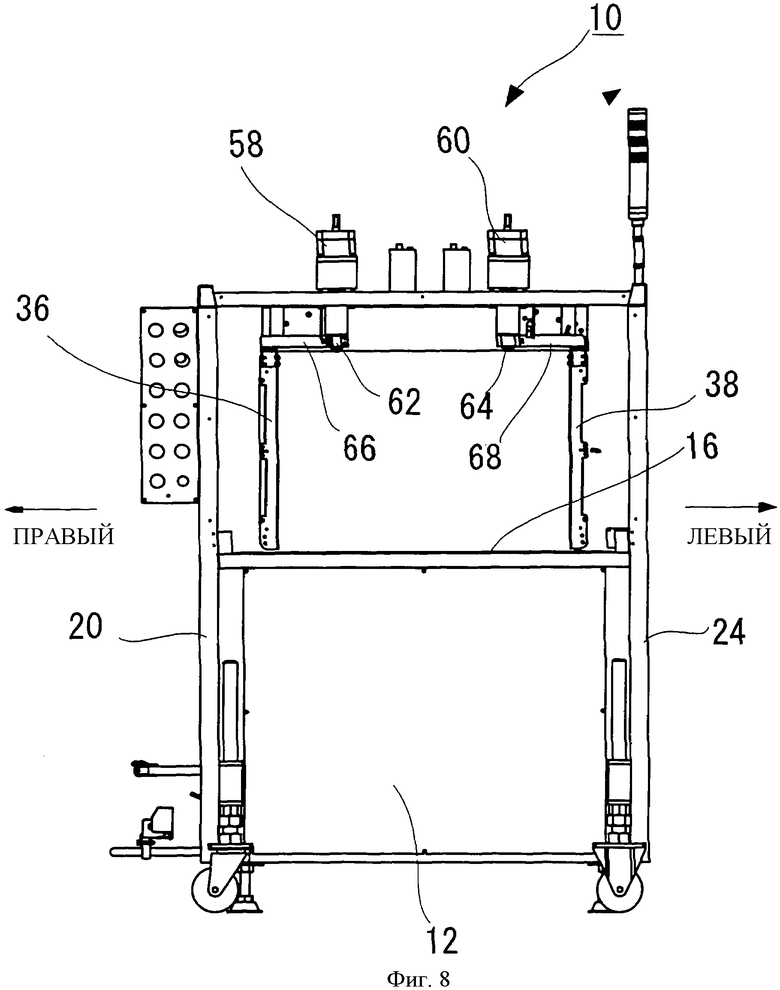
Фиг.8 - вид сзади автоматической обвязочной упаковочной машины в соответствии с Фиг.7.
Фиг.9 - вид в плане, иллюстрирующий воплощение автоматической обвязочной упаковочной системы 70, в которой используется автоматическая обвязочная упаковочная машина 10 в соответствии с настоящим изобретением.
Фиг.10 - вид в плане, иллюстрирующий другое воплощение автоматической обвязочной упаковочной системы 70, в которой используется автоматическая обвязочная упаковочная машина 10 в соответствии с настоящим изобретением.
Фиг.11 - вид в плане, иллюстрирующий другое воплощение автоматической обвязочной упаковочной системы 70, в которой используется автоматическая обвязочная упаковочная машина 10 в соответствии с настоящим изобретением.
Фиг.12 - вид в перспективе известной автоматической обвязочной упаковочной машины.
Фиг.13 - вид в плане, иллюстрирующий расположение конвейерной линии для перекрестной обвязки объекта, который следует упаковывать, используя известные автоматические обвязочные упаковочные машины.
Фиг.14 - вид в плане, поясняющий невозможность расположения известных автоматических обвязочных упаковочных машин в одну линию для перекрестной обвязки объекта, который следует упаковывать.
Фиг.15 - частичный увеличенный вид сбоку известной автоматической обвязочной упаковочной машины.
Фиг.16 - вид в плане, иллюстрирующий расположение на конвейерной линии для перекрестной обвязки объекта, который следует упаковывать, с применением известной автоматической обвязочной упаковочной машины и автоматических обвязочных упаковочных машин.
Фиг.17 - частичный увеличенный вид в перспективе известной автоматической обвязочной упаковочной машины.
Фиг.18 - вид спереди для пояснения работы известной автоматической обвязочной упаковочной машины.
Пояснение обозначений позиций буквами или цифрами
[0090]
Преимущественный режим осуществления изобретения
[0091] Воплощение (пример) настоящего изобретения описывается далее в деталях со ссылками на приложенные рисунки.
[0092] На Фиг.1 представлен вид в перспективе, иллюстрирующий состояние, при котором вертикальная направляющая ленту арка автоматической обвязочной упаковочной машины в соответствии с настоящим изобретением находится в положении ожидания, а на Фиг.2 - вид сзади в направлении А-А, показанном на Фиг.1. Фиг.3 является видом в перспективе, иллюстрирующим состояние, при котором автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением находится в соединенном положении, и Фиг.4 является видом сзади в направлении В-В, показанном на Фиг.3.
[0093] На Фиг.1 позицией 10 обозначена вся автоматическая обвязочная упаковочная машина в соответствии с настоящим изобретением.
[0094] Как показано на Фиг.1, автоматическая обвязочная упаковочная машина 10 имеет корпус 12 упаковочной машины, устанавливающийся, например, на поверхности пола цеха, и на верхней поверхности корпуса 12 упаковочной машины монтируется стол 16 с верхней поверхностью, представляющий собой рабочее основание для укладки объекта, который следует упаковывать.
[0095] Таким образом, корпус 12 упаковочной машины имеет коробчатую форму и содержит ленту (не показана) или подобный материал, а верхняя поверхность корпуса 12 упаковочной машины, представленная верхней поверхностью стола 16, на которой объект, который следует упаковывать, движется справа и слева на Фиг.1.
