Область техники, к которой относится изобретение
Изобретение относится к способу управления системой автоматического поддержания скорости согласно преамбуле п.1 прилагаемой формулы изобретения. Изобретение также относится к системе автоматического поддержания скорости транспортного средства, предназначенной для такого способа управления системой автоматического поддержания скорости согласно преамбуле п.15 прилагаемой формулы изобретения.
Настоящее изобретение также относится к компьютерной программе, компьютерному программному продукту и запоминающей компьютерной среде, при этом все из перечисленного предназначено для применения с компьютером для осуществления упомянутого способа.
Уровень техники
Транспортные средства, такие как легковые, грузовые, буксирные автомобили и автобусы, часто оснащают так называемой системой автоматического поддержания скорости, также называемой автоматической системой поддержания заданной скорости для автоматического управления скоростью транспортного средства (круиз-контроль). Такая система автоматического поддержания скорости содержит определенное средство, такое как датчик скорости для контроля действительной скорости автомобиля. Система автоматического поддержания скорости сравнивает действительную скорость автомобиля с заданной скоростью. Заданная скорость, например, может быть введена в систему автоматического поддержания скорости в качестве преобладающей действительной скорости автомобиля при приведении в действие водителем переключателя настройки. Система автоматического поддержания скорости генерирует сигнал ошибки путем сравнения действительной скорости автомобиля с заданной скоростью. Сигнал ошибки затем используют, например, для управления исполнительным механизмом, связанным с топливным насосом или дроссельной заслонкой двигателя для изменения частоты вращения двигателя до тех пор, пока сигнал ошибки преимущественно не будет равен нулю, т.е. действительная скорость автомобиля не будет соответствовать заданной скорости.
В ЕР 1439976 и US 6990401 описаны два известных из уровня техники примера дополнительного усовершенствованных систем автоматического поддержания скорости. В данном случае система автоматического поддержания скорости является системой автоматического поддержания скорости с прогнозированием, в которой используются данные о текущем положении автомобиля и будущем рельефе дороги, например, величинах приближающегося уклона или подъема дороги с целью регулировки открытия дроссельной заслонки таким образом, чтобы повысить эффективность использования топлива.
В основу настоящего изобретения положена задача дополнительного усовершенствования такой системы автоматического поддержания скорости, в которой для управления скоростью автомобиля используются данные о текущем положении автомобиля и будущем рельефе дороги.
Краткое изложение сущности изобретения
Основной задачей настоящего изобретения является создание усовершенствованного способа управления системой автоматического поддержания скорости, позволяющего избегать ненужных ускорений в ситуациях, в которых для ускорения автомобиля и восстановления скорости транспортного средства (далее - автомобиля) в течение разумного времени нахождения автомобиля в пути может использоваться сила земного тяготения. Решение этой задачи достигнуто посредством упомянутого во вводной части способа, который охарактеризован в п.1. Решение задачи изобретения также достигнуто посредством упомянутой во вводной части системы, которая охарактеризована в п.15.
В изобретении предложен способ управления системой автоматического поддержания скорости автомобиля в процессе движения автомобиля. Способ включает стадии:
движения автомобиля с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости автомобиля,
определения первого положения автомобили при движении вверх по склону, когда в результате замедлении автомобиля скорость снижается до первой скорости, более низкой, чем заданная скорость, и замедление достигает нуля или автомобиль только начал ускорение для увеличения скорости до заданной скорости,
определения желательной скорости автомобиля во втором положении при спуске с вершины подъема на первом отрезке после преодоления вершины подъема,
исходя из желательной скорости автомобиля вычисления минимальной скорости на вершине подъема, с которой автомобиль должен преодолеть вершину подъема, чтобы достигнуть желательной скорости с минимальным или нулевым расходом топлива на первом отрезке,
управления скоростью автомобиля на втором отрезке между первым положением автомобиля и вершиной подъема, в результате чего автомобиль достигает минимальной скорости во время преодоления вершины подъема, и поддержания скорости автомобиля на втором отрезке, ниже заданной скорости.
Согласно первому альтернативному варианту осуществления настоящего изобретения вторым положением автомобиля является одно из следующего:
положение по истечении заданного времени нахождения в пути после преодоления вершины подъема,
положение на заданном расстоянии от вершины подъема,
положение в конце спуска,
положение на определенном расстоянии от вершины подъема, в котором сопротивление автомобиля движению меняется с отрицательного на положительное.
В одном из дополнительных вариантов осуществления способа предусмотрена дополнительная стадия вычисления необходимого ускорения или замедления автомобиля на втором отрезке с целью достижения минимальной скорости автомобиля на вершине подъема с минимальным расходом топлива на втором отрезке.
