Настоящая заявка притязает на приоритет предварительной заявки США №60/802632, озаглавленной «АДАПТИВНАЯ ФАЗОВАЯ КОРРЕКЦИЯ ДЛЯ SISO И MIMO OFDM СИСТЕМ», подданной 22 мая 2006, права на которые переданы настоящему заявителю и которые включены в настоящий документ посредством ссылки.
Уровень техники
I. Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к связи, а более конкретно к методикам выполнения фазовой коррекции для беспроводной связи.
II. ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В системе беспроводной связи передатчик обычно обрабатывает (например, кодирует, модулирует) данные обмена для выработки символов данных. Для когерентной системы передатчик объединяет пилотные символы (символы пилот-сигналов) с символами данных, обрабатывает объединенные данные и пилотные символы для выработки радиочастотного(RF) сигнала и передает RF сигнал через беспроводной канал. Беспроводной канал искажает передаваемый RF сигнал с отзывом канала и в дальнейшем ухудшает сигнал шумом и помехами.
Приемник принимает передаваемый RF сигнал и обрабатывает принятый RF сигнал для получения импульсов. Для когерентного обнаружения приемник оценивает отзыв беспроводного канала, основываясь на принятом пилот-сигнале, и получает оценку канала. Затем приемник выполняет обнаружение с оценкой канала для получения оцененных символов данных, которые являются оценками символов данных, отправленных передатчиком. Приемник затем обрабатывает (например, демодулирует и декодирует) оцененные символы данных для получения декодированных данных.
Как правило, приемник оценивает частотные ошибки в приемнике. Эта частотная ошибка может происходить из-за разницы в частотах колебания в передатчике и приемнике из-за Доплеровского сдвига и т.д. Приемник может удалять частотную ошибку из импульсов и затем выполнять обнаружение на импульсах со скорректированной частотой. Несмотря на это, обычным делом является остаточная ошибка в оценке частотной ошибки. Остаточная ошибка приводит к фазовой ошибке в импульсах со скорректированной частотой, а фазовая ошибка ухудшает качественные показатели.
Тем самым в технике имеется необходимость в методе выполнения фазовой коррекции для беспроводной связи.
Сущность изобретения
В этом документе будут описаны способы для выполнения фазовой коррекции для беспроводной связи. В аспекте принятые пилотные символы и принятые символы данных могут быть получены из передачи с мультиплексированием с ортогональным частотным разделением каналов (OFDM) и/или передачи с множественными входами/выходами (MIMO). Первую фазовую информацию получают, основываясь на принятых пилотных символах. Вторую фазовую информацию получают, основываясь на принятых символах данных. Фазу принятых символов данных корректируют, основываясь на первой и второй фазовых информациях. Фазовая коррекция может использовать первую и вторую фазовые информации прямо и/или косвенно, и она может быть выполнена одним или несколькими этапами.
Для получения первой фазовой информации фаза принятых пилотных символов может быть скорректирована первоначальной фазовой ошибкой, которая может быть фазовой ошибкой для приоритетного символьного периода, нулем или каким-нибудь другим значением. Обнаружение может быть произведено на фазе корректированных пилотных символов для получения оцененных пилотных символов. Скалярные произведения оцененных пилотных символов и известных пилотных символов может быть вычислено, взвешено с помощью оценки отношения «сигнал-шум» (ОСШ, SNR) для различных поднесущих и/или потоков, объединено для получения первой фазовой информации. Для получения второй фазовой информации фазу принятых символов данных может быть скорректирована первой фазовой информацией. Обнаружение может быть произведено на символах данных со скорректированной фазой для получения оцененных символов данных. Твердые решения могут быть получены для оцененных символов данных. Скалярные произведения оцененных символов данных и твердых решений могут быть вычислены, взвешены масштабирующими коэффициентами, которые могут быть зависимыми от SNR и/или других коэффициентов, и объединены для получения второй фазовой информации. Первая и вторая фазовые информации могут быть получены другими способами.
Фазовая коррекция может быть выполнена различными способами. В одной схеме фаза принятых пилотных символов корректируется (например, основываясь на второй базовой информации от приоритетного символьного периода), первую фазовую информацию получают, основываясь на пилотных символах со скорректированной фазой, и фаза принятых символов данных корректируется, основываясь на первой фазовой информации. В другой схеме фаза принятых символов данных корректируется, основываясь на первой фазовой информации, обнаружение выполняется на символах данных со скорректированной фазой для получения оцененных символов данных, и вторую фазовую информацию получают, основываясь на оцененных символах данных, и фазу оцененных символов данных корректируют, основываясь на второй фазовой информации. В еще одной схеме первую и вторую фазовые информации объединяют для получения объединенной фазовой информации и фазу принятых символов данных корректируют, основываясь на объединенной фазовой информации. Фазовая коррекция также может быть выполнена другими способами.
Различные аспекты и отличительные признаки раскрытия более подробно описаны ниже.
Краткое описание чертежей
Фиг.1 показывает передатчик и приемник для SISO передачи.
Фиг.2 показывает передатчик и приемник для MIMO передачи.
Фиг.3 и 4 показывают два процесса для выполнения фазовой коррекции с объединенной фазовой информацией.
Фиг.5 показывает формат данных в IEEE 802, 11 а/д.
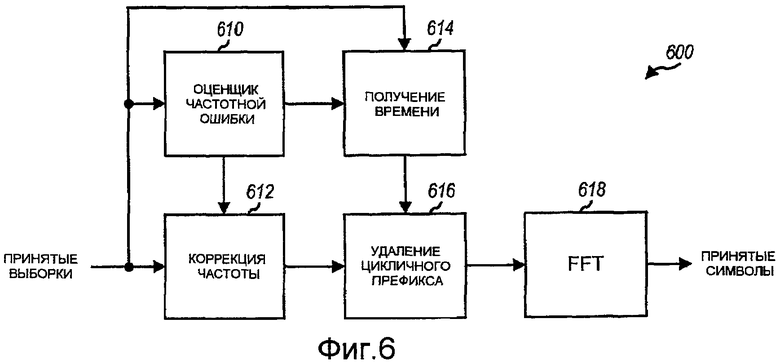
Фиг.6 показывает OFDM демодулятор.
Фиг.7 показывает блок фазовой коррекции.
Фиг.8 показывает блок вычисления фазовой ошибки.
Фиг.9 и 10 показывают два процесса для выполнения фазовой коррекции во многих этапах.
Фиг.11 показывает типичный процесс для выполнения фазовой коррекции.
Фиг.12 показывает устройство для выполнения фазовой коррекции.
Подробное описание
Способы фазовой коррекции, описанные здесь, могут быть использованы для различных сетей связи, таких как беспроводная глобальная региональная сеть (WWAN), беспроводная сеть масштаба города (WMAN) и персональная беспроводная сеть (WPAN). Термины «сети» и «системы» часто используются взаимозаменяемо. Эти беспроводные сети могут использовать Множественный Доступ с Разделением Каналов (CDMA), Множественный Доступ с Разделением Частот (FDMA), Множественный Доступ с Разделением Времени (TDMA), Множественный Доступ с Пространственным Разделением Каналов (SDMA), Ортогональный Множественный Доступ с Разделением Частот (OFDMA), Множественный Доступ с Разделением Частот на Одной Несущей (SC-FDMA) и/или некоторые другие схемы множественного доступа. OFDMA использует OFDM. SC-FDMA использует Мультиплексирование с Разделением частот на одной поднесущей (SC-FDM). OFDM и SC-FDM делят диапазон частот системы на множество (К) ортогональных поднесущих, к которые также относятся тоны, бины и т.д. Каждая поднесущая может быть модулирована данными. В общем, символы модуляции отправляют в частотный интервал с OFDM и во временной интервал с SC-FDM. Для ясности, способы, которые описаны, являются для OFDM основанных систем, использующих OFDM.
Способы также могут быть использованы для передач с одним входом и одним выходом (SISO), передач с одним входом и множеством выходов (SIMO), передач со множеством входов и одним выходом (MI SO) и передач со множеством входов и множеством выходов (MIMO). Один вход относится к одной передающей антенне, и множественный вход относится к многоэлементным передающим антеннам для передачи данных. Один выход относится к одной принимающей антенне, и множественный выход относится к многоэлементным принимающим антеннам для приема данных. Способы также могут использоваться для различных модуляционных схем, таких как М-агу фазовая манипуляция (M-PSK) и М-агу квадратичная амплитудная модуляция (M-QAM).
Фиг.1 показывает блок-схему передатчика 110 и приемника 150 для SISO передачи. Для канала нисходящей связи (или канала восходящей связи) передатчик 110 может быть частью базовой станции, точки доступа, узла В и/или какого-нибудь другого сетевого объекта. Приемник 150 может быть частью терминала, станции, мобильной станции, оборудования пользователя, блока абонента и/или какого-нибудь другого устройства. Для канала восходящей связи (или канала обратной связи) передатчик 110 может быть частью терминала, станции, мобильной станции, оборудования пользователя и т.д., а приемник 150 может быть частью базовой станции, точки доступа, узла В, и т.д.
В передатчике 110 данные передачи (ТХ) и процессор 112 пилот-сигнала обрабатывает (например, кодирует, разделяет, разбивает на символьные таблицы) данные обмена для генерирования символов данных. Процессор 112 также генерирует пилотные символы и в дальнейшем мультиплексирует пилотные символы с символами данных. Как здесь используется, символ данных является символом для данных, пилотный символ является символом для пилот-сигнала, а символ является обычно комплексным значением. Символ данных или пилотный символ может быть отправлен на одной поднесущей в одном символьном периоде. Символы данных и пилотные символы могут быть модуляционными символами от модуляционной схемы, такой как PSK или QAM. Пилотные символы априори известны как передатчику, так и приемнику и могут быть использованы для генерации коротких и длинных обучающих символов или других типов пилот-сигналов, которые будут описаны ниже. OFDM модулятор/передатчик (OFDM MOD/TMTR) 116 выполняет OFDM модуляцию на символах данных и пилотных символах для получения выходных чипов. Передатчик 116 дополнительно обрабатывает (например, преобразовывает в аналог, фильтрует, усиливает, преобразовывает с увеличением) выходные чипы и генерирует модулированный сигнал, который передается от антенны 118.
В приемнике 150 антенна 152 принимает модулированный сигнал от передатчика 110 и обеспечивает принятый сигнал. Приемник/OFDM демодулятор (RCVR/OFDM DEMOD) 154 обрабатывает (например, фильтрует, усиливает, преобразовывает с уменьшением, оцифровывает) принятый сигнал для получения импульсов, оценивает и удаляет частотные ошибки в приемнике 150, и дополнительно выполняет OFDM демодуляцию на импульсах для получения принятых символов от интересующих поднесущих. Блок 160 фазовой коррекции получает принятые символы, оценивает фазовую ошибку в каждом символьном периоде, удаляет фазовую ошибку и обеспечивает символы со скорректированной фазой. Термины «ошибка» и «смещение» часто используются взаимозаменяемо по отношению к частоте и фазе. Детектор 162 выполняет обнаружение (например, согласованную фильтрацию или стабилизацию) на символах со скорректированной фазой и обеспечивает оцененные пилотные символы и символы данных. Блок 160 фазовой коррекции может оценивать фазовую ошибку, основываясь на принятых символах и/или оцененных символах. Процессор 164 RX данных обрабатывает (например, объединяет и декодирует) оцененные символы данных и обеспечивает декодированные данные. Процессор 164 может вычислять логарифмические отношения правдоподобия (LLR) для кодовых битов, основываясь на оцененных символах данных, и дополнительно объединяет и декодирует LLR для получения декодированных данных.
Контроллеры/процессоры 120 и 170 руководят операциями в передатчике 110 и приемнике 150 соответственно. Память 122 и 172 хранит данные и программные коды для передатчика 110 и приемника 150 соответственно.
Фиг.2 показывает блок-схему передатчика 210 и приемника 250 для MIMO передачи. Передатчик 210 оснащен многоэлементными (Т) антеннами, а приемник 250 оснащен многоэлементными (R) антеннами. Каждая передающая антенна и каждая принимающая антенна может быть физической антенной или набором антенн.
В передатчике 210 ТХ данные и пилотный процессор 212 обрабатывают данные обмена для выработки символов данных, обрабатывает пилот-сигнал для выработки пилотных символов и мультиплексирует пилотные символы с символами данных. ТХ пространственный процессор 214 выполняет пространственную обработку передатчика на символах данных и пилотных символах и обеспечивает Т выходные символьные потоки к Т OFDM модуляторам/передатчикам 216а через 216t. TX пространственный процессор 214 может выполнять прямое MIMO назначение, пространственное распределение, формирование передающей диаграмму направленности и т.д. Каждый символ данных и каждый пилотный символ может быть отправлен от одной антенны (для прямого назначения) или от многоэлементных антенн (для пространственного распределения и формирования диаграммы направленности). Каждый OFDM модулятор/передатчик 216 выполняет OFDM модуляцию на своих выходных символах для выработки выходных чипов и дополнительно обрабатывает выходные чипы для выработки модулированного сигнала. Т модулированные сигналы от передатчиков 216а через 216t передаются от антенн 218а через 218t соответственно.
В приемнике 250 R антенны 252а через 252г принимают Т модулированные сигналы от передатчика 2106 и каждая антенна 252 обеспечивает принятый сигнал соответствующему приемнику/OFDM демодулятору 254. Каждый приемник/OFDM демодулятор 254 обрабатывает свой принятый сигнал для получения импульсов, оценивает и удаляет частотные ошибки в приемнике 2506 и дополнительно выполняет OFDM демодуляцию на импульсах для получения принятых символов. Блок 260 фазовой коррекции обрабатывает принятые символы из OFDM демодуляторов 254а, через 254г оценивает и удаляет фазовые ошибки в каждом символьном периоде, и обеспечивает символы со скорректированной фазой. MIMO детектор 262 выполняет MIMO обнаружение на символах со скорректированной фазой, обеспечивает оцененные пилотные символы и оцененные символы данных. MIMO детектор 262 может выполнять минимальный средний квадрат ошибки (MMSE), обращение в нуль (ZF), последовательную отмену помех (SIC) и некоторые другие способы MIMO обнаружения. Блок 260 фазовой коррекции может оценивать фазовую ошибку, основываясь на принятых символах и/или оцененных символах. Процессор 264 RX данных обрабатывает оцененные символы данных и обеспечивает декодированные данные.
Контроллеры/процессоры 220 и 270 руководят операциями в передатчике 210 и приемнике 250 соответственно. Память 222 и 172 хранит данные и программные коды для передатчика 210 и приемника 250 соответственно.
В OFDM основанной системе OFDM-символ может содержать символы данных на поднесущих данных и/или пилотных символах на пилотных поднесущих. Поднесущая данных является поднесущей, используемой для данных, и пилотная поднесущая является поднесущей, используемой для пилот-сигнала. Фазовая ошибка может быть оценена выполнением скалярного произведения оцененных символов и их известных символов следующим образом:

где S - известный символ, например пилотный символ,
 - оцененный символ, например оцененный пилотный символ, и
- оцененный символ, например оцененный пилотный символ, и
θ - фазовая ошибка между оцененным и известным символами.
В общем, оцененный символ  может быть оцененным пилотным символом или оцененным символом данных. Известный символ S может быть пилотным символом, известным априорно приемнику, или твердым решением оцененного символа данных. Твердым решением обычно является модуляционный символ, являющийся ближним (например, в Евклидовых расстояниях) оцененному символу данных.
может быть оцененным пилотным символом или оцененным символом данных. Известный символ S может быть пилотным символом, известным априорно приемнику, или твердым решением оцененного символа данных. Твердым решением обычно является модуляционный символ, являющийся ближним (например, в Евклидовых расстояниях) оцененному символу данных.
Пилотно-основанная фазовая оценка может быть получена на основе пилотных символах для периода n символа следующим образом:


где pk,m(n) - известный пилотный символ для потока m на поднесущей k,
 - оцененный пилотный символ для потока m на поднесущей k,
- оцененный пилотный символ для потока m на поднесущей k,
βk,m(n) - взвешиваемый коэффициент для потока m на поднесущей k,
Np(k) - число пилотных потоков на поднесущей k,
Кр - число пилотных поднесущих,
Xp(n) - пилотно-основаный фазор для периода n символа,
θp(n) - пилотно-основаная фазовая ошибка.
В уравнении (2) βk,m(n) представляет вес, данный каждому пилотному символу, и может быть определен на основе SNR, каких-либо других показателей качества принятых сигналов и/или других коэффициентов. βk,m(n) может быть также установлен 1 для того, чтобы придать равный вес всем оцененным пилотным символам. Xp(n) равен взвешенной сумме скалярных произведений оцененных пилотных символов и известных пилотных символов. Xp(n) содержит взвешенную среднюю фазовую ошибку между оцененными пилотными символами и известными пилотными символами.
В SISO передаче число пилотных потоков является равным единице для всех пилотных поднесущих, иначе Np(k)=1 для всех k. В MIMO передаче число пилотных потоков может быть равно единице, числу потоку данных, меньшему из Т и R, или зависимому из этих параметров. Число пилотных потоков может отличаться от поднесущей к поднесущей и/или от OFDM символа к OFDM символу.
Число пилотных символов обычно гораздо меньше, чем число символов данных. Фазовая оценка таким образом может быть улучшена с использованием символов данных, как и пилотных символов. Символы данных неизвестны в приемнике. Однако приемник может оценивать переданные символы данных с помощью (1) выполнения обнаружения на принятых символах данных для получения оцененных символов данных и (2) выполнения твердых решений на оцененных символах данных, основываясь на известной скорости передачи данных (так в сигнальных созвездиях), используемой в символах данных. Твердые решения могут быть использованы как переданные символы данных и могут быть сравнены с оцененными символами данных, так же как и пилотные символы.
Фазовая оценка, основанная на данных, может быть получена на основе оцененных символов данных для периода n символа следующим образом:


где  - оцененный символ данных для потока m на поднесущей k,
- оцененный символ данных для потока m на поднесущей k,
 - твердое решение для оцененного символа данных,
- твердое решение для оцененного символа данных,
ND(k) - число потоков данных на поднесущей k,
KD - число поднесущих данных,
Xd(n) - фазор, основанный на данных для периода n символа, и
θd(n) - фазовая ошибка, основанная на данных.
В уравнении (4) Xd(n) представляет взвешенную сумму скалярного произведения оцененных символов данных и твердых решений. Xd(n) содержит взвешенную среднюю фазовую ошибку между оцененными символами данных и твердыми решениями.
В SISO передаче число потоков данных является равным единице для всех поднесущих данных, иначе Np(k)=1 для всех k. В MIMO передаче число потоков данных ограничено сверху меньшей из числа передающих антенн и числом принимающих антенн, иначе ND≤min(Т,R). Число потоков данных может также отличаться от поднесущей к поднесущей и/или от OFDM символа к OFDM символу.
Абсолютная фазовая ошибка может быть получена на основе пилотного символа и символа данных следующим образом:

где µd и µp являются весовыми коэффициентами для символов данных и пилотных символов соответственно, и
θabs(n) является абсолютной фазовой ошибкой, полученной на основе символа данных и пилотного символа.
Абсолютная фазовая ошибка - это фазовая ошибка, наблюдаемая при периоде n символа, и может быть принята как дельта фазы или как моментальная фазовая ошибка.
Весовые коэффициенты µd и µp могут быть выбраны, чтобы дать больший вес более отзывчивой фазовой оценке и меньший вес менее отзывчивой фазовой оценке в процессе объединения. Весовые коэффициенты могут быть установленными величинами или меняющимися величинами, например определяемые оценками SNR. Весовые коэффициенты также могут быть выбраны на основе максимальной степени объединения (MRC) или другой объединенной технологии. Оба коэффициента µd и µp могут быть установлены в единицу, чтобы придать одинаковый вес Xd(n) и Xp(n). µd может быть установлен в ноль, чтобы пренебречь Xd(n), и µp может быть установлен в ноль, чтобы пренебречь Xp(n).
Приемник может оценивать частотную ошибку в приемнике и удалять частотную ошибку перед тем выполнением OFDM демодуляции. Остаточная ошибка в оценке частотной ошибки приводит к фазовому отклонению с течением времени. В каждом периоде символа промежуточная сумма всех предыдущих фазовых коррекций может быть посчитана следующим образом:

где θtotal(n) - полная фазовая ошибка в периоде n символа и αtotal и αabc - масштабирующие коэффициенты для θtotal(n) и θabc(n) соответственно.
θtotal(n) может быть инициализирован в ноль перед первым OFDM символом. θtotal и θabc могут быть определены различные величины на основе желаемых весов для θtotal(n) и θabc(n) соответственно. Например, αtotal И αabc могут быть определены как αtotal=αabc=1, и тогда уравнение (7) будет просто накапливать θabc(N). Альтернативно, αtotal может быть определен как 0≤αtotal≤1, и αabc может быть определен как αabc=1-αtotal. В этом случае уравнение (7) будет осуществлять фильтр бесконечной импульсной характеристики (IIR), с большими величинами для αtotal, соответствующими лучшему фильтрованию, и наоборот.
Структура уравнения (7) суммирует фазы. В другой структуре могут быть сложены комплексные величины, что может привести к более точной оценке, при условии, что некоторая информация может быть потеряна при сложении только фаз.
Принятые символы могут быть скорректированы фазой следующим образом:

где rk,m(n) - принятый символ для потока m на поднесущей k, и
 - символ со скорректированной фазой, соответствующий
- символ со скорректированной фазой, соответствующий
ПРИНЯТОМУ СИМВОЛУ rk,m(n).
Единичная фазовая оценка может быть получена для всех потоков и поднесущих и применена к принятым символам всех потоков и поднесущих, как было описано выше. Альтернативно, фазовая оценка может быть получена для каждого потока или поднесущей и применена к принятым символам этого потока или этой поднесущей. В общем, фазовая оценка может быть получена для любого числа потоков и любого числа поднесущих и применена к принятым символам этих потоков или этих поднесущих. После фазовой коррекции обнаружение и декодирование могут быть выполнены на символах со скорректированной фазой.
Фиг.3 показывает процесс 300 для выполнения фазовой коррекции. Полная фазовая ошибка θtotal(n) и индекс n периода символа инициализированы перед первым OFDM символом, например, θtotal(n)=0 и n=0 (этап 312). Принятые символы от приемника/OFDM демодуляторов 254 для фазового периода n корректируются по фазе с помощью θtotal(n), например, как показано в уравнении (8) (этап 318). Символы со скорректированной фазой обрабатываются (например, обнаруживаются) для получения оцененных пилотных символов и оцененных символов данных (этап 316). Пилотно-основанный фазор Xp(n) вычисляется на основе оцененных пилотных символов, например, как показано в уравнении (2) (этап 318). Фазор, основанный на данных Xd(n), вычисляется на основе оцененных символах данных и их твердых решениях, например, как показано в уравнении (4) (этап 320). Абсолютная фазовая ошибка θabc(n) для пилотных символов и символов данных может быть извлечена на основе фазоров Xp(n) и Xd(n), например, как показано в уравнении (6) (этап 322). Полная фазовая ошибка θtotal(n) обновляется с абсолютной фазовой ошибкой, например, как показано в уравнении (7), и индекс n периода символа возрастает.
Принятые символы из приемника/OFDM демодуляторов 254 являются скорректированными по фазе обновленной полной фазовой ошибкой θtotal(n+1), которая включает в себя фазовую ошибку для текущего периода n символа (этап 326). Символы со скорректированной фазой затем обрабатываются (например, обнаруживаются) для получения новых оцененных символов (этап 328), которые декодируются для получения декодированных данных (этап 330).
На фиг.3 принятые символы обнаруживают/обрабатывают дважды на двух стадиях. На первой стадии принятым символам из приемника/OFDM демодуляторов 254 сначала корректируют фазу с текущей θtotal(n), затем определяют θabc(n) и используют для обновления etotai(n) для получения θtotal(n+1). На второй стадии принятым символам из приемника/OFDM демодуляторов 254 снова корректируют фазу с обновленной θtotal(n+1), полученной на первой стадии, которая должна быть более точная, нежели θtotal(n), используемая на первой стадии. Первое обнаружение на этапе 316 для первой стадии обеспечивает оцененные пилотные символы и оцененные символы данных, используемые для вычисления Xp(n) и Xd(n). Второе обнаружение на этапе 328 для второй стадии обеспечивает новые оцененные символы данных для декодирования.
Фиг.4 показывает процесс 400 для выполнения коррекции фазы путем выполнения одноразового обнаружения. Полная фазовая ошибка θtotal(n) и индекс n периода символа инициализируют до первого OFDM символа, например θtotal(n)=θpre и n=0 (этап 412). θpre может быть фазовой оценкой, полученной от одного или более OFDM символов, предшествующих первому OFDM символу, несущему данные, например OFDM символы для вступления, MIMO пилот-сигнала, и т.д.
Принятым символам для периода n символа корректируют фазу с помощью θtotal(n) (этап 414). Символы со скорректированной фазой обрабатываются (например, обнаруживаются) для получения оцененных пилотных символов и оцененных символов данных (этап 416). Пилотно-основанный фазор Xp(n) вычисляют на основе оцененных пилотных символов (этап 418). Фазор Xd(n), основанный на данных, вычисляют на основе оцененных символов данных и их твердых решениях (этап 420). Абсолютная фазовая ошибка θabc(n) может быть получена на основе фазоров Xp(n) и Xd(n) (этап 422). Полная фазовая ошибка θtotal(n) обновляется с абсолютной фазовой ошибкой, и индекс n символьного периода увеличивается (этап 424). Оцененные символы данных декодируются для получения декодированных данных (этап 426).
На фиг.4 фазовая коррекция выполняется на принятых символах на основе полной фазовой ошибки, полученной в приоритетном периоде символа. Пилотно-основанные и основанные на данных фазовые оценки получают на основе оцененных пилотных символов и оцененных символов данных. Полная фазовая ошибка обновляется с фазовой ошибкой и используется в следующем периоде символа. Принятые символы не корректируют на основе обновленной полной фазовой ошибки, чтобы избежать второе обнаружение.
В другом варианте осуществления у принятых пилотных символов корректируют фазу с помощью полной фазовой ошибки и производят обнаружение. Пилотно-основанный фазор Xp(n) и пилотно-основанную фазовую ошибку θp(n) получают на основе оцененных пилотных символов. Полную фазовую ошибку θtotal(n) обновляют с θp(n), у принятых пилотных символов корректируют фазу с помощью полной фазовой ошибки и производят обнаружение. Фазор Xd(n), основанный на данных, и фазовую ошибку θd(n), основанную на данных, получают на основе оцененных символов данных. Полную фазовую ошибку θtotal(n) обновляют снова с θd(n). В этом варианте осуществления принятые символы данных корректируют с помощью пилотно-основанной фазовой ошибки θp(n), полученной в текущем периоде символа, и фазовую ошибку θd(n) используют в следующем периоде символа.
В еще одном варианте осуществления этапы 412 через 424 выполняются, как показано выше для фиг.4, для получения оцененных символов данных. Фазы оцененных символов данных корректируются с помощью θabc(n) для получения оцененных символов данных со скорректированной фазой, которые декодируют для получения декодированных данных. Этот вариант осуществления удаляет фазовую ошибку после обнаружения, основанную на данных.
Методы фазовой коррекции, описанные здесь, могут быть использованы для различных сетей беспроводной связи, таких как WLAN, которые осуществляют семейство стандартов IEEE 802.11, разработанных Институтом Электрических и Электронных Инженеров (IEEE) для WLAN. IEEE 802.11, IEEE 802.11а, IEEE 802. 11b, IEEE 802.11g и IEEE 802.11n охватывают различные радиотехнологии и имеют различные возможности. Для ясности, методы, описанные выше для WLAN, осуществленных по IEEE 802.11а, IEEE 802. 11g и/или IEEE 802.11n, все из которых используют OFDM.
IEEE 802.11a/g использует структуру поднесущей, которая разделяет диапазон частот системы на К=64 поднесущих, которые подписываются показателями от -32 до +31. Эти 64 полные поднесущие включают в себя 48 поднесущие данных с показателями ±{1, …, 6, 8, …, 20, 22, …26} и четыре пилотные поднесущие с показателями ±{7,21}. DC поднесущие с индексом 0 и оставшиеся поднесущие не используются. Структура поднесущих описана в IEEE стандарте 802.11а, озаглавленном «Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (РНУ) Specifications: High-speed Physical Layer in the 5 GHz Band,» сентябрь 1999, публично доступном. 802.lln использует структуру поднесущей с 64 полными поднесущими, которые включают в себя 52 поднесущих данных с показателями ±{1, …, 6, 8, …, 20, 22, …, 28 } и четыре пилотные поднесущие с показателями ±{7,21}.
Фиг.5 показывает формат 500 данных, определенный IEEE 802.11a/g. В физическом слое (PHY) данные обрабатываются и передаются в PHY блоки протокольных данных (PPDU). Каждый PPDU 510 включает в себя вступительную секцию 520, сигнальную секцию 530 и секцию 540 данных. Вступительная секция 520 несет десять коротких тренировочных символов в первых двух OFDM символах, следующих после двух продолжительных тренировочных символов в следующих двух OFDM символах. Короткие тренировочные символы вырабатывают на основе набора из 12 пилотных символов, отображаемых в наборе из 12 поднесущих, как описано в 802.11a/g. Длинные тренировочные символы вырабатывают на основе набора из 52 пилотных символов, отображаемых в наборе из 52 поднесущих, также как описано в 802.11a/g. Сигнальная секция 530 несет один OFDM символ, сигнализирующий для PPDU. Секция 540 данных несет переменное число OFDM символов для данных. Сигнализацию и данные посылают на 48 поднесущих данных в сигнальную секцию 530 и в секцию 540 данных соответственно. Следящий пилот-сигнал посылают на четырех пилотных поднесущих в каждый OFDM символ с сигнальными секциями и секциями данных. Пилотные символы для каждой пилотной поднесущей вырабатывают на основе известной последовательности псевдослучайных чисел (PN).
Для 802.11n MIMO пилотную секцию вставляют между сигнальной секцией 530 и секцией 540 данных и несут MIMO пилот-сигнал, используемый для оценки MIMO канала.
Фиг.6 показывает вариант исполнения OFDM демодулятора 600, который может быть использован в приемнике/OFDM демодуляторе 154 на фиг.1 и также в каждом из приемников/OFDM демодуляторов 254а-254 г на фиг.2.
Вместе с OFDM демодулятором 600 оценщик 610 частотной ошибки оценивает частотную ошибку в приемнике (например, на основе длинных и/или коротких тренировочных символов в принятом PPDU) и обеспечивает оценку ferr частотной ошибки. Блок 612 частотной коррекции удаляет фазовый наклон из-за частотной ошибки следующим образом:

где x(t) - принятая выборка для периода t выборки,
Tsym - один период выборки, и
 - выборка со скорректированной частотой для периода t выборки.
- выборка со скорректированной частотой для периода t выборки.
Блок 614 захвата отсчета времени определяет время принятого PPDU, например, на основе длинных и/или коротких тренировочных символов. Блок 614 также принимает оценку частотной ошибки и устанавливает время для подсчета частотной ошибки. В приемнике выборочный счетчик, используемый для оцифровки, и сигнал гетеродина (LO), используемый для понижения частоты, могут быть выработаны на основе единичного гетеродина. В этом случае частотная ошибка в генераторе опорного сигнала вызывает как частотную ошибку в LO сигнале, так и ошибку отсчета времени в выборочном счетчике. Следовательно, частотная ошибка в z частей на миллион (ppm) соответствует ошибке отсчета времени в z ppm. Блок 614 может определять ошибку отсчета времени на выборку, исходя из частотной ошибки, и вычислять общую ошибку отсчета времени в каждом периоде символа путем суммирования ошибок отсчета времени на выборку за все время.
Принятый OFDM символ содержит К+С выборок, где С - длина циклического префикса. Для OFDM демодуляции блок 614 вырабатывает FFT окно, которое выбирает К выборки из К+С выборок. Когда общая ошибка отсчета времени превышает ±1 период выборки, ±1 период выборки может быть вычтен из общей ошибки отсчета времени и FFT окно может быть сдвинуто вверх на один период выборки (при +) или вниз на один период выборки (при -). Это держит FFT окно с одной выборкой от начального времени. С частотной ошибкой в 40 ppm для генератора опорного сигнала общая ошибка отсчета времени может быть половиной от короткого тренировочного символа в 5 миллисекундах (мс). Этот временной сдвиг может быть скорректирован для улучшения характеристик, особенно для длинных пакетов, поддерживаемых IEEE 802.11n.
Блок 616 удаления цикличного префикса получает выборки со скорректированной частотой от блока 612 и FFT окно от блока 614. Для каждого принятого OFDM символа блок 616 удаляет цикличный префикс и обеспечивает К выборки с FFT окном. Блок 618 FFT выполняет К-точку FFT на выборках со скорректированной частотой от блока 616 и обеспечивает принятые символы для К общих поднесущих.
Фиг.7 показывает вариант осуществления блока 700 фазовой коррекции. В каждом периоде символа блок 710 фазовой коррекции получает принятые пилотные символы pk,m(n) для следящего пилотного сигнала и начальную фазовую ошибку θinit(n), которая может быть фазовой ошибкой Oc(n-1), приложенной к принятым символам данных в предыдущем периоде символа, суммарной фазовой ошибкой, нулем или другим значением. Блок 710 удаляет фазовую ошибку θinit(n) из принятых пилотных символов и обеспечивает пилотные символы со скорректированной фазой. Детектор 612 выполняет обнаружение на пилотных символах со скорректированной фазой и обеспечивает оцененные пилотные символы  Фазовый оценщик 714 извлекает пилотно-основанный фазор Xp(n) на основе оцененных пилотных символов. Блок 716 вычисления фазовой ошибки принимает Xp(n) и обеспечивает текущую фазовую ошибку θс (n) для текущего периода символа.
Фазовый оценщик 714 извлекает пилотно-основанный фазор Xp(n) на основе оцененных пилотных символов. Блок 716 вычисления фазовой ошибки принимает Xp(n) и обеспечивает текущую фазовую ошибку θс (n) для текущего периода символа.
Блок 720 коррекции фазы получает принятые символы данных dk,m(n) и текущую фазовую ошибку θс(n), удаляет текущую фазовую ошибку из принятых символов данных и обеспечивает символы данных со скорректированной фазой. Детектор 722 выполняет обнаружение на символах данных со скорректированной фазой и обеспечивает оцененные символы данных  Фазовый оценщик 724 извлекает фазор Xd(n), основанный на данных, основываясь на оцененных символах данных. Блок 716 вычисления принимает Xd(n) и обновляет общую фазовую ошибку.
Фазовый оценщик 724 извлекает фазор Xd(n), основанный на данных, основываясь на оцененных символах данных. Блок 716 вычисления принимает Xd(n) и обновляет общую фазовую ошибку.
Блоки 712 и 722 могут быть частью детектора 162 данных/пилот-сигналов на фиг.1 или MIMO детектором 262 на фиг.2. Оставшиеся блоки на фиг.7 могут быть частью блока 160 фазовой коррекции на фиг.1 или блоком 260 фазовой коррекции на фиг.2.
Пилотно-основанный фазор Xp(n) может быть получен на основе оцененных пилотных символов и использован для извлечения текущей фазовой ошибки θc(n). Принятые символы данных могут быть скорректированы по фазе с помощью θс(n) и обнаружены для получения оцененных символов данных. Фазор Xd(n), основанный на данных, затем может быть получен на основе оцененных символов данных и использован для определения фазовой ошибки для следующего периода символа. Пилотно-основанная фазовая оценка может быть использована для текущего OFDM символа, тогда как фазовая оценка, основанная на данных, может быть использована для следующего OFDM символа. Оценка и коррекция фазовой ошибки могут быть выполнены и другими методами.
Вычисление фазовой ошибки в блоке 716 может быть выполнено различными методами. Вычисление фазовой ошибки может быть выполнено, как описано выше в уравнениях с (2) по (7). Вычисление фазовой ошибки может быть также выполнено с использованием фазоров (или комплексных величин) для фазовых оценок, как описано выше. Фазоры поддерживают простое наибольшее соотношение объединения фазовых оценок от различных источников, так что наиболее надежные фазовые оценки весят больше в процессе объединения. При представлении фазовых оценок с использованием фазоров амплитуда фазора может отражать взвешивание соответствующей фазовой оценки. Вычисление фазоров включает в себя SNR информацию, так что точность/надежность фазовых оценок отражается напрямую в амплитуде фазора. Фазовая ошибка может быть извлечена суммированием фазоров и определением угла результирующей, как описано выше.
Пилотно-основанный фазор Xp(n) может быть извлечен на основе оцененных пилотных символов, например, как показано в уравнении (2). Текущий фазор и соответствующая текущая фазовая ошибка могут быть определены следующим образом:


где Xp(n) - фазор, полученный от следящего пилот-сигнала в текущем периоде символа,
Xt(n) - общий фазор, полученный в предыдущем периоде символа,
Xc(n) - текущий фазор для текущего периода символа,
α - масштабирующий коэффициент, и
 - пилотная вводимая коррекция.
- пилотная вводимая коррекция.
Общий фазор Xt(n) является комплексной величиной, имеющей амплитуду, отнесенную к стандартному отклонению фазовой ошибки. Xt(n) может быть инициализирован, как Xt(n)=Ainit+J0, где Ainit является амплитудой, которая может зависеть от уровня фазового шума, остаточной частотной ошибки, времени между центром преамбулы или MIMO пилот-сигналом и центра первого OFDM символа в сигнальной секции и т.д.
В уравнении (10) текущий фазор Xc(n) является взвешенной суммой пилотно-основанного фазора Xp(n) и общего фазора Xt(n). Масштабирующий коэффициент а определяет вес, данный общему фазору Xt(n) при вычислении текущего фазора Xc(n), а может быть выбран на основе частотной ошибки и фазового шума осциллятора в приемнике. Например, малое значение может быть использовано для а, если фазовый шум является большим и/или если предыдущая информация является не надежной, и наоборот, а может быть установлен в одно значение изначально и в другое значение после предопределенного числа OFDM символов, α может быть установлен в нуль для использования только пилотных символов в фазовой коррекции. Пилотная вводимая коррекция  является фазором величины блока, компенсирующим систематичную ошибку фазовой оценки следящего пилот-сигнала, и может быть определена как описано выше. может быть установлена в нуль для использования только оцененных символов данных в фазовой коррекции. Текущий фазор Xc(n) используется для фазовой коррекции символов данных в текущем периоде символа.
является фазором величины блока, компенсирующим систематичную ошибку фазовой оценки следящего пилот-сигнала, и может быть определена как описано выше. может быть установлена в нуль для использования только оцененных символов данных в фазовой коррекции. Текущий фазор Xc(n) используется для фазовой коррекции символов данных в текущем периоде символа.
Фазор Xd(n), основанный на данных, может быть извлечен на основе оцененных символов данных, например, как показано в уравнении (4). Xd(n) может быть также извлечен таким образом, как SNR и группировка сигнала. Число ошибок твердых решений зависит от SNR и может быть значимым при низком SNR, особенно для кодовой скорости, равной 1/2. Ошибки твердых решений могут происходить в случае, когда средняя фазовая ошибка является меньше в абсолютном значении, чем в действительном значении. Уровень смещения в средней фазовой ошибке зависит от SNR и группировки сигнала. Это смещение может быть скорректировано уменьшением масштаба действительной части фазора относительно мнимой части.
Скалярное произведение оцененного символа данных и его твердого решения может быть выражено

где wk,m(n) - масштабированное скалярное произведение оцененного символа данных  с твердым решением
с твердым решением  Масштабирующий коэффициент βk,m(n) может быть основан на SNR и других коэффициентах.
Масштабирующий коэффициент βk,m(n) может быть основан на SNR и других коэффициентах.
Фазор Xd(n), основанный на данных, может быть выражен как

где µi и µq - масштабирующие коэффициенты для действительной и мнимой частей соответственно.
Масштабирующие коэффициенты µi и µq могут быть выбраны на основе SNR для каждого потока и поднесущей, группировки сигнала и т.д. Использование двух разных масштабирующих коэффициентов для действительной и мнимых частей завершает как коррекцию смещения, так и объединение с наибольшим соотношением. µi и µq могут также зависеть от местоположения символа модуляции. Например, символы модуляции на краях группировок сигналов обычно имеют меньшее число соседей, могут быть более надежными, и им могут быть даны большие веса, поскольку символы модуляции, удаленные от краев, обычно имеют меньшее число соседей, могут быть менее надежными, и им могут быть даны меньшие веса.
Абсолютная фазовая ошибка принятых символов данных, которая является фазовой ошибкой до фазовой коррекции в блоке 720, может быть получена следующим образом:

где  - нормализированный (величина блока) вариант,
- нормализированный (величина блока) вариант,
Xc(n), и
Xdu(n) - фазор для абсолютной фазовой ошибки символов данных.
Фазор Xd(n), основанный на данных, получают после фазовой коррекции в блоке 720. Фазовую ошибку до этой фазовой коррекции получают путем обратного добавления фазовой коррекции блоком 720. Это достигается умножением Xd(n) на  который поворачивает
который поворачивает  на угол Xc(n).
на угол Xc(n).
Общий фазор может быть определен следующим образом:

В уравнении (15) абсолютную фазовую ошибку символов данных объединяют с текущей фазовой ошибкой для получения общей фазовой ошибки, причем объединение выполняют с фазорами для достижения объединения с наибольшим отношением.
Пилотная вводимая коррекция  компенсирует систематичную ошибку фазовой оценки следящего пилот-сигнала и может быть определена, как описано выше. Фазовая разница между абсолютным фазором Xdu(n) и пилотно-основанным фазором Xp(n) может быть вычислена и суммирована следующим образом:
компенсирует систематичную ошибку фазовой оценки следящего пилот-сигнала и может быть определена, как описано выше. Фазовая разница между абсолютным фазором Xdu(n) и пилотно-основанным фазором Xp(n) может быть вычислена и суммирована следующим образом:

где L - число периодов символа для суммирования и может быть любым целым значением.
Суммирование в уравнении (16) может быть выполнено с L периодами символа в начале передачи, и результат может быть использован для оставшейся части передачи. Действующее суммирование может также выполняться для получения Yp. Yp затем нормализуют для получения , которую используют для коррекции пилотно-основанного фазора Xp(n) в уравнении (10).
Фиг.8 показывает вариант осуществления блока 716 вычисления фазовой ошибки на фиг.7. Умножитель 812 умножает пилотно-основанный фазор Xp(n) на пилотную вводимую коррекцию . Умножитель 826 умножает общий фазор Xt(n) на масштабирующий коэффициент α. Сумматор 814 складывает выходные значения умножителей 812 и 826 и обеспечивает текущий фазор Xc(n), как показано в уравнении (10). Блок 816 вычисляет фазу Xc(n), как показано в уравнении (11), и обеспечивает текущую фазовую коррекцию θс(n) для текущего периода символа.
Блок 818 нормализирует Xc(n) и обеспечивает  Умножитель 820 умножает фазор Xd(n), основанный на данных на
Умножитель 820 умножает фазор Xd(n), основанный на данных на  , и обеспечивает абсолютный фазор Xdu(n), как показано в уравнении (14). Сумматор 822 складывает текущий фазор Xc(n) с абсолютным фазором Xdu(n) и обеспечивает обновленный общий фазор Xt(n+1) для следующего периода символа, как показано в уравнении (15). Регистр 824 сохраняет общий фазор для использования в следующем периоде символа.
, и обеспечивает абсолютный фазор Xdu(n), как показано в уравнении (14). Сумматор 822 складывает текущий фазор Xc(n) с абсолютным фазором Xdu(n) и обеспечивает обновленный общий фазор Xt(n+1) для следующего периода символа, как показано в уравнении (15). Регистр 824 сохраняет общий фазор для использования в следующем периоде символа.
Блок 828 принимает пилотно-основанный фазор Xp(n) и обеспечивает сопряженный фазор Xp*(n). Умножитель 830 умножает выходное значение блока 828 на абсолютный фазор Xdu(n). Сумматор 832 суммирует выходные значения умножителя 830 L периодов символов и обеспечивает фазор Yp, как показано в уравнении (16).
Блок 834 нормализирует Yp и обеспечивает .
Фиг.9 показывает процесс 900 для выполнения фазовой коррекции. Общий фазор Xt(n) и индекс n периода символа инициализируют до первого OFDM символа (этап 912). Принятые пилотные символы для периода n символа могут быть скорректированы по фазе с помощью начальной фазовой ошибкой (этап 914). Пилотные символы со скорректированной фазой обрабатывают (например, обнаруживают) для получения оцененных пилотных символов (этап 916). Пилотно-основанный фазор Xp(n) вычисляют на основе оцененных пилотных символов (этап 918). Текущий фазор Xc(n) определяют на основе пилотно-основанного фазора Xp(n) и общего фазора Xt(n), например, как показано в уравнении (10) (этап 920). Текущую фазовую ошибку θс(n) вычисляют на основе текущего фазора Xc(n) (этап 922).
Принятые символы данных для периода n символа корректируют по фазе с помощью текущей фазовой ошибки θс(n) (этап 924). Символы данных со скорректированной фазой обрабатывают (например, обнаруживают) для получения оцененных символов данных (этап 926). Фазор Xd(n), основанный на данных, вычисляют на основе оцененных символов данных и их твердых решений, например, как показано в уравнениях (12) и (13) (этап 928). Общий фазор обновляют фазором Xd(n), основанным на данных, и текущим фазором Xc(n), например, как показано в уравнениях (14) и (15) (этап 930). Оцененные символы данных декодируют (этап 932).
Фиг.10 показывает процесс 1000 для выполнения фазовой коррекции. Принятые пилотные символы обрабатывают (например, обнаруживают) для получения оцененных пилотных символов (этап 1012). Пилотно-основанный фазор Xp(n) вычисляют на основе оцененных пилотных символов (этап 1014) и используют для извлечения пилотно-основанной фазовой ошибки θp(n) (этап 1016). Принятые символы данных корректируют по фазе с помощью θp(n) (этап 1018) и обрабатывают (например, обнаруживают) для получения оцененных символов данных (этап 1020). Фазор Xd(n), основанный на данных, вычисляют затем на основе оцененных символов данных (этап 1022). Оцененные символы данных затем корректируют на основе фазора, основанного на данных (этап 1024), следующим образом:

где  - оцененный символ данных со скорректированной фазой. Оцененные символы данных со скорректированной фазой декодируют (этап 1026).
- оцененный символ данных со скорректированной фазой. Оцененные символы данных со скорректированной фазой декодируют (этап 1026).
На фиг.10 фазовая коррекция осуществляется независимо в каждом периоде символа. Никакая фазовая информация не передается от одного периода символа другому.
Фиг.3, 4, 9 и 10 показывают некоторые примеры выполнения фазовой коррекции, используя как пилотные символы, так и символы данных. Фазовая коррекция может быть выполнена также и другими методами.
Фиг.11 показывает процесс 1100 выполнения фазовой коррекции. Принятые пилотные символы и принятые символы данных получают из OFDM и/или MIMO передачи (этап 1112). Первую фазовую информацию получают на основе принятых пилотных символов (этап 1114). Вторую фазовую информацию получают на основе принятых символов данных (этап 1116). Первая и вторая фазовые информации могут быть получены различными методами и могут быть представлены в различных формах. Фаза принятых символов данных корректируется на основе первой и второй фазовых информаций (этап 1118). Фазовая коррекция может использовать первую и вторую фазовые информации напрямую и/или ненапрямую и может быть выполнена в один или более этапов. Например, первая фазовая информация может быть применена к символам данных, и вторая фазовая информация может быть применена к пилотным символам. Вторая фазовая информация будет влиять на первую фазовую информацию и таким образом будет применена к символам данных ненапрямую через пилотные символы. Время также может быть задано на основе первой и/или второй фазовых информаций.
Для этапа 1114 фаза принятых пилотных символов может быть скорректирована, например, начальной фазовой ошибкой, которая может быть фазовой ошибкой для предыдущего периода символа, нулем или каким-нибудь другим значением. Обнаружение может быть выполнено на пилотных символах со скорректированной фазой для получения оцененных пилотных символов. Скалярные произведения оцененных пилотных символов и известных пилотных символов могут быть вычислены, взвешены масштабирующими коэффициентами, которые могут зависеть от оценок SNR и/или других коэффициентов для разных поднесущих и потоков, и объединены для получения первой фазовой информации. Для этапа 1116 фаза принятых символов данных может быть скорректирована, например, с помощью первой фазовой информации. Обнаружение может быть выполнено на символах данных со скорректированной фазой для получения оцененных символов данных. Твердые решения могут быть получены для оцененных символов данных. Скалярные произведения оцененных символов данных и твердых решений могут быть вычислены, взвешены с помощью масштабирующих коэффициентов, которые могут зависеть от SNR и/или других коэффициентов, и объединены для получения второй фазовой информации. Первая и вторая фазовые информации могут быть получены другими методами.
Этап 1118 может быть выполнен другими методами. В одной схеме фаза принятых пилотных символов корректируется на основе второй фазовой информации (например, от предыдущего периода символа), первую фазовую информацию получают на основе пилотных символов со скорректированной фазой, и фаза принятых символов данных корректируется на основе первой фазовой информации. В другой схеме фаза принятых символов данных корректируется на основе первой фазовой информации, обнаружение выполняют на символах данных со скорректированной фазой для получения оцененных символов данных, вторую фазовую информацию получают на основе оцененных символов данных и фазу оцененных символов данных корректируют на основе второй фазовой информации, например, как показано на фиг.10. В еще одной схеме первую и вторую фазовые информации объединяют для получения объединенной фазовой информации и фазу принятых символов данных корректируют на основе объединенной фазовой информации, например, как показано на фиг.3 и 4. Фазовая коррекция для символов данных также может быть выполнена другими методами.
Фиг.12 показывает устройство 1200 для выполнения фазовой коррекции. Устройство 1200 включает в себя средство для получения принятых пилотных символов и принятых символов данных от OFDM и/или MIMO передачи (модуль 1212), средство для получения первой фазовой информации, основанной на принятых пилотных символах (модуль 1214), средство для получения второй фазовой информации, основанной на принятых символах данных (модуль 1216), и средство для коррекции фазы принятых символов данных, основанных на первой и второй фазовых информациях (модуль 1218). Модули с 1212 по 1218 могут содержать процессоры, электронные устройства, устройства аппаратного обеспечения, электронные компоненты, логические схемы, устройства памяти и т.д. или любое их комбинирование.
Оценка частотной ошибки из блока 610 на фиг.6 обычно имеет некоторую ошибку, и эта остаточная частотная ошибка вызывает фазовый наклон по времени. Фазовая ошибка может быть суммирована по всей принятой передаче (например, принятому пакету), и суммированная фазовая ошибка может быть использована для оценки остаточной частотной ошибки. Оценка остаточной частотной ошибки может быть предоставлена блокам 610 и 614 на фиг.6 и использована для коррекции частотной ошибки, так и ошибки отсчета времени в принятых выборках.
Методики фазовой коррекции используют фазовую информацию от различных источников, таких как пилотные символы, символы данных и так далее. Фазовая информация от пилотных символов и символов данных предоставляет точную оценку остаточной частотной ошибки и может быть использована для фазовой коррекции в различных методах, некоторые из которых описаны выше. Фазовая информация от пилотных символов и символов данных в разных периодах символа может быть объединена разными способами. Взвешенное значение фазовой коррекции может быть извлечено на основе фазовой информации от разных источников, поднесущих, потоков и периодов символа и использовано для фазовой коррекции в текущем периоде символа. Фазовая информация от символов данных может быть использована в текущем и следующем периоде символа, зависящем от задержки, обработки и других факторов.
Методики, описанные здесь выше, могут быть полезными, когда остаточная частотная ошибка вызывает фазовый наклон по времени. Методики также могут быть полезными для фазовой ошибки, которая не растет со временем, например, фазовая ошибка, которая может быть различной от одного OFDM символа к другому, такая как фазовый шум. Методики могут быть использованы для различного числа потоков, которые могут иметь одни и те же или разные скорости, например отдельная скорость, приложенная независимо к каждому потоку.
Методики фазовой коррекции, описанные здесь, могут быть осуществлены различными методами. Например, эти методики могут быть осуществлены аппаратно, программно-аппаратно, программно или их комбинации. При аппаратном осуществлении блоки обработки, используемые для выполнения фазовой коррекции, могут быть реализованы в составе одной или более прикладных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов(DSPD), программируемых логических устройств (PLD), программируемых вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, электронных устройств, других блоков, спроектированных с возможностью выполнения функций, описанных здесь, компьютера или их комбинации.
При программно-аппаратной и/или программной реализации методики могут быть реализованы в модулях (например, процедурах, функциях и т.п.), которые выполняют функции, описанные здесь. Программно-аппаратные и/или программные инструкции могут быть сохранены в памяти (например, в памяти 172 с фиг.1 или в памяти 272 с фиг.2) и исполняться процессором (например, процессором 170 или 270). Память может быть реализована в составе процессора или вне процессора.
Предшествующее описание раскрытия предоставлено, чтобы позволить любому специалисту в данной области техники сделать или использовать раскрытие. Различные модификации раскрытия будут очевидны специалистам в данной области техники, а характерные принципы, определенные здесь, могут быть применены к другим вариациям без отстранения от духа или объема раскрытия. Таким образом, раскрытию не предназначено ограничение примерами, описанными здесь, но должно быть предоставлено широчайшим объемом, согласующимся с принципами и новыми характеристиками, раскрытыми здесь.









