Область техники, к которой относится изобретение
Настоящее изобретение относится к опорной структуре для датчика массы, используемого в весах, и более конкретно, относится к опорной структуре, снабженной функцией амортизации удара, для предотвращения того, чтобы чрезмерная нагрузка прикладывалась к датчику массы в случае перегрузки.
Уровень техники
Функция для амортизации перегрузки на чашу весов добавляется к обычным взвешивающим весам для того, чтобы уменьшать перегрузку, прикладываемую к датчику массы. Эта функция и функциональные компоненты именуются как амортизатор удара. Амортизатор удара снабжен пружинным элементом, который смещается, когда нагрузка, равная заданной допустимой нагрузке взвешивания +α, прикладывается между чашей и стопором чаши, или такой же тип пружинного элемента предусмотрен в участке плавающей рамы, который действует в качестве приемника нагрузки датчика.
Например, предлагается конфигурация, в которой пластинчатый пружинный элемент, имеющий форму буквы «с», помещен на стороне предварительной ступени подвижного конца в весах с динамометрическим датчиком, как раскрыто в патентном документе 1. Также в патентном документе 2 предлагается опорная структура для датчика массы, используемого в весах, в которой предусмотрена, по меньшей мере, одна опорная стойка, соединенная с датчиком массы, опорная пружина для поддерживания опорной стойки и направляющий элемент для ограничения перпендикулярного перемещения опорной стойки в положении, в котором установлена опорная стойка, на расстоянии от опорной пружины.
Однако традиционный амортизатор удара и опорная структура для датчика массы, используемого в весах, имеют следующие технические проблемы.
Патентный документ 1: японская выложенная публикация патента № 2001-91349.
Патентный документ 2: японская выложенная публикация патента № 2001-228016.
Раскрытие изобретения
Задачи, которые должно быть решены при помощи изобретения
Другими словами, все традиционные амортизаторы удара, включая патентный документ 1, имеют структуру, в которой пружинный элемент помещен на стороне предварительной ступени датчика массы. Поскольку ошибка измерения создается, когда нагрузка, которая может быть взвешена, не передается прямо к датчику массы, причем конфигурация сложная и эффективна только против перегрузки непосредственно сверху и не может эффективно защищать датчик массы от перегрузки в боковом направлении, создаваемой, когда используются весы.
Также в опорной структуре, предлагаемой в патентном документе 2, необходимы, по меньшей мере, три составляющих элемента, делая структуру сложной, обеспечивая только функцию смягчения толчков, прикладываемых в вертикальном направлении, и делая невозможной эффективную защиту датчика массы от перегрузки в боковом направлении.
Ввиду вышеизложенных традиционных проблем задачей настоящего изобретения является обеспечить опорную структуру для датчика массы, используемого в весах, в которой используется простая структура, и датчик массы, используемый в весах, может быть защищен от перегрузки не только в вертикальном направлении, но также во всех направлениях, включая боковое направление.
Средство, используемое, чтобы решать вышеупомянутые проблемы.
Настоящее изобретение, для того чтобы достичь вышеприведенной цели, обеспечивает опорную структуру для датчика массы, используемого в весах, содержащую часть плавающей рамы для воспринимания нагрузки, причем часть размещается в корпусе и предусмотрена на одной концевой стороне; и зафиксированную часть, предусмотренную на другой стороне, в которой вес объекта, который должен быть взвешен, помещенного на чашу весов, воспринимается воспринимающим участком, и обнаруживается масса объекта, который должен быть взвешен; опорная структура для датчика массы, используемого в весах, отличается тем, что содержит пружинный элемент для поддерживания датчика массы, причем элемент помещен между зафиксированной частью и корпусом, которые являются структурными компонентами, в которой пружинный элемент упруго деформируется заранее, чтобы тем самым нажимать/поджимать зафиксированную часть датчика массы для установления контакта со стороной структурного компонента, и упруго деформируется так, что зафиксированная часть отделяется от местоположения контакта, когда прикладывается сила, большая, чем сила нажатия/поджимания.
