Настоящее изобретение относится к способу управления режимом работы гибридного приводного агрегата для транспортных средств, в частности скутеров, и к гибридному приводному агрегату, использующему указанный способ.
Как известно, уже существуют дорожные транспортные средства, в частности моторные транспортные средства, использующие гибридные приводные агрегаты, т.е. транспортные средства, в которых двигатель внутреннего сгорания и электрический двигатель используются в комбинации друг с другом.
Известные гибридные технические решения допускают альтернативное или комбинированное использование двух движущих систем: согласно первой известной комбинированной конфигурации, называемой «гибридная последовательная» конфигурация, двигатель внутреннего сгорания выполняет единственную функцию приведения в действие генератора электрического тока, который заряжает аккумуляторные батареи, питающие электрический двигатель; поступательное движение, поэтому, осуществляется исключительно электрическим двигателем.
Это решение обеспечивает преимущество значительного уменьшения расходов, так как двигатель внутреннего сгорания должен только развивать среднюю мощность и может, следовательно, функционировать при постоянных и оптимизированных условиях.
Во второй конфигурации, известной как «гибридная параллельная» конфигурация, как двигатель внутреннего сгорания, так и электрические двигатели присоединены к ведущим колесам через специальные передаточные кинематические механизмы.
Известные гибридные приводные агрегаты имеют недостаток, состоящий в том, что они имеют сложные конструкции, которые дорого стоят и вызывают много затруднений, при том, что существует только немного случаев использования этого типа гибридной системы на моторных транспортных средствах, имеющих уменьшенные размеры, таких как скутеры.
В частности, заявка на патент Италии №ТO2002А001088 описывает гибридный приводной агрегат для скутеров, который использует электрическую машину, коаксиальную с центробежной муфтой сцепления блока трансмиссии, расположенной между приводным валом двигателя внутреннего сгорания и валом трансмиссии. В этом случае ротор электрической машины выполнен заодно с конусом сцепления.
Известный гибридный приводной агрегат для скутеров работает в соответствии со способом, который включает следующие рабочие режимы:
«тепловой», в котором поступательное движение обеспечивается исключительно двигателем внутреннего сгорания;
«электрический», в котором поступательное движение обеспечивается исключительно электрической машиной;
«гибридный параллельный», в котором двигатель внутреннего сгорания и электрический двигатель дают свой вклад в обеспечение движущей мощности;
и
«гибридный последовательный», в котором двигатель внутреннего сгорания используется исключительно для приведения в действие электрического генератора для зарядки аккумуляторных батарей, в то время как крутящий момент к ведущему колесу подается только электрической машиной.
