Изобретение относится к радиотехнике и может быть использовано для обнаружения электронных устройств с полупроводниковыми элементами, несанкционированно установленными на контролируемом объекте, и, в частности, в нелинейной радиолокации для дистанционного обнаружения приемо-передающих радиоустройств, находящихся в пассивном режиме при отключенном электропитании.
Известен способ обнаружения и идентификации радиопередатчика по его излучению в ближней зоне (патент RU №2364885 С2, МПК G015 11/00. Бюл. №23. 20.08.2009). Однако известный способ не позволяет обнаружить неизлучающее радиоэлектронное устройство.
Для обнаружения неизлучающих радиоэлектронных устройств, внедренных в различные конструкции помещений или размещенных в различных материалах, используется метод нелинейной радиолокации [1, стр.243]. Данный метод основан на способности радиоэлектронных устройств, имеющих в своем составе полупроводниковые элементы, отражать сигнал на частотах второй и третьей гармоники несущей частоты зондирующего сигнала и нелинейно рассеивать в пространстве радиоволны на частотах этих гармоник. В качестве зондирующего излучения, как правило, используется излучение поляризованной электромагнитной волны одночастотного (монохроматического) сигнала. В качестве информативного сигнального признака распознавания электронных устройств используется только одна или две составляющих отраженного сигнала - вторая и/или третья гармоника частоты зондирующего сигнала. Известно, что радиоэлектронные устройства, содержащие полупроводниковые элементы, имеют уровень рассеянной энергии радиоволны на частоте второй гармоники зондирующего сигнала примерно на 20 дБ больше уровня рассеяния энергии на частоте третьей гармоники [2, стр.22].
Однако по этому признаку можно отличить только полупроводниковое электронное устройство от устройства с окисленными точечными металлическими контактами и нельзя распознать тип обнаруженного радиоэлектронного устройства, особенно при размещении искомого устройства среди множества других полупроводниковых устройств, создающих для нелинейной радиолокации помехи принимаемым на частотах второй и третьей гармоники сигналам. Надежность данного признака уменьшается, если на пути распространения зондирующего и рассеянного на частотах второй и третьей гармоники сигналов находятся металлические частично экранирующие отражающие поверхности и поглощающие материалы скрытного размещения устройств.
Таким образом, способ поиска, обнаружения и распознавания искомых радиоэлектронных устройств при наличии на контролируемом объекте, кроме искомого устройства с полупроводниковыми элементами, других полупроводниковых электронных устройств, металлических частично экранирующих и отражающих поверхностей, а также поглощающих материалов скрытного размещения устройств должен базироваться на использовании информативных технических и сигнальных признаков, которые бы позволили надежно определить наличие на контролируемом объекте искомого устройства и достоверно распознать тип обнаруженного устройства.
В изобретении решается задача повышения эксплуатационных возможностей нелинейного радиолокатора для дистанционного поиска, обнаружения и распознавания радиоэлектронных полупроводниковых устройств, несанкционированно установленных на контролируемых объектах и находящихся в неизлучающем режиме, в условиях размещения искомого устройства на объекте поиска, затрудняющих процесс его обнаружения и распознавания.
Известен способ обнаружения и идентификации скрытых электронных установок и устройство для его осуществления (патент США №3992666, МКИ G01R 23/16, публ. 1976 г.). Недостаток этого технического решения заключается в невозможности определения типа скрытой установки.
Из известных технических решений наиболее близким по технической сущности к заявленному является способ выявления и оценки мест закладки в помещениях полупроводниковых устройств для несанкционированного съема речевой и визуальной информации, патент RU №2257012 С1, МПК Н04М 1/68, G01S 13/02, публ. 20.07.2005 г.
Известный способ поиска, обнаружения и распознавания электронных устройств с полупроводниковыми элементами заключается в последовательном сканировании поверхности контролируемого объекта нелинейным радиолокатором, фиксировании и обработке в ПЭВМ полученных от нее электромагнитных откликов, определении местонахождения устройства.
Известный способ позволяет при выполнении последовательного электромагнитного сканирования обследуемой поверхности нелинейным радиолокатором, осуществляемого в непосредственной близости от нее, определить факт наличия внедренных в поверхность электронных устройств. Основным недостатком известного способа является невозможность определения типа обнаруженных электронных устройств. Объясняется это тем, что в процессе сканирования частота сканирующего сигнала не изменяется, а поэтому в откликах сигналов, отраженных на частотах второй и третьей гармоники зондирующего сигнала, отсутствуют резонансные изменения их уровней, что не позволяет определить диапазон рабочих частот обнаруженного устройства, а следовательно, и его тип, тем более при отсутствии или недостаточности априорной информации об искомом устройстве. Кроме того, при использовании известного способа дальность обнаружения устройства невелика, так как нелинейный элемент при облучении его полем зондирующего сигнала работает в режиме слабого взаимодействия, а мощность излучения зондирующего одночастотного сигнала не изменяется в процессе сканирования.
Технический результат заявленного способа заключается в повышении надежности обнаружения и достоверности распознавания электронных устройств с полупроводниковыми элементами, а также увеличении дальности обнаружения.