[0096] На Фиг.1 показано также, что нижние части рам 18, 20, 22, 24 монтируются в четырех углах, переднем, заднем, правом и левом, корпуса 12 упаковочной машины.
[0097] Кроме того, между верхним концом правосторонней передней рамы 18 и верхним концом правосторонней задней рамы 20 устанавливается правосторонняя соединительная планка 26. Подобным образом между верхним концом левосторонней передней рамы 22 и верхним концом левосторонней задней рамы 24 устанавливается правосторонняя соединительная планка 28.
[0098] Между задним концом правосторонней соединительной планки 26 и задним концом левосторонней соединительной планки 28 устанавливается задняя соединительная планка 30.
[0099] А между правосторонней соединительной планкой 26 и левосторонней соединительной планкой 28 над столом 16 с верхней поверхностью устанавливается горизонтальная направляющая ленту арка 32, располагающаяся в направлении, параллельном направлению движения объекта, который следует упаковывать (в левом и правом направлении на Фиг.1).
[0100] Между средней продольной частью задней соединительной планки 30 и средней продольной частью горизонтальной направляющей ленту арки 32 монтируется прямоугольная опорная плита 34.
[0101] Над столом 16 с верхней поверхностью в направлении, параллельном направлению движения объекта, который следует упаковывать, устанавливается пара вертикальных направляющих ленту арок 36, 38, располагающихся отдельно друг от друга.
[0102] Горизонтальная направляющая ленту арка 32 также устанавливается над вертикальными направляющими ленту арками 36, 38 параллельно направлению движения объекта, который следует упаковывать.
[0103] Как показано на Фиг.2 и 4, на опорной плате 34 левый конец правосторонней поворотной планки 40 соединяется шарнирно с возможностью вращения, а на правом конце правосторонней поворотной планки 40 крепится верхний конец правосторонней вертикальной направляющей ленту арки 36.
[0104] Подобным образом на опорной плате 34 правый конец левосторонней поворотной планки 42 соединяется шарнирно с возможностью вращения, а на левом конце левосторонней поворотной планки 42 крепится верхний конец левосторонней вертикальной направляющей ленту арки 38.
[0105] Правосторонняя вертикальная направляющая ленту арка 36 подвешивается на правосторонней поворотной планке 40 и проходит до положения вблизи стола 16 с верхней поверхность корпуса 12 упаковочной машин с небольшим зазором. Подобным образом левосторонняя вертикальная направляющая ленту арка 38 подвешивается на левосторонней поворотной планке 42 и проходит до положения вблизи стола 16 с верхней поверхностью корпуса 12 упаковочной машин с небольшим зазором.
[0106] При такой конструкции вертикальные направляющие ленту арки 36, 38 располагаются независимо друг от друга в направлении, параллельном направлению движения объекта, который следует упаковывать, и одновременно могут перемещать и устанавливаться в направлении, ортогональном направлению движения объекта, который следует упаковывать (направление вперед и назад на Фиг.1) (см. Фиг.1-4).
[0107] Как показано на Фиг.2 и 4, на нижней стороне опорной платы 34 устанавливается скользящая плата 44, которая может скользить в направлениях вперед и назад. Между скользящей платой 44 и правосторонней поворотной планкой 40 устанавливается шарнирно правостороннее соединение 46. Таким же образом между скользящей платой 44 и левосторонней поворотной планкой 42 устанавливается шарнирно левостороннее соединение 48.
[0108] На нижней стороне опорной платы 34 крепится цилиндрическое устройство 50, представляющее собой приводной механизм, а дальний конец поршня этого цилиндрического устройства 50 крепится к скользящей плате 44.
[0109] При этом в автоматической обвязочной упаковочной машине 10, когда требуется вносить или выносить объект, который следует упаковывать, как показано на Фиг.2, достаточно просто выдвинуть поршень цилиндрического устройства 50. Таким образом, в данном случае, когда скользящая плата 44 скользит назад, в то же время правосторонняя поворотная планка 40 и левосторонняя поворотная планка 42 поворачиваются в направлении стрелки на Фиг.2.
[0110] В результате правосторонняя вертикальная направляющая ленту арка 36, соединенная с правосторонней поворотной планкой 40, движется в положение ожидания, находящееся рядом с правосторонней задней рамой 20, а левосторонняя вертикальная направляющая ленту арка 38, соединенная с левосторонней поворотной планкой 42, движется в положение ожидания, находящееся рядом с левосторонней задней рамой 24.
[0111] Поэтому в автоматической обвязочной упаковочной машине 10, когда объект, который следует упаковывать, должен вноситься или выноситься, вертикальные направляющие ленту арки 36, 38 не находятся на пути внесения или вынесения объекта, который следует упаковывать.
[0112] С другой стороны, в автоматической обвязочной упаковочной машине 10, в состоянии, когда объект, который следует упаковывать, уже внесен и находится в положении упаковки, необходимо только втянуть поршень цилиндрического устройства 50. В этом случае скользящая пластина 44 движется вперед и правосторонняя поворотная планка 40 и левосторонняя поворотная планка 42 поворачиваются в направлении стрелки, как показано на Фиг.4.
[0113] В результате правосторонняя вертикальная направляющая ленту арка 36, соединенная с правосторонней поворотной планкой 40, движется в положение соединения с горизонтальной направляющей ленту аркой 32, и узкая выемка 52 образуется на столе 16 с верхней поверхностью корпуса 12 упаковочной машины.