Комбинированные рабочие режимы, известные сейчас для использования гибридного приводного агрегата для скутеров, не могут оптимизировать энергетические затраты транспортного средства и гарантировать уровень зарядки аккумуляторных батарей до заранее заданного значения. Они только предусматривают, в сущности, возможность подачи моментов обоих двигателей к приводному колесу или для зарядки аккумуляторных батарей посредством двигателя внутреннего сгорания, в то время как электрический двигатель подает требуемый крутящий момент.
В этом последнем случае также необходимо использование специального генератора тока, так как электрическая машина используется в качестве двигателя и, следовательно, нельзя использовать ее свойство обратимости.
Что предлагает предпринять настоящее изобретение, так это устранить недостатки, описанные выше, в известных способах управления режимами функционирования гибридных приводных агрегатов, предлагая способ, который способен гарантировать высокие функциональные качества в терминах оптимизации управления энергией.
В рамках этой задачи цель настоящего изобретения состоит в том, чтобы обеспечить способ управления рабочими режимами гибридных приводных агрегатов, способный управлять уровнем зарядки аккумуляторных батарей во время работы в комбинированном режиме, чтобы поддерживать их на заранее заданном уровне.
Еще одной целью настоящего изобретения является гибридный приводной агрегат, использующий способ управления рабочими режимами.
Эта задача и другие цели достигаются способом управления режимами работы гибридного приводного агрегата для транспортного средства, в частности скутера, в соответствии с п.1 формулы изобретения.
Дальнейшие характеристики и преимущества настоящего изобретения будут более очевидны из описания предпочтительного, но не ограничивающего варианта способа управления режимами работы гибридных приводных агрегатов в соответствии с изобретением, показанного иллюстративным и не ограничивающим образом на сопровождающих чертежах, на которых:
Фиг.1 является схематическим представлением первого варианта гибридного приводного агрегата для скутеров, использующего способ в соответствии с изобретением;
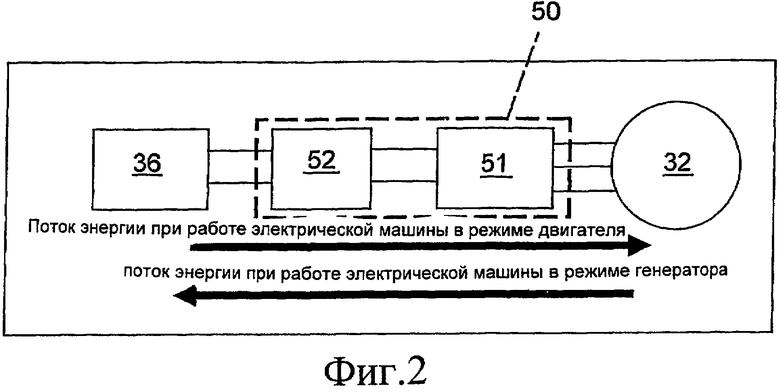
Фиг.2 является схемой потоков энергии между аккумуляторной системой и электрической машиной, в зависимости от выбранных режимов работы;
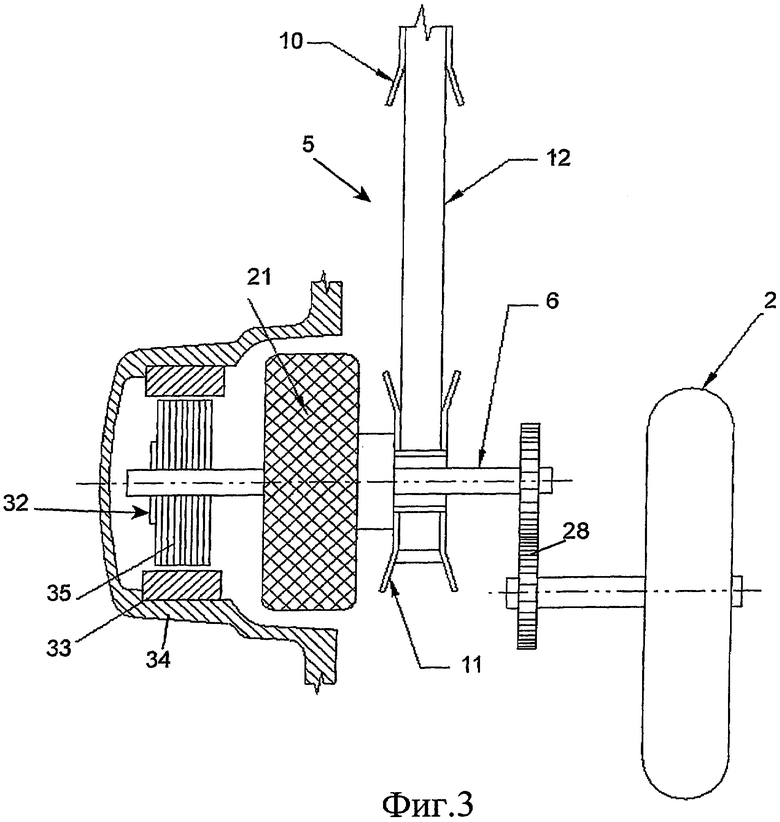
Фиг.3 является схематическим представлением второго варианта гибридного приводного агрегата для скутеров, использующего способ в соответствии с изобретением;
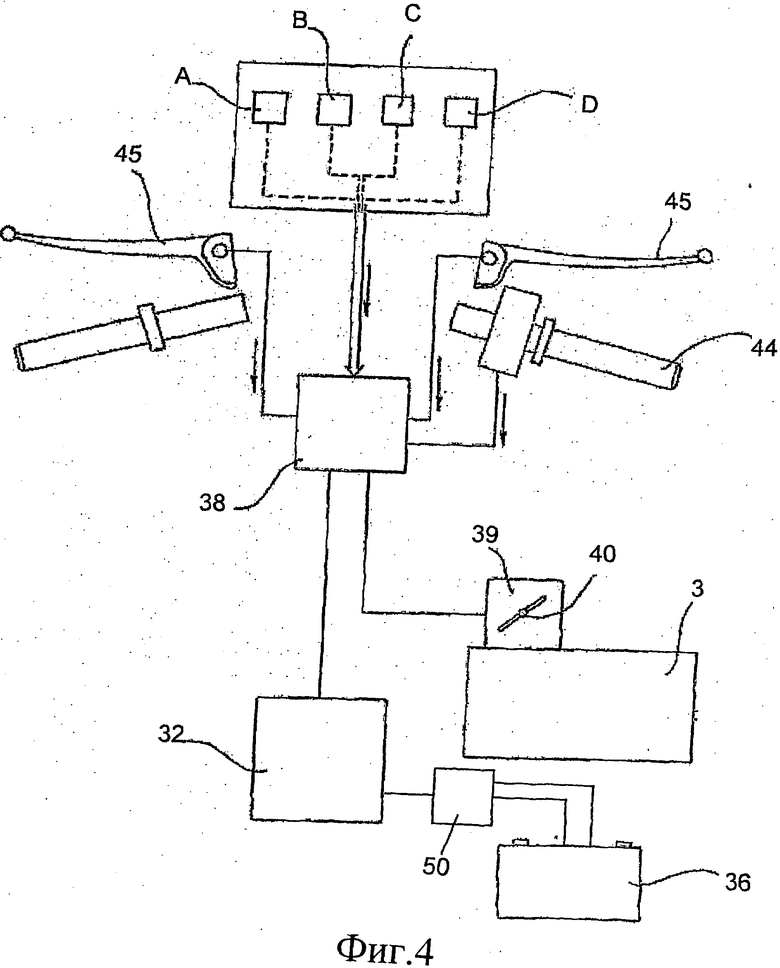
Фиг.4 является схемой системы управления оптимизированным распределением энергии приводного агрегата;
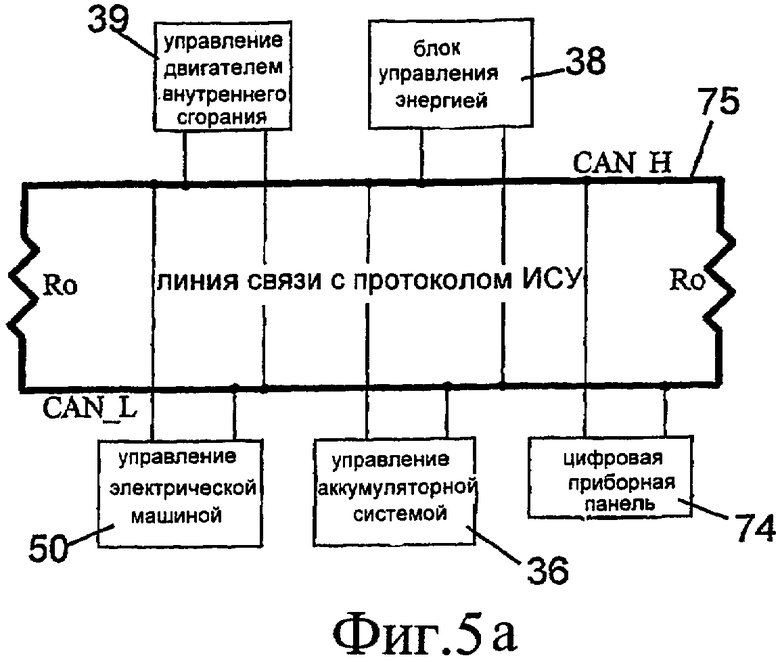
Фиг.5а является схематическим представлением первой архитектуры связи между модулями управления гибридного приводного агрегата в соответствии с изобретением;
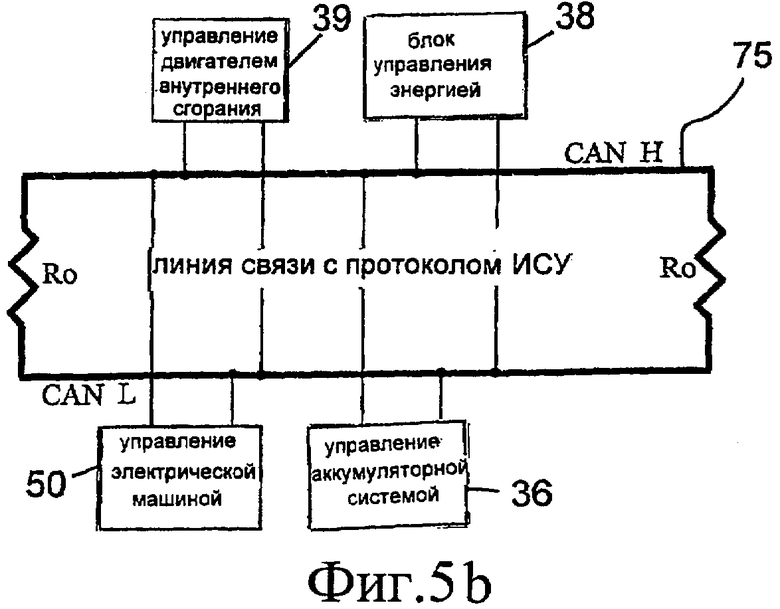
Фиг.5b является схематическим представлением второй архитектуры связи между модулями управления и контроля гибридного приводного агрегата в соответствии с изобретением;
