Область техники, к которой относится изобретение
[0001] Изобретение относится к механизму четырехугловой регулировки датчика массы, включающего в себя механизм Роберваля.
Уровень техники
[0002] Механизм Роберваля широко используется в качестве механизма, который передает нагрузку взвешиваемого объекта основной части датчика в электромагнитных весах, электронных весах с тензодатчиком, емкостных весах, использующих изменение емкости, и т.п.
[0003] Механизм Роберваля имеет структуру, в которой плавающая рамка, которая принимает нагрузку взвешиваемого объекта, и фиксирующая рамка, расположенная напротив плавающей рамки и прикрепленная к корпусу или т.п., соединяются верхней и нижней вспомогательными рамками, имеющими тонкие участки, служащие в качестве петель рядом с обоими крайними участками и расположенные одна над другой параллельно друг другу, и, в принципе, даже когда нецентрированная нагрузка (четырехугловая погрешность) возникает на чаше для взвешивания, поддерживаемой плавающей рамкой, горизонтальная составляющая моментной нагрузки, которая вызывается нецентрированной нагрузкой и прикладывается к части датчика, передается верхней и нижней вспомогательным рамкам и нейтрализуется, и только вертикальная составляющая передается основной части датчика.
[0004] Таким образом, когда параллельность между верхней и нижней вспомогательными рамками теряется, погрешность горизонтальной составляющей непосредственно отражается в измеренном значении, так что, в высокоточном датчике массы, включающем в себя механизм Роберваля, выполняется регулировка параллельности, чтобы выравнивать высоты верхней и нижней вспомогательных рамок.
[0005] Эта регулировка высоты обычно выполняется посредством вырезания точек регулировки (тонких участков). Однако этот способ вырезания является необратимым, и погрешность регулировки, вызванная теплотой трения, является проблемой, так что существуют датчики массы, снабженные механизмом обратимой четырехугловой регулировки с помощью винта.
[0006] Например, датчик массы, описанный в патентном документе 1, имеет механизм четырехугловой регулировки, в котором верхняя вспомогательная рамка прикрепляется на участках консольных рычагов, предусмотренных, чтобы продолжаться от одного крайнего участка фиксирующей рамки по направлению к внутренней стороне датчика, и регулировочные винты вставляются сквозь практически центральные участки участков рычагов и ввинчиваются в фиксирующую рамку. Между участками рычагов и фиксирующей рамкой предусматриваются винтовые пружины, чтобы влиять на восстановление участков рычагов, когда регулировочные винты ослабляются. С этим механизмом четырехугловой регулировки, посредством вращения регулировочных винтов, верхняя вспомогательная рамка поднимается и опускается, и параллельность между верхней и нижней вспомогательными рамками может быть отрегулирована.
Список цитируемых документов
Патентные документы
[0007] Патентный документ 1: публикация нерассмотренной японской патентной заявки № 2007-315774
Сущность изобретения
Проблема, решаемая изобретением
[0008] Возможность обратимой четырехугловой регулировки предоставляется посредством механизма четырехугловой регулировки, использующего регулировочные винты, описанные выше. Однако в последние годы были разработаны более высококачественные датчики массы, и, в частности, более высокая точность в регулировке параллельности между верхней и нижней вспомогательными рамками была предложена для весов с высоким разрешением.
[0009] Здесь, для того, чтобы уменьшать чувствительность четырехугловой регулировки, простая идея заключается в увеличении размера механизма Роберваля или в уменьшении жесткости части четырехугловой регулировки. В ходе размышления пришло понимание необходимости уменьшать толщину участков, которые должны быть подвергнуты четырехугловой регулировке, или необходимости формировать вырезанные участки. Однако, с другой стороны, с точки зрения поддержания эксплуатационной характеристики весов, жесткость датчика массы предпочтительно задается настолько высокой, насколько возможно. К сожалению, уменьшение чувствительности четырехугловой регулировки и сохранение высокой жесткости механизма Роберваля противоречат друг другу, так что трудно удовлетворять оба этих требования.
[0010] Целью настоящего изобретения является предоставление датчика массы, включающего в себя механизм четырехугловой регулировки, который может уменьшать чувствительность четырехугловой регулировки без снижения жесткости механизма Роберваля.
Средство решения проблемы
[0011] Для того, чтобы решать вышеописанную проблему, датчик массы согласно аспекту настоящего изобретения включает в себя: механизм Роберваля, включающий в себя плавающую рамку, которая принимает нагрузку взвешиваемого объекта, фиксирующую рамку, расположенную напротив плавающей рамки, и верхнюю и нижнюю вспомогательные рамки, расположенные одна поверх другой параллельно, каждая имеет тонкие участки около своих обоих концов, и каждая соединяет плавающую рамку и фиксирующую рамку; и механизм четырехугловой регулировки для регулировки параллельности верхней и нижней вспомогательных рамок, при этом механизм четырехугловой регулировки включает в себя: регулировочный винт, который должен вертикально вставляться в крайний участок на стороне фиксирующей рамки, по меньшей мере, одной из верхней и нижней вспомогательных рамок, и который должен ввинчиваться в фиксирующую рамку; и верхний упругий элемент и нижний упругий элемент, которые располагаются последовательно в вертикальном направлении около резьбового участка регулировочного винта, так, чтобы помещать между собой крайний участок на стороне фиксирующей рамки.
[0012] Согласно этому аспекту, регулировочный винт и два упругих элемента используются в качестве механизма четырехугловой регулировки, регулировочный винт вставляется сквозь вспомогательную рамку, которая должна быть подвергнута регулировке параллельности, и на резьбовом участке регулировочного винта два упругих элемента располагаются последовательно, так, чтобы помещать между собой вспомогательную рамку в вертикальном направлении, которое является направлением регулировки высоты. Соответственно, когда регулировочный винт затягивается, интервал смещения, вызванный регулировочным винтом, делится на интервалы смещения верхнего и нижнего упругих элементов, и, в результате, вспомогательная рамка, расположенная между верхним упругим элементом и нижним упругим элементом, смещается только на интервал, полученный вычитанием интервала смещения верхнего упругого элемента. Т.е. интервал смещения, полученный вычитанием интервала смещения верхнего упругого элемента из интервала смещения регулировочного винта, функционирует как величина регулировки высоты механизма Роберваля, и, соответственно, чувствительность четырехугловой регулировки может быть уменьшена без укрупнения структуры механизма четырехугловой регулировки.
[0013] Согласно этому аспекту, два упругих элемента располагаются над и под вспомогательной рамкой, которая должна быть отрегулирована, так что толщина и форма участка, в котором механизм четырехугловой регулировки предусматривается, не изменяются. Соответственно, даже когда механизм четырехугловой регулировки добавляется, жесткость механизма Роберваля сохраняется.
[0014] В вышеописанном аспекте, модуль упругости верхнего упругого элемента предпочтительно меньше модуля упругости нижнего упругого элемента. Соответственно, смещение регулировочного винта механизма четырехугловой регулировки делится в обратной пропорции на отношение модулей упругости верхнего и нижнего упругих элементов, так что, обеспечивая разницу между модулями упругости верхнего и нижнего упругих элементов и устанавливая модуль упругости нижнего упругого элемента больше модуля упругости верхнего упругого элемента, сдвиг интервала смещения верхнего упругого элемента становится большим, вышеописанный аспект функционирует благоприятно, и чувствительность четырехугловой регулировки может быть дополнительно уменьшена.
