Область техники, к которой относится изобретение
Настоящее изобретение относится к способу увеличения продолжительности действия автоматической функции свободного хода у транспортного средства, оснащенного двигателем внутреннего сгорания, трансмиссией и системой автоматического поддержания скорости («круиз-контроль»).
Настоящее изобретение также относится к машиночитаемому носителю данных с компьютерной программой и компьютерному программному продукту, в обоих случаях рассчитанных на применение в компьютере для выполнения упомянутого способа.
Уровень техники
Автоматическая трансмиссия на основе планетарных зубчатых колес обычно имеет расположенные между планетарными зубчатыми колесами односторонние муфты, которые при приведении в действие тягового двигателя фиксируются в автоматическом положении для передачи крутящего момента от двигателя ведущим колесам, но, если крутящий момент передается в противоположном направлении, т.е. при нулевом газе и во время движения транспортного средства, они выключаются и позволяют транспортному средству двигаться свободным ходом без торможения двигателем, что за счет использования кинетической энергии автомобиля обеспечивает меньший расхода топлива, чем при торможении двигателем.
Соответствующая функция свободного хода автоматических механических трансмиссий (АМТ) описана в заявке WO 2002/092378. Функцию свободного хода в ней обеспечивают путем установки разъемного зубчатого колеса трансмиссии в нейтральное положение, когда педаль акселератора транспортного средства находится в заданном диапазоне углов поворота, который начинается на определенном расстоянии от исходного положения педали и проходит на протяжении небольшого угла в пределах общего угла поворота педали. Когда водитель желает изменить режим вождения и перейти с привода от двигателя на свободный ход без торможения двигателем, он ослабляет давление на педаль акселератора, чтобы она достигла заданного диапазона, в котором выключается привод от двигателя. Если необходимо торможение двигателем, он еще больше ослабляет давление на педаль акселератора до конца или в любом случае до тех пор, пока она не войдет в заданный диапазон, в котором происходит выключение.
Другой пример известной из уровня техники функции свободного хода описан в заявке WO 2005/084995. Функция свободного хода автоматически приводится в действие при наличии предварительно заданного условия движения транспортного средства. Этим условием является по меньшей мере движение вниз по не слишком крутому склону и отсутствие расхода топлива водителем (посредством педали акселератора) или системой автоматического поддержания скорости транспортного средства. Если функция свободного хода приведена в действие при определенной заданной скорости транспортного средства, т.е. в то время, когда действует система автоматического поддержания скорости, и превышена определенная предельная завышенная скорость (Vпредел.задан), функция свободного хода автоматически выключается, и скорость транспортного средства автоматически снижается до уровня ниже упомянутой предельной скорости Vпредел.задан. Когда скорость транспортного средства становится ниже предельной скорости Vпредел.задан, функция свободного хода снова включается при условии, что еще действуют соответствующие условия движения.
В WO 2005/084995 описано, что упомянутую предельную скорость Vпредел.задан можно автоматически корректировать в зависимости по меньшей мере от текущего уклона дороги.
В WO 2005/084995 дополнительно описано, что упомянутую предельную скорость Vпредел.задан можно автоматически корректировать в зависимости от уклона дороги в ближайшем будущем, например в зависимости от того, закончится ли в ближайшем будущем текущий спуск по склону, что означает увеличение Vпредел.задан с тем, чтобы отложить выключение функции свободного хода.
На некоторых спусках, когда сопротивление транспортного средства движению приблизительно равно нолю, известные из уровня техники устройства не приводят в действие функцию свободного хода, поскольку при определенной заданной скорости транспортного средства прогнозируемая (расчетная) продолжительность свободного хода слишком мала, то есть известному из уровня техники устройству необходим спуск с меньшим сопротивлением движению (на практике более крутой спуск), чтобы привести в действие функцию свободного хода.