[0114] Подобным образом левосторонняя вертикальная направляющая ленту арка 38, соединенная с левосторонней поворотной планкой 42, движется в положение соединения с горизонтальной направляющей ленту аркой 32, и узкая выемка 52 образуется на столе 16 с верхней поверхностью корпуса 12 упаковочной машины.
[0115] В результате пара, состоящая из правосторонней вертикальной направляющей ленту арки 36 и левосторонней вертикальной направляющей ленту арки 38 и горизонтальная направляющая ленту арка 32 формируют U-образную направляющую ленту арку, внутри которой образуется проход для ленты, и при подаче ленты так, чтобы она двигалась через этот проход для ленты, лента будет устойчиво подаваться в направляющую ленту арку.
[0116] В этом состоянии выполняется несколько упаковочных операций, включая натяжение ленты, соединение ленты и, в дополнение к этому, сварка ленты, которые осуществляются практически одновременно с обрезкой, причем все операции осуществляются автоматически, при этом объект, который следует упаковывать, может обвязываться в направлении, параллельном направлению движения самого объекта, который следует упаковывать.
[0117] Между задней соединительной планкой 30 и горизонтальной направляющей ленту аркой 32 устанавливаются укрепляющие накладки 54, 56 отдельно на правой и левой сторонах.
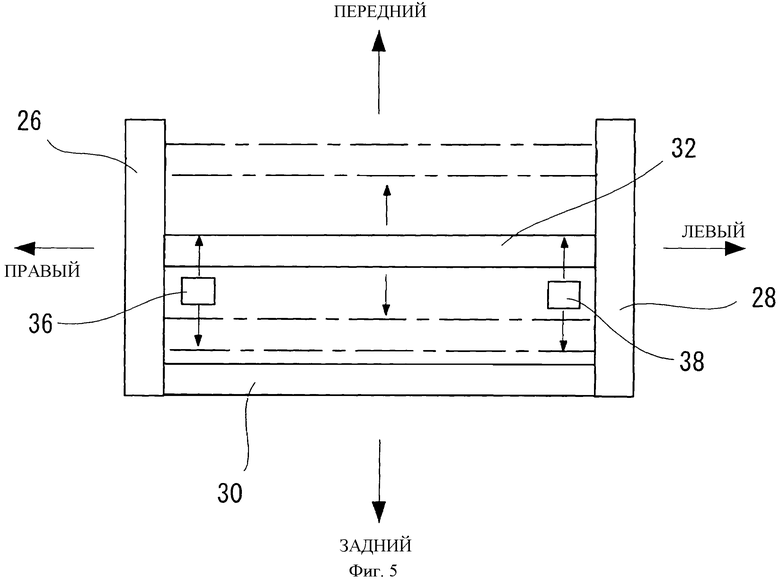
[0118] В рассмотренном выше воплощении настоящего изобретения горизонтальная направляющая ленту арка 32 устанавливается в фиксированном состоянии над столом 16 с верхней поверхностью, но, как показано стрелкой на Фиг.5, горизонтальная направляющая ленту арка 32 может устанавливаться подвижно в направлении, ортогональном направлению движения объекта, который следует упаковывать, над столом 16 с верхней поверхностью.
[0119] В такой конструкции при движении горизонтальной направляющей ленту арки 32 над столом 16 с верхней поверхностью в произвольное положение в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, и при движении пары вертикальных направляющих ленту арок 36, 38, установленных отдельно друг от друга, из положения ожидания в положение соединения с горизонтальной направляющей ленту аркой 32 для осуществления обвязки, указанный объект может обвязываться параллельно направлению, по которому движется этот объект.
[0120] Поэтому в нескольких положениях в направлении, ортогональном направлению движения объекта, который следует упаковывать, обвязывание может проводиться параллельно направлению движения объекта, который следует упаковывать, при этом обеспечивается плотная обвязка.
[0121] Кроме того, как показано на Фиг.6, горизонтальная направляющая ленту арка 32 может устанавливаться в нескольких положениях в направлении, ортогональном направлению движения объекта, который следует упаковывать.
[0122] В такой конфигурации при движении вертикальных направляющих ленту арок 36, 38, располагающихся отдельно друг от друга, из положения ожидания в положение соединения с горизонтальными направляющими ленту арками 32, установленными в нескольких положениях для осуществления соответствующей обвязки в нескольких произвольных положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, при этом указанный объект может обвязываться в направлении, параллельном направлению движения этого объекта, который следует упаковывать.
[0123] В связи с этим в нескольких положениях в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, указанный объект может обвязываться в направлении, параллельном направлению движения этого объекта, который следует упаковывать, при этом обеспечивается плотная обвязка.
[0124] Кроме того, указанное выше воплощение изобретения выполняется таким, что положения пары вертикальных направляющих ленту арок 36, 38 изменяются при выдвижении поршня цилиндрического устройства 50 в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, с помощью рычажного механизма, соединенного с цилиндрическим устройством 50 и парой вертикальных направляющих ленту арок 36, 38. Однако, как можно видеть на Фиг.7 и 8, может использоваться такая конструкция, в которой в качестве средства привода применяются шаговые двигатели 58, 60 соответственно. При этом пара вертикальных направляющих ленту арок перемещается в положение, ортогональное по отношению к направлению движения объекта, который следует упаковывать.
[0125] Благодаря применению шаговых двигателей 58, 60 в качестве средства привода для изменения положения пары вертикальных направляющих ленту арок 36 и 38 в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, пара вертикальных направляющих ленту арок 36 и 38 может перемещаться в положение ожидания и в положение соединения в направлении, ортогональном по отношению к направлению движения объекта, который следует упаковывать, более устойчиво, при этом обеспечивая более аккуратную обвязку.