В другом варианте осуществления способа предусмотрены дополнительные стадии:
определения первой скорости автомобиля, являющейся несколько более низкой, чем скорость автомобиля при включенной прямой передаче,
после определения заданного состояния автомобиля установления минимальной скорости автомобиля, равной скорости автомобиля при включенной прямой передаче, и ускорения автомобиля до минимальной скорости автомобиля и включения прямой передачи,
движения автомобиля при включенной прямой передаче на остающемся участке второго отрезка.
В одном из дополнительных вариантов осуществления изобретения заданным состоянием автомобиля является по меньшей мере одно из следующего:
состояние при несколько (непосредственно) более низкой скорости, чем скорость при включенной прямой передаче, что означает разность менее 5 км/ч между скоростью при включенной прямой передаче и первой скоростью автомобиля,
состояние, когда длина второго отрезка превышает заданное значение,
состояние, когда расчетный временной интервал движения автомобиля при включенной прямой передаче на втором отрезке превышает заданное значение.
В другом варианте осуществления изобретения для системы автоматического поддержания скорости устанавливают максимальную завышенную скорость автомобиля, по меньшей мере равную заданной скорости автомобиля или превышающую ее, при этом желательная скорость автомобиля равна максимальной завышенной скорости автомобиля.
В другом варианте осуществления изобретения устанавливают минимальную заниженную скорость автомобиля, которая находится в предварительно заданном соотношении с заданной скоростью автомобиля. В одном из дополнительных вариантов осуществления предварительно заданным соотношением является одно из следующего:
минимальная заниженная скорость автомобиля составляет заранее установленный процент от заданной скорости автомобиля,
минимальная заниженная скорость является на заранее установленную величину меньшей, чем заданная скорость.
В одном из дополнительных вариантов осуществления изобретения вершина подъема, второе положение и минимальная скорость автомобиля прогнозируются, исходя из данных о текущем положении автомобиля и будущем дорожном рельефе подъема.
В одном из дополнительных вариантов осуществления изобретения предусмотрено, что, если длина второго отрезка является меньшей, чем заданное значение, устанавливается минимальная скорость автомобиля, равная первой скорости автомобиля.
Изобретение также относится к системе автоматического поддержания скорости автомобиля, в которую входят (включая без ограничения) блок управления, водительский интерфейс ввода, указатель положения автомобиля, указатель дорожного рельефа. Система отличается тем, что блок служит для выполнения упомянутых стадий способа и использования данных, поступающих от указателя положения автомобиля и указателя дорожного рельефа, для вычисления минимальной скорости автомобиля.
Дополнительные выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Настоящее изобретение будет более подробно описано со ссылкой на сопровождающие его чертежи, на которых в качестве примеров показаны дополнительные предпочтительные варианты осуществления изобретения, а также технические предпосылки, и на которых:
на фиг.1-3 схематически показаны диаграммы скорости автомобиля и соответствующие условия движения, при этом на диаграммах проиллюстрирована система автоматического поддержания скорости согласно различным вариантам осуществления изобретения.
На фиг.4 - применение изобретения с компьютерным устройством.
Описание осуществления изобретения
Системой автоматического поддержания скорости для автоматического управления скоростью автомобиля может быть оснащен известный из техники автомобиль. Система автоматического поддержания скорости имеет блок управления для непрерывной обработки входящих сигналов и доставки выходных сигналов, например, блоку управления движением для управления двигательным агрегатом и(или) блоку управления торможением для управления тормозными устройствами автомобиля с целью поддержания заданной скорости. Система автоматического поддержания скорости дополнительно содержит известные из техники, по меньшей мере водительский интерфейс ввода, указатель положения автомобиля и указатель дорожного рельефа по известному уровню техники. Блок управления служит для выполнения стадий описанных ниже функций согласно изобретению с использованием данных, поступающих от указателя положения автомобиля и указателя дорожного рельефа. Примерами указателя дорожного рельефа являются указатели маршрута и электронные карты.