Фиг.5с является схематическим представлением третьей архитектуры связи между модулями управления и контроля гибридного приводного агрегата в соответствии с изобретением;
Фиг.5d является схематическим представлением четвертой архитектуры связи между модулями управления и контроля гибридного приводного агрегата в соответствии с изобретением;
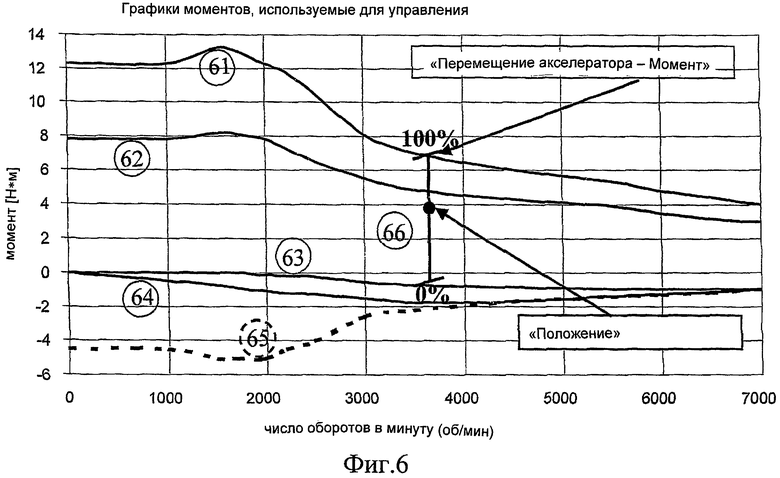
Фиг.6 является графическим представлением обработки входных команд устройства управления энергией.
Со ссылкой на указанные выше чертежи видно, что гибридный приводной агрегат 1 для скутеров, использующий способ в соответствии с изобретением, содержит двигатель 3 внутреннего сгорания, снабженный приводным валом 4, присоединенным посредством блока 5 трансмиссии к валу 6 передачи движения, соединенному, в свою очередь, с приводным колесом 2 посредством понижающей передачи 28.
Блок 5 трансмиссии содержит приводной шкив 10, ведомый шкив 11 и ремень 12, обернутый вокруг шкивов 10, 11. Ведомый шкив 11 выполнен с возможностью избирательного соединения с трансмиссионным валом 6 посредством центробежной муфты 8. Гибридный приводной агрегат 1 также содержит электрическую машину 32, коаксиальную с муфтой 8, но расположенную в другом осевом положении на трансмиссионном валу 6.
В частности, электрическая машина 32 имеет статор 33, установленный на неподвижном корпусе 34 коаксиально с трансмиссионным валом 6, и ротор 35, установленный непосредственно на трансмиссионном валу 6.
Такое инновационное устройство электрической машины 32 гарантирует уменьшение в размерах в радиальном направлении, по сравнению с электрическими машинами известного типа, и уменьшает инерцию роторной части электрической машины 32.
Кроме того, в описанном устройстве ротор 35 электрической машины 32 не подвержен напряжениям, возникающим благодаря теплу, создаваемому центробежной муфтой 8.
Электрическая машина 32, используемая в описанном иллюстративном варианте выполнения, состоит из статора 33 с обмотками трехфазного типа и ротора 35 с постоянными магнитами, расположенными внутри самого ротора 35. Расположение магнитов таково, чтобы создать асимметрию в магнитной цепи ротора.
Для своей работы электрическая машина 32 может использовать как вклад, который дают магниты, находящиеся на роторе, так и анизотропию магнитной цепи ротора. Она, следовательно, способна вращаться в обоих направлениях и отбирать или подводить крутящий момент. Это, следовательно, используется для обеспечения скутера тяговым усилием крутящего момента, забирая энергию от аккумуляторной системы 36, или забирая тормозной момент путем регенерации энергии в аккумуляторной системе 36.
Для этой цели управляющая электроника 50 электрической машины 32 состоит из первого электронного устройства 51 для питания фаз электрической машины (инвертор) и второго электронного устройства 52 с высокочастотным трансформатором, чтобы поднять входное напряжение (бустер). Это второе устройство 52, благодаря аккумуляторной системе 36, способно регулировать выходное напряжение независимо от изменений входного напряжения путем использования входной индуктивности.
