Изобретение относится к навигационной технике и может быть использовано при проектировании интегрированных навигационных систем для различных транспортных средств.
Одним из основных требований к навигационным системам различных транспортных средств является их автономность при обеспечении достаточной точности, обеспечивающей безопасность управления транспортным средством.
Известна система [1], которая содержит антенну, связанную через усилитель с четырехканальным радиоприемником, выходы которого подключены к первой группе входов вычислителя местоположения навигационных искусственных спутников Земли (ИСЗ), вторая группа входов которого соединена с выходами блока начальной установки альманаха данных о ИСЗ, а третий вход упомянутого вычислителя подключен к выходу таймера, связанного с соответствующим выходом приемника. Выходы вычислителя местоположения ИСЗ подключены к первой группе входов блока выделения радиовидимых ИСЗ, выходы которого соединены с входами блока выбора рабочего созвездия ИСЗ. Выходы блока выбора рабочего созвездия ИСЗ подключены к входам блока вычисления местоположения пользователя, выходы которого соединены с входами дисплея. Кроме того, система содержит блок ввода начальных данных о собственном положении пользователя, подключенный выходами к входам блока грубого вычисления местоположения пользователя, выходы которого соединены с другой группой входов блока выделения радиовидимых ИСЗ. На случай потери радиоконтакта с одним из спутников рабочего созвездия введен блок периодической выставки упрежденного времени, подключенный выходом к третьим входам блока грубого вычисления собственного местоположения системы и вычислителя местоположения ИСЗ, а также блок перехода к другому спутнику.
Эта система решает задачу определения местоположения пользователя в трехмерном пространстве, если имеет надежный радиоконтакт и достоверную информацию от всех четырех спутников выбранного рабочего созвездия, однако на поиск, захват и сопровождение этого созвездия затрачивают значительное время из-за неточного определения начального местоположения пользователя с ошибкой, составляющей сотни километров.
Наиболее близкой к предлагаемой системе по технической сущности является система [2], которая содержит радиоприемник, соединенный через усилитель с антенной, а выходами подключенный к вычислителю местоположения навигационных спутников, подключенному другими входами к блоку начальной установки альманаха данных об орбитах спутников, а выходы этого вычислителя соединены с входами блока выделения радиовидимых спутников. Выходы этого блока подключены к входам блока выделения рабочего созвездия спутников, соединенного выходами с входами блока вычислителя местоположения потребителя. Кроме того, в систему входят измеритель проекций абсолютной угловой скорости, состоящий их трех ортогонально установленных лазерных гироскопов, измеритель проекций кажущегося ускорения, включающий три акселерометра, установленных по соответствующим осям лазерных гироскопов. Указанные измерители через блоки коррекции подключены к вычислителю навигационных параметров, выходы которого связаны через третий блок коррекции с выходами системы и с выходами дисплея, при этом часть выходов системы подключена к входам блока выделения радиовидимых спутников, а часть выходов вычислителя навигационных параметров подключена к первой группе входов анализатора достоверности информации, другая группа входов которого соединена с выходами блока вычисления местоположения потребителя. Выходы анализатора через блок ключей связаны с входами навигационного фильтра, первая группа выходов которого соединена соответственно с входами двух блоков коррекции, а вторая группа выходов подключена к входам третьего блока коррекции.
Известная система довольно точно решает задачу навигации, но при этом требует ввода начальных данных о широте, долготе, высоте местоположения транспортного средства, а также ориентации относительно меридиана - азимуте, а также не обеспечивает формирование выходных сигналов, пропорциональных параметрам движения, полученным на основе только инерциальной информации. Расширенный состав выходных сигналов требуется, в частности, при использовании системы в пилотажно-навигационном комплексе самолетов.
Задачей настоящего изобретения является повышение автономности системы, расширение состава формируемых сигналов и повышение точности.
Для решения поставленной задачи предложена интегрированная инерциально-спутниковая навигационная система, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, в которую дополнительно введены блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, а выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно.