На фиг.1 проиллюстрирован автомобиль 1, преодолевающий подъем 2. Система автоматического поддержания скорости установлена на режим поддержания заданной скорости Vзадан. Соответственно, блок управления в системе автоматического поддержания скорости обеспечивает поддержание заданной скорости Vзадан. Также установлена максимальная завышенная скорость Vзавыш автомобиля, чтобы блок управления инициировал торможение автомобиля, если скорость автомобиля приближается к завышенной скорости Vзавыш. Эта функция известна как таковая и также называется системой автоматического поддержания скорости автомобиля с функцией торможения. Для системы автоматического поддержания скорости может быть установлена максимальная завышенная скорость Vзавыш, по меньшей мере равная заданной скорости автомобиля или превышающая заданную скорость автомобиля. В проиллюстрированном примере завышенная скорость Vзавыш превышает заданную скорость Vзадан. Когда автомобиль начинает преодолевать подъем, скорость автомобиля преимущественно начинает снижаться от заданной скорости Vзадан вследствие уклона восходящего склона 3 и(или) высокой нагруженности автомобиля и(или) отсутствия тяговой мощности, несмотря на то, что двигательный агрегат автомобиля подает полную мощность во время преодоления подъема. Впоследствии уклон восходящего склона 3 начинает уменьшаться, и в определенном положении А замедление автомобиля снижается до нуля. Начиная с положения А и далее, подаваемой двигательным агрегатом полной мощности достаточно для того, чтобы автомобиль начал ускоряться. Соответственно, скорость автомобиля начинает увеличиваться в положении А. Положение А также указывает момент, когда автомобиль двигался с минимальной скоростью Vмин во время преодоления подъема 2. Согласно известному уровню техники и при отсутствии информации о приближающейся вершине подъема в положении В или о последующем нисходящем склоне 5 блок управления будет просто управлять двигательным агрегатом таким образом, чтобы как можно быстрее достигнуть заданной скорости Vзадан. Примером этой ситуации служит кривая 4 скорости. На кривой 4 скорости показано, что заданная скорость Vзадан достигается в определенный момент сразу после положения В. Поскольку после положения В автомобиль движется вниз, автомобиль дополнительно ускоряется вследствие уклона нисходящего склона 5 от заданной скорости Vзадан до завышенной скорости Vзавыш. Соответственно, блок управления инициирует торможение, чтобы не превысить завышенную скорость Vзавыш. Более эффективный с точки зрения использования топлива способ управления скоростью автомобиля во время преодоления подъема 2 проиллюстрирован на кривой 6. Чтобы управлять скоростью автомобиля согласно кривой 6, блок управления должен иметь доступ к данным о предстоящем маршруте, таким как в упомянутых примерах известного уровня техники ЕР 1439976 и US 6990401. В настоящем изобретении предложено дополнительное усовершенствование системы автоматического поддержания скорости с прогнозированием.
Как показано на фиг.1, согласно одному из вариантов осуществления изобретения блок управления системы автоматического поддержания скорости запрограммирован на обеспечение движения автомобиля с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости автомобиля Vзадан, и на выполнение следующих стадий:
определения первого положения А автомобиля при движении по восходящему склону 3 подъема 2, когда в результате замедления автомобиля скорость автомобиля снижается до первой скорости Vмин, более низкой, чем заданная скорость, и замедление достигает нуля или автомобиль только начал ускорение для увеличения скорости до заданной скорости,
определения желательной скорости автомобиля (в приведенном примере скорости Vзавыш) во втором положении C1 при спуске с вершины подъема на первом отрезке у1 после преодоления вершины В подъема,
исходя из желательной скорости автомобиля вычисления минимальной скорости Vмин1 автомобиля на вершине подъема, с которой автомобиль должен преодолеть вершину В подъема, чтобы достигнуть желательной скорости с минимальным или нулевым расходом топлива на первом отрезке у1,
управления скоростью автомобиля на втором отрезке х между первым положением А автомобиля и вершиной В подъема, в результате чего автомобиль достигает минимальной скорости Vмин1 при прохождении вершины подъема.
Соответственно, блок управления ускоряет автомобиль на втором отрезке х лишь настолько, чтобы сила тяготения на первом отрезке у1 движения по нисходящему склону 5 могла ускорить автомобиль до желательной скорости. Тем самым может быть сведено до минимума торможение автомобиля при движении по нисходящему склону 5 и ускорение автомобиля на втором отрезке х. Следует отметить, что поскольку в проиллюстрированном на фиг.1 примере первая скорость Vмин автомобиля рассчитывается таким образом, чтобы она была равна минимальной скорости Vмин1 автомобиля, ускорение на втором отрезке х будет нулевым. Как можно заметить, на втором отрезке х скорость автомобиля поддерживается ниже заданной скорости.
