напряжения на обмотке якоря электро- 30 пропорционально-дифференциального блодвигателя определяются величиной сигнала на выходе регулятора 3 тока. Зависимости упругого момента, угловой скорости двигателя, угловой скорости
ка, третий - с выходом пропорционально-интегрального блока, а выход соединен с входом первого регулятора скорости, первый вход второго диффемеханизма и тока якорной цепи от вре- 35 РенЧиального блока соединен с выходом
датчика угловой скорости электродвигателя и с- первым входом пропорционально-интегрального блока, выход второго дифференциального блока соединен с третьим входом первого регулятора скорости, вход третьего дифференциального блока соединен с выходом датчика угловой скорости механизма и вторыми входами пропорционально- интегрального блока 4 второго дифференциального блока, выход третьего дифференциального блока непосредственно и через четвертый дифференциальный блок соединен с входами второго регулятора скорости, четвертый вход которого соединен с выходом пропорционального блока.
мени определяются настройкой первого и второго регуляторов угловой скорости, регулятора упругого момента, регулятора тока, а также блоков корректирующих обратных связей.
Формула изобретения
Электропривод, содержащий электродвигатель постоянного тока, вал кото- рого через упругое звено соединен с механизмом с переменным моментом инерции, последовательно соединенные первый регулятор скорости, регулятор тока, систему регулирования импуль- сов управления, тиристорный преобразователь, вход которого подключен к
ка, третий - с выходом пропорционально-интегрального блока, а выход соединен с входом первого регулятора скорости, первый вход второго диффеРенЧиального блока соединен с выходом
датчика угловой скорости электродвигателя и с- первым входом пропорционально-интегрального блока, выход второго дифференциального блока соединен с третьим входом первого регулятора скорости, вход третьего дифференциального блока соединен с выходом датчика угловой скорости механизма и вторыми входами пропорционально- интегрального блока 4 второго дифференциального блока, выход третьего дифференциального блока непосредственно и через четвертый дифференциальный блок соединен с входами второго регулятора скорости, четвертый вход которого соединен с выходом пропорционального блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА КРАНА | 2002 |
|
RU2239277C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА МЕХАНИЗМА, УПРУГО СВЯЗАННОГО С ЭЛЕКТРОДВИГАТЕЛЕМ, ОДНОКОНТУРНАЯ АСТАТИЧЕСКАЯ ВТОРОГО ПОРЯДКА | 2003 |
|
RU2249242C1 |
| Электропривод постоянного тока | 1985 |
|
SU1317624A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158468C2 |
| ЭЛЕКТРОПРИВОД ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН | 2010 |
|
RU2432664C2 |
| МИКРОПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2350009C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ УПРУГОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2464696C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158467C2 |
Изобретение относится к электротехнике и может быть использовано для управления электроприводами с двигателем постоянного тока и механизмами, момент инерции которых изменяется. Цель изобретения - снижение динамической ошибки регулирования угловой скорости механизма, уменьшение чувствительности электропривода к изменению момента инерции механизма. Электропривод содержит первый регулятор 2 скорости, регулятор 3 тока, второй регулятор 15 скорости, регулятор 20 упругого момента, три дифференциальных блока 16 - 18, пропорционально-интегральный блок 19. Регулятор 20 упругого момента первым входом соединен с выходом второго регулятора 15 скорости, вторым входом - с выходом третьего пропорционально-дифференциального блока 12, третьи - с выходом пропорционального-интегрального блока 19. В электроприводе обеспечиваются снижение динамической ошибки, уменьшение чувствительности электропривода к изменению момента инерции механизма и компенсация влияния внутренней обратной связи по угловой скорости механизма на динамику контура регулирования по угловой скорости механизма. 1 ил.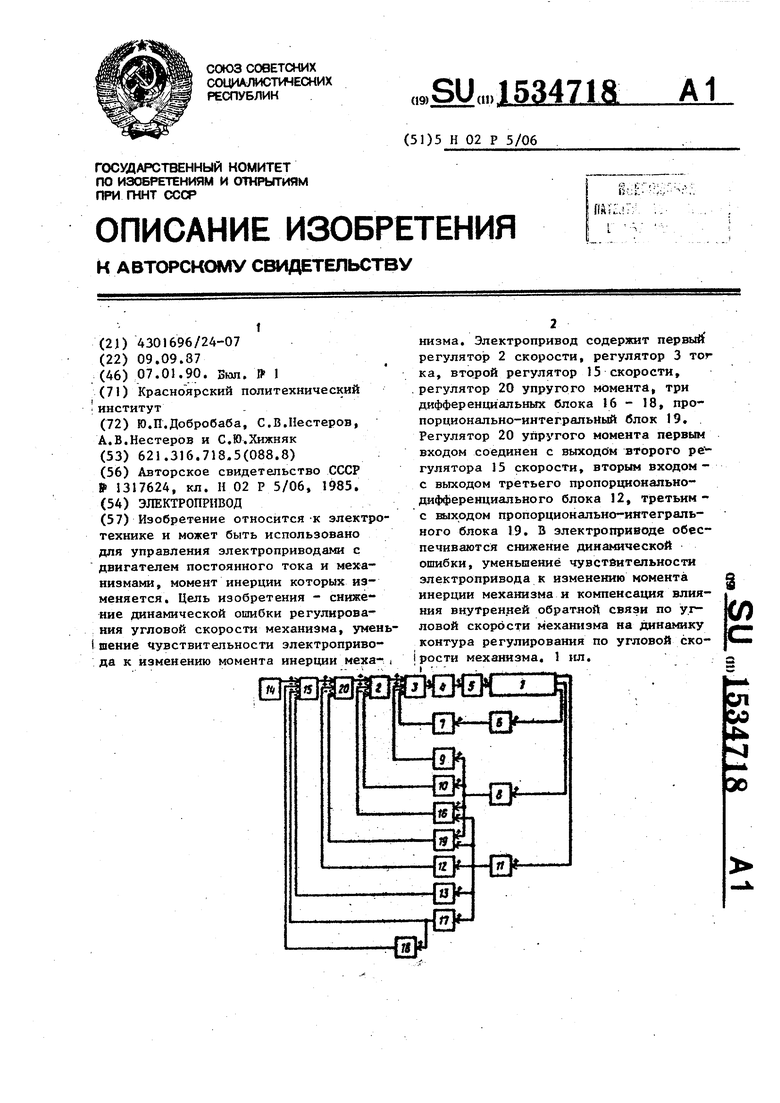
| Электропривод постоянного тока | 1985 |
|
SU1317624A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
