Изобретение относится к области авиационного приборостроения.
Курс, крен, тангаж, скорость и координаты местоположения относятся к основным навигационным параметрам, измеряемым на борту летательных аппаратов (ЛА). На борту современных ЛА для измерения курса, крена, тангажа, скорости и координат местоположения широкое применение нашли инерциальные навигационные системы (ИНС).
Теоретические основы функционирования ИНС и описание некоторых из них приведены во многих работах отечественных и зарубежных авторов. В частности, в книгах, которые приведены ниже в порядке года издания:
- Б.С.Петров "Вопросы теории инерциальных навигационных систем", М.: Наука, 2003;
- О.А. Бабич "Обработка информации в навигационных комплексах", М.: Машиностроение, 1991;
- "Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации". М.: Машиностроение, 1989;
- И.И.Помыкаев, В.П.Селезнев, Л.А.Дмитроченко "Навигационные приборы и системы", М.: Машиностроение, 1983;
- Ф.В.Репников, Г.П.Сачков, А.И.Черноморский "Гироскопические системы", М.: Машиностроение, 1983;
- С.С.Ривкин, Р.И.Ивановский, А.В.Костров "Статистическая оптимизация навигационных систем". Л.: Судостроение, 1976;
- А.Липтон "Выставка инерциальных систем на подвижном основании", М.: Наука, 1971;
- "Инерциальные системы управления" / под редакцией Д.Питмана. М.: Воениздат, 1967 и др.
ИНС могут быть платформенного или бесплатформенного типа и имеют в своем составе несколько гироскопов и акселерометров. С их помощью в ИНС измеряют одновременно составляющие векторов угловой скорости и ускорения, интегрируя которые, определяют курс, крен, тангаж, скорость и координаты местоположения.
На борту современных ЛА все большее применение находят ИНС бесплатформенного типа - БИНС.
Современные БИНС, как правило, имеют два основных режима работы - ПОДГОТОВКА и РАБОТА.
В режиме ПОДГОТОВКА осуществляется выставка БИНС в горизонте и азимуте - определяется ориентация измерительных осей БИНС относительно местного горизонта и направления север-юг. От качества и точности выставки во многом зависит точность работы БИНС в последующем полете.
Теоретические основы функционирования ИНС при выставке на неподвижном основании (в наземных условиях) рассмотрены в вышеупомянутых работах Б.С.Петрова; А.В.Репникова; А.Липтона, Д.Питмана.
В БИНС при выставке определяется начальное значение матрицы ориентации приборной системы координат относительно базовой системы координат.
На неподвижном основании сущность автономной выставки БИНС состоит в измерении составляющих вектора ускорения силы тяжести и составляющих вектора угловой скорости вращения Земли по измерительным осям системы и нахождении углов ориентации измерительных осей БИНС относительно плоскости местного горизонта и вектора скорости вращения Земли.
Конструкция и технология производства современных БИНС, в частности используемых в их составе гироскопов, акселерометров и вычислительных устройств, обеспечивают достаточный уровень точности автономной выставки при ее проведении на неподвижном основании, т.е. при подготовке ЛА к вылету с наземного аэродрома.
Значительно более сложной, по сравнению с выставкой на аэродроме, является выставка БИНС при базировании ЛА на корабле. Процесс выставки БИНС при подготовке ЛА к взлету с палубы корабля усложнен движением корабля, а также состоянием моря, оказывающим существенное воздействие на движение корабля.
Теоретические основы функционирования ИНС при выставке на подвижном основании рассмотрены в вышеупомянутых работах А.Липтона, Б.С.Петрова, А.В.Репникова, С.С.Ривкина.
Основными методами выставки БИНС современных ЛА, при выставке на корабле, являются различные модификации рассмотренного в работе А.Липтона метода согласования векторов угловой ориентации и скорости самого корабля и стоящего на его палубе ЛА, которые измеряются соответственно инерциальными системами корабля и ЛА.
В БИНС современных ЛА, с учетом особенностей их конструкции, такое согласование осуществляется непосредственно в самой БИНС с использованием возможностей встроенных в системы вычислительных устройств.
Процедура выставки в БИНС, как правило, разделена на два этапа:
- грубая выставка - грубое согласование векторов;
- точная выставка - точное согласование векторов.
