Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к обвязочной машине, выполненной с возможностью обвязывать обвязываемый объект, такой как арматурный стержень и т.п. с помощью проволоки.
Уровень техники
[0002] В предшествующем уровне техники, предлагается обвязочная машина, называемая "машиной для обвязки арматурных стержней", выполненная с возможностью наматывать проволоку, подаваемую из устройства подачи проволоки, в форме петли вокруг арматурных стержней и захватывать и скручивать проволоку посредством скручивающего крючка, за счет этого натягивая и обвязывая арматурные стержни с помощью проволоки (например, см. PTL 1).
[0003] В машине для обвязки арматурных стержней, раскрытой в PTL 1, загибочная направляющая, выполненная с возможностью загибать проволоку, подаваемую из проволочной бобины и подавать проволоку вниз, и нижняя загибочная направляющая, выполненная с возможностью снова направлять проволоку, подаваемую посредством загибочной направляющей, так что она возвращается в предварительно определенную позицию верхней загибочной направляющей, размещаются с выступанием вперед из корпуса обвязочной машины. Нижняя загибочная направляющая предусмотрена с возможностью вращения в корпусе обвязочной машины через опорный вал, и концевая сторона верхушки нижней загибочной направляющей поджимается вверх.
Список библиографических ссылок
Патентные документы
[0004] PTL 1
Патент Японии № 5182212
Сущность изобретения
Техническая задача
[0005] В машине для обвязки арматурных стержней, раскрытой в PTL 1, нижняя загибочная направляющая поджимается таким образом, что концевая сторона верхушки вращается вверх, и интервал между загибочной направляющей и нижней загибочной направляющей задается. Загибочная направляющая и нижняя загибочная направляющая могут не наблюдаться в зависимости от направления машины для обвязки арматурных стержней. В этом случае, когда интервал между загибочной направляющей и нижней загибочной направляющей задается, затруднительно вставлять арматурные стержни между загибочной направляющей и нижней загибочной направляющей.
[0006] Настоящее раскрытие сущности осуществлено с учетом вышеприведенных ситуаций, и его цель заключается в том, чтобы предоставлять обвязочную машину, сконфигурированную таким образом, что арматурные стержни могут легко вставляться между парой направляющих.
Решение задачи
[0007] Чтобы достигать вышеуказанной цели, обвязочная машина по настоящему раскрытию сущности включает в себя образующую корпус часть; блок подачи, выполненный с возможностью подавать проволоку; первую направляющую и вторую направляющую, проходящие в первом направлении из концевого участка на одной стороне образующей корпус части, размещаемые с интервалом, в котором вставляется обвязываемый объект, во втором направлении, ортогональном к первому направлению, и выполненные с возможностью направлять проволоку, подаваемую посредством блока подачи; скручивающий блок, выполненный с возможностью скручивать проволоку, направляемую посредством первой направляющей и второй направляющей; и подвижную направляющую часть, выполненную с возможностью изменять интервал между первой направляющей и второй направляющей во втором направлении с первого расстояния на второе расстояние, меньшее первого расстояния.
[0008] В обвязочной машине, обвязываемый объект вставляется между первой направляющей и второй направляющей в состоянии, в котором интервал между первой направляющей и второй направляющей во втором направлении задается равным первому расстоянию, большему второго расстояния. Интервал между первой направляющей и второй направляющей во втором направлении затем изменяется с первого расстояния на второе расстояние, меньшее первого расстояния.
Преимущества изобретения
[0009] Согласно обвязочной машине настоящего раскрытия сущности, обвязываемый объект может вставляться между первой направляющей и второй направляющей в состоянии, в котором интервал между первой направляющей и второй направляющей во втором направлении задается равным первому расстоянию, большему второго расстояния. В силу этого, обвязываемый объект может легко вставляться между парой направляющих.
Краткое описание чертежей
[0010] Фиг.1 является видом сбоку, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по первому варианту осуществления.
Фиг.2 является видом сбоку, иллюстрирующим пример внутренней конфигурации машины для обвязки арматурных стержней по первому варианту осуществления.
Фиг.3 является видом сбоку, иллюстрирующим основные части внутренней конфигурации машины для обвязки арматурных стержней по первому варианту осуществления.
Фиг.4A является видом сбоку, иллюстрирующим пример направляющей части.
Фиг.4B является видом сбоку, иллюстрирующим пример направляющей части.
Фиг.5 является видом в перспективе, иллюстрирующим пример направляющей части и контактного элемента.
Фиг.6A является видом сбоку, иллюстрирующим пример контактного элемента.
Фиг.6B является видом сбоку, иллюстрирующим пример контактного элемента.
Фиг.7 является видом сбоку, иллюстрирующим пример блока вывода, выполненного с возможностью обнаруживать вторую направляющую.
Фиг.8 является функциональной блок-схемой машины для обвязки арматурных стержней по первому варианту осуществления.
Фиг.9A является видом сбоку, иллюстрирующим модифицированный вариант осуществления подвижной направляющей части.
Фиг.9B является видом сбоку, иллюстрирующим модифицированный вариант осуществления подвижной направляющей части.
Фиг.10A является видом сбоку, иллюстрирующим модифицированный вариант осуществления направляющей части.
Фиг.10B является видом сбоку, иллюстрирующим модифицированный вариант осуществления направляющей части.
Фиг.11A является видом сбоку, иллюстрирующим другой модифицированный вариант осуществления направляющей части.
Фиг.11B является видом сбоку, иллюстрирующим другой модифицированный вариант осуществления направляющей части.
Фиг.12A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать вторую направляющую.
Фиг.12B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать вторую направляющую.
Фиг.13A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.13B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.14A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.14B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.15A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.15B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.16 является видом сбоку, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.17 является видом сверху, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.18 является видом в перспективе, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.19 является видом в перспективе, иллюстрирующим пример части в виде рукоятки.
Фиг.20 является видом сбоку, иллюстрирующим пример внутренней конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.21 является видом сбоку, иллюстрирующим основные части внутренней конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.22A является видом сбоку, иллюстрирующим пример направляющей части.
Фиг.22B является видом сбоку, иллюстрирующим пример направляющей части.
Фиг.23 является видом в перспективе, иллюстрирующим пример направляющей части и контактного элемента.
Фиг.24A является видом сбоку, иллюстрирующим пример контактного элемента.
Фиг.24B является видом сбоку, иллюстрирующим пример контактного элемента.
Фиг.25 является функциональной блок-схемой машины для обвязки арматурных стержней по второму варианту осуществления.
Фиг.26A является видом сбоку, иллюстрирующим модифицированный вариант осуществления подвижной направляющей части.
Фиг.26B является видом сбоку, иллюстрирующим модифицированный вариант осуществления подвижной направляющей части.
Фиг.27A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.27B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.28A является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.28B является видом сбоку, иллюстрирующим модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент.
Фиг.29 является функциональной блок-схемой машины для обвязки арматурных стержней по третьему варианту осуществления.
Фиг.30A является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Фиг.30B является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Фиг.31A является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Фиг.31B является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Фиг.32A является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Фиг.32B является видом сбоку, иллюстрирующим основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
Подробное описание вариантов осуществления
[0011] Ниже описываются примеры машины для обвязки арматурных стержней в качестве вариантов осуществления обвязочной машины по настоящему изобретению со ссылкой на чертежи.
[0012] Пример машины для обвязки арматурных стержней по первому варианту осуществления
Фиг.1 является видом сбоку, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по первому варианту осуществления, фиг.2 является видом сбоку, иллюстрирующим пример внутренней конфигурации машины для обвязки арматурных стержней по первому варианту осуществления, и фиг.3 является видом сбоку, иллюстрирующим основные части внутренней конфигурации машины для обвязки арматурных стержней по первому варианту осуществления.
[0013] Машина 1A для обвязки арматурных стержней по первому варианту осуществления включает в себя размещающую часть 2, выполненную с возможностью размещать с возможностью вращения проволочную бобину 20, на которую наматывается проволока W, и блок 3 подачи, выполненный с возможностью подавать проволоку W, намотанную на проволочную бобину 20, размещенную в размещающей части 2. Машина 1A для обвязки арматурных стержней также включает в себя регулирующую часть 4, выполненную с возможностью загибать проволоку W, подаваемую посредством блока 3 подачи, и направляющую часть 5, выполненную с возможностью направлять проволоку W, загибаемую посредством регулирующей части 4. Машина 1A для обвязки арматурных стержней также включает в себя режущий блок 6, выполненный с возможностью отрезать проволоку W, скручивающий блок 7, выполненный с возможностью скручивать проволоку W, и блок 8 привода, выполненный с возможностью приводить в действие режущий блок 6, скручивающий блок 7 и т.п.
[0014] В машине 1A для обвязки арматурных стержней, направляющая часть 5 предусмотрена на одной стороне образующей корпус части 10. В настоящем варианте осуществления, сторона, на которой предусмотрена направляющая часть 5, задается как передняя сторона. В машине 1A для обвязки арматурных стержней, часть 10h в виде рукоятки предусмотрена выступающей из образующей корпус части 10, и курок 10t для приема операции приведения в действие машины 1A для обвязки арматурных стержней предусмотрен на передней стороне части 10h в виде рукоятки.
[0015] Размещающая часть 2 имеет такую конфигурацию, в которой проволочная бобина 20 может присоединяться/отсоединяться и поддерживаться. Блок 3 подачи имеет пару подающих шестерней 30 в качестве подающего элемента. Когда электромотор (не показан) вращает подающие шестерни 30 в состоянии, в котором проволока W размещается посередине между парой подающих шестерней 30, блок 3 подачи подает проволоку W. Блок 3 подачи может подавать проволоку W в прямом направлении, обозначаемом с помощью стрелки F, и в обратном направлении, обозначаемом с помощью стрелки R, согласно направлению вращения подающих шестерней 30.
[0016] Режущий блок 6 предусмотрен ниже блока 3 подачи относительно подачи проволоки W в прямом направлении, обозначаемом с помощью стрелки F. Режущий блок 6 имеет часть 60 с неподвижным лезвием и часть 61 с подвижным лезвием, выполненную с возможностью отрезать проволоку W, совместно с частью 60 с неподвижным лезвием. Режущий блок 6 также имеет трансмиссионный механизм 62, выполненный с возможностью передавать движение блока 8 привода в часть 61 с подвижным лезвием.
[0017] Часть 60 с неподвижным лезвием имеет отверстие 60a, через которое проходит проволока W. Часть 61 с подвижным лезвием выполнена с возможностью отрезать проволоку W, проходящую через отверстие 60a части 60 с неподвижным лезвием, посредством операции вращения вокруг части 60 с неподвижным лезвием в качестве опорной точки.
[0018] Регулирующая часть 4 имеет первый-третий регулирующие элементы в контакте с проволокой W во множестве частей, в настоящем примере, по меньшей мере, в трех местах в направлении подачи проволоки W, подаваемой посредством блока 3 подачи, за счет этого загибая проволоку W вдоль тракта Wf подачи проволоки W, показанного с помощью пунктирной линии на фиг.3.
[0019] Первый регулирующий элемент регулирующей части 4 сконструирован посредством части 60 с неподвижным лезвием. Регулирующая часть 4 также имеет регулирующий элемент 42 в качестве второго регулирующего элемента, предоставленного ниже части 60 с неподвижным лезвием относительно подачи проволоки W в прямом направлении, обозначаемом с помощью стрелки F, и регулирующий элемент 43 в качестве третьего регулирующего элемента, предоставленного ниже регулирующего элемента 42. Регулирующий элемент 42 и регулирующий элемент 43 сконструированы посредством цилиндрического элемента, и проволока W находится в контакте с их внешними периферийными поверхностями.
[0020] В регулирующей части 4, часть 60 с неподвижным лезвием, регулирующий элемент 42 и регулирующий элемент 43 размещаются на кривой в соответствии со спиральным трактом Wf подачи проволоки W. Отверстие 60a части 60 с неподвижным лезвием, через которую проходит проволока W, предусмотрено на тракте Wf подачи проволоки W. Регулирующий элемент 42 предусмотрен на диаметрально внутренней стороне относительно тракта Wf подачи проволоки W. Регулирующий элемент 43 предусмотрен на диаметрально внешней стороне относительно тракта Wf подачи проволоки W.
[0021] В силу этого, проволока W, подаваемая посредством блока 3 подачи, проходит в контакте с частью 60 с неподвижным лезвием, регулирующим элементом 42 и регулирующим элементом 43 таким образом, что проволока W загибается, так что она идет по тракту Wf подачи проволоки W.
[0022] Регулирующая часть 4 имеет трансмиссионный механизм 44, выполненный с возможностью передавать движение блока 8 привода в регулирующий элемент 42. В операциях подачи проволоки W в прямом направлении посредством блока 3 подачи и загибания проволоки W, регулирующий элемент 42 выполнен с возможностью перемещаться в позицию, в которой он контактирует с помощью проволоки W, и в операциях подачи проволоки W в обратном направлении и наматывания проволоки W на арматурные стержни S, регулирующий элемент 42 выполнен с возможностью перемещаться в позицию, в которой он не контактирует с помощью проволоки W.
[0023] Фиг.4A и 4B являются видами сбоку, иллюстрирующими пример направляющей части, фиг.5 является видом в перспективе, иллюстрирующим пример направляющей части и контактного элемента, и фиг.6A и 6B являются видами сбоку, иллюстрирующими пример контактного элемента. Ниже описываются конфигурация приведения в действие пары направляющих и функциональные преимущества.
[0024] Направляющая часть 5 имеет первую направляющую 51, содержащую регулирующий элемент 43 регулирующей части 4 и выполненную с возможностью направлять проволоку W, и вторую направляющую 52, выполненную с возможностью направлять проволоку W, загибаемую посредством регулирующей части 4 и первой направляющей 51, в скручивающий блок 7.
[0025] Первая направляющая 51 присоединяется к концевому участку на передней стороне образующей корпус части 10 и проходит в первом направлении, обозначаемом с помощью стрелки A1. Как показано на фиг.3, первая направляющая 51 имеет участок 51h паза, имеющий направляющую поверхность 51g, с которой находится в скользящем контакте проволока W, подаваемая посредством блока 3 подачи. Что касается первой направляющей 51, когда сторона, присоединенная к образующей корпус части 10, называется "базовой концевой стороной", и сторона, протягивающаяся в первом направлении из образующей корпус части 10, называется "концевой стороной верхушки", регулирующий элемент 42 предусмотрен в базовой концевой стороне первой направляющей 51, и регулирующий элемент 43 предусмотрен в концевой стороне верхушки первой направляющей 51. Базовая концевая сторона первой направляющей 51 прикрепляется к металлической части для образующей корпус части 10 посредством винта и т.п. При использовании в данном документе, закрепление не означает закрепление в строгом смысле, но включает в себя незначительное перемещение, такое как движение со звуком первой направляющей 51 относительно образующей корпус части 10. Зазор, через который может проходить проволока W, формируется между направляющей поверхностью 51g первой направляющей 51 и внешней периферийной поверхностью регулирующего элемента 42. Часть внешней периферийной поверхности регулирующего элемента 43 выступает к направляющей поверхности 51g первой направляющей 51.
[0026] Вторая направляющая 52 присоединяется к концевому участку на передней стороне образующей корпус части 10. Вторая направляющая 52 предусмотрена обращенной к первой направляющей 51 во втором направлении, ортогональном к первому направлению и обозначаемом с помощью стрелки A2 вдоль направления протягивания части 10h в виде рукоятки. Первая направляющая 51 и вторая направляющая 52 разнесены на предварительно определенный интервал во втором направлении, и отверстие 53 для вставки/вытаскивания, в/из которого вставляются/вытаскиваются арматурные стержни S, формируется между первой направляющей 51 и второй направляющей 52, как показано на фиг.4A и 4B.
[0027] Как показано на фиг.5, вторая направляющая 52 имеет пару боковых направляющих 52a, обращенных в третьем направлении, обозначаемом с помощью стрелки A3, ортогональном |к первому направлению и второму направлению. Что касается второй направляющей 52, когда сторона, присоединенная к образующей корпус части 10, называется "базовой концевой стороной", и сторона, протягивающаяся в первом направлении из образующей корпус части 10, называется "концевой стороной верхушки", зазор между парой боковых направляющих 52a постепенно снижается от концевой стороны верхушки к базовой концевой стороне. В паре боковых направляющих 52a, базовые концевые стороны обращены друг к другу с зазором, через который может проходить проволока W.
[0028] Вторая направляющая 52 присоединяется к образующей корпус части 10 с поддержкой на базовой концевой стороне посредством вала 52b. Осевая линия вала 52b обращена к третьему направлению. Вторая направляющая 52 может вращаться вокруг вала 52b в качестве опорной точки относительно образующей корпус части 10. Вторая направляющая 52 может перемещаться в направлениях, в которых концевой участок 52c на концевой стороне верхушки приближается вплотную и отходит от концевого участка 51c первой направляющей 51, обращенной ко второй направляющей 52 во втором направлении, обозначаемом с помощью стрелки A2. Концевой участок P2 участка 51h паза является открытым для доступа для концевого участка 51c первой направляющей 51.
[0029] Вторая направляющая 52 выполнена с возможностью вращаться вокруг вала 52b в качестве опорной точки, за счет этого перемещаясь между первой позицией (см. сплошную линию на фиг.4A), в которой расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 представляет собой первое расстояние L1, и второй позицией (см. штрихпунктирную линию с двумя точками на фиг.4A и сплошную линию на фиг.4B), в которой расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 представляет собой второе расстояние L2, меньшее первого расстояния L1.
[0030] В состоянии, в котором вторая направляющая 52 расположена во второй позиции, концевой участок 52c второй направляющей 52 и концевой участок 51c первой направляющей 51 открываются между ними. В состоянии, в котором вторая направляющая 52 расположена в первой позиции, интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 больше, так что арматурные стержни S могут проще вставляться в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52.
[0031] В состоянии, в котором вторая направляющая 52 расположена во второй позиции, боковые направляющие 52a позиционируются на тракте Wf подачи проволоки W, показанном с помощью пунктирной линии на фиг.4A и 4B. В состоянии, в котором вторая направляющая 52 расположена в первой позиции, при условии, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51B больше, чем в случае, в котором вторая направляющая 52 расположена во второй позиции, боковые направляющие 52a могут позиционироваться на тракте Wf подачи проволоки W, или боковые направляющие 52a могут позиционироваться на более внешней стороне, чем тракт Wf подачи проволоки W, как показано с помощью сплошной линии на фиг.4A.
[0032] Вторая направляющая 52 поджимается в направлении перемещения к первой позиции посредством поджимающего элемента 54, такого как крутильная спиральная пружина и удерживается в первой позиции.
[0033] Машина 1A для обвязки арматурных стержней включает в себя контактный элемент 9A, выполненный с возможностью обнаруживать арматурные стержни S по мере того, как арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52, входят в контакт с ним, и приводить в действие вторую направляющую 52. Машина 1A для обвязки арматурных стержней также включает в себя образующую крышку часть 11, выполненную с возможностью закрывать концевой участок на передней стороне образующей корпус части 10.
[0034] Образующая крышку часть 11 присоединяется от концевого участка на передней стороне образующей корпус части 10 поверх левой и правой сторон образующей корпус части 10 в третьем направлении. Образующая крышку часть 11 сконструирована посредством металлической пластины и т.п. и имеет такую форму, что она закрывает участок или все из концевого участка на передней стороне образующей корпус части 10 и участков левой и правой сторон на передней стороне образующей корпус части 10 между базовой концевой стороной первой направляющей 51 и базовой концевой стороной второй направляющей 52. Тогда как часть 10 корпуса изготовлена из смолы, образующая крышку часть 11 изготовлена из металла, так что даже когда контактный элемент 9A и арматурные стержни S входят в контакт с образующей крышку частью 11, изготовленной из металла, износ может уменьшаться.
[0035] Контактный элемент 9A представляет собой пример подвижной направляющей части, поддерживается с возможностью вращения посредством вала 90A и присоединяется к образующей корпус части 10 через образующую крышку часть 11. Контактный элемент 9A имеет изогнутую форму и имеет контактные части 91A, предоставленные на одной стороне относительно вала 90A с возможностью входить в контакт с арматурными стержнями S, и соединительную часть 92A, предусмотренную на другой стороне относительно вала 90A и соединенную со второй направляющей 52. В частности, контактные части 91A предусмотрены на одной стороне относительно вала 90A во втором направлении, и соединительная часть 92A предусмотрена на другой стороне.
[0036] Контактный элемент 9A имеет вал 90A, предоставленный рядом с центром между первой направляющей 51 и второй направляющей 52. Контактный элемент 9A также имеет пару контактных частей 91A, предоставленных между первой направляющей 51 и второй направляющей 52 из окрестности части, поддерживаемой посредством вала 90A, к стороне первой направляющей 51. Контактные части 91A предусмотрены на обеих сторонах в третьем направлении относительно виртуальной плоскости Dm (фиг.5), включающей в себя тракт Wf подачи проволоки W, которая проходит через участок 51h паза, для первой направляющей 51, показанной на фиг.3, с интервалом, через который может проходить проволока W, обвязывающая арматурные стержни S. Контактные части 91A проходят в левую и правую стороны первой направляющей 51.
[0037] Контактный элемент 9A также имеет соединительную часть 92A, предусмотренную из части, поддерживаемой посредством вала 90A, к стороне второй направляющей 52, и смещающая часть 93A в контакте с частью на противоположной стороне относительно стороны второй направляющей 52, обращенной к первой направляющей 51, предусмотрена на концевой стороне верхушки соединительной части 92A.
[0038] Контактный элемент 9A выполнен с возможностью вращаться вокруг вала 90A в качестве опорной точки относительно образующей корпус части 10 таким образом, что контактные части 91A перемещаются между позицией готовности (фиг.6A), в которой контактные части 91A выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.6B), в которой контактные части 91A приближаются вплотную к образующей крышку части 11.
[0039] В состоянии, в котором контактный элемент 9A перемещается в позицию для приведения в действие, показанную на фиг.6B, контактный элемент 9A имеет такую форму, при которой контактные части 91A проходят из вала 90A к первой направляющей 51 вдоль второго направления, обозначаемого с помощью стрелки A2. Следовательно, вращение контактного элемента 9A вокруг вала 90A в качестве опорной точки заставляет контактные части 91A перемещаться в первом направлении, обозначаемом с помощью стрелки A1, вдоль дуги, центр которой представляет собой вал 90A. В ходе операции вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52, машина 1A для обвязки арматурных стержней перемещается в первом направлении, обозначаемом с помощью стрелки A1. Вследствие относительного перемещения машины 1A для обвязки арматурных стержней и арматурных стержней S, контактные части 91A подталкиваются посредством силы вдоль первого направления, обозначаемого с помощью стрелки A1, так что контактный элемент 9A перемещается в позицию для приведения в действие. В силу этого, направление перемещения контактных частей 91A вследствие вращения вокруг вала 90A в качестве опорной точки становится направлением вдоль направления силы, посредством которой арматурные стержни S подталкивают контактные части 91A посредством относительного перемещения машины 1A для обвязки арматурных стержней и арматурных стержней S. Кроме того, в состоянии, в котором контактный элемент перемещается в позицию для приведения в действие, показанную на фиг.6B, контактный элемент 9A имеет такую форму, при которой соединительная часть 92A наклоняется вперед от вала 90A относительно контактных частей 91A и проходит ко второй направляющей 52. Вращение контактного элемента 9A вокруг вала 90A в качестве опорной точки заставляет смещающую часть 93A перемещаться во втором направлении, обозначаемом с помощью стрелки A2, вдоль дуги, центр которой представляет собой вал 90A. В силу этого, в состоянии, в котором контактный элемент 9A поджимается посредством поджимающего элемента 54, и вторая направляющая 52 за счет этого располагается в первой позиции, смещающая часть 93A подталкивается в направлении от первой направляющей 51 посредством второй направляющей 52. По этой причине, контактный элемент 9A перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки таким образом, что контактные части 91A выступают из образующей крышку части 11. Следует отметить, что в настоящем примере, контактный элемент 9A выполнен с возможностью перемещаться посредством силы поджимающего элемента 54 для поджимания второй направляющей 52. Тем не менее, также может предоставляться другой поджимающий элемент для поджимания контактного элемента 9A.
[0040] Когда контактные части 91A прижимаются к арматурным стержням S, контактные части 91A контактного элемента 9A перемещаются в первом направлении. В силу этого, контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки и перемещается в позицию для приведения в действие. Когда контактный элемент 9A перемещается в позицию для приведения в действие, смещающая часть 93A перемещается к первой направляющей 51 посредством вращения соединительной части 92A вокруг вала 90A в качестве опорной точки. В силу этого, смещающая часть 93A подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91A и перемещение смещающей части 93A вследствие контакта арматурных стержней S с контактной частью 91A заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию. Поскольку контактный элемент 9A и вторая направляющая 52 сконструированы посредством отдельных компонентов, так называемый вспомогательный усиливающий механизм может быть реализован согласно расстоянию от контактных частей 91A до вала 90A, расстоянию от смещающей части 93A до вала 90A, расстоянию до части, в которой вал 52b второй направляющей 52 и смещающая часть 93A контактного элемента 9A входят в контакт между собой, и т.п. В силу этого, можно оптимизировать рабочую величину контактного элемента 9A и рабочую величину второй направляющей 52.
[0041] Фиг.7 является стороной, иллюстрирующей пример блока вывода, выполненного с возможностью обнаруживать вторую направляющую. Ниже подробно описывается первый блок 12A вывода со ссылкой на каждый чертеж. Машина 1A для обвязки арматурных стержней включает в себя первый блок 12A вывода, выполненный с возможностью обнаруживать то, что вторая направляющая 52 перемещается во вторую позицию, за счет этого выполняя предварительно определенный вывод. Первый блок 12A вывода, например, имеет конфигурацию, в которой его вывод изменяется посредством смещения перемещаемого элемента 120. В настоящем примере, когда контактный элемент 9A перемещается в позицию готовности, и вторая направляющая 52 за счет этого перемещается в первую позицию, вторая направляющая 52 перемещается в направлении от перемещаемого элемента 120. Таким образом, в состоянии, в котором вторая направляющая 52 перемещается в первую позицию, вывод первого блока 12A вывода задается в качестве отключенного состояния. Напротив, когда контактный элемент 9A перемещается в позицию для приведения в действие, и вторая направляющая 52 за счет этого перемещается во вторую позицию, вторая направляющая 52 перемещается в направлении подталкивания перемещаемого элемента 120. Таким образом, в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода задается в качестве включенного состояния.
[0042] В дальнейшем описываются скручивающий блок 7 и блок 8 привода со ссылкой на каждый чертеж. Скручивающий блок 7 включает в себя зацепляющую часть 70, с которой зацепляется проволока W, и приводную часть 71, выполненную с возможностью приводить в действие зацепляющую часть 70. Зацепляющая часть 70 выполнена с возможностью вращаться посредством операции приводной части 71, за счет этого скручивая проволоку W, намотанную на арматурные стержни S.