Для решения поставленной задачи с достижением указанных технических результатов в известном способе поиска, обнаружения и распознавания электронных устройств с полупроводниковыми элементами, заключающемся в последовательном сканировании поверхности контролируемого объекта нелинейным радиолокатором, фиксировании и обработке в ПЭВМ полученных от нее электромагнитных откликов, определении местонахождения устройства, согласно изобретению при сканировании обследуемую поверхность контролируемого объекта облучают электромагнитным полем импульсного излучения монохроматического зондирующего сигнала, частоту которого изменяют поочередно в пределах трех диапазонов частот, соответственно находящихся ниже рабочего диапазона частот искомого устройства, в рабочем диапазоне частот искомого устройства, который априори известен, и выше рабочего диапазона частот искомого устройства, синхронно с облучением обследуемой поверхности контролируемого объекта полем зондирующего сигнала осуществляют прием отраженных сигналов вторых гармоник, образованных в каждом диапазоне частот в результате нелинейных преобразований зондирующего сигнала на полупроводниковых элементах высокочастотных трактов искомого устройства, при одинаковой мощности излучения зондирующих сигналов, которую устанавливают в каждом диапазоне частот излучения зондирующего сигнала, одновременно измеряют уровни принимаемых сигналов вторых гармоник импульсного излучения зондирующих сигналов, которые вместе с установленными мощностями излучения зондирующих сигналов отображают на экране ПЭВМ и индикаторной панели блока управления радиолокатором, выбирают взаимную ориентацию в пространстве антенн зондирующего сигнала радиолокатора и обследуемой поверхности контролируемого объекта, при которой уровни принимаемых сигналов вторых гармоник максимальны, фиксирует уровни принимаемых сигналов вторых гармоник зондирующих сигналов, выделяют из них максимальный уровень сигналов второй гармоники, устанавливают соответствующую ему частоту зондирующего сигнала импульсного излучения, по которой судят о наличии на контролируемом объекте электронного устройства с полупроводниковыми элементами и его рабочем диапазоне частот, а по направлению ориентации электрической оси антенны зондирующего сигнала установленного диапазона частот локализуют зону местонахождения устройства, затем повторно выполняют сканирование поверхности контролируемого объекта нелинейным радиолокатором, при котором зону местонахождения обнаруженного устройства облучают в рабочем диапазоне частот, установленном по максимальному уровню принимаемых сигналов второй гармоники зондирующего сигнала, электромагнитным полем непрерывного излучения монохроматического зондирующего сигнала, осуществляют прием отраженных сигналов второй гармоники непрерывного излучения монохроматического зондирующего сигнала, изменяют мощность излучения зондирующего сигнала, измеряют и отображают на экране ПЭВМ и индикаторной панели блока управления радиолокатором уровень сигналов принимаемой второй гармоники и мощность излучения зондирующего сигнала, фиксируют минимальное значение мощности излучения зондирующего сигнала, при котором достигается максимальное значение уровня принимаемого сигнала второй гармоники зондирующего сигнала непрерывного излучения, по частоте излучения минимальной мощности зондирующего сигнала подтверждают рабочий диапазон частот обнаруженного радиоэлектронного устройства, а по рабочему диапазону частот достоверно устанавливают тип радиоэлектронного устройства.
Возможен дополнительный вариант осуществления способа, в котором облучение обследуемой поверхности контролируемого объекта полем зондирующего сигнала и прием отраженных сигналов вторых гармоник осуществлялись бы на взаимно ортогональных линейно поляризованных электромагнитных волнах, при этом посредством использования антенн осевого излучения формировали бы угловое распределение напряженности электрического поля в азимутальной плоскости в виде диаграммы направленности секторного типа, попарно ориентировали бы в пространстве максимумы диаграмм излучения и приема электромагнитных волн в направлении зоны местонахождения устройства, причем в каждом диапазоне частот антенну зондирующего сигнала размещали бы над соответствующей антенной, принимающей сигналы второй гармоники зондирующего сигнала, так чтобы продольные оси антенн располагались бы в вертикальной плоскости параллельно друг другу, расстояние между ними выбирали бы равным половине длины волны зондирующего сигнала и ориентировали бы в пространстве на излучение горизонтально поляризованной электромагнитной волны, а антенну, принимающую сигналы второй гармоники, ориентировали бы в пространстве на вертикальную поляризацию принимаемой электромагнитной волны.
В другом дополнительном варианте реализации способа целесообразно, чтобы облучение обследуемой поверхности контролируемого объекта полем зондирующего сигнала в рабочем диапазоне частот искомого устройства осуществляли бы электромагнитной волной с круговой поляризацией поля и согласованным с искомым устройством направлением вращения вектора поляризации.
На фиг.1 изображена функциональная схема трехдиапазонного нелинейного радиолокатора для реализации предложенного способа; на фиг.2 - схема размещения и ориентации в пространстве антенн зондирующего сигнала и приемных антенн вторых гармоник нелинейного радиолокатора в диапазонах частот F1, F2 и F3. В состав трехдиапазонного нелинейного радиолокатора для обнаружения электронных устройств с полупроводниковыми элементами входят:
- блок 1 передающих антенн диапазонов F1, F2 и F3, формирующих диаграммы направленности секторного типа;
- блок 2 приемных антенн с диаграммами направленности секторного типа в диапазонах частот 2F1, 2F2 и 2F3;
- блок 3 высокочастотных фильтров передатчика в каждом диапазоне частот F1, F2, F3, обеспечивающих излучение монохроматических зондирующих сигналов на несущих частотах диапазонов F1, F2 и F3 и заградительную фильтрацию вторых и последующих гармоник зондирующих сигналов;
- блоки 4, 5, 6 высокочастотных фильтров сигналов вторых гармоник 2F1, 2F2, 2F3 зондирующих сигналов соответственно диапазонов частот F1, F2 и F3;
- блок 7 передатчиков зондирующих сигналов трех диапазонов частот F1, F2 и F3 с возможностью перестройки частоты в каждом диапазоне частот и изменения мощности излучения;
- блоки 8, 9, 10 приемников отраженных сигналов вторых гармоник 2F1, 2F2 и 2F3 зондирующих сигналов диапазонов частот F1, F2 и F3;
- блок 11 цифровой обработки и измерения уровней принятых сигналов вторых гармоник 2F1, 2F2, 2F3;
- блок 12 управления режимами работы нелинейного радиолокатора;
- панель индикации 13 мощности излучения зондирующих сигналов и уровней приема отраженных сигналов вторых гармоник;
- ПЭВМ 14 регистрации, накопления и отображения мощностей излучения зондирующих сигналов и уровней приема отраженных сигналов вторых гармоник.