На этапе грубой выставки определяется приблизительное значение матрицы ориентации БИНС с использованием сигналов от акселерометров и датчиков угловой скорости самой БИНС, а также параметров угловой ориентации корабля. Для уменьшения времени данного этапа в БИНС могут вводиться приблизительные значения параметров угловой ориентации самого ЛА.
Математический аппарат, используемый в БИНС на этапе грубой выставки, описан практически во всех вышеупомянутых книгах.
Основой математического аппарата, обеспечивающего аналитическое согласование векторов угловой ориентации и скорости на этапе точной выставки, служит, как правило, метод оптимальной фильтрации Калмана (ОФК), описанный в упомянутых выше книгах С.С.Ривкина (глава 5) и О.А.Бабича (глава 1).
Этап грубой выставки позволяет уменьшить погрешности начальной ориентации до величин, позволяющих линеаризовать математическую модель погрешностей БИНС. Поэтому структура ОФК, на этапе точной выставки, как правило, базируется на представлении вектора "состояния системы" в виде системы линейных дифференциальных уравнений, являющейся линеаризованной математической моделью погрешностей БИНС.
Свойствами выставки на корабле обладает БИНС Sigma-95NAA, разработанная французской фирмой SAGEM (документ SIGMA 95NAA INS/GPS. TECHNICAL SPECIFICATIONS. April 2008).
Для информационного обеспечения выставки на подвижном основании в вышеупомянутую БИНС должны быть переданы данные о параметрах движения корабля:
- углы рысканья, дифферента и крена;
- северная и восточная составляющие вектора скорости по осям географической системы координат;
- географические координаты - широта и долгота.
Для учета различий в движении точек местоположения корабельной ИНС и места подготовки ЛА, в вышеупомянутую БИНС также должны быть переданы линейные координаты места стоянки ЛА относительно корабельной ИНС (X, Y, Z), угловые скорости изменения углов рысканья, дифферента и крена корабля, а также приблизительное значение курса ЛА относительно географического меридиана (ψГ) с допустимой погрешностью от -5 до +5 гр.
На этапе грубой выставки в БИНС Sigma-95NAA, на основе внешних данных об угловой ориентации корабля, векторе скорости корабля, координатах местоположения корабля, приблизительном значении курса ЛА ψГ и данных от собственных датчиков угловых скоростей и ускорений, определяются приблизительные значения параметров угловой ориентации ЛА. Продолжительность этапа грубой выставки составляет 30÷40 секунд.
На этапе точной выставки в БИНС Sigma-95NAA, на основе данных о векторе скорости корабля, координатах местоположения корабля, и данных от собственных датчиков угловых скоростей и ускорений, с использованием метода ОФК, определяются точные значения параметров угловой ориентации и скорости ЛА. При интегрировании скорости данные о координатах корабля принимаются в качестве начальных. Продолжительность этапа точной выставки, в зависимости от волнения моря, составляет 10-15 минут.
Описание, наиболее близкого к предлагаемому изобретению, устройства (прототип) приведено в патенте РФ на изобретение №2276328 с приоритетом от 21 июня 2005 г. "Прицельно-навигационный комплекс многофункционального самолета авианосного и наземного базирования".
С учетом только существенных, для предлагаемого изобретения, признаков устройство-прототип содержит взаимосоединенные входами-выходами по каналу информационного обмена (КИО) комплект многофункциональных индикаторов (МФИ), комплект навигационно-пилотажных средств (КНПС), комплект оптико-прицельных средств (КОПС), переносной носитель исходных данных (ПНИД), вычислительную систему (ВС), включающую взаимосоединенные входами-выходами по магистрали вычислительного информационного обмена (МВИО) вычислительно-логические модули объединенной базы данных (ОБД), формирования навигационно-пилотажных параметров (ФНПП), выставки по курсу на подвижном и колеблющемся основании (ВКПКО), формирования отображаемой информации (ФОИ), ввода-вывода и управления информационным обменом (ВВУИО), вход-выход которого является входом-выходом ВС.
Также, с учетом цели предлагаемого изобретения, изложенной ниже, делаем следующие, не противоречащие содержанию описания вышеуказанного патента на изобретение, допущения:
1) полагаем, что устройство-прототип имеет переменную структуру, а именно, при подготовке к полету на палубе корабля, к КИО подключен навигационный комплекс корабля (НКК), состоящий из комплекта инерциальных навигационных систем корабля (ИНС-К) и устройства вычисления, преобразования и передачи информации (УВППИ);
2) полагаем, что КНПС включает комплект БИНС, комплект спутниковых навигационных систем (СНС) и комплект систем воздушных сигналов (СВС) (необходимость резервирования критически важной пилотажно-навигационной информации путем установки на борт ЛА нескольких однотипных датчиков особенно актуальна для ЛА корабельного базирования).