[0015] В вышеописанном аспекте, предпочтительно, вспомогательная рамка, которая оснащается механизмом четырехугловой регулировки, включает в себя участок соединения, присоединенный к фиксирующей рамке, и участок соединения располагается между тонким участком вспомогательной рамки и механизмом четырехугловой регулировки. Соответственно, точка опоры формируется между точкой приложения силы (механизмом четырехугловой регулировки) и точкой регулировки (тонким участком), так что вертикальная составляющая может быть без возмущений передана механизму Роберваля.
[0016] В вышеописанном аспекте, предпочтительно, оба из верхнего упругого элемента и нижнего упругого элемента являются плоскими пружинами или винтовыми пружинами. Более предпочтительно, верхний упругий элемент является плоской пружиной или винтовой пружиной, а нижний упругий элемент является винтовой пружиной. Соответственно, общая высота конфигурации датчика может быть легко сделана небольшой, и конфигурация датчика может быть уменьшена в размере.
Преимущества изобретения
[0017] С датчиком массы согласно настоящему изобретению чувствительность четырехугловой регулировки может быть уменьшена без уменьшения жесткости механизма Роберваля.
Лучшие варианты осуществления изобретения
[0018] Далее описываются предпочтительные варианты осуществления настоящего изобретения.
[0019] (Первый вариант осуществления)
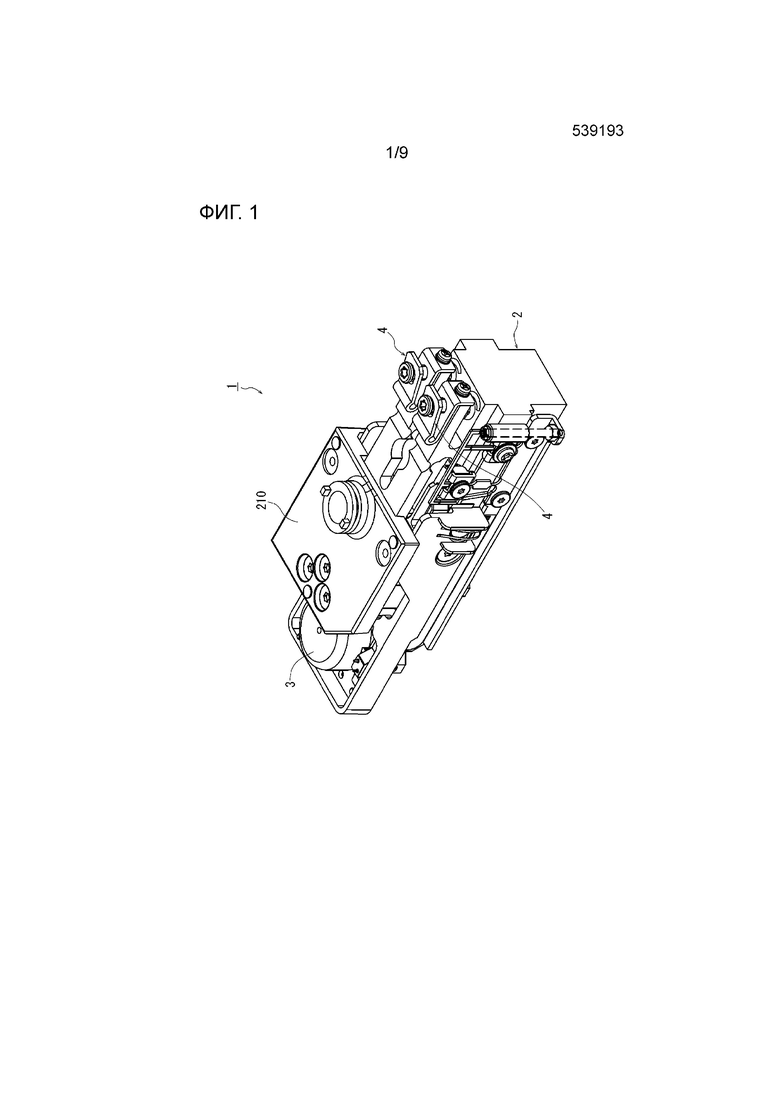
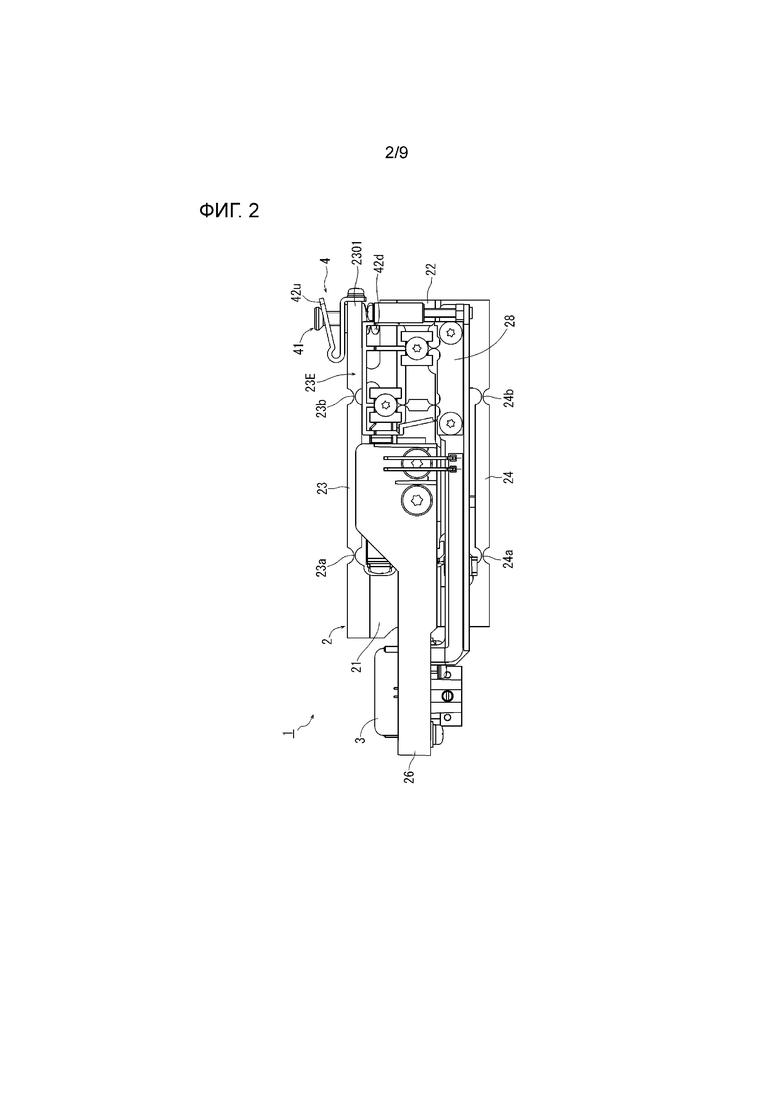
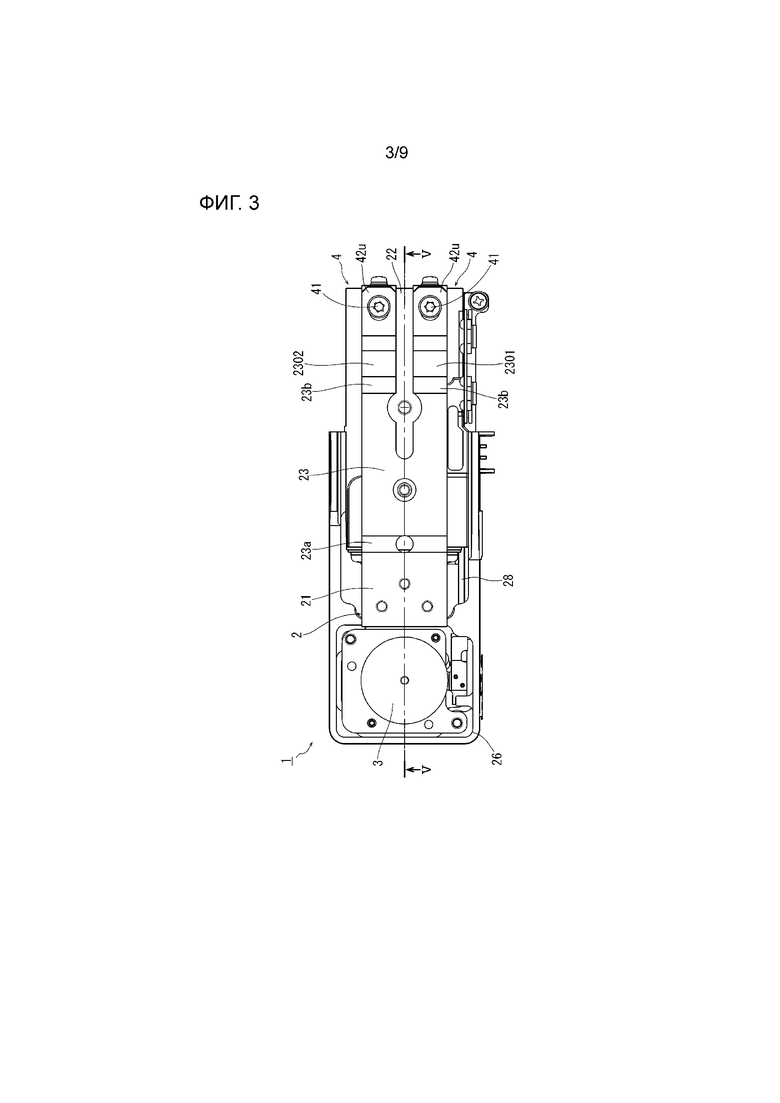
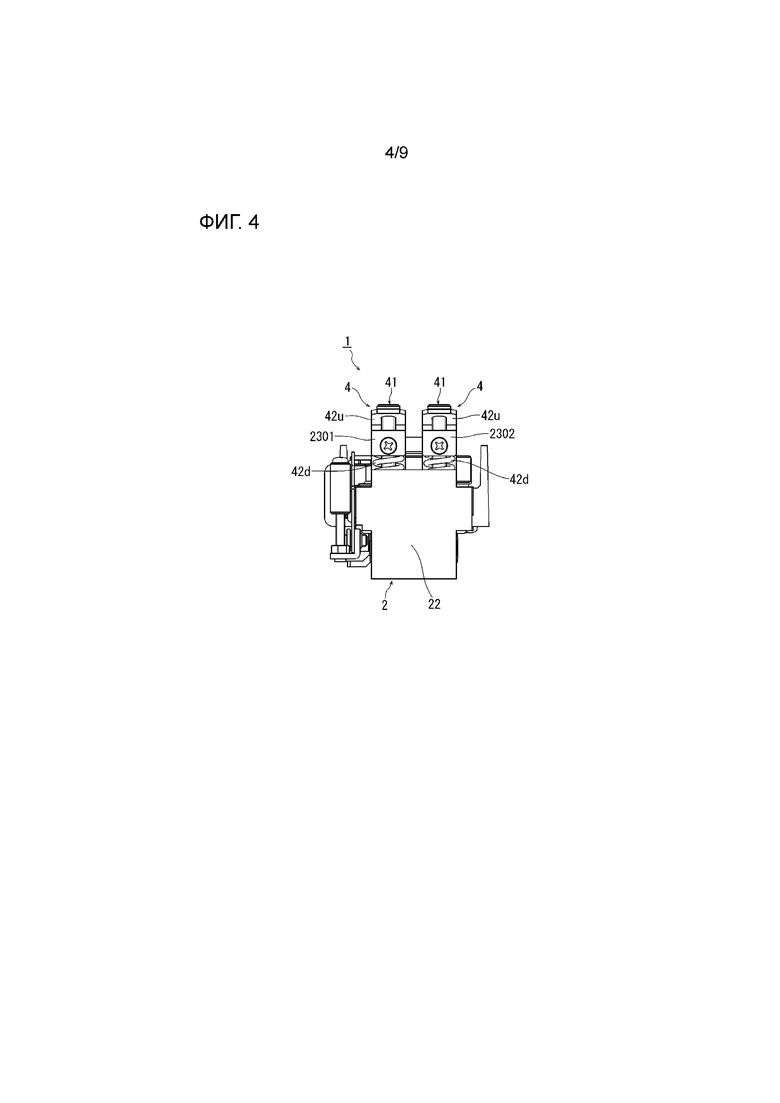
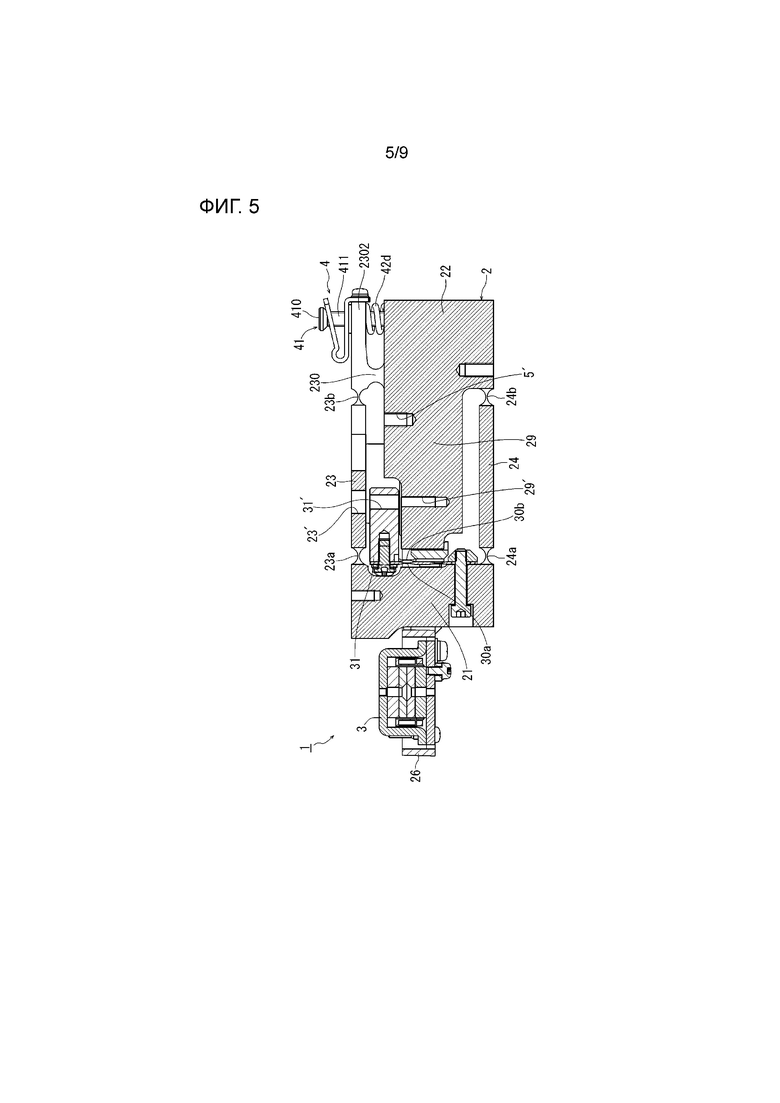
Фиг.1 - перспективный вид сзади датчика массы согласно первому варианту осуществления настоящего изобретения, фиг.2 - вид спереди того же датчика массы, фиг.3 - вид сверху того же датчика массы, фиг.4 - вид с правой стороны того же датчика массы, фиг.5 - вид в продольном разрезе (взятом по линии V-V, показанной на фиг.3) того же датчика массы. На фиг.2-5 описание принимающей чашу весов части 210 опущено.