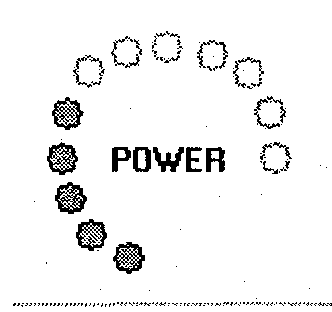
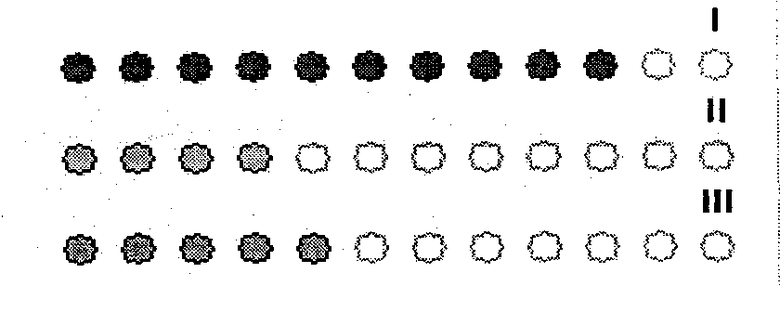
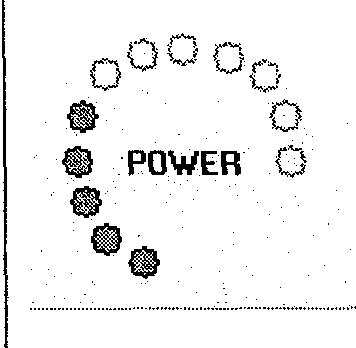
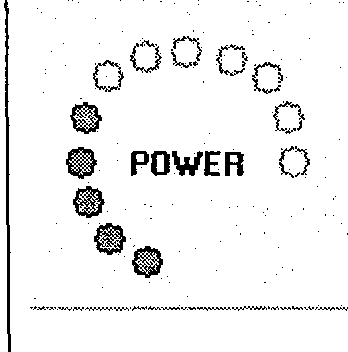
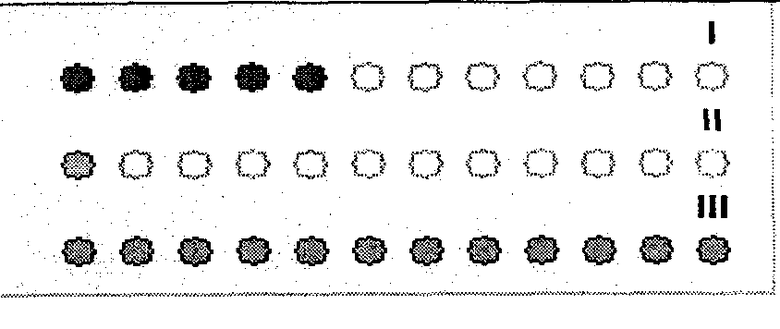
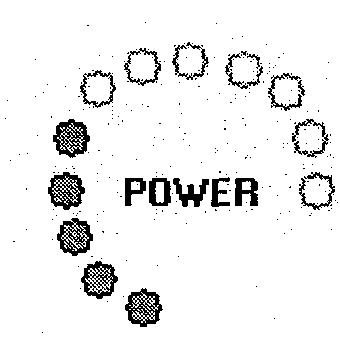
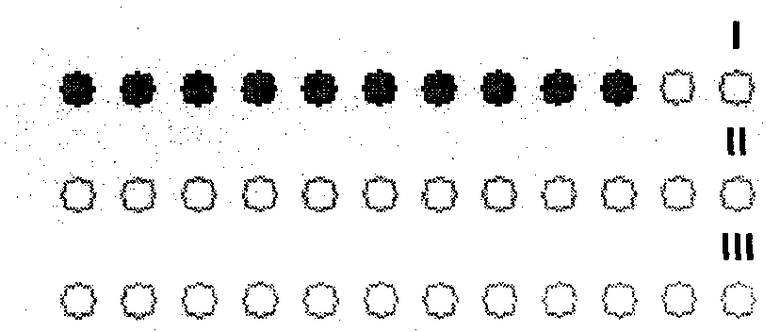
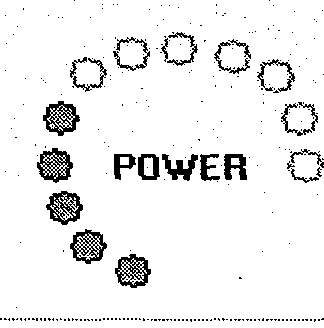
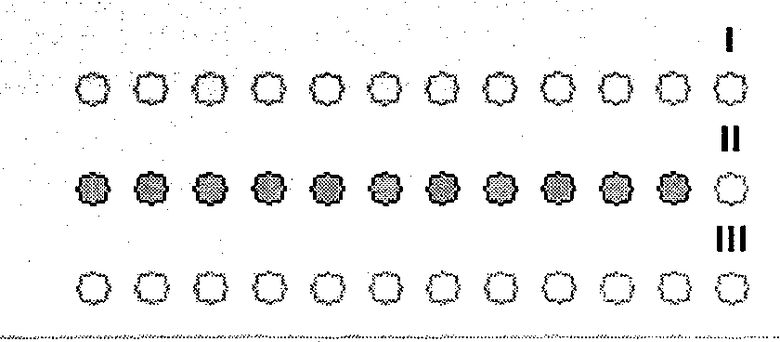
Процесс поиска и обнаружения электронного устройства с полупроводниковыми элементами, определения его рабочего диапазона частот выполняется в два этапа. На первом этапе обследуемую поверхность контролируемого объекта облучают электромагнитным полем импульсного излучения монохроматического зондирующего сигнала, формируемого в блоке передатчиков 7 и блоке высокочастотных фильтров 3 передатчиков 7 и излучаемого передающей антенной блока 1. Мощность генерации блоком передатчиков 7 импульсных зондирующих сигналов устанавливается (изменяется) в пределах двенадцати калиброванных градаций, которые отображаются на индикаторной панели 13 блока управления радиолокатором 12. Минимальный уровень мощности генерации передатчиков 7 радиолокатора составляет 100 мВт, максимальный - 1 Вт. Блок высокочастотных фильтров 3 передатчика 7 обеспечивает полосовое пропускание зондирующих сигналов радиолокатора в диапазонах частот F1, F2 и F3 и заградительную фильтрацию вторых 2F1, 2F2, 2F3 и последующих гармоник зондирующих сигналов. Частоту зондирующих сигналов изменяют поочередно в пределах трех диапазонов частот F1, F2 и F3. Диапазон частот F1 находится ниже рабочего диапазона частот F2 искомого устройства, который априори известен, а диапазон частот F3 находится выше рабочего диапазона частот F2 искомого устройства. При изменении частоты зондирующего сигнала в диапазонах частот F1 и F3 длина волны, излучаемой антеннами блока 1, существенно отличается от резонансных размеров линейных элементов входных цепей искомого электронного устройства, выполняющих функции антенны. Поэтому в этих диапазонах частот полупроводниковые нелинейные элементы облучаемого устройства будут находиться в режиме слабого взаимодействия с сигналами зондирования и уровни отраженных от них сигналов вторых гармоник 2F1, 2F3, а затем нелинейно рассеянных в пространстве будут невелики. В диапазоне частот F2 воздействие зондирующего излучения на линейные входные цепи устройства, имеющие высокую добротность, приводит к возникновению в них резонансного возрастания возбуждающих токов. В этом случае происходит переход работы полупроводниковых нелинейных элементов высокочастотных трактов из режима слабого взаимодействия в режиме сильного (резонансного) взаимодействия с сигналами зондирования. Это приводит к увеличению уровня отраженных от полупроводниковых нелинейных элементов сигналов второй гармоники 2F2, соответствующей резонансной частоте зондирующего сигнала диапазона частот F2, по сравнению с уровнями сигналов вторых гармоник на нерезонансных частотах зондирующих сигналов. Синхронно с облучением обследуемой поверхности контролируемого объекта электромагнитным полем зондирующего сигнала одинаковой в каждом частотном диапазоне мощности осуществляют с помощью блока 2 приемных антенн, блоков 4, 5, 6 высокочастотных фильтров и блоков 8, 9, 10 приемников прием отраженных сигналов