[0043] Блок 8 привода включает в себя скручивающий электромотор 80, выполненный с возможностью приводить в действие скручивающий блок 7 и т.п., редуктор 81, выполненный с возможностью выполнять замедление и усиление крутящего момента, вращательный вал 72, выполненный с возможностью приводиться в действие и вращаться через редуктор 81 посредством скручивающего электромотора 80, и подвижный элемент 83, выполненный с возможностью передавать движущую силу в режущий блок 6 и регулирующий элемент 42. Скручивающий блок 7 и блок 8 привода размещаются таким образом, что центры вращения вращательного вала 82, приводной части 71 и зацепляющей части 70 находятся на идентичной оси. Центры вращения вращательного вала 82, приводной части 71 и зацепляющей части 70 называются "осевой линией Ax".
[0044] Зацепляющая часть 70 формируется с первым каналом, через который проходит проволока W, подаваемая в режущий блок 6 посредством блока 3 подачи, и вторым каналом, через который проходит проволока W, загибаемая посредством регулирующей части 4 и направляемая в скручивающий блок 7 посредством направляющей части 5.
[0045] Блок 8 привода выполнен с возможностью перемещать приводную часть 71 вдоль осевого направления вращательного вала 82 посредством операции вращения вращательного вала 82. Приводная часть 71 перемещается вдоль осевого направления вращательного вала 82 таким образом, что зацепляющая часть 70 удерживает концевую сторону верхушки проволоки W, направляемой в скручивающий блок 7 посредством направляющей части 5.
[0046] В блоке 8 привода, подвижный элемент 83 выполнен с возможностью перемещаться вдоль осевого направления вращательного вала 82 в сочетании с операцией перемещения приводной части 71 вдоль осевого направления вращательного вала 82 таким образом, что движение подвижного элемента 83 передается в регулирующий элемент 42 посредством трансмиссионного механизма 44, и регулирующий элемент 42 за счет этого перемещается в позицию, в которой он не контактирует с помощью проволоки. Помимо этого, приводная часть 71 выполнена с возможностью перемещаться вдоль осевого направления вращательного вала 82 таким образом, что движение подвижного элемента 83 передается в часть 61 с подвижным лезвием посредством трансмиссионного механизма 62, и часть 61 с подвижным лезвием за счет этого приводится в действие для того, чтобы отрезать проволоку W.
[0047] Блок 8 привода выполнен с возможностью вращать приводную часть 71, перемещаемую вдоль осевого направления вращательного вала 82 посредством операции вращения вращательного вала 82. Приводная часть 71 выполнена с возможностью вращаться вокруг оси вращательного вала 82, за счет этого скручивая проволоку W посредством зацепляющей части 70.
[0048] Фиг.8 является функциональной блок-схемой машины для обвязки арматурных стержней по первому варианту осуществления. В машине 1A для обвязки арматурных стержней, блок 100A управления выполнен с возможностью обнаруживать выводы первого блока 12A вывода, выполненного с возможностью приводиться в действие по мере того, как контактный элемент 9A прижимается к арматурным стержням S, и второго блока 13 вывода, выполненного с возможностью приводиться в действие по мере того, как курок 10t нажимается. Блок 100A управления выполнен с возможностью управлять подающим электромотором 31, выполненным с возможностью приводить в действие подающие шестерни 30, и скручивающим электромотором 80, выполненным с возможностью приводить в действие скручивающий блок 7 и т.п., в ответ на выводы первого блока 12A вывода и второго блока 13 вывода, за счет этого выполняя последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0049] В дальнейшем описываются операции обвязки арматурных стержней S с помощью проволоки W посредством машины 1A для обвязки арматурных стержней. Рабочий захватывает часть 10h в виде рукоятки машины 1A для обвязки арматурных стержней рукой, совмещает позицию направляющей части 5 с точкой пересечения двух арматурных стержней S и вставляет арматурные стержни S в отверстие 53 для вставки/вытаскивания.
[0050] Согласно машине 1A для обвязки арматурных стержней, в состоянии, в котором арматурные стержни S не вставляются в отверстие 53 для вставки/вытаскивания, как показано на фиг.6A, вторая направляющая 52 перемещается в первую позицию таким образом, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 увеличивается. В силу этого, проще вставлять арматурные стержни S в отверстие 53 для вставки/вытаскивания.
[0051] Рабочий прижимает арматурные стержни S к контактным частям 91A контактного элемента 9A посредством операции перемещения машины 1A для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания.
[0052] Вследствие операции перемещения машины 1A для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, к контактному элементу 9A прикладывается сила вдоль направления перемещения машины 1A для обвязки арматурных стержней таким образом, что контактные части 91A подталкиваются. В силу этого, контактные части 91A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки, за счет этого перемещаясь в позицию для приведения в действие, как показано на фиг.6B.
[0053] Когда два пересекающихся арматурных стержня S вставляются в отверстие 53 для вставки/вытаскивания, один арматурный стержень S расположен в одной боковой части первой направляющей 51, и другой арматурный стержень S расположен в другой боковой части первой направляющей 51. Напротив, пара контактных частей 91A контактного элемента 9A проходит из места между первой направляющей 51 и второй направляющей 52 к левой и правой сторонам первой направляющей 51. В силу этого, арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания, надежно входят в контакт с контактными частями 91A таким образом, что контактный элемент 9A может перемещаться в позицию для приведения в действие. Помимо этого, контактные части 91A контактного элемента 9A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, посредством операции вращения вокруг вала 90A в качестве опорной точки. В силу этого, контактные части 91A могут подталкиваться посредством операции перемещения машины 1A для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, и необязательно перемещать машину 1A для обвязки арматурных стержней в другом направлении таким образом, чтобы приводить в действие контактный элемент 9A.
[0054] Когда контактный элемент 9A перемещается в позицию для приведения в действие, вращение соединительной части 92A вокруг вала 90A в качестве опорной точки заставляет смещающую часть 93A подталкивать вторую направляющую 52 к первой направляющей 51 таким образом, что вторая направляющая 52 перемещается во вторую позицию.
[0055] Когда вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода становится включенным, и блок 100A управления обнаруживает то, что вывод первого блока 12A вывода становится включенным.
[0056] Рабочий нажимает курок 10t в состоянии, в котором арматурные стержни S прижимаются к контактным частям 91A контактного элемента 9A. Курок 10t нажимается, так что вывод второго блока 13 вывода становится включенным, и блок 100A управления обнаруживает то, что вывод второго блока 13 вывода становится включенным.
[0057] Когда обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок 100A управления управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Альтернативно, когда операция прижатия арматурных стержней S к контактным частям 91A контактного элемента 9A выполняется, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и вывод второго блока 13 вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0058] Далее описывается пример последовательности операций обвязки арматурных стержней S с помощью проволоки W. Подающий электромотор 31 вращается в прямом направлении, и подающие шестерни 30 за счет этого вращаются в прямом направлении таким образом, что проволока W подается в прямом направлении, обозначаемом с помощью стрелки F. Проволока W, подаваемая в прямом направлении посредством блока 3 подачи, проходит через часть 60 с неподвижным лезвием, которая представляет собой первый регулирующий элемент, составляющий регулирующую часть 4, и регулирующий элемент 42, который представляет собой второй регулирующий элемент. Проволока W, проходящая через регулирующий элемент 42, входит в контакт с направляющей поверхностью 51g первой направляющей 51 и в силу этого направляется в регулирующий элемент 43, который представляет собой третий регулирующий элемент.
[0059] В силу этого, проволока W, подаваемая в прямом направлении посредством блока 3 подачи, входит в контакт с частью 60 с неподвижным лезвием, регулирующим элементом 42, регулирующим элементом 43 и направляющей поверхностью 51g первой направляющей 51 и в силу этого изгибается в дугообразную форму. Затем проволока W, подаваемая в прямом направлении посредством блока 3 подачи, входит в контакт с частью 60 с неподвижным лезвием и регулирующим элементом 43 из внешнего периферийного направления дугообразной формы и входит в контакт с регулирующим элементом 42 между частью 60 с неподвижным лезвием и регулирующим элементом 43 из внутреннего периферийного направления дугообразной формы таким образом, что практически круглый загиб формируется.
[0060] Концевой участок 51c первой направляющей 51 и концевой участок 52c второй направляющей 52 разнесены на предварительно определенный интервал в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию. Тем не менее, в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, пара боковых направляющих 52a позиционируется на тракте Wf подачи проволоки W, и проволока W, подаваемая в прямом направлении посредством блока 3 подачи, загибается посредством регулирующей части 4, как описано выше, так что проволока направляется между парой боковых направляющих 52a второй направляющей 52.
[0061] Проволока W, направляемая между парой боковых направляющих 52a второй направляющей 52, подается в прямом направлении посредством блока 3 подачи таким образом, что проволока направляется в зацепляющую часть 70 скручивающего блока 7 посредством пары боковых направляющих 52a второй направляющей 52. После этого, когда определяется то, что концевой участок верхушки проволоки W подается в предварительно определенную позицию, блок 100A управления прекращает приведение в действие подающего электромотора 31. В силу этого, проволока W спирально наматывается вокруг арматурных стержней S. Следует отметить, что в состоянии, в котором вторая направляющая 52 не перемещается во вторую позицию, и вывод второго блока 12A вывода выключен, блок 100A управления не выполняет подачу проволоки W. В силу этого, проволока W не зацепляется с зацепляющей частью 70 скручивающего блока 7, и подавляется возникновение плохой подачи. Таким образом, когда вторая направляющая 52 расположена во второй позиции, проволока W может направляться в зацепляющую часть 70 скручивающего блока 7.
[0062] После прекращения подачи проволоки W в прямом направлении, блок 100A управления вращает электромотор 80 в прямом направлении. Скручивающий электромотор 80 вращается в прямом направлении таким образом, что зацепляющая часть 70 приводится в действие посредством приводной части 71, и концевая сторона верхушки проволоки W удерживается посредством зацепляющей части 70.
[0063] Когда определяется то, что скручивающий электромотор 80 вращается до тех пор, пока проволока W не удерживается посредством зацепляющей части 70, блок 100A управления прекращает вращение скручивающего электромотора 80 и вращает подающий электромотор 31 в обратном направлении. Когда скручивающий электромотор 80 вращается до тех пор, пока проволока W не удерживается посредством зацепляющей части 70, движение подвижного элемента 83 передается в регулирующий элемент 42 посредством трансмиссионного механизма 44 таким образом, что регулирующий элемент 42 перемещается в позицию, в которой он не входит в контакт с помощью проволоки.
[0064] Когда подающий электромотор 31 вращается в обратном направлении, подающие шестерни 30 вращаются в обратном направлении таким образом, что проволока W подается в обратном направлении, обозначаемом с помощью стрелки R. Посредством операции подачи проволоки W в обратном направлении, проволока W наматывается в тесном контакте с арматурными стержнями S.
[0065] Когда определяется то, что подающий электромотор 31 вращается в обратном направлении до тех пор, пока проволока W не наматывается на арматурные стержни S, блок 100A управления прекращает вращение подающего электромотора 31 и затем вращает скручивающий электромотор 80 в прямом направлении. Скручивающий электромотор 80 вращается в прямом направлении таким образом, что часть 61 с подвижным лезвием приводится в действие через трансмиссионный механизм 62 посредством подвижного элемента 83, и проволока W в силу этого отрезается.
[0066] После того, как проволока W отрезается, скручивающий электромотор 80 непрерывно вращается в прямом направлении, за счет этого вращая зацепляющую часть 70 с возможностью скручивать проволоку W.
[0067] Когда определяется то, что скручивающий электромотор 80 вращается в прямом направлении до тех пор, пока проволока W не скручивается, блок 100A управления вращает скручивающий электромотор 80 в обратном направлении. Скручивающий электромотор 80 вращается в обратном направлении таким образом, что зацепляющая часть 70 возвращается в начальную позицию, и удерживаемое состояние проволоки W в силу этого прекращается. В силу этого, проволока W, обвязывающая арматурные стержни S, может вытаскиваться из зацепляющей части 70.
[0068] Когда определяется то, что скручивающий электромотор 80 вращается в обратном направлении до тех пор, пока зацепляющая часть 70 и т.п. не возвращается в начальную позицию, блок 100A управления прекращает вращение скручивающего электромотора 80.
[0069] Рабочий перемещает машину 1A для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S, обвязанных с помощью проволоки W, из отверстия 53 для вставки/вытаскивания. Когда сила подталкивания контактных частей 91A контактного элемента 9A не прикладывается посредством операции перемещения машины 1A для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S из отверстия 53 для вставки/вытаскивания, вторая направляющая 52 перемещается из второй позиции в первую позицию посредством силы поджимающего элемента 54.
[0070] Когда вторая направляющая 52 перемещается в первую позицию, контактный элемент 9A подталкивается в направлении, в котором смещающая часть 93A отходит от первой направляющей 51, и перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки таким образом, что контактные части 91A выступают из образующей крышку части 11.
[0071] Операция рабочего для перемещения машины 1A для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S, обвязанных с помощью проволоки W, из отверстия 53 для вставки/вытаскивания заставляет вторую направляющую 52 перемещаться в первую позицию таким образом, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 увеличивается. В силу этого, арматурные стержни S могут проще вытаскиваться из отверстия 53 для вставки/вытаскивания.
[0072] Фиг.9A и 9B являются видами сбоку, иллюстрирующими модифицированный вариант осуществления подвижной направляющей части. В подвижной направляющей части по модифицированному варианту осуществления, контактный элемент 9B, с которым входят в контакт арматурные стержни S, и соединительная часть 92B, соединенная со второй направляющей 52, сконструированы посредством отдельных компонентов, вместо конструирования как единое целое. Контактный элемент 9B также выполнен с возможностью линейно перемещаться.
[0073] Контактный элемент 9B присоединяется к боковой части для образующей корпус части 10 с поддержкой посредством множества валов 94B. Контактный элемент 9B имеет форму, протягивающуюся в первом направлении, обозначаемом с помощью стрелки A1, концевой участок верхушки в первом направлении содержит контактные части 91B, обращенные к отверстию 53 для вставки/вытаскивания, и часть на одной стороне во втором направлении, обозначаемом с помощью стрелки A2, содержит приводную часть 95B для приведения в действие соединительной части 92B. Приводная часть 95B сконструирована посредством скошенной поверхности, имеющей неровность в первом направлении. Контактные части 91B предусмотрены на обеих сторонах в третьем направлении с интервалом, через который может проходить проволока W, обвязывающая арматурные стержни S. Контактные части 91B проходят в левую и правую стороны первой направляющей 51. Контактные части 91B также могут быть выполнены с возможностью протягиваться в левую и правую стороны второй направляющей 52.
[0074] Контактный элемент 9B имеет продолговатые отверстия 96B в первом направлении, обозначаемом с помощью стрелки A1, и валы 94B вставляются в продолговатые отверстия 96B. В силу этого, контактный элемент 9B может перемещаться в первом направлении, обозначаемом с помощью стрелки A1, относительно образующей корпус части 10, и выполнен с возможностью перемещаться между позицией готовности (фиг.9A), в которой контактные части 91B выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.9B), в которой контактные части 91B приближаются вплотную к образующей крышку части 11.
[0075] Контактный элемент 9B поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности.
[0076] Соединительная часть 92B присоединяется к образующей крышку части 11 с поддержкой посредством вала 90B. Соединительная часть 92B содержит приводимую часть 97B, которая может входить в контакт с возможностью скольжения с приводной частью 95B контактного элемента 9B, на одной стороне, с размещением вала 90B между ними, и содержит смещающую часть 93B, которая находится в контакте с частью на противоположной стороне относительно стороны второй направляющей 52, обращенной к первой направляющей 51, на другой стороне, с размещением вала 90B между ними.
[0077] В состоянии, в котором арматурные стержни S не находятся в контакте с контактными частями 91B контактного элемента 9B, контактный элемент 9B поджимается в направлении, в котором контактные части 91B выступают из образующей крышку части 11, посредством поджимающего элемента (не показан), отдельного от поджимающего элемента 54 для поджимания второй направляющей 52, за счет этого перемещаясь в позицию готовности, показанную на фиг.9A. Когда контактный элемент 9B перемещается в позицию готовности, соединительная часть 92B может вращаться вокруг вала 90B в качестве опорной точки в направлении, в котором приводимая часть 97B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B отходит от первой направляющей 51. В силу этого, вторая направляющая 52 поджимается посредством поджимающего элемента 54 и перемещается в первую позицию. Позиция второй направляющей 52 обнаруживается посредством первого блока 12A вывода, описанного со ссылкой на фиг.7, и вывод первого блока 12A вывода становится выключенным в состоянии, в котором вторая направляющая 52 перемещается в первую позицию.
[0078] Когда арматурные стержни S прижимаются к контактным частям 91B, контактный элемент 9B перемещается в позицию для приведения в действие вдоль первого направления, обозначаемого с помощью стрелки A1. Когда контактный элемент 9B перемещается в позицию для приведения в действие, приводимая часть 97B соединительной части 92B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B перемещается к первой направляющей 51 посредством вращения соединительной части 92B вокруг вала 90B в качестве опорной точки. В силу этого, смещающая часть 93B подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. В состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода становится включенным. Таким образом, контакт арматурных стержней S с контактными частями 91B и перемещение смещающей части 93B вследствие контакта арматурных стержней S с контактными частями 91B заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0079] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие таким образом, что вторая направляющая 52 за счет этого перемещается во вторую позицию, и обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда арматурные стержни S прижимаются к контактным частям 91B контактного элемента 9B, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0080] Контактный элемент 9B содержит продолговатые отверстия 96B в первом направлении, обозначаемом с помощью стрелки A1, и валы 94B вставляются в продолговатое отверстие 96B таким образом, что контактный элемент 9B линейно перемещается в первом направлении. В ходе операции вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52, машина 1A для обвязки арматурных стержней перемещается в первом направлении, обозначаемом с помощью стрелки A1. Вследствие относительного перемещения машины 1A для обвязки арматурных стержней и арматурных стержней S, контактные части 91B контактного элемента 9B подталкиваются посредством силы вдоль первого направления, обозначаемого с помощью стрелки A1. В силу этого, направление перемещения контактного элемента 9B становится направлением вдоль направления силы, посредством которой арматурные стержни S подталкивают контактные части 91B посредством относительного перемещения машины 1A для обвязки арматурных стержней и арматурных стержней S. Напротив, контактный элемент 9B и соединительная часть 92B сконструированы посредством отдельных компонентов таким образом, что соединительная часть 92B может перемещать вторую направляющую 52 посредством вращения вокруг вала 90B в качестве опорной точки. В силу этого, можно оптимизировать направление перемещения контактного элемента 9B, который подталкивается и приводится в действие посредством арматурных стержней S, и направление перемещения соединительной части 92B для перемещения второй направляющей 52, соответственно.
[0081] Фиг.10A и 10B являются видами сбоку, иллюстрирующими модифицированный вариант осуществления направляющей части. На фиг.10A вторая направляющая 52 содержит продолговатое отверстие 55, протягивающееся во втором направлении, обозначаемом с помощью стрелки A2, и вал 56, предоставленный в образующей корпус части 10, вставляется в продолговатое отверстие 55. В силу этого, вторая направляющая 52 может линейно перемещаться во втором направлении, обозначаемом с помощью стрелки A2 относительно образующей корпус части 10, и выполнена с возможностью перемещать первую позицию, показанную с помощью штрихпунктирной линии с двумя точками на фиг.10A, и вторую позицию, показанную с помощью сплошной линии на фиг.10A.
[0082] В состоянии, в котором вторая направляющая 52 расположена в первой позиции, интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 увеличивается таким образом, что арматурные стержни S могут проще вставляться в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52.
[0083] Когда арматурные стержни S вставляются в отверстие 53 для вставки/вытаскивания и достигают предварительно определенного состояния, вторая направляющая 52 перемещается из первой позиции во вторую позицию посредством подвижной направляющей части (не показана). В состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 становится меньше, чем в состоянии, в котором вторая направляющая 52 перемещается в первую позицию.
[0084] На фиг.10B, любая из первой направляющей 51 и второй направляющей 52 либо обе из первой направляющей 51 и второй направляющей 52 выполнены с возможностью быть перемещаемыми в направлении к и друг от друга.
[0085] В состоянии, в котором любая из первой направляющей 51 и второй направляющей 52 либо обе из первой направляющей 51 и второй направляющей расположены в первой позиции, показанной с помощью штрихпунктирной линии с двумя точками на фиг.10B, интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 увеличивается таким образом, что арматурные стержни S могут проще вставляться в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52.
[0086] Когда арматурные стержни S вставляются в отверстие 53 для вставки/вытаскивания и достигают предварительно определенного состояния, любая из первой направляющей 51 и второй направляющей 52 либо обе из первой направляющей 51 и второй направляющей 52 перемещаются из первой позиции во вторую позицию посредством подвижной направляющей части (не показана). В состоянии, в котором любая из первой направляющей 51 и второй направляющей 52 либо обе из первой направляющей 51 и второй направляющей 52 перемещаются во вторую позицию, расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51, меньше по сравнению с состоянием, в котором любая из первой направляющей 51 и второй направляющей 52 либо обе из первой направляющей 51 и второй направляющей 52 перемещаются в первую позицию.
[0087] Фиг.11A и 11B являются видами сбоку, иллюстрирующими другой модифицированный вариант осуществления направляющей части. На фиг.11A и 11B, вторая направляющая 52 поджимается в направлении перемещения из первой позиции во вторую позицию посредством поджимающего элемента (не показан), такого как крутильная спиральная пружина.
[0088] Контактный элемент 9C имеет соединительную часть 92C, предусмотренную из части, поддерживаемой посредством вала 90C, к стороне второй направляющей 52, и смещающая часть 93C, которая находится в контакте со смещаемой частью 57, предоставленной во второй направляющей 53 со стороны, обращенной к первой направляющей 51, предусмотрена в соединительной части 92C.
[0089] Контактный элемент 9C поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности. Здесь, сила поджимания контактного элемента 9C в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) задается выше силы поджимания второй направляющей 52 в направлении перемещения из первой позиции во вторую позицию посредством поджимающего элемента (не показан). В силу этого, контактный элемент 9C удерживается в позиции готовности, и вторая направляющая 52 также удерживается в первой позиции.
[0090] В состоянии, в котором арматурные стержни S не находятся в контакте с контактными частями 91C контактного элемента 9C, контактный элемент 9C поджимается в направлении, в котором контактные части 91C выступают из образующей крышку части 11 посредством поджимающего элемента (не показан), и в силу этого перемещается в позицию готовности, показанную на фиг.11A. Когда контактный элемент 9C перемещается в позицию готовности, смещающая часть 93C контактного элемента 9C перемещается в направлении от первой направляющей 51. В силу этого, смещаемая часть 57 второй направляющей 52 подталкивается посредством смещающей части 93C контактного элемента 9C таким образом, что вторая направляющая 52 перемещается в первую позицию. Позиция второй направляющей 52 обнаруживается посредством первого блока 12A вывода, описанного относительно фиг.7, и вывод первого блока 12A вывода становится выключенным в состоянии, в котором вторая направляющая 52 перемещается в первую позицию.
[0091] Когда контактные части 91C прижимаются к арматурным стержням S, контактные части 91C перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9C вращается вокруг вала 90C в качестве опорной точки и перемещается в позицию для приведения в действие. Когда контактный элемент 9C перемещается в позицию для приведения в действие, смещающая часть 93C перемещается к первой направляющей 51 посредством вращения соединительной части 92C вокруг вала 90C в качестве опорной точки. В силу этого, вторая направляющая 52 поджимается посредством поджимающего элемента (не показан) и в силу этого перемещается во вторую позицию. В состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода становится включенным. Таким образом, контакт арматурных стержней S с контактными частями 91C и перемещение смещающей части 93C вследствие контакта арматурных стержней S с контактными частями 91C заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0092] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9C перемещается в позицию для приведения в действие таким образом, что вторая направляющая 52 перемещается во вторую позицию, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше.
[0093] Фиг.12A и 12B являются видами сбоку, иллюстрирующими модифицированный вариант осуществления блока вывода, выполненного с возможностью обнаруживать вторую направляющую. Фиг.12A и 12B иллюстрируют пример, в котором первый блок 12B вывода сконструирован посредством бесконтактного датчика. В настоящем примере, первый блок 12B вывода сконструирован посредством датчика с использованием элемента Холла.
[0094] Вторая направляющая 52 имеет элемент 58 обнаружения, выполненный с возможностью перемещаться посредством вращения вокруг вала 52b в качестве опорной точки. Как показано на фиг.12A, когда вторая направляющая 52 перемещается в первую позицию, элемент 58 обнаружения перемещается за пределы позиции обнаружения первого блока 12B вывода. Кроме того, как показано на фиг.12B, когда вторая направляющая 52 перемещается во вторую позицию, элемент 58 обнаружения перемещается в позицию обнаружения первого блока 12B вывода.
[0095] Когда контактный элемент 9A перемещается в позицию готовности, как показано на фиг.6A, и вторая направляющая 52 за счет этого перемещается в первую позицию, элемент 58 обнаружения перемещается за пределы позиции обнаружения первого блока 12B вывода. Таким образом, в состоянии, в котором элемент 58 обнаружения второй направляющей 52 перемещается за пределы позиции обнаружения первого блока 12B вывода, вывод первого блока 12B вывода задается в качестве отключенного состояния. Напротив, когда контактный элемент 9A перемещается в позицию для приведения в действие, как показано на фиг.6B, и вторая направляющая 52 за счет этого перемещается во вторую позицию, элемент 58 обнаружения перемещается в позицию обнаружения первого блока 12B вывода. Таким образом, в состоянии, в котором элемент 58 обнаружения второй направляющей 52 перемещается в позицию обнаружения первого блока 12B вывода, вывод первого блока 12B вывода задается в качестве включенного состояния.
[0096] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, и в силу этого обнаруживается то, что вывод первого блока 12B вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда вторая направляющая 52 перемещается во вторую позицию, и в силу этого обнаруживается то, что вывод первого блока 12B вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0097] Первый блок 12B вывода сконструирован посредством бесконтактного датчика, так что ошибочное обнаружение вследствие отходов и т.п. может уменьшаться.
[0098] Фиг.13A, 13B, 14A, 14B, 15A и 15B являются видами сбоку, иллюстрирующими модифицированные варианты осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент. На фиг.13A, 13B, 14A, 14B, 15A и 15B, когда обнаруживается то, что контактный элемент перемещается в позицию для приведения в действие, определяется то, что вторая направляющая 52 перемещается во вторую позицию.
[0099] Как описано со ссылкой на фиг.6A и 6B, фиг.13A и 14B иллюстрируют конфигурацию, в которой вторая направляющая 52 перемещается в первую позицию и вторую позицию посредством операции вращения вокруг вала 52b в качестве опорной точки, и вторая направляющая 52 поджимается в направлении перемещения из второй позиции в первую позицию посредством поджимающего элемента 54 и удерживается в первой позиции. В этой конфигурации, предусмотрен первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент перемещается в позицию для приведения в действие. Следует отметить, что в настоящем примере, контактный элемент 9A перемещается посредством силы поджимающего элемента 54 для поджимания второй направляющей 52. Тем не менее, может предоставляться другой поджимающий элемент для поджимания контактного элемента 9A.
