Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точ- ности.
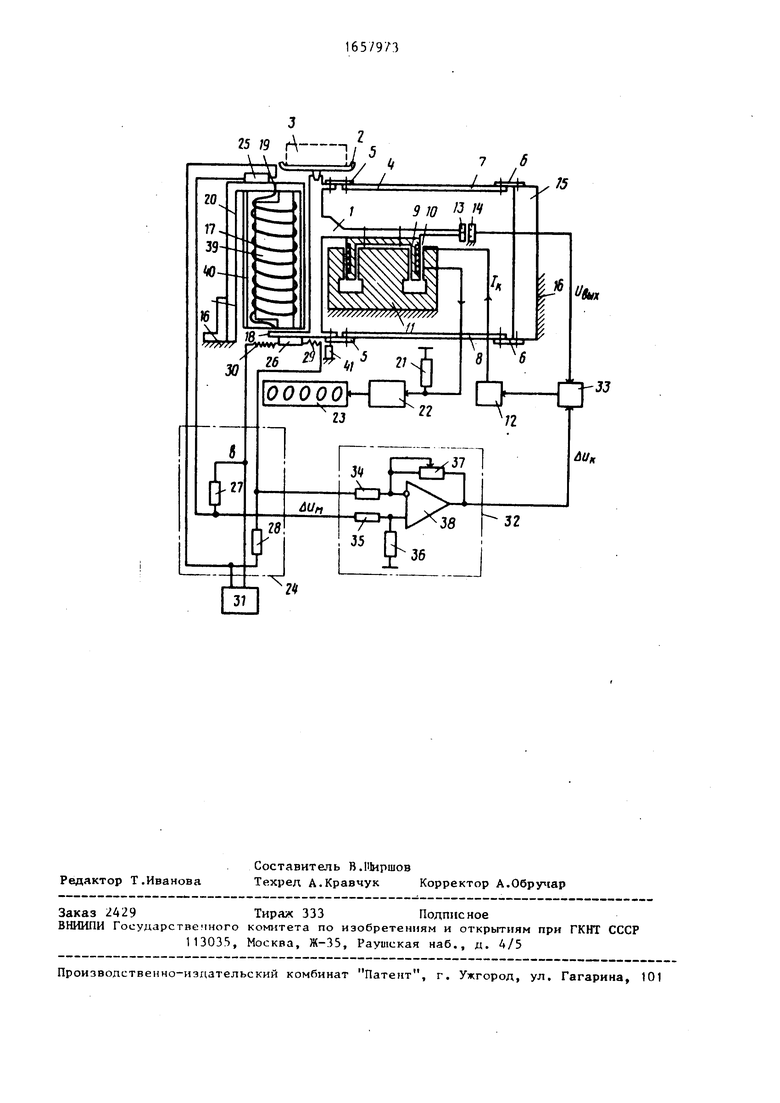
На чертеже показана схема элект- ррмагнитных цифровых весов.
Весы содержат подвижный чувствительный элемент 1 с верхней грузопри- емной чашкой 2 для измеряемого груза 3, закрепленный на упругодеформи- руемой подвеске 4, например, парал- лелограммного типа, состояли из упругих опор 5 и 6 и промежуточных пластин 7 и 8. Чувствительный элемент 1 снабжен катушкой 9, размещенной в зазоре 10 электромагнитного
компенсатора 11, вход которой соединен с выходом усилителя 12 и флажком 13 датчика 14 разбаланса. Упругоде- формируемая подвеска 4 закреплена с помощью упругих опор 6 на стойке 15 основания 16. Упругодеформируемая система 17 выполнена, например, в виде компенсационной пружины и одним своим концом 18 закреплена на чувствительном элементе 1, а другим концом 19 - на основании 20.
Весы содержат также опорный резистор . 1, аналого-цифровой преобразователь 22, цифровой индикатор 23, мостовую измерительную схему 24, образованную первым 75 и вторым 26 термочувстел
оо
витальными резнстивными элементами, расположенными соответственно на основании 20 и чувствительном элементе 1 в зонах крепления концов 18,19 упруго деформируемой системы (пружины; 1/, и резисторами 2/ и 23.