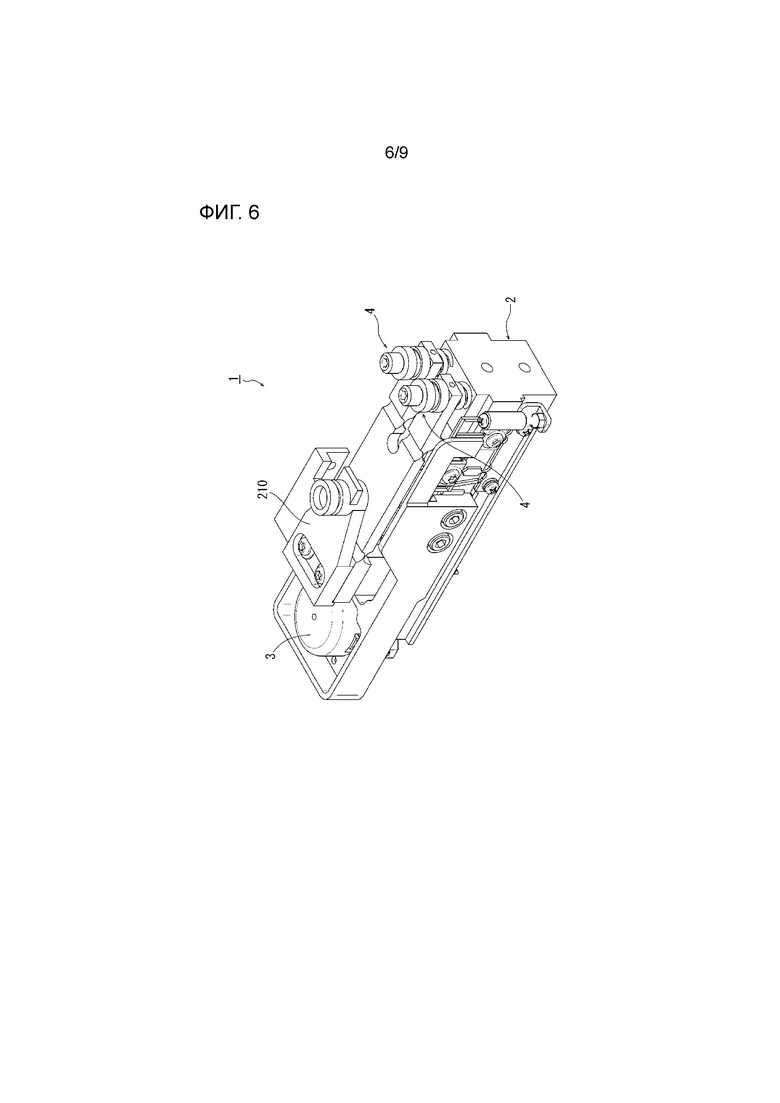
[0020] Датчик 1 массы имеет форму прямоугольного параллелепипеда и включает в себя механизм 2 Роберваля и основную часть 3 датчика. Механизм 2 Роберваля оснащается механизмом 4 четырехугловой регулировки. В качестве основной части 3 датчика электромагнитный датчик используется в качестве примера (см. фиг.1, и т.д.).
[0021] В механизме 2 Роберваля столбчатая плавающая рамка 21, которая принимает нагрузку взвешиваемого объекта, и фиксирующая рамка 22, которая должна быть прикреплена к корпусу весов, располагаются напротив друг друга, и плавающая рамка 21 и фиксирующая рамка 22 соединяются посредством верхней вспомогательной рамки 23 и нижней вспомогательной рамки 24, которые имеют пластинчатую форму и располагаются одна поверх другой параллельно друг другу. Эти плавающая рамка 21, фиксирующая рамка 22, верхняя вспомогательная рамка 23 и нижняя вспомогательная рамка 24 формируются посредством вырезания, с помощью фрезерной машины, цельного металлического блока, отлитого посредством отливки алюминия в формы, прессования алюминия, штамповки алюминия или т.п. (см. фиг.2, и т.д.). На верхнюю поверхность плавающей рамки 1 прикрепляется с помощью винта принимающая чашу весов часть 210, чтобы поддерживать чашу для взвешивания.
[0022] В фиксирующей рамке 22 формируется передающая нагрузку часть 29, выступающая во внутреннее пространство структуры механизма 2 Роберваля. Передающая нагрузку часть 29 соединяется с плавающей рамкой 21 через подвесную ленту 30a, первичное тело 31 коромысла и ленту 30b точки опоры (см. фиг.5 и т.д.). Нагрузка, прикладываемая к плавающей рамке 21, передается основной части 3 датчика через вторичное тело 28 коромысла, привинченное к боковой поверхности передающей нагрузку части 29. Основная часть 3 датчика удерживается механизмом 2 Роберваля через тело 26 рамки (см. фиг.2, и т.д.). В передающей нагрузку части 29 предусматривается принимающее отверстие 5' для прикрепления части, принимающей гаситель колебаний (не показана). В передающей нагрузку части 29, соответственно, предусматриваются первичное тело 31 коромысла и верхняя вспомогательная рамка 23, позиционирующие отверстия 29', 31' и 23' для настройки датчика 1 массы (см. фиг.5, т.д.).
[0023] Рядом с обоими крайними участками верхней и нижней вспомогательных рамок 23 и 24 формируются тонкие участки 23a, 23b, 24a и 24b в поперечном направлении датчика (см. фиг.2 и фиг.3, т.д.).
[0024] Крайний участок 23E на стороне фиксирующей рамки верхней вспомогательной рамки 23 разветвляется из позиции на внутренней стороне датчика участка, где формируется тонкий участок 23b, и продолжается горизонтально на заданном расстоянии от верхней поверхности фиксирующей рамки 22 (см. фиг.3 и фиг.5, т.д.). Далее в данном документе, один (нижний участок на фиг.3) из продолжающихся участков крайнего участка 23E на стороне фиксирующей рамки упоминается как первый продолжающийся участок 2301, а другой участок (верхний участок на фиг.3) упоминается как второй продолжающийся участок 2302. На каждом из первого продолжающегося участка 2301 и второго продолжающегося участка 2302, в позиции на внешней стороне датчика для участка, где формируется тонкий участок 23b, формируется соединительный участок 230, который продолжается вниз и соединяется как неотъемлемая часть с верхней поверхностью фиксирующей рамки 22 (см. фиг.5, и т.д.).
[0025] В первом продолжающемся участке 2301 и втором продолжающемся участке 2302 формируются отверстия для вставки регулировочных винтов 41, описанных ниже. В фиксирующей рамке 22 участки с внутренней резьбой, в которые завинчиваются регулировочные винты 41, формируются в позициях, обращенных к отверстиям для вставки.
