Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления системой автоматического поддержания скорости согласно преамбуле п.1 прилагаемой формулы изобретения. Изобретение также относится к системе автоматического поддержания скорости транспортного средства, предназначенной для такого способа управления системой автоматического поддержания скорости согласно преамбуле п.3 прилагаемой формулы изобретения.
Настоящее изобретение также относится к компьютерной программе, компьютерному программному продукту и запоминающей среде компьютера, при этом все из перечисленного предназначено для применения с компьютером для осуществления упомянутого способа.
Уровень техники
Транспортные средства, такие как легковые, грузовые, буксирные автомобили и автобусы, часто оснащают так называемой системой автоматического поддержания скорости, также называемой автоматической системой поддержания заданной скорости для автоматического управления скоростью транспортного средства (круиз-контроль). Такая система автоматического поддержания скорости содержит определенное средство, такое как датчик скорости для контроля действительной скорости автомобиля. Система автоматического поддержания скорости сравнивает действительную скорость автомобиля с заданной скоростью. Заданная скорость, например, может быть введена в систему автоматического поддержания скорости в качестве преобладающей действительной скорости автомобиля при приведении в действие водителем переключателя настройки. Система автоматического поддержания скорости генерирует сигнал ошибки путем сравнения действительной скорости автомобиля с заданной скоростью. Сигнал ошибки затем используют, например, для управления исполнительным механизмом, связанным с топливным насосом или дроссельной заслонкой двигателя для изменения частоты вращения двигателя до тех пор пока сигнал ошибки преимущественно не будет равен нулю, т.е. действительная скорость автомобиля не будет соответствовать заданной скорости.
В RP 1439976 и US 6990401 описаны два известных из уровня техники примера системы автоматического поддержания скорости, являющейся системой автоматического поддержания скорости с прогнозированием, в которой используются данные о текущем положении автомобиля и будущем рельефе дороги, например величинах приближающегося уклона или подъема дороги с целью регулировки открытия дроссельной заслонки таким образом, чтобы повысить эффективность использования топлива.
Система автоматического поддержания скорости также может предусматривать автоматическое поддержание скорости автомобиля с функцией торможения, что означает, что система автоматического поддержания скорости автоматически затормаживает автомобиль, например, с помощью вспомогательных и(или) рабочих тормозов в случае превышения заданной завышенной скорости автомобиля. Одним из недостатков такой системы может являться то, что она начинает осуществлять полное торможение при скорости, на несколько км/ч превышающей заданную завышенную скорость автомобиля. Запаздывание объясняется соображениями комфорта и механическими задержками. Это приводит к тому, что водитель обычно снижает заданную завышенную скорость автомобиля во избежание риска значительного завышения скорости, в особенности в случае тяжело нагруженного автомобиля и(или) спуска по крутому склону. Это отрицательно сказывается на расходе топлива, поскольку в результате снижения заданной завышенной скорости автомобиля снижается использование кинетической энергии автомобиля. В качестве альтернативы, водитель может осуществлять ручное торможение автомобиля, что приводит к выключению автоматического поддержания скорости.
Одно из решений, которое до некоторой степени смягчает последствия этого недостатка, описано в JP 6135260, где блок управления определяет вес автомобиля с грузом и уклон дороги с целью корректировки тормозной мощности при автоматическом поддержании скорости автомобиля с функцией торможения. В заявках WO 2008094112 и WO 2009126554 описаны дополнительные известные из техники решения, относящиеся к настоящему изобретению.
В основу настоящего изобретения положена задача дополнительного усовершенствования такой системы автоматического поддержания скорости, в которой для улучшения автоматического поддержания скорости автомобиля с функцией торможения используются данные о текущем положении автомобиля.
Раскрытие изобретения
Основной задачей настоящего изобретения является создание усовершенствованного способа автоматического поддержания скорости, позволяющего избегать чрезмерного завышения скорости при инициировании автоматического поддержания скорости транспортного средства (далее - автомобиля) с функцией торможения. Решение этой задачи достигнуто посредством упомянутого во вводной части способа, который охарактеризован в п.1. Решение задачи изобретения также достигнуто посредством упомянутой во вводной части системы, которая охарактеризована в п.3.
