Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству управления выключением функции свободного хода транспортного средства.
Настоящее изобретение также относится к компьютерной программе, компьютерному программному продукту и запоминающей среде (машиночитаемому носителю), которые предназначены для применения в блоке управления для выполнения упомянутого способа.
Уровень техники
Автоматическая трансмиссия на основе планетарных зубчатых колес обычно имеет расположенные между планетарными зубчатыми колесами односторонние муфты, которые при приведении в действие тягового двигателя фиксируются в автоматическом положении для передачи крутящего момента от двигателя ведущим колесам, но, если крутящий момент передается в противоположном направлении, т.е. при нулевом газе и во время движения транспортного средства, они выключаются и позволяют транспортному средству двигаться свободным ходом без торможения двигателем, что за счет использования кинетической энергии автомобиля обеспечивает меньший расхода топлива, чем при торможении двигателем.
Соответствующая функция свободного хода автоматических механических трансмиссий (АМТ) описана в заявке WO 2005/084995. Функция свободного хода автоматически приводится в действие при наличии предварительно заданного условия движения транспортного средства. Этим условием является по меньшей мере движение вниз по не слишком крутому склону и отсутствие расхода топлива водителем (посредством педали акселератора) или системой автоматического поддержания скорости транспортного средства. Если функция свободного хода приведена в действие при определенной заданной скорости транспортного средства, т.е. в то время, когда действует система автоматического поддержания скорости, и превышена определенная предельная завышенная скорость (Vпредел.задан), функция свободного хода автоматически выключается, и скорость транспортного средства автоматически снижается до уровня, ниже упомянутой предельной скорости Vпредел.задан. Когда скорость транспортного средства становится ниже предельной скорости Vпредел.задан, функция свободного хода снова включается при условии, что еще действуют соответствующие условия движения.
В WO 2005/084995 дополнительно описано, что упомянутую предельную скорость Vпредел.задан можно автоматически корректировать в зависимости от уклона дороги в ближайшем будущем, например, в зависимости от того, закончится ли в ближайшем будущем текущий спуск по склону, что означает увеличение Vпредел.задан с тем, чтобы отложить выключение функции свободного хода.
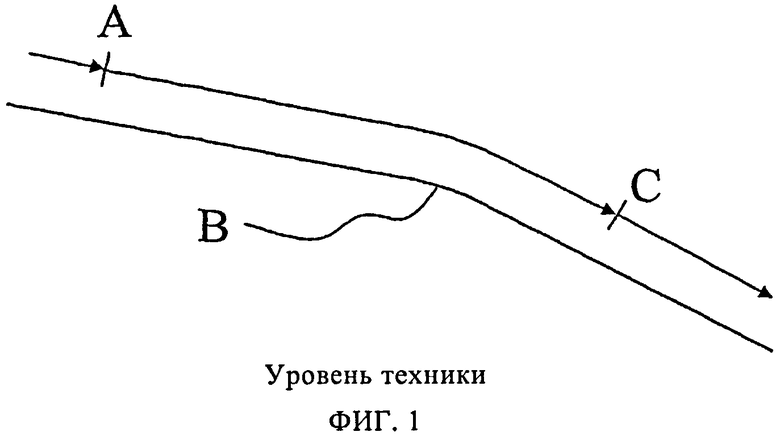
На фиг.1 проиллюстрировано включение и выключение функции свободного хода при движении по умеренному склону, который вскоре становится крутым (положение В внизу). Согласно известному уровню техники (смотри фиг.1), если сопротивление транспортного средства движению становится меньше ноля (на умеренном склоне), упомянутая функция свободного хода включается, когда транспортное средство находится в положении А. Если упомянутый умеренный склон становится крутым (положение В вниз), транспортное средство быстро набирает скорость и при превышении упомянутой предельной завышенной скорости (Vпредел.задан) в положении С функция свободного хода автоматически выключается, и скорость транспортного средства автоматически снижается (из положения С вниз) до уровня, ниже упомянутой предельной скорости Vпредел.задан.