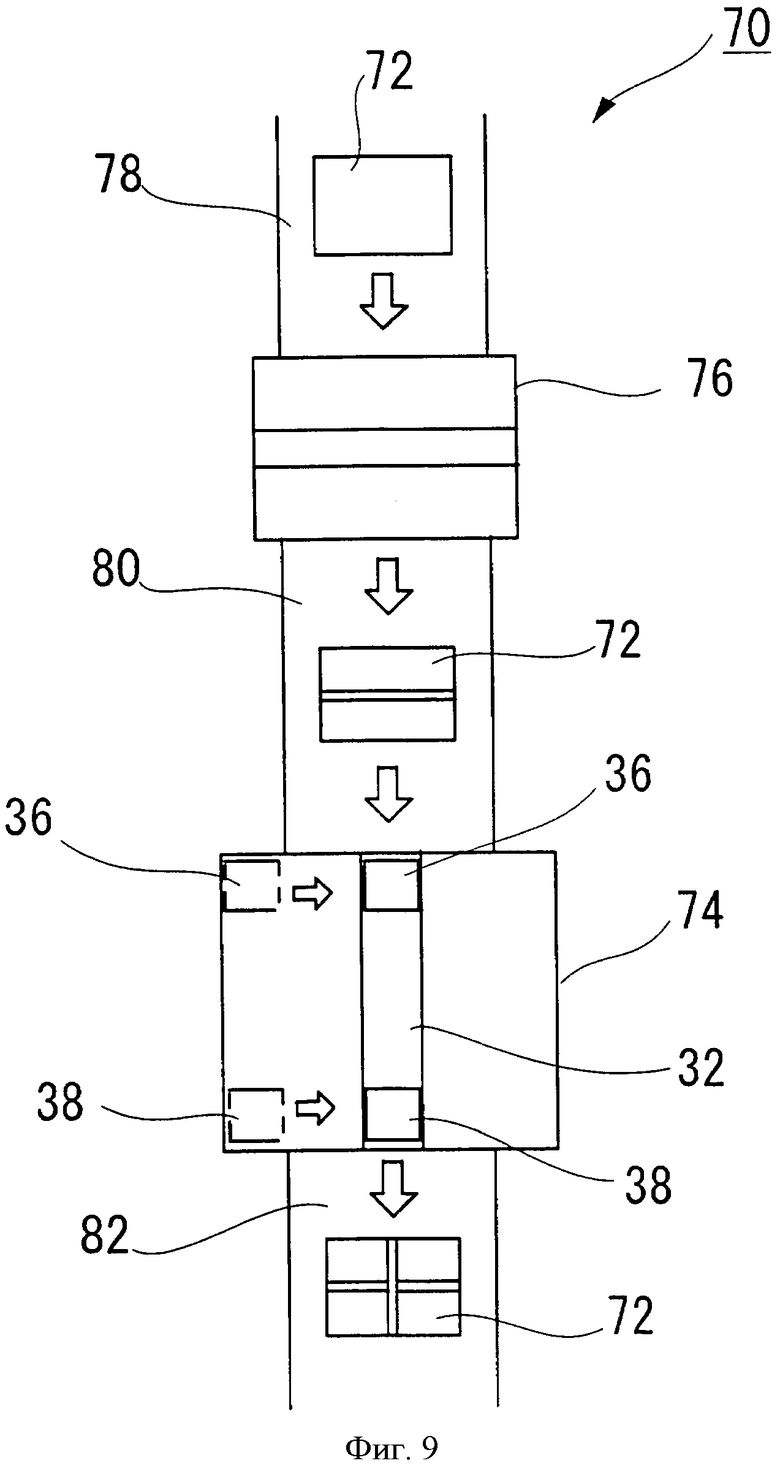
[0126] На Фиг.9 представлен схематический вид в плане, иллюстрирующий воплощение автоматической обвязочной упаковочной системы 70, в которой используется автоматическая обвязочная упаковочная машина 10 в соответствии с настоящим изобретением.
[0127] Как показано на Фиг.9, в автоматической обвязочной упаковочной системе 70 устанавливаются две автоматические обвязочные упаковочные машины рядом друг с другом, при этом направление движения объекта 72, который следует упаковывать, становится прямой линией.
[0128] Таким образом, в автоматической обвязочной упаковочной системе 70 этого воплощения одна автоматическая обвязочная упаковочная машина 74 представляет собой автоматическую обвязочную упаковочную машину 10 в соответствии с настоящим изобретением для обвязывания объекта 72, который следует упаковывать, параллельно направлению движения этого объекта 72, который следует упаковывать, причем эта машина устанавливается на нижней стороне по движению.
[0129] На верхней стороне по движению относительно автоматической обвязочной упаковочной машины 74 устанавливается другая автоматическая обвязочная упаковочная машина 76, имеющая конфигурацию, описанную в уровне техники и показанную на Фиг.12, которая применяется для обвязывания объекта 72, который следует упаковывать, в направлении, ортогональном направлению движения объекта 72, который следует упаковывать.
[0130] Объект 72, который следует упаковывать, вносится в другую автоматическую обвязочную упаковочную машину 76 первой конвейерной линией 78, и на другой автоматической обвязочной упаковочной машине 76 осуществляется обвязка объекта 72, который следует упаковывать, в направлении, ортогональном направлению движения объекта 72, который следует упаковывать, на автоматической обвязочной упаковочной машине 74 (см. объект 72, который следует упаковывать, на второй конвейерной линии 80 на Фиг.9), и вносится на автоматическую обвязочную упаковочную машину 74 второй конвейерной линией 80.
[0131] Объект 72, который следует упаковывать, перенесенный на автоматическую обвязочную упаковочную машину 74, обвязывается на ней перекрестно и одновременно параллельно направлению движения объекта 72, который следует упаковывать (см. объект 72, который следует упаковывать, на третьей конвейерной линии 82 на Фиг.9), и выносится третьей конвейерной линией 82.