Как показано на фиг.2, оба устройства 51, 52 позволяют прохождение энергии в обоих направлениях: от аккумуляторной системы 36 к электрической машине 32 и наоборот.
Аккумуляторная система 36 предполагает использование различных видов аккумуляторных батарей, таких как, например, свинцовые, свинцовые с гелем, никель-гидрид металла, литиевые батареи и т.д., с суперконденсорами или без них, и специальную электронику для управления и контроля (не показано).
Энергетическая аккумуляторная система имеет возможность подзаряжаться посредством внешнего зарядного устройства, как это обычно происходит. Дополнительное свойство указанной выше управляющей электроники 50 состоит в том, чтобы позволить подзаряжать энергетическую систему непосредственно через электрическую машину 32, избегая использования внешнего зарядного устройства.
Во втором варианте выполнения, показанном на фиг.3, предполагается использование приводной муфты 21 вместо центробежной инерционной муфты 8. Это решение позволяет постоянно соединять и отсоединять от приводного колеса 2 двигатель внутреннего сгорания, а электрический двигатель 32 выполнен за одно целое с колесом 2 только тогда, когда этого требует система. При использовании приводной муфты 21 преимущество заключается в том, что можно привести в действие двигатель 3 внутреннего сгорания с помощью электрического двигателя 32, осуществляющего стратегию «холостого хода»: когда транспортное средство находится в покое, двигатель 3 внутреннего сгорания выключается и, после перезапуска с одним только электрическим поступательным движением, может быть включено зажигание с помощью электрической машины 32, используемой для движения, которая выполнена за одно целое с валом 4 двигателя 3 внутреннего сгорания посредством приводной муфты.
Второй вариант выполнения также позволяет осуществить конфигурацию приводного агрегата как «гибридно-последовательную» с электрическим двигателем, который обеспечивает поступательное движение, и двигателем внутреннего сгорания, который, когда он функционирует, всегда работает в точках максимальной эффективности и через электрический генератор, установленный на выходной оси двигателя внутреннего сгорания, подзаряжает аккумуляторные батареи.
Система, состоящая из двигателя 3 внутреннего сгорания, аккумуляторной системы 36 и электрической машины 32, содержащей электронику 50 для относительного управления, в целом управляется так, чтобы обеспечить высокую эффективность работы.
Аккумуляторная система 36 на транспортном средстве, в сущности, используется для подачи энергии или для подзарядки через ту же управляющую электронику 50 электрической машины 32 оптимальным образом, в зависимости от выбранной стратегии управления энергией.
Для выполнения этой задачи предусмотрен блок 38 управления энергией, выполненный с возможностью соответствующего управления электрической машиной 32 и двигателем 3 внутреннего сгорания посредством специальных управляющих устройств 39, 50, на основе ряда получаемых входных параметров и/или команд. Блок 38 управления энергией, в сущности, способен интерпретировать запросы водителя в отношении режимов работы и движущего крутящего момента, управляя, таким образом, оптимальным образом объединенным функционированием двигателя 3 внутреннего сгорания и электрической машины 32 и уровнем зарядки аккумуляторной системы 36.
Для физической реализации варианта выполнения электронных управляющих устройств 38, 50, 39, 36 предусмотрены различные решения.
Техническое решение, определяемое как «компактное», содержит корпус различных управляющих электронных устройств 38, 50, 39, 36, описанных выше, объединенных в одном электронном устройстве. С другой стороны, в решении, определяемом как «распределенное», различные управляющие электронные устройства 38, 50, 39, 36 размещены в различных устройствах, расположенных в разных местах транспортного средства.
Также предлагаются промежуточные решения, в которых на транспортном средстве имеется два или большее количество устройств, которые содержат внутри себя одну или большее количество управляющих электронных схем.
Для решений, которые предусматривают два или большее количество устройств, распределенных на транспортном средстве, для правильного функционирования системы существует проблема обмена информацией между различными управляющими электронными схемами. Для этой цели предусмотрено использование линии 75 связи, которая использует протокол ИСУ (Информационной Сети Управления) (CAN).
Фиг.5а показывает линию 75 связи с протоколом ИСУ, с соответствующими разветвлениями, используемыми в предпочтительном варианте выполнения транспортного средства, оборудованного гибридным приводным агрегатом, использующим способ в соответствии с изобретением.
Каждое ИСУ-разветвление связано с электронным устройством со следующими функциями:
Разветвление «Управление Электрической Машиной»: это соответствует электронному устройству 50 управления электрической машиной 32. Устройство посылает информацию на ИСУ линию 75, относящуюся к электрическому приведению в действие, и получает различные сигналы команд приведения в действие от этой же линии;
Разветвление «Управление Двигателем Внутреннего Сгорания»: это соответствует электронному устройству 39 управления работой двигателя внутреннего сгорания. Устройство посылает информацию на ИСУ линию 75, относящуюся к двигателю внутреннего сгорания, и получает различные сигналы команд приведения в действие от этой же линии;
Разветвление «Цифровая Приборная Панель»: это соответствует устройству 74 визуализации, которое дает водителю информацию о состоянии функционирования транспортного средства. Устройство получает входные сигналы, которые нужно визуализировать, и может посылать информацию о различных сигналах, которые могут быть получены, например, о положении ручки 44 акселератора, и другие, описанные подробно ниже (Фиг.4);
Разветвление «Управление Аккумуляторной Системой»: это соответствует аккумуляторной системе 36, имеющейся на транспортном средстве, которая посылает информацию на ИСУ линию, соответствующую уровню ее зарядки, и принимает различные команды и входные управляющие сигналы;
Разветвление «Система Управления Энергией»: это соответствует блоку 38 управления энергией. Это устройство получает сигналы, посланные от других устройств 50, 39, 74, 36 от ИСУ линии 75, и посылает различные команды и управляющие сигналы к различным устройствам.