Согласно опорной структуре для датчика массы, используемого в весах, скомпонованной, как приведено выше, пружинный элемент, помещенный между зафиксированной частью и корпусом, которые являются структурными компонентами, упруго деформирован заранее, посредством чего зафиксированная часть датчика массы нажимается/поджимается для того, чтобы соприкасаться со стороной структурного элемента, и когда прикладывается сила большая, чем сила нажатия/поджимания, пружинный элемент упруго деформируется так, что зафиксированная часть отделяется от местоположения контакта. Поэтому когда нагрузка меньшая, чем сила нажатия/поджимания, передается прямо к датчику массы, и прикладывается перегрузка, большая, чем сила нажатия/поджимания, зафиксированная часть датчика массы отделяется от местоположения контакта, при этом перегрузка прикладывается к пружинному элементу, и пружинный элемент испытывает в этой точке упругую деформацию, посредством чего воздействие перегрузки амортизируется. Когда перегрузка устраняется, датчик массы возвращается к изначальному состоянию, когда пружинный элемент возвращен на прежнее место.
Такие функции смягчения и восстановления пружинного элемента демонстрируются по отношению к перегрузке не только в вертикальном направлении, но также в любом направлении, включая боковое направление. Также, поскольку этот результат получается просто при помещении пружинного элемента для поддерживания датчика массы между зафиксированной частью и структурными элементами корпуса, достаточно единственного составляющего элемента, и структура делается простой. Следовательно, надежность амортизатора удара улучшается.
В настоящем изобретении корпус может быть снабжен верхним и нижним корпусами, которые взаимно соответствуют друг другу, и местоположение контакта зафиксированной части может быть скомпоновано из части контакта датчика, свешенной из верхнего корпуса или сформированной вертикально на нижнем корпусе.
В настоящем изобретении позиционирующая часть зафиксированной части, скомпонованной из выступа, посадочной части или подобного может быть предусмотрена в части контакта датчика.
Пружинный элемент в настоящем изобретении может быть скомпонован из пластинчатой пружины, в которой боковая поверхность выполнена в форме буквы «с».
В настоящем изобретении пружинный элемент может быть скомпонован из пластинчатой пружины, в которой боковая поверхность имеет по существу форму кривошипа.
В настоящем изобретении зафиксированная часть датчика массы может иметь удлиненную часть, в которой одна концевая сторона удлинена за одно целое, и удлиненная часть используется в качестве пружинного элемента.
В настоящем изобретении местоположение соединения на стороне зафиксированной части датчика массы в пластинчатой пружине, выполненной в форме буквы «с», может иметь более узкую форму, чем часть основного тела.
Результат изобретения
Согласно опорной структуре для датчика массы, используемого в весах, в соответствии с настоящим изобретением, датчик массы может быть защищен от перегрузки не только от вертикального направления, но также от всех направлений, включая боковое направление, при использовании простой конфигурации.
Краткое описание чертежей