Функция свободного хода не может быть приведена в действие на протяжении слишком короткого периода времени из-за потерь топлива. Другой причиной не приводить в действие функцию свободного хода на протяжении слишком короткого периода времени является снижение в таком случае комфортности хода. Когда сопротивление движению приблизительно равно нолю, в известных из уровня техники устройствах используется гистерезис, что означает, что транспортное средство должно ускориться (предпочтительно без впрыска топлива) до скорости, немного превышающей заданную скорость, прежде чем функция свободного хода снова может быть приведена в действие. Тем самым обеспечивается достаточная продолжительность свободного хода.
В основу настоящего изобретения положена задача создания способа дополнительного увеличения продолжительности свободного хода с целью еще большей экономии топлива и без снижения комфортности хода.
Краткое изложение сущности изобретения
В изобретении предложен способ увеличения продолжительности действия свободного хода во время действия системы автоматического поддержания скорости. За счет увеличения продолжительности свободного хода экономится больше топлива. Изобретение в особенности выгодно/эффективно на спусках с относительно малым уклоном, т.е. когда сопротивление движению приблизительно равно нолю.
Упомянутая задача решена путем варьирования области скоростей, в пределах которой разрешено приводить в действие функцию свободного хода. Это может быть выполнено посредством способа, в котором упомянутая функция представляет собой средство (содержит, но необязательно ограничена средством) для определения первой заданной скорости транспортного средства (далее - автомобиля), на которой разрешено приводить в действие упомянутую функцию по меньшей мере при преобладающих условиях. Этот предложенный в изобретении способ отличается тем, что осуществляют шаги, на которых:
рассчитывают допустимое заданное падение скорости автомобиля до величины пониженной скорости ниже упомянутой первой заданной скорости автомобиля по меньшей мере при преобладающих условиях, и
исходя из упомянутой величины пониженной скорости, управляют упомянутой функцией, чтобы увеличить продолжительность действия упомянутой функции.
Таким образом, продолжительность действия функции свободного хода увеличивают за счет того, что допускают определенное заданное падение скорости автомобиля ниже упомянутой первой заданной скорости автомобиля перед управлением функцией свободного хода. В одном из вариантов осуществления изобретения упомянутое управление включает стадию, на которой упомянутую функцию свободного хода выключают, когда скорость автомобиля снижается со скорости, превышающей упомянутую пониженную скорость, до упомянутой первой величины пониженной скорости. В другом варианте осуществления изобретения упомянутое управление включает стадию, на которой упомянутую функцию свободного хода приводят в действие, когда скорость автомобиля увеличивается со скорости ниже упомянутой величины пониженной скорости до упомянутой первой пониженной скорости. Таким образом, если скорость автомобиля приближается к пониженной скорости вследствие торможения и функция свободного хода в это время приведена в действие, она будет выключена после достижения пониженной скорости. С другой стороны, если скорость автомобиля приближается к пониженной скорости вследствие ускорения, т.е. функция свободного хода в настоящее время выключена, она будет включена после достижения пониженной скорости.
В одном из вариантов осуществления изобретения такой же результат можно получить путем простого превращения первой заданной скорости автомобиля во вторую заданную скорость автомобиля с меньшей величиной, чтобы упомянутая вторая заданная скорость автомобиля была по своим функциональным возможностям равнозначна упомянутой величине пониженной скорости автомобиля.
В одном из вариантов осуществления изобретения определение величины допустимого заданного падения скорости автомобиля до упомянутой величины пониженной скорости ниже упомянутой первой заданной скорости автомобиля зависит от возможностей автомобиля ускоряться с упомянутой величины пониженной скорости до упомянутой первой заданной скорости в течение заданного подходящего времени. Таким образом, допустимое падение скорости автомобиля можно адаптировать к существующей нагрузке на автомобиль и доступной тяговой мощности.
В другом варианте осуществления изобретения упомянутое заданное падение скорости автомобиля ниже упомянутой первой заданной скорости не произойдет, если ожидается, что в ближайшем будущем автомобиль встретит повышенное сопротивление движению, например подъем в гору. Преимущество этого варианта осуществления состоит в улучшенном поддержании средней скорости автомобиля, а также в большинстве случае в меньшем общем потреблении топлива.