В изобретении предложен способ управления системой автоматического поддержания скорости автомобиля, включающий стадии:
движения автомобиля с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости автомобиля,
определения первого параметра, которым является вес автомобиля с грузом, и второго параметра, которым является текущий уклон дороги,
исходя из определенных первого и второго параметров установки для заданной завышенной скорости автомобиля при автоматическом поддержании скорости автомобиля с функцией торможения в системе автоматического поддержания скорости нового значения,
если установлено, что значение первого параметра является высоким и(или) что вторым параметром является спуск по крутому склону, корректировки заданной завышенной скорости автомобиля путем ее снижения в соответствующей степени, или
если установлено, что значение первого параметра является низким и(или) что вторым параметром является спуск по склону с небольшим уклоном, корректировки заданной завышенной скорости автомобиля путем ее увеличения в соответствующей степени.
Согласно другому варианту осуществления изобретения способ дополнительно включает стадии:
определения третьего параметра, которым является будущий рельеф дороги на заданном участке дороги впереди текущего положения автомобиля,
исходя из определенных параметров с первого по третий регулировки заданной завышенной скорости автомобиля.
Изобретение также относится к системе автоматического поддержания скорости, в которую входит (включая без ограничения) блок управления, служащий для выполнения упомянутых стадий способа.
Дополнительные выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Настоящее изобретение будет более подробно описано со ссылкой на сопровождающие его чертежи, на которых в качестве примеров показаны дополнительные предпочтительные варианты осуществления изобретения, а также технические предпосылки, и на которых:
на фиг.1 схематически показана диаграмма скорости автомобиля и соответствующие примеры условий движения, при этом на диаграмме проиллюстрировано автоматическое поддержание скорости автомобиля с функцией торможения в системе автоматического поддержания скорости согласно одному из вариантов осуществления изобретения,
на фиг.2 - один из вариантов осуществления изобретения, примененного в компьютерной среде.
Описание осуществления изобретения
Системой автоматического поддержания скорости для автоматического управления скоростью автомобиля может быть оснащен известный из техники автомобиль. Система автоматического поддержания скорости содержит блок управления для непрерывной обработки входящих сигналов и доставки выходных сигналов, например, блоку управления движением для управления двигательным агрегатом, а также блоку управления торможением, если он установлен, для управления тормозными устройствами автомобиля с целью поддержания заданной скорости. Тормозными устройствами может являться рабочий тормоз, и(или) вспомогательный тормоз, и(или) электродвигатель/генератор (если, например, автомобиль оснащен гибридной двигательной системой). Система автоматического поддержания скорости дополнительно содержит по меньшей мере водительский интерфейс ввода. Блок управления служит для выполнения стадий описанных ниже функций согласно изобретению с использованием данных о текущем положении автомобиля.
Система автоматического поддержания скорости установлена на режим поддержания заданной скорости Vзадан. Она может устанавливаться водителем. Соответственно, блок управления в системе автоматического поддержания скорости обеспечивает поддержание заданной скорости Vзадан. Водителем также может быть установлена максимальная завышенная скорость Vзавыш автомобиля, чтобы блок управления инициировал торможение автомобиля, если скорость автомобиля приближается к завышенной скорости Vзавыш. Эта функция известна как таковая и также называется системой автоматического поддержания скорости автомобиля с функцией торможения. Для системы автоматического поддержания скорости может быть установлена максимальная завышенная скорость Vзавыш, по меньшей мере равная заданной скорости автомобиля или превышающая заданную скорость автомобиля. В описанных далее вариантах осуществления изобретения завышенная скорость Vзавыш превышает заданную скорость Vзадан.