Фиг.1 - схематичный вид в поперечном разрезе, показывающий первый вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению;
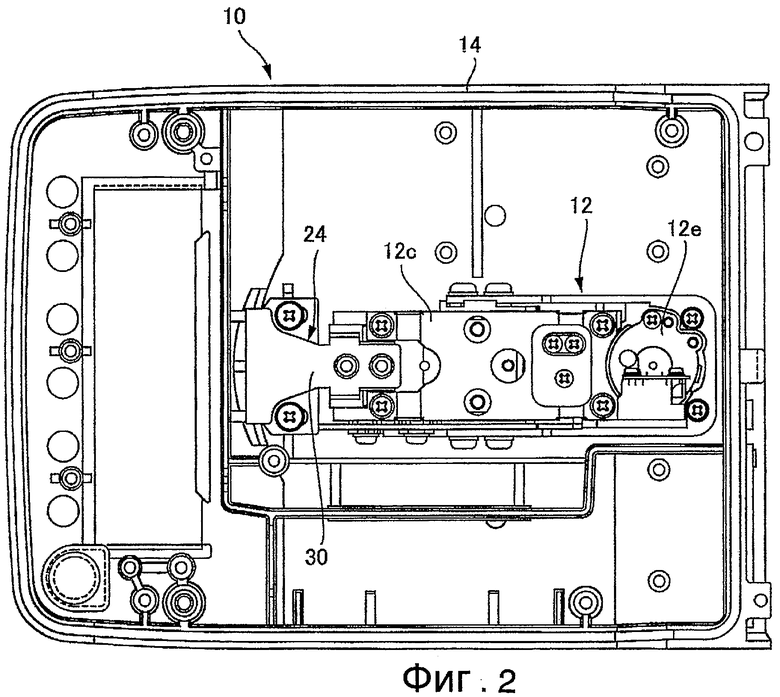
фиг.2 - вид сверху в направлении стрелки А на фиг.1, когда нижний корпус был удален в весах по фиг.1;
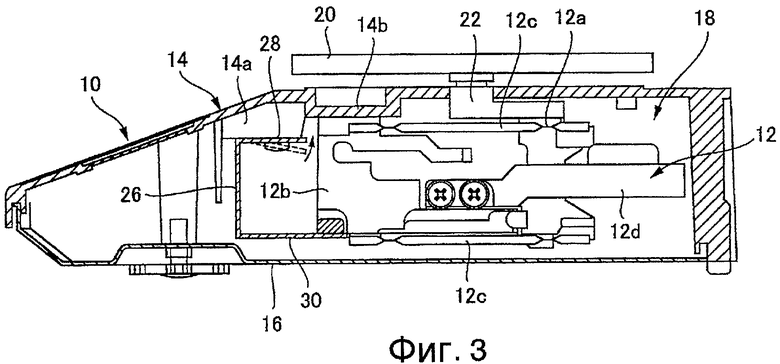
фиг.3 - схематичный вид в поперечном разрезе корпуса, в котором датчик массы смонтирован посредством пружинного элемента в опорной структуре, показанной на фиг.1;
фиг.4 - схематичный вид в поперечном разрезе корпуса, в котором перегрузка действует в весах на фиг.1;
фиг.5 - схематичный вид в поперечном разрезе, показывающий второй вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению;
фиг.6 - схематичный вид в поперечном разрезе, показывающий третий вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению;
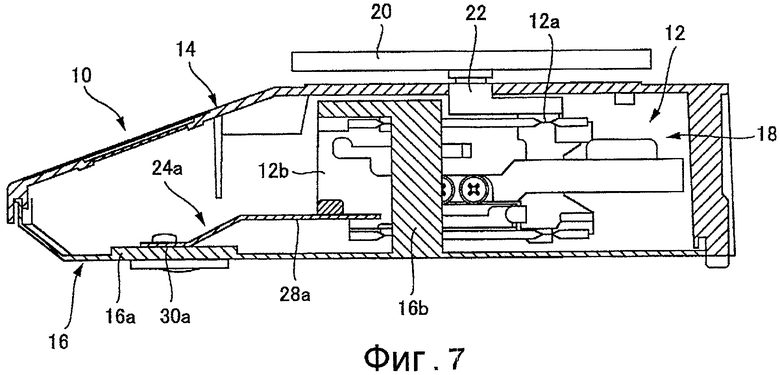
фиг.7 - схематичный вид в поперечном разрезе, показывающий четвертый вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению.
Предпочтительный вариант осуществления изобретения
Подходящие варианты осуществления настоящего изобретения будут описаны подробно ниже со ссылкой на прилагаемые чертежи. На фиг.1-4 показан первый вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению.
Вариант осуществления, показанный на этих чертежах, является случаем, в котором настоящее изобретение было применено к электронным весам с магнитным балансом. Электронные весы имеют корпус 10 и датчик 12 массы, размещенный в корпусе 10. Однако варианты осуществления настоящего изобретения не обязательно ограничены таким датчиком 12 массы с электронным балансом и могут также быть применены, например, к датчику массы с измерением деформации.
Корпус 10 снабжен верхним корпусом 14 и нижним корпусом 16, чьи периферические края пригнаны друг к другу. Пространство 18 отгорожено в корпусе 10, и датчик 12 массы располагается в пространстве 18.
Датчик 12 массы, согласно настоящему варианту осуществления, является датчиком с магнитным балансом и снабжен участком 12a плавающей рамы, расположенным на одном конце с тем, чтобы быть способным к перемещению в вертикальном направлении, и зафиксированную часть 12b, расположенную на другом конце, обращенную к участку 12a плавающей рамы.
Множество подставок 12c, размещенных параллельно, чтобы образовывать механизм Роберваля, предусмотрены в верхней и нижней поверхностях датчика 12 массы, а также предусмотрены рычаг 12d для передачи нагрузки и основное тело датчика 12e с магнитным балансом.
Передающий нагрузку элемент 22, расположенный выступающим образом на нижней поверхности чаши 20 весов, зафиксирован к верхней поверхности участка 12a плавающей рамы. Участок 12a плавающей рамы - это воспринимающий участок для воспринимания нагрузки объекта, который должен быть взвешен, который помещают на чашу 20 весов.
Опорная структура для датчика 12 массы сконфигурирована, как описано ниже в случае настоящего варианта осуществления. Датчик 12 массы имеет пружинный элемент 24, помещенный между зафиксированной частью 12b датчика массы и нижней поверхностью верхнего корпуса 14, и тем самым поддерживается плавающим образом, так что нижняя концевая поверхность датчика 12 массы устанавливается на заданном расстоянии вверх от верхней поверхности нижнего корпуса 16.