[0132] Таким образом, в автоматической обвязочной упаковочной системе 70 этого воплощения две автоматические обвязочные упаковочные машины 74, 76 устанавливаются рядом, при этом направление движения объекта 72, который следует упаковывать, становится прямой линией, включающей первую конвейерную линию 78, вторую конвейерную линию 80 и третью конвейерную линию 82.
[0133] В автоматической обвязочной упаковочной системе 70 указанной выше конструкции, когда объект 72, который следует упаковывать, должен обвязываться перекрестно с помощью ленты, сначала объект 72, который следует упаковывать, вносится в другую автоматическую обвязочную упаковочную машину 76 первой конвейерной линией 78, и на этой автоматической обвязочной упаковочной машине 76 объект 72, который следует упаковывать, обвязывается в направлении, ортогональном направлению движения объекта 72, который следует упаковывать, на автоматической обвязочной упаковочной машине 74 (правое и левое направления на Фиг.9) (см. объект 72, который следует упаковывать, на второй конвейерной линии 80 на Фиг.9).
[0134] Затем при выдвижении поршня цилиндрическим устройством 50 вертикальные направляющие ленту арки 36, 38 автоматической обвязочной упаковочной машины 74 прежде всего перемещаются в положение ожидания (положение показано на Фиг.9 пунктирной линией).
[0135] Второй конвейерной линией 80 объект 72, который следует упаковывать, вносится в автоматическую обвязочную упаковочную машину 74 и перемещается в положение для упаковки (центральное положение в направлении движения на конвейерной линии в автоматической обвязочной упаковочной машине 74).
[0136] В этом положении при втягивании поршня цилиндрическим устройством 50 и движении вертикальных направляющих ленту арок 36, 38 в положение соединения, после подачи ленты на пару вертикальных направляющих ленту арок 36, 38 и горизонтальную направляющую ленту арку 32 в этом состоянии, объект 72, который следует упаковывать, обвязывается в направлении, параллельном направлению движения объекта 72, который следует упаковывать, на автоматической обвязочной упаковочной машине 74 (направления вперед и назад на Фиг.9) для обвязывания в перекрестном положении (см. объект 72, который следует упаковывать, на третьей конвейерной линии 82 на Фиг.9).