вторых гармоник 2F1, 2F2, 2F3, образованных в каждом диапазоне частот F1, F2 и F3 в результате нелинейных преобразований зондирующего сигнала на полупроводниковых элементах высокочастотных трактов искомого устройства. Одновременно с приемом сигналов вторых гармоник блок 11 выполняет цифровую обработку и измерение в каждом частотном диапазоне F1, F2 и F3 уровней принимаемых сигналов вторых гармоник зондирующих сигналов. Измеренные значения уровней сигналов вторых гармоник передаются из блока 11 в блок управления радиолокатором 12, где они отображаются на его индикаторной панели 13 и на экране ПЭВМ 14. На индикаторной панели 13 и экране ПЭВМ 14 также отображаются мощности излучения зондирующих сигналов, которые могут изменяться в процессе сканирования в пределах двенадцати калиброванных градаций. Отображение уровней сигналов вторых гармоник осуществляется для каждого диапазона частот F1, F2 и F3 в виде линейных светодиодных шкал с отдельными градациями, расположенных друг под другом (см. таблицу).
Выбирают взаимную ориентацию в пространстве антенн зондирующего сигнала нелинейного радиолокатора и обследуемой поверхности контролируемого объекта, при которой наблюдается максимальный уровень принимаемых сигналов второй гармоники зондирующего сигнала, определяемый диаграммой обратного нелинейного рассеяния поля устройством на частоте второй гармоники. Фиксируют эти уровни сигналов на частотах вторых гармоник 2F1, 2F2, 2F3 в блоке 11, который передает значения уровней принятых сигналов гармоник в блок управления 12, где они отображаются на индикаторной панели 13 и с интерфейсного выхода типа RS 232 передаются в ПЭВМ 14 для записи на жесткий диск в виде отдельного файла с указанием даты и времени проведения измерений. Выбирают из отображенных и записанных уровней сигналов вторых гармоник зондирующих сигналов максимальный уровень, устанавливают соответствующую ему частоту зондирующего сигнала, по которой судят о наличии на контролируемом объекте устройства с полупроводниковыми элементами, о его рабочем диапазоне частот и предположительно о типе радиоэлектронного устройства. По направлению ориентации электрической оси антенны зондирующего сигнала с максимальным уровнем отклика на частоте второй гармоники локализуют зону местонахождения устройства.
Таким образом, в предложенном способе нелинейной радиолокации для обнаружения и распознавания электронных устройств используется информативный признак об априорно известном рабочем диапазоне частот входных высокочастотных трактов искомого устройства и сигнальный признак об уровнях сигналов вторых гармоник зондирующих сигналов, отраженных от полупроводниковых элементов устройства, принятых и измеренных радиолокатором. Использование этих двух признаков позволяет обнаружить и распознать искомые полупроводниковые электронные устройства в случае размещения их на контролируемых объектах среди других полупроводниковых устройств. Критерием установления рабочего диапазона частот обнаруженного устройства является превышение уровня сигналов принятой второй гармоники в одном из трех заданных диапазонов частот над уровнями сигналов, принятых в двух других диапазонах частот, при одинаковом значении мощности излучения зондирующих сигналов в каждом диапазоне частот.