Изобретение относится к связи и может использоваться для фазовой коррекции в системах беспроводной связи. Достигаемый технический результат - удаление фазовых ошибок. Предложены способ и устройство выполнения фазовой коррекции для беспроводной связи. Принятые пилотные символы и принятые символы данных могут быть получены из передачи с мультиплексированием с ортогональным частотным разделением каналов (OFDM) и/или передачи с множественными входами/выходами (MIMO). Первую фазовую информацию получают, основываясь на принятых пилотных символах от первого набора поднесущих в текущем периоде символа, вторую фазовую информацию получают от принятых символов данных от второго набора поднесущих в текущем периоде символа, корректируют фазу принятых символов данных в текущем периоде символа на основе первой фазовой информации, корректируют фазу принятых символов данных в последующем периоде символа, основываясь на второй информации о фазовой ошибке. 13 н. и 38 з.п. ф-лы, 12 ил.
1. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих в текущем периоде символа, получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих в текущем периоде символа, коррекции фазы принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации, и коррекции фазы принятых символов данных в последующем периоде символа, основываясь на второй информации о фазовой ошибке; и память, соединенную с, по меньшей мере, одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью выполнения демодуляции OFDM на выборках для получения принятых пилотных символов от первого набора поднесущих и принятых символов данных от второго набора поднесущих.
3. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых пилотных символов, получения первой фазовой информации, основываясь на фазе скорректированных пилотных символов, и коррекции фазы принятых символов данных, основываясь на первой фазовой информации.
4. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых символов данных, основываясь на первой фазовой информации, выполнения обнаружения на символах данных скорректированной фазой для получения оцененных символов данных, получения второй фазовой информации, основываясь на оцененных символах данных, и коррекции фазы оцененных символов данных, основываясь на второй фазовой информации.
5. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью объединения первой и второй фазовых информации для получения объединенной фазовой информации и коррекции фазы принятых символов данных, основываясь на объединенной фазовой информации.
6. Устройство по п.5, в котором, по меньшей мере, один процессор выполнен с возможностью масштабирования первой и второй фазовых информации и объединения масштабированных первой и второй фазовых информации для получения объединенной фазовой информации.
7. Устройство по п.5, в котором, по меньшей мере, один процессор выполнен с возможностью представления первой фазовой информации с первой комплексной величиной, имеющей первую амплитуду, показывающую надежность первой фазовой информации, представления второй фазовой информации со второй комплексной величиной, имеющей вторую амплитуду, показывающую надежность второй фазовой информации, и объединения первой и второй фазовых информации, основываясь на первой и второй комплексных величинах.
8. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью представления первой фазовой информации с первой фазовой величиной и с возможностью представления второй фазовой информации со второй фазовой величиной.
9. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью представления первой фазовой информации с первой комплексной величиной и с возможностью представления второй фазовой информации со второй комплексной величиной.
10. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью получения оцененных пилотных символов, основываясь на принятых пилотных символах, и суммирования скалярных произведений оцененных пилотных символов и известных пилотных символов для получения первой фазовой информации.
11. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью получения оцененных пилотных символов, основываясь на принятых пилотных символах, получения оценки отношения сигнал-шум (ОСШ, SNR) для первого набора поднесущих, определения скалярных произведений оцененных пилотных символов и известных пилотных символов, масштабирования скалярных произведений на масштабирующие коэффициенты, определенные, основываясь на оценках SNR, и объединения масштабированных скалярных произведений для получения первой фазовой информации.
12. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых пилотных символов, выполнения обнаружения скорректированных по фазе пилотных символов для получения оцененных пилотных символов и суммирования скалярных произведений оцененных пилотных символов и известных пилотных символов для получения первой фазовой информации.
13. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью получения оцененных символов данных, основываясь на принятых символах данных, и суммирования скалярных произведений оцененных символов данных и твердых решений оцененных символов данных для получения второй фазовой информации.
14. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью получения оцененных символов данных, основываясь на принятых символах данных, получения оценки отношения сигнал-шум (ОСШ, SNR) для второго набора поднесущих, определения скалярных произведений оцененных символов данных и твердых решений для оцененных символов данных, масштабирования скалярных произведений на масштабирующие коэффициенты, определенные, основываясь на оценках SNR, и объединения масштабированных скалярных произведений для получения второй фазовой информации.
15. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых символов данных, выполнения обнаружения символов данных со скорректированной фазой для получения оцененных символов данных, с возможностью получения твердых решений оцененных символов данных, и суммирования скалярных произведений оцененных символов данных и твердых решений для получения второй фазовой информации.
16. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью настройки отсчета времени, основываясь на первой фазовой информации, или на второй фазовой информации, или на той и другой.
17. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее, по меньшей мере, один процессор, выполненный с возможностью получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих, получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих, и коррекции фазы принятых символов данных, основываясь на первой и второй фазовых информациях, причем, по меньшей мере, один процессор выполнен с возможностью определения полной ошибки отсчета времени, основываясь на первой фазовой информации, или на второй фазовой информации, или на той и другой, с возможностью ускорения отсчета времени, если полная ошибка отсчета времени превысит первую величину, и с возможностью замедления отсчета времени, если полная ошибка отсчета времени упадет ниже второй величины; и память, соединенную с, по меньшей мере, одним процессором.
18. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью оценки частотной ошибки в устройстве и коррекции частотной ошибки до получения первой и второй фазовых информаций.
19. Способ выполнения фазовой коррекции для беспроводной связи, содержащий этапы, на которых: получают в устройстве беспроводной связи первую фазовую информацию, основываясь на принятых пилотных символах от первого набора поднесущих в текущем периоде символа;
получают в устройстве беспроводной связи вторую фазовую информацию, основываясь на принятых символах данных от второго набора поднесущих в текущем периоде символа; и корректируют посредством процессора устройства беспроводной связи фазу принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
20. Способ по п.19, в котором этапы, на которых получают первую фазовую информацию, получают вторую фазовую информацию и корректируют фазу принятых символов данных, содержат этапы на которых: корректируют фазу принятых пилотных символов, получают первую фазовую информацию, основываясь на пилотных символах со скорректированной фазой, и корректируют фазу принятых символов данных, основываясь на первой фазовой информации.
21. Способ по п.19, в котором этапы, на которых получают первую фазовую информацию, получают вторую фазовую информацию и корректируют фазу принятых символов данных, содержат этапы на которых: корректируют фазу принятых символов данных, основываясь на первой фазовой информации, выполняют обнаружение на символах данных со скорректированной фазой для получения оцененных символов данных, получают вторую фазовую информацию, основываясь на оцененных символах данных, и корректируют фазу оцененных символов данных, основываясь на второй фазовой информации.
22. Способ по п.19, в котором этап, на котором корректируют фазу принятых символов данных, содержит этапы на которых: объединяют первую и вторую фазовые информации для получения объединенной фазовой информации и корректируют фазу принятых символов данных, основываясь на объединенной фазовой информации.
23. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: средство получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих в текущем периоде символа; средство получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих в текущем периоде символа; и
средство коррекции фазы принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
24. Устройство по п.23, в котором средство получения первой фазовой информации, средство получения второй фазовой информации и средство коррекции фазы принятых символов данных содержат: средство коррекции фазы принятых пилотных символов, средство получения первой фазовой информации, основываясь на пилотных символах со скорректированной фазой, и средство коррекции фазы принятых символов данных, основываясь на первой фазовой информации.
25. Устройство по п.23, в котором средство получения первой фазовой информации, средство получения второй фазовой информации и средство коррекции фазы принятых символов данных содержат: средство коррекции фазы принятых символов данных, основываясь на первой фазовой информации, средство выполнения обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных, средство получения второй фазовой информации, основываясь на оцененных символах данных, и средство коррекции фазы оцененных символов данных, основываясь на второй фазовой информации.
26. Устройство по п.23, в котором средство коррекции фазы принятых символов данных содержит:
средство объединения первой и второй фазовых информаций для получения объединенной фазовой информации и средство коррекции фазы принятых символов данных, основываясь на объединенной фазовой информации.
27. Машиночитаемая память, имеющая коды, записанные на ней, которая осуществляет способ выполнения фазовой коррекции для беспроводной связи, причем коды выполняются процессором и содержат: коды для получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих в текущем периоде символа; коды для получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих в текущем периоде символа; и коды для коррекции фазы принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
28. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью получения принятых пилотных символов и принятых символов данных от передачи со множеством входов и множеством выходов (MIMO) в текущем периоде символа, получения первой фазовой информации, основываясь на принятых пилотных символах в текущем периоде символа, получения второй фазовой информации, основываясь на принятых символах данных в текущем периоде символа, и коррекции фазы принятых символов данных в последующем периоде символа, основываясь на первой и второй фазовых информациях; и память, соединенную с, по меньшей мере, одним процессором.