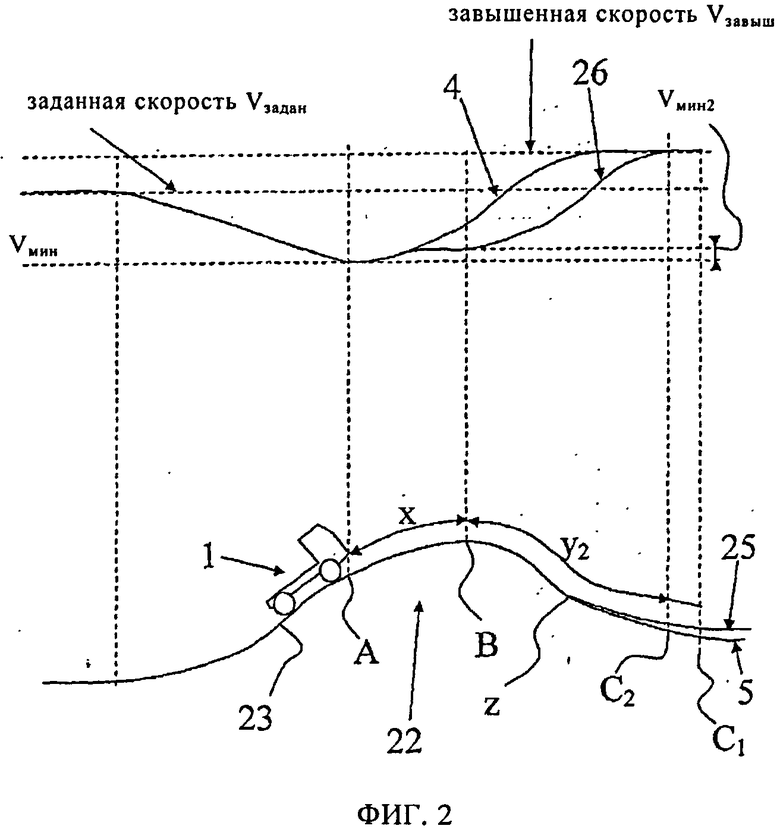
На фиг.2 показан другой подъем 22, который идентичен подъему 2 на фиг.1 на первых двух третях, т.е. вплоть до положения z на нисходящем склоне 25. Нисходящий склон 25 выравнивается раньше нисходящего склона 5. Для удобства сравнения на фиг.2 также проиллюстрировано первое положение C1 на нисходящем склоне 5. При применении изобретения на подъеме 22, проиллюстрированном на фиг.2, блок управления определяет первое положение А автомобиля, которое является таким же, как на подъеме 2. Определяется такое же значение для первой скорости Vмин. Блок управления дополнительно определяет желательную скорость автомобиля (в данном случае также завышенную скорость Vзавыш) для второго положения С2 при спуске с вершины подъема на первом отрезке у2 после преодоления вершины В подъема. Соответственно, поскольку нисходящий склон выравнивается раньше, первый отрезок у2 является более коротким, чем отрезок у1 и, следовательно, положение С2 является более высоким, чем положение C1. Это означает, что желательная скорость автомобиля должна быть достигнута раньше, чем в проиллюстрированном на фиг.1 примере. Блок управления вычисляет минимальную скорость Vмин2 автомобиля на вершине подъема исходя из желательной скорости автомобиля в положении С2, при этом она должна незначительно превышать минимальную скорость Vмин1, чтобы автомобиль мог достигнуть желательной скорости в положении C2. Затем блок управления управляет скоростью автомобиля на втором отрезке х (равном отрезку х на фиг.1) между первым положением А автомобиля и вершиной В подъема, в результате чего автомобиль достигает минимальной скорости Vмин2 при преодолении вершины подъема. Из примера на фиг.2 следует, что автомобиль ускоряется от минимальной скорости Vмин до минимальной скорости Vмин2. Управление скоростью автомобиля согласно изобретению проиллюстрировано кривой 26 на фиг.2.
Выгода такого управления заключается в сведении к минимуму ускорения между положениями А и В и его адаптации к приближающемуся нисходящему склону. Следовательно, более эффективно используются приближающиеся нисходящие склоны для восстановления желательной скорости автомобиля. Это приводит к снижению расхода топлива.
Если бы нисходящий склон был более крутым, чем нисходящий склон 5, вычисленная блоком управления минимальная скорость автомобиля для преодоления вершины В подъема была бы ниже первой скорости Vмин в положении А. Соответственно, движение автомобиля должно было бы замедлиться на втором отрезке х. В одном из дополнительных вариантов осуществления изобретения предусмотрена возможность установления минимальной заниженной скорости автомобиля. Минимальная заниженная скорость может быть установлена вручную или автоматически блоком управления. Блок управления может быть запрограммирован устанавливать заниженную скорость автомобиля при предварительно заданном соотношении с заданной скоростью автомобиля Vзадан. Предварительно заданным соотношением может являться, например, одно из следующего:
минимальная заниженная скорость автомобиля составляет заранее установленный процент от заданной скорости автомобиля,
минимальная заниженная скорость является на заранее установленную величину в км/ч меньше, чем заданная скорость.