Как показано на фиг.1, согласно одному из вариантов осуществления изобретения блок управления системы автоматического поддержания скорости запрограммирован на обеспечение движения автомобиля с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости автомобиля Vзадан, и на выполнение следующих стадий:
движения автомобиля с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости автомобиля,
определения первого параметра, которым является вес автомобиля с грузом, и второго параметра, которым является текущий уклон дороги,
исходя из определенных первого и второго параметров, установки для заданной завышенной скорости Vзавыш автомобиля при автоматическом поддержании скорости автомобиля с функцией торможения в системе автоматического поддержания скорости нового значения.
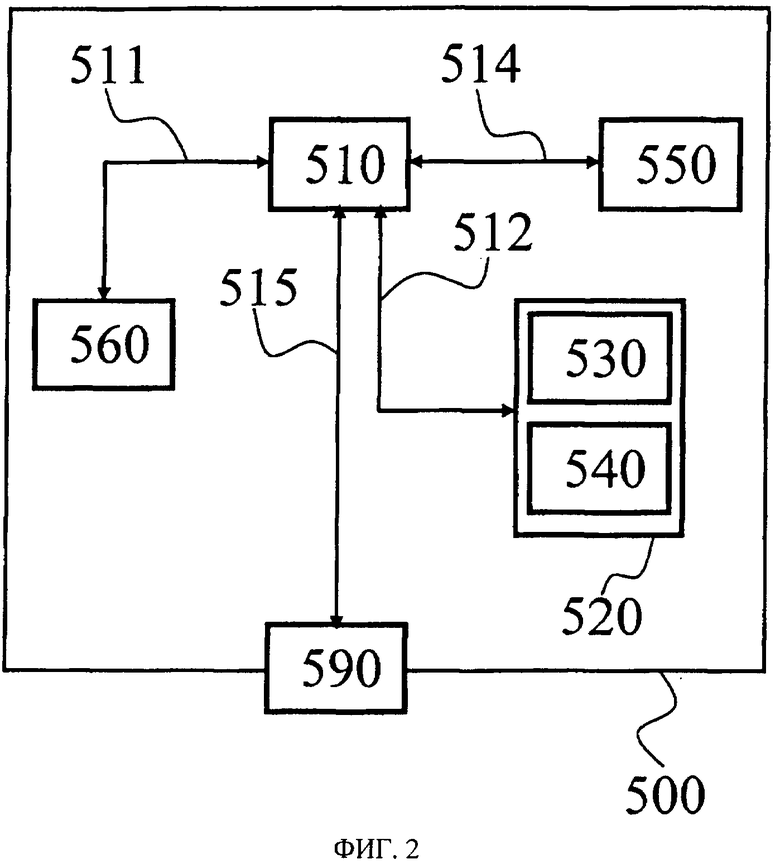
Как показано на фиг.1, на диаграмме зависимости скорости и пройденного по дороге расстояния различные уровни скорости автомобиля обозначены тремя горизонтальными пунктирными линиями. Заданная скорость Vзадан и завышенная скорость Vзавыш устанавливаются водителем. Позициями А, В и С обозначены примеры различных участков расстояния по дороге с типичными примерами различных условий движения автомобиля на протяжении расстояния по дороге. Кривая 1 скорости автомобиля отображает, как изменяется/регулируется действительная скорость автомобиля на протяжении расстояния по дороге. На проиллюстрированном в качестве примера участке А условия движения автомобиля соответствуют относительно горизонтальной дороге, а в качестве кривой 1 скорости автомобиля 1 представлено автоматическое поддержание скорости на этом участке с возможностью поддержания заданной скорости Vзадан. В начале участка В условия движения автомобиля соответствуют спуску по крутому склону, и, как показано на кривой 1 скорости автомобиля 1, скорость автомобиля увеличивается. В соответствии с изобретением блок управления запрограммирован на определение первого параметра и второго параметра в начале участка В, и, исходя из определенных параметров, блок управления запрограммирован на установку для завышенной скорости Vзавыш нового значения, показанного на фиг.1 как завышенная скорость Vзавыш гибк. Выгода состоит в возможности избегать увеличения скорости автомобиля, приводящего к превышению завышенной скорости Vзавыш вследствие задержек в системе автоматического поддержания скорости и тормозных устройствах. Вторым параметром в данном случае является текущий уклон дороги. Разумеется, что этот уклон дороги также может входить, например, в измеренное сопротивление движению, которое обычно включает сопротивление воздуха, сопротивление качению и упомянутый уклон дороги.