Элемент 26 снабжен белмоментными токоподводами 29 и 30.
Кроме того, в весах имеются игточ- ник питания 31, формирователь .V. корректирующего сигнала и сумматор 33 аналоговых сигналов.
Формирователь 32 корректирующего сигнала выполнен в виде балластных резисторов ЗА и 35, согласующего резистора 36, резистора 3/ обратной связи и дифференциального усилителя 38 постоянного тока.
Точки а и b (см. чертеж) являются диагональными точками мостовой измерительной схемы 24 и подключены к источнику питания 31, а две другие диагональные точки этой схемы end подключены к формирователю 32.
Для повышения точности системы коррекции в весы дополнительно введены компенсатор 39 градиента темпера - туры (компенсационной пружины 1/) в виде внутреннего сплошного черного цилиндра и тепловой экран 41 в виде внешнего тонкостенного цилиндра, полированного снаружи и изнутри. Как компенсатор 39, так и тепловой экран 40 максимально перекрывают по длине пружину 1/, обеспечивая необходимый зазор между ней и чувствительным элементом 1 для смещения его при измерении. Упор 41 служит для ограничения смещения чувствительно- го элемента 1.
ш
Весы работают следующим образом.
В общем случае влияние температуры на результирующую погрешность 4F(t°) носит линейный характер и описывается выражением
Д F(t° )Ј;-%,
, де С - начальн ш жесткость пружи- ны 1 / при Ликсированнои начальной температуре; Д1 - удлинение пружины 1/ под действием температуры кдк окрулающеи среды, так и irf мелгпн весов;
ДЬ - начальная длина пружичы; 1 - изменение расстояния кг и1 IMH 1Я и Ч nnvximi 1 i
(точками крепления пружины) под действием температуры.
Поскольку удлиненияД1 иДЬ носят линейный характер, то возможна их компенсация электрическим путем.
В исходном положении подвижная система весов уравновешена усилием упругочеформируемой пружины 17. При этом сигнал U „ с датчика 14 разбаланса близок к нулю и через сумматор 33 поступает на усилитель 12, выходной ток I которого равен нулю, падение напряжения на опорном резисторе 21 будет также равно нулю и на цифровом индикаторе 23 фиксируется нулевое значение массы.
При установке груза 3 на грузо- приемную чашку 2 элемент 1 заклонится до упора 41, перемещение флажка 13 датчика 14 вызывает появление на выходе датчика 14 сигнала Ugb|X, поступающего через сумматор 33 на усилитель 12, преобразующий сигнал UBb1)t в компенсационный ток Tj., устанавливающееся значение которого пропорционально взвешиваемой массе, а напряжение с опорного резистора 21 поступает на вход преобразователя 22 и индицируется на цифровом индикаторе 23, отображая цифровое значение взвешиваемой массы.