Пружинный элемент 24, согласно настоящему варианту осуществления, - это пластинчатая пружина, в которой боковая поверхность, имеющая основную секцию 26 и пару первого и второго подвижных элементов 28, 30, обращенных к двум концам основной секции 26, сформирована в форме буквы «с» и формируется сгибанием двух концов листообразной металлической пластины заданной ширины по существу на 90° с тем, чтобы быть обращенными друг к другу.
Этот тип пружинного элемента 24 имеет первый подвижный кусок 28, который находится на верхней стороне, зафиксированный к фиксирующей пружину части 14a, за одно целое свешенной из нижней поверхности верхнего корпуса 14, и второй подвижный кусок 30, который находится на нижней стороне, зафиксированный к нижней поверхности зафиксированной части 12b датчика 12 массы.
Когда пружинный элемент 24 используется, чтобы поддерживать датчик 12 массы, один из подвижных элементов 28 сгибается и упруго деформируется заранее, с тем чтобы приближать другой подвижный кусок 30, как показано пунктирной линией на фиг.3, так что прикладывается смещенная нагрузка, когда датчик 12 массы поддерживается.
Другими словами, когда первый подвижный кусок 28 сгибают заранее, с тем чтобы приближать другой подвижный кусок 30, как показано пунктирной линией на фиг.3, и первый подвижный кусок 28 прикреплен винтами к плоской поверхности, фиксирующей пружину части 14a, состояние приводит к тому, что второй подвижный кусок 30 переместился вверх на расстояние, соизмеримое с величиной сгибания, осуществленного заранее.
Когда второй подвижный кусок 30 движется вверх, датчик 12 массы также движется вверх в сопровождении с движением. Часть 14b контакта датчика предусмотрена в верхней концевой стороне датчика 12 массы, причем часть располагается рядом с верхней поверхностью зафиксированной части 12b, близко к стороне фиксирующей пружину части 14a и свешена так, чтобы формировать ступень.
В таком типе взаимного расположения, когда датчик 12 массы движется над вторым подвижным элементом 30, верхняя концевая поверхность зафиксированной части 12b создает контакт, с тем чтобы нажимать на нижнюю поверхность части 14b контакта датчика.
Также возможно, например, снабжать часть 14b контакта датчика выступом, который сцепляется с и позиционирует верхний концевой край зафиксированной части 12b, или предусматривать вогнутость, которая соответствует внешней периферической форме зафиксированной части 12b и садится на зафиксированную часть 12b, чтобы тем самым позиционировать зафиксированную часть.
Также в настоящем варианте осуществления пружинный элемент 24 снабжен удлиненным участком, сформированным за одно целое на нижней концевой части зафиксированной части 12b датчика 12 массы, и удлиненный участок согнут в заданную форму, чтобы тем самым составлять пружинный элемент 24.
Сила нажатия/поджимания в этом случае может быть отрегулирована, используя смещенную нагрузку пружинного элемента 24. Смещенная нагрузка устанавливается к нагрузке, в которой заданный коэффициент безопасности α добавляется к наибольшему значению, которое может быть взвешено весами. В случае настоящего варианта осуществления второй подвижный кусок 30 сформирован более узкой формы так, чтобы иметь по существу 1/2 ширины основной секции 26 и первого подвижного элемента 28, как показано на фиг.1.
В весах, снабженных опорной структурой для датчика массы, сконфигурированной описанным выше образом, когда объект, который должен быть взвешен, вплоть до наибольшей массы, которая может быть измерена с заданной точностью, помещен на чашу 20 весов, как показано на фиг.3, нагрузка объекта, который должен быть взвешен, меньше, чем смещенная нагрузка, с которой зафиксированная часть 12b датчика 12 массы прижата и поджата к части 14b контакта датчика. Поэтому зафиксированная часть 12b поддерживается в таком состоянии контакта, без ее отделения от нижней поверхности части 14b контакта датчика, притом нагрузка объекта, который должен быть взвешен, прикладывается к датчику 12 массы, и значение нагрузки измеряется с заданной точностью.
С другой стороны, когда сила (перегрузка W) большая, чем сила нажатия/поджимания, в силу чего чаша 20 весов вынуждена двигаться вниз, прикладывается на переднюю сторону чаши 20 весов, зафиксированная часть 12b отделяется вниз от части 14b контакта датчика, как показано на фиг.4.