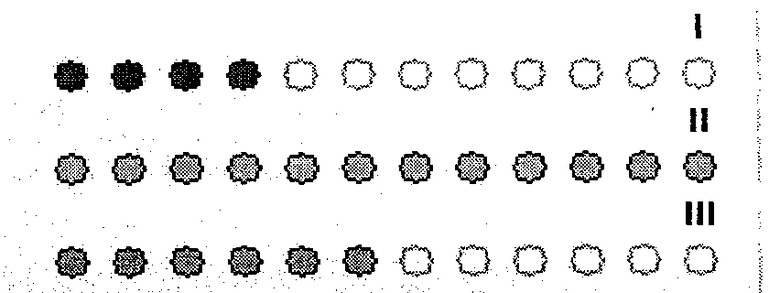
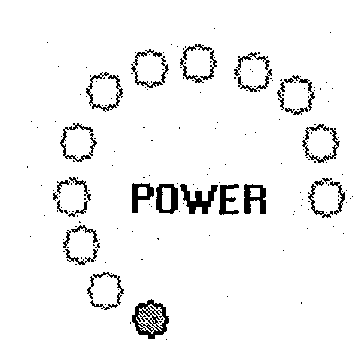
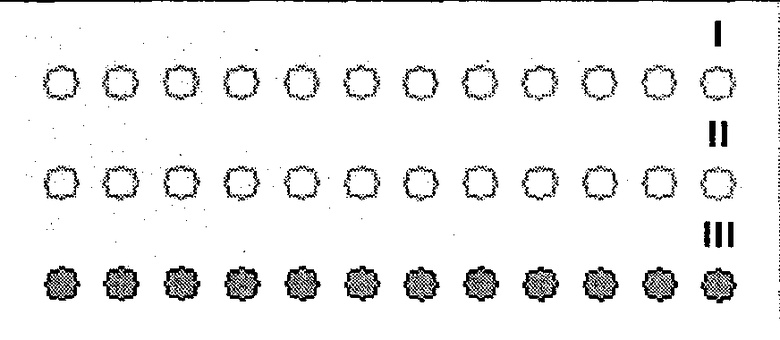
На втором этапе применяется непрерывный режим излучения монохроматического зондирующего сигнала в одном из трех диапазонов частот F1, F2 и F3, определенном на первом этапе по указанному выше критерию. В непрерывном режиме из блоков 8, 9, 10 приемников гармоник 2F1, 2F2 и 2F3 функционирует только блок приемника одного диапазона частот вторых гармоник зондирующего сигнала. Блок 11 осуществляет непрерывное измерение уровней сигналов принимаемой второй гармоники и по результатам оценки измеренных уровней блок управления локатором 12 обеспечивает автоматическую регулировку (уменьшение мощности) излучения блока передатчиков 7 так, чтобы получить при минимальном значении мощности зондирующего излучения максимальное значение уровня принимаемой блоком приемников второй гармоники (см. п.4 таблицы). На индикаторной панели 13 блока 12 одновременно отображаются уровни принимаемых сигналов второй гармоники и значения мощности зондирующего излучения радиолокатора, которые с интерфейсного выхода типа RS 232 блока управления 12 передаются в ПЭВМ 14, где записываются на жестком диске в виде отдельного файла.
Критерием подтверждения установленного на первом этапе рабочего диапазона частот обнаруженного устройства является получение максимального уровня сигналов принимаемой второй гармоники в этом диапазоне частот зондирующего сигнала при непрерывном режиме излучения и меньшем значении мощности излучения зондирующего сигнала по сравнению с мощностями излучения зондирующих сигналов в двух других диапазонах частот, полученными на первом этапе в импульсном режиме излучения (см. п.1 и 2 таблицы). В качестве примера в таблице показаны отображения на круговых светодиодных шкалах значений мощности излучения зондирующего сигнала, а на линейных шкалах - уровней сигналов принимаемых вторых гармоник в диапазонах частот F1, F2 и F3 зондирующего сигнала, где строки 1-3 для импульсного режима излучения, строка 4 для непрерывного режима излучения. Частотные диапазоны F1, F2 и F3 обозначены в таблице цифрами I-III соответственно.
Непрерывный режим излучения монохроматического зондирующего сигнала используется в радиолокаторе для повышения надежности обнаружения и достоверности распознавания электронного устройства с полупроводниковыми элементами посредством подтверждения установленного в режиме импульсного излучения зондирующего сигнала рабочего диапазона частот обнаруженного устройства.
Дополнительные эксплуатационные возможности возникают при использовании в нелинейном радиолокаторе направленных антенн осевого излучения, формирующих диаграммы направленности секторного типа. Схема размещения и ориентации в пространстве направленных антенн зондирующего сигнала и приемных антенн вторых гармоник трехдиапазонного нелинейного радиолокатора показаны на фиг.2. Антенны зондирующего сигнала 1 и приема отраженных сигналов вторых гармоник 2 в каждом диапазоне частот располагают в пространстве взаимно ортогонально по отношению к поляризациям излучаемой и принимаемой электромагнитной волны и попарно ориентируют путем поворота максимумы их диаграмм в направлении зоны местонахождения искомого устройства. В каждом диапазоне частот F1, F2 и F3 антенну зондирующего сигнала 1 размещают над соответствующей антенной 2, принимающей сигналы второй гармоники зондирующего сигнала, таким образом, чтобы продольные оси 3, 4 антенн 1, 2 располагались в вертикальной плоскости 5 и были параллельны друг другу. Это позволяет при повороте каждой пары антенн 1, 2 в диапазонах частот F1, F2, F3 ориентировать их продольные оси 3 и 4, которые у антенн осевого излучения совпадают с электрическими осями, в направлении зоны местонахождения устройства. В качестве антенн осевого излучения могут применяться, например, логопериодические вибраторные антенны с коэффициентом усиления GA=6-10 дБ. При этом формируются секторные диаграммы с шириной по полуспаду мощности в плоскости поляризации вектора  , в плоскости Н, ортогональной вектору поляризации
, в плоскости Н, ортогональной вектору поляризации  . Энергопотенциал радиолокатора с учетом мощности зондирующего сигнала составляет 0,4-4,0 Вт. Сектор углов θ=±25° [3, стр.50, рис.4], в котором интенсивно рассеивается в обратном направлении азимутальная компонента поля на частоте второй гармоники зондирующего сигнала, попадает в створ диаграммы направленности приемной антенны примерно на уровне половинной мощности. Кроме того, антенну зондирующего сигнала ориентируют в пространстве на излучение горизонтально поляризованной электромагнитной волны, а антенну, принимающую сигналы второй гармоники, ориентируют в пространстве на вертикальную поляризацию принимаемой электромагнитной волны. Возможен вариант облучения в рабочем диапазоне частот искомого устройства обследуемой поверхности контролируемого объекта электромагнитной волной с круговой поляризацией электромагнитного поля при априори известном направлении вращения вектора поляризации искомого устройства.