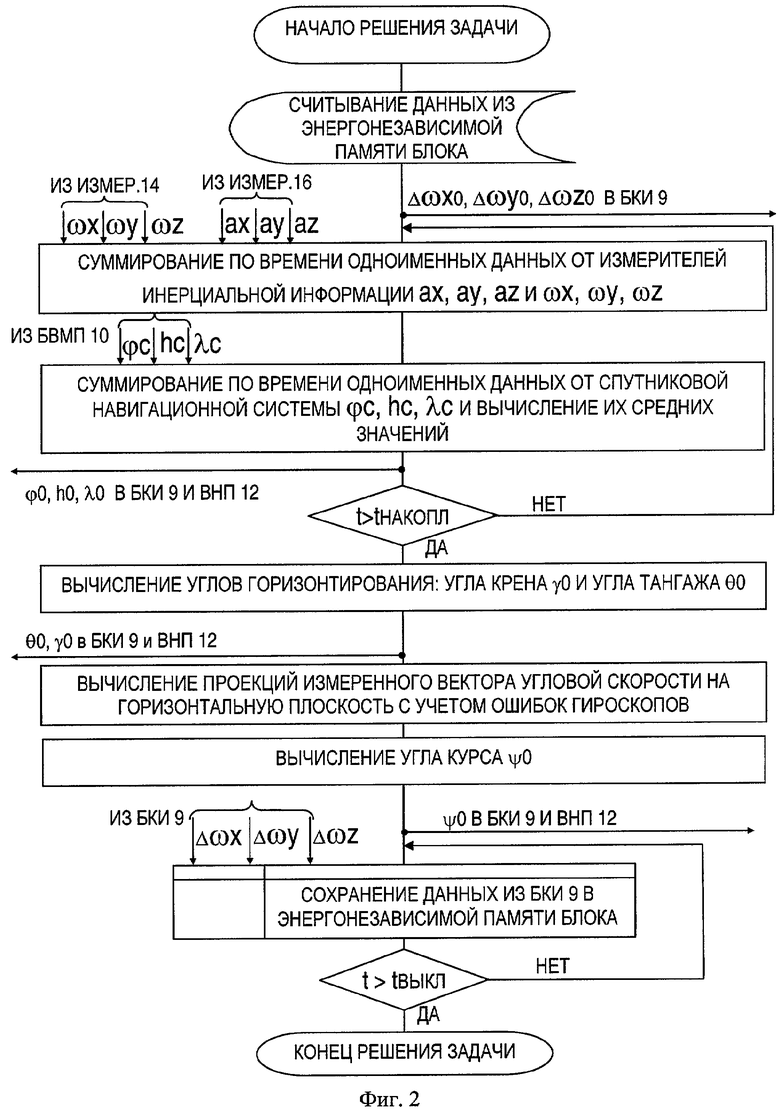
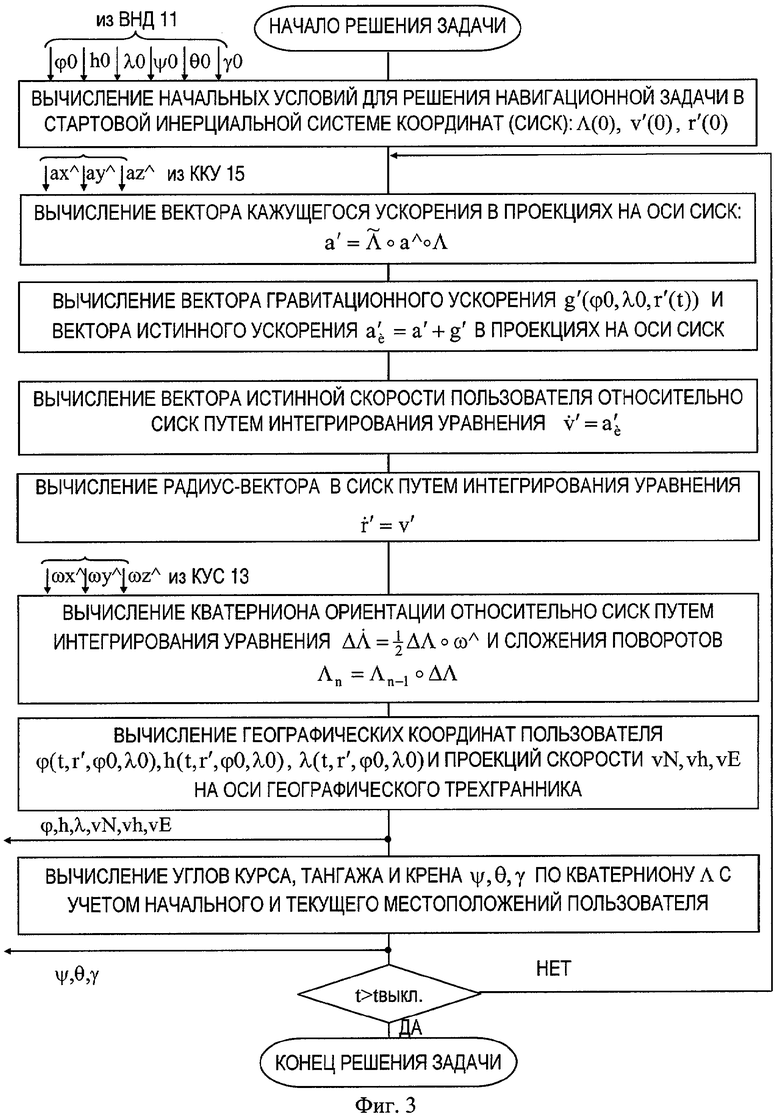
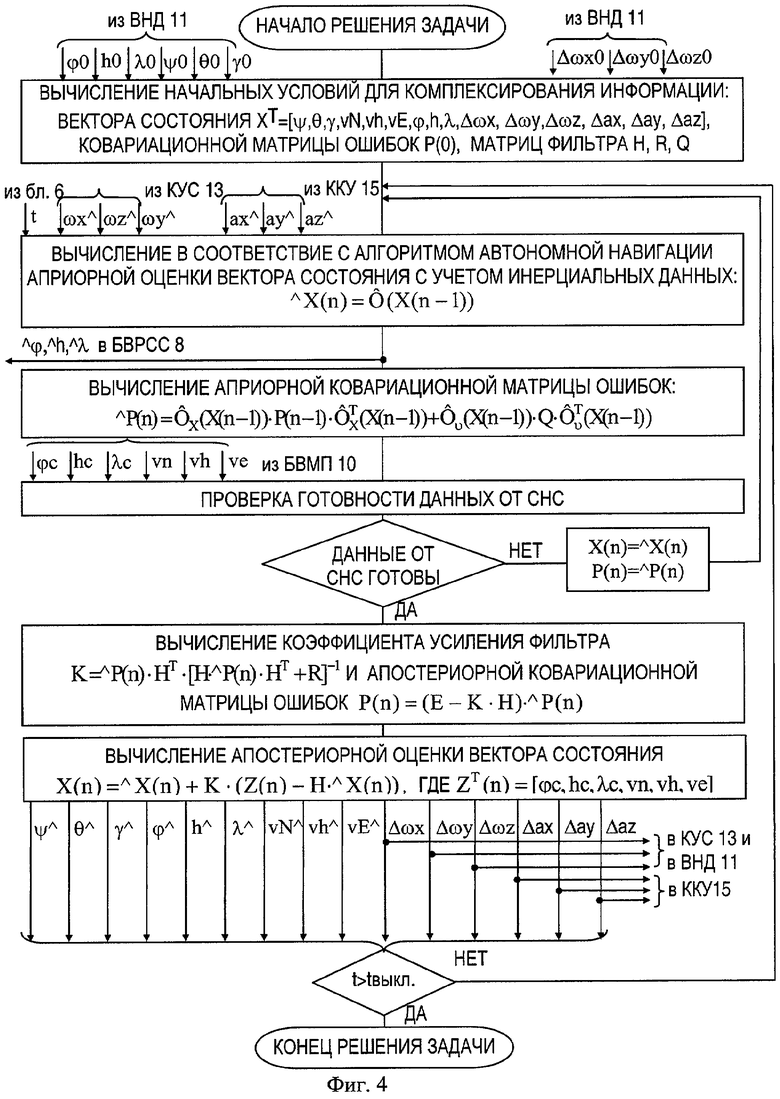
На фиг.1 приведена блок-схема предлагаемой системы; на фиг.2 - блок-схема алгоритма, реализованного в вычислителе начальных данных, на фиг.3 - блок-схема алгоритма, реализованного в вычислителе навигационных параметров; на фиг.4 - блок-схема реализованного в блоке комплексирования информации алгоритма обобщенной фильтрации.