Другими словами, например, когда перегрузка W большая, чем сила нажатия/поджимания прикладывается к чаше 20 весов, зафиксированная часть 12b датчика 12 массы преодолевает силу поджимания пружинного элемента 24 и отделяется от части 14b контакта датчика верхнего корпуса 14 на расстояние, соразмерное с заданным интервалом δ, как показано на фиг.4.
Когда датчик 12 массы отделяется от части 14b контакта датчика таким путем, перегрузка W прикладывается к пружинному элементу 24 и в результате этого пружинный элемент 24 испытывает в это время упругую деформацию, посредством чего воздействие перегрузки амортизируется. Когда перегрузка W устраняется, датчик 12 массы возвращается к изначальному состоянию, когда пружинный элемент 24 возвращен на прежнее место.
Функции смягчения и восстановления пружинного элемента 24 демонстрируются в отношении перегрузки W не только в вертикальном направлении, но также от любого направления, включая боковое направление. Также, поскольку этот результат получается просто при помещении пружинного элемента 24 для поддерживания датчика 12 массы между зафиксированной частью 12b и частью 14b контакта датчика, достаточно единственного составляющего элемента, и структура делается простой.
На фиг.5 показан второй вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению. Таким же или соответствующим частям к первому варианту осуществления присвоены те же ссылочные цифры, и подробное описание их пропущено. В дальнейшем описаны только отличительные признаки.
Опорная структура для датчика 12 массы, согласно настоящему варианту осуществления, имеет пружинный элемент 24, помещенный между зафиксированной частью 12b и стороной нижней поверхности верхнего корпуса 14 таким же образом, как в первом варианте осуществления, и тем самым поддерживается плавающим образом так, что нижняя концевая поверхность датчика 12 массы установлена на заданном расстоянии вверх от верхней поверхности нижнего корпуса 16.
Пружинный элемент 24, также как в варианте осуществления, описанном выше, является пластинчатой пружиной, в которой боковая поверхность, имеющая основную секцию 26 и пару первого и второго подвижных элементов 28, 30, обращенных к двум концам основной секции 26, сформирована в форме буквы «с» и формируется сгибанием двух концов листообразной металлической пластины, имеющей заданную ширину, по существу на 90°, с тем чтобы быть обращенными друг к другу.
Пружинный элемент 24 имеет первый подвижный элемент 28, прикрепленный к фиксирующей пружину части 14a, свешенной как одно целое из нижней поверхности верхнего корпуса 14, и второй подвижный элемент 30, который является другим элементом пары, прикрепленный к нижней поверхности зафиксированной части 12b датчика 12 массы.
Когда пружинный элемент 24 используется, чтобы поддерживать датчик 12 массы, один из подвижных элементов 28 сгибают и упруго деформируют заранее, с тем чтобы приближать другой подвижный элемент 30 таким же образом, как в варианте осуществления, описанном выше, так что прикладывается смещенная нагрузка, когда датчик 12 массы поддерживается.
С другой стороны, часть 16b контакта датчика, имеющая по существу форму буквы «L», сформированная вертикально и обращенная вверх от нижней поверхности нижнего корпуса 16, предусмотрена в верхней концевой стороне датчика 12 массы. Часть 16b контакта датчика сконструирована так, что смещенная нагрузка прикладывается к пружинному элементу 24, и когда фиксирована на фиксирующей пружину части 14a, верхняя концевая поверхность зафиксированной части 12b приводится в контакт, чтобы быть прижатой к нижней поверхности части 16b контакта датчика, когда датчик 12 массы также движется вверх совместно с движением вверх подвижного элемента 30. Сила нажатия/поджимания в это время устанавливается к той же нагрузке, как в варианте осуществления, описанном выше.
Во втором варианте осуществления, сконфигурированном таким образом, демонстрируется то же поведение, как в первом варианте осуществления, и тот же рабочий результат может быть достигнут в каждом из случаев, в которых объект, который должен быть взвешен и который находится в пределах наибольшей массы, которая может быть измерена с заданной точностью, помещается на чашу 20 весов и прикладывается перегрузка W.
На фиг.6 показан третий вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению. Таким же или соответствующим частям к первому варианту осуществления присвоены те же ссылочные цифры, и подробное описание их пропущено. В дальнейшем описаны только отличительные признаки.
Опорная структура для датчика 12 массы, согласно настоящему варианту осуществления, имеет пружинный элемент 24a, помещенный между зафиксированной частью 12b датчика 12 массы и стороной верхней поверхности нижнего корпуса 16 таким же образом, как в первом варианте осуществления, посредством чего нижняя концевая поверхность датчика 12 массы поддерживается плавающим образом, чтобы быть отделенной вверх от верхней поверхности нижнего корпуса 16 на заданное расстояние.