[0100] Первый блок 14A вывода может иметь аналогичную конфигурацию с первым блоком 12A вывода, описанным со ссылкой на фиг.7. Например, его вывод изменяется посредством смещения перемещаемого элемента 140. В настоящем примере, как показано на фиг.13A, когда контактный элемент 9A перемещается в позицию готовности, контактные части 91A контактного элемента 9A перемещаются в направлении от перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, как показано на фиг.13B, когда контактный элемент 9A перемещается в позицию для приведения в действие, контактные части 91A контактного элемента 9A перемещаются в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9A перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0101] Как показано на фиг.13A в состоянии, в котором вторая направляющая 52 расположена в первой позиции, смещающая часть 93A подталкивается в направлении от первой направляющей 51 таким образом, что контактный элемент 9A перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки. В состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода становится выключенным.
[0102] Когда контактные части 91A прижимаются к арматурным стержням S, контактные части 91A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки и перемещается в позицию для приведения в действие, как показано на фиг.13B. В состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода становится включенным. Помимо этого, когда контактный элемент 9A перемещается в позицию для приведения в действие, смещающая часть 93A перемещается к первой направляющей 51 посредством вращения соединительной части 92A вокруг вала 90A в качестве опорной точки. В силу этого, смещающая часть 93A подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Следовательно, обнаруживается то, что контактный элемент 9A перемещается в позицию для приведения в действие таким образом, что может определяться то, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91A и перемещение смещающей части 93A вследствие контакта арматурных стержней S с контактной частью 91A заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0103] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9E перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда контактный элемент 9C перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0104] Как описано со ссылкой на фиг.9A и 9B, фиг.14A и 14B иллюстрируют конфигурацию, в которой контактный элемент 9B, с которым входят в контакт арматурные стержни S, и соединительная часть 92B, соединенная со второй направляющей 52, сконструированы посредством отдельных компонентов, вместо конструирования как единое целое, и контактный элемент 9B линейно перемещается. В этих конфигурациях, предусмотрен первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент 9B перемещается в позицию для приведения в действие.
[0105] Как показано на фиг.14A, когда контактный элемент 9B перемещается в позицию готовности, контактный элемент 9B перемещается в направлении от перемещаемого элемента 140 первого блока 14A вывода. Таким образом, в состоянии, в котором контактный элемент 9B перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, как показано на фиг.14B, когда контактный элемент 9B перемещается в позицию для приведения в действие, контактный элемент 9B перемещается в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0106] В состоянии, в котором арматурные стержни S не входят в контакт с контактными частями 91B контактного элемента 9B, контактный элемент 9B поджимается в направлении, в котором контактные части 91B выступают из образующей крышку части 11 посредством поджимающего элемента (не показан), и в силу этого перемещается в позицию готовности, показанную на фиг.14A. В состоянии, в котором контактный элемент 9B перемещается в позицию готовности, вывод первого блока 14A вывода становится выключенным. Помимо этого, когда контактный элемент 9B перемещается в позицию готовности, соединительная часть 92B может вращаться вокруг вала 90B в качестве опорной точки в направлении, в котором приводимая часть 97B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B отходит от первой направляющей 51. В силу этого, вторая направляющая 52 перемещается в первую позицию.
[0107] Когда арматурные стержни S прижимаются к контактным частям 91B, контактный элемент 9B перемещается в позицию для приведения в действие вдоль первого направления, обозначаемого с помощью стрелки A1, как показано на фиг.14B. В состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие, вывод первого блока 14A вывода становится включенным. Помимо этого, когда контактный элемент 9B перемещается в позицию для приведения в действие, приводимая часть 97B соединительной части 92B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B перемещается к первой направляющей 51 посредством вращения соединительной части 92B вокруг вала 90B в качестве опорной точки. В силу этого, смещающая часть 93B подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Следовательно, обнаруживается то, что контактный элемент 9B перемещается в позицию для приведения в действие таким образом, что может определяться то, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91B и перемещение смещающей части 93B вследствие контакта арматурных стержней S с контактными частями 91B заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0108] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда контактный элемент 9B перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0109] Как описано со ссылкой на фиг.11A и 11B, фиг.15A и 15B иллюстрируют конфигурацию, в которой вторая направляющая 52 перемещается в первую позицию и вторую позицию посредством операции вращения вокруг вала 52b в качестве опорной точки, и вторая направляющая 52 поджимается в направлении перемещения из первой позиции во вторую позицию посредством поджимающего элемента (не показан) и удерживается во второй позиции. В этой конфигурации, предусмотрен первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент перемещается в позицию для приведения в действие. Здесь, сила поджимания контактного элемента 9C в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) задается выше силы поджимания второй направляющей 52 в направлении перемещения из первой позиции во вторую позицию посредством поджимающего элемента (не показан). В силу этого, контактный элемент 9C удерживается в позиции готовности, и вторая направляющая 52 также удерживается в первой позиции.
[0110] Как показано на фиг.15A, когда контактный элемент 9C перемещается в позицию готовности, контактные части 91C контактного элемента 9C перемещаются в направлении от перемещаемого элемента 140 первого блока 14A вывода. Таким образом, в состоянии, в котором контактный элемент 9C перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, как показано на фиг.15B, когда контактный элемент 9C перемещается в позицию для приведения в действие, контактные части 91C контактного элемента 9C перемещаются в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9C перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0111] В состоянии, в котором арматурные стержни S не находятся в контакте с контактными частями 91C контактного элемента 9C, контактный элемент 9C поджимается в направлении, в котором контактные части 91C выступают из образующей крышку части 11 посредством поджимающего элемента (не показан), и в силу этого перемещается в позицию готовности, как показано на фиг.15A. В состоянии, в котором контактный элемент 9C перемещается в позицию готовности, вывод первого блока 14A вывода становится выключенным. Помимо этого, когда контактный элемент 9C перемещается в позицию готовности, смещающая часть 93C контактного элемента 9C перемещается в направлении от первой направляющей 51. В силу этого, смещаемая часть 57 второй направляющей 52 подталкивается посредством смещающей части 93C контактного элемента 9C таким образом, что вторая направляющая 52 перемещается в первую позицию.
[0112] Когда контактные части 91C прижимаются к арматурным стержням S, контактные части 91C перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9C вращается вокруг вала 90C в качестве опорной точки и перемещается в позицию для приведения в действие. В состоянии, в котором контактный элемент 9C перемещается в позицию для приведения в действие, вывод первого блока 14A вывода становится включенным. Помимо этого, когда контактный элемент 9C перемещается в позицию для приведения в действие, смещающая часть 93C перемещается к первой направляющей 51 посредством вращения соединительной части 92C вокруг вала 90C в качестве опорной точки. В силу этого, вторая направляющая 52 перемещается во вторую позицию. Следовательно, обнаруживается то, что контактный элемент 9C перемещается в позицию для приведения в действие таким образом, что может определяться то, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91C и перемещение смещающей части 93C вследствие контакта арматурных стержней S с контактными частями 91C заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0113] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9C перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда контактный элемент 9C перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0114] Следует отметить, что, на фиг.13A, 13B, 14A, 14B, 15A и 15B, блок вывода, выполненный с возможностью обнаруживать то, что контактный элемент перемещается в позицию для приведения в действие, также может быть сконструирован посредством бесконтактного датчика, описанного со ссылкой на фиг.12A и 12B.
[0115] Пример машины для обвязки арматурных стержней по второму варианту осуществления
Фиг.16 является видом сбоку, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления, фиг.17 является видом сверху, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления, и фиг.18 является видом в перспективе, иллюстрирующим пример общей конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
[0116] Машина 1B для обвязки арматурных стержней по второму варианту осуществления включает в себя первую образующую корпус часть 301, вторую образующую корпус часть 302 и удлиненную соединительную часть 303, выполненную с возможностью соединять первую образующая корпус часть 301 и вторую образующая корпус часть 302. Первая образующая корпус часть 301 включает в себя части 304h в виде рукоятки, имеющие пару захватных частей 304L и 304R, которые могут захватываться рабочим.
[0117] Фиг.19 является видом в перспективе, иллюстрирующим пример части в виде рукоятки. Часть 304h в виде рукоятки имеет рабочую часть 304t, предусмотренную в захватной части 304R, которая захватывается главным образом правой рукой. Рабочая часть 304t присоединяется к захватной части 304R таким образом, что она является вращающейся вокруг вала (не показан) в качестве опорной точки, и выступает из поверхности захватной части 304R. Рабочая часть 304t захватывается вместе с захватной частью 304R рабочим таким образом, что она вращается относительно захватной части 304R и за счет этого приводится в действие.
[0118] Фиг.20 является видом сбоку, иллюстрирующим пример внутренней конфигурации машины для обвязки арматурных стержней по второму варианту осуществления, и фиг.21 является видом сбоку, иллюстрирующим основные части внутренней конфигурации машины для обвязки арматурных стержней по второму варианту осуществления.
[0119] Вторая образующая корпус часть 302 имеет размещающую часть 2, выполненную с возможностью размещать с возможностью вращения проволочную бобину 20, на которую наматывается проволока W, и блок 3 подачи, выполненный с возможностью подавать проволоку W, намотанную на проволочную бобину 20, размещенную в размещающей части 2. Вторая образующая корпус часть 302 также имеет регулирующую часть 4, выполненную с возможностью загибать проволоку W, подаваемую посредством блока 3 подачи, и направляющую часть 5, выполненную с возможностью направлять проволоку W, загибаемую посредством регулирующей части 4. Вторая образующая корпус часть 302 также имеет режущий блок 6, выполненный с возможностью отрезать проволоку W, скручивающий блок 7, выполненный с возможностью скручивать проволоку W, и блок 8 привода, выполненный с возможностью приводить в действие режущий блок 6, скручивающий блок 7 и т.п.
[0120] В машине 1B для обвязки арматурных стержней, направляющая часть 5 предусмотрена на одной стороне второй части 302 корпуса. В настоящем варианте осуществления, сторона, на которой предусмотрена направляющая часть 5, задается как передняя сторона. В машине 1B для обвязки арматурных стержней, первая образующая корпус часть 301 и вторая образующая корпус часть 302 соединяются посредством соединительной части 303 таким образом, что направляющая часть 5 и часть 304h в виде рукоятки проходят между ними, по сравнению с машиной для обвязки арматурных стержней без соединительной части 303.
[0121] Размещающая часть 2 имеет такую конфигурацию, в которой проволочная бобина 20 может присоединяться/отсоединяться и поддерживаться. Блок 3 подачи имеет пару подающих шестерней 30 в качестве подающего элемента. Когда электромотор (не показан) вращает подающие шестерни 30 в состоянии, в котором проволока W размещается посередине между парой подающих шестерней 30, блок 3 подачи подает проволоку W. Блок 3 подачи может подавать проволоку W в прямом направлении, обозначаемом с помощью стрелки F, и в обратном направлении, обозначаемом с помощью стрелки R, согласно направлению вращения подающих шестерней 30.
[0122] Режущий блок 6 предусмотрен ниже блока 3 подачи относительно подачи проволоки W в прямом направлении, обозначаемом с помощью стрелки F. Режущий блок 6 имеет часть 60 с неподвижным лезвием и часть 61 с подвижным лезвием, выполненную с возможностью отрезать проволоку W, совместно с частью 60 с неподвижным лезвием. Режущий блок 6 также имеет трансмиссионный механизм 62, выполненный с возможностью передавать движение блока 8 привода в часть 61 с подвижным лезвием.
[0123] Часть 60 с неподвижным лезвием имеет отверстие 60a, через которое проходит проволока W. Часть 61 с подвижным лезвием выполнена с возможностью отрезать проволоку W, проходящую через отверстие 60a части 60 с неподвижным лезвием, посредством операции вращения вокруг части 60 с неподвижным лезвием в качестве опорной точки.
[0124] Регулирующая часть 4 имеет первый-третий регулирующие элементы в контакте с проволокой W во множестве частей, в настоящем примере, по меньшей мере, в трех местах в направлении подачи проволоки W, подаваемой посредством блока 3 подачи, за счет этого загибая проволоку W вдоль тракта Wf подачи проволоки W, показанного с помощью пунктирной линии на фиг.21.
[0125] Первый регулирующий элемент регулирующей части 4 сконструирован посредством части 60 с неподвижным лезвием. Регулирующая часть 4 также имеет регулирующий элемент 42 в качестве второго регулирующего элемента, предоставленного ниже части 60 с неподвижным лезвием относительно подачи проволоки W в прямом направлении, обозначаемом с помощью стрелки F, и регулирующий элемент 43 в качестве третьего регулирующего элемента, предоставленного ниже регулирующего элемента 42. Регулирующий элемент 42 и регулирующий элемент 43 сконструированы посредством цилиндрического элемента, и проволока W находится в контакте с их внешними периферийными поверхностями.
[0126] В регулирующей части 4, часть 60 с неподвижным лезвием, регулирующий элемент 42 и регулирующий элемент 43 размещаются на кривой в соответствии со спиральным трактом Wf подачи проволоки W. Отверстие 60a части 60 с неподвижным лезвием, через которую проходит проволока W, предусмотрено на тракте Wf подачи проволоки W. Регулирующий элемент 42 предусмотрен на диаметрально внутренней стороне относительно тракта Wf подачи проволоки W. Регулирующий элемент 43 предусмотрен на диаметрально внешней стороне относительно тракта Wf подачи проволоки W.
[0127] В силу этого, проволока W, подаваемая посредством блока 3 подачи, проходит в контакте с частью 60 с неподвижным лезвием, регулирующим элементом 42 и регулирующим элементом 43 таким образом, что проволока W загибается, так что она идет по тракту Wf подачи проволоки W.
[0128] Регулирующая часть 4 имеет трансмиссионный механизм 44, выполненный с возможностью передавать движение блока 8 привода в регулирующий элемент 42. В операциях подачи проволоки W в прямом направлении посредством блока 3 подачи и загибания проволоки W, регулирующий элемент 42 выполнен с возможностью перемещаться в позицию, в которой он контактирует с помощью проволоки W, и в операциях подачи проволоки W в обратном направлении и наматывания проволоки W на арматурные стержни S, регулирующий элемент 42 выполнен с возможностью перемещаться в позицию, в которой он не контактирует с помощью проволоки W.
[0129] Фиг.22A и 22B являются видами сбоку, иллюстрирующими пример направляющей части, фиг.23 является видом в перспективе, иллюстрирующим пример направляющей части и контактного элемента, и фиг.24A и 24B являются видами сбоку, иллюстрирующими пример контактного элемента. Ниже описываются конфигурация для приведения в действие пары направляющих и функциональные преимущества.
[0130] Направляющая часть 5B имеет первую направляющую 51B содержащую регулирующий элемент 43 регулирующей части 4, и выполненную с возможностью направлять проволоку W, и вторую направляющую 52, выполненную с возможностью направлять проволоку W, загибаемую посредством регулирующей части 4 и первой направляющей 51B, в скручивающий блок 7.
[0131] Первая направляющая 51B присоединяется к концевому участку на передней стороне второй части 302 корпуса и проходит в первом направлении, обозначаемом с помощью стрелки A1. Как показано на фиг.21, первая направляющая 51B имеет участок 51h паза, имеющий направляющую поверхность 51g, с которой находится в скользящем контакте проволока W, подаваемая посредством блока 3 подачи. Что касается первой направляющей 51B, когда сторона, присоединенная ко второй части 302 корпуса, называется "базовой концевой стороной", и сторона, протягивающаяся в первом направлении из второй части 302 корпуса, называется "концевой стороной верхушки", регулирующий элемент 42 предусмотрен в базовой концевой стороне первой направляющей 51B, и регулирующий элемент 43 предусмотрен в концевой стороне верхушки первой направляющей 51B. Базовая концевая сторона первой направляющей 51B прикрепляется к металлической части для второй части 302 корпуса посредством винта и т.п. При использовании в данном документе, закрепление не означает закрепление в строгом смысле, но включает в себя незначительное перемещение. Зазор, через который может проходить проволока W, формируется между направляющей поверхностью 51g первой направляющей 51B и внешней периферийной поверхностью регулирующего элемента 42. Часть внешней периферийной поверхности регулирующего элемента 43 выступает к направляющей поверхности 51g первой направляющей 51.
[0132] Вторая направляющая 52 присоединяется к концевому участку на передней стороне второй части 302 корпуса. Вторая направляющая 52 предусмотрена обращенной к первой направляющей 51B во втором направлении, ортогональном к первому направлению и обозначаемом с помощью стрелки A2. Первая направляющая 51B и вторая направляющая 52 разнесены на предварительно определенный интервал во втором направлении, и отверстие 53 для вставки/вытаскивания, в/из которого вставляются/вытаскиваются арматурные стержни S, формируется между первой направляющей 51B и второй направляющей 52, как показано на фиг.22A и 22B.
[0133] Направляющая часть 5B имеет индукционную часть 59, выполненную с возможностью направлять арматурные стержни S в отверстие 53 для вставки/вытаскивания. Индукционная часть 59 предусмотрена на концевой стороне верхушки первой направляющей 51B и содержит поверхность, вдоль которой интервал между первой направляющей 51B и второй направляющей 52 снижается от концевой стороны верхушки к базовой концевой стороне индукционной части 59. В частности, как показано на фиг.21, индукционная часть 59 сконструирована посредством наклонной поверхности, наклоненной относительно первого направления, обозначаемого с помощью стрелки A1, в направлении, в котором интервал между первой направляющей 51B и второй направляющей 52 снижается от конца P1 верхушки первой направляющей 51B к окрестности концевого участка P2 участка 51h паза на концевой стороне верхушки первой направляющей 51B.
[0134] Как показано на фиг.23, вторая направляющая 52 имеет пару боковых направляющих 52a, обращенных друг к другу в третьем направлении, обозначаемом с помощью стрелки A3, ортогональном к первому направлению и второму направлению. Что касается второй направляющей 52, когда сторона, присоединенная ко второй части 302 корпуса, называется "базовой концевой стороной", и сторона, протягивающаяся в первом направлении из второй части 302 корпуса, называется "концевой стороной верхушки", зазор между парой боковых направляющих 52a постепенно снижается от концевой стороны верхушки к базовой концевой стороне. В паре боковых направляющих 52a, базовые концевые стороны обращены друг к другу с зазором, через который может проходить проволока W.
[0135] Вторая направляющая 52 присоединяется ко второй части 302 корпуса с поддержкой на базовой концевой стороне посредством вала 52b. Осевая линия вала 52b обращена к третьему направлению. Вторая направляющая 52 может вращаться вокруг вала 52b в качестве опорной точки относительно второй части 302 корпуса. Вторая направляющая 52 может перемещаться в направлениях, в которых концевой участок 52c на концевой стороне верхушки приближается вплотную и отходит от концевого участка 51c первой направляющей 51B, обращенной ко второй направляющей 52 во втором направлении, обозначаемом с помощью стрелки A2. Концевой участок P2 участка 51h паза является открытым для доступа для концевого участка 51c первой направляющей 51B.
[0136] Вторая направляющая 52 выполнена с возможностью вращаться вокруг вала 52b в качестве опорной точки, за счет этого перемещаясь между первой позицией (см. сплошную линию на фиг.22A), в которой расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51B представляет собой первое расстояние L1, и второй позицией (см. штрихпунктирную линию с двумя точками на фиг.22A и сплошную линию на фиг.22B), в которой расстояние между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51B представляет собой второе расстояние L2, меньшее первого расстояния L1.
[0137] В состоянии, в котором вторая направляющая 52 расположена во второй позиции, концевой участок 52c второй направляющей 52 и концевой участок 51c первой направляющей 51B открываются между ними. В состоянии, в котором вторая направляющая 52 расположена в первой позиции, интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51B больше, так что арматурные стержни S могут проще вставляться в отверстие 53 для вставки/вытаскивания между первой направляющей 51B и второй направляющей 52.
[0138] В состоянии, в котором вторая направляющая 52 расположена во второй позиции, боковые направляющие 52a позиционируются на тракте Wf подачи проволоки W, показанном с помощью пунктирной линии на фиг.22A и 22B. В состоянии, в котором вторая направляющая 52 расположена в первой позиции, при условии, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51B больше, чем в случае, в котором вторая направляющая 52 расположена во второй позиции, боковые направляющие 52a могут позиционироваться на тракте Wf подачи проволоки W, или боковые направляющие 52a могут позиционироваться на более внешней стороне, чем тракт Wf подачи проволоки W, как показано с помощью сплошной линии на фиг.22A.
[0139] Вторая направляющая 52 поджимается в направлении перемещения к первой позиции посредством поджимающего элемента 54, такого как крутильная спиральная пружина и удерживается в первой позиции.
[0140] Машина 1B для обвязки арматурных стержней включает в себя контактный элемент 9A, выполненный с возможностью приводить в действие вторую направляющую 52 по мере того, как арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания между первой направляющей 51B и второй направляющей 52, входят в контакт к с ним. Машина 1B для обвязки арматурных стержней также включает в себя образующая крышку часть 11, выполненную с возможностью закрывать концевой участок на передней стороне второй части 302 корпуса.
[0141] Образующая крышку часть 11 присоединяется из концевого участка на передней стороне второй части 302 корпуса поверх левой и правой сторон второй части 302 корпуса в третьем направлении. Образующая крышку часть 11 сконструирована посредством металлической пластины и т.п. и имеет такую форму, что она закрывает участок или все из концевого участка на передней стороне второй части 302 корпуса и участков левой и правой сторон на передней стороне второй части 302 корпуса между базовой концевой стороной первой направляющей 51B и базовой концевой стороной второй направляющей 52. Тогда как вторая образующая корпус часть 302 изготовлена из смолы, образующая крышку часть 11 изготовлена из металла, так что даже когда контактный элемент 9A и арматурные стержни S входят в контакт с образующей крышку частью 11, изготовленной из металла, износ образующей крышку части 11 может уменьшаться.
[0142] Контактный элемент 9A представляет собой пример подвижной направляющей части, поддерживается с возможностью вращения посредством вала 90A и присоединяется ко второй части 302 корпуса через образующая крышку часть 11. Контактный элемент 9A имеет изогнутую форму и имеет контактные части 91A, предоставленные на одной стороне относительно вала 90A с возможностью входить в контакт с арматурными стержнями S, и соединительную часть 92A, предусмотренную на другой стороне относительно вала 90A и соединенную со второй направляющей 52. В частности, контактные части 91A предусмотрены на одной стороне относительно вала 90A во втором направлении, и соединительная часть 92A предусмотрена на другой стороне.
[0143] Контактный элемент 9A имеет вал 90A, предоставленный рядом с центром между первой направляющей 51B и второй направляющей 52. Контактный элемент 9A также имеет пару контактных частей 91A, предоставленных с интервалом, через который может проходить проволока W, обвязывающая арматурные стержни S, в третьем направлении, обозначаемом с помощью стрелки A3 из окрестности части, поддерживаемой посредством вала 90A, к стороне первой направляющей 51B. Контактные части 91A проходят в левую и правую стороны первой направляющей 51B.
[0144] Контактный элемент 9A также имеет соединительную часть 92A, предусмотренную из части, поддерживаемой посредством вала 90A, к стороне второй направляющей 52, и смещающая часть 93A в контакте с частью на противоположной стороне относительно стороны второй направляющей 52, обращенной к первой направляющей 51B, предусмотрена на концевой стороне верхушки соединительной части 92A.
[0145] Контактный элемент 9A выполнен с возможностью вращаться вокруг вала 90A в качестве опорной точки относительно второй части 302 корпуса, за счет этого перемещаясь между позицией готовности (фиг.24A), в которой контактные части 91A выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.24B), в которой контактные части 91A приближаются вплотную к образующей крышку части 11.
[0146] В состоянии, в котором контактный элемент 9A перемещается в позицию для приведения в действие, показанную на фиг.24B, контактный элемент 9A имеет такую форму, при которой контактные части 91A проходят из вала 90A к первой направляющей 51B вдоль второго направления, обозначаемого с помощью стрелки A2. Следовательно, вращение контактного элемента 9A вокруг вала 90A в качестве опорной точки заставляет контактные части 91A перемещаться в первом направлении, обозначаемом с помощью стрелки A1, вдоль дуги, центр которой представляет собой вал 90A. В ходе операции вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания между первой направляющей 51B и второй направляющей 52, машина 1B для обвязки арматурных стержней перемещается в первом направлении, обозначаемом с помощью стрелки A1. Вследствие относительного перемещения машины 1B для обвязки арматурных стержней и арматурных стержней S, контактные части 91A подталкиваются посредством силы вдоль первого направления, обозначаемого с помощью стрелки A1, так что контактный элемент 9A перемещается в позицию для приведения в действие. В силу этого, направление перемещения контактных частей 91A вследствие вращения вокруг вала 90A в качестве опорной точки определяется в качестве направления вдоль направления силы, посредством которой арматурные стержни S подталкивают контактные части 91A посредством относительного перемещения машины 1B для обвязки арматурных стержней и арматурных стержней S. Кроме того, в состоянии, в котором контактный элемент перемещается в позицию для приведения в действие, показанную на фиг.24B, контактный элемент 9A имеет такую форму, при которой соединительная часть 92A наклоняется вперед от вала 90A относительно контактных частей 91A и проходит ко второй направляющей 52. Следовательно, вращение контактного элемента 9A вокруг вала 90A в качестве опорной точки заставляет смещающую часть 93A перемещаться во втором направлении, обозначаемом с помощью стрелки A2, вдоль дуги, центр которой представляет собой вал 90A. В силу этого, в состоянии, в котором контактный элемент 9A поджимается посредством поджимающего элемента 54, и вторая направляющая 52 за счет этого располагается в первой позиции, смещающая часть 93A подталкивается в направлении от первой направляющей 51B посредством второй направляющей 52. По этой причине, контактный элемент 9A перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки таким образом, что контактные части 91A выступают из образующей крышку части 11. Следует отметить, что в настоящем примере, контактный элемент 9A выполнен с возможностью перемещаться посредством силы поджимающего элемента 54 для поджимания второй направляющей 52. Тем не менее, также может предоставляться другой поджимающий элемент для поджимания контактного элемента 9A.
[0147] Когда контактные части 91A прижимаются к арматурным стержням S, контактные части 91A контактного элемента 9A перемещаются в первом направлении. В силу этого, контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки и перемещается в позицию для приведения в действие. Когда контактный элемент 9A перемещается в позицию для приведения в действие, смещающая часть 93A перемещается к первой направляющей 51B посредством вращения соединительной части 92A вокруг вала 90A в качестве опорной точки. В силу этого, смещающая часть 93A подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91A и перемещение смещающей части 93A вследствие контакта арматурных стержней S с контактной частью 91A заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0148] Машина 1B для обвязки арматурных стержней включает в себя первый блок 12A вывода, имеющий аналогичную конфигурацию с конфигурацией, описанной со ссылкой на фиг.7, и выполненный с возможностью обнаруживать то, что вторая направляющая 52 перемещается во вторую позицию. Следует отметить, что может предоставляться первый блок 14A вывода, имеющий конфигурацию, эквивалентную конфигурации, описанной со ссылкой на фиг.12A и 12B, и выполненный с возможностью обнаруживать то, что вторая направляющая 52 перемещается во вторую позицию посредством бесконтактного датчика.