. Энергопотенциал радиолокатора с учетом мощности зондирующего сигнала составляет 0,4-4,0 Вт. Сектор углов θ=±25° [3, стр.50, рис.4], в котором интенсивно рассеивается в обратном направлении азимутальная компонента поля на частоте второй гармоники зондирующего сигнала, попадает в створ диаграммы направленности приемной антенны примерно на уровне половинной мощности. Кроме того, антенну зондирующего сигнала ориентируют в пространстве на излучение горизонтально поляризованной электромагнитной волны, а антенну, принимающую сигналы второй гармоники, ориентируют в пространстве на вертикальную поляризацию принимаемой электромагнитной волны. Возможен вариант облучения в рабочем диапазоне частот искомого устройства обследуемой поверхности контролируемого объекта электромагнитной волной с круговой поляризацией электромагнитного поля при априори известном направлении вращения вектора поляризации искомого устройства.
Сложный нелинейный рассеиватель, одним из возможных вариантов которого являются полупроводниковые радиоэлектронные приемо-передающие устройства, представляет собой сложную электродинамическую систему, в различных частях которой содержатся нелинейные полупроводниковые элементы и линейные входные цепи, выполняющие функции излучателей, занимающих различные пространственные положения. К тому же сам нелинейный рассеиватель может находиться на объекте вблизи металлических частично экранирующих и отражающих поверхностей, а также скрытно размещаться в поглощающих материалах конструкции объекта. Вследствие совокупности указанных обстоятельств поляризация электромагнитной волны поля обратного рассеяния сложного нелинейного устройства становится частичной, т.е. направление вектора поляризации Е в пространстве не будет постоянным, как в случае полной поляризации, а изменяться при изменении условий размещения нелинейного рассеивателя на объекте и действий различных эффектов при распространении в среде электромагнитной волны поля рассеяния.
Известно [2, стр.20], что для сложного нелинейного рассеивателя изменение поляризации зондирующего сигнала приводит к изменению величины зондирующего сигнала на полупроводниковых элементах нелинейного рассеивателя, а следовательно, и отраженного от них сигнала. Это, в свою очередь, ведет к изменению не только мощности поля, рассеиваемого радиоэлектронным устройством в обратном направлении на частоте второй гармоники, но и поляризации электромагнитной волны поля рассеивания.
Частичная поляризация электромагнитной волны поля обратного рассеяния сложного нелинейного устройства, возникающая вследствие сложности электродинамической структуры устройства и пути распространения в среде электромагнитной волны, может быть представлена на основании принципа суперпозиции волн в виде пары сигналов, объединенных в поляризационную матрицу, каждый из которых соответствует одной из компонент волны поля рассеяния в горизонтально-вертикальном поляризационном базисе. Особенностью нелинейного зондирования является возможность преобразования поляризационной матрицы нелинейного рассеивателя в другой поляризационный базис принимаемого сигнала гармоники [2, стр.20]. Это означает, что при любой линейной поляризации приемной антенны (горизонтальной или вертикальной) она будет принимать сигналы частоты второй гармоники поля обратного рассеяния, так как последнее содержит обе компоненты поля в горизонтально-вертикальном поляризационном базисе. Эксперимент показал, что уровень сигналов второй гармоники поля обратного рассеяния полупроводникового электронного устройства, принимаемых на антенну с вертикальной поляризацией, больше уровня сигналов при горизонтальной поляризации приемной антенны на 16 дБ Вт/м2 [4, стр.139, рис.5]. С другой стороны, известно [5, стр.154, рис.2], что интенсивность волны поля, рассеянного на частоте гармоники по диаграмме обратного нелинейного рассеяния электронного устройства в направлении приемной антенны при горизонтальной поляризации антенны зондирующего сигнала на 12-18 дБ Вт/м2 больше, чем при вертикальной поляризации антенны зондирующего сигнала. Сказанное выше объясняет целесообразность выполнения ориентации в пространстве антенны зондирующего сигнала на излучение горизонтально поляризованной электромагнитной волны, а антенны, принимающей сигналы второй гармоники, - на вертикальную поляризацию принимаемой электромагнитной волны (п.2 формулы изобретения) для увеличения дальности обнаружения электронных устройств с полупроводниковыми элементами. За счет использования в нелинейном радиолокаторе направленных антенн осевого излучения, формирующих диаграммы направленности секторного типа, попарного совмещения антенн зондирующего сигнала и приемных антенн вторых гармоник, расположения их продольных осей в вертикальной плоскости параллельно друг другу, ортогональности их поляризаций и ориентации в пространстве на излучение горизонтально поляризованной электромагнитной волны и прием сигналов второй гармоники с вертикальной поляризацией поля электромагнитной волны достигается увеличение по сравнению с существующими устройствами аналогичного назначения дальности обнаружения при энергопотенциале радиолокатора ЭПЗС=0,4-4,0 Вт до расстояний R=1-5 м и обеспечивается пространственная локализация электронных устройств с полупроводниковыми элементами.
Дальнейшее увеличение дальности обнаружения может быть достигнуто при условии наличия априорной информации о кругополяризованном излучении (приеме) сигналов линейными элементами входных цепей искомых полупроводниковых радиоэлектронных устройств и направлении вращения вектора поляризации (правое, левое). В этом случае для увеличения дальности обнаружения необходимо в качестве антенны зондирующего сигнала на рабочей частоте искомого устройства использовать антенну с круговой поляризацией поля и согласованным с входными цепями искомого устройства направлением вращения вектора поляризации. Выигрыш в уровне сигнала принимаемой второй гармоники может достигать 4,5 дБ.
