Изобретение относится к гидрологии, в частности к способам и устройствам определения глубин акватории, и может быть использовано в гидрографии для обеспечения создания морских атласов, а также для проведения мониторинга на морях и океанах.
Известные способы определения глубин основаны на измерении параметров эхосигнала при зондировании дна гидроакустическими сигналами, приеме отраженных от дна сигналов с последующей их обработкой для определения глубин акватории, распознавании подводных грунтов и воспроизведении результатов съемки рельефа дна акватории [1]. В качестве измерительной аппаратуры используются эхолоты [1, 2, 3, 4, 5] или гидролокаторы бокового обзора [6, 7, 8, 9], установленные на носителях (суда, подводные аппараты).
В известном устройстве [5] техническим результатом изобретения является увеличение точности определения параметров отражающей границы, повышение достоверности результатов измерения, повышение надежности обнаружения объектов с отличными от границы отражательными характеристиками и определение местонахождения границы по сравнению с техническими решениями, описанными в источниках [1, 2, 3, 4].
Заявленный технический результат [5] достигается тем, что в устройство, содержащее эхолот, к сигнальному выходу которого последовательно подсоединены приемный тракт, второй вход которого соединен с синхронизирующим выходом эхолота, формирователь опорных импульсов, вход которого соединен с выходом приемного тракта, выход формирователя опорных импульсов соединен с вторым входом схемы вычитания, измеритель удлинения эхосигналов и индикатор, введены первая схема совпадения, первый вход которой соединен с выходом приемного тракта, второй вход соединен с выходом схемы вычитания, а выход соединен с измерителем удлинения эхосигналов, вторая схема совпадения, первый вход которой соединен с выходом схемы вычитания, второй вход соединен с выходом формирователя опорных импульсов, а вход соединен с индикатором, формирователь опорных импульсов состоит из генератора линейно-частотно-модулированного сигнала, выход которого соединен со счетным входом счетчика и генератора импульсов, выход которого соединен с установочным входом счетчика. Ввод новых элементов по сравнению с техническими решениями [1, 2, 3, 4] обеспечивает исключение из длительности эхосигнала длительности посылки, что обеспечивает возможность получения заявленного технического результата в части повышения точности определения жесткости отражающей границы, вызванной систематической погрешностью измерения удлинения эхосигнала, величина которой зависит от расстояния до дна (глубины) и обусловлена конечным углом раскрыва характеристики направленности приемной и излучающей антенн эхолота.
Однако ввиду того, что апертурное удлинение зависит не только от глубины, но и от некоторых других факторов, например таких, как изменение скорости звука в морской воде, изменение углов наклона лучей антенной системы, наличие вертикальных составляющих скорости носителя измерительной аппаратуры, изменение несущей частоты акустического излучения, неполное использование общего времени измерения отраженных сигналов, необходимость запоминания измеренных значений сигналов в паузах между импульсами, что усложняет устройства обработки сигнала, снижает точность измерения, то технический результат может быть достигнут только при размещении эхолота в стационарных условиях на неподвижном основании, что существенно сужает область применения известного технического решения и практически не позволяет использовать его для непрерывной классификации с удаленного места, например подвижного морского объекта, для обеспечения решения задач, связанных с выбором участков для установки подводных коммуникаций, с измерением магнитных, гравитационных и других полей вблизи дна, а также с картографией. Отсутствие подробной информации о рельефе дна в глубоководных районах и привязки его элементов к координатам при выполнении перечисленных задач может привести к принятию неверного решения. Кроме того, в соответствии с требованиями стандартов Международного гидрографического общества, эхолотирование при съемке рельефа дна рекомендуется на глубинах не более 100 метров (см. например, Дадашев А.А. Стандарты международной гидрографической организации для гидрографических исследований и проблемы их внедрения / Записки по гидрографии. СП. Главное управление навигации и океанографии МО РФ, 1999, № 248, с.27-33).