[0149] В дальнейшем описываются скручивающий блок 7 и блок 8 привода со ссылкой на каждый чертеж. Скручивающий блок 7 включает в себя зацепляющую часть 70, с которой зацепляется проволока W, и приводную часть 71, выполненную с возможностью приводить в действие зацепляющую часть 70. Зацепляющая часть 70 выполнена с возможностью вращаться посредством операции приводной части 71, за счет этого скручивая проволоку W, намотанную на арматурные стержни S.
[0150] Блок 8 привода включает в себя скручивающий электромотор 80, выполненный с возможностью приводить в действие скручивающий блок 7 и т.п., редуктор 81, выполненный с возможностью выполнять замедление и усиление крутящего момента, вращательный вал 82, выполненный с возможностью приводиться в действие и вращаться через редуктор 81 посредством скручивающего электромотора 80, и подвижный элемент 83, выполненный с возможностью передавать движущую силу в режущий блок 6 и регулирующий элемент 42. Скручивающий блок 7 и блок 8 привода размещаются таким образом, что центры вращения вращательного вала 82, приводной части 71 и зацепляющей части 70 находятся на идентичной оси. Центры вращения вращательного вала 82, приводной части 71 и зацепляющей части 70 называются "осевой линией Ax".
[0151] Зацепляющая часть 70 формируется с первым каналом, через который проходит проволока W, подаваемая в режущий блок 6 посредством блока 3 подачи, и вторым каналом, через который проходит проволока W, загибаемая посредством регулирующей части 4 и направляемая в скручивающий блок 7 посредством направляющей части 5.
[0152] Блок 8 привода выполнен с возможностью перемещать приводную часть 71 вдоль осевого направления вращательного вала 82 посредством операции вращения вращательного вала 82. Приводная часть 71 перемещается вдоль осевого направления вращательного вала 82 таким образом, что зацепляющая часть 70 удерживает концевую сторону верхушки проволоки W, направляемой в скручивающий блок 7 посредством направляющей части 5.
[0153] В блоке 8 привода, подвижный элемент 83 выполнен с возможностью перемещаться вдоль осевого направления вращательного вала 82 в сочетании с операцией перемещения приводной части 71 вдоль осевого направления вращательного вала 82 таким образом, что движение подвижного элемента 83 передается в регулирующий элемент 42 посредством трансмиссионного механизма 44, и регулирующий элемент 42 за счет этого перемещается в позицию, в которой он не контактирует с помощью проволоки. Помимо этого, приводная часть 71 выполнена с возможностью перемещаться вдоль осевого направления вращательного вала 82 таким образом, что движение подвижного элемента 83 передается в часть 61 с подвижным лезвием посредством трансмиссионного механизма 62, и часть 61 с подвижным лезвием за счет этого приводится в действие для того, чтобы отрезать проволоку W.
[0154] Блок 8 привода выполнен с возможностью вращать приводную часть 71, перемещаемую вдоль осевого направления вращательного вала 82 посредством операции вращения вращательного вала 82. Приводная часть 71 выполнена с возможностью вращаться вокруг оси вращательного вала 82, за счет этого скручивая проволоку W посредством зацепляющей части 70.
[0155] Фиг.8 является функциональной блок-схемой машины для обвязки арматурных стержней по второму варианту осуществления. В машине 1B для обвязки арматурных стержней, блок 100B управления выполнен с возможностью обнаруживать выводы первого блока 12A вывода, выполненного с возможностью приводиться в действие по мере того, как контактный элемент 9A прижимается к арматурным стержням S, и второго блока 15 вывода, выполненного с возможностью приводиться в действие по мере того, как курок 10t нажимается. Блок 100B управления выполнен с возможностью управлять подающим электромотором 31, выполненным с возможностью приводить в действие подающие шестерни 30, и скручивающим электромотором 80, выполненным с возможностью приводить в действие скручивающий блок 7 и т.п., в ответ на выводы первого блока 12A вывода и второго блока 15 вывода, за счет этого выполняя последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0156] В дальнейшем описываются операции обвязки арматурных стержней S с помощью проволоки W посредством машины 1B для обвязки арматурных стержней. Рабочий захватывает части 304h в виде рукоятки машины 1B для обвязки арматурных стержней обеими руками. Таким образом, рабочий захватывает захватную часть 304R части 304h в виде рукоятки правой рукой и захватывает захватную часть 304L части 304h в виде рукоятки левой рукой.
[0157] Когда рабочая часть 304t захватывается вместе с захватной частью 304R рабочим, рабочая часть 304t вращается относительно захватной части 304R и за счет этого приводится в действие. Когда рабочая часть 304t приводится в действие, вывод второго блока 15 вывода становится включенным, и блок 100B управления обнаруживает то, что вывод второго блока 15 вывода становится включенным.
[0158] Рабочий захватывает части 304h в виде рукоятки машины 1B для обвязки арматурных стержней обеими руками, совмещает позицию направляющей части 5B с точкой пересечения двух арматурных стержней S и вставляет арматурные стержни S в отверстие 53 для вставки/вытаскивания.
[0159] Чтобы обвязывать арматурные стержни S на уровне ног рабочего, машина 1B для обвязки арматурных стержней используется с направляющей частью 5B, обращенной вниз в состоянии, в котором рабочий стоит. В состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, интервал отверстия 53 для вставки/вытаскивания во втором направлении, обозначаемом с помощью стрелки A2, является более узким, по сравнению с состоянием, в котором вторая направляющая 52 перемещается в первую позицию. По этой причине, при вставке арматурных стержней S, затруднительно вставлять арматурные стержни S в отверстие 53 для вставки/вытаскивания в обвязочной машине предшествующего уровня техники, в которой вторая направляющая 52 перемещена во вторую позицию. Следовательно, согласно машине 1B для обвязки арматурных стержней, в состоянии, в котором арматурные стержни S не вставляются в отверстие 53 для вставки/вытаскивания, как показано на фиг.24A, вторая направляющая 52 перемещается в первую позицию таким образом, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51A увеличивается. Помимо этого, согласно машине 1B для обвязки арматурных стержней, концевая сторона верхушки первой направляющей 51B содержит индукционную часть 59, имеющую форму, допускающую направление арматурных стержней S в отверстие 53 для вставки/вытаскивания. В силу этого, поскольку рабочий может заставлять арматурные стержни S пристыковываться к индукционной части 59, а индукционную часть 59 скользить по арматурным стержням S, проще вставлять арматурные стержни S в отверстие 53 для вставки/вытаскивания.
[0160] Рабочий прижимает арматурные стержни S к контактным частям 91A контактного элемента 9A посредством операции перемещения машины 1B для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания.
[0161] Вследствие операции перемещения машины 1B для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, к контактному элементу 9A прикладывается сила вдоль направления перемещения машины 1B для обвязки арматурных стержней таким образом, что контактные части 91A подталкиваются. В силу этого, контактные части 91A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки, за счет этого перемещаясь в позицию для приведения в действие, как показано на фиг.24B.
[0162] Когда два пересекающихся арматурных стержня S вставляются в отверстие 53 для вставки/вытаскивания, один арматурный стержень S расположен в одной боковой части первой направляющей 51B, и другой арматурный стержень S расположен в другой боковой части первой направляющей 51B. Напротив, пара контактных частей 91A контактного элемента 9A проходит из места между первой направляющей 51B и второй направляющей 52 к левой и правой сторонам первой направляющей 51B. В силу этого, арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания, надежно входят в контакт с контактными частями 91A таким образом, что контактный элемент 9A может перемещаться в позицию для приведения в действие. Помимо этого, контактные части 91A контактного элемента 9A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, посредством операции вращения вокруг вала 90A в качестве опорной точки. В силу этого, контактные части 91A могут подталкиваться посредством операции перемещения машины 1B для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, и необязательно перемещать машину 1B для обвязки арматурных стержней в другом направлении таким образом, чтобы приводить в действие контактный элемент 9A.
[0163] Когда контактный элемент 9A перемещается в позицию для приведения в действие, вращение соединительной части 92A вокруг вала 90A в качестве опорной точки заставляет смещающую часть 93A подталкивать вторую направляющую 52 к первой направляющей 51B таким образом, что вторая направляющая 52 перемещается во вторую позицию.
[0164] Когда вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода становится включенным, и блок 100B управления обнаруживает то, что вывод первого блока 12A вывода становится включенным.
[0165] Когда обнаруживается то, что вывод первого блока 12A вывода становится включенным, в состоянии, в котором обнаруживается то, что вывод второго блока 15 вывода, блок 100B управления управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Альтернативно, когда захватная часть 304R захватывается рабочим таким образом, что рабочая часть 304t приводится в действие, и вывод второго блока 15 вывода становится включенным, в состоянии, в котором операция прижатия арматурных стержней S к контактным частям 91A контактного элемента 9A выполняется, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Следует отметить, что рабочая часть 304t и второй блок 15 вывода могут не предоставляться, и когда операция прижатия арматурных стержней S к контактным частям 91A контактного элемента 9A выполняется, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0166] Далее описывается пример последовательности операций обвязки арматурных стержней S с помощью проволоки W. Подающий электромотор 31 вращается в прямом направлении, и подающие шестерни 30 за счет этого вращаются в прямом направлении таким образом, что проволока W подается в прямом направлении, обозначаемом с помощью стрелки F. Проволока W, подаваемая в прямом направлении посредством блока 3 подачи, проходит через часть 60 с неподвижным лезвием, которая представляет собой первый регулирующий элемент, составляющий регулирующую часть 4, и регулирующий элемент 42, который представляет собой второй регулирующий элемент. Проволока W, проходящая через регулирующий элемент 42, входит в контакт с направляющей поверхностью 51g первой направляющей 51B, и в силу этого направляется в регулирующий элемент 43, который представляет собой третий регулирующий элемент.
[0167] В силу этого, проволока W, подаваемая в прямом направлении посредством блока 3 подачи, входит в контакт с частью 60 с неподвижным лезвием, регулирующим элементом 42, регулирующим элементом 43 и направляющей поверхностью 51g первой направляющей 51B и в силу этого изгибается в дугообразную форму. Затем проволока W, подаваемая в прямом направлении посредством блока 3 подачи, входит в контакт с частью 60 с неподвижным лезвием и регулирующим элементом 43 из внешнего периферийного направления дугообразной формы и входит в контакт с регулирующим элементом 42 между частью 60 с неподвижным лезвием и регулирующим элементом 43 из внутреннего периферийного направления дугообразной формы таким образом, что практически круглый загиб формируется.
[0168] Концевой участок 51c первой направляющей 51B и концевой участок 52c второй направляющей 52 разнесены на предварительно определенный интервал в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию. Тем не менее, в состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, пара боковых направляющих 52a позиционируется на тракте Wf подачи проволоки W, и проволока W, подаваемая в прямом направлении посредством блока 3 подачи, загибается посредством регулирующей части 4, как описано выше, так что проволока направляется между парой боковых направляющих 52a второй направляющей 52.
[0169] Проволока W, направляемая между парой боковых направляющих 52a второй направляющей 52, подается в прямом направлении посредством блока 3 подачи таким образом, что проволока направляется в зацепляющую часть 70 скручивающего блока 7 посредством пары боковых направляющих 52a второй направляющей 52. После этого, когда определяется то, что концевой участок верхушки проволоки W подается в предварительно определенную позицию, блок 100B управления прекращает приведение в действие подающего электромотора 31. В силу этого, проволока W спирально наматывается вокруг арматурных стержней S. Следует отметить, что в состоянии, в котором вторая направляющая 52 не перемещается во вторую позицию, и вывод первого блока 12A вывода выключен, блок 100B управления не выполняет подачу проволоки W. В силу этого, проволока W не зацепляется с зацепляющей частью 70 скручивающего блока 7, и подавляется возникновение плохой подачи. Таким образом, когда вторая направляющая 52 расположена во второй позиции, проволока W может направляться в зацепляющую часть 70 скручивающего блока 7.
[0170] После прекращения подачи проволоки W в прямом направлении, блок 100B управления вращает электромотор 80 в прямом направлении. Скручивающий электромотор 80 вращается в прямом направлении таким образом, что зацепляющая часть 70 приводится в действие посредством приводной части 71, и концевая сторона верхушки проволоки W удерживается посредством зацепляющей части 70.
[0171] Когда определяется то, что скручивающий электромотор 80 вращается до тех пор, пока проволока W не удерживается посредством зацепляющей части 70, блок 100B управления прекращает вращение скручивающего электромотора 80 и вращает подающий электромотор 31 в обратном направлении. Когда скручивающий электромотор 80 вращается до тех пор, пока проволока W не удерживается посредством зацепляющей части 70, движение подвижного элемента 83 передается в регулирующий элемент 42 посредством трансмиссионного механизма 44 таким образом, что регулирующий элемент 42 перемещается в позицию, в которой он не входит в контакт с помощью проволоки.
[0172] Когда подающий электромотор 31 вращается в обратном направлении, подающие шестерни 30 вращаются в обратном направлении таким образом, что проволока W подается в обратном направлении, обозначаемом с помощью стрелки R. Посредством операции подачи проволоки W в обратном направлении, проволока W наматывается в тесном контакте с арматурными стержнями S.
[0173] Когда определяется то, что подающий электромотор 31 вращается в обратном направлении до тех пор, пока проволока W не наматывается на арматурные стержни S, блок 100B управления прекращает вращение подающего электромотора 31 и затем вращает скручивающий электромотор 80 в прямом направлении. Скручивающий электромотор 80 вращается в прямом направлении таким образом, что часть 61 с подвижным лезвием приводится в действие через трансмиссионный механизм 62 посредством подвижного элемента 83, и проволока W в силу этого отрезается.
[0174] После того, как проволока W отрезается, скручивающий электромотор 80 непрерывно вращается в прямом направлении, за счет этого вращая зацепляющую часть 70 с возможностью скручивать проволоку W.
[0175] Когда определяется то, что скручивающий электромотор 80 вращается в прямом направлении до тех пор, пока проволока W не скручивается, блок 100B управления вращает скручивающий электромотор 80 в обратном направлении. Скручивающий электромотор 80 вращается в обратном направлении таким образом, что зацепляющая часть 70 возвращается в начальную позицию, и удерживаемое состояние проволоки W в силу этого прекращается. В силу этого, проволока W, обвязывающая арматурные стержни S, может вытаскиваться из зацепляющей части 70.
[0176] Когда определяется то, что скручивающий электромотор 80 вращается в обратном направлении до тех пор, пока зацепляющая часть 70 и т.п. не возвращается в начальную позицию, блок 100B управления прекращает вращение скручивающего электромотора 80.
[0177] Рабочий перемещает машину 1B для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S, обвязанных с помощью проволоки W, из отверстия 53 для вставки/вытаскивания. Когда сила подталкивания контактных частей 91A контактного элемента 9A не прикладывается посредством операции перемещения машины 1B для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S из отверстия 53 для вставки/вытаскивания, вторая направляющая 52 перемещается из второй позиции в первую позицию посредством силы поджимающего элемента 54.
[0178] Когда вторая направляющая 52 перемещается в первую позицию, контактный элемент 9A подталкивается в направлении, в котором смещающая часть 93A отходит от первой направляющей 51B и перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки таким образом, что контактные части 91A выступают из образующей крышку части 11.
[0179] Операция рабочего для перемещения машины 1B для обвязки арматурных стержней в направлении вытаскивания арматурных стержней S, обвязанных с помощью проволоки W, из отверстия 53 для вставки/вытаскивания заставляет вторую направляющую 52 перемещаться в первую позицию таким образом, что интервал между концевым участком 52c второй направляющей 52 и концевым участком 51c первой направляющей 51 увеличивается. В силу этого, арматурные стержни S могут проще вытаскиваться из отверстия 53 для вставки/вытаскивания и могут проще перемещаться в следующее место для обвязки.
[0180] Фиг.26A и 26B являются видами сбоку, иллюстрирующими модифицированный вариант осуществления подвижной направляющей части. В подвижной направляющей части по модифицированному варианту осуществления, контактный элемент 9B, с которым входят в контакт арматурные стержни S, и соединительная часть 92B, соединенная со второй направляющей 52, сконструированы посредством отдельных компонентов, вместо конструирования как единое целое. Контактный элемент 9B также выполнен с возможностью линейно перемещаться.
[0181] Контактный элемент 9B присоединяется к боковой части для второй части 302 корпуса с поддержкой посредством множества валов 94B. Контактный элемент 9B имеет форму, протягивающуюся в первом направлении, обозначаемом с помощью стрелки A1, концевой участок верхушки в первом направлении содержит контактные части 91B, обращенные к отверстию 53 для вставки/вытаскивания, и часть на одной стороне во втором направлении, обозначаемом с помощью стрелки A2, содержит приводную часть 95B для приведения в действие соединительной части 92B. Приводная часть 95B сконструирована посредством скошенной поверхности, имеющей неровность в первом направлении.
[0182] Контактный элемент 9B имеет продолговатые отверстия 96B в первом направлении, обозначаемом с помощью стрелки A1, и валы 94B вставляются в продолговатые отверстия 96B. В силу этого, контактный элемент 9B может перемещаться в первом направлении, обозначаемом с помощью стрелки A1, относительно второй части 302 корпуса, и выполнен с возможностью перемещаться между позицией готовности (фиг.26A), в которой контактные части 91B выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.26B), в которой контактные части 91B приближаются вплотную к образующей крышку части 11.
[0183] Контактный элемент 9B поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности.
[0184] Соединительная часть 92B присоединяется к образующей крышку части 11 с поддержкой посредством вала 90B. Соединительная часть 92B содержит приводимую часть 97B, которая может входить в контакт с возможностью скольжения с приводной частью 95B контактного элемента 9B, на одной стороне с размещением вала 90B между ними, и содержит смещающую часть 93B, которая находится в контакте с частью на противоположной стороне относительно стороны второй направляющей 52, обращенной к первой направляющей 51B, на другой стороне, с размещением вала 90B между ними.
[0185] В состоянии, в котором арматурные стержни S не находятся в контакте с контактными частями 91B контактного элемента 9B, контактный элемент 9B поджимается в направлении, в котором контактные части 91B выступают из образующей крышку части 11, посредством поджимающего элемента (не показан), отдельного от поджимающего элемента 54 для поджимания второй направляющей 52, за счет этого перемещаясь в позицию готовности, показанную на фиг.26A. Когда контактный элемент 9B перемещается в позицию готовности, соединительная часть 92B может вращаться вокруг вала 90B в качестве опорной точки в направлении, в котором приводимая часть 97B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B отходит от первой направляющей 51B. В силу этого, вторая направляющая 52 поджимается посредством поджимающего элемента 54 и перемещается в первую позицию. Позиция второй направляющей 52 обнаруживается посредством первого блока 12A вывода, описанного со ссылкой на фиг.7, и вывод первого блока 12A вывода становится выключенным в состоянии, в котором вторая направляющая 52 перемещается в первую позицию.
[0186] Когда арматурные стержни S прижимаются к контактным частям 91B, контактный элемент 9B перемещается в позицию для приведения в действие вдоль первого направления, обозначаемого с помощью стрелки A1. Когда контактный элемент 9B перемещается в позицию для приведения в действие, приводимая часть 97B соединительной части 92B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B перемещается к первой направляющей 51B посредством вращения соединительной части 92B вокруг вала 90B в качестве опорной точки. В силу этого, смещающая часть 93B подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. В состоянии, в котором вторая направляющая 52 перемещается во вторую позицию, вывод первого блока 12A вывода становится включенным. Позиция второй направляющей 52 также может обнаруживаться посредством первого блока 12B вывода, описанного со ссылкой на фиг.12A и 12B.
Таким образом, контакт арматурных стержней S с контактными частями 91B и перемещение смещающей части 93B вследствие контакта арматурных стержней S с контактными частями 91B заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0187] Когда контактный элемент 9B перемещается в позицию для приведения в действие таким образом, что вторая направляющая 52 перемещается вторая позиция, и обнаруживается то, что вывод первого блока 12A вывода становится включенным, в состоянии, в котором рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, блок 100B управления, показанный на фиг.25, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, в состоянии, в котором арматурные стержни S прижимаются к контактным частям 91B контактного элемента 9B, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок 100B управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Следует отметить, что рабочая часть 304t и второй блок 15 вывода могут не предоставляться, и когда арматурные стержни S прижимаются к контактным частям 91B контактного элемента 9B, и в силу этого обнаруживается то, что вывод первого блока 12A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0188] Контактный элемент 9B содержит продолговатые отверстия 96B в первом направлении, обозначаемом с помощью стрелки A1, и валы 94B вставляются в продолговатое отверстие 96B таким образом, что контактный элемент 9B линейно перемещается в первом направлении. В ходе операции вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания между первой направляющей 51B и второй направляющей 52, машина 1B для обвязки арматурных стержней перемещается в первом направлении, обозначаемом с помощью стрелки A1. Вследствие относительного перемещения машины 1B для обвязки арматурных стержней и арматурных стержней S, контактные части 91B контактного элемента 9B подталкиваются посредством силы вдоль первого направления, обозначаемого с помощью стрелки A1. В силу этого, направление перемещения контактного элемента 9B становится направлением вдоль направления силы, посредством которой арматурные стержни S подталкивают контактные части 91B посредством относительного перемещения машины 1B для обвязки арматурных стержней и арматурных стержней S. Напротив, контактный элемент 9B и соединительная часть 92B сконструированы посредством отдельных компонентов таким образом, что соединительная часть 92B может перемещать вторую направляющую 52 посредством вращения вокруг вала 90B в качестве опорной точки. В силу этого, можно оптимизировать направление перемещения контактного элемента 9B, который подталкивается и приводится в действие посредством арматурных стержней S, и направление перемещения соединительной части 92B для перемещения второй направляющей 52, соответственно.
[0189] Фиг.27A, 27B, 28A и 28B являются видами сбоку, иллюстрирующими модифицированные варианты осуществления блока вывода, выполненного с возможностью обнаруживать контактный элемент. На фиг.27A, 27B, 28A и 28B, когда обнаруживается то, что контактный элемент перемещается в позицию для приведения в действие, определяется то, что вторая направляющая 52 перемещается во вторую позицию.
[0190] Как описано со ссылкой на фиг.24A и 24B, фиг.27A и 27B иллюстрируют конфигурацию, в которой вторая направляющая 52 перемещается в первую позицию и вторую позицию посредством операции вращения вокруг вала 52b в качестве опорной точки, и вторая направляющая 52 поджимается в направлении перемещения из второй позиции в первую позицию посредством поджимающего элемента (не показан) и удерживается в первой позиции. В этой конфигурации, предусмотрен первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент перемещается в позицию для приведения в действие. Следует отметить, что в настоящем примере, контактный элемент 9A перемещается посредством силы поджимающего элемента (не показан) для поджимания второй направляющей 52. Тем не менее, может предоставляться другой поджимающий элемент для поджимания контактного элемента 9A.
[0191] Первый блок 14A вывода может иметь аналогичную конфигурацию с первым блоком 12A вывода, описанным со ссылкой на фиг.7. Например, его вывод изменяется посредством смещения перемещаемого элемента 140. В настоящем примере, как показано на фиг.27A, когда контактный элемент 9A перемещается в позицию готовности, контактные части 91A контактного элемента 9A перемещаются в направлении от перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, как показано на фиг.27B, когда контактный элемент 9A перемещается в позицию для приведения в действие, контактные части 91A контактного элемента 9A перемещаются в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9A перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0192] Как показано на фиг.27A в состоянии, в котором вторая направляющая 52 расположена в первой позиции, контактный элемент 9A подталкивается в направлении, в котором смещающая часть 93A отходит от первой направляющей 51, и перемещается в позицию готовности посредством вращения вокруг вала 90A в качестве опорной точки. В состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода становится выключенным.
[0193] Когда контактные части 91A прижимаются к арматурным стержням S, контактные части 91A перемещаются в первом направлении, обозначаемом с помощью стрелки A1, так что контактный элемент 9A вращается вокруг вала 90A в качестве опорной точки и перемещается в позицию для приведения в действие, как показано на фиг.27B. В состоянии, в котором контактный элемент 9A перемещается в позицию готовности, вывод первого блока 14A вывода становится включенным. Помимо этого, когда контактный элемент 9A перемещается в позицию для приведения в действие, смещающая часть 93A перемещается к первой направляющей 51B посредством вращения соединительной части 92A вокруг вала 90A в качестве опорной точки. В силу этого, смещающая часть 93A подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Следовательно, обнаруживается то, что контактный элемент 9A перемещается в позицию для приведения в действие таким образом, что может определяться то, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91A и перемещение смещающей части 93A вследствие контакта арматурных стержней S с контактной частью 91A заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0194] Когда контактный элемент 9A перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, блок 100B управления, показанный на фиг.25, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, в состоянии, в котором арматурные стержни S прижимаются к контактным частям 91A контактного элемента 9A, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100B управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Следует отметить, что рабочая часть 304t и второй блок 15 вывода могут не предоставляться, и когда арматурные стержни S прижимаются к контактным частям 91A контактного элемента 9A, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0195] Как описано со ссылкой на фиг.26A и 26B, фиг.28A и 28B иллюстрируют конфигурацию, в которой контактный элемент 9B, с которым входят в контакт арматурные стержни S, и соединительная часть 92B, соединенная со второй направляющей 52, сконструированы посредством отдельных компонентов, вместо конструирования как единое целое, и контактный элемент 9B линейно перемещается. В этих конфигурациях, предусмотрен первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент 9B перемещается в позицию для приведения в действие.
[0196] Как показано на фиг.28A, когда контактный элемент 9B перемещается в позицию готовности, контактный элемент 9B перемещается в направлении от перемещаемого элемента 140 первого блока 14A вывода. Таким образом, в состоянии, в котором контактный элемент 9B перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, как показано на фиг.28B, когда контактный элемент 9B перемещается в позицию для приведения в действие, контактный элемент 9B перемещается в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0197] В состоянии, в котором арматурные стержни S не входят в контакт с контактными частями 91B контактного элемента 9B, контактный элемент 9B поджимается в направлении, в котором контактные части 91B выступают из образующей крышку части 11 посредством поджимающего элемента (не показан), и в силу этого перемещается в позицию готовности, показанную на фиг.28A. В состоянии, в котором контактный элемент 9B перемещается в позицию готовности, вывод первого блока 14A вывода становится выключенным. Помимо этого, когда контактный элемент 9B перемещается в позицию готовности, соединительная часть 92B может вращаться вокруг вала 90B в качестве опорной точки в направлении, в котором приводимая часть 97B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B отходит от первой направляющей 51. В силу этого, вторая направляющая 52 поджимается посредством другого поджимающего элемента (не показан) и перемещается в первую позицию.