В основу настоящего изобретения положена техническая задача создания способа дополнительного снижения потребления топлива в транспортном средстве, которое оснащено функцией свободного хода.
Раскрытие изобретения
Упомянутая задача решена за счет выключения функции свободного хода при нахождении транспортного средства (далее - автомобиля) в соответствующем положении. Это может быть выполнено посредством способа, осуществление которого начинается с момента, когда вследствие преобладающих условий свободного хода приводится в действие функция свободного хода автомобиля. Этот предложенный в изобретении способ отличается тем, что включает шаги, на которых:
прогнозируют, что автомобиль вскоре будет двигаться по крутому спуску по склону, который является более крутым по сравнению с текущим спуском по склону,
моделируют условия, чтобы установить, снизится ли потребление топлива, если упомянутая функция свободного хода будет выключена до того, как автомобиль достигнет упомянутого более крутого спуска по склону, по сравнению с тем, когда автомобиль достигает более крутого спуска по склону при включенной функции свободного хода,
выключают функцию свободного хода до того, как автомобиль достигает более крутого спуска по склону, если результаты моделирования указывают, что потребление топлива снизится.
В одном из вариантов осуществления изобретения скорость автомобиля начинает снижаться до достижения более крутого спуска по склону при выключенной функции свободного хода. В одном из дополнительных вариантов осуществления изобретения выключение функции свободного хода предусматривает включение двигателя внутреннего сгорания с возможностью передачи приводного усилия на трансмиссию и ведущие колеса автомобиля. В еще одном дополнительном варианте осуществления изобретения снижение скорости автомобиля осуществляется торможением автомобиля при помощи устройства торможения двигателем и(или) вспомогательного тормозного устройства.
В другом варианте осуществления изобретения моделирование условий также может включать моделирование изменения скорости автомобиля с использованием различных необязательных зубчатых колес трансмиссии и выбор одного зубчатого колеса, которое обеспечивает наименьшее изменение скорости автомобиля.
Устройство управления автоматическим свободным ходом применимо в автомобиле, который имеет двигатель, автоматическую механическую трансмиссию, ведущие колеса, устройство свободного хода и блок управления двигателем, который приводит в действие ведущие колеса посредством автоматической механической трансмиссии, а устройством свободного хода, двигателем и автоматической механической трансмиссией управляет блок управления, который рассчитан на выполнение описанных шагов способа.
Дополнительные выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения, следующих за п.1.
Краткое описание чертежей
Настоящее изобретение будет более подробно описано со ссылкой на сопровождающие его чертежи, на которых в качестве примеров показаны дополнительные предпочтительнее варианты осуществления изобретения, а также технические предпосылки, и на которых:
на фиг.1 показаны склон и положения для включения и выключения функции свободного хода согласно известному уровню техники.
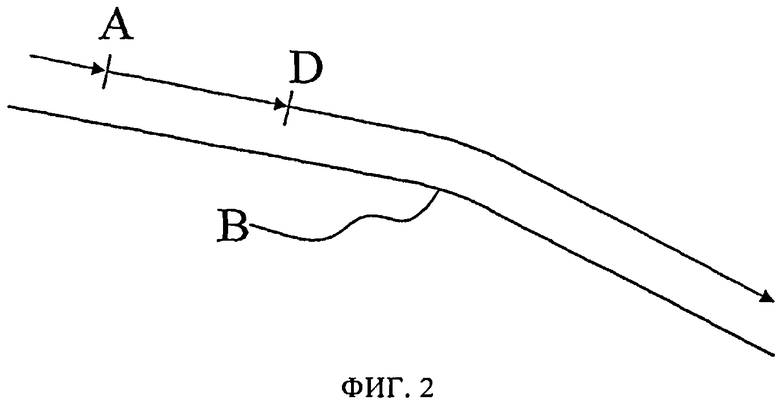
на фиг.2 - такой же склон, но с положениями для включения и выключения функции свободного хода согласно настоящему изобретению.