Известен способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор для его осуществления [8], который также используется для выполнения съемки рельефа дна акватории и включает излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин акватории расчетным путем, в котором измеряют время задержки прихода отраженного гидроакустического сигнала по вертикали, определяют время задержки прихода тех же синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному направлению в соответствии с математической зависимостью, затем определяют сходимость вычисленных и измеренных значений времен по критерию путем математических вычислений по соответствующей формуле для каждого количества измеренных значений времен, при этом последовательно измеряют начальное значение расчетного направления по каждому расчетному направлению, а за искомые направления прихода синфазных сигналов принимают количество расчетных направлений, характеризующихся минимальным значением. Данный способ реализуется посредством фазового гидролокатора бокового обзора для определения глубин акватории, содержащего первую и вторую антенны, одна из которых приемоизлучающая, расположенные по вертикали на заданном расстоянии, передающий блок, первый и второй приемоизмерительные блоки, блок управления, вычислитель и регистратор, при этом выходы первой и второй антенн подключены соответственно к входам первого и второго приемоизмерительных блоков, выход передающего блока соединен с приемоизлучающей антенной, выходы первого и второго приемоизмерительных блоков подключены к входам вычислителя, выход последнего подключен к регистратору, а блок управления соединен с первым и вторым приемоизмерительными блоками, передающим блоком, вычислителем-регистратором, в который дополнительно введен блок определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вход которого соединен с выходом блока управления, а выход подключен к входу вычислителя.
В данном техническом решении заявленный технический результат достигается тем, что определяется время задержки прихода синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному направлению и определением по полученным данным направления прихода синфазных сигналов и искомых глубин акватории расчетным путем, а фазовый гидролокатор бокового обзора для определения глубин акватории содержит блок определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению и искомых направлений отраженных от поверхности дна синфазных сигналов, что обеспечивает упрощение процесса определения глубины акватории фазовым гидролокатором бокового обзора, так как отсутствует необходимость в выполнении таких действий, как излучать вспомогательный гидроакустический сигнал на частоте, отличающейся от частоты основного гидроакустического сигнала, принимать отраженные вспомогательные синфазные сигналы в тех же двух точках, где принимаются основные синфазные сигналы, измерять время задержки прихода вспомогательных синфазных сигналов и исключается необходимость использования вспомогательного фазового гидролокатора бокового обзора, чем отягощены известные технические решения [6,7].
Однако, как известно [9], точность определения координат элементов рельефа в основном оценивается по точности знания места носителя измерительной аппаратуры. В то же время при детальной гидрографической съемке точность привязки элементов рельефа к координатам в значительной степени определяется положением на дне пятна, освещаемого гидролокатором бокового обзора. И если место носителя может быть определено с достаточной степенью точности по радионавигационным или спутниковым системам, то в случае качки, рысканья значения углов сноса, дифферента и крена носителя измерительной аппаратуры не остаются постоянными, изменяясь в первом приближении по гармоническому закону (см. например: Senpaku, 1974, v.47, № 3, р.35-43). Транспортное запаздывание при этом также имеет переменный характер, что приводит к снижению энергетических характеристик и, как следствие, к дополнительным динамическим погрешностям в работе гидролокатора бокового обзора. Кроме того, определение искомых глубин расчетным путем выполняется с использованием режимной информации для конкретной акватории. Однако неопределенность в расчете звукового поля по климатическим данным или опорному профилю, которые, как правило, не совпадают с фактическим, приводит к дополнительным случайным погрешностям в конечном результате ввиду отклонений реального уровня от опорного (см. например: Ефимов С.А., Тюрин А.В. Количественная оценка погрешности в акустических расчетах, обусловленной горизонтальной неоднородностью поля скорости звука / Записки по гидрографии. С-П. Главное управление навигации и океанографии МО РФ, 1996, № 239, с.55-61). Также существенным недостатком известного способа и устройства для его осуществления является влияние на конечный результат нестабильности физико-химических характеристик морской воды, что влечет за собой изменение скорости звука и, как следствие, этого появление дополнительной погрешности. Особенно отрицательно сказывается на конечных результатах измерения изменение скорости звука в слое воды непосредственно на горизонте антенны (см. например: Navigation, 1974, v.XXII, № 85, p.21-30; Shipbuilding and Shipping Record, 1968, v.112, № 4, p.124-125). В известных технических решениях для уменьшения этой погрешности выполняют косвенное определение изменения скорости звука по приближенным формулам, выражающим зависимости скорости звука от физико-химических свойств морской воды. По полученным косвенным методом значениям рассчитывают поправки, которые учитывают при окончательных вычислениях измеренных глубин, что может негативно сказаться на конечном результате. При этом наименее стабильным фактором, влияющим на скорость звука в морской воде, является температура воды.