Согласно одному из дополнительных вариантов осуществления изобретения блок управления запрограммирован на дополнительное выполнение следующих стадий:
если установлено, что значение первого параметра является высоким и(или) что вторым параметром является спуск по крутому склону, корректировки заданной завышенной скорости автомобиля путем ее снижения в соответствующей степени, или
если установлено, что значение первого параметра является низким и(или) что вторым параметром является спуск по склону с небольшим уклоном, корректировки заданной завышенной скорости автомобиля путем ее увеличения в соответствующей степени.
На фиг.1 проиллюстрирован один из примеров, когда автомобиль начинает спуск по крутому склону в начале участка В. Поскольку блок управления определяет, что происходит спуск по крутому склону, завышенная скорость Vзавыш снижается до завышенной скорости Vзавыш гибк. Вычисленная и выбранная степени снижения завышенной скорости Vзавыш главным образом зависит от следующих переменных величин:
веса автомобиля с грузом,
степени крутизны спуска по склону,
мощности тормозных устройств автомобиля,
ожидаемых механических задержек в тормозных устройствах и
комфортных установок в системе автоматического поддержания скорости во избежание внезапных резких изменений скорости автомобиля.
Соответствующим способом и, как было упомянуто, блок управления может быть запрограммирован на увеличение завышенной скорости Vзавыш, если преобладают условия движения автомобиля, допускающие такое увеличение.
Как показано на фиг.1, скорость автомобиля продолжает увеличиваться и вскоре достигает завышенной скорости Vзавыш гибк, при которой приводятся в действие тормозные устройства с целью уменьшения ускорения и установления завышенной скорости Vзавыш гибк. В проиллюстрированном примере тормозные устройства приводятся в действие немного раньше, чем автомобиль достигает завышенной скорости Vзавыш гибк. Этим способом предотвращается превышение завышенной скорости Vзавыш гибк.
На протяжении средней части участка В расстояния по дороге и вплоть до вертикальной линии 2 автомобиль продолжает спуск по склону. Спуск по склону выравнивается по мере приближения к упомянутой линии 2. Как видно в проиллюстрированном примере, блок управления может быть запрограммирован допускать продолжение увеличения скорости автомобиля вплоть до завышенной скорости Vзавыш. При этом тормозные устройства по-прежнему действуют, но управляются таким образом, чтобы допускать увеличение скорости автомобиля вплоть до завышенной скорости Vзавыш. Этим способом может достигаться завышенная скорость Vзавыш без риска ее превышения.
После линии 2 на второй половине участка В преобладают более горизонтальные дорожные условия, и тормозящее действие тормозных устройств может постепенно ослабляться с последующим выключением тормозных устройств. Это может происходить в каком-либо месте после линии 2. Скорость автомобиля будет продолжать снижаться из-за сопротивления движению, и блок автоматического поддержания скорости доведет скорость автомобиля до заданной скорости Vзадан, как на участке С расстояния по дороге. Разумеется, что вторая половина участка В и участок С также могут представлять собой спуск по склону, но который имеет меньший уклон, чем на первой половине участка В, и на котором тормозящего действия тормозных устройств будет достаточно для снижения скорости автомобиля до заданной скорости Vзадан, если это целесообразно.
Согласно другому варианту осуществления изобретения в систему автоматического поддержания скорости автомобиля может дополнительно входить указатель положения автомобиля и указатель дорожного рельефа, как таковые известные из уровня техники (см., например, ЕР 1439976 и US 6990401). На основании данных указателя положения автомобиля и указателя дорожного рельефа блок управления способен определять будущий рельеф дороги, то есть как изменяется уклон дороги на протяжении заданного расстояния впереди текущего положения автомобиля. Примерами указателя дорожного рельефа являются указатели маршрута и электронные карты, а данные о текущем положении автомобиля могут извлекаться, например, из известной GPS (глобальной системы определения местоположения). В соответствии с изобретением блок управления может быть дополнительно запрограммирован на выполнение следующих стадий:
определения третьего параметра, которым является будущий рельеф дороги на заданном участке дороги впереди текущего положения автомобиля,
исходя из определенных параметров с первого по третий регулировки заданной завышенной скорости автомобиля.
