Настоящее изобретение относится к системе и способу контроля состояния тормозной системы, в частности, но не исключительно, контроля использования тормозной системы, например, самолета, для определения состояния тормозной системы. Настоящее изобретение также относится к системе, в которой работает программа эксплуатации тормозной системы и система начисления счета пользователя тормозной системы.
В тормозных системах самолетов обычно используют углерод, углеродные диски. Срок службы углерод-углеродных тормозов обычно определяют по количеству посадок с данными тормозными дисками до их замены, при этом количество посадок обычно регистрируют для технического обслуживания и в соответствии с требованиями летной годности. Показатель ожидаемого количества посадок обычно используют как гарантию минимального срока службы тепловых пакетов, которые поставляются на коммерческой основе, или для вычисления стоимости посадки с торможением (CBL), в случаях, когда тепловые пакеты тормозов сдаются в аренду операторам производителями тормозов.
Тормоза самолета, в частности, тормоза, в которых в качестве фрикционных дисков в многодисковых компоновках используются углерод-углеродные композитные материалы, могут получать повреждения, которые, в свою очередь, могут влиять на рабочие характеристики тормозов при обслуживании. Текущий осмотр тормозов между запланированными этапами обслуживания включает проверку состояния шпильки износа, по состоянию которой определяют, что остается достаточное количество материала для обеспечения безопасного поглощения тепловым пакетом энергии торможения, без перегрева и повреждения теплового пакета и окружающих компонентов. Проверка состояния шпильки износа показывает только момент, когда срок службы теплового пакета подходит к концу из-за полного износа, и не позволяет определять другие проблемы, которые могут неблагоприятно сказываться на рабочих характеристиках тормозов, такие как разлом дисков, потери ведущих шипов, окисление, неравномерный износ дисков, прихватывание тормоза или загрязнение.
Для определения состояния и прогнозирования срока службы углерод-углеродных тормозных дисков желательно получать точные данные. Это важно для обеспечения безопасности, а также по коммерческим причинам. Например, высокая стоимость углерод-углеродных тормозных дисков и время реализации заказа и поставок, составляющее порядка шести месяцев, делает снабжение запасными частями важным моментом, который требуется учитывать для минимизации складских запасов и, таким образом, оборотного капитала.
Тормозную систему в самолетах используют в пяти ситуациях: при посадке, при рулежке, на стоянке, во время торможения перед убиранием шасси и, очень редко, при отмене взлета. Все это важно учитывать, поскольку, например, было определено, что скорость износа углеродных тормозов в значительной степени зависит от количества включении тормозов, при которых происходит или не происходит рассеивание энергии во время работы. Таким образом, степень износа во время притормаживания при выруливании с холодными углерод-углеродными тормозами аналогична степени износа при полной посадке.
Известный уровень техники, в области систем контроля состояния тормозной системы включает публикацию DE-A-3433236, в которой описано применение устройства контроля включения тормозной системы, предназначенное для использования в автомобиле или в самолете. Это устройство содержит диаграммный самописец, который записывает кривую, зависящую от сигнала преобразователя, измеряющего усилие, передаваемое на тормоза, например, прикладываемое гидравлическое давление, и инерционного датчика, который измеряет действительное замедление автомобиля или самолета. Однако это предложение имеет несколько недостатков. Например, в тормозной системе самолета может требоваться прикладывать давление на уровне порядка 150 фунтов на квадратный дюйм (10 бар) только для того, чтобы устранить зазор между тормозными дисками еще до какого-либо эффекта торможения. При этом относительно небольшое увеличение прикладываемого давления может быть достаточным для получения требуемого эффекта притормаживания при выруливании. Во многих существующих системах обеспечивается недостаточно точное измерение давления в тормозной системе, или датчики давления отсутствуют вообще, что означает, что потребуется модификация этих систем, если давление в тормозной системе будет использоваться в качестве показателя определения степени использования тормозов. Применение внутреннего датчика не позволяет идентифицировать все виды проводимых операций торможения, например проверку тормозной системы при разгоне двигателя, которая может быть ошибочно идентифицирована как использование тормозной системы, замедление, вызванное лобовым сопротивлением, воздействие ветра или обратного дросселирования двигателей как использование тормозной системы.
В контексте тормозной системы, такой как тормозная система колес самолета, известно измерение физических параметров, связанных с эффектом торможения при работе системы с целью регулирования этого эффекта.
Например, в тормозной системе самолета с гидравлическим сервоприводом (автотормоз) может измеряться степень нажатия пилотом педали тормоза, то есть сигнал требования торможения, и полученное в результате гидравлическое давление прикладывается к тормозам так, что оно регулируется до значения, соответствующего требованию торможения. В более сложных примерах систем торможения измеряют дополнительные параметры. Так, в публикации US № 4 790 606 автора Reinecke описано устройство, предназначенное для измерения и/или регулирования усилия торможения, причем это устройство включает датчик замедления, датчик температуры тормозов, датчик массы и средство вычисления, в котором используются сигналы этих датчиков для получения величины измерения и/или регулировки. В публикации US №4 592 213 автора Rapoport описана система торможения, содержащая датчики температуры, трения и давления и средство для сравнения сигналов этих датчиков с заранее заданными значениями, для обеспечения соответствующей автоматической работы тормозной системы. В публикациях US № 4 572 585 автора Guichard и US № 4 043 607 авторов Signorelli и др., также описаны системы такого рода.
В некоторых случаях предусмотрена сигнализация избыточно неэффективного торможения, например, в виде сигнала предупреждения пилота самолета.