Задачей заявляемого технического решения является повышение достоверности определения глубины и распознавания грунта для последующего воспроизведения рельефа морского дна.
Поставленная задача решается за счет того, что в способе определения глубин акватории, включающем излучение гидроакустического сигнала фазовым гидролокатором бокового обзора и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерения времени задержки синфазных сигналов по вертикали, в том числе и отраженных от ровной поверхности дна по каждому расчетному направлению, углов бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин, распознавание морского грунта, в котором дополнительно измеряют изменения скорости звука непосредственно на горизонте антенны, по значениям которых вводят корректирующие сигналы, определяют угол сноса носителя антенн, линейные и угловые скорости и ускорения непосредственно на корпусе антенн, выполняют разноглубинное накапливание информации при фиксированной средней точке с последующим определением точек на профиле дна с резко выраженными неровностями, вводят поправку временного кода, определяемого за время измерений, распознавание морского грунта выполняют методом кластеризации и численного анализа, а в устройство для осуществления способа, представляющего собой гидролокатор бокового обзора для определения глубин акватории, содержащий первую и вторую антенну, одна из которых приемоизлучающая, расположенные по вертикали на заданном расстоянии, передающий блок, первый и второй приемоизмерительные блоки, блок управления, вычислитель, регистратор, блок определения временной задержки прихода от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, при этом выходы первой и второй антенн подключены соответственно к входом первого и второго приемоизмерительных блоков, выход передающего блока соединен с приемоизлучающей антенной, выходы первого и второго приемоизмерительных блоков подключены к входам вычислителя, выход последнего подключен к регистратору, а блок управления соединен с первым и вторым приемоизмерительными блоками, передающим блоком, регистратором и вычислителем еще одним входом соединенный с выходом блока определения временной задержки прихода от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вход которого соединен с выходом блока управления, в который введено устройство коррекции скорости звука на горизонте антенны, выход которого соединен с входом передающего блока, на корпусе антенн установлены блок датчиков измерения линейных и угловых скоростей и ускорений, выходы которых соединены с входами вычислителя, который еще двумя входами соединен с выходом системы курсоуказания и выходом измерителя скорости носителя антенн, устройство хронирования информации, выход которого соединен с входом блока управления.
В отличие от известных способов и устройств определения глубин акватории в заявляемом техническом решении измеряют изменение скорости звука непосредственно на горизонте антенны, по значениям которых вводят корректирующие сигналы, что позволяет учитывать изменение скорости звука в слое воды непосредственно на горизонте антенны для поддержания постоянной длины волны колебаний, излучаемых антенной; определение угла сноса носителя антенн, параметры которых закладываются в вычислитель для получения окончательных результатов, позволяет уменьшить относительную погрешность измерений, обусловленную наличием неучтенного сноса носителя антенн; определение в период выполнения измерений линейных и угловых скоростей и ускорений непосредственно в месте установки антенн позволяет уменьшить погрешности, обусловленные изменением динамических характеристик носителя антенн; выполнение разноглубинного накапливания информации при фиксированной средней точке с последующим определением точек на профиле дна с резко выраженными неровностями позволяет уменьшить влияние шумовых факторов, складывающихся из собственных шумов носителя антенн и шумов моря, вызванных волнением морской поверхности; ввод поправки временного кода, определяемого за время измерений, позволяет вводит температурные поправки с высокой точностью, что обеспечивает стабильную работу опорного генератора; распознавание морского грунта методом кластеризации и численного анализа позволяет производить оценку достоверности конечных результатов по значениям стандартных коэффициентов рассеивания звука в зависимости от типа грунта, что упрощает трудоемкий процесс вычислений и последующего анализа.