Устройство 74 визуализации может быть заменено эквивалентной приборной панелью с аналоговыми индикаторами, соответственно, устраняя разветвление «Цифровая Приборная Панель» на ИСУ линии 75. Пример этого решения представлен на Фиг.5b.
Если используется решение со свинцовыми аккумуляторными батареями, например, для получения аккумуляторной системы 36, разветвление «Управление Аккумуляторной Системой» может не присутствовать на линии 75. В этом случае это будет одно из других устройств, расположенных на транспортном средстве, которое получает характеристические значения аккумуляторной системы 36 и, возможно, передает данные через ИСУ 75. Пример этого решения приведен на Фиг.5с.
Если блок 38 управления энергией выполнен на аппаратурной основе одного из управляющих устройств 50, 39, расположенных на транспортном средстве, разветвление «Система Управления Энергией» может быть устранена. В этом случае управляющее устройство 50, 39, которое выполняет функции блока 38 управления энергией, будет выполнять соответствующие операции управления. Пример этого решения показан на Фиг.5d.
Способ, осуществляемый блоком 38 управления энергией, для управления режимами работы гибридного приводного агрегата, описан ниже.
В общих словах, чтобы выбрать оптимальный режим работы гибридного приводного агрегата 1, блок 38 управления энергией выполняет следующие этапы:
a) блок 38 управления энергией получает на входе ряд параметров и/или команд, среди которых стратегия управления, установленная водителем через селекторы А, В, С, D, поворот ручки 44 акселератора, состояние тормоза 45, скорость вращения ротора 35 электрической машины 32, угловое положение впускного клапана 40, крутящий момент, подводимый двигателем 3 внутреннего сгорания, скорость вращения двигателя 3 внутреннего сгорания и уровень зарядки аккумуляторной системы 36;
b) на основе полученных входных параметров и/или команд блок 38 управления энергией определяет состояние транспортного средства и крутящий момент, запрашиваемый водителем;
c) на основе значений, полученных на этапе b), как двигатель 3 внутреннего сгорания, так и электрическая машина 32 работают так, что сумма крутящих моментов, подводимых обоими механизмами, равна крутящему моменту, запрашиваемому водителем.
Способ управления рабочим режимом гибридного приводного агрегата, в соответствии с изобретением, предусматривает, что водитель может выбирать из следующих стратегий управления:
чисто электрическую, в которой одна только электрическая машина используется для создания поступательного движения;
стандартную гибридную, в которой как электрическая машина, так и двигатель внутреннего сгорания используются для создания поступательного движения, при этом блок 38 управления энергией поддерживает состояние зарядки аккумуляторных батарей на заранее фиксированном уровне;
высокозарядную гибридную, в которой блок 38 управления энергией управляет двумя машинами, так чтобы удовлетворить запросу водителя относительно крутящего момента и попытаться зарядить аккумуляторную систему как можно больше;
низкозарядную гибридную, в которой блок 38 управления энергией управляет двумя машинами, так чтобы удовлетворить запросу водителя относительно крутящего момента и минимизировать расход топлива, используя энергию, содержащуюся в аккумуляторной системе.
При чисто электрической стратегии муфта 8 механически отсоединяет, постоянным образом, двигатель 3 внутреннего сгорания от электрической машины 32 и, следовательно, также от приводного колеса 2 транспортного средства, выполненного с ней как единое целое. В этом режиме, когда запрашиваемый крутящий момент положителен, он создается одной только электрической машиной 32, тогда как если запрашиваемый крутящий момент отрицателен, для электрической машины 32 требуется тормозной момент.
При комбинированных стратегиях управления аккумуляторной и/или тяговой системой блок 38 управления энергией способен, согласно стратегии управления, выбранной водителем, работать в следующих рабочих режимах:
I) использование части энергии, подводимой двигателем внутреннего сгорания для зарядки батарей через электрическую машину, которая работает как генератор;
II) использование электрической машины в части замещения энергии, необходимой для поступательного движения, подводимой двигателем внутреннего сгорания, используя энергию, запасенную в аккумуляторной системе;
III) временное использование, при максимуме энергии, которая может быть подана двигателем внутреннего сгорания, энергии, подводимой электрической машиной;
IV) управление двумя машинами так, чтобы поддерживать определенный уровень зарядки в аккумуляторной системе.
На фиг.6 приводится иллюстративное объяснение того, как устройство 38 управления энергией определяет, согласно выбранной стратегии комбинированного управления, в каком рабочем режиме должны работать двигатель 3 внутреннего сгорания и электрическая машина.
Фиг.6 со ссылкой на номер позиции 61 показывает максимальный крутящий момент, который можно получить от суммирования максимального крутящего момента, который может подвести двигатель внутреннего сгорания, и максимального крутящего момента, который может быть подведен электрическим двигателем; кривая, относящаяся к максимальному крутящему моменту, который может подвести один двигатель внутреннего сгорания, показана номером позиции 62; номер позиции 63 относится к крутящему моменту, отбираемому электрической машиной при уменьшении скорости; тормозной момент, отбираемый электрической машиной во время торможения, показан номером позиции 64; номер позиции 65 показывает максимальный крутящий момент, который электрическая машина может отобрать, работая как генератор; наконец, номер позиции 66 относится к общему процентному ходу акселератора.
Во время работы транспортного средства вертикальный сегмент 66 хода акселератора остается между максимальным движущим крутящим моментом 61 и тормозным моментом, отбираемым электрической машиной при уменьшении скорости 63, но он движется со скоростью вращения приводного шкива 11.
Для каждого момента времени t блок 38 управления энергией устанавливает вертикальный сегмент 66 на значении числа оборотов в минуту приводного шкива 11 и показывает в процентах на указанном сегменте текущее положение ручки 44 акселератора.
Зафиксированное таким образом положение соответствует на оси ординат значению крутящего момента. Это значение интерпретируется как крутящий момент, запрашиваемый водителем.