В одном из дополнительных вариантов осуществления изобретения вторым положением С1 или С2 может являться одно из следующего:
положение по истечении заданного времени нахождения в пути после преодоления вершины В подъема,
положение на заданном расстоянии от вершины подъема,
положение в конце спуска,
положение на определенном расстоянии от вершины подъема, в котором сопротивление автомобиля движению меняется с отрицательного на положительное. Последним положением является то же самое положение, в котором увеличение скорости автомобиля падает до нуля. Иллюстрацией таких положений служат положения С1 или С2 на фиг.1-3.
В одном из дополнительных вариантов осуществления изобретения блок управления может быть запрограммирован на дополнительное выполнение стадии вычисления требуемого ускорения и замедления автомобиля на втором отрезке х, чтобы автомобиль достигал минимальной скорости на вершине подъема с минимальным расходом топлива на втором отрезке. Например, как показано на фиг.2, ускорение до минимальной скорости Vмин2 на отрезке х происходит преимущественно на первой половине отрезка х. На второй половине отрезка х поддерживается минимальная скорость Vмин2 автомобиля. Согласно этому варианту осуществления изобретения на отрезке х может быть вычислено и применено более умеренное ускорение, например, блок управления может ускорять автомобиль на всем протяжении отрезка х, а именно с меньшим ускорением, и при этом достигать минимальной скорости Vмин2 на вершине В подъема.
На фиг.3 проиллюстрирован такой же подъем 2, как и на фиг.1, и, соответственно, такие же положения А, В, C1, х и у1, как и на фиг.2 и 3. В обоих примерах используется одна и та же заданная скорость Vзадан и завышенная скорость Vзавыш.
Автомобиль может иметь двигательный агрегат, с возможностью передачи приводного усилия соединенный с ведомыми колесами посредством трансмиссии. Может быть предусмотрена ступенчатая трансмиссия, которая может иметь входной вал, промежуточный вал, который имеет по меньшей мере одно зубчатое колесо, входящее в зацепление с зубчатым колесом входного вала, и главный вал привода с зубчатыми колесами, которые входят в зацепление с зубчатыми колесами промежуточного вала. Главный вал привода дополнительно соединен с входным валом, который соединен с ведущими колесами, например, посредством карданного вала. Каждая пара зубчатых колес имеет передаточное отношение, отличающееся от передаточного отношения другой пары колес коробки передач. Различные передаточные отношения получают за счет того, что различные пары колес передают крутящий момент от двигательного агрегата ведомым колесам. В такой трансмиссии между двумя взаимодействующими и вращающимися зубчатыми колесами происходят потери на трение между зубцами каждого из зубчатых колес, находящихся в зацеплении.
В некоторых ступенчатых трансмиссиях высшая передача (наименьшее передаточное отношение) называется прямой передачей. Иными словами, при включении прямой передачи входной вал и главный вал привода (или выходной вал) непосредственно соединяются друг с другом в коробке передач, и это означает, что крутящий момент напрямую передается через трансмиссию без какой-либо зубчатой передачи. В качестве альтернативы, можно сказать, что передаточное отношение составляет 1:1. Соответственно, между зацепляющимися зубчатыми колесами не происходит потерь. Иными словами, прямая передача является, в целом, более топливосберегающей, чем другие непрямые передачи, передаточные отношения у которых получают посредством пар зубчатых колес. В ЕР 1494887 описан один из примеров известного уровня техники, в котором трансмиссия имеет прямую передачу.
В другом варианте осуществления изобретения и, как показано на фиг.3, блок управления помимо выполнения упомянутых стадий дополнительно запрограммирован на выполнение следующих стадий:
определения первой скорости Vмин автомобиля, являющейся несколько более низкой, чем скорость автомобиля при включенной прямой передаче в первом положении А автомобиля,
после определения заданного состояния автомобиля установления минимальной скорости автомобиля, равной скорости автомобиля при включенной прямой передаче, и ускорения автомобиля до минимальной скорости Vмин3 автомобиля и включения прямой передачи,
движения автомобиля при включенной прямой передаче на остающемся участке второго отрезка х.
Выгода такого управления заключается в дополнительной экономии топлива при управлении автомобилем при включенной прямой передаче вместо непрямой передачи. Ускорение автомобиля на отрезке х связано с определенными затратами на топливо. Соответственно, для инициирования ускорения и последующего включения прямой передачи должно иметь место правильное состояние автомобиля, а именно расчетная экономия топлива за счет прохождения части отрезка х при включенной прямой передаче должна превышать дополнительный расход топлива вследствие ускорения на отрезке х. Заданным состоянием автомобиля является, например, по меньшей мере одно из следующего:
состояние при непосредственно более низкой скорости Vмин3, чем скорость при включенной прямой передаче, что означает разность менее 5 км/ч между скоростью при включенной прямой передаче и первой скоростью Vмин автомобиля,
состояние, когда длина второго отрезка х превышает заданное значение,
состояние, когда расчетный временной интервал движения автомобиля при включенной прямой передаче на втором отрезке х превышает заданное значение.