29. Устройство по п.28, в котором, по меньшей мере, один процессор выполнен с возможностью выполнения MIMO обнаружения на принятых пилотных символах для получения оцененных пилотных символов для множественных потоков и суммирования скалярного произведения оцененных пилотных символов и известных пилотных символов для получения первой фазовой информации.
30. Устройство по п.28, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых символов данных, выполнения MIMO обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных для множественных потоков, получения твердых решений для оцененных символов данных и суммирования скалярных произведений оцененных символов данных и твердых решений для получения второй фазовой информации.
31. Устройство по п.28, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых пилотных символов, получения первой фазовой информации, основываясь на пилотных символах со скорректированной фазой, и коррекции фазы принятых символов данных, основываясь на первой фазовой информации.
32. Устройство по п.28, в котором, по меньшей мере, один процессор выполнен с возможностью коррекции фазы принятых символов данных, основываясь на первой фазовой информации, выполнения MIMO обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных, получения второй фазовой информации, основываясь на оцененных символах данных, и коррекции фазы оцененных символов данных, основываясь на второй фазовой информации.
33. Устройство по п.28, в котором, по меньшей мере, один процессор выполнен с возможностью объединения первой и второй фазовых информаций для получения объединенной фазовой информации и коррекции фазы принятых символов данных, основываясь на объединенной фазовой информации.
34. Способ выполнения фазовой коррекции для беспроводной связи, содержащий этапы на которых: получают в устройстве беспроводной связи принятые пилотные символы и принятые символы данных из передачи со множеством входов и множеством выходов (MIMO) в текущем периоде символа; получают в устройстве беспроводной связи первую фазовую информацию, основываясь на принятых пилотных символах в текущем периоде символа; получают в устройстве беспроводной связи вторую фазовую информацию, основываясь на принятых символах данных в текущем периоде символа; и
корректируют посредством процессора устройства беспроводной связи фазу принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
35. Способ по п.34, дополнительно содержащий этапы, на которых:
выполняют MIMO обнаружение на принятых пилотных символах для получения оцененных пилотных символов для множественных потоков, и при этом этап получения первой фазовой информации содержит этап, на котором: суммируют скалярные произведения оцененных пилотных символов и известных пилотных символов для получения первой фазовой информации.
36. Способ по п.34, дополнительно содержащий этапы, на которых:
выполняют MIMO обнаружение на символах данных со скорректированной фазой для получения оцененных символов данных для множественных потоков, и при этом этап получения второй фазовой информации содержит этапы, на которых: получают твердые решения для оцененных символов данных и суммируют скалярные произведения оцененных символов данных и твердые решения для получения второй фазовой информации.
37. Способ по п.34, в котором этапы, на которых получают первую фазовую информацию, получают вторую фазовую информацию и корректируют фазу принятых символов данных, содержат этапы, на которых: корректируют фазу принятых символов данных, основываясь на первой фазовой информации, выполняют MIMO обнаружение на символах данных со скорректированной фазой для получения оцененных символов данных, получают вторую фазовую информацию, основываясь на оцененных символах данных; и корректируют фазу оцененных символов данных, основываясь на второй фазовой информации.
38. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: средство получения принятых пилотных символов и принятых символов данных из передачи со множеством входов и множеством выходов (MIMO) в текущем периоде символа; средство получения первой фазовой информации, основываясь на принятых пилотных символах в текущем периоде символа;
средство получения второй фазовой информации, основываясь на принятых символах данных в текущем периоде символа; и средство коррекции фазы принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
39. Устройство по п.38, дополнительно содержащее: средство выполнения MIMO обнаружения на принятых пилотных символах для получения оцененных пилотных символов для множественных потоков, и
при этом средство получения первой фазовой информации содержит:
средство суммирования скалярных произведений оцененных пилотных символов и известных пилотных символов для получения первой фазовой информации.
40. Устройство по п.38, дополнительно содержащее: средство выполнения MIMO обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных для множественных потоков, и при этом средство получения второй фазовой информации содержит:
средство получения твердых решений для оцененных символов данных и средство суммирования скалярных произведений оцененных символов данных и твердых решений для получения второй фазовой информации.
41. Устройство по п.38, в котором средство получения первой фазовой информации, средство получения второй фазовой информации и средство коррекции фазы принятых символов данных содержат: средство коррекции фазы принятых символов данных, основываясь на первой фазовой информации, средство выполнения MIMO обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных, средство получения второй фазовой информации, основываясь на оцененных символах данных; и средство коррекции фазы оцененных символов данных, основываясь на второй фазовой информации.
42. Машиночитаемая память, имеющая команды, записанные на ней, которая осуществляет способ выполнения фазовой коррекции для беспроводной связи, причем команды выполняются процессором и содержат: первый набор команд для получения принятых пилотных символов и принятых символов данных от MIMO передачи в текущем периоде символа; второй набор команд для получения первой фазовой информации, основываясь на принятых пилотных символах в текущем периоде символа; третий набор команд для получения второй фазовой информации, основываясь на принятых символах данных в текущем периоде символа; и четвертый набор команд для коррекции фазы принятых символов данных в текущем периоде символа, основываясь на первой фазовой информации и фазе принятых символов данных в последующем периоде символа, основываясь на второй фазовой информации.
43. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью получения первой фазовой оценки, основываясь на принятых пилотных символах в первом периоде символа, коррекции фазы принятых символов данных в первом периоде символа, основываясь на первой фазовой оценке для получения символов данных со скорректированной фазой, выполнения обнаружения на символах данных со скорректированной фазой для получения оцененных символов данных, получения второй фазовой оценки, основываясь на оцененных символах данных, и коррекции фазы оцененных символов данных, основываясь на второй фазовой оценке во втором периоде символа; и память, соединенную с, по меньшей мере, одним процессором.
44. Устройство по п.43, в котором, по меньшей мере, один процессор выполнен с возможностью получения оцененных пилотных символов, основываясь на принятых пилотных символах, и суммирования скалярных произведений оцененных пилотных символов и известных пилотных символов для получения первой фазовой оценки.
45. Устройство по п.43, в котором, по меньшей мере, один процессор выполнен с возможностью получения твердых решений для оцененных символов данных и суммирования скалярных произведений оцененных символов данных и твердых решений для получения второй фазовой оценки.
46. Машиночитаемая память по п.27, в которой коды для получения первой фазовой информации, коды для получения второй фазовой информации и коды для коррекции фазы принятых символов данных в текущем периоде символа содержат: коды для коррекции фазы принятых символов; коды для получения первой фазовой информации, основываясь на пилотных символах со скорректированной фазой; коды для коррекции фазы принятых символов данных, основываясь на первой фазовой информации.
47. Машиночитаемая память по п.27, в которой коды для получения первой фазовой информации, коды для получения второй фазовой информации и коды для коррекции фазы принятых символов данных в текущем периоде символа содержат:
коды для коррекции фазы принятых символов данных, основываясь на первой фазовой информации; коды для выполнения обнаружения символов данных со скорректированной фазой для получения оцененных символов данных; коды для получения второй фазовой информации, основываясь на оцененных символах данных; коды для коррекции фазы оцененных символов данных, основываясь на второй фазовой информации.
48. Машиночитаемая память по п.27, в которой коды для коррекции фазы принятых символов данных содержат: коды для объединения первой и второй фазовых информаций для получения объединенной фазовой информации и коды для коррекции фазы принятых символов данных, основываясь на объединенной фазовой информации.
49. Способ выполнения фазовой коррекции для беспроводной связи, содержащий этапы, на которых: получают в устройстве беспроводной связи первую фазовую информацию, основываясь на принятых пилотных символах от первого набора поднесущих; получают в устройстве беспроводной связи вторую фазовую информацию, основываясь на принятых символах данных от второго набора поднесущих; корректируют посредством процессора устройства беспроводной связи фазу принятых символов данных, основываясь на первой и второй фазовых информациях; и определяют полную ошибку отсчета времени, основываясь на первой фазовой информации, или на второй фазовой информации, или на той и другой, для ускорения отсчета времени, если полная ошибка отсчета времени превысит первую величину, и для замедления отсчета времени, если полная ошибка отсчета времени упадет ниже второй величины.
50. Устройство для выполнения фазовой коррекции для беспроводной связи, содержащее: средство для получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих; средство для получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих; средство для коррекции фазы принятых символов данных, основываясь на первой и второй фазовых информациях; и средство для определения полной ошибки отсчета времени, основываясь на первой фазовой информации, или на второй фазовой информации, или на той и другой, для ускорения отсчета времени, если полная ошибка отсчета времени превысит первую величину, и для замедления отсчета времени, если полная ошибка отсчета времени упадет ниже второй величины.
51. Машиночитаемая память, имеющая коды, записанные на ней, которая осуществляет способ выполнения фазовой коррекции для беспроводной связи, причем коды выполняются процессором и содержат: коды для получения первой фазовой информации, основываясь на принятых пилотных символах от первого набора поднесущих; коды для получения второй фазовой информации, основываясь на принятых символах данных от второго набора поднесущих; коды для коррекции фазы принятых символов данных, основываясь на первой и второй фазовых информациях; и коды для определения полной ошибки отсчета времени, основываясь на первой фазовой информации, или на второй фазовой информации, или на той и другой, для ускорения отсчета времени, если полная ошибка отсчета времени превысит первую величину, и для замедления отсчета времени, если полная ошибка отсчета времени упадет ниже второй величины.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP 1580949 A1, 28.09.2005 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 1999 |
|
RU2233033C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ получения 1-окса-4-селенана | 1982 |
|
SU1162803A1 |