[0026] Механизм 4 четырехугловой регулировки предусматривается в первом продолжающемся участке 2301 и втором продолжающемся участке 2302. Далее в данном документе конфигурация механизма четырехугловой регулировки описывается с помощью первого продолжающегося участка 2301. Механизм 4 четырехугловой регулировки также предусматривается во втором продолжающемся участке 2302 таким же образом. В настоящем варианте осуществления механизм 4 четырехугловой регулировки предусматривается в продолжающихся участках 2301 и 2302 крайнего участка 23E на стороне фиксирующей рамки верхней вспомогательной рамки 23, однако механизм 4 четырехугловой регулировки может быть предусмотрен на крайнем участке на стороне фиксирующей рамки нижней вспомогательной рамки 24.
[0027] Механизм 4 четырехугловой регулировки включает в себя регулировочный винт 41, плоскую пружину 42u (верхний упругий элемент), расположенную на верхней стороне, и винтовую пружину 42d (нижний упругий элемент), расположенную на нижней стороне.
[0028] В качестве регулировочного винта 41 может быть использован коммерческий продукт, пока он имеет головку 410 винта и резьбовой участок 411, на котором сформирована внешняя резьба. Регулировочный винт предпочтительно выполняется из того же материала, который формирует механизм 2 Роберваля, поскольку это делает разницу в изменении размера относительно изменения температурных условий небольшой и стабилизирует эксплуатационные качества. Шаг резьбы предпочтительно является небольшим, поскольку это предоставляет возможность настраивать чувствительность четырехугловой регулировки более низкой и делает регулировку более простой.
[0029] Регулировочный винт 41 вставляется через отверстие для вставки первого продолжающегося участка 2301 и ввинчивается в участок с внутренней резьбой, сформированный в фиксирующей рамке 22. В резьбовом участке 411 регулировочного винта 41 винтовая пружина 42d вставляется в позиции между фиксирующей рамкой 22 и первым продолжающимся участком 2301, и плоская пружина 42u вставляется в позиции между первым продолжающимся участком 2301 и головкой 410 винта.
[0030] Винтовая пружина 42d вставляется в вышеописанной позиции в состоянии, сжатом посредством сборочно-монтажного приспособления, когда вставляется регулировочный винт 41.
[0031] Плоская пружина 42u формируется посредством сгибания одной прямоугольной металлической пластины в дугообразную форму (участок дуги равен приблизительно 3/4), так что верхний пластинчатый участок и нижний пластинчатый участок формируют острый угол друг с другом, и верхний пластинчатый участок функционирует в качестве консольной пружины. Крайний участок нижнего пластинчатого участка согнут вниз, чтобы прикрепляться к первому продолжающемуся участку 2301. В предварительно определенных позициях на верхнем пластинчатом участке и нижнем пластинчатом участке плоской пружины 42u формируются отверстия для вставки регулировочного винта 41. Плоская пружина 42u вводится в сжатом состоянии, когда вставляется регулировочный винт 41, нижний пластинчатый участок располагается вдоль первого продолжающегося участка 2301, так что согнутый участок, чтобы служить в качестве точки опоры, располагается на внутренней стороне датчика, а открытый участок, чтобы служить в качестве точки приложения силы, располагается на внешней стороне датчика, и крайний участок нижнего пластинчатого участка прикрепляется винтом к боковой поверхности первого продолжающегося участка 2301. Вышеописанная форма плоской пружины 42u является примером, и плоская пружина может иметь любую форму, пока константа пружины может быть легко спроектирована, и плоская пружина формируется без трудности.
[0032] И плоская пружина 42u, и винтовая пружина 42d размещаются в сжатых состояниях, так что отклоняющее усилие, чтобы нажимать на механизм 4 четырехугловой регулировки в постоянном направлении, всегда прикладывается, так что может быть предотвращено возникновение обратного хода во время вращения регулировочного винта 41.
[0033] Как описано выше, в механизме 4 четырехугловой регулировки, регулировочные винты 41 вставляются сквозь верхнюю вспомогательную рамку 23, которая должна регулироваться для регулировки параллельности, и на резьбовых участках 411 регулировочных винтов 41, плоские пружины 42u располагаются на верхней стороне, а винтовые пружины 42d располагаются на нижней стороне последовательно, так что они помещают посредине первый продолжающийся участок 2301 и второй продолжающийся участок 2302 верхней вспомогательной рамки 23 в вертикальном направлении, т.е. направлении регулировки высоты.
[0034] Четырехугловая регулировка выполняется посредством вращения регулировочного винта 41. В ответ на вертикальное смещение регулировочного винта 41 (смещение винта), вызванное вращением регулировочного винта 41, верхняя вспомогательная рамка 23 располагается через механизм 4 четырехугловой регулировки, и точка регулировки (тонкий участок 23b) регулируется по высоте. Здесь, и винтовая пружина 42d, и плоская пружина 42u механизма 4 четырехугловой регулировки всегда подвергается нагрузке смещения, так что изменение напряжения, вызванное пружинами во время четырехугловой регулировки, может быть игнорировано. Затем, смещение винта для регулировочного винта 41 во время четырехугловой регулировки делится в обратной пропорции к отношению константы пружины для верхней и нижней пружин. Т.е. даже когда регулировочный винт 41 затягивается, верхняя вспомогательная рамка 23, расположенная между плоской пружиной 42u и винтовой пружиной 42d, подвергается воздействию только интервала смещения, полученного вычитанием интервала смещения для плоской пружины 42u из смещения винта для регулировочного винта 41.
[0035] Здесь, константа "Ku" пружины для плоской пружины 42u, расположенной на верхней стороне, проектируется меньше константы "Kd" пружины для винтовой пружины 42d, расположенной на нижней стороне. Смещение регулировочного винта 41 механизма 4 четырехугловой регулировки делится в обратной пропорции к отношению констант пружин для плоской пружины 42u на верхней стороне и винтовой пружины 42d на нижней стороне, так что сдвиг интервала смещения верхней плоской пружины 42u становится больше посредством установки константы "Ku" пружины для пружины на верхней стороне < константы "Kd" пружины для пружины на нижней стороне.
[0036] Таким образом, когда регулировочный винт 41 затягивается, интервал смещения регулировочного винта 41 делится на интервалы смещения плоской пружины 42u на верхней стороне и винтовой пружины 42d на нижней стороне, и интервал смещения, полученный вычитанием интервала смещения плоской пружины 42u на верхней стороне, функционирует в качестве величины регулировки высоты механизма 2 Роберваля. В частности, поскольку константа "Kd" пружины для винтовой пружины 42d на нижней стороне задается большей, чем константа "Ku" пружины для плоской пружины 42u на верхней стороне, большой допуск регулировки может быть обеспечен над вспомогательной рамкой 23, и чувствительность механизма 4 четырехугловой регулировки может быть более отлично уменьшена, чем в случае противоположной настройки (конфигурации, в которой константа "Ku" пружины для плоской пружины 42u на верхней стороне задается большей, чем константа "Kd" пружины для винтовой пружины 42d на нижней стороне.
[0037] Согласно настоящему варианту осуществления, два упругих элемента 42u и 42d располагаются над и под верхней вспомогательной рамкой 23 (первый продолжающийся участок 2301 и второй продолжающийся участок 2302), которая должна быть отрегулирована, и первый продолжающийся участок 2301 (второй продолжающийся участок 2302), снабженный механизмом 4 четырехугловой регулировки, не уменьшается по толщине или вырезается. Т.е. конфигурация механизма 4 четырехугловой регулировки не уменьшает жесткость механизма 2 Роберваля.