В случае настоящего варианта осуществления пружинным элементом 24a является пластинчатая пружина, в которой боковая поверхность, имеющая основную секцию 26a и пару первого и второго подвижных элементов 28a, 30a, простертых от двух концов основной секции 26a, сформирована по существу в форме кривошипа и формируется сгибанием двух концов листообразной металлической пластины, имеющей заданную ширину, так чтобы были параллельны друг другу.
Пружинный элемент 24a сконфигурирован так, что первый подвижный кусок 28a зафиксирован на фиксирующей пружину части 16a, сформированной выступающим образом и за одно целое на нижней поверхности нижнего корпуса 16, и второй подвижный кусок 30a зафиксирован к нижней поверхности зафиксированной части 12b датчика 12 массы.
Когда пружинный элемент 24a используется, чтобы поддерживать датчик 12 массы, один из подвижных элементов 28a сгибается и вынужден упруго деформироваться заранее, с тем чтобы приближать другой подвижный кусок 30a таким же образом, как в вышеприведенном варианте осуществления, так что смещенная нагрузка прикладывается, когда датчик 12 массы поддерживается.
С другой стороны, часть 14b контакта датчика, которая выступает вниз в форме ступени по направлению к стороне верхнего конца датчика 12 массы, предусмотрена на стороне нижней поверхности верхнего корпуса 14. Часть 14b контакта датчика сконфигурирована так, что когда смещенная нагрузка прикладывается к пружинному элементу 24a, который зафиксирован на фиксирующей пружину части 16a, поверхность верхнего конца зафиксированной части 12b приводится в контакт с и вынуждается нажимать на нижнюю поверхность части 14b контакта датчика, когда датчик 12 массы движется вверх совместно с движением вверх подвижного элемента 30a. Сила нажатия/поджимания в это время устанавливается к той же нагрузке, как в варианте осуществления, описанном выше.
В третьем варианте осуществления, сконфигурированном таким образом, что когда объект, который должен быть взвешен, находится в пределах наибольшей массы, которая может быть измерена с заданной точностью, помещен на чашу 20 весов, нагрузка объекта, который должен быть взвешен, меньше, чем смещенная нагрузка, с которой зафиксированная часть 12b датчика массы нажимается/поджимается к части 14b контакта датчика. Поэтому зафиксированная часть 12b поддерживается в таком состоянии контакта, без ее отделения от нижней поверхности части 14b контакта датчика, притом нагрузка объекта, который должен быть взвешен, прикладывается к датчику 12 массы, и значение нагрузки измеряется с заданной точностью.
С другой стороны, когда большая сила (перегрузка), большая, чем сила нажатия/поджимания, которая заставляет чашу 20 весов двигаться вниз, прикладывается на переднюю сторону чаши 20 весов, сила поджимания пружинного элемента 24a преодолевается, и зафиксированная часть 12b отделяется вниз от части 14b контакта датчика. Следовательно, перегрузка W прикладывается к пружинному элементу 24a, и пружинный элемент 24a подвергается в это время упругой деформации, посредством чего воздействие перегрузки амортизируется.
Когда перегрузка W устранена, датчик 12 массы возвращен к изначальному состоянию посредством восстанавливающего воздействия пружинного элемента 24. Получается такой же рабочий результат, как в первом варианте осуществления.
На фиг.7 показан четвертый вариант осуществления опорной структуры для датчика массы, используемого в весах, согласно настоящему изобретению. Таким же или соответствующим частям к первому варианту осуществления присвоены те же ссылочные цифры и подробное описание их пропущено. В дальнейшем описаны только отличительные признаки.
В опорной структуре для датчика 12 массы, согласно настоящему варианту осуществления, пружинный элемент 24a, имеющий такую же форму, как в третьем варианте осуществления, помещен между зафиксированной частью 12b датчика 12 массы и стороной верхней поверхности нижнего корпуса 16, посредством чего поверхность нижнего конца датчика 12 массы поддерживается плавающим образом с тем, чтобы быть отделенной вверх от верхней поверхности нижнего корпуса 16 на заданное расстояние.
Также как в третьем варианте осуществления пружинный элемент 24a - это пластинчатая пружина, в которой боковая поверхность, имеющая основную секцию 26a и пару первого и второго подвижных элементов 28a, 30a, простертых от двух концов основной секции 26a, сформирована по существу в форме кривошипа.