[0137] В такой конфигурации одной автоматической обвязочной упаковочной машиной объект, который следует упаковывать, может обвязываться параллельно направлению движения этого объекта, а другой автоматической обвязочной упаковочной машиной этот объект, который следует упаковывать, может обвязываться в направлении, ортогональном направлению движения объекта на автоматической обвязочной упаковочной машине 74 и пакетироваться, при этом указанный объект может обвязываться в перекрестном направлении.
[0138] Кроме того, даже если две автоматические обвязочные упаковочные машины 74, 76 устанавливаются рядом друг с другом, и при этом направление движения объекта, который следует упаковывать, представляет собой прямую линию, возможно осуществлять перекрестную обвязку, а одна автоматическая обвязочная упаковочная машина и другая автоматическая обвязочная упаковочная машина могут устанавливаться в прямую линию, а не под прямым углом, как ранее, что приводит к сокращению требующегося для установки пространства и упрощает всю конструкцию.
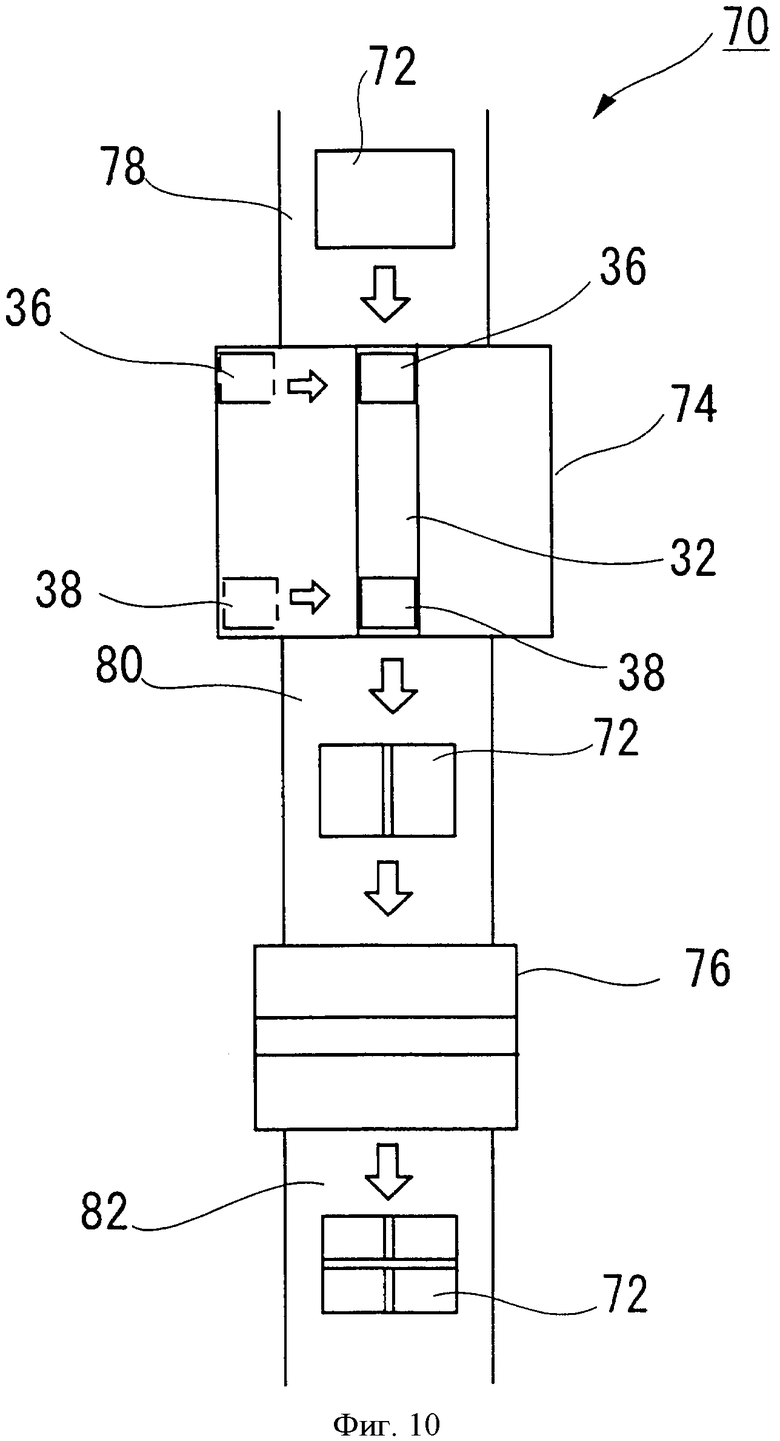
[0139] В этом воплощении одна автоматическая обвязочная упаковочная машина 74 для обвязывания параллельно направлению движения объекта, который следует упаковывать, устанавливается на стороне вниз по движению, а другая автоматическая обвязочная упаковочная машина 76 для обвязывания в направлении, ортогональном направлению движения объекта 72, который следует упаковывать, устанавливается на стороне вверх по движению относительно автоматической обвязочной упаковочной машины 74 в конфигурации, которая упоминается в уровне техники и показана на Фиг.12, но в обратном порядке, т.е. автоматическая обвязочная упаковочная машина 74 может устанавливаться на стороне вверх по движению, а другая автоматическая обвязочная упаковочная машина 76 - на стороне вниз по движению по отношению к автоматической обвязочной упаковочной машине 74, как показано на Фиг.10.
[0140] При такой конфигурации одна автоматическая обвязочная упаковочная машина 74 для обвязывания параллельно направлению движения объекта, который следует упаковывать, и другая автоматическая обвязочная упаковочная машина 76 для обвязывания в направлении, ортогональном направлению движения объекта 72, который следует упаковывать, могут произвольно устанавливаться на стороне вверх по движению или вниз по движению, при этом достигается большая свобода в выборе конструкции.
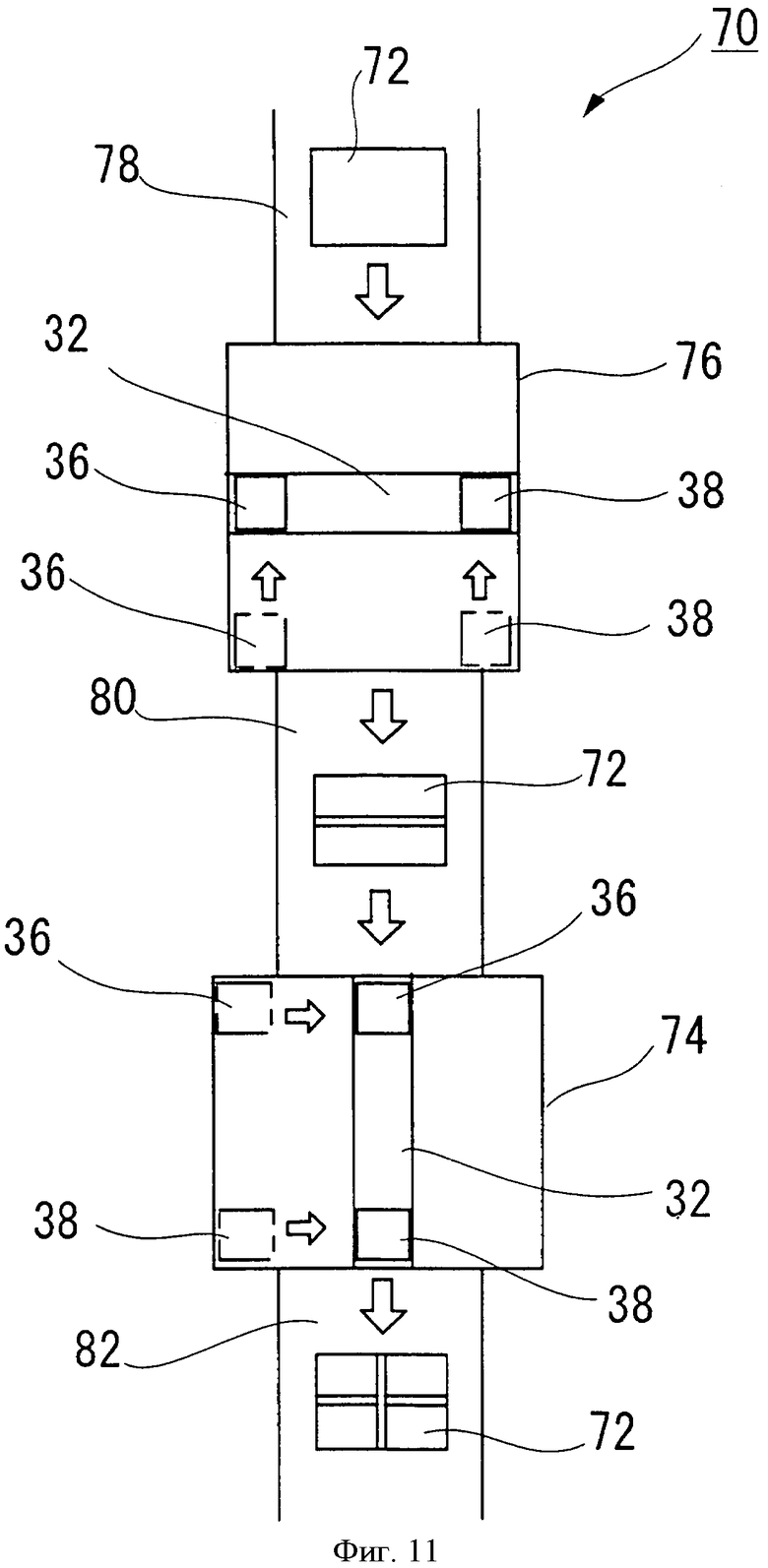
[0141] Следует также указать, что, как показано на Фиг.11, другая автоматическая обвязочная упаковочная машина 76 может представлять собой автоматическую обвязочную упаковочную машину 10 в соответствии с настоящим изобретением.