Новыми отличительными признаками заявляемого технического решения являются измерение изменения скорости звука непосредственно на горизонте антенны, определение угла сноса носителя антенн, измерение линейных и угловых скоростей и ускорений непосредственно на корпусе антенн, выполнение разноглубинного накапливания информации при фиксированной средних точках на профиле дна с резко выраженными неровностями, ввод поправки временного кода, определяемой за время измерений, распознавание морского грунта методом кластеризации и численного анализа.
Совокупность новых признаков из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность изобретения поясняется чертежами.
Фиг.1. - блок-схема фазового гидролокатора бокового обзора для определения глубин акватории и классификации рельефа дна.
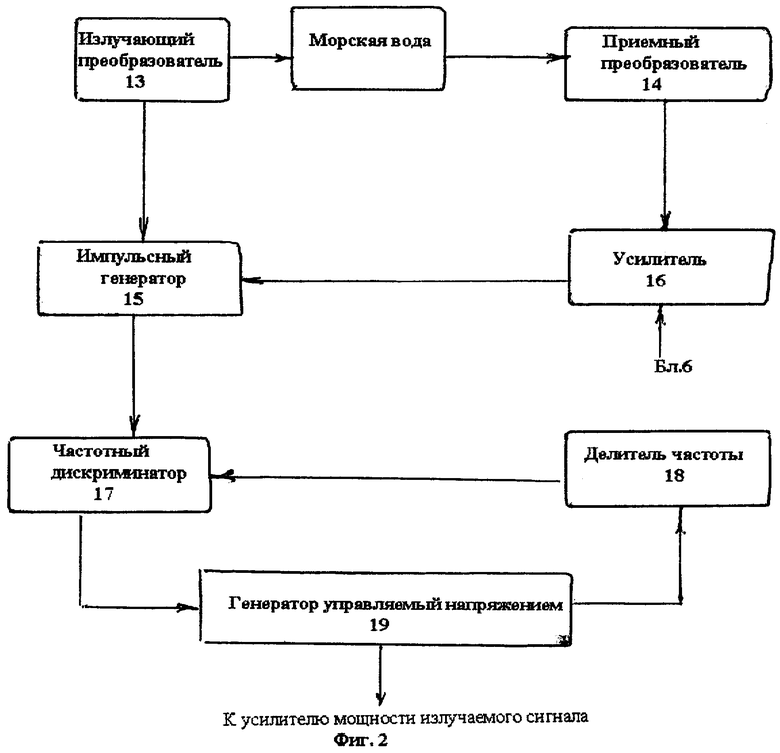
Фиг.2. - блок-схема устройства коррекции.
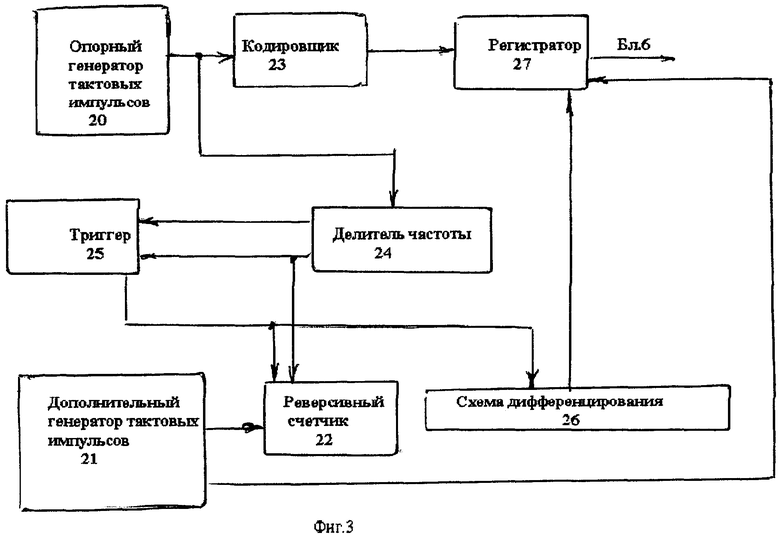
Фиг.3. - блок-схема устройства хронирования информации.