[0038] Согласно настоящему варианту осуществления, точка опоры формируется между точкой приложения силы (механизм 4 четырехугловой регулировки) и точкой регулировки (тонкий участок 23b) посредством предоставления соединительного участка 230 между механизмом 4 четырехугловой регулировки и тонким участком 23b. Т.е. соотношение "точки регулировки, точки опоры и точки приложения силы" устанавливается посредством предоставления соединительного участка 230 в этой позиции, и даже когда скручивающая составляющая возникает в верхней вспомогательной рамке 23 посредством вращения регулировочного винта 41 механизма 4 четырехугловой регулировки, составляющие, отличные от вертикальной составляющей, делаются менее передаваемыми вследствие вставки соединительного участка 230 (точки опоры), и только чистая вертикальная составляющая благополучно передается механизму 2 Роберваля, так что ухудшение эксплуатационных качеств датчика 1 массы может быть предотвращено.
[0039] В качестве сравнительного примера, датчик массы, сконфигурированный так, что соединительный участок 230 был сформирован во внешней позиции датчика, а механизм 4 четырехугловой регулировки был расположен между соединительным участком 230 и тонким участком 23b, был изготовлен в качестве опытной продукции, и было подтверждено, что в таком случае, когда "точка регулировки, точка приложения силы и точка опоры" были размещены в таком порядке, четырехугловая погрешность не нейтрализовалась.
[0040] Как описано выше, в настоящем варианте осуществления, следующие результаты могут быть подтверждены в действительности. В результате, чувствительность четырехугловой регулировки может быть уменьшена до 1/2 традиционной чувствительности с помощью механизма 4 четырехугловой регулировки настоящего варианта осуществления. Различие между примером и сравнительным примером оптимизирует чувствительность четырехугловой регулировки в позиции 1/4 на чаше весов с максимальной емкостью, например, 10 (кг) при использовании веса максимальной емкости × 1/2, и предоставляет возможность регулировки вплоть до ± 0,05 г в зависимости от эксплуатационных характеристик весов, тогда как традиционная регулировка вплоть до ± 0,01 г.
[0041] Пример: В вышеописанном механизме 2 Роберваля механизм 4 четырехугловой регулировки был спроектирован так, что один шаг регулировочного винта 41 (смещение винта) = 0,5 (мм), константа "Ku" пружины для плоской пружины 42u = 5 (кгс/мм), а константа "Kd" пружины для винтовой пружины 42d = 10 (кгс/мм). В этом примере, когда регулировочный винт 41 был опущен на один шаг, смещение Роберваля (смещение тонкого участка 23b, служащего в качестве точки регулировки) было 0,05 (мм).
[0042] Сравнительный пример: В традиционном датчике массы (датчике массы, сконфигурированном, как описано в патентном документе 1: константа пружины для винтовой пружины, расположенной на нижней стороне для отклонения = 10 (кгс/мм)), когда тот же регулировочный винт 41 из примера был использован и опущен на один шаг, смещение Роберваля (смещение тонкого участка, служащего в качестве точки регулировки) было 0,1 (мм).
[0043] (Второй вариант осуществления)
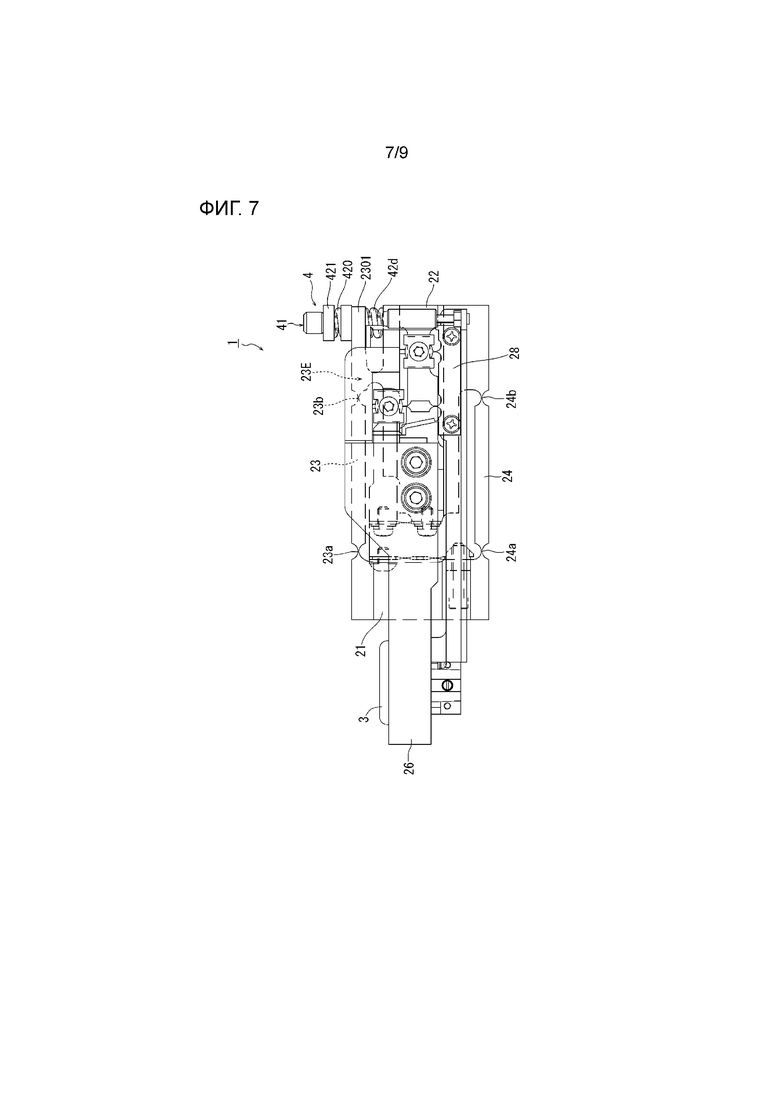
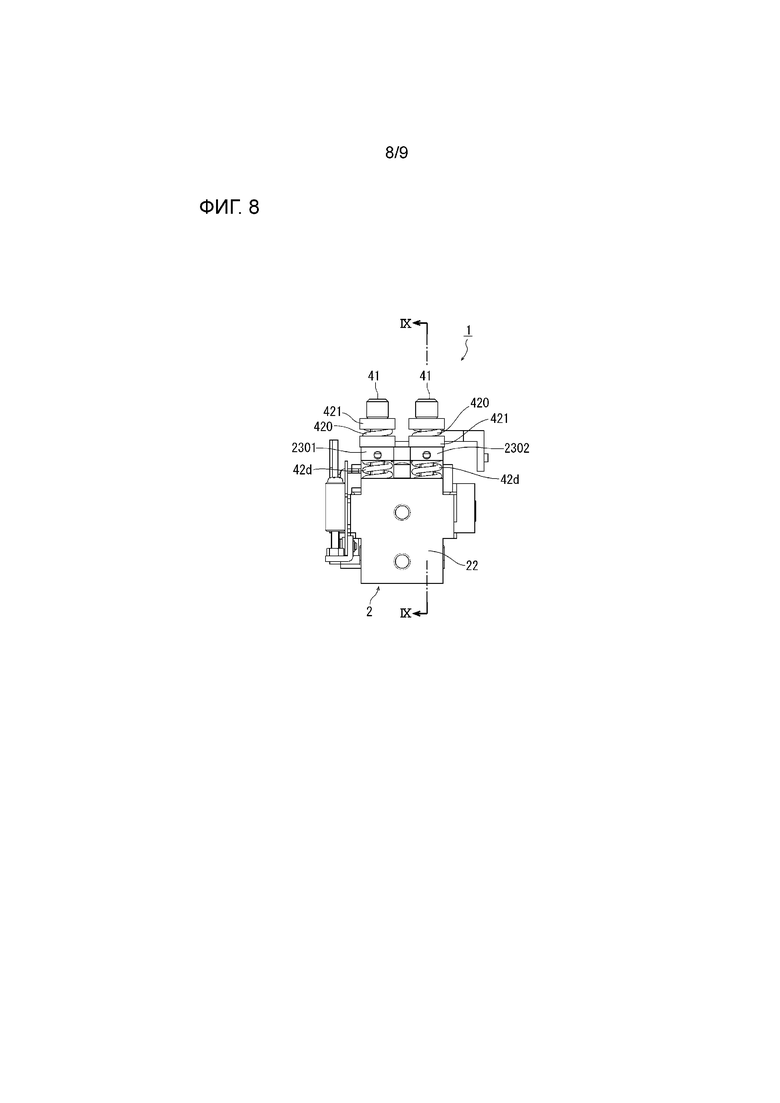
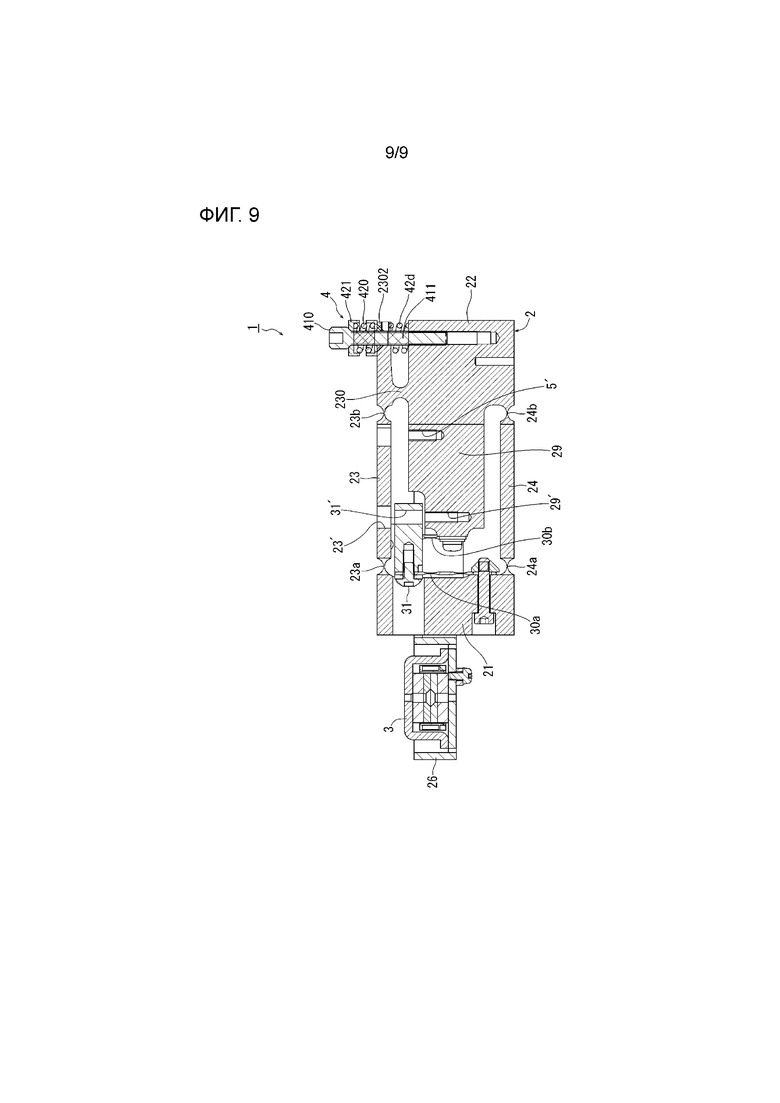