Внутренняя структура блоков коррекции показана непосредственно на фиг.1.
Согласно прототипу в качестве измерителей трех проекций абсолютной угловой скорости и кажущегося ускорения могут быть использованы, например, три одноосных лазерных гироскопа и три акселерометра, оси которых образуют единую ортогональную систему координат, связанную с носителем системы.
Остальные блоки предлагаемой системы реализуют алгоритмы прототипа.
В соответствии с фиг.1 система содержит многоканальный радиоприемник 1 (РП), связанный через усилитель 2 (Ус) с антенной 3, а выходами подключенный к первой группе входов вычислителя 4 местоположения спутников (ВМС), вторая группа входов которого соединена с выходами блока 5 начальной установки альманаха данных о спутниках (БНУАДС), при этом синхронизирующий вход вычислителя 4 подключен к выходу таймера 6, а его выходы соединены с входами блока 7 выделения радиовидимых спутников (БВРВС). Выходы блока 7 соединены с первой группой входов блока 8 выбора рабочего созвездия спутников (БВРСС), вторая группа входов которого подключена к выходам с первого по третий блока 9 комплексирования информации (БКИ). Выходы блока 8 соединены с входами блока 10 вычисления местоположения пользователя (БВМП), подключенного тремя выходами с первого по третий к третьей группе входов вычислителя 11 начальных данных (ВНД) и к входам с семнадцатого по девятнадцатый блока 9 комплексирования информации, а тремя выходами с четвертого по шестой подключен к входам блока 9 с двадцатого по двадцать второй. Первая группа входов блока 9 комплексирования информации с первого по третий соединена с одноименными входами вычислителя 12 навигационных параметров (ВНП), выходы которого связаны с одноименными выходами системы, и подключена к одноименным выходам корректора 13 угловой скорости (КУС), три первых входа из шести которого соединены с одноименными выходами измерителя 14 проекций абсолютной угловой скорости (ИПАУС) и входами с первого по третий вычислителя 11 начальных данных, а входы с четвертого по шестой корректора 13 соединены соответственно с входами вычислителя 11 начальных данных с седьмого по девятый и подключены соответственно к выходам с тринадцатого по пятнадцатый блока 9 комплексирования информации. Входы с четвертого по шестой блока 9 комплексирования информации соединены с одноименными входами вычислителя 12 навигационных параметров и подключены соответственно к выходам корректора 15 кажущегося ускорения (ККУ), первые три входа которого соединены с четвертым, пятым и шестым входами вычислителя 11 начальных данных и подключены к одноименным выходам измерителя 16 проекций вектора кажущегося ускорения (ИПВКУ), а входы с четвертого по шестой корректора 15 подключены соответственно к выходам с шестнадцатого по восемнадцатый блока 9 комплексирования информации. Выходы с первого по третий вычислителя 11 начальных данных соединены с входами с седьмого по девятый блока 9 комплексирования информации, а выходы с четвертого по девятый подключены к входам с седьмого по двенадцатый вычислителя 12 навигационных параметров и к входам с десятого по пятнадцатый блока 9 комплексирования информации, шестнадцатый вход которого связан с выходом таймера 6, а выходы с четвертого по двенадцатый непосредственно соединены с выходами системы с десятого по восемнадцатый.
Предлагаемая интегрированная инерциально-спутниковая навигационная система (ИИСНС) работает следующим образом.