[0198] Когда арматурные стержни S прижимаются к контактным частям 91B, контактный элемент 9B перемещается в позицию для приведения в действие вдоль первого направления, обозначаемого с помощью стрелки A1, как показано на фиг.28B. В состоянии, в котором контактный элемент 9B перемещается в позицию для приведения в действие, вывод первого блока 14A вывода становится включенным. Помимо этого, когда контактный элемент 9B перемещается в позицию для приведения в действие, приводимая часть 97B соединительной части 92B перемещается согласно неровной форме приводной части 95B контактного элемента 9B, и смещающая часть 93B перемещается к первой направляющей 51B посредством вращения соединительной части 92B вокруг вала 90B в качестве опорной точки. В силу этого, смещающая часть 93B подталкивает вторую направляющую 52 таким образом, что вторая направляющая 52 перемещается во вторую позицию. Следовательно, обнаруживается то, что контактный элемент 9B перемещается в позицию для приведения в действие таким образом, что может определяться то, что вторая направляющая 52 перемещается во вторую позицию. Таким образом, контакт арматурных стержней S с контактными частями 91B и перемещение смещающей части 93B вследствие контакта арматурных стержней S с контактными частями 91B заставляет вторую направляющую 52 перемещаться из первой позиции во вторую позицию.
[0199] Когда контактный элемент 9A перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, блок 100B управления, показанный на фиг.25, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, в состоянии, в котором арматурные стержни S прижимаются к контактным частям 91B контактного элемента 9B, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100B управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Следует отметить, что рабочая часть 304t и второй блок 15 вывода могут не предоставляться, и когда арматурные стержни S прижимаются к контактным частям 91B контактного элемента 9B, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0200] Пример машины для обвязки арматурных стержней по третьему варианту осуществления
Фиг.29 является функциональной блок-схемой машины для обвязки арматурных стержней по третьему варианту осуществления. Машина 1C для обвязки арматурных стержней включает в себя блок 101 обнаружения, выполненный с возможностью обнаруживать арматурные стержни S. Блок 101 обнаружения сконструирован посредством контактного датчика, такого как пьезоэлектрический элемент, бесконтактного датчика, такого как датчик изображений и т.п., и выполнен с возможностью обнаруживать то, что арматурные стержни S вставляются в отверстие 53 для вставки/вытаскивания между первой направляющей 51 или первой направляющей 51B и второй направляющей 52, показанной на фиг.1, и т.п.
[0201] Когда из вывода блока 101 обнаружения обнаруживается то, что арматурные стержни S вставляются в отверстие 53 для вставки/вытаскивания, блок 100C управления управляет электромотором 102 для открытия/закрытия направляющих таким образом, чтобы перемещать вторую направляющую 52 из первой позиции во вторую позицию.
[0202] Следует отметить, что когда обнаруживается то, что вторая направляющая 52 перемещается во вторую позицию, блок 100C управления управляет подающим электромотором 31, выполненным с возможностью приводить в действие подающие шестерни 30, и скручивающим электромотором 80, выполненным с возможностью приводить в действие скручивающий блок 7 и т.п., так чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0203] Пример машины для обвязки арматурных стержней по четвертому варианту осуществления
Фиг.30A, 30B, 31A, 31B, 32A и 32B являются видами сбоку, иллюстрирующими основные части машины для обвязки арматурных стержней по четвертому варианту осуществления.
[0204] Машина для обвязки арматурных стержней по четвертому варианту осуществления имеет конфигурацию, в которой контактный элемент и вторая направляющая не работают в ассоциации друг с другом. Машина 1D для обвязки арматурных стержней, показанная на фиг.30A и 30B, включает в себя направляющую часть 5, выполненную с возможностью направлять проволоку. Направляющая часть 5 имеет первую направляющую 51 и вторую направляющую 52. Первая направляющая 51 и вторая направляющая 52 присоединяются к концевому участку на передней стороне образующей корпус части 10 и проходят в первом направлении, обозначаемом с помощью стрелки A1. Вторая направляющая 52 предусмотрена обращенной к первой направляющей 51 во втором направлении, ортогональном к первому направлению и обозначаемом с помощью стрелки A2. Вторая направляющая 52 может быть выполнена с возможностью перемещаться в направлении к и от первой направляющей 51 посредством вращения вокруг вала (не показан) в качестве опорной точки.
[0205] Машина 1D для обвязки арматурных стержней включает в себя контактный элемент 9D, с которым входят в контакт арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания между первой направляющей 51 и второй направляющей 52. Контактный элемент 9D поддерживается с возможностью вращения посредством вала 90D и присоединяется к образующей корпус части 10 через образующая крышку часть 11. Контактный элемент 9D содержит контактные части 91D, предоставленные на одной стороне относительно вала 90D с возможностью входить в контакт с арматурными стержнями S. Контактные части 91D контактного элемента 9D проходят из вала 90D к первой направляющей 51 вдоль второго направления, обозначаемого с помощью стрелки A2.
[0206] Контактный элемент 9D имеет вал 90D, предоставленный рядом с центром между первой направляющей 51 и второй направляющей 52. Контактный элемент 9D также имеет пару контактных частей 91D, предоставленных между первой направляющей 51 и второй направляющей 52 из окрестности части, поддерживаемой посредством вала 90D, к стороне первой направляющей 51. Контактные части 91D предусмотрены на обеих сторонах в третьем направлении с интервалом, через который может проходить проволока W, обвязывающая арматурные стержни S. Контактные части 91D проходят в левую и правую стороны первой направляющей 51.
[0207] Контактный элемент 9D выполнен с возможностью вращаться вокруг вала 90D в качестве опорной точки относительно образующей корпус части 10, за счет этого перемещаясь между позицией готовности (фиг.30A), в которой контактные части 91D выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.30B), в которой контактные части 91D приближаются вплотную к образующей крышку части 11. Контактный элемент 9D поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности.
[0208] Когда два пересекающихся арматурных стержня S вставляются в отверстие 53 для вставки/вытаскивания, один арматурный стержень S расположен в одной боковой части первой направляющей 51, и другой арматурный стержень S расположен в другой боковой части первой направляющей 51. В конфигурации, в которой пара контактных частей контактного элемента предусмотрена между первой направляющей и второй направляющей, но не проходит в левую и правую стороны первой направляющей, уменьшается площадь контактных частей, в которых могут входить в контакт арматурные стержни, так что может быть затруднительным заставлять арматурные стержни надежно контактировать с контактными частями.