В одном из дополнительных вариантов осуществления значение упомянутой величины пониженной скорости автомобиля будет не меньше величины, соответствующей высшей передаче трансмиссии автомобиля или передаче, включенной непосредственно перед приведением в действие функции свободного хода, при этом она может быть повторно включена после достижения скоростью автомобиля упомянутой величины пониженной скорости, когда выключится функция свободного хода и потребуется включить передачу.
В одном из дополнительных вариантов осуществления величина пониженной скорости автомобиля может быть вручную установлена водителем в качестве по меньшей мере одной первой заданной скорости автомобиля.
В другом варианте осуществления изобретения величина пониженной скорости автомобиля может быть установлена изготовителем или персоналом уполномоченной мастерской в качестве одной или нескольких различных первых заданных скоростей автомобиля.
В одном из дополнительных вариантов осуществления, когда автомобиль движется со скоростью ниже упомянутой величины пониженной скорости автомобиля и функция свободного хода в это время выключена, функция свободного хода будет приведена в действие после достижения упомянутой величины пониженной скорости вследствие ускорения под действием силы тяжести. Это может произойти, например, при прохождении через вершину подъема.
Дополнительные выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Настоящее изобретение будет более подробно описано со ссылкой на сопровождающие его чертежи, на которых в качестве примеров показаны дополнительные предпочтительнее варианты осуществления изобретения, а также технические предпосылки и на которых:
на фиг.1 и 2 схематически показано, как может быть увеличена продолжительность действия свободного хода согласно различным вариантам осуществления настоящего изобретения,
на фиг.3 - пример компьютерного обеспечения для осуществления изобретения.
Осуществление изобретения
В одном из вариантов осуществления изобретения автомобиль имеет двигательный агрегат, выходной вал которого соединен с ведомыми колесами автомобиля посредством трансмиссии, служащей для изменения передаточного отношения между упомянутым двигательным агрегатом и упомянутыми ведомыми колесами. Двигательный агрегат может представлять собой двигатель внутреннего сгорания или комбинированный агрегат, состоящий, например, из двигателя внутреннего сгорания и электрического двигателя/генератора. Трансмиссия может представлять собой ступенчатую трансмиссию, например, АМТ или трансмиссию с двумя сцеплениями с функцией свободного хода, позволяющей автомобилю двигаться в режиме свободного хода при определенных заданных условиях с целью экономии топлива, как упомянуто выше и известно из уровня техники.
Двигательный агрегат и трансмиссии образуют цепь привода автомобиля. Цепь привода предпочтительно имеет один или несколько блоков управления для управления различными функциями цепи привода, как это известно из уровня техники. Автомобиль также имеет систему автоматического поддержания скорости, которая как таковая известна из уровня техники. Согласно изобретению функция свободного хода предпочтительно действует в то время, когда действует система автоматического поддержания скорости.
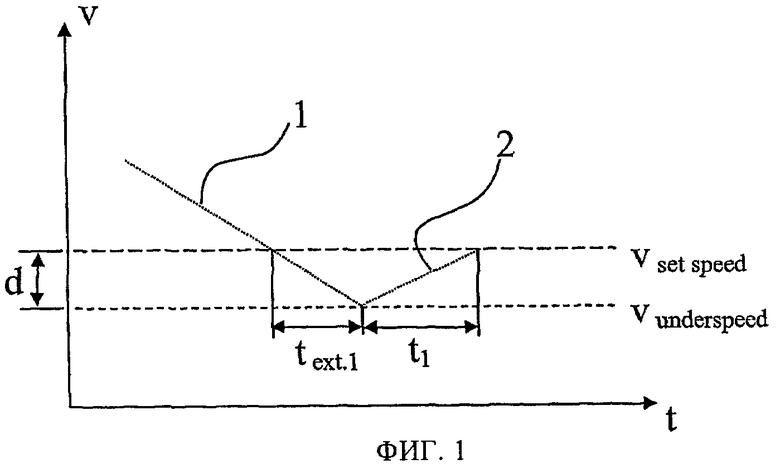
Один из блоков управления может быть запрограммирован определять первую заданную скорость Vзадан автомобиля, при которой разрешено приводить в действие упомянутую функцию по меньшей мере при преобладающих условиях движения автомобиля. Предпочтительно упомянутой Vзадан также может являться скорость, заданная для системы автоматического поддержания скорости. На фиг.1 показана диаграмма, на которой по оси y отложена скорость автомобиля v, а по оси х отложено время. Упомянутая первая заданная скорость Vзадан (Vset speed) автомобиля представлена в виде горизонтальной пунктирной линии при выбранной скорости автомобиля. Это известно из уровня техники и обеспечивается с помощью средства для определения упомянутой первой заданной скорости автомобиля. Как отмечено выше в связи с WO 2005/084995, функция свободного хода может дополнительно предусматривать максимально допустимую скорость Vпредел.задан автомобиля в режиме свободного хода (заданная стабилизированная скорость торможения, не показанная на чертежах). Следует отметить, что функция, предусматривающая Vпредел.задан и описанная в WO 2005/084995, не является обязательной в вариантах осуществления настоящего изобретения, но может служить полезным дополнением.