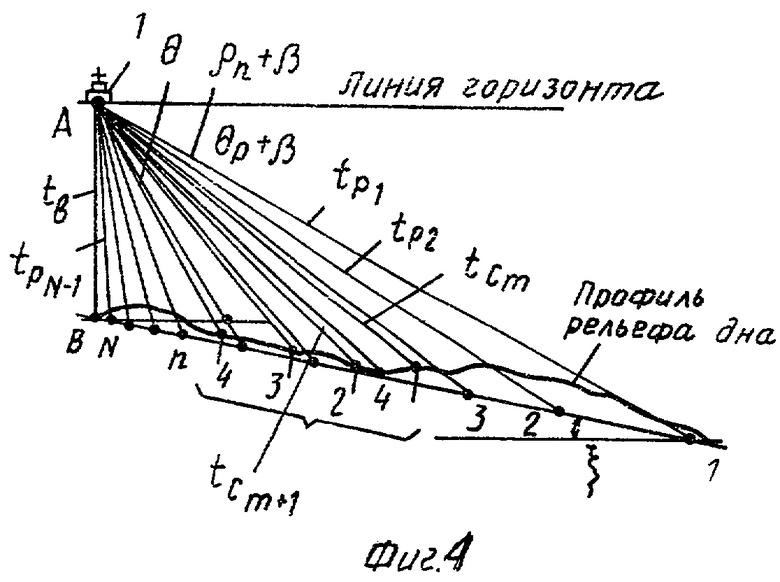
Фиг.4. - пример реализации способа.
Фазовый гидролокатор бокового обзора (фиг.1) содержит функционально соединенные первую 1 и вторую 2 антенны, одна из которых приемоизлучающая, передающий блок 3, первый 4 и второй 5 приемоизмерительные блоки, блок управления 6, блок 7 определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вычислитель 8, регистратор 9, устройство коррекции 10, устройство хронирования информации 11, блок датчиков 12 измерения линейных и угловых скоростей и ускорений.
Устройство коррекции 10 (фиг.2) содержит излучающий 13 преобразователь, приемный 14 преобразователь, импульсный генератор 15, усилитель 16, частотный дискриминатор 17, делитель частоты 18, генератор 19, управляемый напряжением, в котором выход излучающего 13 преобразователя соединен со входом импульсного генератора 15, который вторым входом соединен с выходом усилителя 16, вход которого соединен с выходом приемного 14 преобразователя, вход которого по гидроакустическому каналу связи соединен со вторым выходом излучающего 13 преобразователя, выход импульсного генератора 15 соединен с входом частотного дискриминатора 17, второй вход которого соединен с выходом делителя частоты 18, вход которого соединен с выходом генератора 19 управляемого напряжением, вход которого соединен с выходом частотного дискриминатора 17, а выход генератора 19 управляемого напряжением соединен с входом передающего блока 4.
Устройство хронирования информации 11 (фиг.3) содержит опорный генератор тактовых импульсов 20, дополнительный генератор тактовых импульсов 21, реверсивный счетчик 22, кодировщик 23, делитель частоты 24, триггер 25, схему дифференцирования 26, регистратор 27, в котором генератор тактовых импульсов 20 своим выходом соединен с входом кодировщика 23 и делителя частоты 24, который двумя выходами соединен с входом триггера 25, один из которых еще соединен с входом реверсивного счетчика 22, второй вход которого соединен с выходом дополнительного генератора тактовых импульсов 21, а третий вход которого соединен с выходом триггера 25, который этим же выходом соединен с входом схемы дифференцирования 26, которая выходом соединена с входом регистратора 27, который еще одним входом соединен с выходом кодировщика 23, а другим входом с выходом реверсивного счетчика 22.
Способ реализуется следующим образом.