Исходной информацией для формирования выходных параметров ИИСНС являются сигналы с трех связанных с корпусом самолета и установленных ортогонально друг относительно друга гироскопов, входящих в состав измерителя 14 проекций абсолютной угловой скорости, и сигналы с трех аналогично расположенных акселерометров, входящих в измеритель 16 проекций вектора кажущегося ускорения.
Сигналы с гироскопов, пропорциональные проекциям вектора абсолютной угловой скорости ωx, ωy, ωz, и сигналы с акселерометров, пропорциональные проекциям вектора кажущегося ускорения ax, ay, az, поступают в вычислитель 11 начальных данных и через корректор 13 угловой скорости и корректор 15 кажущегося ускорения в блок 9 комплексирования информации, а также в вычислитель 12 навигационных параметров.
В ВНД поступают также сигналы, пропорциональные широте ϕс, высоте hc и долготе λс самолета из блока 10 вычисления местоположения пользователя приемника спутниковой информации, а также сигналы ошибок измерений проекций угловой скорости Δωx, Δωy, Δωz из БКИ для их запоминания в энергонезависимой памяти блока. В начальный момент времени эти сигналы отсутствуют.
В ВНД осуществляется подготовка начальных данных для БКИ и ВНП по следующему алгоритму (см. фиг.2). Сигналы ϕ0, h0, λ0, пропорциональные значениям широты, высоты и долготы местоположения самолета, получаются осреднением одноименных спутниковых сигналов на интервале времени накопления данных. Сигналы ψ0, θ0, γ0, соответственно пропорциональные начальным значениям угла курса, тангажа и крена самолета, определяются по алгоритму

где  ,
,  ,
,  - осредненные на интервале времени накопления данных сигналы ax, ay, az;
- осредненные на интервале времени накопления данных сигналы ax, ay, az;

 - горизонтальные проекции вектора измеренной угловой скорости с учетом начальных значений ошибок измерений;
- горизонтальные проекции вектора измеренной угловой скорости с учетом начальных значений ошибок измерений;
 ,
,  ,
,  - сигналы ωх, ωу, ωZ, осредненные на интервале времени накопления данных;
- сигналы ωх, ωу, ωZ, осредненные на интервале времени накопления данных;
Δωх0, Δωу0, Δωz0 - ошибки измерений проекций угловой скорости, полученные при предыдущем включении системы и считанные из энергонезависимой памяти ВНД. Учет ошибок измерений угловой скорости, сохраненных в энергонезависимой памяти в результате предыдущего включения системы, позволяет повысить точность гирокомпасирования в текущем включении и, соответственно, точность функционирования всей системы.
В КУС осуществляется учет ошибок измерений угловой скорости вращения путем суммирования сигналов, пришедших с ИПАУС, с сигналами, пропорциональными ошибкам гироскопов, оцениваемым в БКИ.
В ККУ осуществляется учет ошибок измерений кажущегося ускорения путем суммирования сигналов, пришедших с ИПВКУ, с сигналами, пропорциональными ошибкам акселерометров, оцениваемым в БКИ.
В ВНП по сигналам, поступающим из корректоров угловой скорости и кажущегося ускорения, с учетом начальных данных, поступивших из ВНД, осуществляется оперативное вычисление навигационных параметров: углов ориентации самолета относительно географического меридиана ψ и плоскости местного горизонта θ, γ; северной vN, вертикальной vh и восточной vE составляющих относительной скорости поступательного движения самолета, а также его географических координат ϕ, h, λ. Указанные параметры в виде соответствующих сигналов выдаются во внешние системы.
Порядок формирования выходных сигналов ВНП следующий (см. фиг.3). Все вычисления, связанные с обработкой сигналов, поступающих из блоков 13, 15, осуществляются для переменных, характеризующих состояние объекта в стартовой инерциальной системе координат, совпадающей с географической в точке старта, по следующему алгоритму.