Таким образом, помимо упомянутых переменных при вычислении завышенная скорость Vзавыш гибк также может учитываться будущий рельеф дороги. Этот вариант осуществления способен обеспечивать еще лучшую корректировку завышенной скорости Vзавыш за счет учета уклона дороги.
Автомобиль, такой как упоминается выше, может иметь двигательный агрегат, с возможностью передачи приводного усилия соединенный с ведомыми колесами посредством трансмиссии. Может быть предусмотрена ступенчатая трансмиссия, которая может иметь входной вал, промежуточный вал, который имеет по меньшей мере одно зубчатое колесо, входящее в зацепление с зубчатым колесом входного вала, и главный вал привода с зубчатыми колесами, которые входят в зацепление с зубчатыми колесами промежуточного вала. Главный вал привода дополнительно соединен с входным валом, который соединен с ведущими колесами, например, посредством карданного вала. Каждая пара зубчатых колес имеет передаточное отношение, отличающееся от передаточного отношения другой пары колес коробки передач. Различные передаточные отношения получают за счет того, что различные пары колес передают крутящий момент от двигательного агрегата ведомым колесам. В такой трансмиссии между двумя взаимодействующими и вращающимися зубчатыми колесами происходят потери на трение между зубцами каждого из зубчатых колес, находящихся в зацеплении.
В другом варианте осуществления изобретения может использоваться такая трансмиссия с целью способствования общему тормозящему действию. Как описано далее, согласно диаграмме зависимости скорости от расстояния по дороге на фиг.1 на участке А и в начале участка В может быть включена передача х. После обнаружения спуска по крутому склону и определения веса автомобиля с грузом блок управления может быть запрограммирован на инициирование и выполнение перехода на более низкую передачу х-1. По достижении линии 2, где склон выравнивается, передача х-1 может быть выключена, и может быть снова включена передача х. В качестве альтернативы и, если это целесообразно, может осуществляться скачкообразное переключение передач.
На фиг.2 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как блок, упомянутый выше. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления автоматической системой поддержания скорости. В одном из альтернативных вариантов осуществления программа хранится в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.
Изобретение относится к системам поддержания скорости транспортных средств. Способ управления системой автоматического поддержания скорости транспортного средства, имеющей функцию торможения для инициации автоматического торможения транспортного средства, если его скорость приближается к заданной максимальной завышенной скорости, включает приведение в действие системы автоматического поддержания заданной скорости, определение первого параметра - веса транспортного средства с грузом и второго параметра - текущего уклона дороги. Затем снижают или увеличивают скорость транспортного средства в зависимости от данных параметров. Изобретение также относится к системе автоматического поддержания скорости, в которой блок управления для поддержания заданной скорости запрограммирован на выполнение операций вышеуказанного способа. Решение направлено на избежание чрезмерного завышения скорости. 2 н. и 1 з.п. ф-лы, 2 ил.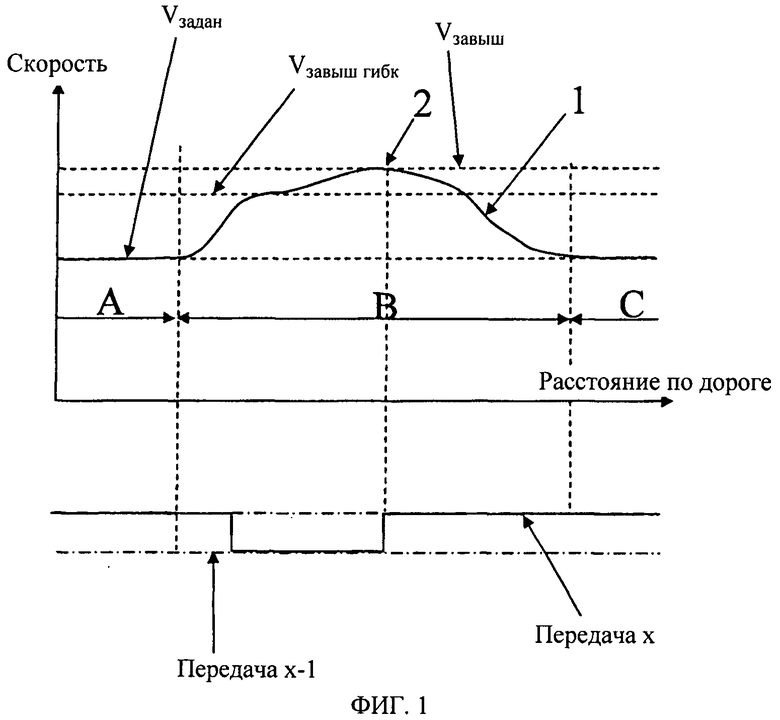