Значения четырех упомянутых состояний предварительно задаются производителем автомобиля. В одном из более сложных вариантов осуществления изобретения блок управления может быть запрограммирован на вычисление расчетного расхода топлива, если будет включена прямая передача, по сравнению с продолжением движения при включенной непрямой передаче с минимальной скоростью Vмин1 до вершины В подъема. На основании расчета принимается решение о включении прямой передачи.
Следует отметить, что в рассмотренных вариантах осуществления изобретения блок управления использует данные как о текущем положении автомобиля, так и о будущих положениях автомобиля (или рельефе подъема), чтобы иметь возможность прогнозировать вершину подъема, второе положение и минимальную скорость автомобиля.
Также следует отметить, что в рассмотренных вариантах осуществлении изобретения при прохождении отрезков у1 или у2 расход топлива сводится к минимуму за счет того, что блоку управления требуется нулевая тяговая мощность двигательного агрегата. Нулевая тяговая мощность расходуется, например, когда двигательный агрегат соединен ведомыми колесами автомобиля как с возможностью передачи приводного усилия (например, при торможении двигателем), так и без возможности передачи приводного усилия, например при свободном ходе. Следовательно, на отрезках у1 или у2 автомобиль ускоряется только за счет силы тяготения. При вычислении минимальной скорости автомобиля на вершине подъема необходимо учитывать, будет ли двигательный агрегат соединен с ведомыми колесами с возможностью передачи приводного усилия или без возможности передачи приводного усилия, поскольку эти два случая значительно различаются с точки зрения сопротивлении автомобиля движению.
В одном из дополнительных вариантов осуществления изобретения блок управления запрограммирован на уравнивание минимальной скорости и первой скорости Vмин автомобиля, если второй отрезок имеет меньшую длину, чем заданное значение. Основная выгода этого заключается в том, что можно избегать дополнительных ненужных ускорений.
В одном из дополнительных вариантов осуществления изобретения автомобиль не обязательно должен быть оснащен функцией установления максимальной завышенной скорости Vзавыш для того, чтобы инициировать торможение, если скорость автомобиля приближается к завышенной скорости Vзавыш. Вместо этого, в таком автомобиле, не оснащенном системой автоматического поддержания скорости с функций торможения, желательная скорость автомобиля может быть равна заданной скорости Vзадан.
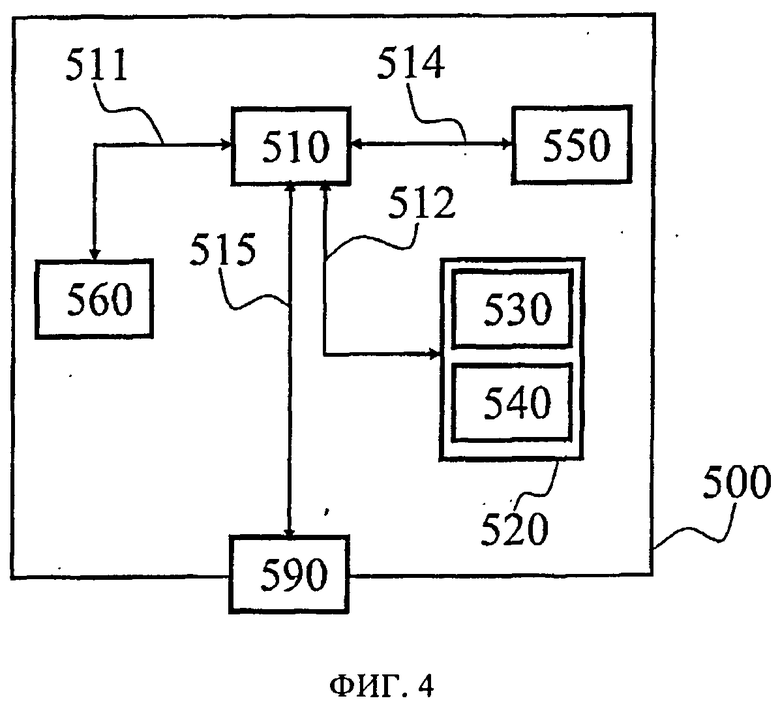
На фиг.4 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как блок, упомянутый выше. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления автоматической системой поддержания скорости. В одном из альтернативных вариантов осуществления программа хранится в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся в энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.