на фиг.3 - пример компьютерного обеспечения для осуществления изобретения.
Осуществление изобретения
В одном из вариантов осуществления изобретения автомобиль имеет двигательный агрегат, выходной вал которого соединен с ведущими колесами автомобиля посредством трансмиссии, служащей для изменения передаточного отношения между упомянутым двигательным агрегатом и упомянутыми ведущими колесами. Двигательный агрегат может представлять собой двигатель внутреннего сгорания или комбинированный агрегат, состоящий, например, из двигателя внутреннего сгорания и электрического двигателя/генератора. Трансмиссия может представлять собой ступенчатую трансмиссию, например, АМТ или трансмиссию с двумя сцеплениями с функцией свободного хода, позволяющей автомобилю двигаться в режиме свободного хода при определенных заданных условиях с целью экономии топлива, как упомянуто выше и известно из уровня техники. Двигательный агрегат и трансмиссия образуют цепь привода автомобиля. Цепь привода предпочтительно имеет один или несколько блоков управления различными функциями цепи привода, как известно из уровня техники. Автомобиль также имеет систему автоматического поддержания скорости, которая как таковая известна из уровня техники, в состав которой может быть включена функция свободного хода. Функция свободного хода может быть применена в то время, когда действует система автоматического поддержания скорости.
Согласно одному из вариантов осуществления изобретения блок управления, который, например, содержит систему автоматического поддержания скорости, запрограммирован включать функцию свободного ход вследствие преобладающих условий свободного хода, например, когда автомобиль находится в положении А, как показано на фиг.1. Соответственно, автомобиль начинает движение в режиме свободного хода в положении А. Эта процедура включения функции свободного хода, как таковая известна из уровня техники (описанного выше). На фиг.2 представлен такой же склон, как и на фиг.1. Упомянутое положение А является одинаковым на обеих фигурах. Таким образом, на фиг.2 также показано, что автомобиль начинает движение в режиме свободного хода в положении А. Далее будет описано, что происходит согласно изобретению при движении по склону ниже положения А на фиг.2.
В упомянутом варианте осуществления изобретения после включения функции свободного хода блок управления запрограммирован:
прогнозировать, что упомянутое транспортное средство вскоре будет двигаться по крутому спуску по склону (ниже положения В на фиг.2), который является более крутым по сравнению с текущим спуском по склону,
моделировать условия, чтобы установить, снизится ли потребление топлива, если упомянутая функция свободного хода будет выключена в положении D (расположенном выше упомянутого положения В) до того, как автомобиль достигнет упомянутого более крутого спуска по склону, по сравнению с тем, когда автомобиль достигает более крутого спуска по склону при включенной функции свободного хода,
выключать функцию свободного хода в положении D, то есть до того, как автомобиль достигает более крутого спуска по склону, если результаты моделирования указывают, что потребление топлива снизится.
Упомянутое прогнозирование того, что автомобиль вскоре будет двигаться по крутому спуску по склону, может осуществляться известным из техники способом с использованием информации, например, из электронной карты и системы определения местоположения автомобиля (например, глобальной системы определения местоположения) или устройства для определения маршрута в сочетании с системой определения местоположения автомобиля.
Упомянутое моделирование условий осуществляют с использованием преобладающих значений параметров автомобиля, таких как скорость автомобиля, ускорение автомобиля, общий вес автомобиля, уклон дороги (в текущем и последующих положениях автомобиля) и параметров, значения которых могут регулироваться во время движения автомобиля, таких как, различные положения выключения функции свободного хода (например, различные положения автомобиля между положениями А и С). При каждом моделировании условий рассчитывают потребление топлива. Упомянутый блок управления может быть запрограммирован выбирать значения параметра из моделируемых условий с самым низким потреблением топлива и соответствующим образом управлять свободным ходом. Например, если согласно моделируемым условиям самое низкое потребление топлива будет достигнуто при выключении функции свободного хода в положении D (как показано на фиг.2), блок управления выключит функцию свободного хода, когда автомобиль достигнет положения D.