1. Способ управления системой автоматического поддержания скорости транспортного средства, имеющей функцию торможения, способную инициировать автоматическое торможение транспортного средства, если его скорость приближается к заданной для этого транспортного средства максимальной завышенной скорости Vзавыш, включающий стадии:
движения транспортного средства с приведенной в действие системой автоматического поддержания скорости, установленной для поддержания заданной скорости (Vзадан) транспортного средства;
определения первого параметра, которым является вес транспортного средства с грузом, и второго параметра, которым является текущий уклон дороги;
исходя из определенных первого и второго параметров установки для заданной для транспортного средства максимальной завышенной скорости (Vзавыш) при автоматическом поддержании скорости транспортного средства с функцией торможения в системе автоматического поддержания скорости нового значения (Vзавыш гибк);
если установлено, что значение первого параметра является высоким и(или) что вторым параметром является спуск по крутому склону, корректировки заданной для транспортного средства максимальной завышенной скорости путем ее снижения в соответствующей степени; или
если установлено, что значение первого параметра является низким и(или) что вторым параметром является спуск по склону с небольшим уклоном, корректировки заданной максимальной для транспортного средства завышенной скорости путем ее увеличения в соответствующей степени.
2. Способ по п.1, дополнительно включающий стадии:
определения третьего параметра, которым является будущий рельеф дороги на заданном участке дороги впереди текущего положения транспортного средства;
исходя из определенных параметров с первого по третий регулировки заданной для транспортного средства максимальной завышенной скорости транспортного средства.
3. Система автоматического поддержания скорости, имеющая функцию торможения, способную инициировать автоматическое торможение транспортного средства, если его скорость приближается к заданной для этого транспортного средства максимальной завышенной скорости V(завыш), содержащая блок управления для поддержания заданной скорости (Vзадан), запрограммированный на:
определение первого параметра, которым является вес транспортного средства с грузом, и второго параметра, которым является текущий уклон дороги;
исходя из определенных первого и второго параметров, установку для заданной для транспортного средства максимальной завышенной скорости (Vзавыш) при автоматическом поддержании скорости транспортного средства с функцией торможения в системе автоматического поддержания скорости нового значения (Vзавыш гибк); и
если установлено, что значение первого параметра является высоким и(или) что вторым параметром является спуск по крутому склону, блок управления запрограммирован на корректировку заданной для транспортного средства максимальной завышенной скорости путем ее снижения в соответствующей степени; или
если установлено, что значение первого параметра является низким и(или) что вторым параметром является спуск по склону с небольшим уклоном, блок управления запрограммирован на корректировку заданной для транспортного средства максимальной завышенной скорости путем ее увеличения в соответствующей степени.
| JP H06135260 A, 17.05.1994 | |||
| JP 2009154620 A, 16.07.2009 | |||
| JP H10264804 A, 06.10.1998 | |||
| Система автоматического управления скоростными и нагрузочными режимами самоходной машины | 1988 |
|
SU1625723A1 |