На чертеже (см. фиг.1) представлена блок-схема устройства-прототипа, содержащего:
1 - комплект многофункциональных индикаторов МФИ;
5 - комплект оптико-прицельных средств КОПС;
6 - комплект навигационно-пилотажных средств КНПС, содержащий:
6.1 - БИНС,
6.2 - СНС,
6.3 - СВС;
7 - переносной носитель исходных данных ПНИД;
9 - канал информационного обмена КИО;
10 - вычислительную систему ВС, включающую следующие вычислительно логические модули (ВЛМ):
11 - ВЛМ объединенной базы данных ОВД,
12 - ВЛМ формирования навигационно-пилотажных параметров ФНПП,
13 - ВЛМ ввода-вывода и управления информационным обменом ВВУИО,
15 - ВЛМ формирования отображаемой информации ФОИ,
18 - ВЛМ выставки по курсу на подвижном и колеблющемся основании ВККО;
20 - магистраль вычислительного информационного обмена МВИО;
21 - навигационный комплекс корабля НКК, содержащий:
22 - комплект систем инерциальной навигации и стабилизации СИНС,
23 - устройство вычисления, преобразования и передачи информации (УВППИ).
Устройство-прототип обеспечивает формирование навигационной, пилотажной и прицельной информации, ее представление на многофункциональных индикаторах, управление ЛА.
К недостаткам устройства-прототипа относятся:
- функционально ограниченные возможности технологических процедур определения начальной ориентации БИНС по курсу на подвижном и колеблющемся основании по данным от визуальных средств корабля и ЛА;
- фактическая невозможность проведения полноценной начальной выставки БИНС на подвижном и колеблющемся основании при отсутствии (отказе) информационного взаимодействия с НКК;
- повышенные погрешности БИНС при ее переводе в рабочий режим до завершения полноценной начальной выставки БИНС на подвижном и колеблющемся основании.
Использование для определения начальной ориентации ЛА по курсу данных от системы наведения авианосца и КОПС о береговых ориентирах естественно ограничено преимущественным нахождением авианосца вне видимости береговой линии. Использование для определения начальной ориентации ЛА по курсу данных от системы наведения авианосца и КОПС о кораблях сопровождения требует соответствующей организации строя кораблей, что, в сочетании с необходимостью одновременной выставки БИНС на нескольких ЛА, чаще всего, будет невозможно по тактическим соображениям.
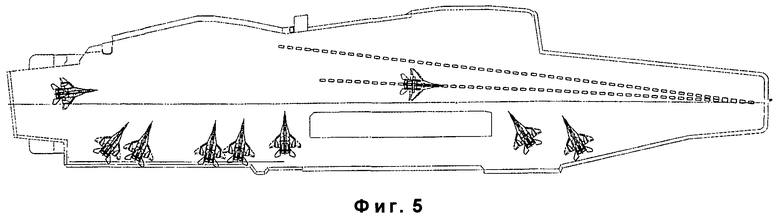
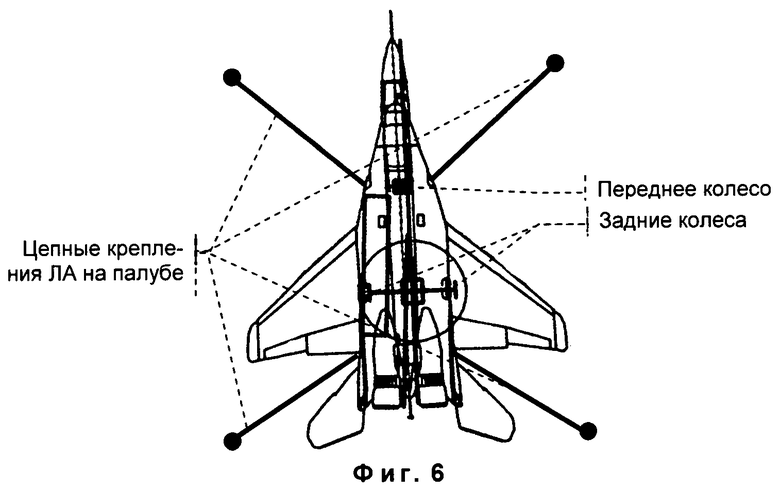
Реализуемый в предлагаемом устройстве метод определения начальной ориентации ЛА по курсу базируется на геометрических свойствах палубы корабля и методах размещения и фиксации ЛА относительно корабля. Известно, что хранение ЛА и основная часть работ по подготовке ЛА к взлету производится на так называемых технических позициях (ТП), находящихся на верхней палубе корабля. Для обеспечения соответствующей устойчивости и сохранности ЛА на ТП обязательно жестко фиксируются относительно палубы корабля с помощью специальных цепных устройств. Правильная работа фиксирующих устройств возможна только при соответствующей ориентации ЛА на ТП. С учетом ограниченного пространства на палубе и необходимости размещения на палубе достаточно большого количества ЛА размещение ЛА на каждой ТП производится под определенным углом относительно палубы корабля. Для облегчения работ обслуживающего персонала по правильной установке ЛА на каждой ТП нанесена разметка требуемого размещения колес ЛА. Как показывает практика, при правильной работе обслуживающего персонала точность установки ЛА на ТП по курсу составляет ±5° относительно паспортной ориентации ТП.