Изобретение относится к системам круиз-контроля. При управлении системой автоматического поддержания скорости транспортного средства осуществляют движение транспортного средства (1) с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости (Vзадан) транспортного средства (1). Определяют первое положение (А) транспортного средства (1) при движении вверх по склону, когда в результате замедления транспортного средства его скорость снижается до первой скорости (Vмин), более низкой, чем заданная скорость, и замедление достигает нуля или транспортное средство только начало ускорение для увеличения скорости до заданной скорости. Определяют желательную скорость (Vзавыш) во втором положении (C1, С2) при спуске с вершины подъема на первом отрезке (у1, у2) после преодоления вершины подъема. Исходя из желательной скорости вычисляют значение минимальной скорости (Vмин1, Vмин2, Vмин3) на вершине подъема, с которой транспортное средство должно преодолеть вершину подъема, чтобы достигнуть желательной скорости с минимальным или нулевым расходом топлива на первом отрезке (у1, у2). Управляют скоростью транспортного средства (1) на втором отрезке (х) между первым положением (А) транспортного средства (1) и вершиной (В) подъема, в результате чего транспортное средство (1) достигает минимальной скорости (Vмин1, Vмин2, Vмин3) во время преодоления вершины подъема, и поддерживают скорость транспортного средства на втором отрезке, ниже заданной скорости. 2 н. и 13 з.п. ф-лы, 4 ил.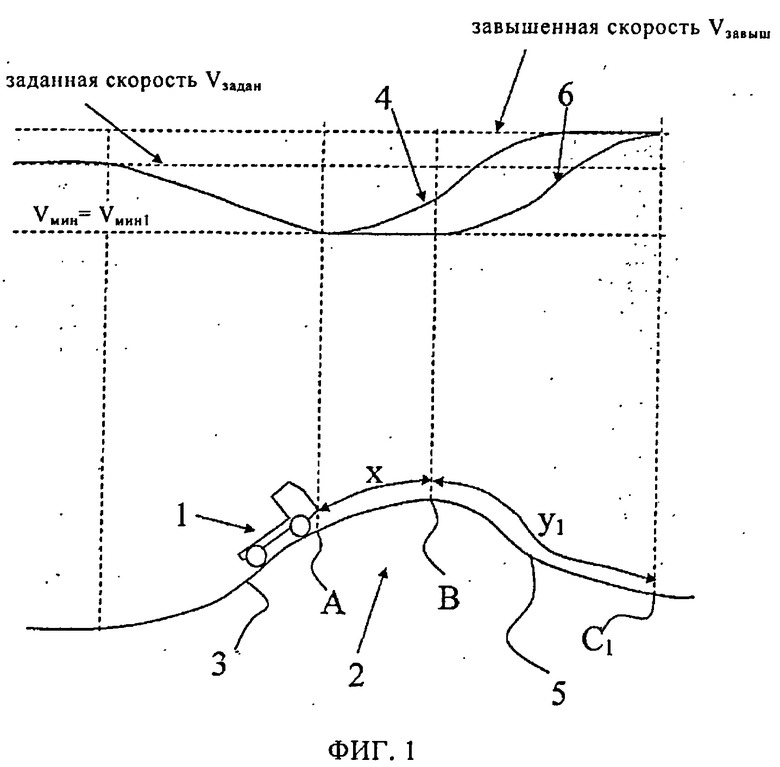
1. Способ управления системой автоматического поддержания скорости транспортного средства, включающий:
движение транспортного средства с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости (Vзадан) транспортного средства;
определение первого положения (А) транспортного средства при движении вверх по склону, когда в результате замедления транспортного средства его скорость снижается до первой скорости (Vмин), более низкой, чем заданная скорость, и замедление достигает нуля или транспортное средство только начало ускорение для увеличения скорости до заданной скорости;
определение желательной скорости (Vзавыш) транспортного средства во втором положении (C1, С2) при спуске с вершины подъема на первом отрезке (у1, у2) после преодоления вершины подъема;
исходя из желательной скорости транспортного средства вычисление минимальной скорости (Vмин1, Vмин2, Vмин3) на вершине подъема, с которой транспортное средство должно преодолеть вершину подъема, чтобы достигнуть желательной скорости с минимальным или нулевым расходом топлива на первом отрезке (у1, у2);
управление скоростью транспортного средства на втором отрезке (х) между первым положением (А) транспортного средства и вершиной (В) подъема, в результате чего транспортное средство достигает минимальной скорости (Vмин1, Vмин2, Vмин3) во время преодоления вершины подъема, и поддержание скорости транспортного средства на втором отрезке ниже заданной скорости.
2. Способ по п.1, отличающийся тем, что вторым положением (С1, С2) транспортного средства является одно из следующего:
положение по истечении заданного времени нахождения в пути после преодоления вершины (В) подъема;
положение на заданном расстоянии от вершины подъема,
положение в конце спуска;
положение на определенном расстоянии от вершины подъема, в котором сопротивление транспортного средства движению меняется с отрицательного на положительное.