В начальный момент времени по сигналам ψ0, θ0, γ0 вычисляется исходное значение кватерниона ориентации Λ0={λ0, λ1, λ2, λ3}:




Далее по формуле сложения поворотов для тактов счета n=1, 2, 3, ... вычисляется кватернион текущей ориентации самолета
в которой кватернион ΔΛ определяется как результат интегрирования уравнения  на такте счета при начальном условии ΔΛ(0)={1,0,0,0}, а ω^ формируется из сигналов ωx^, ωy^, ωz^.
на такте счета при начальном условии ΔΛ(0)={1,0,0,0}, а ω^ формируется из сигналов ωx^, ωy^, ωz^.
Далее, скорректированный вектор кажущегося ускорения a^, составленный из сигналов ax^, ay^, az, перепроецируется в стартовую инерциальную систему координат в соответствии со стандартным преобразованием  , после чего вычисляется истинное ускорение
, после чего вычисляется истинное ускорение  путем компенсации в показаниях акселерометров вектора гравитационного ускорения g', рассчитанного по математической модели с учетом текущего местоположения самолета и спроецированного на оси стартовой системы координат.
путем компенсации в показаниях акселерометров вектора гравитационного ускорения g', рассчитанного по математической модели с учетом текущего местоположения самолета и спроецированного на оси стартовой системы координат.
Вычисление вектора текущей скорости осуществляется в результате интегрирования уравнения 
при начальном значении V'(0)={0,0, Ω·R0cosϕ0}, где Ω - угловая скорость вращения Земли, R0 - длина радиус-вектора, соединяющего центр Земли с точкой старта.
Местоположение самолета в стартовой системе координат вычисляется путем интегрирования уравнения 
при нулевом начальном значении вектора r'.
Формирование выходных сигналов вычислителя 12 навигационных параметров ψ, θ, γ, ϕ, h, λ, vN, vh, vE осуществляется с учетом полученных значений кватерниона ориентации Λ, вектора абсолютной скорости v' и радиус-вектора r' по известным формулам.
Принимаемые антенной 3 сигналы от навигационных спутников через усилитель 2 поступают на многоканальный радиоприемник 1, который после их обработки выдает информацию о спутниках в вычислитель 4 местоположения спутников. Вычислитель 4 по данным об орбитах спутников, выдаваемым блоком 5 информации из радиоприемника 1 и по сигналу таймера 6, вычисляет местоположение спутников, из совокупности которых затем будет выбрана группа, обеспечивающая наилучшую точность навигационного решения.
Это осуществляется в блоке 8 выбора рабочего созвездия спутников, на входы которого, помимо спутниковой информации из блока 7, поступают из блока 9 сигналы ^ϕ, ^h, ^λ, пропорциональные географическим координатам самолета, полученным на основе инерциальных данных и соответствующим их априорной оценке в фильтре Калмана на момент прихода спутниковых сигналов. С учетом этих сигналов в блоке 8 осуществляется рациональный выбор рабочего созвездия спутников при количестве радиовидимых спутников, большем 4, повышающий достоверность и точность последующих навигационных решений.
Алгоритм такого выбора состоит в следующем:
1) По оценкам положения самолета (по сигналам из БКИ) и спутников (по сигналам из 4) определяются расчетные значения дальностей до каждого навигационного спутника, а также коридоры возможных значений псевдодальности;
2) С учетом всей имеющейся информации о среде распространения навигационного сигнала, состояниях шкал времени и проч. уточняются результаты измерения псевдодальностей по каждому навигационному спутнику и определяются невязки измерений как разности между измеренными (с учетом уточнений) и расчетными значениями;
3) Сравнивая значения невязок измерений с пороговым уровнем (исходя из коридора возможных значений), делается вывод о включении результата измерений в дальнейшую обработку, на основании чего формируется рабочее созвездие навигационных спутников.
Далее информация о спутниках, включенных в рабочее созвездие, поступает в блок 10 вычисления местоположения пользователя, в котором вырабатываются сигналы, пропорциональные координатам самолета ϕс, hc, λс и его скорости vn, vh, ve. Все указанные сигналы поступают в БКИ для коррекции навигационных параметров. Кроме того, сигналы ϕc, hc, λc поступают в ВНД для начальной выставки самолета при включении системы.