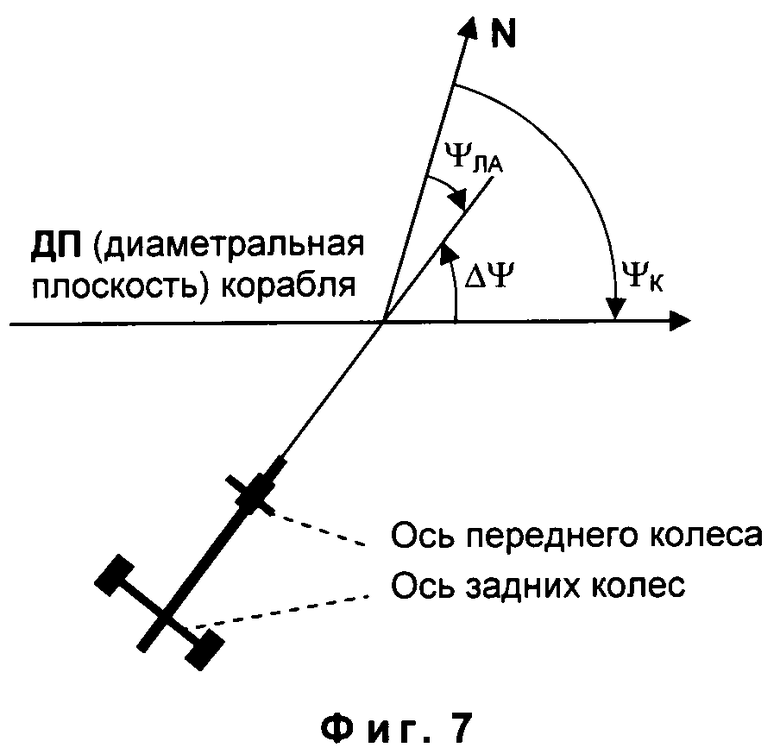
На фиг.5, 6, 7 приведены рисунки, иллюстрирующие размещение ЛА на верхней палубе корабля в целом (фиг.5), фиксацию ЛА относительно палубы корабля с помощью специальных цепных устройств (фиг.6) и используемый в предлагаемом устройстве метод определения начальной ориентации ЛА по курсу (фиг.7).
В соответствии с рисунком на фиг.7, начальный курс ЛА ψЛА при проведении подготовки на одной из ТП определяется следующим образом:
ψЛА=ψК-ΔψТП,
где ψК - текущий курс корабля, ΔψТП - известный угол ориентации соответствующей ТП относительно диаметральной плоскости (ДП) корабля.
Как уже указывалось выше, при подготовке ЛА к взлету с палубы корабля, выставка БИНС усложнена движением корабля, на которое существенное воздействие оказывает состояние моря. БИНС, выставленная без учета движения корабля, будет иметь погрешности, не позволяющие выполнять ЛА его основные функциональные задачи.
Такая ситуация может возникнуть при отказе НКК или если подготовка к взлету, в силу каких-либо обстоятельств, осуществляется на корабле, непредназначенном для базирования данного типа ЛА. Возможна также ситуация проведения подготовки на аэродроме в условиях очень сильных (нерасчетных) ветровых воздействий, влияние которых на процесс выставки в определенной степени эквивалентно воздействию колебаний корабля.