Фиг.6 - это перспективный вид сзади датчика массы согласно второму варианту осуществления настоящего изобретения, фиг.7 - это вид спереди датчика массы согласно второму варианту осуществления настоящего изобретения, фиг.8 - это вид с правой стороны датчика массы согласно второму варианту осуществления настоящего изобретения, и фиг.9 - это вид в продольном разрезе (взятом по линии IX-IX, показанной на фиг.8) датчика массы согласно второму варианту осуществления настоящего изобретения.
[0044] Во втором варианте осуществления винтовая пружина 420u используется в качестве верхнего упругого элемента в первом варианте осуществления. В этом варианте осуществления также константа "K'u" пружины для винтовой пружины 420u, расположенной на верхней стороне, также предпочтительно задается меньшей, чем константа "Kd" пружины для винтовой пружины 42d, расположенной на нижней стороне. Те же компоненты, что и в первом варианте осуществления, обозначаются теми же ссылочными знаками, и их описание опущено.
[0045] Винтовая пружина 420u, расположенная на верхней стороне, размещается в сжатом состоянии посредством сборочно-монтажного приспособления внутри части 421 удержания спирали, прикрепленной к первому продолжающемуся участку 2301 и второму продолжающемуся участку 2302, соответственно. Часть 421 удержания спирали помещает посредине спираль от верхней и нижней сторон и конфигурируется так, чтобы не передавать непосредственно крутящий момент винта к спирали, а устойчиво передавать только вертикальное смещение к спирали. Тот же результат, что и в первом варианте осуществления, также получается посредством второго варианта осуществления.
[0046] Таким образом, противоречивая цель уменьшить чувствительность четырехугловой регулировки без уменьшения жесткости механизма 2 Роберваля может быть достигнута посредством любого из двух механизмов 4 четырехугловой регулировки, описанных выше. Каждый из механизмов 4 четырехугловой регулировки, описанных выше, включает в себя два упругих элемента, расположенных над и под вспомогательной рамкой, которая должна регулироваться, и нет необходимости в вырезающей регулировке, которая традиционно обычно выполняется. Этот результат предпочтителен с точки зрения эффективности датчика 1 массы. Т.е. с помощью любого из двух механизмов 4 четырехугловой регулировки датчик 1 массы получает улучшение в эксплуатационных характеристиках и эффективности в качестве взвешивающего устройства.
[0047] Кроме того, проектирование различия в константе пружины между верхним пружинным элементом и нижним пружинным элементом является легким посредством использования пружинных элементов в качестве верхнего упругого элемента и нижнего упругого элемента. Другие аспекты, использующие, в качестве верхнего упругого элемента и/или нижнего упругого элемента, соль/гель, изолированный в деформируемый герметичный контейнер, или упругий материал, такой как резиновый полимерный материал, также возможны, и упругое тело, предпочтительно, упругое тело с обратимыми свойствами включено в аспект настоящего изобретения.
Краткое описание чертежей
[0048]
Фиг.1 - перспективный вид сзади датчика массы согласно первому варианту осуществления настоящего изобретения.
Фиг.2 - вид спереди датчика массы согласно первому варианту осуществления настоящего изобретения.
Фиг.3 - вид сверху датчика массы согласно первому варианту осуществления настоящего изобретения.