[0142] В этом случае, как показано на Фиг.11, когда другая автоматическая обвязочная упаковочная машина 76 представляет собой автоматическую обвязочную упаковочную машину 10 в соответствии с настоящим изобретением, горизонтальная направляющая ленту арка 32 может устанавливаться параллельно направлению, ортогональному направлению движения объекта 72, который следует упаковывать, при этом направления вперед и назад на Фиг.1 становятся направлением транспортировки объекта 72, который следует упаковывать, в автоматической обвязочной упаковочной машине 10.
[0143] В такой конфигурации, в которой не только одна автоматическая обвязочная упаковочная машина 74, но также и другая автоматическая обвязочная упаковочная машина 76 представляет собой автоматическую обвязочную упаковочную машину 10 в соответствии с настоящим изобретением, нет необходимости осуществлять упаковку, устанавливая автоматическую обвязочную упаковочную машину другой конструкции, как раньше, и ее система управления упрощается, а с нею упрощается сама система управления установки.
Промышленная применимость
[0144] Преимущественные воплощения настоящего изобретения были описаны выше, однако настоящее изобретение не ограничивается ими. Например, в указанном воплощении обвязка объекта, который следует упаковывать, осуществляется лентой, но для нее могут, например, использоваться другие обвязывающие материалы. Кроме того, в приведенных выше воплощениях рассматривается автоматическая обвязочная упаковочная система, в которой автоматическая обвязочная упаковочная машина располагается в горизонтальной плоскости, но такая машина может устанавливаться не только в этой плоскости, но и в вертикальном положении или в трехмерной конфигурации. Возможны различные изменения настоящего изобретения в его рамках, не изменяя при этом сущности настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ УПАКОВОЧНАЯ ЛИНИЯ ДЛЯ УПАКОВКИ ПРОФИЛЕЙ И РОТОР | 2014 |
|
RU2604757C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2008 |
|
RU2405722C2 |
| ОБВЯЗОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2532270C2 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ИЗДЕЛИЙ НА ПАЛЛЕТЕ | 2022 |
|
RU2793019C1 |
| ОБВЯЗОЧНЫЕ ЛЕНТЫ ИЗ ВОЗОБНОВЛЯЕМОГО СЫРЬЯ | 2012 |
|
RU2584516C2 |
| Агрегат для упаковки пакетов листов | 1978 |
|
SU753718A1 |
| РАМНАЯ ПРОВОДКА ОБВЯЗОЧНОЙ МАШИНЫ | 2001 |
|
RU2205141C2 |
| Устройство для упаковывания тары обвязочной лентой | 1987 |
|
SU1530528A1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2797819C2 |
| ОБВЯЗЫВАЮЩИЙ АВТОМАТ ДЛЯ ОБВЯЗКИ УПАКОВОЧНЫХ ЕДИНИЦ, В ЧАСТНОСТИ, СМОТАННЫХ В РУЛОНЫ МЕТАЛЛИЧЕСКИХ ЛЕНТ | 2010 |
|
RU2539502C2 |
Упаковочная машина содержит корпус (12), имеющий стол (16) с верхней поверхностью, на которую подается объект, который следует упаковывать, пару вертикальных направляющих ленту арок (36, 38), устанавливающихся отдельно друг от друга над столом с верхней поверхностью в направлении, параллельном направлению движения объекта, который следует упаковывать, и горизонтальную направляющую ленту арку (32), устанавливающуюся над столом с верхней поверхностью в направлении, параллельном направлению движения объекта, который следует упаковывать. Пара вертикальных направляющих ленту арок выполняется с возможностью перемещаться между положением ожидания, при котором они отделены от горизонтальной направляющей ленту арки, и положением соединения, при котором они соединяются с горизонтальной направляющей ленту аркой в направлении, ортогональном направлению движения объекта, который следует упаковывать. При использовании упаковочной машины в составе упаковочной системы обеспечивается возможность установки конвейерной линии в одном направлении. Упрощается конструкция машины, обеспечивается устойчивая подача ленты на направляющую арку. 2 н. и 9 з.п. ф-лы, 18 ил.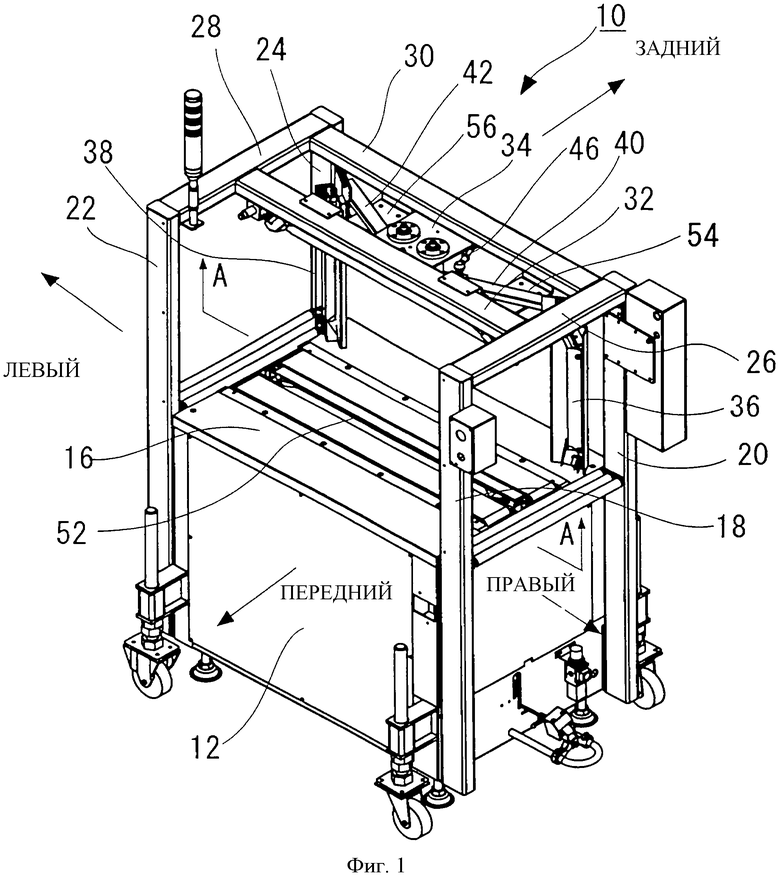
1. Автоматическая обвязочная упаковочная машина, содержащая:
корпус упаковочной машины, имеющий стол с верхней поверхностью, на которую подается объект, который следует упаковывать;
пару вертикальных направляющих ленту арок, располагающихся над столом с верхней поверхностью отдельно друг от друга в направлении, параллельном направлению движения объекта, который следует упаковывать; и