Также как в третьем варианте осуществления, первый подвижный элемент 28a пружинного элемента 24a зафиксирован к фиксирующей пружину части 16a, которая сформирована выступающим образом и за одно целое на нижней поверхности нижнего корпуса 16; второй подвижный элемент 30а зафиксирован на нижней поверхности зафиксированной части 12b датчика 12 массы; и смещенная нагрузка прикладывается в этой ситуации.
С другой стороны, часть 16b контакта датчика, имеющая по существу форму буквы «L», сформированная вертикально и обращенная вверх от нижней поверхности нижнего корпуса 16, предусмотрена в верхней концевой стороне датчика 12 массы. Часть 16b контакта датчика сконструирована так, что смещенная нагрузка прикладывается к пружинному элементу 24, и когда зафиксирована к фиксирующей пружину части 14a, верхняя концевая поверхность зафиксированной части 12b приводится в контакт, чтобы быть прижатой к нижней поверхности части 16b контакта датчика, когда датчик 12 массы также движется вверх в сопровождении с движением вверх подвижного элемента 30a. Сила нажатия/поджимания в это время устанавливается к той же нагрузке, как в первом варианте осуществления.
В четвертом варианте осуществления, сконфигурированном таким путем, демонстрируется такое же поведение, как в третьем варианте осуществления, и такой же рабочий результат может быть достигнут в каждом из случаев, в которых объект, который должен быть взвешен, находится в пределах наибольшей массы, которая может быть измерена с заданной точностью, помещается на чашу 20 весов и прикладывается перегрузка W.
В вариантах осуществления, описанных выше, был описан случай, в котором пластинчатая пружина используется как средство, чтобы поддерживать плавающим образом датчик 12 массы. Однако выполнение настоящего изобретения не обязательно ограничено этими вариантами осуществления, и, например, может быть использована винтовая пружина.
Промышленная применимость
Согласно опорной структуре для датчика массы, используемого в весах в соответствии с настоящим изобретением, датчик массы может быть защищен от перегрузки не только в вертикальном направлении, но также во всех направлениях, включая боковое направление, при использовании простой конфигурации, и поэтому технология может быть эффективно применена в областях, в которых используется такая конфигурация.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533956C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2801194C2 |
| ДАТЧИК МАССЫ | 2014 |
|
RU2660399C1 |
| Опорный блок для колонны с электропогружным насосом с перемещающимися полостями | 2016 |
|
RU2730189C2 |
| ЗАЖИМНОЕ УСТРОЙСТВО РУЧНОЙ МАШИНЫ И РУЧНАЯ МАШИНА. | 2011 |
|
RU2588909C2 |
| ВЫТАЛКИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ВЫСТАВЛЕННЫХ ТОВАРОВ | 2011 |
|
RU2549322C2 |
| ПОГЛОЩАЮЩЕЕ ИЗДЕЛИЕ, ИМЕЮЩЕЕ СВОЙСТВА МАСКИРОВАНИЯ ПЯТЕН | 2005 |
|
RU2387431C2 |
| ПЕРЕНОСНАЯ ТЕХНОЛОГИЧЕСКАЯ МАШИНА С ЗАЖИМНЫМ УСТРОЙСТВОМ ДЛЯ ЗАКРЕПЛЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА | 2011 |
|
RU2596541C2 |
| УСТРОЙСТВО ЭЛЕКТРОННОЙ СХЕМЫ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2617284C2 |
| ТОНЕР-КАРТРИДЖ СО СЧЕТЧИКОМ | 2014 |
|
RU2589241C9 |



Настоящее изобретение относится к опорной структуре для датчика массы, используемого в весах. Опорная структура содержит часть плавающей рамы для воспринимания нагрузки, причем часть размещается в корпусе и предусмотрена на одной концевой стороне; и зафиксированную часть, предусмотренную на другой стороне, в которой вес объекта, который должен быть взвешен, помещенного на чаше весов, воспринимается воспринимающим участком, и обнаруживается масса объекта, который должен быть взвешен. Опорная структура дополнительно содержит пружинный элемент для поддерживания упомянутого датчика массы, помещенный между зафиксированной частью и корпусом, которые являются структурными компонентами. Пружинный элемент упруго деформируется заранее, чтобы тем самым нажимать/поджимать зафиксированную часть датчика массы, чтобы создавать контакт со стороной структурного компонента, и упруго деформируется так, что зафиксированная часть отделяется от местоположения контакта, когда прикладывается сила, большая, чем сила нажатия/поджимания. Технический результат: возможность защиты датчика массы от перегрузки не только в вертикальном направлении, но также во всех направлениях, включая боковое направление, при использовании простой конфигурации. 