По командным импульсам, вырабатываемым блоком управления 6 в соответствии с управляющей программой, осуществляется формирование в передающем блоке 3 акустического импульса и излучение его приемоизлучающей антенной 2 в сторону дна, а также прием и преобразование в электрический сигнал отраженных сигналов первой 1 и второй 2 антеннами. Затем эти сигналы по командным импульсам, выработанным блоком управления 6, поступают от первой 1 и второй 2 антенн соответственно на вход первого 4 и второго 5 приемоизмерительных блоков. В первом 4 и втором 5 приемоизмерительных блоках вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных синфазных сигналов, а в блоке 7 вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных сигналов по каждому расчетному направлению (pn=arcsin n/N, где n - порядковый номер расчетного направления (0, 1, 2...N) - (фиг.4).
Затем по командным импульсам, выработанным блоком управления 6, электрические сигналы, пропорциональные значениям вычисленных и измеренных временных задержек, поступают на вход вычислителя 8, в котором по программе определяются направления прихода отраженных синфазных сигналов и искомые глубины.
Синхронно с описанным процессом по командным импульсам, выработанным блоком управления 6, запускаются устройство коррекции 10 и устройство хронирования информации 11.
Устройство коррекции 10 предназначено для непосредственного измерения скорости звука на горизонте антенны 1 и представляет собой циклический скоростемер (см. например: Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги / Судостроение за рубежом, 1976, № 5, с.55-57), который представляет собой замкнутое через морскую воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями 13 и 14 (фиг.2), усилителем 16 и импульсным генератором 15, запускаемым по сигналам с выхода усилителя 16. Частота следования импульсов в кольце пропорциональна скорости звука в воде. В частотном дискриминаторе 17 эта частота следования сравнивается с частотой излучаемого антенной 1 сигнала, которая представляет собой гармонику сигнала в кольце. При изменении скорости звука в воде на выходе дискриминатора 17 появляется управляющее напряжение того или иного знака, изменяющее соответствующим образом частоту излучаемого антенной 1 сигнала. При этом автоматически поддерживается постоянной длина волны колебаний, излучаемых антенной 1.
Устройство хронирования информации 11 предназначено для обеспечения временной привязки измеряемой информации и его функционирование заключается в генерации тактовых импульсов посредством опорного генератора 20 (фиг.3), временном кодировании указанных импульсов в кодировщике 23 и записи временного кода посредством регистратора 27 параллельно с записью поступающей информации в вычислитель 8. Кроме того, отдельно генерируют тактовые импульсы посредством дополнительного генератора 21, температурная зависимость частоты которого выше по сравнению с опорным генератором 20, при этом периодически определяют разницу количества импульсов опорного и дополнительного генераторов за выбранную единицу временного кодирования и запоминают разницу К с привязкой относительно автономного времени tg, после чего определяют частоту опорного генератора по
формуле  , где f0 - наперед заданная постоянная составляющая частоты (номинальная частота) опорного генератора, при этом зависимость fg от К определяют до и после проведения измерений, что позволяет уменьшить погрешность временной привязки при измерениях.
, где f0 - наперед заданная постоянная составляющая частоты (номинальная частота) опорного генератора, при этом зависимость fg от К определяют до и после проведения измерений, что позволяет уменьшить погрешность временной привязки при измерениях.
В процессе выполнения измерений посредством блока датчиков 12 измерения линейных и угловых скоростей и ускорений, установленных на корпусе антенн 1 и 2 определяют значения указанных величин непосредственно в месте установки антенн 1 и 1, которые транслируются на вычислитель 8, на который также поступают значения угла сноса, курса, скорости и углов качки носителя антенн, которые учитываются при получении конечных результатов.
В вычислителе 8 в ПЗУ хранятся данные с характеристиками рельефа дна, полученные при предыдущих измерениях, и коэффициенты рассеивания звука дном, зависящие от типа грунта (скалистый, галечный, крупный и мелкий песок, илистый), что при выполнении разноглубинного накапливания информации при фиксированной средней точке на ровной поверхности дна с последующим определением точек на профиле дна с резко выраженными неровностями позволяет выполнить распознавание морского грунта посредством метода кластеризации и численного анализа с высокой степенью достоверности в отличие от известных способов определения глубины и характера рельефа дна и устройств для их осуществления.
Реализация заявляемого технического решения технической трудности не представляет, так как устройство для реализации способа включает стандартные измерительные элементы, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности ''промышленная применимость''.
Источники информации.