Соответственно, назначение изобретения состоит в том, чтобы рассчитать, уменьшится ли потребление топлива при выключении функции свободного хода до достижения положения С и даже положения В. Таким образом, выгода, которую обеспечивает изобретение, заключается в уменьшенном потреблении топлива и более разумном использовании преобладающих условий движения автомобиля, в частности, рельефа дороги.
Как описано выше и известно из уровня техники, блок управления в любом случае выключает функцию свободного хода, если в положении С превышена предельная завышенная скорость (Vпредел.задан).
Согласно одному из вариантов осуществления изобретения выключение функции свободного хода состоит в том, что блок управления запрограммирован включать двигатель внутреннего сгорания автомобиля с возможностью передачи приводного усилия на трансмиссию и ведущие колеса автомобиля. Это может осуществляться известным из техники путем.
Согласно одному из дополнительных вариантов осуществления изобретения блок управления также может быть запрограммирован начинать снижение скорости до достижения спуска по склону и после выключения функции свободного хода. Это означает, что блок управления может быть запрограммирован на инициацию тормозного момента между положениями D и В с помощью рабочего тормоза и(или) вспомогательного тормозного устройства, одним или обоими из которых может быть оснащен автомобиль. Положение инициации тормозного момента, величина тормозного момента и регулировка тормозного момента во время движения автомобиля могут моделироваться с целью достижения, например, заданной скорости автомобиля в каком-либо положении при дальнейшем движении по дороге. Тормозной момент может достигаться с помощью тормозного устройства и(или) рабочего тормоза и(или) вспомогательного тормозного устройства, при этом одним, двумя или всеми из которых может быть оснащен автомобиль, как известно из техники.
Согласно другому варианту осуществления изобретения блок управления также может быть запрограммирован моделировать изменение скорости автомобиля при включении различных возможных передач трансмиссии и выбирать одну передачу, которая обеспечивает наименьшее изменение скорости автомобиля. Включение выбранной передачи может быть связано с выключением функции свободного хода в положении D. Соответственно, выбирается лучшая передача для торможения двигателем и(или) вспомогательным тормозным устройством, обеспечивающая соответствующий тормозной момент.
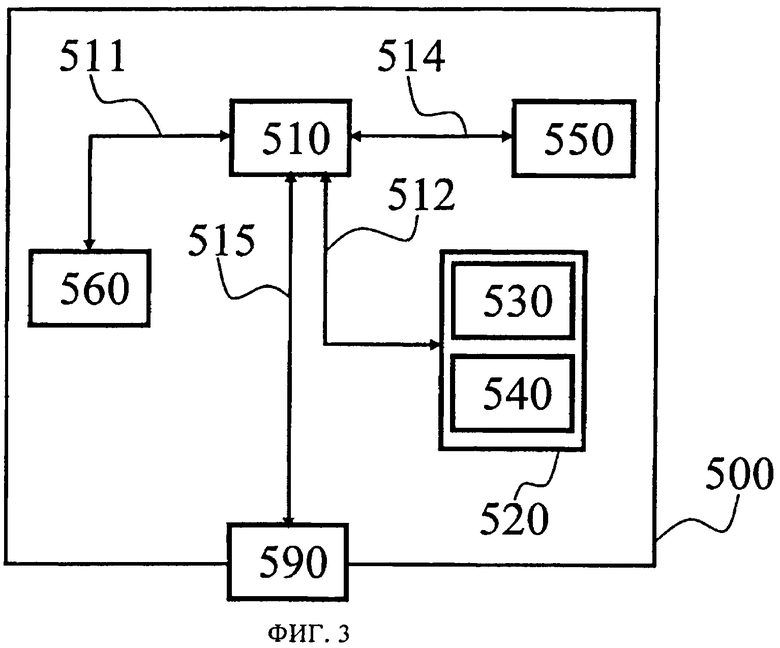
На фиг.3 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как упомянутый блок управления, в котором запрограммированы предложенные в изобретении функции. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления функцией свободного хода согласно изобретению. В одном из альтернативных вариантов осуществления программа управления функцией свободного хода хранится в отдельной энергонезависимой запоминающей среде 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся в энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.