В случае комбинированной стандартной гибридной стратегии управления запрос крутящего момента обеспечивается по-другому, в зависимости от области на чертеже, среди следующих трех областей, в которые она попадает:
- между линией 63, характеризующей тормозной момент, отбираемый электрической машиной при уменьшении скорости, и горизонтальной осью. В этом случае требуемый момент отрицательный: блок 38 управления энергией управляет закрытием дроссельного клапана 40 и может закрывать подачу топлива через управляющее устройство 39 и, сверх определенной скорости, посылает к электрической машине 32 запрос отрицательного момента, который заставляет ее работать как генератор, возвращая энергию в батарею;
- между горизонтальной осью и линией 62, характеризующей максимальный движущий крутящий момент, доступный одному двигателю внутреннего сгорания. Крутящий момент, требуемый в этом случае, является положительным, и меньше, чем максимальный момент, который может подать двигатель внутреннего сгорания; блок 38 управления энергией управляет открытием дроссельного клапана 40 через управляющее устройство 39, так чтобы регулировать подачу воздушно-бензиновой смеси внутрь камеры сгорания, и посылает запрос к электрической машине 32 (положительный или отрицательный), чтобы удовлетворить запрос крутящего момента, проконтролировать уровень зарядки и оптимизировать работу двигателя 3 внутреннего сгорания;
- между линией 62 и линией 61, относящейся к максимально возможному движущему крутящему моменту. В этом случае требуемый крутящий момент выше, чем максимальный подаваемый крутящий момент от двигателя 3 внутреннего сгорания: блок 38 управления энергией управляет открытием дроссельного клапана 40 через управляющее устройство 39, так что двигатель 3 внутреннего сгорания подает максимальный крутящий момент и посылает запрос положительного крутящего момента к электрической машине 32, чтобы удовлетворить запрос более высокого момента, осуществленный водителем.
Наконец, если водитель активирует тормозной рычаг 45, блок 38 управления энергией посылает запрос отрицательного крутящего момента к электрической машине 32, равного соответствующему значению крутящего момента на кривой 64 при заданной скорости вращения приводного шкива 11.
Комбинированная высокозарядная гибридная стратегия управления имеет задачу осуществления зарядки аккумуляторной системы 36 как можно быстрее, поддерживая затем состояние зарядки на достигнутом максимальном уровне.
Когда требуемый крутящий момент находится между линией 62, характеризующей максимальный крутящий момент, который можно получить от одного двигателя 3 внутреннего сгорания, и линией 61, относящейся к максимальному имеющемуся крутящему моменту, максимальное значение момента в зависимости от числа оборотов определяется так, чтобы не возникло значительной опасности для работы транспортного средства при ускорении. Таким образом, движущий крутящий момент, подводимый электрической машиной, ограничен и, следовательно, энергия берется от аккумуляторных батарей.
Когда, с другой стороны, требуемый крутящий момент находится между горизонтальной осью и линией 62, двигатель внутреннего сгорания будет подводить весь необходимый для движения крутящий момент. Кроме того, если двигатель работает в областях максимума эффективности, система будет использовать его крутящий момент с избытком, по отношению к тому, что требуется, чтобы зарядить аккумуляторную систему, используя электрическую машину как генератор.
В фазах снижения скорости и торможения система функционирует так же, как и в стандартном гибридном режиме, используя электрическую машину как генератор, подводящий энергию в аккумуляторную систему.
В низкозарядном гибридном режиме задача состоит в том, чтобы отдать предпочтение энергии, присутствующей в электрической машине 32, а не энергии, поступающей от топлива, чтобы, тем самым, уменьшить расход топлива.
Существенное различие с управлением, используемым в стандартном гибридном режиме, может быть найдено, когда запрашиваемый водителем крутящий момент попадает в область между горизонтальной осью и линией 62: часть требуемого крутящего момента подводит электрическая машина 32, в то время как остающаяся часть обеспечивается двигателем 3 внутреннего сгорания. Крутящий момент, требуемый электрической машиной 32, должен в любом случае быть таким, чтобы поддерживать работу двигателя 3 внутреннего сгорания в области максимальной эффективности.
Если двигатель 3 внутреннего сгорания является не карбюраторным двигателем, а двигателем с впрыском топлива, то для управления подведением крутящего момента используется электронное устройство 39, способное регулировать подачу воздуха внутрь двигателя и автоматически управлять параметрами, характерными для двигателей с впрыском топлива.
В сущности было подтверждено, что описанный таким образом способ, выполненный в соответствии с изобретением, гарантирует управление режимом работы гибридных приводных агрегатов, которое обеспечивает достижение высоких рабочих характеристик, касающихся оптимизации управления энергией.
В сущности было установлено, что электрическая машина работает как двигатель или как генератор тока, в зависимости от требований оптимизации расхода энергии. Конкретное управление в соответствии с изобретением позволяет электрической машине поддерживать состояние зарядки на заранее установленном уровне, который может соответствовать максимальной зарядке, или другому заранее заданному значению, или давать вклад в движущий крутящий момент, такой, который обеспечивает работу двигателя внутреннего сгорания оптимальным образом.
Также показано, что описанный гибридный приводной агрегат для скутеров способен реализовать способ управления рабочим режимом в соответствии с изобретением.
Изобретение, сформулированное таким образом, может быть подвержено многочисленным модификациям, дополнениям и вариантам, которые все входят в концептуальный объем изобретения.
Объем защиты, определенный в пунктах формулы изобретения, не должен рассматриваться как ограниченный предпочтительными вариантами, проиллюстрированными в описании и на чертежах в качестве примеров, но должен включать все новые патентоспособные характеристики, которые присущи настоящему изобретению, включая характеристики, которые рассматриваются специалистами как эквивалентные.



Изобретение относится к способу управления режимом работы гибридного приводного агрегата и к гибридному приводному агрегату. Способ включает определение требуемого крутящего момента и состояния транспортного средства, приведение в действие двигателя внутреннего сгорания и приведение в действие электрической машины. Двигатель внутреннего сгорания и/или электрическую машину приводят в действие так, чтобы удовлетворить требуемому крутящему моменту и/или привести аккумуляторную систему к установленному уровню зарядки. Гибридный приводной агрегат содержит двигатель внутреннего сгорания, электрическую машину и блок управления энергией для управления двигателем внутреннего сгорания и электрической машиной согласно вышеуказанному способу. Технический результат заключается в оптимизации управления энергией. 2 н. и 25 з.п. ф-лы, 9 ил.