В соответствии с настоящим изобретением предложена система и способ контроля состояния тормозной системы в соответствии с приложенной формулой изобретения.
Настоящее изобретение может применяться на существующих или новых самолетах при добавлении к тормозам отдельного блока с собственным питанием или с внешним источником питания от систем самолета. В качестве альтернативы, оборудование и/или программное обеспечение управления тормозной системой может быть модифицировано для установки системы в соответствии с настоящим изобретением в существующие и новые самолеты.
Хорошо известны способы записи данных и загрузки такой записанной информации. Информация об использовании тормозов может загружаться в любое удобное время, например, во время технического обслуживания самолета. Данные могут считываться непосредственно с визуального дисплея или загружаться в портативное устройство для последующего анализа. В качестве альтернативы блок записи может сниматься для анализа в другом месте. Информация может также записываться, например, на карту памяти, которую легче снимать, чем весь блок.
В системе, в соответствии с настоящим изобретением, может использоваться применяемый в настоящее время блок управления противоскольжением (ASCU) путем установки дополнительных алгоритмов в существующее программное обеспечение, или с помощью отдельного блока, который может быть установлен либо на тормозах, либо где-нибудь внутри самолета. В этих алгоритмах могут использоваться различные параметры (гидравлическое давление, температура, скорость колес, крутящий момент, отклонение педали, износ тормозов) для определения момента, когда происходит включение тормозов и, возможно, вида такого включения. Записанная информация может быть загружена для анализа использования тормозов, и эта информация может использоваться для технического обслуживания, а также для организации снабжения запасными частями и/или начисления счетов.
Информация, загружаемая из системы, может использоваться для построения подробной картины использования тормозов в течение определенного периода времени для каждой авиакомпании, эксплуатирующей данный тип самолета. Эта информация может затем использоваться для точного прогнозирования требуемого технического обслуживания и момента замены тепловых пакетов. Это позволяет организовать более точное снабжение запасными тепловыми пакетами, уменьшить запасы на складах авиакомпании и производителя тормозов этих дорогостоящих углеродных дисков и, таким образом, снизить эксплуатационные затраты.
Информация, загружаемая из системы, может использоваться для получения более надежного значения гарантийного срока службы тормозов путем учета износа при различных ситуациях использования тормозов. В качестве альтернативы, эта информация может использоваться для схемы оплаты CBL для учета всех видов торможений, а не только посадок, с начислением оплаты на каждое использование тормозов, в зависимости от вида использования и соответствующего износа.
Система контроля может представлять собой дополнительный блок, устанавливаемый на самолете, или она может быть установлена в существующую систему контроля и управления тормозов.
Скопление самолетов во многих аэропортах приводит к необходимости многократного использования тормозов при рулежке, когда рассеивается относительно небольшая энергия по сравнению с энергией, рассеиваемой при пробежке во время посадки. Такое многократное использование тормозов во время притормаживания при выруливании может существенно снизить ожидаемый срок службы теплового пакета углеродного тормозного диска. Это может привести к дополнительным затратам компаний-операторов самолета, когда не обеспечивается ожидаемый срок службы тормозов. В случаях, когда операторы платят за использование системы торможения на основе схемы CBL, начисления для авиакомпании, у которой в среднем выполняется только 2 цикла притормаживания при выруливании при каждой последовательности посадки, будут производиться по такому же тарифу CBL, что и для авиакомпании, работающей в более загруженных аэропортах, в которых в среднем требуется выполнять 20 притормаживаний при последовательности посадки. Если бы информация о виде использования тормозов была записана, могла бы быть построена более подробная картина использования системы торможения самолета, для обеспечения возможности управления запасами запасных частей и разработки схемы калькуляции цен, отражающей использование тормозов. Знание факторов, влияющих на срок службы тормозов, также может использоваться авиакомпаниями для обучения пилотов технике торможения, обеспечивающей повышенный строк службы тормозов и снижение эксплуатационных расходов.
Когда самолет неподвижно стоит на месте, относительное вращательное движение контактирующих фрикционных поверхностей отсутствует и, поскольку включение тормозов не приводит к износу углеродных поверхностей, может быть принято решение, что не требуется регистрировать такие включения тормозов. Разница между включением тормозов при остановке и при движении самолета может распознаваться системой, которая учитывает скорость самолета в момент включения тормозов или учитывает преобразование кинетической энергии в тепло. Если скорость самолета, измеряемая, например, по сигналу от преобразователя скорости колеса, будет ниже определенного порогового значения, состояние самолета может рассматриваться как неподвижное, и включение тормозов не будет зарегистрировано/записано. Если скорость самолета будет равна или выше порогового значения, включение тормозов будет записано для учета в информации об использовании тормозов.
При включении тормозов энергия торможения рассеивается через тормоза в виде тепла. Поэтому теоретически возможно измерять даже незначительное включение тормозов путем учета изменений температуры тормозов. Датчики температуры обычно устанавливают в блоки тормозов, так что можно измерять включение тормозов в системе без модификации существующих тормозов или при незначительной их модификации. Сигнал температуры тормозов может обрабатываться для получения надежных показателей всех включений тормозов.