Согласно изобретению блок управления дополнительно запрограммирован рассчитывать допустимое заданное падение скорости автомобиля до первой величины пониженной скорости Vпониж (Vunderspeed) ниже упомянутой первой заданной скорости Vзадан автомобиля по меньшей мере при заданных условиях движения автомобиля, при этом блок управления дополнительно запрограммирован осуществлять управление упомянутой функцией свободного хода, исходя из упомянутой величины пониженной скорости. Эффектом является увеличение продолжительности действия упомянутой функции свободного хода. На фиг.1 позицией text.1 обозначена увеличенная продолжительность действия свободного хода, что представляет собой полезное усовершенствование известного уровня техники, предложенное в настоящем изобретении. Величина пониженной скорости Vпониж представлена на фиг.1 в виде горизонтальной пунктирной линии ниже упомянутой первой заданной скорости автомобиля. Когда функция свободного хода приведена в действие, а сопротивление автомобиля движению таково, что скорость автомобиля снижается, как это показано кривой 1 на фиг.1, упомянутый блок управления согласно изобретению запрограммирован допускать заданное падение d скорости автомобиля до упомянутой Vпониж. Когда скорость автомобиля, обозначенная кривой 1, достигает скорости Vпониж, блок управления запрограммирован инициировать регулирующее действие, которое в условиях замедления скорости автомобиля при действующей функции свободного хода представляет собой по меньшей мере стадию выключения упомянутой функции свободного хода. Выключение функции свободного хода означает включение определенной передачи трансмиссии и включение двигательного агрегата с возможностью передачи приводного усилия на ведомые колеса. В одном из предпочтительных вариантов осуществления блок управления может быть запрограммирован путем регулирования цепи привода автоматически увеличивать скорость автомобиля по меньшей мере до упомянутой Vзадан, как это обозначено кривой 2 увеличения скорости автомобиля на фиг.1.
Разность d между упомянутыми Vзадан и Vпониж представляет собой упомянутое допустимое заданное падение скорости автомобиля. В одном из вариантов осуществления изобретения блок управления запрограммирован рассчитывать упомянутое допустимое заданное падение d скорости автомобиля (и тем самым Vпониж) в зависимости от возможностей автомобиля ускоряться с упомянутой первой величины пониженной скорости Vпониж до упомянутой первой заданной скорости Vзадан в течение заданного подходящего времени t1, как это показано на фиг.1 (смотри кривую 2). Если ожидается, что автомобиль встретит относительно высокое сопротивление движению, блок управления запрограммирован уменьшать максимально допустимое падение d скорости автомобиля путем увеличения Vпониж. Тем самым уменьшится время t1. Существует несколько различных известных из уровня техники способов расчета будущего сопротивления автомобиля движению.