Таким образом, в предложенном способе поиска, обнаружения и распознавания электронных устройств с полупроводниковыми элементами за счет формирования информативных признаков о рабочем диапазоне частот входных высокочастотных трактов устройств, использования двухэтапного процесса поиска, обнаружения и определения рабочего диапазона частот искомого устройства достигается надежное обнаружение электронных устройств с полупроводниковыми элементами и достоверное определение рабочих диапазонов частот, а также распознавание их типа на фоне присутствия близкорасположенных других электронных устройств.
Литература
1. Дикарев В.И., Заренков В.А., Заренков Д.В. Методы и средства обнаружения объектов в укрывающихся средах. - СПб: Наука и техника, 2004.
2. Горбачев А.А., Колданов А.П. и др. Признаки распознавания нелинейных рассеивателей электромагнитных волн." Нелинейная радиолокация. Сборник статей. Часть 1. - М.: Радиотехника, 2005.
3. Заборонкова Т.М., Шорохова Е.А. Влияние земной и водной поверхностей на электромагнитное поле, рассеянное на гармониках зондирующего сигнала круговой рамочной антенной. Антенны, выпуск 2 (141), 2009 г.
4. Горбачев А.А., Ларцов С.В., Тараканов С.П. Измерение характеристик объектов, нелинейно рассеивающих электромагнитные волны. Нелинейная радиолокация. Сборник статей. Часть 2. - М.: Радиотехника, 2006.
5. Ларцов С.В. Методы экспериментального исследования поляризационных свойств нелинейных рассеивателей. Нелинейная радиолокация. Сборник статей. Часть 2. - М.: Радиотехника, 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ СКРЫТЫХ НЕЛИНЕЙНЫХ РАДИОЭЛЕКТРОННЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2516436C2 |
| Способ и устройство обнаружения радиоуправляемых взрывных устройств с применением беспилотного летательного аппарата | 2018 |
|
RU2745658C2 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2003 |
|
RU2253878C1 |
| ИМПУЛЬСНЫЙ НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2499277C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2506607C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОСКОЛОЧНЫХ ВЗРЫВНЫХ УСТРОЙСТВ | 2013 |
|
RU2601667C2 |
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЦЕЛЕУКАЗАТЕЛЕМ | 2011 |
|
RU2474840C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| Способ оценки качества электромагнитного экрана | 2018 |
|
RU2685058C1 |
| СПОСОБ РАДИОЛОКАЦИИ ОБЪЕКТОВ С РАДИОПОГЛОЩАЮЩИМ ПОКРЫТИЕМ | 2012 |
|
RU2505838C1 |
Изобретение может быть использовано для обнаружения электронных устройств с полупроводниковыми элементами, несанкционированно установленными на контролируемом объекте и, в частности, в нелинейной радиолокации для дистанционного обнаружения приемо-передающих радиоустройств, находящихся в пассивном режиме при отключенном электропитании. Способ включает облучение обследуемого объекта импульсным электромагнитным полем монохроматического зондирующего сигнала с изменяющейся поочередно в пределах трех диапазонов частот частотой и одинаковой мощностью излучения зондирующих сигналов, синхронно с облучением прием в каждом диапазоне частот отраженных сигналов вторых гармоник, выделение максимального уровня второй гармоники, установление по нему соответствующей частоты монохроматического зондирующего сигнала импульсного излучения, по которой судят о наличии на объекте устройства с полупроводниковыми элементами и его рабочем диапазоне частот, определение по направлению ориентации электрической оси антенны зондирующего сигнала зоны местонахождения устройства. Зону местонахождения обнаруженного устройства повторно облучают в рабочем диапазоне частот, установленном по максимальному уровню принимаемых сигналов второй гармоники монохроматического зондирующего сигнала импульсного излучения, электромагнитным полем непрерывного излучения монохроматического зондирующего сигнала, при котором изменяют мощность излучения зондирующего сигнала. Осуществляют прием отраженных сигналов второй гармоники непрерывного излучения монохроматического зондирующего сигнала, фиксируют минимальное значение мощности излучения зондирующего сигнала, при котором уровень принимаемого сигнала второй гармоники зондирующего сигнала максимален. По частоте излучения минимальной мощности подтверждают диапазон рабочих частот обнаруженного устройства и достоверно устанавливают его тип. В заявленном способе используют антенны осевого излучения для формирования в азимутальных плоскостях диаграмм направленности секторного типа. Облучение обследуемого объекта полем импульсного и непрерывного излучения монохроматических зондирующих сигналов и прием отраженных сигналов вторых гармоник осуществляют на взаимно ортогональных линейных поляризациях электромагнитных волн, а также электромагнитной волной с круговой поляризацией поля. Достигаемым техническим результатом является повышение надежности обнаружения и достоверности распознавания радиоэлектронных устройств с полупроводниковыми элементами, а также увеличение дальности обнаружения. 2 з.п.ф-лы, 2 ил., 1 табл.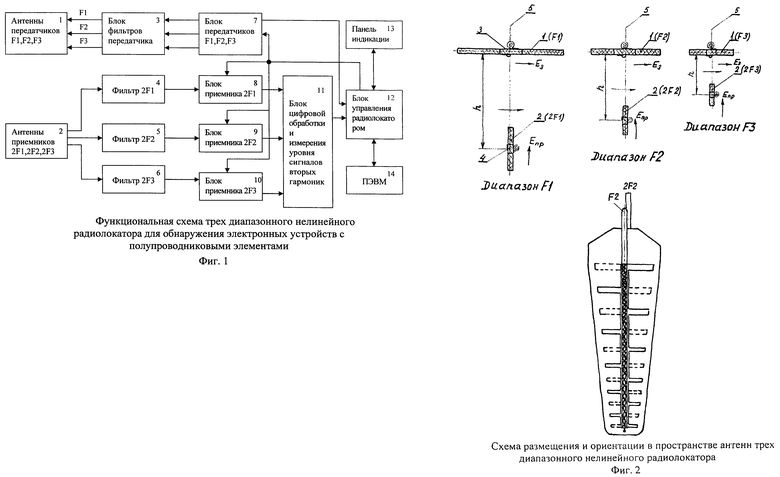