1. Старожицкий В.В. Новое в развитии зарубежных промерных эхолотов / Записки по гидрографии. С-Пб: Главное управление навигации и океанографии МО РФ, 1999, № 248, с.91-101.
2. Авторское свидетельство СССР № 989504.
3. Авторское свидетельство СССР № 1103171.
4. Патент US № 3478303.
5. Патент RU № 2045081 C1.
6. Судостроение за рубежом. Л.: ЦНИИ ''Румб'', 1978, №, с.76-90.
7. Stubbs А.К. Telesounding a method of wide swathe a depth measurement / International Hydrographic Review, 1974, v.51, № 1, p.23-59.
8. Авторское свидетельство СССР № 1829019 А1.
9. Завгородний В.Н. О влиянии погрешности ориентации и глубины погружения буксируемого подводного аппарата на точность съемки рельефа дна / Записки по гидрографии. С-Пб: Главное управление навигации и гидрографии МО РФ, 2001, № 253, с.33-38.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления | 1991 |
|
SU1829019A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2573626C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
Заявленное изобретение относится к области геофизики и может быть использовано для проведения мониторинга на морях и океанах. Заявлен способ определения глубин акватории, согласно которому излучают гидроакустические сигналы фазовым гидролокатором бокового обзора и принимают отражение сигнала в двух точках, расположенных по вертикали на заданном расстоянии. Измерение времени задержки синфазных сигналов по вертикали, в том числе и отраженных от ровной поверхности дна, осуществляют по каждому расчетному направлению. Определяют по полученным данным направления прихода синфазных сигналов и искомых глубин и распознают морской грунт. Дополнительно измеряют изменение скорости звука непосредственно на горизонте антенны, по значениям которых вводят корректирующие сигналы. Определяют угол сноса носителя антенн, линейные и угловые скорости и ускорения непосредственно на корпусе антенн. Вводят поправку временного кода, определяемого за время измерений. Распознавание морского грунта выполняют методом кластеризации и численного анализа. Устройство для реализации данного способа содержит антенны, передающий блок, приемоизмерительный блок, блок управления, вычислитель, регистратор, устройство коррекции, устройство хронирования информации, а также блок датчиков измерения линейных и угловых скоростей и ускорений. Технический результат: повышение достоверности определения глубин и распознавания грунта. 2 н.п. ф-лы, 4 ил.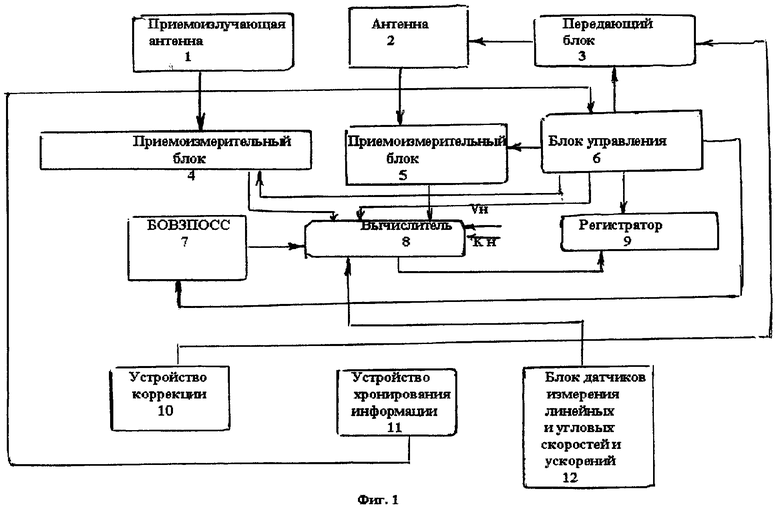
| ЭХОЛОКАТОР ДЛЯ РАСПОЗНАВАНИЯ МОРСКИХ ГРУНТОВ | 1992 |
|
RU2045081C1 |
| Устройство для распознавания подводных грунтов | 1981 |
|
SU989504A1 |
| Устройство для распознавания подводных грунтов | 1982 |
|
SU1103171A2 |
| US 3478303 А, 11.11.1969. | |||