В другом варианте осуществления изобретения блок управления может быть запрограммирован устанавливать разность d (или величину Vпониж), не допуская, чтобы скорость Vпониж была меньше величины, соответствующей высшей передаче упомянутой трансмиссии или передаче, включенной непосредственно перед приведением в действие функции свободного хода, при этом она может быть повторно включена после достижения скоростью автомобиля упомянутой величины Vпониж, когда выключится функция свободного хода и потребуется включить передачу. Этот способ определения значения величины Vпониж может сочетаться с упомянутым выше способом с использованием времени t1. В способе, обеспечивающем наивысшую скорость автомобиля, устанавливают величину Vпониж.
Помимо описанных выше вариантов осуществления, предусматривающих автоматическое установления Vпониж для определенной Vзадан и условий движения автомобиля, также возможны варианты осуществления изобретения, в которых Vпониж может быть установлена вручную водителем по меньшей мере для одной Vзадан. Это может быть сделано с помощью различного рода средств взаимодействия водителя и автомобиля для управления упомянутой функцией свободного хода, предусмотренной в автомобиле. В другом варианте осуществления изобретения величина Vпониж может быть установлена изготовителем для одной или нескольких различных Vзадан или установлена персоналом уполномоченной мастерской.
Согласно одному из вариантов осуществления изобретения упомянутое заданное падение d скорости автомобиля не произойдет, если ожидается, что автомобиль в ближайшем будущем встретит повышенное сопротивление движению. Прогнозирование будущего сопротивления движению может быть осуществлено, например, путем непрерывного контроля будущей топографии как при действующей, так и выключенной функции свободного хода.
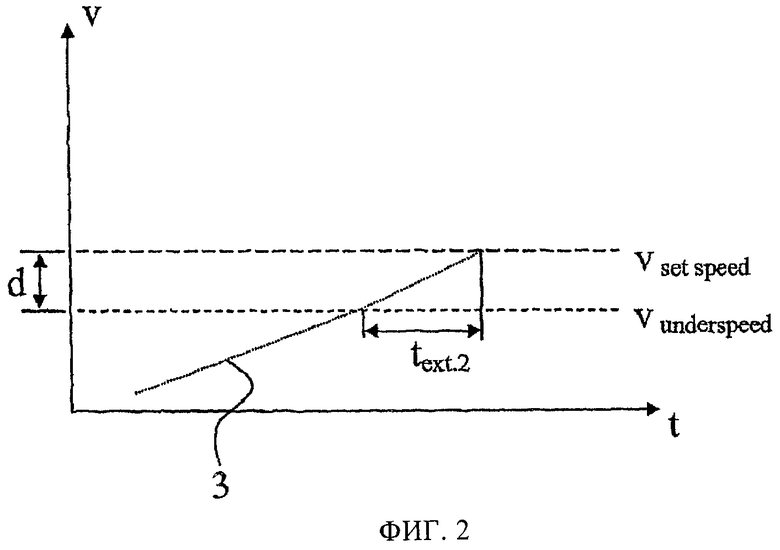
На фиг.2 показана та же диаграмма Vпониж и Vзадан, что и на фиг.1, при этом d на фиг.2 можно определить таким же способом, как в вариантах осуществления, рассмотренных выше со ссылкой на фиг.1. Единственное отличие состоит в том, что скорость автомобиля приближается к Vпониж снизу, а функция свободного хода перед моментом достижения Vпониж не включена, а выключена. На фиг.2 это отображено кривой 3 увеличения скорости автомобиля. Согласно одному из вариантов осуществления изобретения упомянутый блок управления запрограммирован осуществлять управление упомянутой функцией свободного хода, исходя из упомянутой величины пониженной скорости Vпониж, путем приведения в действие упомянутой функции, когда скорость автомобиля возрастает со скорости ниже Vпониж до упомянутой скорости Vпониж, как это обозначено кривой 3. Приведение в действие функции свободного хода инициируется, когда блок управления распознает определенное заданное условие движения автомобиля. Это условие наступает, когда автомобиль:
движется со скоростью ниже упомянутой скорости Vпониж,
функция свободного хода в это время выключена,
автомобиль проходит, например, через вершину подъема,
и согласно расчетам блока управления вследствие ускорения автомобиля под действием силы тяжести после прохождения вершины будет достигнута скорость Vпониж.