Группа изобретений относится к способу управления автоматической функцией свободного хода транспортного средства и транспортному средству. Способ включает прогнозирование того, что транспортное средство вскоре будет двигаться по крутому спуску по склону, моделирование условий, чтобы установить, снизится ли потребление топлива, если функция свободного хода будет выключена до того, как транспортное средство достигнет более крутого спуска по склону, по сравнению с тем, когда транспортное средство достигает более крутого спуска по склону при включенной функции свободного хода, выключение функции свободного хода до того, как транспортное средство достигает более крутого спуска по склону, если потребление топлива снизится. Транспортное средство содержит двигатель, автоматическую механическую трансмиссию, ведущие колеса с приводом от двигателя, устройство свободного хода и блок управления двигателем. Двигатель выполнен с возможностью привода в действие ведущих колес посредством автоматической механической трансмиссии. Блок управления выполнен с возможностью управления устройством свободного хода, двигателем и автоматической механической трансмиссией. Блок управления выполнен с возможностью осуществления операций вышеуказанного способа. Технический результат заключается в повышении топливной экономичности. 2 н. и 5 з.п. ф-лы, 3 ил.
1. Способ управления автоматической функцией свободного хода транспортного средства, которая приводится в действие вследствие преобладающих условий свободного хода, отличающийся тем, что он включает прогнозирование того, что транспортное средство вскоре будет двигаться по крутому спуску по склону, который является более крутым по сравнению с текущим спуском по склону, моделирование условий, чтобы установить, снизится ли потребление топлива, если упомянутая функция свободного хода будет выключена до того, как транспортное средство достигнет упомянутого более крутого спуска по склону, по сравнению с тем, когда транспортное средство достигает более крутого спуска по склону при включенной функции свободного хода, выключение функции свободного хода до того, как транспортное средство достигает более крутого спуска по склону, если результаты моделирования указывают, что потребление топлива снизится.
2. Способ по п.1, отличающийся тем, что при выключении функции свободного хода также начинает снижаться скорость транспортного средства до достижения более крутого спуска по склону.
3. Способ по п.2, отличающийся тем, при выключении функции свободного хода включается двигатель внутреннего сгорания для передачи приводного усилия на трансмиссию и ведущие колеса транспортного средства.
4. Способ по п.3, отличающийся тем, что снижение скорости транспортного средства осуществляют торможением транспортного средства с помощью устройства торможения двигателем.
5. Способ по п.4, отличающийся тем, что снижение скорости транспортного средства также осуществляют торможением транспортного средства с помощью вспомогательного тормозного устройства.
6. Способ по п.4 или 5, отличающийся тем, что при моделировании условий также моделируют изменение скорости транспортного средства при включенных различных возможных зубчатых колесах трансмиссии и выбирают одно зубчатое колесо, которое обеспечивает наименьшее изменение скорости автомобиля.
7. Транспортное средство, имеющее двигатель, автоматическую механическую трансмиссию, ведущие колеса с приводом от двигателя, устройство свободного хода и блок управления двигателем, причем двигатель выполнен с возможностью привода в действие ведущих колес посредством автоматической механической трансмиссии, а блок управления выполнен с возможностью управления устройством свободного хода, двигателем и автоматической механической трансмиссией, отличающееся тем, что блок управления выполнен с возможностью осуществления способа по любому из пп.1-6.
| US 2004138027 A1, 15.07.2004 | |||
| US 2006293824 A1, 28.12.2006 | |||
| ЦЕНТРОБЕЖНЫЙ КОНЦЕНТРАТОР | 2010 |
|
RU2452579C2 |
| RU 2001791 C1, 30.10.1993. | |||