Комплексирование инерциальной и спутниковой информации осуществляется в блоке 9 комплексирования информации, на вход которого поступают сигналы скорректированной угловой скорости вращения из корректора 13 угловой скорости, скорректированного кажущегося ускорения из корректора 15 кажущегося ускорения, а также сигналы из блока 10 приемника спутниковой информации о местоположении и скорости самолета и сигнал секундной метки от таймера 6 для синхронизации инерциальной и спутниковой информации. После включения системы в блоке 9 комплексирования информации одноразово поступают также сигналы из ВНД о местоположении самолета ϕ0, h0, λ0, ориентации самолета ψ0, θ0, γ0 и ошибках гироскопов Δωx0, Δωy0, Δωz0. Выходные сигналы блока формируются в соответствии с алгоритмом обобщенного фильтра Калмана, блок-схема которого приведена на фиг.4, и включают в себя скорректированные значения местоположения самолета ϕ^, h^, λ^, скорости самолета vN^, vh^, vE^, ориентации самолета ψ^, θ^, γ^, выдаваемые во внешние системы, а также сигналы, пропорциональные ошибкам измерений гироскопов Δωx, Δωy, Δωz, поступающие в корректор 13 для коррекции текущих измерений угловой скорости и в вычислитель 11 для сохранения в энергонезависимой памяти, и ошибкам измерений акселерометров Δax, Δay, Δaz, поступающие в корректор 15 для коррекции текущих измерений кажущегося ускорения. Кроме того, на выходе БКИ формируются некорректированные от спутниковой информации сигналы ^ϕ, ^h, ^λ, которые поступают в блок 8 для оптимизации выбора рабочего созвездия спутников.
Таким образом, благодаря расширению состава выходных сигналов системы, в который включены, помимо указанных в прототипе, скорректированные углы ориентации самолета, а также координаты и скорость самолета, вычисляемые без спутниковой коррекции, увеличивается информационная ценность системы с точки зрения ее использования в составе пилотажно-навигационного комплекса самолета. Благодаря введению в состав системы вычислителя начальных данных, исключающего необходимость ввода начальных данных извне, повышается ее автономность. Кроме того, сохранение в энергонезависимой памяти вычислителя начальных данных ошибок измерений угловой скорости, полученных в предыдущем запуске системы, и их использование в текущем запуске повышает точность навигационной системы. Введение обратной связи от блока комплексирования информации к блоку выбора рабочего созвездия спутников, с помощью которой осуществляется отбор наиболее достоверной спутниковой информации при избыточном количестве радиовидимых спутников, повышает достоверность и точность навигационных определений системы в целом.
Источники информации
1. Заявка ЕПВ №0353849, G 01 S 5/14, 1989.