Таким образом, блок управления представляет собой известное из уровня техники средство расчета/распознавания будущей топологии (сопротивления движению) и вычисления будущей скорости автомобиля.
Основное преимущество, которое обеспечивают варианты осуществления, описанные со ссылкой на фиг.2, обозначено на фиг.2 позицией text.2, которая соответствует увеличенной продолжительности действия свободного хода, что представляет собой полезное усовершенствование известного уровня техники, предложенное в настоящем изобретении.
Что касается вариантов осуществления, поясненных посредством фиг.2, величина Vпониж в зависимости от определенной Vзадан может быть установлена таким же способом, как это описано выше при рассмотрении вариантов изобретения со ссылкой на фиг.1. В другом варианте осуществления изобретения упомянутая Vпониж может быть установлена в качестве второй заданной скорости автомобиля. Это может быть использовано во всех ранее упомянутых вариантах осуществления.
Во всех упомянутых вариантах осуществления изобретения блок управления может быть запрограммирован прогнозировать (рассчитывать) возможную будущую продолжительность свободного хода для определенной заданной скорости автомобиля. При этом может использоваться дополнительный параметр, чтобы определить, может ли быть приведена в действие упомянутая функция свободного хода. Предварительное вычисление возможной продолжительности свободного хода известно как таковое и упомянуто выше. Кроме того, в сочетании с описанными выше вариантами осуществления изобретения может использоваться также известная как таковая (упомянутая выше) основанная на гистерезисе функция, что означает, что автомобиль должен ускориться (предпочтительно без впрыска топлива) до скорости немного выше упомянутой величины пониженной скорости (или в качестве альтернативы заданной скорости автомобиля) прежде, чем может быть снова приведена в действие функция свободного хода. Тем самым обеспечивается достаточная продолжительность свободного хода.
Таким образом, как указано выше, подразумевается, что возможно несколько различных Vзадан, а также несколько различных Vпониж, соответственно установленных для нескольких Vзадан автоматически, вручную или обоими способами.
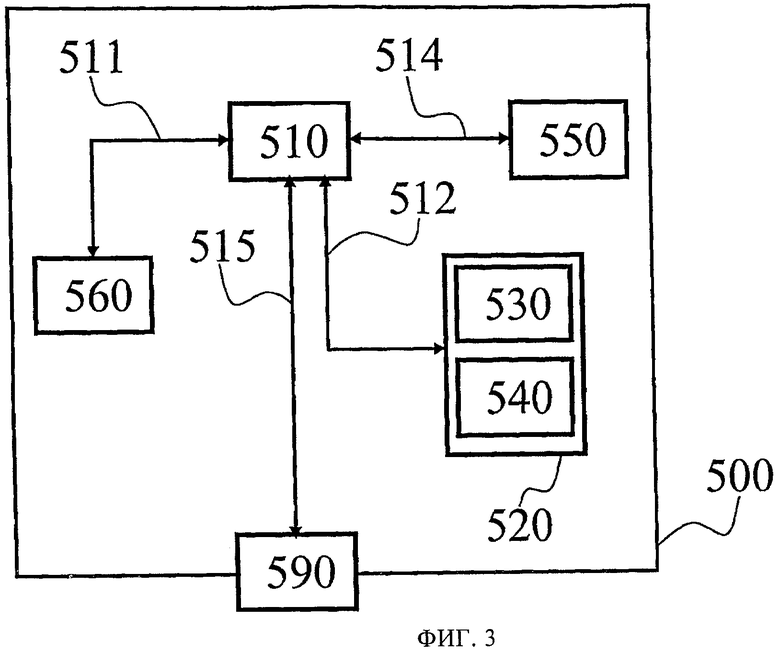
На фиг.3 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как упомянутый блок управления, в котором запрограммированы предложенные в изобретении функции. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления функцией свободного хода согласно изобретению. В одном из альтернативных вариантов осуществления программа управления функцией свободного хода хранится в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся в энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.