8 з.п. ф-лы, 7 ил.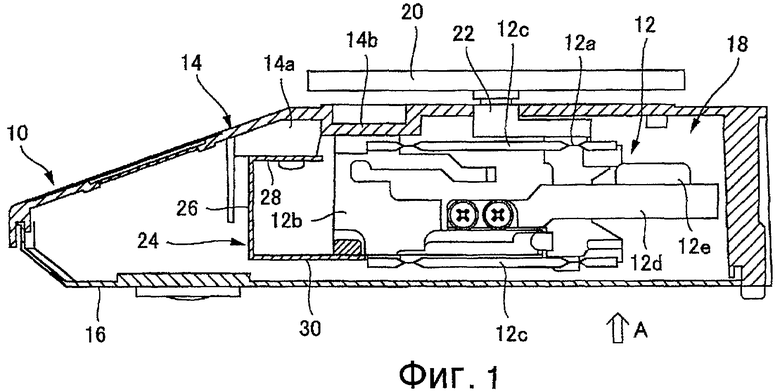
1. Опорная структура для датчика массы, используемого в весах, содержащая часть плавающей рамы для воспринимания нагрузки, причем часть размещается в корпусе и предусмотрена на одной концевой стороне; и зафиксированную часть, предусмотренную на другой стороне, в которой вес объекта, который должен быть взвешен, помещенного на чаше весов, воспринимается воспринимающим участком, и обнаруживается масса объекта, который должен быть взвешен, при этом опорная структура для датчика массы, используемого в весах, отличается тем, что содержит:
пружинный элемент для поддерживания упомянутого датчика массы, помещенный между зафиксированной частью и корпусом, которые являются структурными компонентами, при этом
пружинный элемент упруго деформируется заранее, чтобы тем самым нажимать/поджимать зафиксированную часть датчика массы, чтобы создавать контакт со стороной структурного компонента, и упруго деформируется так, что зафиксированная часть отделяется от местоположения контакта, когда прикладывается сила, большая, чем сила нажатия/поджимания.
2. Опорная структура по п.1, отличающаяся тем, что:
корпус снабжен верхним и нижним корпусами, которые взаимно соответствуют друг другу; и
местоположение контакта зафиксированной части скомпоновано из части контакта датчика, свешенной из верхнего корпуса или вертикально сформированной на нижнем корпусе.
3. Опорная структура по любому из пп.1 или 2, отличающаяся тем, что имеет позиционирующую часть зафиксированной части, скомпонованную из выступа, посадочной части или подобного на части контакта датчика.
4. Опорная структура по п.1 или 2, отличающаяся тем, что пружинный элемент скомпонован из пластинчатой пружины, в которой боковая поверхность выполнена в форме буквы «с».
5. Опорная структура по п.3, отличающаяся тем, что пружинный элемент скомпонован из пластинчатой пружины, в которой боковая поверхность выполнена в форме буквы «с».
6. Опорная структура по п.1 или 2, отличающаяся тем, что пружинный элемент скомпонован из пластинчатой пружины, в которой боковая поверхность имеет, по существу, форму кривошипа.
7. Опорная структура по п.3, отличающаяся тем, что пружинный элемент скомпонован из пластинчатой пружины, в которой боковая поверхность имеет, по существу, форму кривошипа.
8. Опорная структура по п.6, отличающаяся тем, что зафиксированная часть датчика массы имеет удлиненную часть, в которой одна концевая сторона удлинена как одно целое, и удлиненная часть используется в качестве пружинного элемента.
9. Опорная структура по п.4, отличающаяся тем, что местоположение соединения на стороне зафиксированной части датчика массы в месте пластинчатой пружины, выполненной в форме буквы «с», имеет более узкую форму, чем часть основного тела.
| Электромагнитные цифровые весы | 1989 |
|
SU1657973A1 |
| ДЕРЖАТЕЛЬ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА К УСТРОЙСТВУ ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ПОТОКА СРЕДЫ И СПОСОБ ИЗГОТОВЛЕНИЯ ДЕРЖАТЕЛЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА | 1995 |
|
RU2151381C1 |
| ТЕРМОАНЕМОМЕТРИЧЕСКИЙ ДАТЧИК МАССОВОГО РАСХОДА ВОЗДУХА (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2201581C2 |
| Пленочный ороситель | 1983 |
|
SU1118844A1 |