Фиг.4 - вид с правой стороны датчика массы согласно первому варианту осуществления настоящего изобретения.
Фиг.5 - вид в продольном разрезе датчика массы согласно первому варианту осуществления настоящего изобретения.
Фиг.6 - перспективный вид сзади датчика массы согласно второму варианту осуществления настоящего изобретения.
Фиг.7 - вид спереди датчика массы согласно второму варианту осуществления настоящего изобретения.
Фиг.8 - вид с правой стороны датчика массы согласно второму варианту осуществления настоящего изобретения.
Фиг.9 - вид в продольном разрезе датчика массы согласно второму варианту осуществления настоящего изобретения.
Список ссылочных позиций
[0049]
1 Датчик массы
2 Механизм Роберваля
4 Механизм четырехугловой регулировки
21 Плавающая рамка
22 Фиксирующая рамка
23 Верхняя вспомогательная рамка
23a, 23b Тонкий участок
23E Крайний участок на стороне фиксирующей рамки
230 Соединительный участок
2301 Первый продолжающийся участок
2302 Второй продолжающийся участок
24 Нижняя вспомогательная рамка
24a, 24b Тонкий участок
41 Регулировочный винт
411 Резьбовой участок
42u, 420 Верхний упругий элемент (плоская пружина, винтовая пружина)
42d Нижний упругий элемент (винтовая пружина)
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ИЗМЕРЕНИЯ НАГРУЗКИ ДЛЯ ЭЛЕКТРОННЫХ ВЕСОВ И СПОСОБ СБОРКИ ДАННОГО МЕХАНИЗМА | 2007 |
|
RU2444710C2 |
| УСТРОЙСТВО ПРИВОДА ЛИНЗЫ, ЛИНЗОВЫЙ МОДУЛЬ И УСТРОЙСТВО ДАТЧИКА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2503044C2 |
| ПРОЕКЦИОННОЕ УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2633449C2 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| ОДНОРАЗОВЫЙ ПОДГУЗНИК | 2012 |
|
RU2623914C2 |
| Монолыжа | 1989 |
|
SU1780514A3 |
| Станок для изготовления электрических катушек | 1985 |
|
SU1348921A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| РАЗДЕЛИТЕЛЬНАЯ УСТАНОВКА С АРХИМЕДОВЫМ ВИНТОМ ДЛЯ ОБРАБОТКИ НАВОЗНОЙ ЖИЖИ | 2011 |
|
RU2601521C2 |
| УПРОЩЕННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ШАГА ЛОПАСТИ ВОЗДУШНОГО ВИНТА В АВИАЦИОННОМ ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2490167C2 |
Изобретение относится к средствам для измерения массы объектов на базе механизма Роберваля. Предложенный датчик массы включает в себя механизм четырехугловой регулировки, способный уменьшать чувствительность четырехугловой регулировки без уменьшения жесткости механизма Роберваля. Датчик (1) массы включает в себя механизм (2) Роберваля, в котором плавающая рамка (21) и фиксирующая рамка (22) соединяются посредством верхней и нижней вспомогательных рамок (23, 24), имеющих тонкие участки (23b), сформированные на них, и механизм (4) четырехугловой регулировки, чтобы выполнять регулировку параллельности. Механизм (4) четырехугловой регулировки включает в себя регулировочный винт (41), а также верхний упругий элемент (42u) и нижний упругий элемент (42d), расположенные последовательно в вертикальном направлении так, чтобы помещать между ними вспомогательную рамку (23), которая должна быть подвергнута регулировке параллельности. Предложенное устройство позволяет уменьшить чувствительность четырехугловой регулировки без снижения жесткости механизма Роберваля. 2 з.п. ф-лы, 9 ил.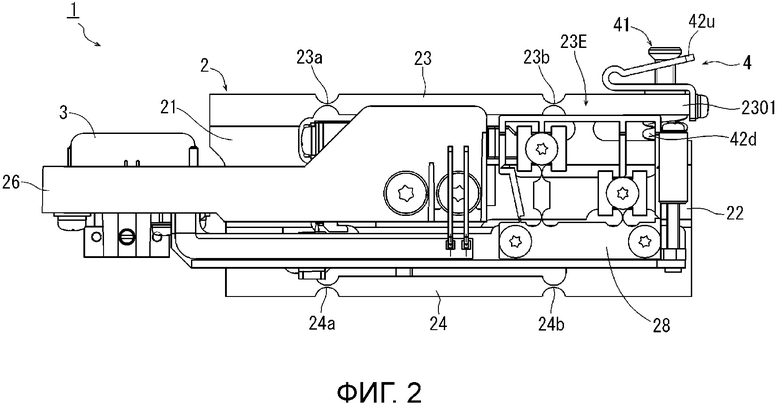
1. Датчик массы, содержащий:
механизм Роберваля, включающий в себя плавающую рамку, которая принимает нагрузку взвешиваемого объекта, фиксирующую рамку, расположенную напротив плавающей рамки, и верхнюю и нижнюю вспомогательные рамки, расположенные одна поверх другой параллельно в вертикальном направлении, каждая из которых имеет тонкие участки около обоих своих концов и каждая из которых соединяет плавающую рамку и фиксирующую рамку; и
механизм четырехугловой регулировки для регулировки параллельности верхней и нижней вспомогательных рамок, при этом
механизм четырехугловой регулировки дополнительно содержит: регулировочный винт, который должен быть вертикально вставлен в крайний участок на стороне фиксирующей рамки по меньшей мере одной из верхней и нижней вспомогательных рамок и который должен ввинчиваться в фиксирующую рамку; и
плоскую пружину в качестве верхнего упругого элемента и винтовую пружину в качестве нижнего упругого элемента, которые располагаются последовательно в вертикальном направлении около резьбового участка регулировочного винта так, чтобы помещать посредине крайний участок на стороне фиксирующей рамки,
при этом плоская пружина формируется посредством сгибания одной прямоугольной металлической пластины так, что верхний пластинчатый участок и нижний пластинчатый участок формируют острый угол друг с другом, причем верхний пластинчатый участок функционирует в качестве консольной пружины, крайний участок нижнего пластинчатого участка сгибается вниз, и плоская пружина вставляется в сжатом состоянии так, что согнутый участок, чтобы служить в качестве точки опоры, позиционируется на внутренней стороне датчика, а открытый участок, чтобы служить в качестве точки усилия, позиционируется на внешней стороне датчика, причем нижний пластинчатый участок располагается вдоль крайнего участка на стороне фиксирующей рамки, и крайний участок нижнего пластинчатого участка прикрепляется винтом к боковой поверхности крайнего участка на стороне фиксирующей рамки.
2. Датчик массы по п.1, в котором
модуль упругости верхнего упругого элемента меньше модуля упругости нижнего упругого элемента.
3. Датчик массы по п.1, в котором вспомогательная рамка, которая оснащена механизмом четырехугловой регулировки, дополнительно содержит соединительный участок, присоединенный к фиксирующей рамке, и соединительный участок располагается между тонким участком вспомогательной рамки и механизмом четырехугловой регулировки.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 7939770 B2, 10.05.2011 | |||
| US 6693245 B2, 17.02.2004 | |||
| JP 2008003031 A, 10.01.2008 | |||
| ОПОРНАЯ СТРУКТУРА ДЛЯ ДАТЧИКА МАССЫ, ИСПОЛЬЗУЕМОГО В ВЕСАХ | 2007 |
|
RU2431810C2 |