2. Патент РФ №2087867, G 01 C 23/00, 1993 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| ОТКАЗОУСТОЙЧИВАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА С ИЗБЫТОЧНЫМ КОЛИЧЕСТВОМ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2570358C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
Изобретение относится к навигационной технике и может быть использовано при проектировании комплексных навигационных систем. Интегрированная инерциально-спутниковая навигационная система содержит радиоприемник, соединенный через усилитель с антенной, выходами подключенный к вычислителю местоположения навигационных спутников, а входами к блоку начальной установки альманаха данных об орбитах спутников, выходы этого вычислителя соединены с входами блока выделения радиовидимых спутников, выходы которого подключены к первой группе входов блока выделения рабочего созвездия спутников, соединенного выходами с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, своими выходами соответственно через корректор угловой скорости и корректор кажущегося ускорения подключенные к первой группе входов вычислителя навигационных параметров, выходы которого соединены с первой группой выходов системы. В систему также входит вычислитель начальных данных, тремя группами входов подключенный соответственно к выходам измерителя проекций абсолютной угловой скорости и измерителя проекций вектора кажущегося ускорения, выходам блока комплексирования информации, а также выходам блока вычисления местоположения пользователя, при этом вычислитель начальных данных частью выходов подключен к входам вычислителя навигационных параметров, а всеми выходами к первой группе входов блока комплексирования информации, вторая группа входов которого связана с выходами корректора угловой скорости и корректора кажущегося ускорения, а третья группа входов подключена к выходам блока вычисления местоположения пользователя. Одна группа выходов блока комплексирования информации подключена ко второй группе входов блока выбора рабочего созвездия спутников, другая группа выходов непосредственно соединена с второй группой выходов системы, третья группа выходов подключена к входам корректора кажущегося ускорения, а четвертая группа выходов соединена с входами корректора угловой скорости и второй группой входов вычислителя начальных данных. Технический результат - повышение автономности системы, расширение состава формируемых сигналов, повышение точности. 4 ил.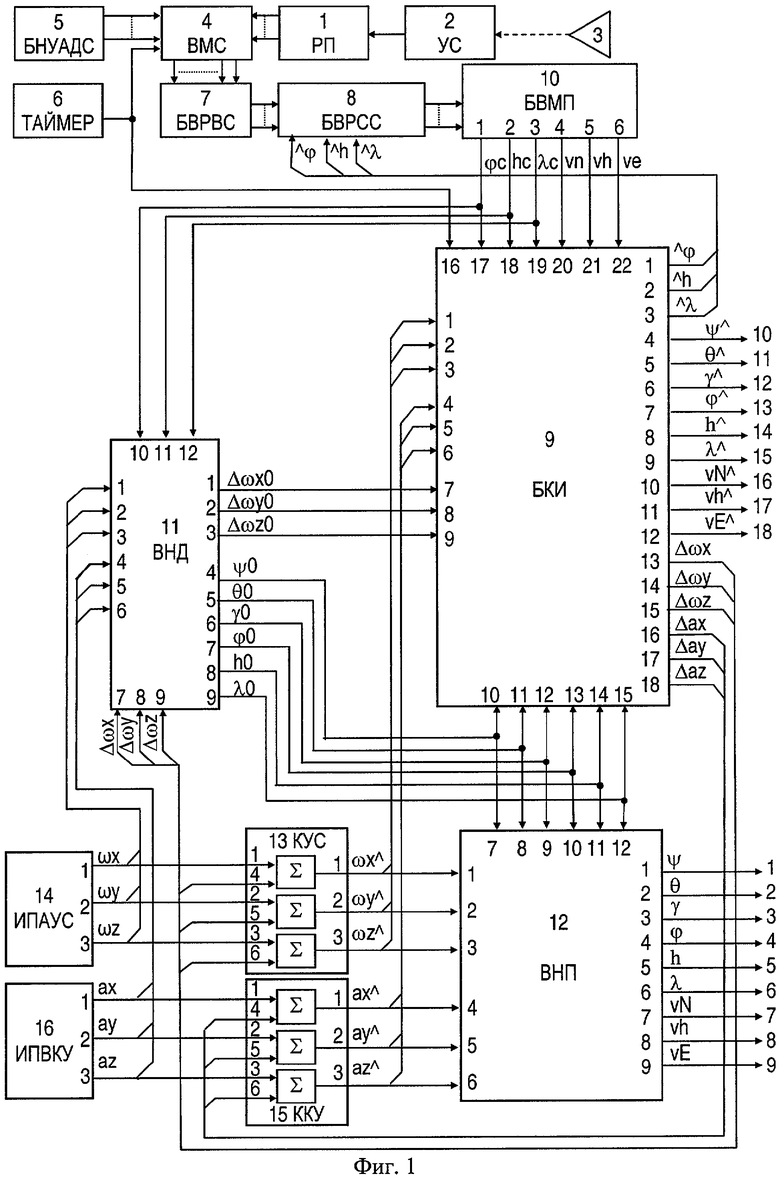
Интегрированная инерциально-спутниковая навигационная система, содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, отличающаяся тем, что в нее дополнительно введены блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, а выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно.
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| US 5841370 A, 24.11.1998 | |||
| US 5787384 A, 28.07.1998 | |||
| Агрегат восстановления железа | 2023 |
|
RU2815145C1 |