[0209] Напротив, пара контактных частей 91D контактного элемента 9D проходит из места между первой направляющей 51 и второй направляющей 52 к левой и правой сторонам первой направляющей 51. В силу этого, арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания, надежно входят в контакт с контактными частями 91D таким образом, что контактный элемент 9D может перемещаться в позицию для приведения в действие. Помимо этого, контактные части 91D контактного элемента 9D перемещаются в первом направлении, обозначаемом с помощью стрелки A1, посредством операции вращения вокруг вала 90D в качестве опорной точки. В силу этого, контактные части 91D могут подталкиваться посредством операции перемещения машины 1D для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, и необязательно перемещать машину 1D для обвязки арматурных стержней в другом направлении таким образом, чтобы приводить в действие контактный элемент 9A.
[0210] Машина 1D для обвязки арматурных стержней включает в себя первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент 9D перемещается в позицию для приведения в действие. Например, первый блок 14A вывода имеет такую конфигурацию, в которой вывод изменяется посредством смещения перемещаемого элемента 140. В настоящем примере, как показано на фиг.30A, когда контактный элемент 9D перемещается в позицию готовности, контактные части 91D контактного элемента 9D перемещаются в направлении от перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9D перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, когда контактные части 91D прижимаются к арматурным стержням, и контактный элемент 9D за счет этого перемещается в позицию для приведения в действие, как показано на фиг.30B, контактные части 91D контактного элемента 9D перемещаются в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9D перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0211] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9D перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда арматурные стержни S прижимаются к контактным частям 91D контактного элемента 9D, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0212] Машина 1E для обвязки арматурных стержней, показанная на фиг.31A и 31B, включает в себя направляющую часть 5, выполненную с возможностью направлять проволоку. Направляющая часть 5 имеет первую направляющую 51 и вторую направляющую 52. Первая направляющая 51 и вторая направляющая 52 присоединяются к концевому участку на передней стороне образующей корпус части 10 и проходят в первом направлении, обозначаемом с помощью стрелки A1. Вторая направляющая 52 предусмотрена обращенной к первой направляющей 51 во втором направлении, ортогональном к первому направлению и обозначаемом с помощью стрелки A2. Вторая направляющая 52 может быть выполнена с возможностью перемещаться в направлении к и от первой направляющей 51 посредством вращения вокруг вала (не показан) в качестве опорной точки.
[0213] Машина 1E для обвязки арматурных стержней включает в себя контактный элемент 9E, с которым входят в контакт арматурные стержни S. Контактный элемент 9E поддерживается посредством множества валов 90E и присоединяется к боковой части для образующей корпус части 10. Контактный элемент 9E имеет форму, протягивающуюся в первом направлении, обозначаемом с помощью стрелки A1, и концевой участок верхушки в первом направлении содержит контактные части 91E, обращенные к отверстию 53 для вставки/вытаскивания.
[0214] Контактный элемент 9E имеет продолговатые отверстия 96E в первом направлении, обозначаемом с помощью стрелки A1, и валы 94E вставляются в продолговатые отверстия 96E. В силу этого, контактный элемент 9E может перемещаться в первом направлении, обозначаемом с помощью стрелки A1, относительно образующей корпус части 10, и выполнен с возможностью перемещаться между позицией готовности (фиг.31A), в которой контактные части 91E выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.31B), в которой контактные части 91E приближаются вплотную к образующей крышку части 11.
[0215] Контактный элемент 9E поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности.
[0216] Машина 1E для обвязки арматурных стержней включает в себя первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент 9E перемещается в позицию для приведения в действие. Как показано на фиг.31A, когда контактный элемент 9E перемещается в позицию готовности, контактный элемент 9E перемещается в направлении от перемещаемого элемента 140 первого блока 14A вывода. Таким образом, в состоянии, в котором контактный элемент 9E перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, когда контактные части 91E прижимаются к арматурным стержням, и контактный элемент 9E за счет этого перемещается в позицию для приведения в действие, как показано на фиг.31B, контактный элемент 9E перемещается в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9E перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0217] Когда курок 10t нажимается, и в силу этого обнаруживается то, что вывод второго блока 13 вывода становится включенным, в состоянии, в котором контактный элемент 9E перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100A управления, показанный на фиг.8, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда арматурные стержни S прижимаются к контактным частям 91E контактного элемента 9E, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочий нажимает курок 10t, и в силу этого вывод второго блока 13 вывода становится включенным, блок 100A управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
[0218] Машина 1F для обвязки арматурных стержней, показанная на фиг.32A и 32B, применяется к машине для обвязки арматурных стержней, в которой первая образующая корпус часть 301 и вторая образующая корпус часть 302 соединяются посредством удлиненной соединительной части 303, как описано со ссылкой на фиг.16 и т.п. Машина 1F для обвязки арматурных стержней включает в себя направляющую часть 5B, выполненную с возможностью направлять проволоку. Направляющая часть 5B имеет первую направляющую 51B и вторую направляющую 52. Первая направляющая 51B и вторая направляющая 52 присоединяются к концевому участку на передней стороне второй части 302 корпуса и проходят в первом направлении, обозначаемом с помощью стрелки A1. Вторая направляющая 52 предусмотрена обращенной к первой направляющей 51B во втором направлении, ортогональном к первому направлению и обозначаемом с помощью стрелки A2. Вторая направляющая 52 может быть выполнена с возможностью перемещаться в направлении к и от первой направляющей 51B посредством вращения вокруг вала (не показан) в качестве опорной точки. Направляющая часть 5B имеет индукционную часть 59, выполненную с возможностью направлять арматурные стержни в отверстие 53 для вставки/вытаскивания. Индукционная часть 59 предусмотрена на концевой стороне верхушки первой направляющей 51B.
[0219] Машина 1F для обвязки арматурных стержней включает в себя контактный элемент 9D, с которым входят в контакт арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания между первой направляющей 51B и второй направляющей 52. Контактный элемент 9D поддерживается с возможностью вращения посредством вала 90D и присоединяется ко второй части 302 корпуса через образующая крышку часть 11. Контактный элемент 9D содержит контактные части 91D, предоставленные на одной стороне относительно вала 90D с возможностью входить в контакт с арматурными стержнями S. Контактные части 91D контактного элемента 9D проходят из вала 90D к первой направляющей 51B вдоль второго направления, обозначаемого с помощью стрелки A2.