3. Способ по п.1, отличающийся тем, что он дополнительно включает вычисление требуемого ускорения или замедления транспортного средства на втором отрезке (х) с целью достижения минимальной скорости транспортного средства на вершине подъема с минимальным расходом топлива на втором отрезке.
4. Способ по п.1, отличающийся тем, что он дополнительно включает:
определение первой скорости (Vмин) транспортного средства непосредственно ниже скорости транспортного средства при включенной прямой передаче в первом положении (А) транспортного средства;
после определения заданного состояния транспортного средства, установление минимальной скорости транспортного средства, равной скорости транспортного средства при включенной прямой передаче, и ускорение транспортного средства до его минимальной скорости (Vмин3) и включение прямой передачи;
движения транспортного средства при включенной прямой передаче на остающемся участке второго отрезка (х).
5. Способ по п.4, отличающийся тем, что заданным состоянием транспортного средства является, по меньшей мере, одно из следующего:
состояние при непосредственно более низкой скорости (Vмин3), чем скорость при включенной прямой передаче, означающее разность менее 5 км/ч между скоростью при включенной прямой передаче и первой скоростью (Vмин) транспортного средства;
состояние, когда длина второго отрезка (х) превышает заданное значение;
состояние, когда расчетный временной интервал движения транспортного средства при включенной прямой передаче на втором отрезке (х) превышает заданное значение.
6. Способ по одному из предшествующих пунктов, отличающийся тем, что для системы автоматического поддержания скорости устанавливают максимальную завышенную скорость (Vзавыш), которая по меньшей мере равна заданной скорости транспортного средства или превышает ее, при этом желательная скорость транспортного средства равна максимальной завышенной скорости транспортного средства.
7. Способ по п.6, отличающийся тем, что устанавливают минимальную заниженную скорость транспортного средства, находящуюся в предварительно заданном соотношении с заданной скоростью (Vзадан).
8. Способ по п.7, отличающийся тем, что предварительно заданным соотношением является одно из следующего:
минимальная заниженная скорость транспортного средства составляет заранее установленный процент от заданной скорости транспортного средства;
минимальная заниженная скорость является на заранее установленную величину меньше, чем заданная скорость.
9. Способ по п.1, отличающийся тем, что устанавливают минимальную заниженную скорость транспортного средства, находящуюся в предварительно заданном соотношении с заданной скоростью (Vзадан).
10. Способ по п.9, отличающийся тем, что предварительно заданным соотношением является одно из следующего:
минимальная заниженная скорость транспортного средства составляет заранее установленный процент от заданной скорости транспортного средства;
минимальная заниженная скорость является на заранее установленную величину меньшей, чем заданная скорость.
11. Способ по п.10, отличающийся тем, что, исходя из данных о текущем положении транспортного средства и будущем дорожном рельефе подъема, прогнозируют вершину подъема, второе положение и минимальную скорость транспортного средства.
12. Способ по п.1, отличающийся тем, что, исходя из данных о текущем положении транспортного средства и будущем дорожном рельефе подъема, прогнозируют вершину подъема, второе положение и минимальную скорость транспортного средства.
13. Способ по п.12, отличающийся тем, что, если второй отрезок (х) имеет меньшую длину, чем заданное значение, устанавливают минимальную скорость транспортного средства, равную первой скорости (Vмин) транспортного средства.
14. Способ по п.1, отличающийся тем, что, если второй отрезок (х) имеет меньшую длину, чем заданное значение, устанавливают минимальную скорость транспортного средства, равную первой скорости (Vмин) транспортного средства.
15. Система автоматического поддержания скорости транспортного средства, в которую входят блок управления, водительский интерфейс ввода, указатель положения транспортного средства, указатель дорожного рельефа, отличающаяся тем, что блок управления выполнен с возможностью осуществления способа по любому из п.п.1-14 с использованием данных, поступающих от указателя положения транспортного средства и указателя дорожного рельефа, для вычисления минимальной скорости (Vмин1, Vмин2, Vмин3) транспортного средства.
| US 2004068359 A1, 08.04.2004 | |||
| US 6374173 B1, 16.04.2002 | |||
| DE 102006001818 A1,19.07.2007 | |||
| DE 102008038078 A1, 14.05.2009 | |||
| Установка для выращивания рыбы | 1987 |
|
SU1494887A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| ЗАПОМИНАЮЩАЯ СРЕДА ДЛЯ НОСИТЕЛЯ ПРОДОЛЬНОЙ МАГНИТНОЙ ЗАПИСИ | 1992 |
|
RU2029794C1 |