Как указано выше, тормоза самолета могут включаться в пяти различных ситуациях: при посадке, при выруливании, в неподвижном состоянии, во время торможения перед уборкой шасси и, иногда, при отмене взлета. Каждый вид включения тормозов осуществляется в соответствующем диапазоне входных сигналов, например, давления рабочей среды тормозной системы, степени нажима пилотом педали или скорости колес, и при каждом типе включения тормозов должен получаться предсказуемый отклик тормозной системы, выражаемый в виде выходных сигналов, таких, как, например, повышение температуры теплового пакета или генерируемый крутящий момент.
Входной сигнал требования торможения отслеживается и обрабатывается для прогнозирования предполагаемых выходных сигналов тормозной системы. Реально получаемые выходные сигналы также контролируют и сравнивают с ожидаемыми или прогнозируемыми выходными сигналами для получения информации о состоянии тормозов. Такая информация может использоваться для прогнозирования срока службы тормозов или для обнаружения проблем, которые могут привести к незапланированному техническому обслуживанию или к досрочной замене теплового пакета тормозов.
Предпочтительно, система прогнозирует ожидаемые выходные сигналы тормозной системы по измеряемым входным сигналам и сравнивает ожидаемые выходные сигналы с измеренными сигналами. Когда происходит изменение между ожидаемыми и измеряемыми выходными сигналами, система определяет, является ли такое изменение результатом дефекта в состоянии привода тормозов или теплового пакета тормозов.
Такая система контроля состояния тормозов может использоваться в системе управления торможением с добавлением, в случае необходимости, аппаратных или программных средств. В качестве альтернативы, контроль может осуществляться с помощью отдельного блока контроля условий, устанавливаемого на самолете, который принимает сигналы от аппаратных компонентов системы управления тормозами и дополнительных аппаратных компонентов, если такие необходимы.
Система может включать средство для предупреждения пилота или наземного персонала при обнаружении неисправности в тормозной системе для обеспечения возможности технического обслуживания при первой возможности, для минимизации риска ущерба безопасности самолета и для повышения технической готовности самолета. Для предупреждения пилота о каких-либо неисправностях в кокпите может быть установлено соответствующее устройство дисплея. Предупреждение для наземного персонала об обнаруженных отказах может отображаться в системе управления тормозами или в отдельной системе контроля состояния тормозов при выполнении предполетных проверок или по сигналу на наземную базу.
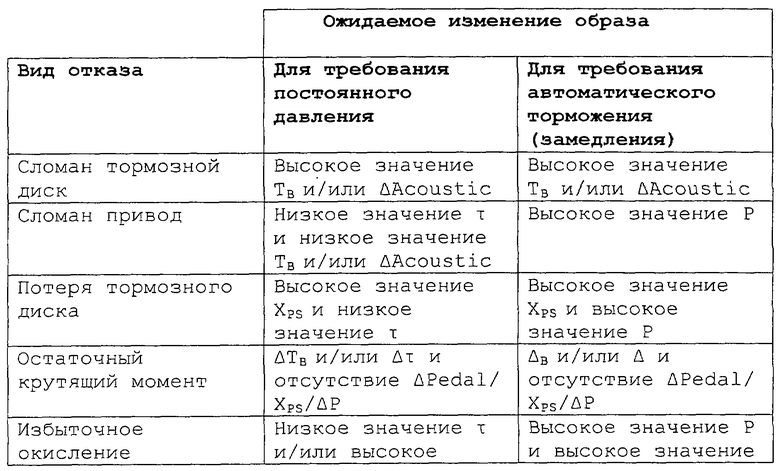
Контролируемые и обрабатываемые сигналы составляют тормозной "образ", из которого может быть получена информация о состоянии тормозов, включая, но не ограничиваясь, степень нажатия пилота на педаль, давление рабочей жидкости в тормозной системе, скорость колеса, включение противоскользящей системы, температура тормозов, крутящий момент тормозов, износ тормозов, количество включений тормозов, время включения тормозов, вибрация, ускорение шасси тормозов, акустический образ, запах тормозов. Кроме того, дополнительная информация может быть получена от других систем самолета, такая, например, как вес самолета. Некоторые из этих сигналов могут рассматриваться как входные сигналы для тормозной системы и отражают вид включения тормозов, требуемого пилотом, или системой автоматического торможения, например, при посадке или при притормаживании при рулежке. Такие входные сигналы включают, но не ограничиваются, степень нажатия пилота на педаль или требование включения автоматического торможения, давление рабочей жидкости в тормозной системе, время включения тормозов и скорость колеса. Другие контролируемые сигналы могут рассматриваться как выходные сигналы, получаемые при включении тормозов, и в зависимости от состояния тормозов. Такие выходные сигналы включают, но не ограничиваются крутящий момент тормозов, температура тормозов, вибрация, акустический образ, ускорение и запах тормозов.
Новый тепловой пакет тормозов с полным количеством изнашиваемого материала и всеми шпильками привода на месте, имеет максимальное количество фрикционных поверхностей при работе во время включения тормозов. Кроме того, масса теплового пакета при этом максимальна и обеспечивает наилучшее поглощение тепла, вырабатываемого при включении тормозов. При обработке комбинации некоторых или всех измеряемых входных сигналов, включая, но не ограничиваясь, скорость колеса, степень нажатия пилотом на педаль тормоза или требование на включение системы автоторможения, давление рабочей жидкости в тормозной системе и включение противоскользящей системы, может определяться ряд ожидаемых выходных сигналов. Такие выходные сигналы или образ тормозной системы, но не ограничивается, крутящий момент тормозов, температуру тормозов, акустический образ, вибрацию, ускорение и запах тормозов.
По мере изменения состояния теплового пакета контролируемые выходные сигналы или образ, описанный выше, будут изменяться для любого заданного набора входных сигналов тормозной системы.