1. Способ управления режимом работы гибридного приводного агрегата транспортного средства, в частности скутера, содержащего по меньшей мере один двигатель (3) внутреннего сгорания и одну электрическую машину (32), включающий фазу а) определения требуемого крутящего момента и состояния транспортного средства на основе полученных входных параметров и/или команд, отличающийся тем, что способ включает фазы: b) приведения в действие указанного двигателя (3) внутреннего сгорания так, чтобы он не подводил крутящий момент, и приведения в действие электрической машины (32), которая функционирует как генератор для зарядки аккумуляторной системы (36), когда указанный крутящий момент отрицательный, с) приведения в действие указанного двигателя (3) внутреннего сгорания и/или указанной электрической машины (32) так, чтобы удовлетворить указанному требуемому крутящему моменту и/или привести указанную аккумуляторную систему (36) к заранее установленному уровню зарядки и/или привести в действие указанный двигатель (3) внутреннего сгорания в условиях режима максимальной эффективности, когда требуемый крутящий момент положителен и меньше, чем максимальный крутящий момент, который может быть подведен указанным двигателем (3) внутреннего сгорания, d) приведения в действие указанного двигателя (3) внутреннего сгорания и/или указанной электрической машины (32), создающих крутящий момент, чтобы удовлетворить требуемому крутящему моменту, когда указанный крутящий момент положителен и больше, чем максимальный крутящий момент, который может быть подведен двигателем (3) внутреннего сгорания, при этом указанные параметры и/или команды, используемые при определении требуемого крутящего момента и состояния указанного транспортного средства выбирают из группы, состоящей из стратегии управления указанным транспортным средством, вращения ручки (44) акселератора указанного транспортного средства, состояния по меньшей мере одного тормоза (45) указанного транспортного средства, скорости вращения ротора (35) указанной электрической машины (32), крутящего момента, подводимого двигателем (3) внутреннего сгорания, скорости вращения двигателя (3) внутреннего сгорания, углового положения дроссельного клапана (40) указанного двигателя (3) внутреннего сгорания, воздушного потока внутри указанного двигателя (3) внутреннего сгорания, состояния зарядки указанной аккумуляторной системы (36), и их комбинаций.
2. Способ управления режимом работы гибридного приводного агрегата по п.1, в котором указанную команду, относящуюся к стратегии управления указанным транспортным средством, могут выбирать из группы, состоящей из следующих режимов: чисто электрический рабочий режим, в котором одну только электрическую машину (32) используют для создания поступательного движения, стандартный гибридный рабочий режим, в котором как электрическую машину (32), так и двигатель (3) внутреннего сгорания используют для создания поступательного движения, при этом поддерживают состояние зарядки аккумуляторных батарей на заранее фиксированном уровне, высокозарядный гибридный рабочий режим, в котором как электрическую машину (32), так и двигатель (3) внутреннего сгорания приводят в действие, чтобы удовлетворить требуемому крутящему моменту и зарядить аккумуляторную систему (36) как можно больше, низкозарядный гибридный рабочий режим, в котором как электрическую машину (32), так и двигатель (3) внутреннего сгорания приводят в действие, чтобы удовлетворить требуемому крутящему моменту, минимизируя при этом расход топлива.
3. Способ управления рабочим режимом гибридного приводного агрегата по п.2, в котором, когда указанная стратегия управления является стандартным гибридным рабочим режимом, в указанной фазе с) указанный двигатель (3) внутреннего сгорания приводят в действие таким образом, чтобы подводить весь требуемый крутящий момент, также используя избыточный крутящий момент для зарядки указанной аккумуляторной системы (36) до заранее установленного уровня, если указанная аккумуляторная система (36) имеет уровень зарядки ниже, чем заранее установленный уровень, и в указанной фазе d) указанный двигатель (3) внутреннего сгорания приводят в действие таким образом, чтобы подводить максимально возможный крутящий момент, а указанную электрическую машину (32) приводят в действие так, чтобы удовлетворить требованию более высокого крутящего момента.
4. Способ управления рабочим режимом гибридного приводного агрегата по п.2, в котором, когда указанная стратегия управления является стандартным гибридным рабочим режимом, в указанной фазе с) указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы работать в условиях режима максимальной эффективности, в котором указанная аккумуляторная система (36) имеет зарядку, по существу, заранее установленного уровня, а указанную электрическую машину (32) приводят в действие так, чтобы удовлетворить требованию более высокого крутящего момента, и в указанной фазе d) указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы подводить максимально возможный крутящий момент, а указанную электрическую машину (32) приводят в действие так, чтобы удовлетворить требованию более высокого крутящего момента.
5. Способ управления рабочим режимом гибридного приводного агрегата по п.2, в котором, когда указанная стратегия управления является высокозарядным гибридным рабочим режимом, в указанной фазе с) указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы подвести весь требуемый крутящий момент, используя избыточный крутящий момент для зарядки указанной аккумуляторной системы (36), если указанный двигатель (3) внутреннего сгорания работает в условиях режима максимальной эффективности, в указанной фазе d) указанную электрическую машину (32) приводят в действие так, чтобы подвести ограниченный движущий крутящий момент, а указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы подвести максимально возможный подводимый крутящий момент.
6. Способ управления рабочим режимом гибридного приводного агрегата по п.2, в котором, когда указанная стратегия управления является низкозарядным гибридным рабочим режимом, в указанной фазе с) указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы он работал в условиях режима максимальной эффективности, а указанную электрическую машину (32) приводят в действие так, чтобы удовлетворять требованию более высокого крутящего момента, и в указанной фазе d) указанный двигатель (3) внутреннего сгорания приводят в действие так, чтобы подводить максимально возможный подводимый крутящий момент, а указанную электрическую машину (32) приводят в действие так, чтобы удовлетворить требованию более высокого крутящего момента.