горизонтальную направляющую ленту арку, располагающуюся над столом с верхней поверхностью в направлении, параллельном направлению движения объекта, который следует упаковывать;
причем
пара вертикальных направляющих ленту арок выполняется с возможностью перемещения в направлении, ортогональном направлению движения объекта, который следует упаковывать, между положением ожидания, отделенном от горизонтальной направляющей ленту арки, и положением соединения с горизонтальной направляющей ленту аркой.
2. Автоматическая обвязочная упаковочная машина по п.1, в которой горизонтальная направляющая ленту арка устанавливается на верхней стороне от вертикальной направляющей ленту арки.
3. Автоматическая обвязочная упаковочная машина по п.2, в которой горизонтальная направляющая ленту арка фиксируется в положении над столом с верхней поверхностью.
4. Автоматическая обвязочная упаковочная машина по п.1, в которой горизонтальная направляющая ленту арка выполняется с возможностью изменять свое положение в направлении, ортогональном направлению движения объекта, который следует упаковывать, над столом с верхней поверхностью.
5. Автоматическая обвязочная упаковочная машина по п.1, в которой горизонтальная направляющая ленту арка устанавливается в нескольких положениях в направлении, ортогональном направлению движения объекта, который следует упаковывать.
6. Автоматическая обвязочная упаковочная машина по п.1, дополнительно содержащая приводное средство для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном направлению движения объекта, который следует упаковывать, причем приводное средства выполнено с возможностью изменять положения пары вертикальных направляющих ленту арок в направлении, ортогональном направлению движения объекта, который следует упаковывать, путем выдвижения цилиндра через рычажный механизм, соединяющий цилиндр с парой вертикальных направляющих ленту арок.
7. Автоматическая обвязочная упаковочная машина по п.1, дополнительно содержащая приводное средство для изменения положения пары вертикальных направляющих ленту арок в направлении, ортогональном направлению движения объекта, который следует упаковывать, причем приводное средство выполнено с возможностью изменять положения пары вертикальных направляющих ленту арок в направлении, ортогональном направлению движения объекта, который следует упаковывать, с помощью шагового двигателя.
8. Автоматическая обвязочная упаковочная система для перекрестного обвязывания объекта, который следует упаковывать, в которой устанавливаются две автоматические обвязочные упаковочные машины рядом друг с другом, при этом направление движения объекта, который следует упаковывать, является прямой линией;
одна автоматическая обвязочная упаковочная машина представляет собой автоматическую обвязочную упаковочную машину по любому из пп.1-7; и другая автоматическая обвязочная упаковочная машина представляет собой автоматическую обвязочную упаковочную машину, обвязывающую объект, который следует упаковывать, в направлении, ортогональном направлению движения объекта, который следует упаковывать, на одной автоматической обвязочной упаковочной машине.
9. Автоматическая обвязочная упаковочная система по п.8, в которой
одна автоматическая обвязочная упаковочная машина устанавливается на верхней по движению стороне конвейерной линии для транспортировки объекта, который следует упаковывать; и
другая автоматическая обвязочная упаковочная машина устанавливается на нижней по движению стороне конвейерной линии для транспортировки объекта, который следует упаковывать.
10. Автоматическая обвязочная упаковочная система по п.8, в которой
одна автоматическая обвязочная упаковочная машина устанавливается на нижней по движению стороне конвейерной линии для транспортировки объекта, который следует упаковывать; и
другая автоматическая обвязочная упаковочная машина устанавливается на верхней по движению стороне конвейерной линии для транспортировки объекта, который следует упаковывать.
11. Автоматическая обвязочная упаковочная система по любому из пп.8-10, в которой другая автоматическая обвязочная упаковочная машина представляет собой автоматическую обвязочную упаковочную машину по любому из пп.1-7.
| Устройство для обвязки пакета изделий | 1985 |
|
SU1421621A1 |
| EP 1489009 A1, 22.12.2004 | |||
| JP 2006290431 A, 26.10.2006. | |||