Такая система также позволяет отслеживать другие аспекты шасси самолета для обнаружения проблем, связанных с колесами или тормозами. Такой контроль может включать, например, температуру подшипника колеса, температуру покрышки или давление в колесе.
Рассмотрим простой и часто возникающий сценарий, когда при износе теплового пакета в нем остается меньше материала для поглощения рассеиваемой энергии при любом заданном включении тормозов. Это приводит к повышению температуры теплового пакета выше значения, отмечаемого для нового теплового пакета. Чем выше степень износа, тем выше получается подъем температуры теплового пакета.
При рассмотрении другого сценария, поломка всех ведущих шипов на одном диске ротора приведет к потере двух фрикционных поверхностей. В таком случае, при сравнении с тормозами со всеми работающими фрикционными поверхностями, те же входные сигналы системы управления тормозов, включая требование пилота на торможение, давление рабочей жидкости в системе торможения, время включения тормозов, скорость колеса и включение противоскользящей системы, приведет к получению меньшего крутящего момента тормозов, меньшей степени замедления и меньшему повышению температуры. В качестве альтернативы, если работает автоматическая система торможения, регулирующая замедление, она будет действовать так, чтобы регулировать замедление в соответствии с заданным пилотом требованием, управляя давлением рабочей жидкости в системе торможения. В результате при наличии сломанных ведущих шипов диска ротора потребуется увеличение давления рабочей жидкости в системе торможения.
Далее приводится описание наилучших вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает упрощенную схему одного варианта воплощения системы в соответствии с настоящим изобретением;
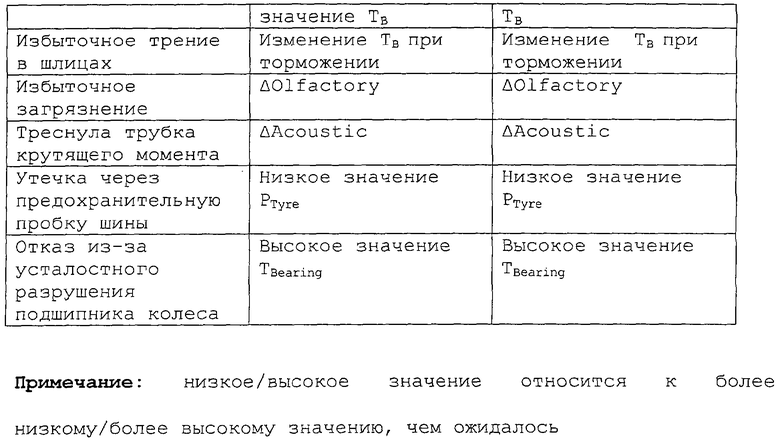
фиг.2 - упрощенную схему другого варианта воплощения системы в соответствии с настоящим изобретением;
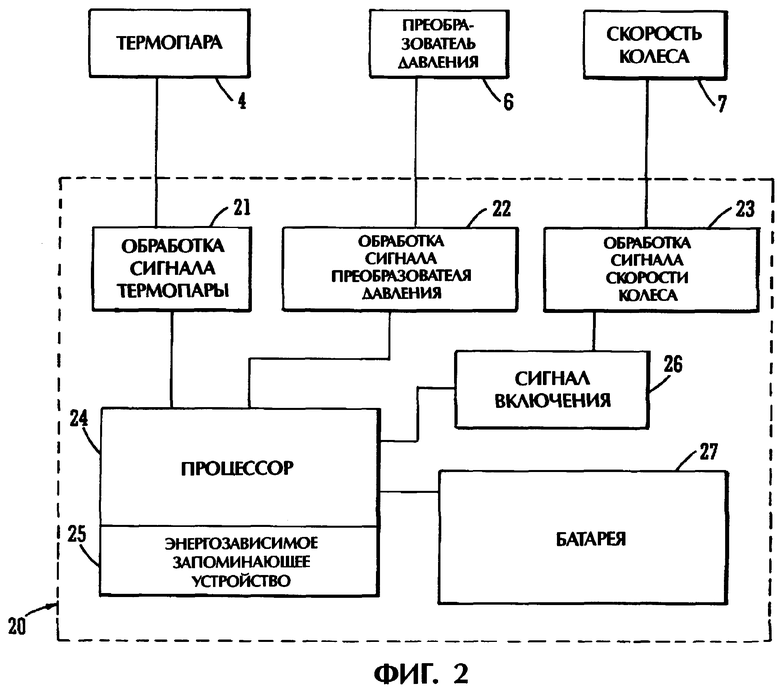
фиг.3 - график, связанный с первой последовательностью динамометрических испытаний для конкретной тормозной системы самолета с углеродными дисками с температурой Т, представленной в градусах С по оси ординат, и временем S в секундах по оси абсцисс, который изображает (А) температуру, представленную в виде сигнала датчика температуры, установленного на тормозах, и (В) тот же сигнал после фильтрации;
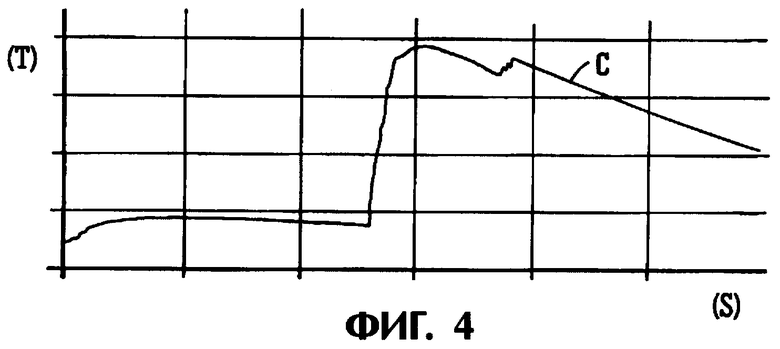
Фиг.4 - график, аналогичный представленному на фиг.3, на котором показана только кривая (С) отфильтрованного сигнала для другой последовательности динамометрических испытаний;
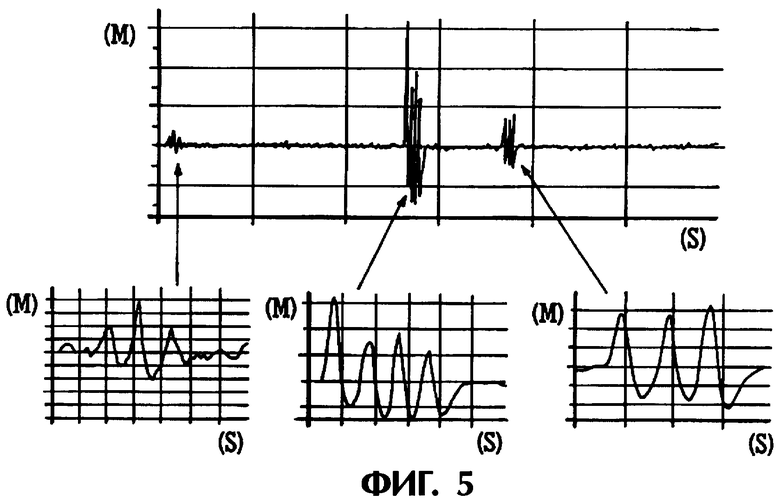
Фиг.5 - основной график зависимости амплитуды М от времени Т для сигнала, показанного на фиг.4, после цифровой обработки с использованием компьютера, и три диаграммы, на которых показаны, с увеличением, соответствующие детали основного графика.