При работе весов происходят выделение тепла электроэлементами схемы весов и изменение температуры окружающей среды, что ведет к удлинению компенсационной пружины 17 на величину Д1 и изменению расстояния между ее концами 13 и 19 на величину ДЬ, изме- ение которого отслеживается ,усили- гелем 12, ия выходе которого появляется уравновешивающий ток Al«. При : гом падение напряжения на опорном резисторе Л будет непропорционально нзвепшваемому грузу 3 на величину k F(t°) приращения усилия компенсационной пружины 1/ от температурного воздействия. Показания цифрового индикатора 23 изменяются, появляется дрейф весов, вызванный не изме- мнчием массы груза 3 на чашке 2, а температурным воздействием на компенсационную пр ткины 1/. Поэтому для нокгкчешп погрешности измерения от дронфа усилия пружины одновременно с изменением температуры концов 13 и 1Q пружины I7 изменяются величины - опрогнпленил ермочувстви- телышх ое- псторных элементов 25 и
516
26, что приводит к появлению напряжения разбаланса между точками с и d мостовой схемы 24. Это напряжение AUH поступает на вход формирователя 32, вырабатывающего корректирующее напряжение Д 1 ь, поступающее на один из входов сумматора 33 аналоговых сигналов. На вход усипителя 1 I поступает сигнал UU -UBb(, и усилитель 12 вырабатывает прирацение компенсационного тока Д г.,« UUk , знак которого направлен на компенсацию приращения F(t) усилия компенсационно пружи- ш. I/ от температурного воздействия. При этом подвижная систелп весов занимает новое положение, при котором смещение флажка 13 относительно датчика Г+ разбаланса иа величину iuli, пропорциональное сигналу i AUj, с выхода формирователя 32, выбывает смещение чувствительного элемента 1 на величину, обеспечивающую исключение приращения усилия компенсационной пружины 1/ от температурного воздействия. Подбирая на этапе регулировки весов значение коэффициента преобразования (усиления) Формирователя 32, путем изменения величины регучируемого резистора 37 обратной связи добиваются такого положения чувствительного элемента 1, при котором усилие компенсационной пружины 1/ будет постоянно при всех температурных воздействиях, т.е. изменение усилия компенсационной пружины отслеживается подвижной частью весов, показания которых остаются стабильными и равными действительному значению взвешиваемой массы.
Массивный черный цилиндр 34, закрепленный на стойке . ) и расположенный внутри пружины 17, и внешний тонкостенный, полированный счаружи и изнутри, цилиндр 4), выполняют роль тепловых экранов и дополнительно стабилизируют показания и повышают точность измерения.
Формула изобретения
1. Электромагнитные няфровые весы, содержащие чувствительный элемент с груэоприемнои чашкой, закрепленный на упругой подвеске, установленной на основании, и компенсационную пружину, один конец которой закреплен на основании, а другой - на чувстви
73ь
тельном элементе, электромагнитный компенсатор, один конец катушки которого подкаючен к выходу усилителя, датчик ра эоатанса и аналого-цифровой преобразователь, выход которого подключен к цифровому индикатору, о т - л и ч а ю щ и е с я тем, что, с целью повышения точности, в них введены компенсатор градиента температуры компенсационной пружины, выполненный в виде сплошного черного цилиндра, который расположен внутри этой пружины, тепловой экран, выполненный в виде тонкостенного полированного снаружи и изнутри цилиндра, в котором расположена компенсационная пружина, два термочувствительных резистивных элемента, расположенных в зоне крепления
концов компенсационной пружины: первый - на основании, а второй - на чувствительном элементе, формирователь корректирующего сигнала, сумматор аналоговых сигналов, два резистора, источник питания, опорный резистор и два безмоментных токоподвода, которыми снабжен второй термочувствительны) резистивныи элемент, причем два резистора и два термочувствительных
резистивных элемента соединены в мостовую измерительную схему, к одной диагонали которой подключен источник питания, а к другой - вход Формирователя корректируюгцего сигнала, выход
5 которого подключен к одному входу сумматора аналоговых сигналов, к другому входу которого подключен датчик раз- батанса, а к выходу - вход усилителя, а другой конец катушки электромагнит0 ного компенсатора подключен к опорному резистору и входу аналого-цифрового преобразователя.
.. Весы по п. 1, о т л и ч а ю - щ и е с: я тем, что Формирователь корректирующего сигнала выполнен в виде дифференциального усилителя постоянного тока, дв. ; балластных согласующего и регулируемого резисторов, причем регулируемый резистор включен между выходом и инвертирующем входом дифференциального усилителя постоянного тока, к которому подключен один из балластных резисторов, а другой балластный резистор и согласующий резистор подключены к неинвертирующему входу усилителя постоянного тока.
25 19 А112 5
. . i i/ J .
&/
7 б
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с автоматическим уравновешиванием | 1987 |
|
SU1534327A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Автоматические весы | 1983 |
|
SU1154542A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Весы с автоматическим уравновешиванием | 1985 |
|
SU1262294A1 |
| Суммирующие весы | 1984 |
|
SU1268963A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1979 |
|
SU785652A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромагнитные цифровые весы | 1987 |
|
SU1460618A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