Изобретение относится к способу увеличения продолжительности действия автоматической функции свободного хода для транспортного средства. Способ включает установление первой заданной скорости транспортного средства, при которой функция свободного хода приводится в действие, расчет допустимого заданного падения скорости транспортного средства до первой величины пониженной скорости. Величина пониженной скорости ниже первой заданной скорости. Продолжительность действия функции свободного хода увеличивают в зависимости от величины пониженной скорости. Технический результат заключается в увеличении экономии топлива. 10 з.п. ф-лы, 3 ил.
1. Способ увеличения продолжительности действия автоматической функции свободного хода у транспортного средства, оснащенного системой автоматического поддержания скорости, во время такого автоматического поддержания его скорости, где упомянутая функция свободного хода обеспечивается средствами установления первой заданной скорости (Vзадан) транспортного средства, при которой эта функция может быть приведена в действие по меньшей мере при преобладающих условиях, отличающийся тем, что он включает шаги, на которых рассчитывают допустимое заданное падение (d) скорости транспортного средства до первой величины пониженной скорости (Vпониж) ниже упомянутой первой заданной скорости (Vзадан) транспортного средства по меньшей мере при преобладающих условиях и исходя из упомянутой величины пониженной скорости, управляют упомянутой функцией свободного хода, чтобы увеличить продолжительность ее действия.
2. Способ по п.1, отличающийся тем, что на упомянутом шаге управления отключают упомянутую функцию свободного хода, когда скорость транспортного средства снижается со скорости выше величины пониженной скорости (Vпониж) до упомянутой первой величины пониженной скорости (Vпониж), и упомянутая функция приведена в действие.
3. Способ по любому из предшествующих пунктов, отличающийся тем, что величина пониженной скорости (Vпониж) транспортного средства будет не меньше величины, соответствующей высшей передаче трансмиссии транспортного средства или передаче, включенной непосредственно перед приведением в действие функции свободного хода, при этом передача может быть повторно включена после достижения транспортным средством величины пониженной скорости (Vпониж), когда выключится функция свободного хода и потребуется включить передачу.
4. Способ по п.1, отличающийся тем, что упомянутое падение (d) заданной скорости транспортного средства не произойдет, если ожидается, что транспортное средство в ближайшем будущем встретит повышенное сопротивление движению.
5. Способ по п.3, отличающийся тем, что упомянутое падение (d) заданной скорости транспортного средства не произойдет, если ожидается, что транспортное средство в ближайшем будущем встретит повышенное сопротивление движению.
6. Способ по п.1, отличающийся тем, что на упомянутом шаге управления приводят в действие функцию свободного хода, когда скорость транспортного средства увеличивается со скорости ниже величины пониженной скорости (Vпониж) по меньшей мере до первой величины пониженной скорости (Vпониж) и упомянутая функция приведена в действие.
7. Способ по п.6, отличающийся тем, что основным фактором, способствующим увеличению упомянутой скорости транспортного средства, является сила тяжести.
8. Способ по п.1, отличающийся тем, что расчет величины упомянутого допустимого заданного падения (d) скорости транспортного средства зависит от возможностей транспортного средства в течение заданного подходящего времени (t1) ускоряться с упомянутой первой величины пониженной скорости (Vпониж) до первой заданной скорости (Vзадан).
9. Способ по п.1, отличающийся тем, что величина пониженной скорости (Vпониж) транспортного средства по меньшей мере для одной его первой заданной скорости (Vзадан) может быть вручную установлена водителем.
10. Способ по п.1, отличающийся тем, что величина пониженной скорости (Vпониж) транспортного средства для одной или нескольких различных первых его заданных скоростей (Vзадан) может быть установлена изготовителем или персоналом уполномоченной мастерской.
11. Способ по п.1, отличающийся тем, что первую величину пониженной скорости (Vпониж) устанавливают в качестве второй заданной скорости транспортного средства.
| US 2004176213 А1, 09.09.2004 | |||
| ПРОТОЧНЫЙ ТРАКТ ВОДОМЕТНОГО ДВИЖИТЕЛЯ | 1992 |
|
RU2092378C1 |
| WO 2005084995 A1, 15.09.2005 | |||
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |