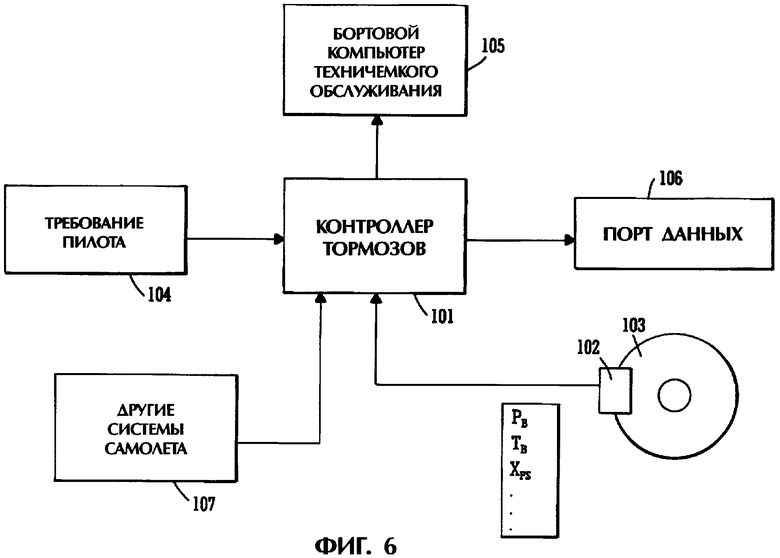
Фиг.6 - упрощенную схему системы контроля состояния тормозной системы.
Система, показанная на фиг.1, используемая для колеса 1 самолета (не показано), содержит узел 2 многодисковых углерод-углеродных тормозов с гидравлическим механизмом 3 привода. Привод механизма 3 осуществляется по линии 5 с использованием гидравлической системы, содержащей ASCU (Agent set control unit - блок управления устройствами-агентами), как известно в данной области техники. Блок 4 измерения температуры тормозов, обычно в виде термопары, расположен рядом с узлом торможения. Для регистрации использования тормозов выходной сигнал термопары поступает на блок 10 через интерфейс 11, проходя на процессор 12, где известным образом осуществляется обработка сигнала с использованием алгоритма определения включения тормозов. Выходные данные процессора записывают в блок 13 энергозависимого запоминающего устройства (NVM), информация с которого может быть загружена через соответствующий порт доступа (не показан), установленный в блоке 10 или на внешней стенке блока.
Для того чтобы блок мог работать независимо от других систем управления самолета, в блоке 10 установлено средство 14 питания (батарея), предназначенное для питания блока. В течение большей части времени эксплуатации блока самолет стоит неподвижно или находится в состоянии полета, поэтому для экономии энергии батареи, и, следовательно, для увеличения времени работы блока в нем установлен переключатель 16 наклона и датчик 15 движения. Переключатель наклона разрывает линию питания от батареи к процессору при убранном шасси, а датчик движения используется для переключения процессора в режим ожидания во время периодов неактивности.
Как показано на фиг.2, выходной сигнал с помощью термопары 4, преобразователя 6 датчика давления тормозов и преобразователя 7 скорости колеса снимают с колеса самолета, с тормозов и системы включения тормозов (не показана) такого типа, как представлено на фиг.1. Эти выходные сигналы поступают в процессор 24 блока 20 через интерфейсы 21, 22 и 23 формирования сигнала. Сигналы обрабатывают с использованием определенных алгоритмов для определения факта включения тормозов и соответствующего вида торможения. Информация с выхода процессора записывается в блоке 25, данные которого могут быть загружены через соответствующий порт доступа (не показан), установленный внутри блока 20 или на внешней стенке блока. Записанные данные, загружаемые из блока, представляют не только количество включений тормозов, но также и вид включения тормозов, например, по ним можно различать притормаживание при выруливании и торможение при посадке.
Для продления срока службы батареи 27 также может быть установлен запрос 26 запуска после состояния "ожидания", при формировании которого могут использоваться функции выключателя наклона и/или датчика движения, как описано для системы по фиг.1.
Системы по фиг.1 и фиг.2 представляют отдельные блоки, устанавливаемые на самолет для контроля использования тормозов, но обработка сигналов, которая будет подробно описана ниже, также может быть внедрена в существующие блоки управления тормозной системы при соответствующей модификации аппаратных и/или программных средств.
На фиг.3 показан сигнал температуры датчика контроля температуры тормозов (BTMS) в системах, описанных выше, где кривая А представляет случай трех притормаживаний при рулежке, выполняемых на динамометре с использованием углеродных тормозов реактивного самолета местных авиалиний. На кривой показаны моменты повышения температуры TR1, TR2 и TR3 приблизительно на 2,5°С, но из-за шума, создаваемого помехами от другого оборудования, форму кривой становится трудноразличимой. Система, таким образом, включает средство для фильтрации, дифференциации и усиления сигнала.
Сигнал В по фиг.3 представляет собой сигнал, обработанный фильтром четвертого порядка. Хотя представленная кривая имеет теперь гладкий вид, трудно определить отдельные повышения температуры, вызванные каждым включением тормозов, так что сигнал подвергают дополнительной обработке путем двойного дифференцирования и усиления. С помощью соответствующей компьютерной программы выполняется требуемый цифровой алгоритм, в результате чего принимается решение, были ли включены тормоза или нет, и если они были включены, такое включение тормозов регистрируется. На фиг.4 показан выходной сигнал при полной последовательности динамометрических испытаний, включающих три притормаживания при рулежке, одну полную посадку, после которой следуют три притормаживания при рулежке, кратковременный период покоя и затем еще три притормаживания при рулежке. На фиг.5 показаны те же выходные сигналы после обработки с использованием алгоритма. Пики, показанные на фиг.5, выходящие за пределы заранее определенной амплитуды, указывают на включение тормозов. Пики, показанные на фиг.5 позволяют четко идентифицировать все отдельные моменты включения тормозов в соответствии с программой динамометрических испытаний. Работа динамометрического испытания сопоставлялась с данными, полученными при испытаниях самолета. При испытаниях, после обработки сигнала температуры, было определено, что надежные показания включения тормозов могут быть получены даже при изменении температуры менее чем на 1°С.
Такой анализ выходного сигнала в большей степени подходит к одним типам самолетов, чем к другим, в зависимости от наличия BTMS (датчика контроля температуры) в тормозной системе. Оптимальное положение для датчика контроля температуры зависит от конструкции соответствующей тормозной системы. В некоторых тормозных системах оптимальное положение может быть близким к центру теплового пакета. В общем, чем ближе датчик температуры к оптимальному положению в тормозном блоке, тем более чувствительным будет определение температуры во время включения тормозов. Например, чувствительность при измерении температуры в центре блока тормозов из четырех роторов, может быть в несколько раз выше, чем в других местах блока.
Обработанные данные о температуре могут быть записаны отдельно для использования в качестве показателя количества включений тормозов при использовании такого устройства, как представлено на схеме, представленной на фиг.1, или в комбинации со скоростью колеса и/или давления в тормозной системе, для получения записи подробных данных о виде использования тормозов, например, при притормаживании во время рулежки или при посадке, как показано на фиг.2.
Настоящее изобретение не ограничивается представленным вариантом воплощения. Сигналы могут быть получены и могут обрабатываться с использованием компонентов существующих блоков управления тормозной системы. Температура может определяться или измеряться с использованием других устройства, кроме термопары.
Система, показанная на фиг.6, включает электронный контроллер 101 управления тормозами известного в данной области техники типа, который используется для управления всеми аспектами управления тормозной системой, включая отслеживание запроса пилота на торможение и управление прикладываемым давлением к тормозам в соответствии с запросом пилота, а также определение проскальзывания. Входные сигналы контроллера, соответствующие запросу пилота на торможение передаются с помощью средства 102 отслеживания. Эти входные сигналы включают, но не ограничиваются степень нажатия на педаль и требование на включение давления. Контроллер также отслеживает сигналы от датчиков 103, установленных на колесе и в блоке 104 тормозов, включая, но не ограничиваясь, скорость колеса, температуру, положение статора давления, крутящий момент тормозов, давление рабочей жидкости в системе тормозной системы. Сигналы датчиков, установленных в других узлах шасси, таких как, например, шины и ось колеса, также могут использоваться для отслеживания состояния определенного набора компонентов и узлов, которые входят в узел шасси самолета. Кроме того, такая информация, как вес самолета, может вводиться в контроллер из одной или нескольких других систем самолета (на чертежах представлены блоком 107).
Контроллер анализирует сигналы, относящиеся к требованию пилота и тормозной системе, для получения оценочного образа (совокупность различных данных) рабочих характеристик тормозов, которая представляет степень работоспособности тормозов. Такой образ работоспособности тормозов можно сравнивать с оценкой для нового теплового пакета. В качестве альтернативы, через некоторый период времени может быть построена запись рабочего состояния тормозов, которая позволяет проводить статистический анализ, представляющий тенденции в образе рабочих характеристик тормозов, и позволяет контроллеру прогнозировать ожидаемый образ для данного включения тормозов. Когда происходят отклонения от ожидаемого образа, контроллер позволяет идентифицировать возможные проблемы с тормозами, которые могли быть причиной такого изменения.
Сигналы, соответствующие идентифицированным проблемам, затем могут быть переданы в бортовой компьютер 105, который может выдавать сигналы предупреждения для экипажа или наземного обслуживающего персонала. В качестве альтернативы или дополнительно, данные с контроллера могут загружаться через порт передачи данных для использования наземным персоналом при текущем техническом обслуживании или при выполнении предполетных проверок. Порт 106 также может использоваться поставщиком тормозов для загрузки информации об использовании тормозной системы, включая количество включений тормозов, и виды включения тормозной системы. Такая служебная информация может использоваться сама по себе или в комбинации с данными контроля условий для прогнозирования срока службы тормозов и/или для коммерческих целей.
Такой контроллер контроля тормозов также позволяет контролировать функции автоматического торможения тормозной системы.
В системе, показанной на фиг.6, степень износа теплового пакета оценивается путем отслеживания сигнала требования пилота на включение тормозов, и сигналов скорости колеса, давления рабочей жидкости тормозной системы и температуры теплового пакета. Для заданного набора рабочих условий, например, требования на включение тормозов и скорости, контроллер производит сравнение измеряемого повышения температуры с ожидаемым повышением температуры. Разница между этими значениями указывает на степень износа теплового пакета, при этом чем больше степень износа, тем больше повышается температура. Кроме того, в контроллере задано пороговое значение разности температур для любого требования на включение торможения, при этом пороговое значение представляет разность между ожидаемой температурой для нового теплового пакета и полностью изношенного теплового пакета. По мере того, как сигнал будет приближаться к пороговому значению разности температур, экипаж самолета или наземный персонал получат предупреждение о том, что тепловой пакет приближается к пределу износа. В качестве альтернативы, контроллер или бортовой компьютер технического обслуживания может посылать сигнал с использованием известной технологии передачи данных, например, по каналу спутниковой связи, на базу технического обслуживания авиакомпании, которой принадлежит данный самолет, или на базу поставщика тормозов так, чтобы могли быть запланированы соответствующие меры по техническому обслуживанию и были доставлены запасные части. Такие сигналы также могут регулярно посылаться для внешнего контроля состояния тормозов или только один раз, когда степень износа достигнет заранее определенного значения для предупреждения о том, что требуется техническое обслуживание или поставка запасных деталей. Временное расписание передачи таких сигналов должно обеспечивать достаточный запас времени для поставки запасных частей, что, таким образом, позволяет минимизировать запасы на складе и снизить оборотный капитал поставщика тормозов и компании оператора самолета.
Тепловой пакет, кроме износа, может терять массу по другим причинам, например из-за окисления углеродного фрикционного материала, или из-за потери нескольких ведущих шипов. Такие потери массы приводят к большему повышению температуры в образе рабочего состояния тормозов, чем наблюдается при отсутствии дефектов.
Когда снижение массы вызвано потерей ряда приводов в тепловом пакете, это приводит к более резкому повышению температуры во время включения тормозов, по сравнению с повышением температуры, прогнозируемым при статистическом анализе изменения сигнатуры торможения для нескольких остановок в течение определенного периода времени. Степень резкого повышения температуры при включении тормозов может быть тем больше, чем большее количество приводов дисков в тепловом пакете будет исключено из работы.
Оценки массы теплового пакета также могут выполняться по значениям от Xps и (дельта) Т (смотри Таблицу 1). Если эти оценки массы не соответствуют друг другу, можно предполагать определенную степень повреждения, такую, как сломанные приводы или окисление.
Диск, на котором сломаны все приводы, определяется в системе по фиг.6 при отслеживании сигналов, представляющих крутящий момент тормоза, температуру тормоза акустическую сигнатуру тормоза. Если ведущие шипы на роторном диске или диске с двойным статором будут сломаны, это приведет к тому, что тормоз будет иметь на 2 фрикционных поверхности меньше при включении тормозов. Для заданного требования торможения давление в тормозной системе, продолжительности включения тормозов и скорости колеса, соответственно, будет вырабатываться меньший крутящий момент, из-за потери 2 фрикционных поверхностей, в результате чего температура тормозов будет ниже, чем можно было бы ожидать при тех же условиях включения тормозов для теплового пакета со всеми работающими фрикционными поверхностями. Количество нерабочих фрикционных поверхностей в блоке тормоза зависит от степени повреждения теплового пакета. Отклонение крутящего момента и температуры от ожидаемых значений может быть проанализировано для определения количества неработающих фрикционных поверхностей.
При сравнении в условиях автоматического торможения, при наличии сломанных приводов дисков, управление тормозами будет осуществляться так, чтобы обеспечивалось получение заранее заданного крутящего момента торможения, и система будет вырабатывать повышенное давление рабочей жидкости для достижения требуемого крутящего момента. В связи с этим при автоматическом торможении более высокий уровень давление, чем предполагается, будет указывать на то, что на диске сломаны ведущие шипы. Отклонение давления в системе торможения от ожидаемого значения может анализироваться для индикации количества нерабочих фрикционных поверхностей, что указывает на степень повреждения.