7. Способ управления рабочим режимом гибридного приводного агрегата по пп.1-6, также включающий фазу посылки запроса отрицательного крутящего момента к электрической машине (32) при активации по меньшей мере одного тормоза (45).
8. Способ управления рабочим режимом гибридного приводного агрегата по п.2, в котором, когда указанная стратегия управления является чисто электрическим рабочим режимом, в указанной фазе b) указанная электрическая машина (32) подводит тормозной момент, в указанных фазах с) и d) приводят в действие только одну указанную электрическую машину (32), чтобы подвести движущий крутящий момент.
9. Гибридный приводной агрегат для транспортных средств, в частности скутеров, содержащий по меньшей мере один двигатель (3) внутреннего сгорания и по меньшей мере одну электрическую машину (32), выполненную с возможностью приведения действия отдельно или в комбинации с указанным двигателем (3) внутреннего сгорания, отличающийся тем, что указанный агрегат содержит блок (38) управления энергией для управления по меньшей мере одним двигателем (3) внутреннего сгорания и по меньшей мере одной электрической машиной (32) в ответ на ряд входных сигналов согласно способу по п.1.
10. Гибридный приводной агрегат по п.9, отличающийся тем, что указанный ряд входных сигналов соответствует одному или большему количеству параметров, выбранных из группы, состоящей из стратегии управления указанным транспортным средством, вращения ручки (44) акселератора указанного транспортного средства, состояния по меньшей мере одного тормоза (45) указанного транспортного средства, скорости вращения ротора (35) указанной электрической машины (32), крутящего момента, подводимого двигателем (3) внутреннего сгорания, скорости вращения двигателя (3) внутреннего сгорания, углового положения дроссельного клапана (40) указанного двигателя (3) внутреннего сгорания, воздушного потока внутри указанного двигателя (3) внутреннего сгорания, состояния зарядки указанной аккумуляторной системы (36).
11. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанная электрическая машина является электрической машиной обратимого типа.
12. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанная электрическая машина (32) содержит статор (33) с обмотками трехфазного типа и ротор (35).
13. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанный ротор имеет постоянные магниты, причем указанные магниты расположены внутри ротора так, чтобы создать асимметрию в магнитной цепи ротора.
14. Гибридный приводной агрегат по п.12, отличающийся тем, что указанный статор (33) установлен на неподвижном корпусе (34) коаксиально с трансмиссионным валом (6) указанного транспортного средства, а указанный ротор установлен непосредственно на указанном трансмиссионном валу (6).
15. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанная электрическая машина (32) имеет управляющую электронику (50), содержащую первое электронное устройство (51), подходящее для питания фаз указанной электрической машины (32), и/или второе электронное устройство (52), подходящее для поднятия входного напряжения.
16. Гибридный приводной агрегат по п.15, отличающийся тем, что указанное второе электронное устройство (52) выполнено с высокочастотным трансформатором.
17. Гибридный приводной агрегат по п.15, отличающийся тем, что указанное первое электронное устройство (51) является инвертором, а указанное второе электронное устройство (52) является бустером.
18. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанный двигатель (3) внутреннего сгорания приводится в действие управляющим устройством (39) так, чтобы подводить крутящий момент.
19. Гибридный приводной агрегат по п.18, отличающийся тем, что указанный блок (38) управления энергией реализован по меньшей мере в одном из выбранных устройств: указанном управляющем устройстве (50) указанной электрической машины (32) и указанном управляющем устройстве (39) указанного двигателя (3) внутреннего сгорания.
20. Гибридный приводной агрегат по п.18, отличающийся тем, что указанный блок (38) управления энергией посылает управляющие сигналы по меньшей мере одному, выбранному из: указанного управляющего электронного устройства (50) указанной электрической машины (32), указанного управляющего устройства (39) указанного двигателя (3) внутреннего сгорания, указанной аккумуляторной системы (36), цифровой приборной панели (74).
21. Гибридный приводной агрегат по п.20, отличающийся тем, что указанный блок (38) управления энергией сообщается с указанным управляющим электронным устройством (50) и цифровой приборной панелью (74) по линии (75) связи.
22. Гибридный приводной агрегат по п.21, отличающийся тем, что указанная линия (75) связи использует для связи протокол ИСУ (Информационную Сеть Управления).
23. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанный двигатель (3) внутреннего сгорания соединен с центробежной муфтой (8).
24. Гибридный приводной агрегат по п.9 или 10, отличающийся тем, что указанный двигатель (3) внутреннего сгорания соединен с приводной муфтой (21).
25. Гибридный приводной агрегат по п.24, отличающийся тем, что указанная электрическая машина (32) используется для запуска двигателя (3) внутреннего сгорания.
26. Гибридный приводной агрегат по п.24, отличающийся тем, что указанная электрическая машина (32) приводится в действие так, чтобы подводить требуемое поступательное движение, а указанный двигатель (3) внутреннего сгорания приводится в действие так, чтобы работать в точках максимальной эффективности, заряжая указанную аккумуляторную систему (36) через электрический генератор, установленный на выходе оси указанного двигателя (3) внутреннего сгорания.
27. Гибридный приводной агрегат по п.14, отличающийся тем, что указанное управляющее электронное устройство (50) используется для зарядки указанной аккумуляторной системы (36).
| Способ качественного определения моноперокси или дипероксикарбоновых кислот | 1987 |
|
SU1518737A1 |
| Механизм решетных станов | 1986 |
|
SU1340645A1 |
| Автомат для правки и рубки проволоки | 1987 |
|
SU1574379A1 |
| СИСТЕМА ПОДАЧИ ТОПЛИВА ДЛЯ ТОПЛИВНЫХ ЭЛЕМЕНТОВ И ПОДВИЖНОЕ ТЕЛО | 2001 |
|
RU2233511C1 |