1. Способ поиска, обнаружения и распознавания электронных устройств с полупроводниковыми элементами, заключающийся в последовательном сканировании поверхности контролируемого объекта нелинейным радиолокатором, фиксировании и обработке в ПЭВМ полученных от нее электромагнитных откликов, определении местонахождения устройства, отличающийся тем, что при сканировании обследуемую поверхность контролируемого объекта облучают электромагнитным полем импульсного излучения монохроматического зондирующего сигнала, частоту которого изменяют поочередно в пределах трех диапазонов частот, соответственно находящихся ниже рабочего диапазона частот искомого устройства, в рабочем диапазоне частот искомого устройства, который априори известен, и выше рабочего диапазона частот искомого устройства, синхронно с облучением обследуемой поверхности контролируемого объекта электромагнитным полем импульсного излучения монохроматического зондирующего сигнала осуществляют прием отраженных сигналов вторых гармоник, образованных в каждом диапазоне частот в результате нелинейных преобразований зондирующего сигнала на полупроводниковых элементах высокочастотных трактов искомого устройства при одинаковой мощности излучения зондирующих сигналов, которую устанавливают в каждом диапазоне частот излучения зондирующего сигнала, одновременно измеряют уровни принимаемых сигналов вторых гармоник импульсного излучения зондирующих сигналов, которые вместе с установленными мощностями излучения зондирующих сигналов отображают на экране ПЭВМ и индикаторной панели блока управления радиолокатором, выбирают взаимную ориентацию в пространстве антенн зондирующего сигнала радиолокатора и обследуемой поверхности контролируемого объекта, при которой уровни принимаемых сигналов вторых гармоник максимальны, фиксируют уровни принимаемых сигналов вторых гармоник зондирующих сигналов, выделяют из них максимальный уровень сигналов второй гармоники, устанавливают соответствующую ему частоту зондирующего сигнала импульсного излучения, по которой судят о наличии на контролируемом объекте электронного устройства с полупроводниковыми элементами и его рабочем диапазоне частот, а по направлению ориентации электрической оси антенны зондирующего сигнала установленного диапазона частот локализуют зону местонахождения устройства, затем повторно выполняют сканирование поверхности контролируемого объекта нелинейным радиолокатором, при котором зону местонахождения обнаруженного устройства облучают в рабочем диапазоне частот, установленном по максимальному уровню принимаемых сигналов второй гармоники зондирующего сигнала, электромагнитным полем непрерывного излучения монохроматического зондирующего сигнала, осуществляют прием отраженных сигналов второй гармоники непрерывного излучения монохроматического зондирующего сигнала, изменяют мощность излучения зондирующего сигнала, измеряют и отображают на экране ПЭВМ и индикаторной панели блока управления радиолокатором уровень сигналов принимаемой второй гармоники и мощность излучения зондирующего сигнала, фиксируют минимальное значение мощности излучения зондирующего сигнала, при котором достигается максимальное значение уровня принимаемого сигнала второй гармоники зондирующего сигнала непрерывного излучения, по частоте излучения минимальной мощности зондирующего сигнала подтверждают рабочий диапазон частот обнаруженного радиоэлектронного устройства, а по рабочему диапазону частот достоверно устанавливают тип радиоэлектронного устройства.
2. Способ по п.1, отличающийся тем, что облучение обследуемой поверхности контролируемого объекта электромагнитным полем импульсного и непрерывного излучения монохроматического зондирующего сигнала и прием отраженных сигналов вторых гармоник осуществляют на взаимно ортогональных линейно поляризованных электромагнитных волнах, при этом посредством использования антенн осевого излучения формируют угловое распределение напряженности электрического поля в азимутальной плоскости в виде диаграммы направленности секторного типа, попарно ориентируют в пространстве максимумы диаграмм излучения и приема электромагнитных волн в направлении зоны местонахождения устройства, причем в каждом диапазоне частот антенну зондирующего сигнала размещают над соответствующей антенной, принимающей сигналы второй гармоники зондирующего сигнала, так, чтобы продольные оси антенн располагались в вертикальной плоскости параллельно друг другу, расстояние между ними выбирают равным половине длины волны зондирующего сигнала, и ориентируют в пространстве на излучение горизонтально поляризованной электромагнитной волны, а антенну, принимающую сигналы второй гармоники, ориентируют в пространстве на вертикальную поляризацию принимаемой электромагнитной волны.
3. Способ по п.1, отличающийся тем, что облучение обследуемой поверхности контролируемого объекта электромагнитным полем импульсного и непрерывного излучения монохроматического зондирующего сигнала в рабочем диапазоне частот искомого устройства осуществляют электромагнитной волной с круговой поляризацией поля и согласованным с искомым устройством направлением вращения вектора поляризации.
| СПОСОБ ВЫЯВЛЕНИЯ И ОЦЕНКИ МЕСТ ЗАКЛАДКИ В ПОМЕЩЕНИЯХ ПОЛУПРОВОДНИКОВЫХ УСТРОЙСТВ ДЛЯ НЕСАНКЦИОНИРОВАННОГО СЪЕМА РЕЧЕВОЙ И ВИЗУАЛЬНОЙ ИНФОРМАЦИИ | 2004 |
|
RU2257012C1 |
| СПОСОБ СКРЫТНОГО ПОДАВЛЕНИЯ ПОДСЛУШИВАЮЩЕГО УСТРОЙСТВА, СОДЕРЖАЩЕГО ЛОГИЧЕСКИЕ ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ | 2005 |
|
RU2292652C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2003 |
|
RU2253878C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНОГО ОБЪЕКТА С РАСПОЗНАВАНИЕМ ТИПА НЕЛИНЕЙНОСТИ | 2001 |
|
RU2205419C2 |
| US 2010001899 A1, 07.01.2010 | |||
| СПОСОБ ПОЛУЧЕНИЯ СЛОЖНЫХ ЭФИРОВ КАРБОНОВБ1ХКИСЛОТ | 0 |
|
SU239140A1 |
| US 4458246 A, 03.07.1984 | |||
| US 5777572 A, 07.07.1998. | |||