В тормозах со сломанными ведущими шипами на диске акустическая сигнатура тормозов при включении тормозов будет отличаться от акустической сигнатуры тормозов с такой же степенью износа с эффективно работающими всеми фрикционными поверхностями. Акустическая сигнатура определяется с помощью микрофона. Сигнал от микрофона поступает на контроллер тормозов для определения изменений ожидаемой сигнатуры.
Другие сценарии, представленные в Таблице 1, могут быть определены и зарегистрированы аналогично, как и сценариях, описанных выше. Сценарии, представленные в Таблице 1, следует рассматривать как иллюстративные примеры определяемого состояния тормозов, и не представляют полный список возможных вариантов.
Вышеприведенные ссылки на запах тормозов относятся к возникновению специфического запаха при определении параметров запаха, возникающего при торможении, с использованием соответствующих преобразователей для обнаружения наличия и/или уровня определенных газов или их комбинаций и/или паров или микрочастиц в устройстве торможения или вокруг него.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА МНОГОКОЛЕСНОГО САМОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 1995 |
|
RU2146625C1 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕСА ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583535C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| СИСТЕМА И СПОСОБ АДАПТИВНОГО ПРИМЕНЕНИЯ ТОРМОЗА И ОБНАРУЖЕНИЯ НАЧАЛЬНОГО СКОЛЬЖЕНИЯ | 2003 |
|
RU2304533C2 |
| СПОСОБ ПРИВОДА КОЛЕС ШАССИ САМОЛЕТА И ШАССИ САМОЛЕТА С ПРИВОДОМ КОЛЕС | 2011 |
|
RU2495792C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНОГО РЕСУРСА ТОРМОЗНЫХ УСТРОЙСТВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2761124C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2017 |
|
RU2723577C2 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| Многодисковый электромеханический тормоз самолета | 2015 |
|
RU2612458C1 |
Изобретение относится к области авиастроения, в частности к тормозным системам самолетов. Система контроля состояния тормозного устройства самолета предназначена для контроля состояния тормозного устройства самолета, содержащего обращенные друг к другу фрикционные поверхности и средство привода, предназначенное для прижатия указанных поверхностей друг к другу. Система контроля выполнена с возможностью определения и регистрации включений тормозного устройства. Система контроля содержит средство, предназначенное для распознавания среди различных включений включения, вызывающие износ, при которых указанные поверхности входят в контакт друг с другом и перемещаются по поверхности друг друга, что вызывает существенный износ этих поверхностей. Система контроля также содержит средство, позволяющее получать информацию о состоянии тормозов в зависимости от указанных включений, приводящих к износу. Способ контроля состояния тормозного устройства самолета заключается в распознавании среди других включений, включения, вызывающие износ, при которых обращенные друг к другу фрикционные поверхности входят в контакт друг с другом и перемещаются по поверхности друг друга, что вызывает существенный износ этих поверхностей. Способ также заключается в получении информации о состоянии тормозов в зависимости от указанных включений, приводящих к износу. Техническим результатом является обеспечение эффективного торможения, а также улучшение технических характеристик устройства. 2 н. и 21 з.п. ф-лы, 6 ил., 1 табл.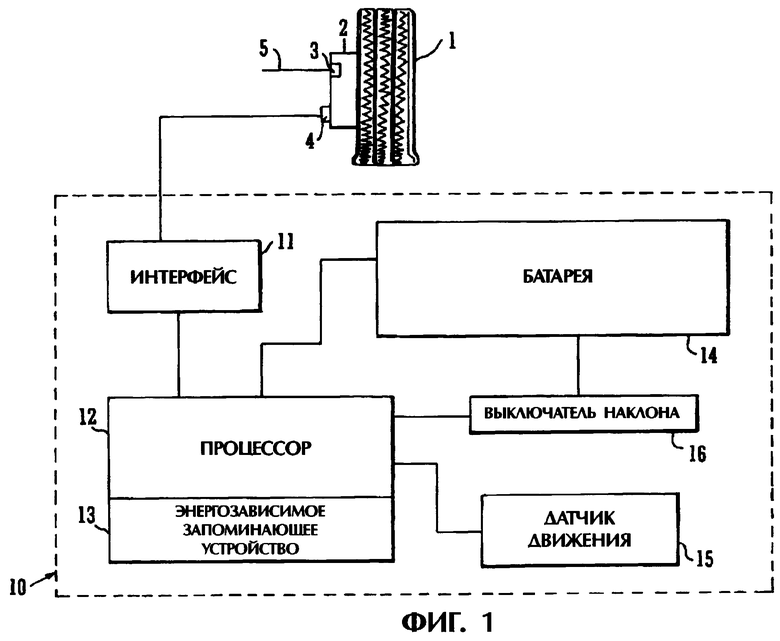
(i) средство приема и записи сигнала, подключенное к средству датчика, предназначенное для приема сигналов и записи их текущего изменения;
(ii) средство обработки сигнала, предназначенное для контроля указанных записей и для идентификации изменений в одном или нескольких сигналах, которые указывают на износ или возможные отказы или на оба этих фактора;
(iii) средство сигнализации, предназначенное для сигнализации об износе и/или возможном отказе.
| US 4790606 А, 13.12.1988 | |||
| US 4712422 A, 15.12.1987 | |||
| DE 3820306 A1, 21.12.1989 | |||
| Система сигнализации и контроля двухконтурной тормозной системы транспортного средства | 1981 |
|
SU1044510A1 |