[0220] Контактный элемент 9D имеет вал 90D, предоставленный рядом с центром между первой направляющей 51B и второй направляющей 52. Контактный элемент 9D также имеет пару контактных частей 91D, предоставленных между первой направляющей 51B и второй направляющей 52 из окрестности части, поддерживаемой посредством вала 90D, к стороне первой направляющей 51B. Контактные части 91D предусмотрены на обеих сторонах в третьем направлении с интервалом, через который может проходить проволока W, обвязывающая арматурные стержни S. Контактные части 91D проходят в левую и правую стороны первой направляющей 51B.
[0221] Контактный элемент 9D выполнен с возможностью вращаться вокруг вала 90D в качестве опорной точки относительно второй части 302 корпуса, за счет этого перемещаясь между позицией готовности (фиг.32A), в которой контактные части 91D выступают из образующей крышку части 11 в отверстие 53 для вставки/вытаскивания, и позицией для приведения в действие (фиг.32B), в которой контактные части 91D приближаются вплотную к образующей крышку части 11. Контактный элемент 9D поджимается в направлении перемещения в позицию готовности посредством поджимающего элемента (не показан) и удерживается в позиции готовности.
[0222] Когда два пересекающихся арматурных стержня S вставляются в отверстие 53 для вставки/вытаскивания, один арматурный стержень S расположен в одной боковой части первой направляющей 51B, и другой арматурный стержень S расположен в другой боковой части первой направляющей 51B. Напротив, пара контактных частей 91D контактного элемента 9D проходит из места между первой направляющей 51B и второй направляющей 52 к левой и правой сторонам первой направляющей 51B. В силу этого, арматурные стержни S, вставленные в отверстие 53 для вставки/вытаскивания, надежно входят в контакт с контактными частями 91D таким образом, что контактный элемент 9D может перемещаться в позицию для приведения в действие. Помимо этого, контактные части 91D контактного элемента 9D перемещаются в первом направлении, обозначаемом с помощью стрелки A1, посредством операции вращения вокруг вала 90D в качестве опорной точки. В силу этого, контактные части 91D могут подталкиваться посредством операции перемещения машины 1F для обвязки арматурных стержней в направлении вставки арматурных стержней S в отверстие 53 для вставки/вытаскивания, и необязательно перемещать машину 1F для обвязки арматурных стержней в другом направлении таким образом, чтобы приводить в действие контактный элемент 9A.
[0223] Машина 1F для обвязки арматурных стержней включает в себя первый блок 14A вывода, выполненный с возможностью обнаруживать то, что контактный элемент 9D перемещается в позицию для приведения в действие. Как показано на фиг.32A, когда контактный элемент 9D перемещается в позицию готовности, контактные части 91D контактного элемента 9D перемещаются в направлении от перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9D перемещается в позицию готовности, вывод первого блока 14A вывода задается в качестве отключенного состояния. Напротив, когда контактные части 91D прижимаются к арматурным стержням, и контактный элемент 9D за счет этого перемещается в позицию для приведения в действие, как показано на фиг.32B, контактные части 91D контактного элемента 9D перемещаются в направлении подталкивания перемещаемого элемента 140. Таким образом, в состоянии, в котором контактный элемент 9D перемещается в позицию для приведения в действие, вывод первого блока 14A вывода задается в качестве включенного состояния.
[0224] Когда контактный элемент 9D перемещается в позицию для приведения в действие, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, в состоянии, в котором рабочая часть 304t приводится в работу, и в силу этого обнаруживается то, что вывод второго блока 15 вывода становится включенным, блок 100B управления, показанный на фиг.25, управляет подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W, как описано выше. Альтернативно, когда захватная часть 304R захватывается, чтобы приводить в действие рабочую часть 304t рабочим, и в силу этого вывод второго блока 15 вывода становится включенным, в состоянии, в котором арматурные стержни S прижимаются к контактным частям 91D контактного элемента 9D, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок 100B управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W. Следует отметить, что рабочая часть 304t и второй блок 15 вывода могут не предоставляться, и когда арматурные стержни S прижимаются к контактным частям 91D контактного элемента 9D, и в силу этого обнаруживается то, что вывод первого блока 14A вывода становится включенным, блок управления может управлять подающим электромотором 31 и скручивающим электромотором 80 таким образом, чтобы выполнять последовательность операций обвязки арматурных стержней S с помощью проволоки W.
Настоящая заявка основана на патентной заявке Японии № 2018-168247, поданной 7 сентября 2018, содержимое которой содержится в данном документе по ссылке.
Список ссылочных позиций
[0225] 1A, 1B, 1C - машина для обвязки арматурных стержней, 10 - образующая корпус часть, 10h - часть в виде рукоятки, 10t - курок, 11 - образующая крышку часть, 12A, 12B, 14A - первый блок вывода, 120, 140 - перемещаемый элемент, 13, 15 - второй блок вывода, 2 - размещающая часть, 20 - проволочная бобина, 3 - блок подачи, 30 - подающая шестерня, 31 - подающий электромотор, 4 - регулирующая часть, 42 - регулирующий элемент, 43 - регулирующий элемент, 44 - трансмиссионный механизм, 5, 5B - направляющая часть, 51, 51B - первая направляющая, 51g - направляющая поверхность, 51h - участок паза, 51c - концевой участок, 52 - вторая направляющая, 52a - боковая направляющая, 52b - вал, 52c - концевой участок, 53 - отверстие для вставки/вытаскивания, 54 - поджимающий элемент, 55 - продолговатое отверстие, 56 - вал, 57 - смещаемая часть, 58 - элемент обнаружения, 59 - индукционная часть, 6 - режущий блок, 60 - часть с неподвижным лезвием, 60a - отверстие, 61 - часть с подвижным лезвием, 62 - трансмиссионный механизм, 7 - скручивающий блок, 70 - зацепляющая часть, 71 - приводная часть, 8 - блок привода, 80 - скручивающий электромотор, 81 - редуктор, 82 - вращательный вал, 83 - перемещаемый элемент, 9A, 9B, 9C - контактный элемент (подвижная направляющая часть), 90A, 90B, 90C - вал 91A, 91B, 91C - контактная часть, 92A, 92B, 92C - соединительная часть, 93A, 93B, 93C - смещающая часть, 94B - вал, 95B - приводная часть, 96B - продолговатое отверстие, 97B - приводимая часть, 100A, 100B, 100C - блок управления, 101 - блок обнаружения, 102 - электромотор для открытия/закрытия направляющих, 301 - первая часть корпуса, 302 - вторая часть корпуса, 303 - соединительная часть, 304h - часть в виде рукоятки, 304L, 304R - захватная часть, 304t - рабочая часть, W – проволока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2797819C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2797485C2 |
| Обвязочная машина | 2021 |
|
RU2812842C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2807053C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2818274C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2806762C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2021 |
|
RU2818741C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2675829C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2764843C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2019 |
|
RU2799425C2 |
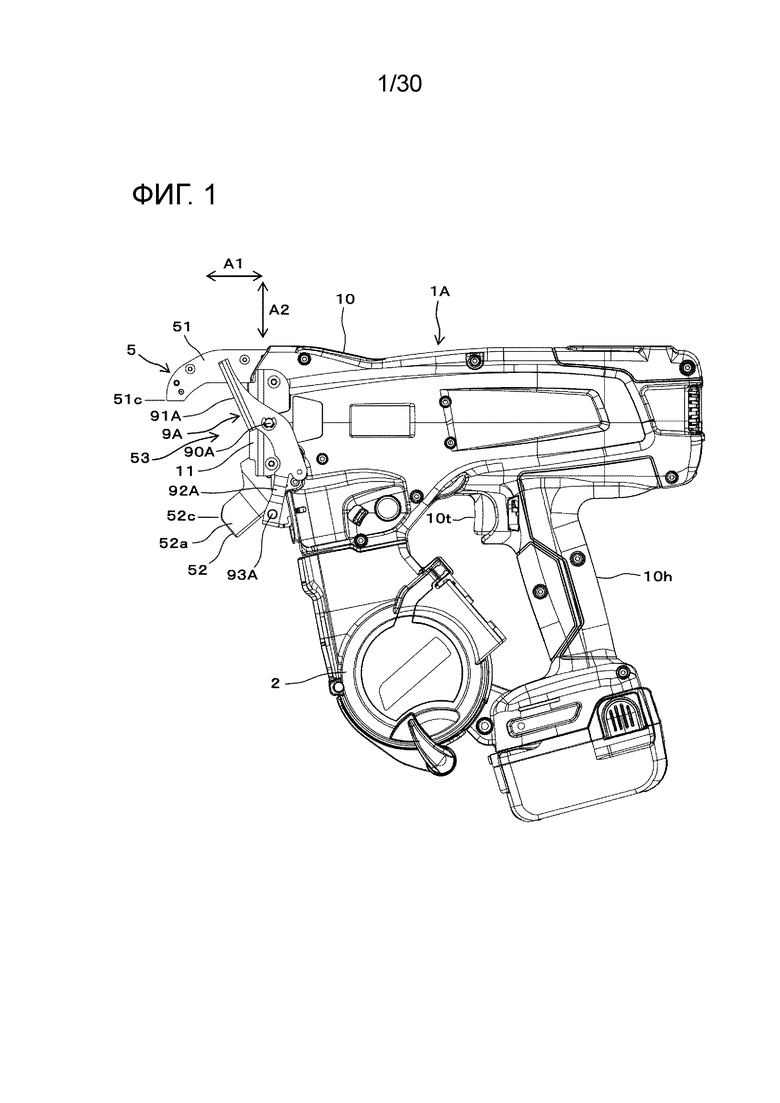
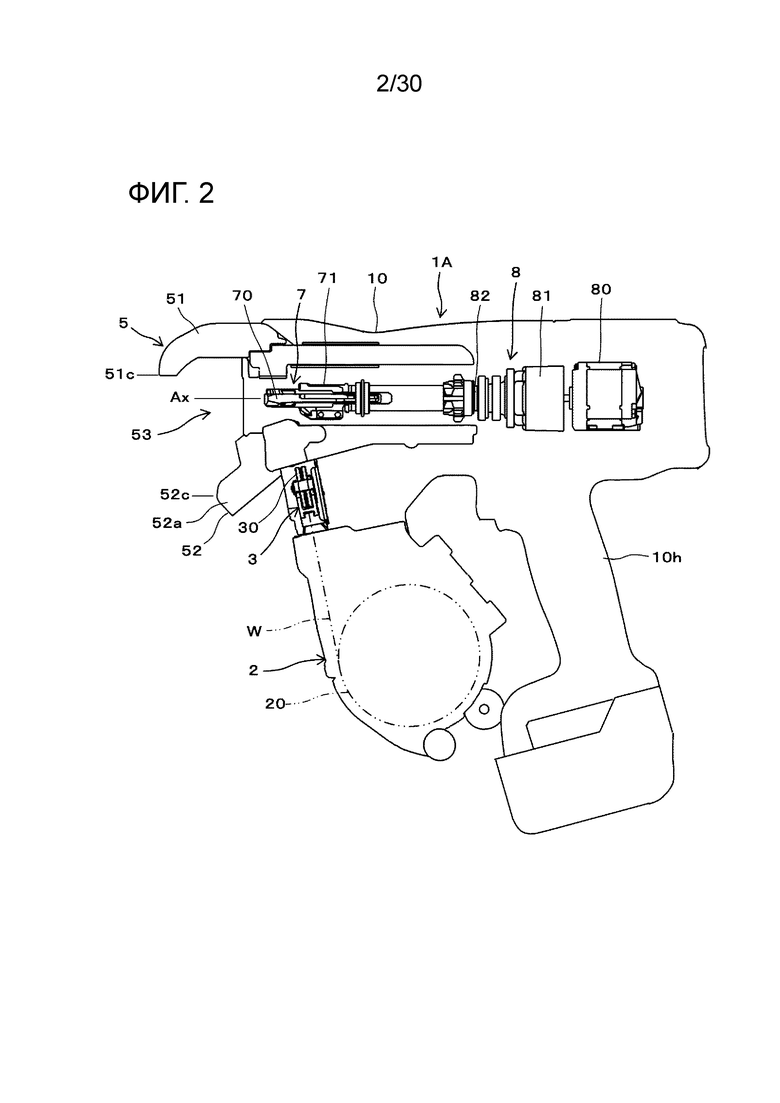
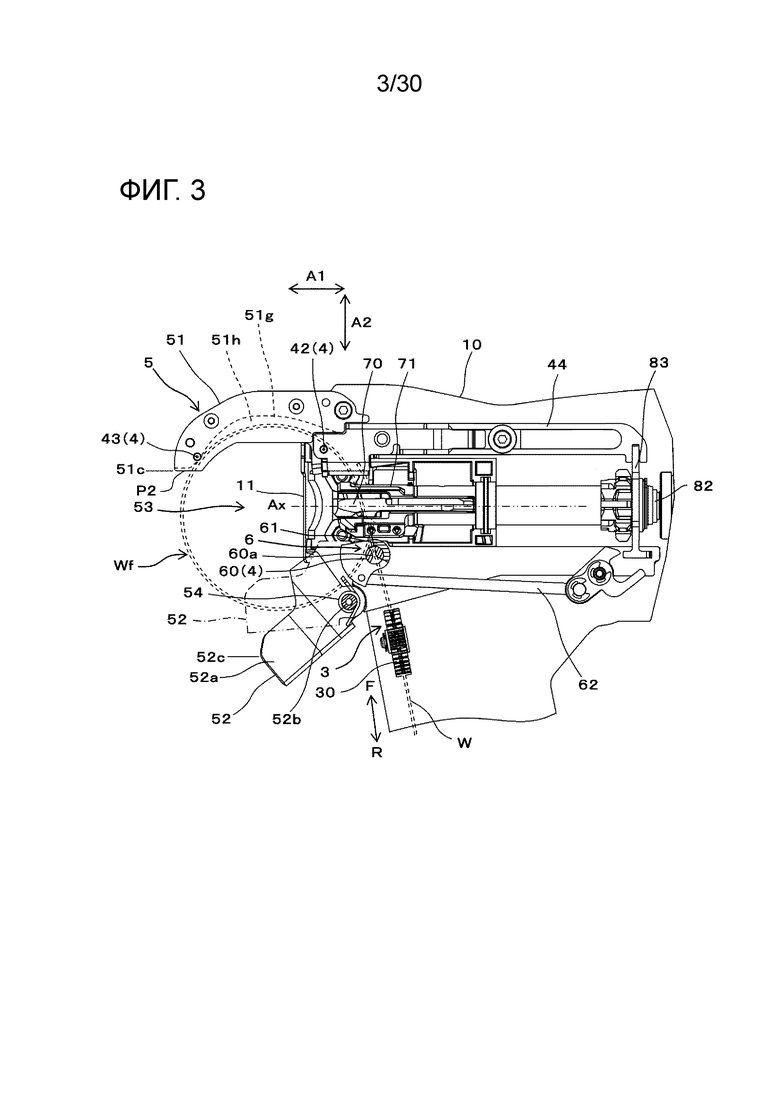
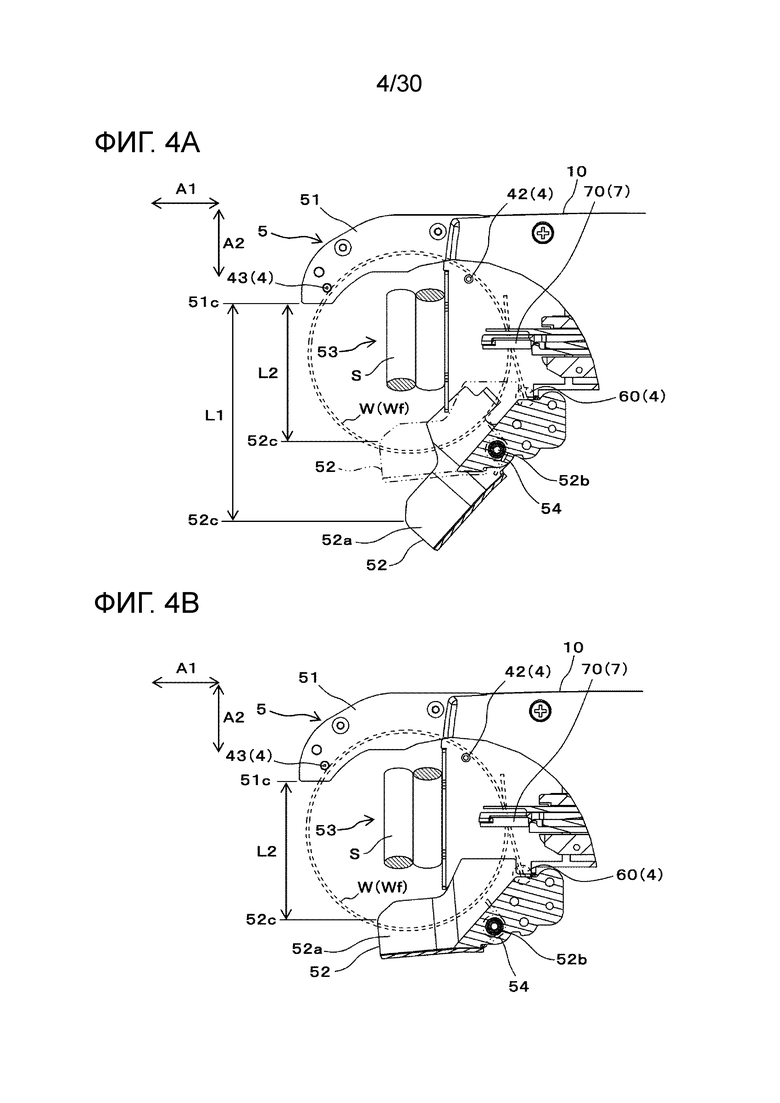
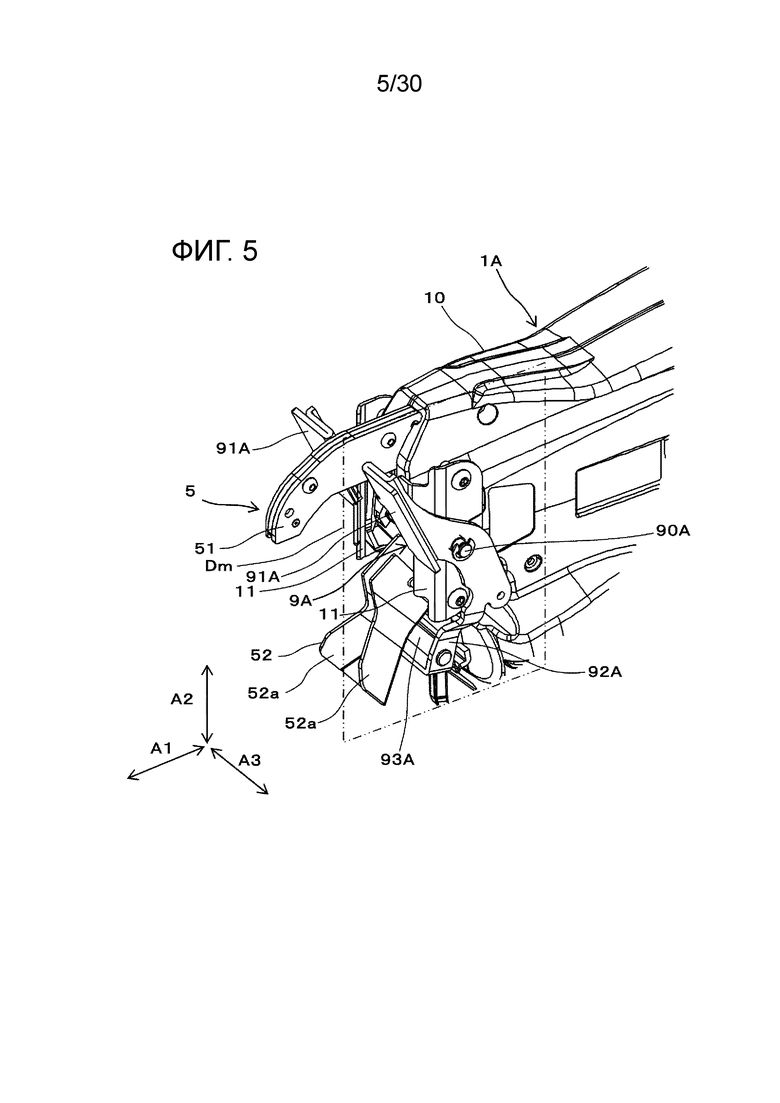
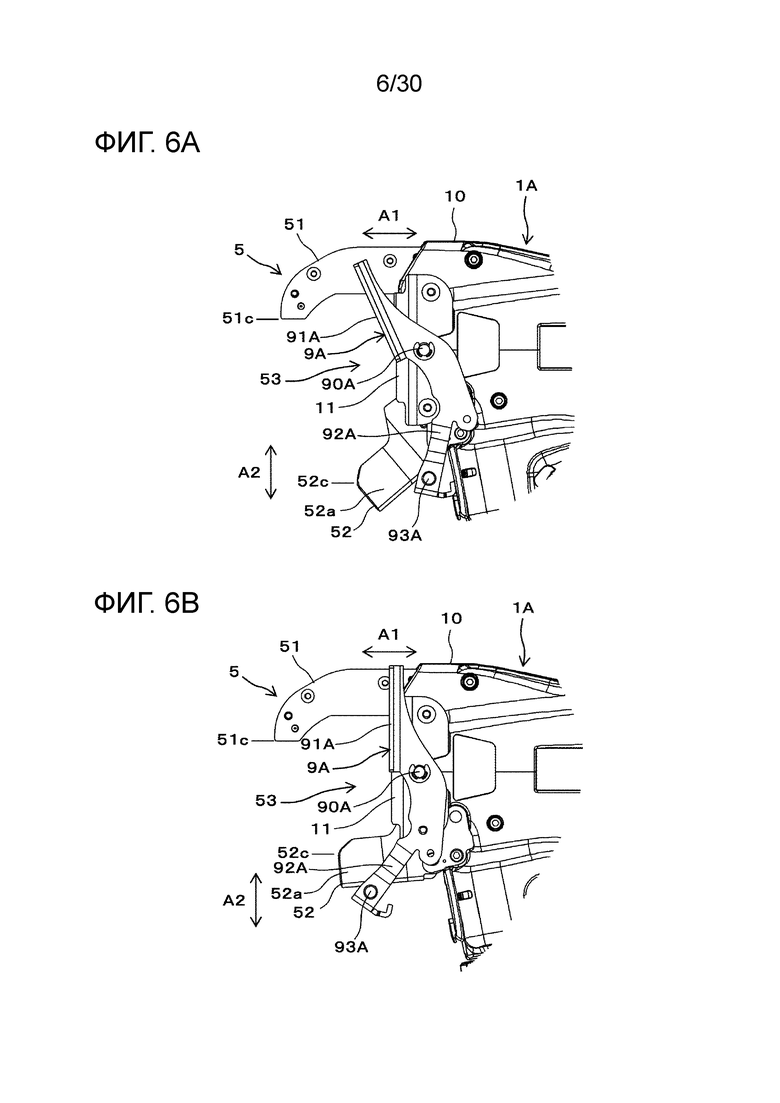
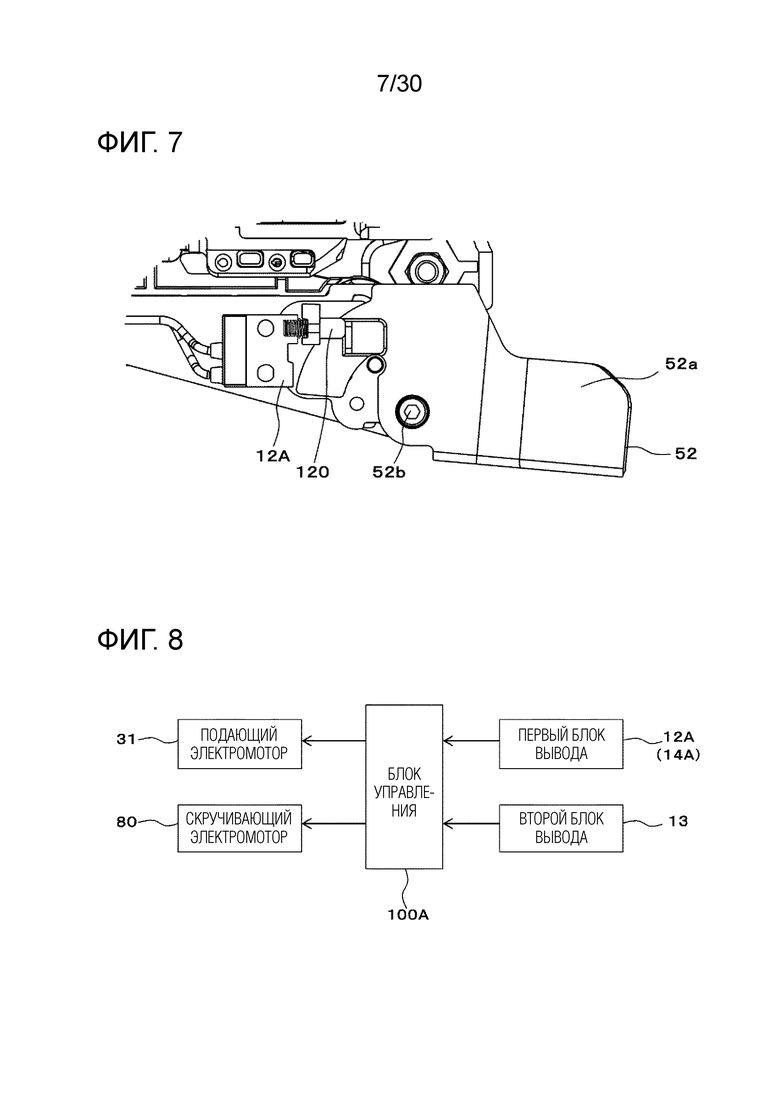
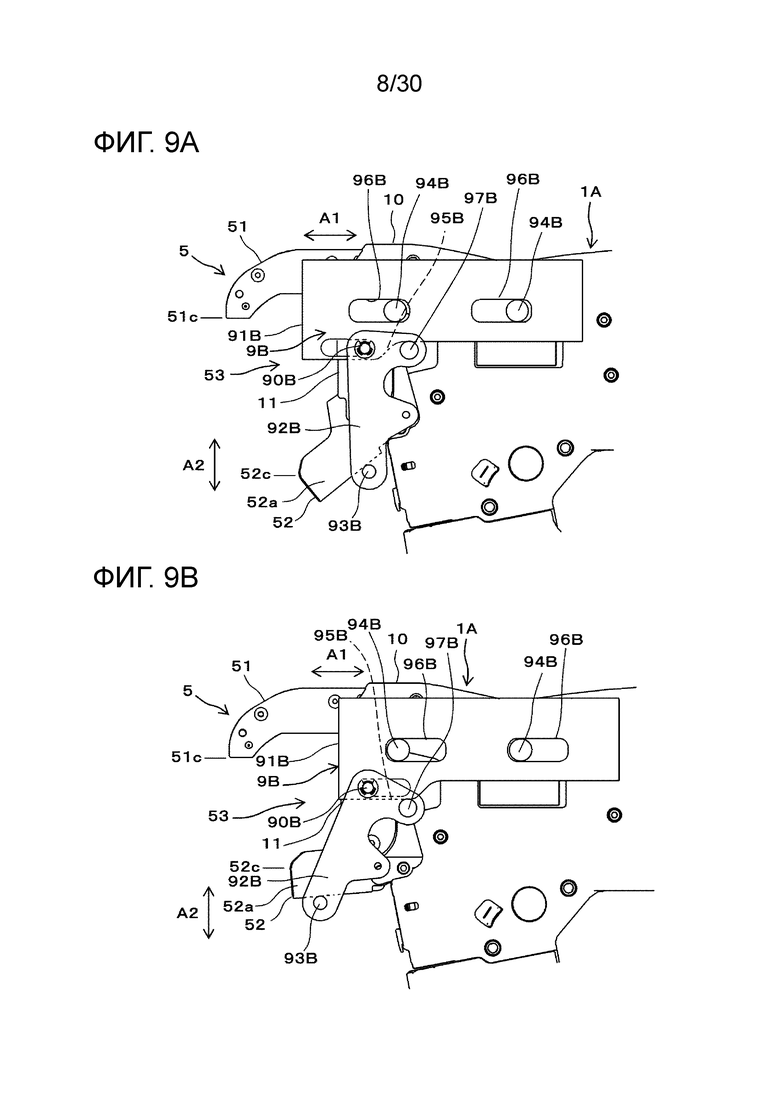
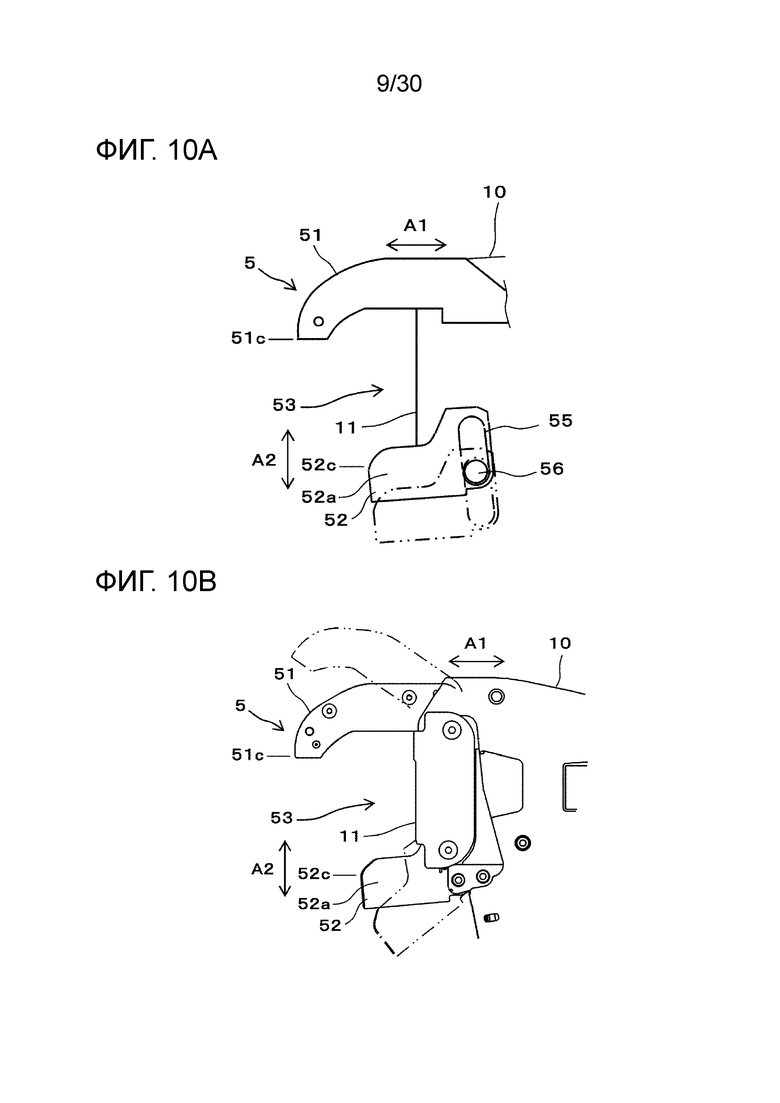
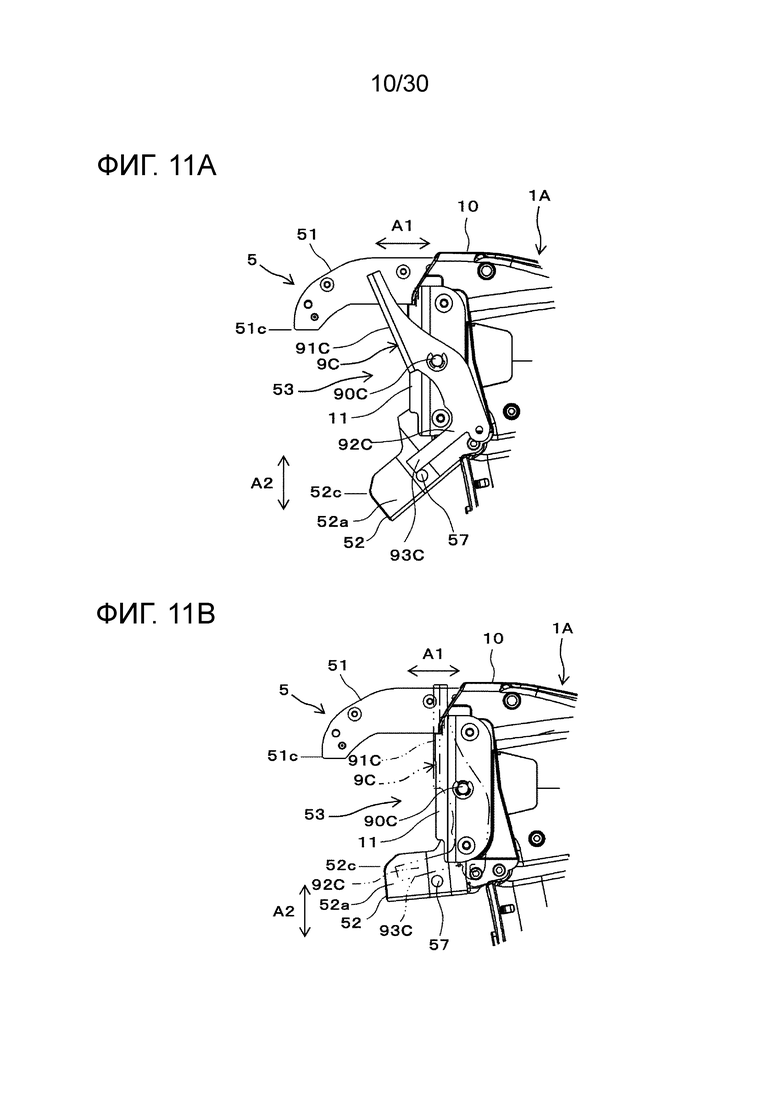
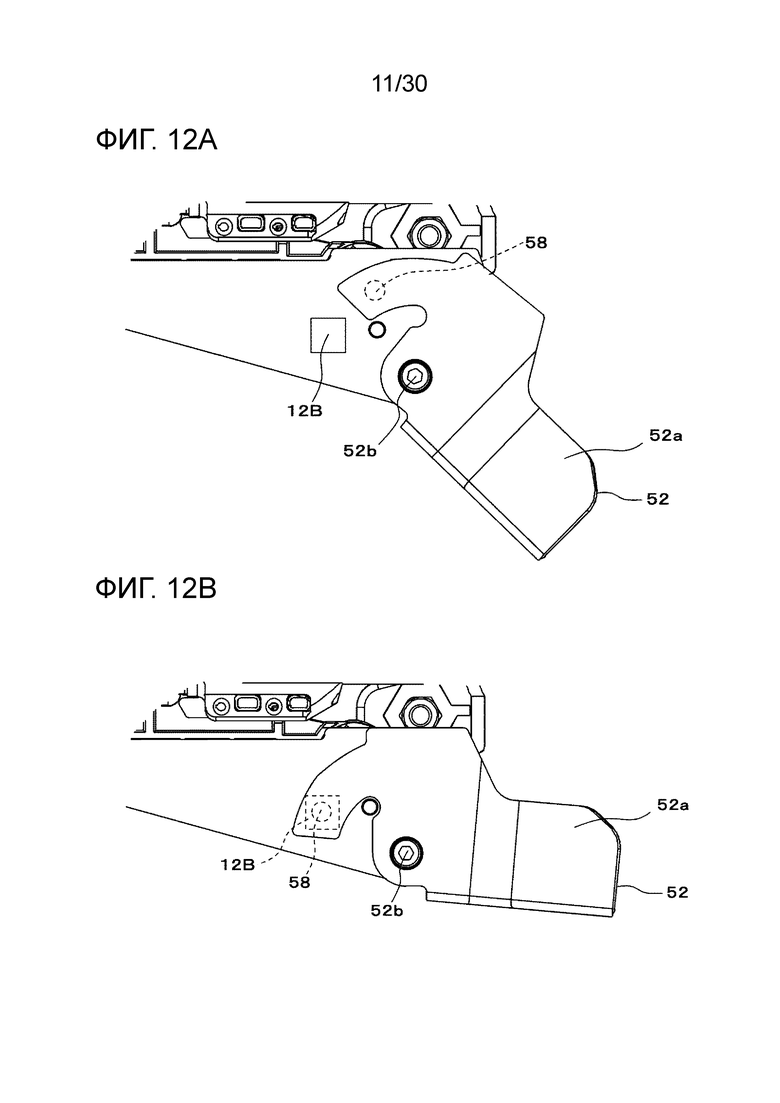
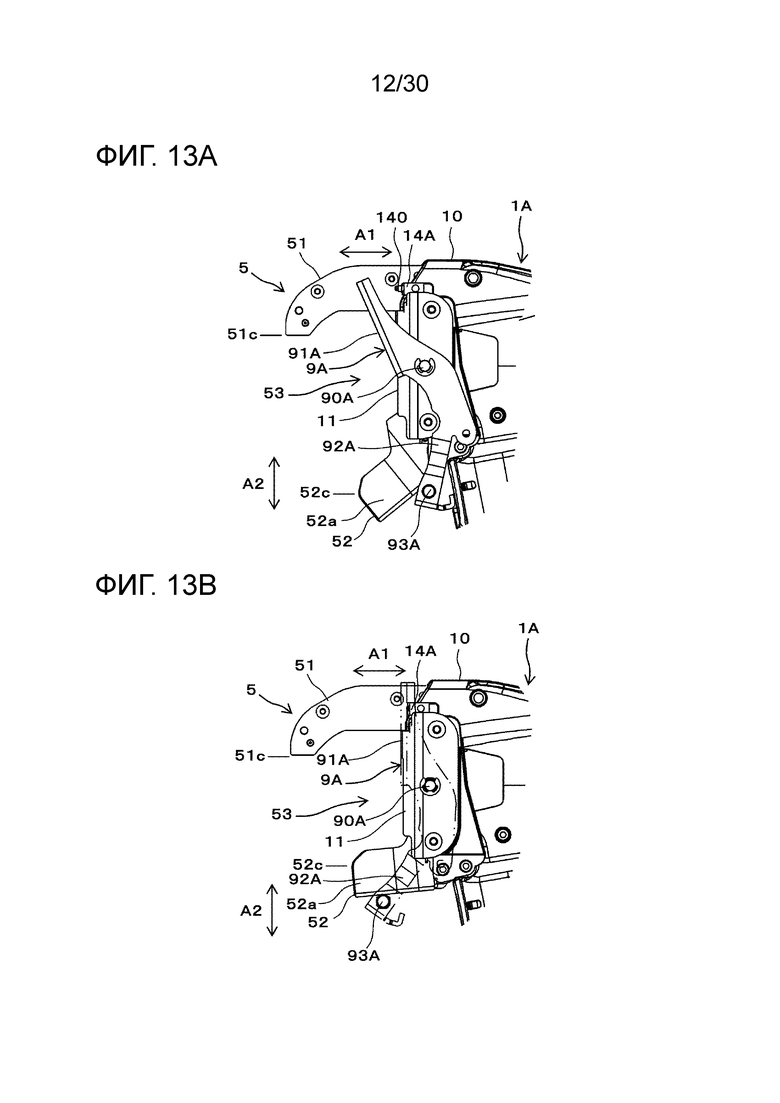
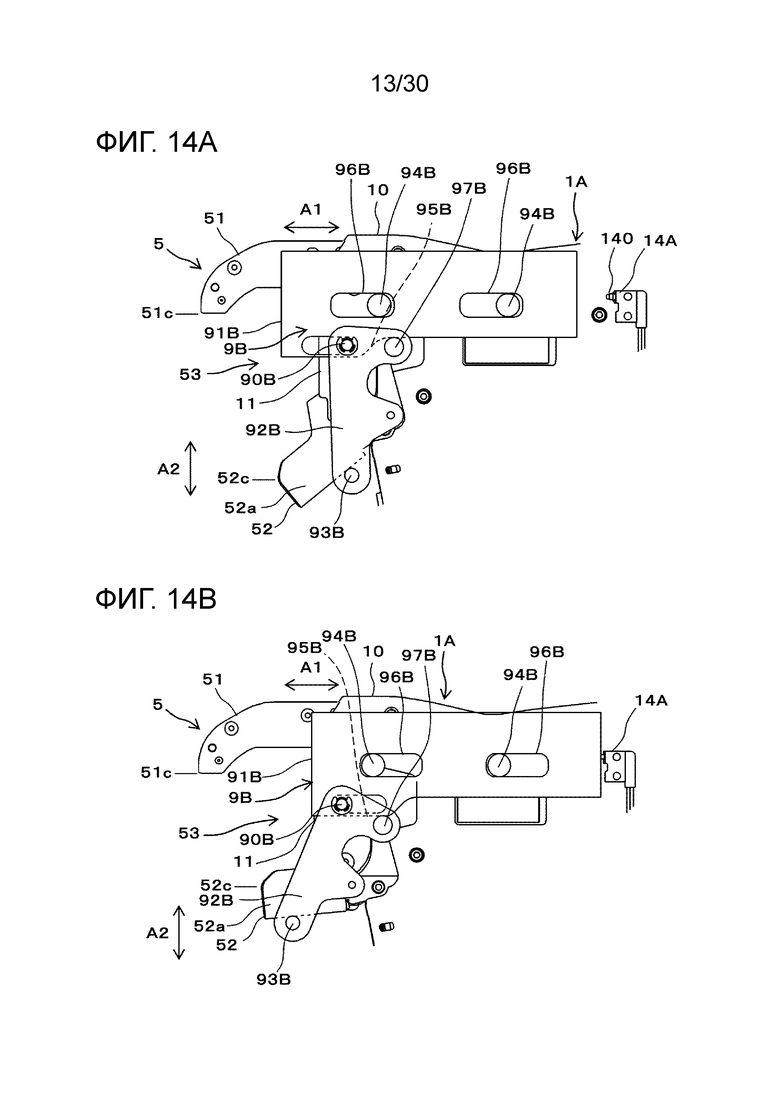
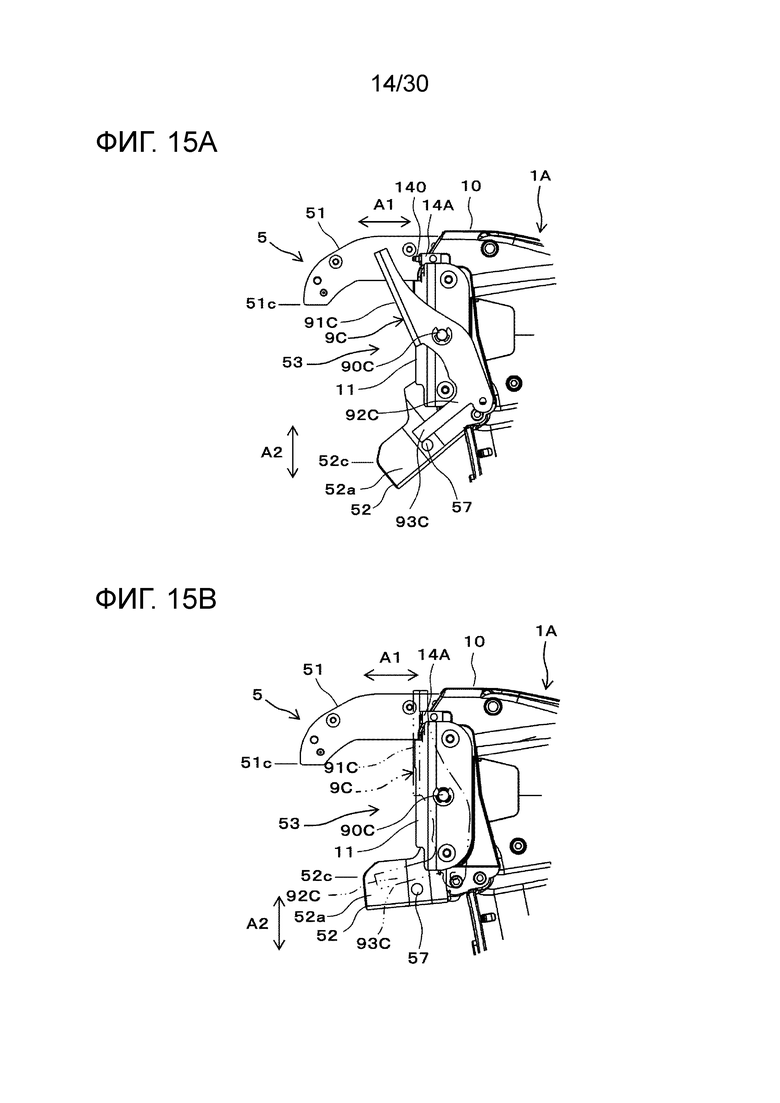
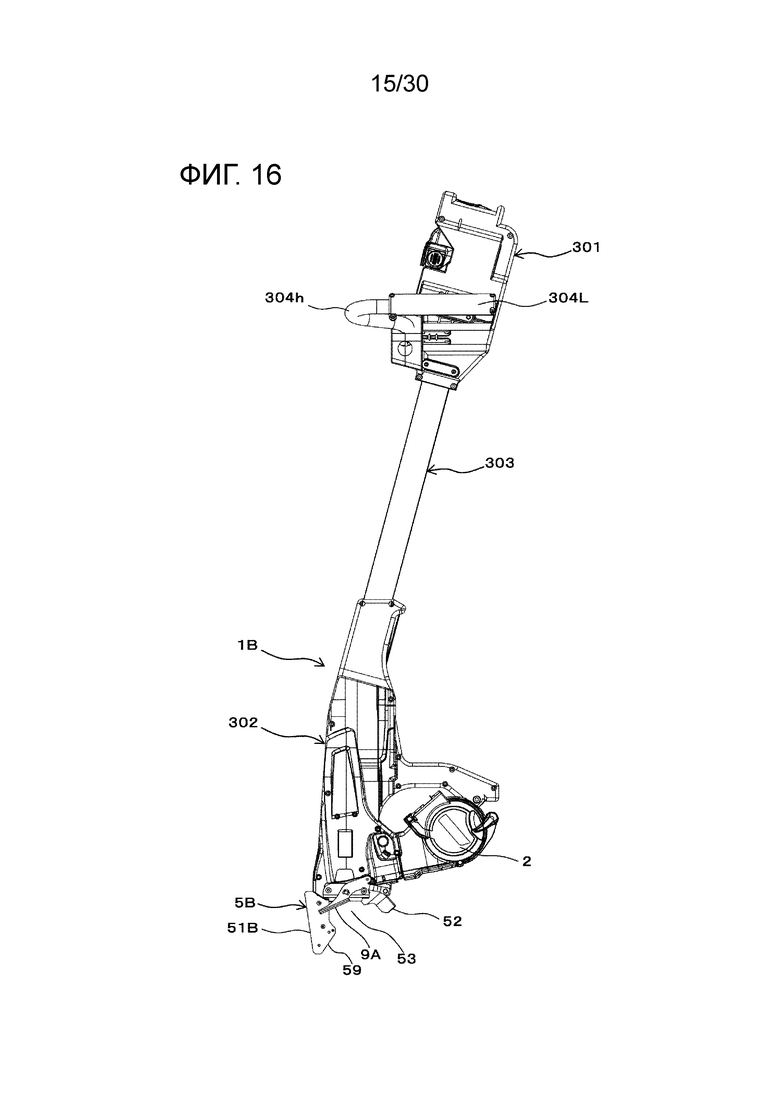
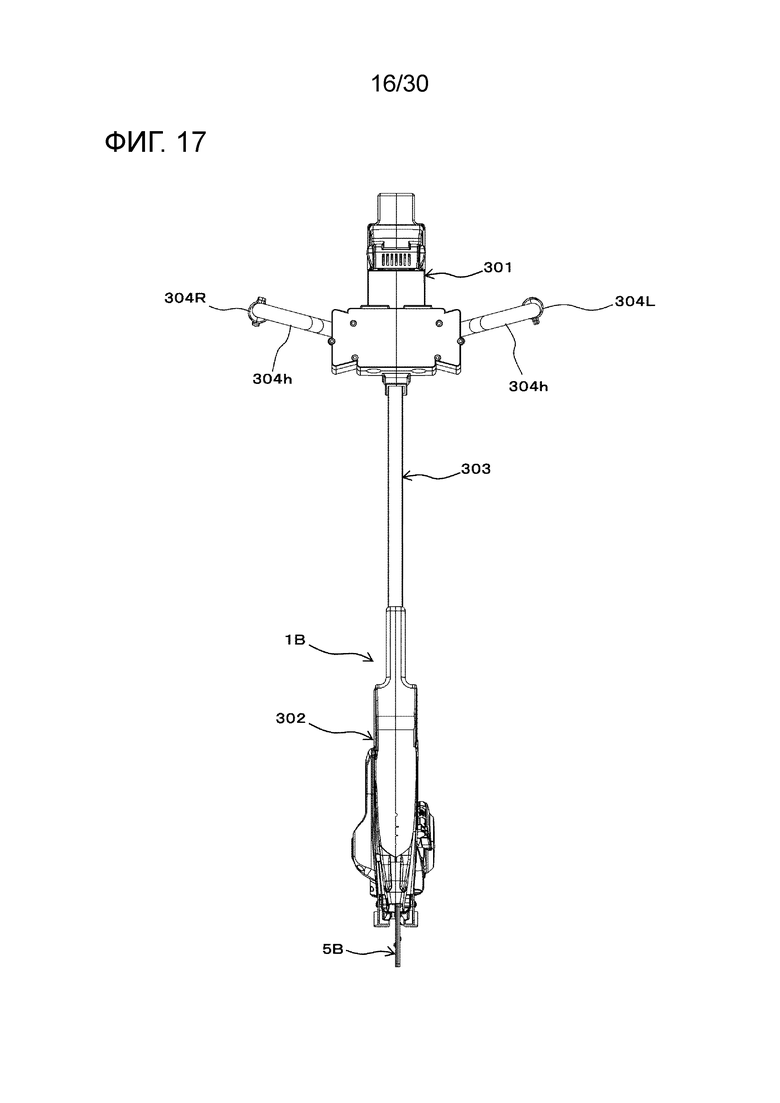
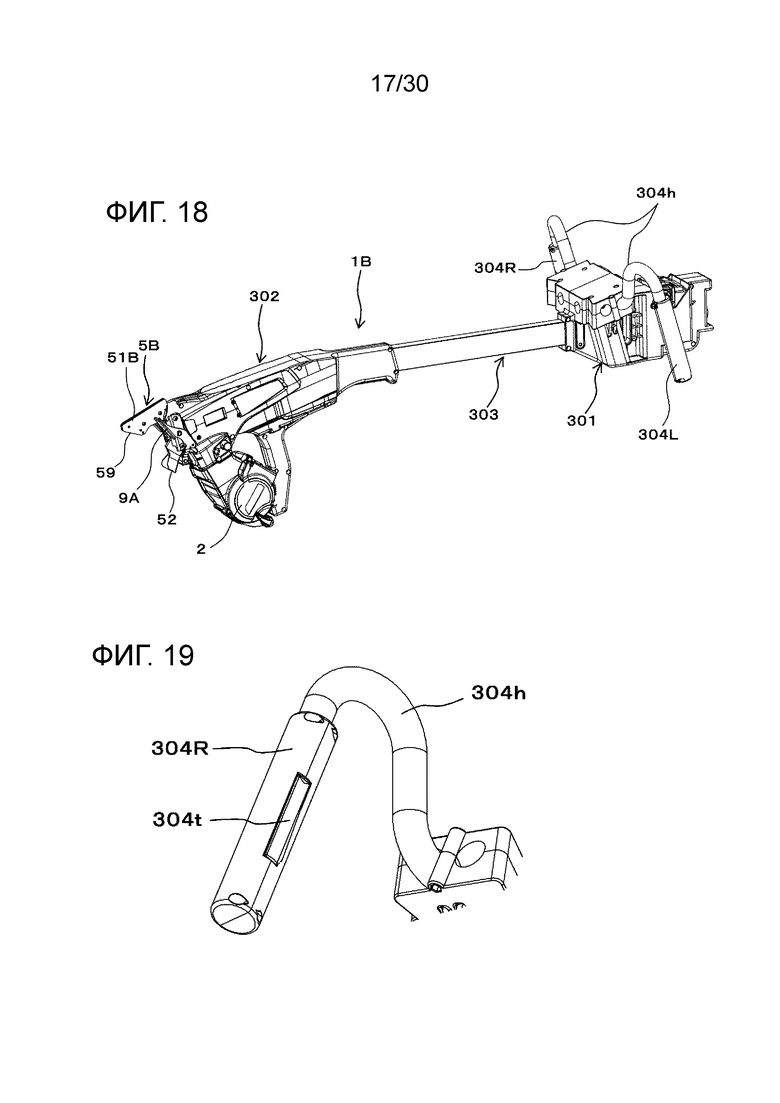
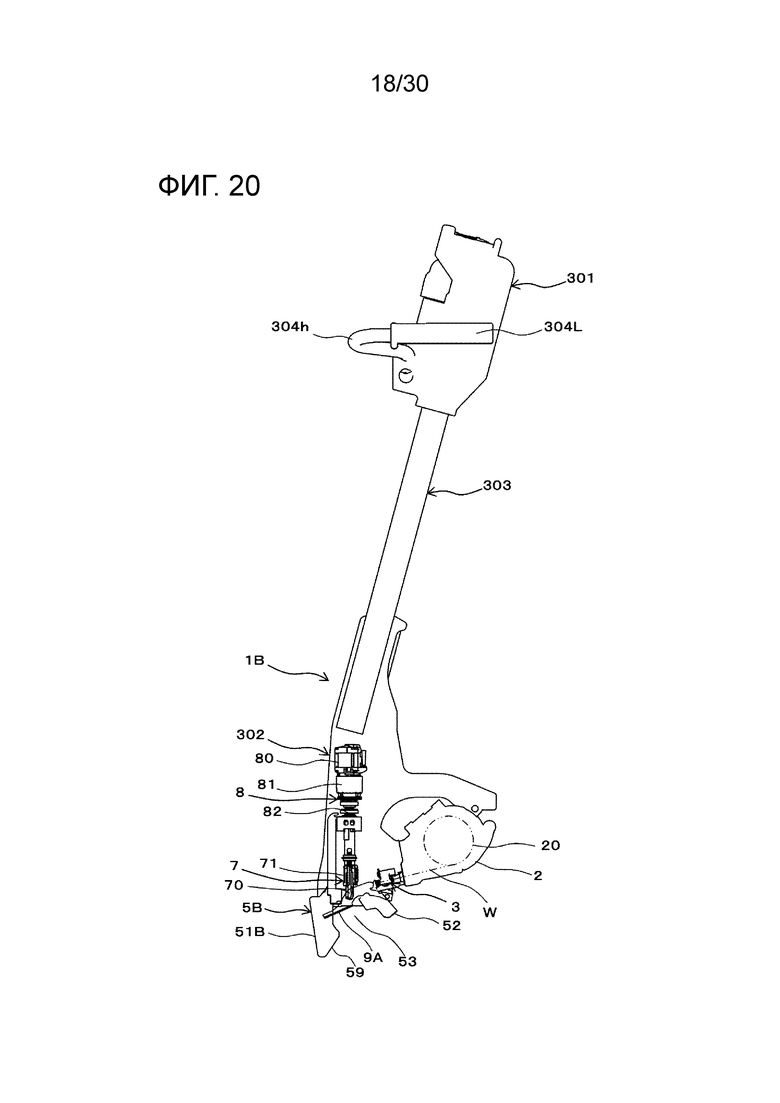
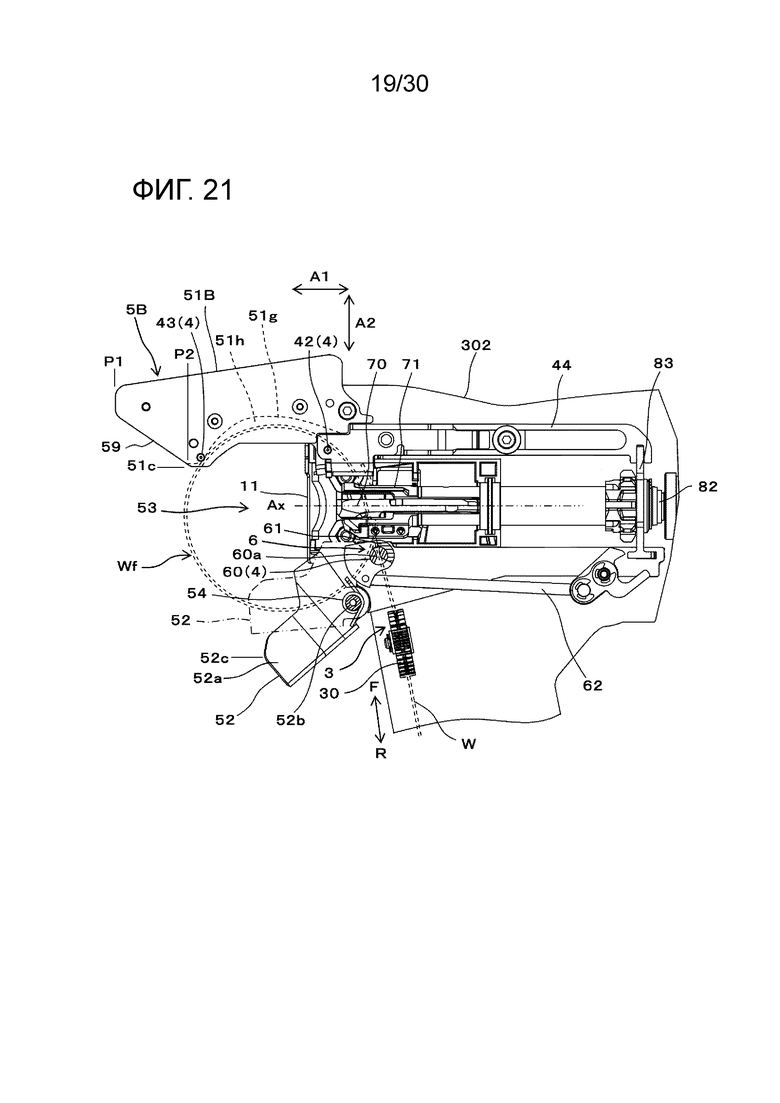
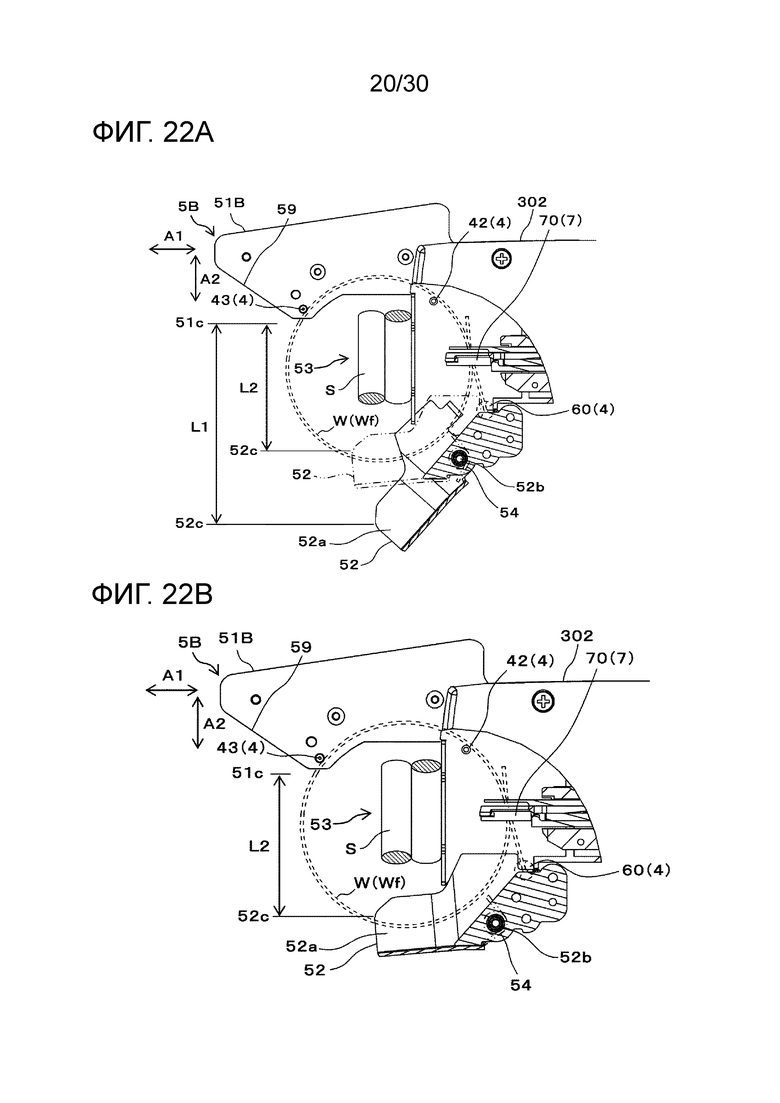
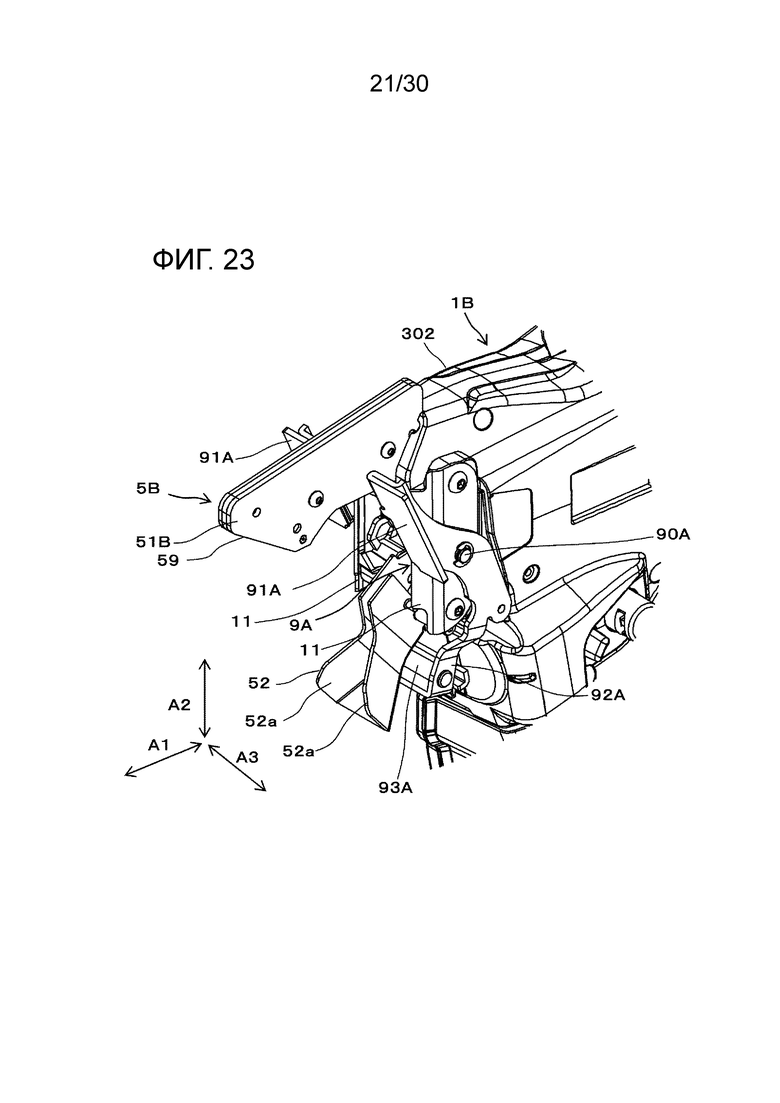
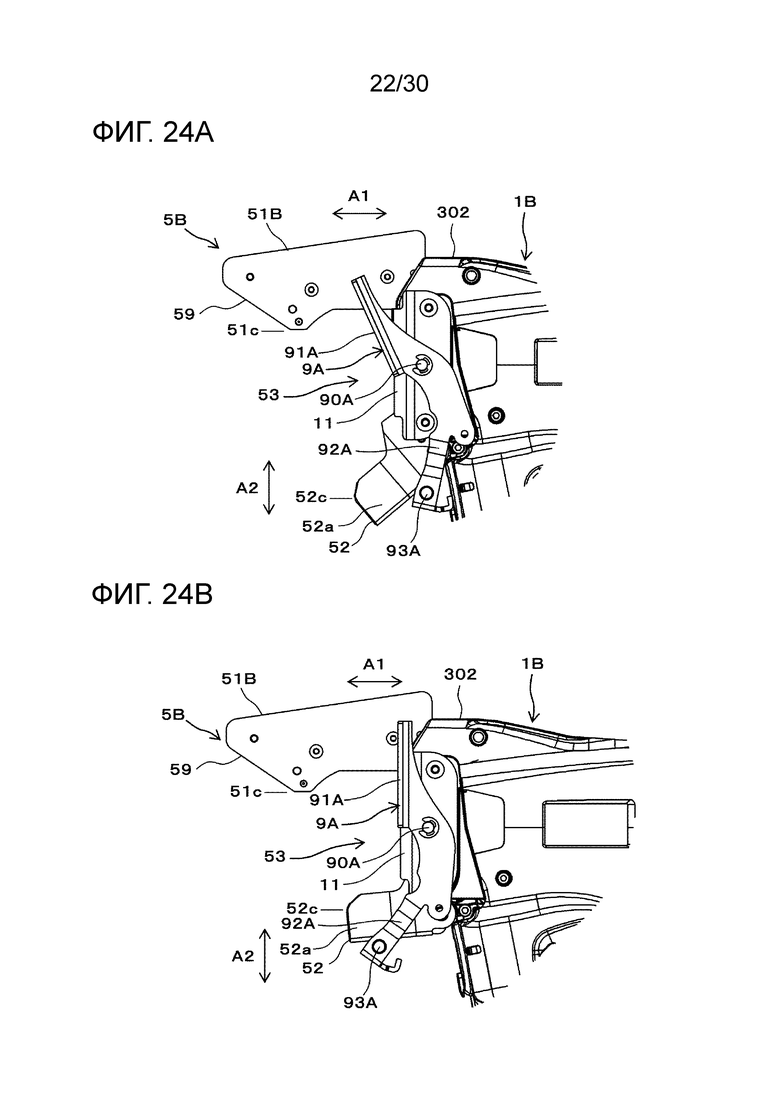
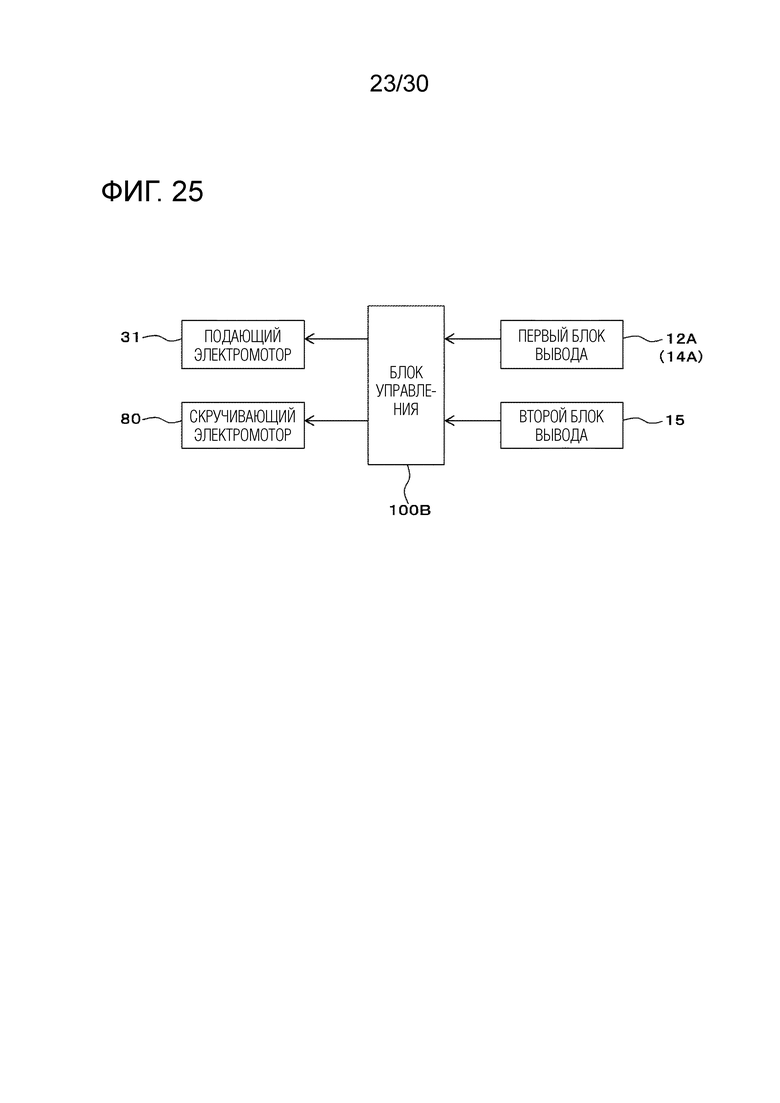
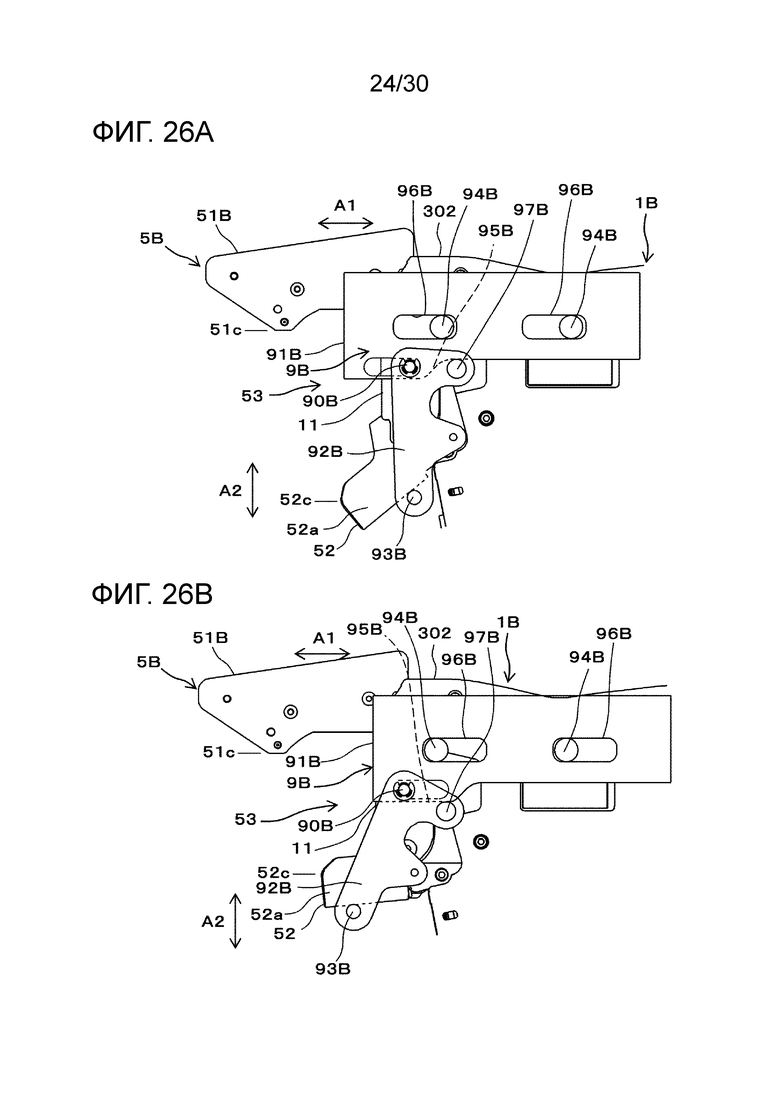
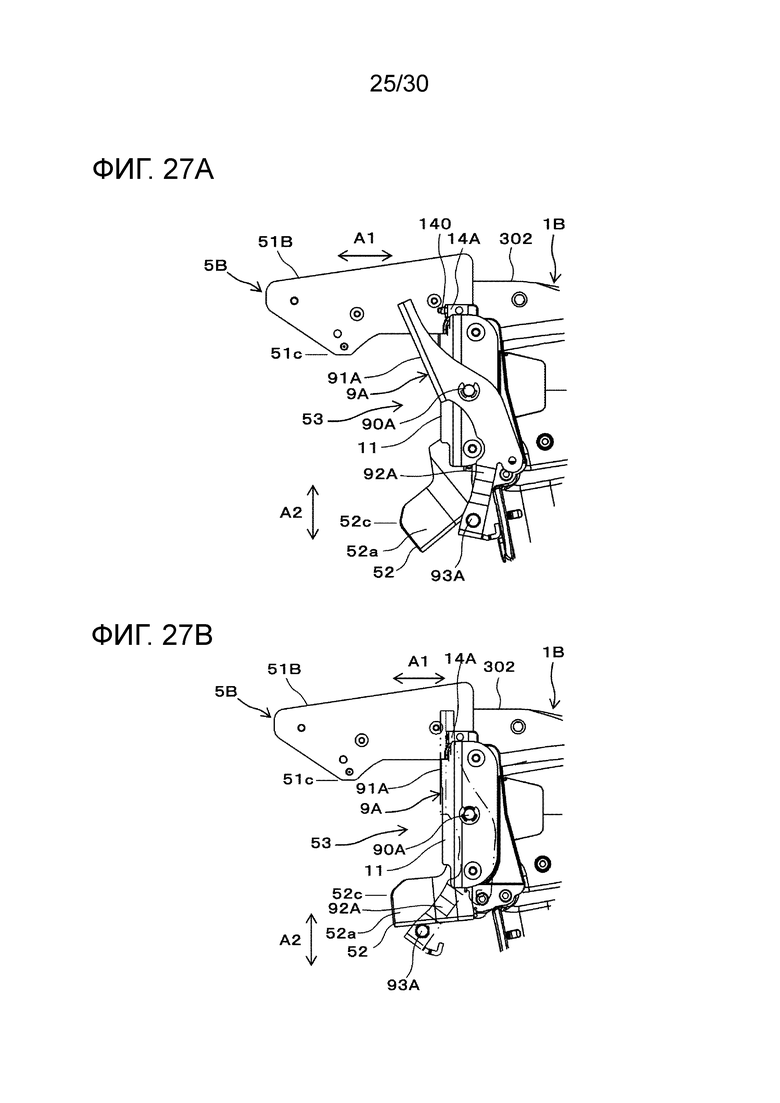
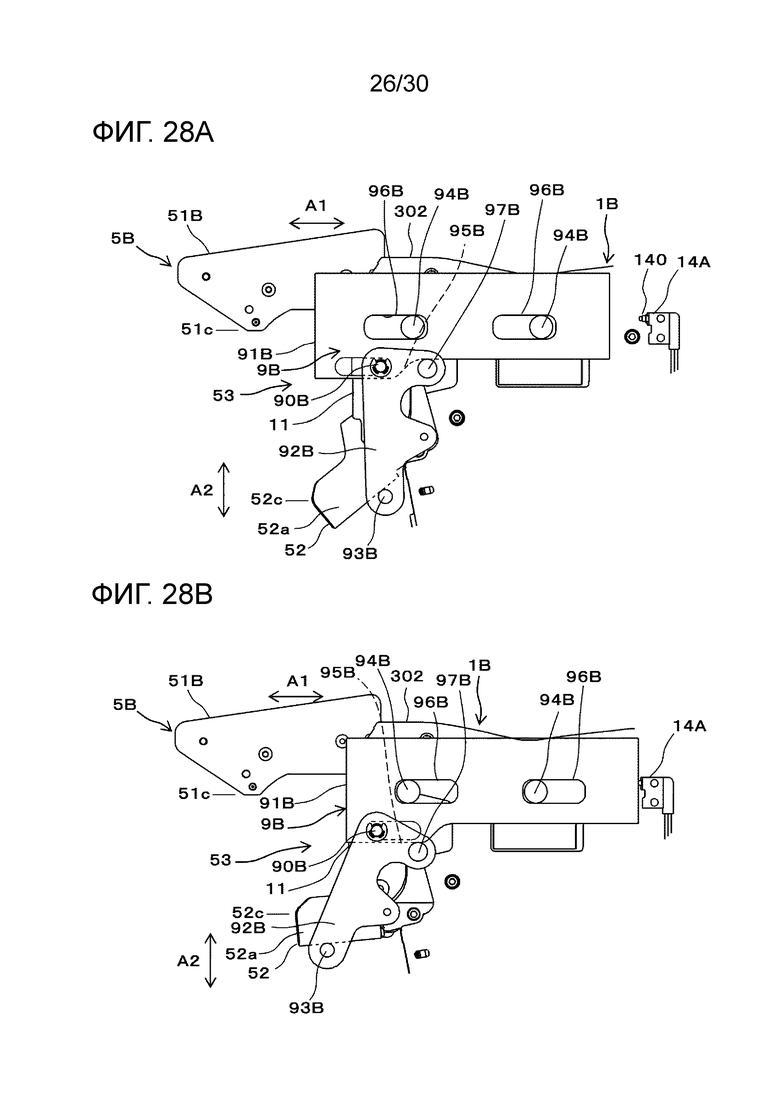
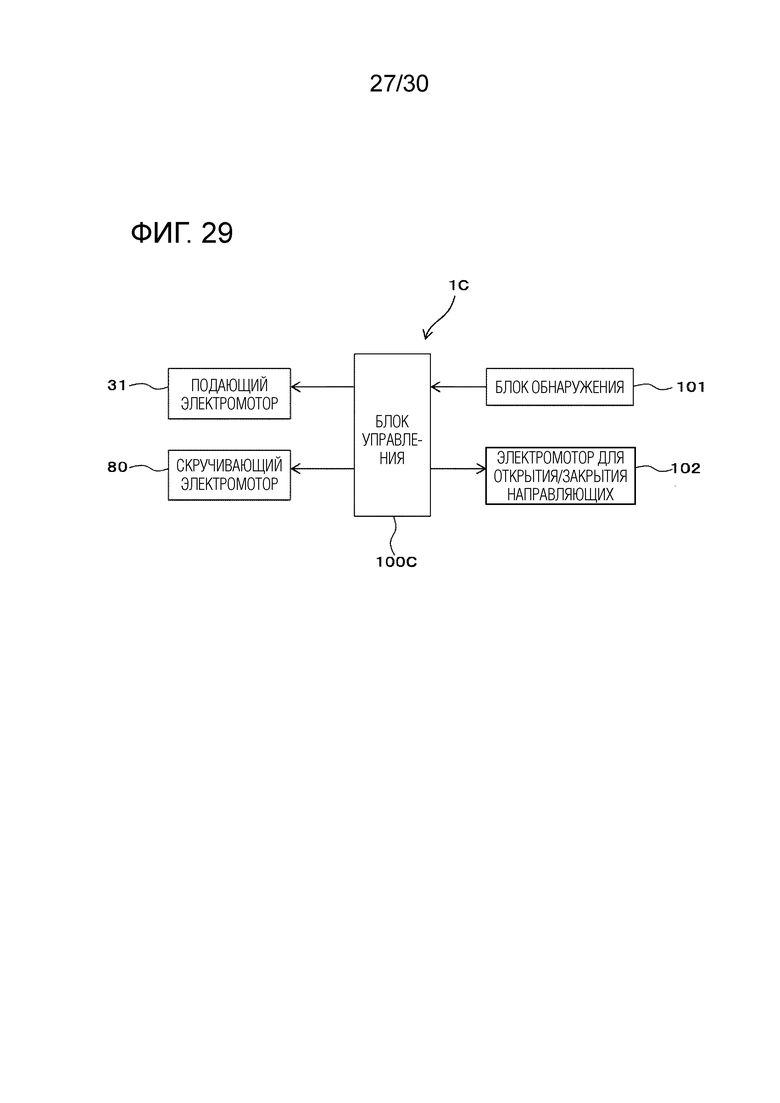
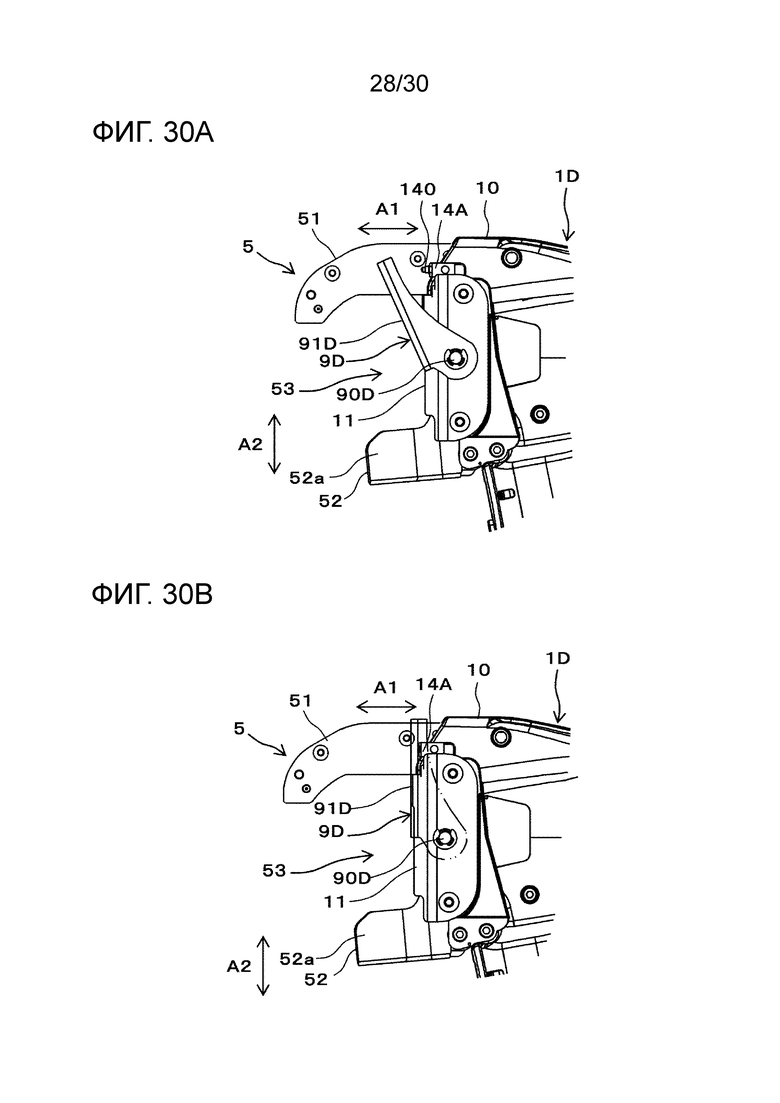
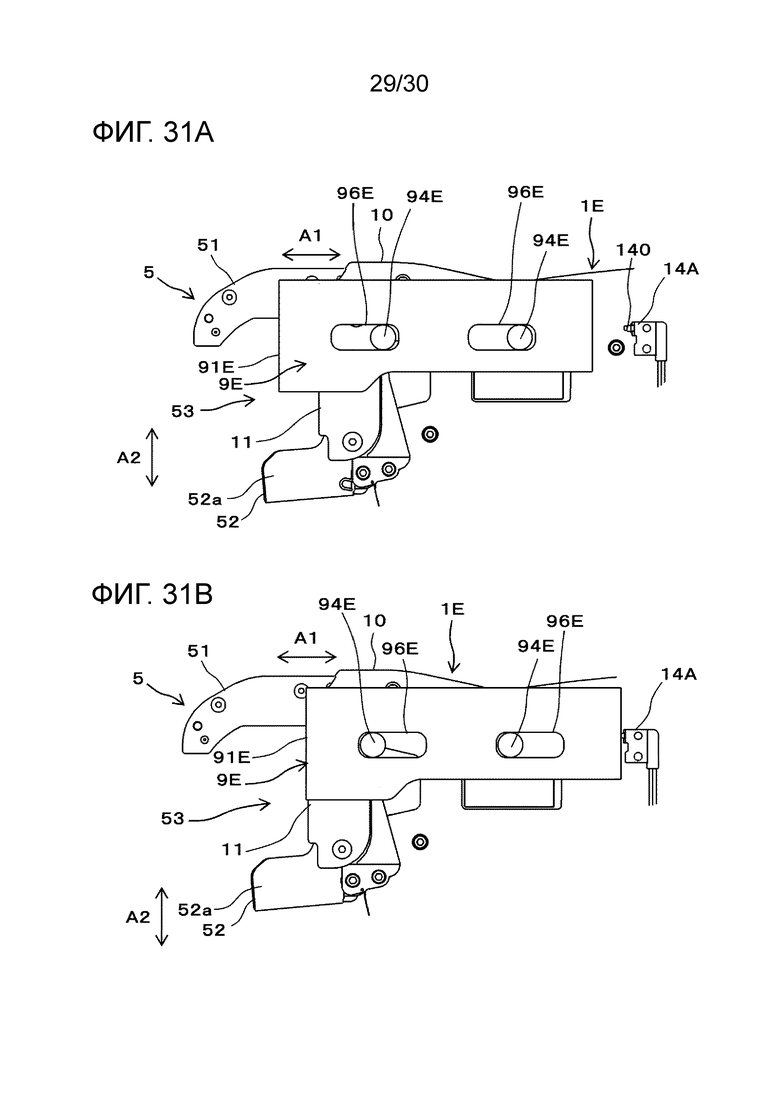
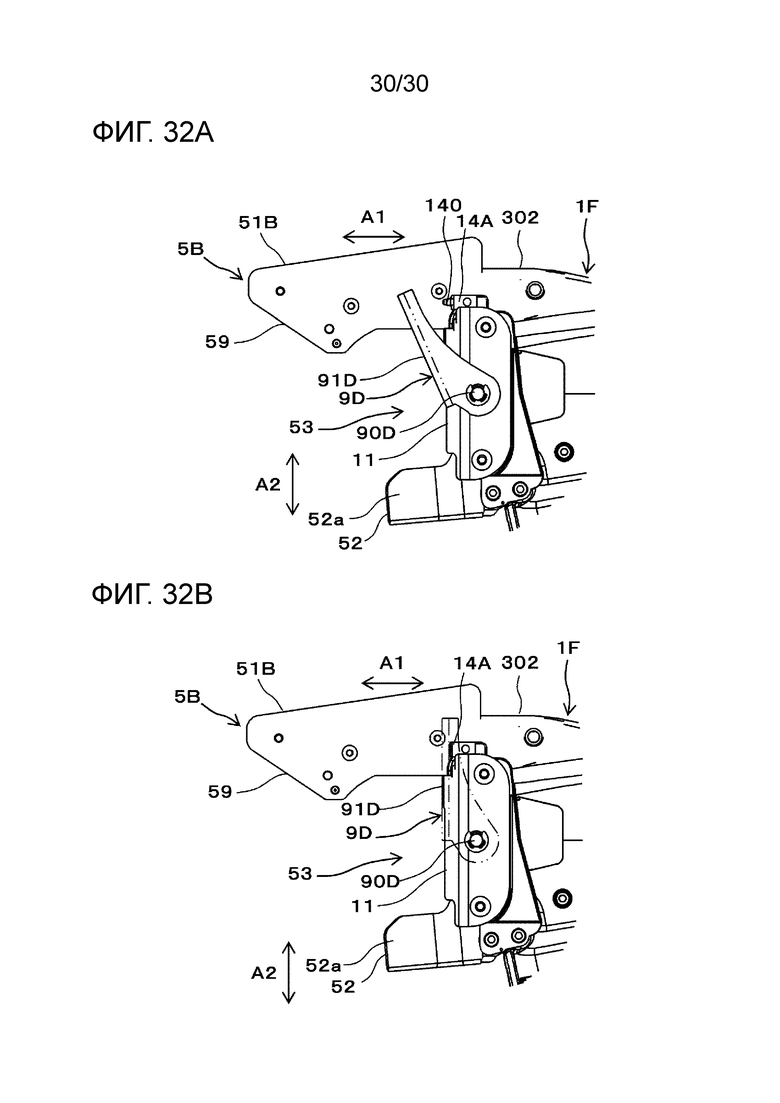
Изобретение относится к обвязочной машине, выполненной с возможностью обвязывать обвязываемый объект, такой как арматурный стержень, с помощью проволоки. Техническим результатом является создание обвязочной машины, сконфигурированной таким образом, что арматурные стержни могут легко вставляться между парой направляющих. Технический результат достигается тем, что обвязочная машина содержит: образующую корпус часть; блок подачи, выполненный с возможностью подавать проволоку; первую направляющую и вторую направляющую, проходящие в первом направлении от концевого участка на одной стороне образующей корпус части, размещаемые с интервалом, в котором вставляется обвязываемый объект, во втором направлении, ортогональном к первому направлению, и выполненные с возможностью направлять проволоку, подаваемую посредством блока подачи; скручивающий блок, выполненный с возможностью скручивать проволоку, направляемую посредством первой направляющей и второй направляющей, и подвижную направляющую часть, выполненную с возможностью изменять упомянутый интервал с первого расстояния на второе расстояние, меньшее первого расстояния, при этом вторая направляющая поддерживается таким образом, что она является перемещаемой в направлении к и от первой направляющей, и операция обвязки выполняется, когда определяется, что вторая направляющая перемещается во второе положение, в котором упомянутый интервал представляет собой второе расстояние. 11 з.п. ф-лы, 49 ил.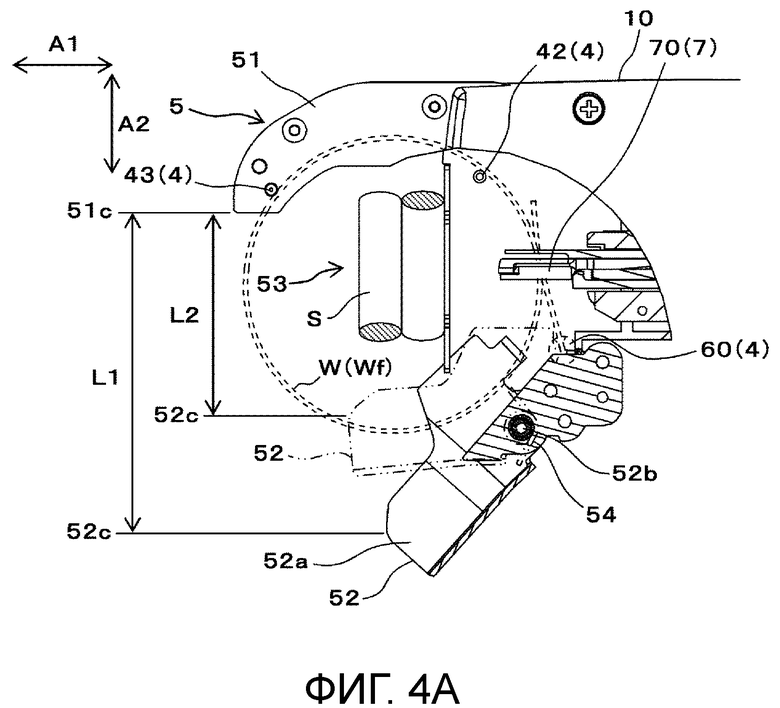
1. Обвязочная машина, содержащая:
- образующую корпус часть (10);
- блок (3) подачи, выполненный с возможностью подавать проволоку (W);
- первую направляющую (51, 51B) и вторую направляющую (52), проходящие в первом направлении (A1) от концевого участка на одной стороне образующей корпус части, размещаемые с интервалом, в котором вставляется обвязываемый объект (S), во втором направлении (A2), ортогональном к первому направлению, и выполненные с возможностью направлять проволоку, подаваемую посредством блока подачи;
- скручивающий блок (7), выполненный с возможностью скручивать проволоку, направляемую посредством первой направляющей и второй направляющей; и
- подвижную направляющую часть (9A), выполненную с возможностью изменять упомянутый интервал с первого расстояния (L1) на второе расстояние (L2), меньшее первого расстояния,
при этом
вторая направляющая поддерживается таким образом, что она является перемещаемой в направлении к и от первой направляющей, и
операция обвязки выполняется, когда определяется, что вторая направляющая перемещается во второе положение, в котором упомянутый интервал представляет собой второе расстояние.
2. Обвязочная машина по п.1, в которой скручивающий блок имеет зацепляющую часть (70), с которой проволока зацепляется, и
- при этом, когда упомянутый интервал становится вторым расстоянием, проволока, подаваемая посредством блока подачи, направляется в зацепляющую часть посредством первой направляющей и второй направляющей.
3. Обвязочная машина по п.1, дополнительно содержащая регулирующую часть (4), выполненную с возможностью задавать тракт (Wf) подачи проволоки посредством загиба проволоки, подаваемой посредством блока подачи, так что он идет вокруг обвязываемого объекта, вставленного между первой направляющей и второй направляющей,
- при этом, когда упомянутый интервал становится вторым расстоянием, первая направляющая и вторая направляющая позиционируются на тракте подачи проволоки, заданном посредством регулирующей части (4).
4. Обвязочная машина по п.1, в которой первая направляющая поддерживается таким образом, что она является перемещаемой в направлении к и от второй направляющей.
5. Обвязочная машина по п.3, в которой регулирующая часть предусмотрена в первой направляющей.
6. Обвязочная машина по одному из пп.1-5, в которой подвижная направляющая часть имеет контактную часть (91A), с которой входит в контакт обвязываемый объект, вставленный между первой направляющей и второй направляющей, и
- при этом, когда обвязываемый объект входит в контакт с контактной частью, подвижная направляющая часть изменяет упомянутый интервал с первого расстояния на второе расстояние.
7. Обвязочная машина по одному из пп.1-5, в которой подвижная направляющая часть имеет контактную часть (91A), с которой входит в контакт обвязываемый объект, вставленный между первой направляющей и второй направляющей, и смещающую часть (93A), выполненную с возможностью перемещаться по мере того, как обвязываемый объект входит в контакт с контактной частью, и
- при этом смещающая часть перемещается таким образом, что подвижная направляющая часть изменяет упомянутый интервал с первого расстояния на второе расстояние.
8. Обвязочная машина по п.6, в которой подвижная направляющая часть выполнена с возможностью вращаться по мере того, как контактная часть перемещается в первом направлении.
9. Обвязочная машина по п.6, в которой подвижная направляющая часть выполнена с возможностью линейно перемещаться по мере того, как контактная часть перемещается в первом направлении.
10. Обвязочная машина по п.6, в которой контактная часть предусмотрена на каждой из обеих сторон виртуальной плоскости, содержащей тракт подачи проволоки.
11. Обвязочная машина по п.10, в которой контактная часть предусмотрена на каждой из обеих сторон первой направляющей или второй направляющей в третьем направлении.
12. Обвязочная машина по одному из пп.1-6, дополнительно содержащая:
- блок (101) обнаружения, выполненный с возможностью обнаруживать обвязываемый объект, вставленный между первой направляющей и второй направляющей, и
- блок (100C) управления, который изменяет интервал с первого расстояния на второе расстояние, когда блок обнаружения обнаруживает обвязываемый объект.
| JPH 07275983 A, 24.10.1995 | |||
| JPH 08246675 A, 24.09.1996 | |||
| US 5694983 A, 09.12.1997 | |||
| Способ получения 1,3,5,7-тетраметил-2,4,6,8,9,10-гексатиаадамантана | 1988 |
|
SU1641822A1 |
| Вязальная машина | 1969 |
|
SU311515A1 |