В случае проведения выставки без взаимодействия с НКК в качестве источника данных о координатах текущего местоположения и скорости движения может быть использована СНС самого ЛА, необходимые дополнительные параметры могут быть рассчитаны по данным от бортовых навигационно-пилотажных систем, в том числе и от самой БИНС, а начальный курс ЛА ψЛА может быть введен в систему с одного из МФИ.
В случае проведения выставки на аэродроме в условиях нерасчетных ветровых воздействий БИНС может быть переведена в режим выставки "по корабельному", при этом в качестве координат текущего местоположения могут быть использованы координаты аэродрома из базы данных, скорость движения и другие необходимые параметры могут быть приняты равными нулю, а начальный курс ЛА ψЛА может быть введен в систему с одного из МФИ.
Современные БИНС, как правило, могут быть переведены в рабочий режим еще до завершения полноценной начальной выставки. Такое свойство БИНС очень полезно при эксплуатации ЛА из тактических и оперативных соображений. Однако результатом незавершения полноценной начальной выставки БИНС будут повышенные погрешности определения навигационно-пилотажных параметров, что может сказаться на функциональных возможностях ЛА.
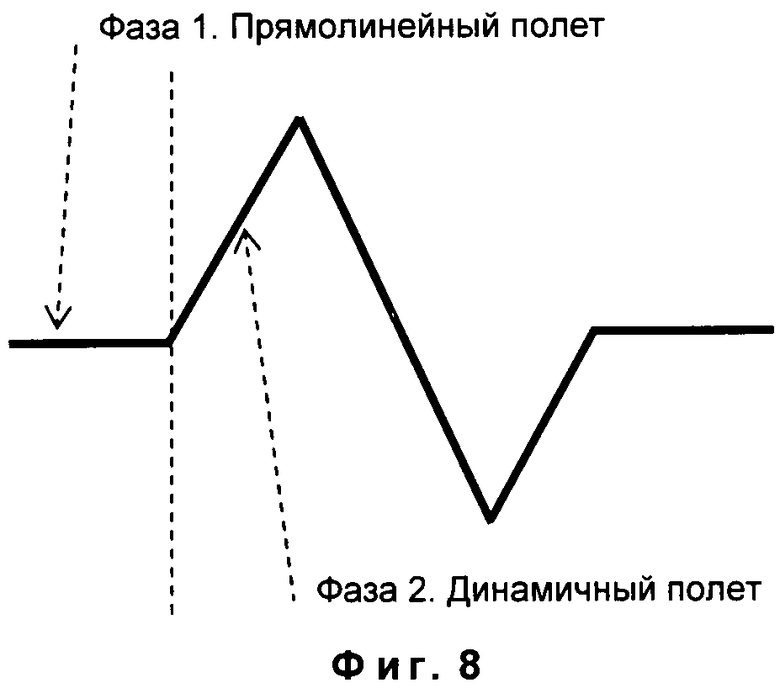
Современные БИНС, в том числе упомянутая выше система Sigma-95NAA, могут быть переведены в режим "довыставки" в воздухе по данным от других, более точных навигационных систем, например, по данным от СНС. В определенном смысле режим "довыставки" эквивалентен выставке на корабле. Поэтому на вход системы должны поступать соответствующие данные о движении самолета. Для большей эффективности процесса "довыставки" и сокращения ее продолжительности рекомендуется совершить в процессе "довыставки" маневр типа "змейка". На фиг.8 приведен рисунок, иллюстрирующий такой тип маневра. После завершения "довыставки" точностные характеристики БИНС полностью соответствуют паспортным данным системы после проведения полноценной подготовки.
Техническим результатом предлагаемого изобретения является упрощение технологических процедур при определении начальной ориентации БИНС по курсу, расширение функциональных возможностей по контролю за ходом процесса начальной выставки БИНС на корабле, повышение точности выставки БИНС при подготовке на корабле с неподключенным (отказавшим) НКК или при подготовке на наземном аэродроме в условиях нерасчетных ветровых воздействий, повышение точности определения навигационно-пилотажных параметров ЛА после взлета с корабля с повышенными оценками погрешностей БИНС и, как следствие, повышение эффективности использования ЛА, снабженных предлагаемым комплексом.
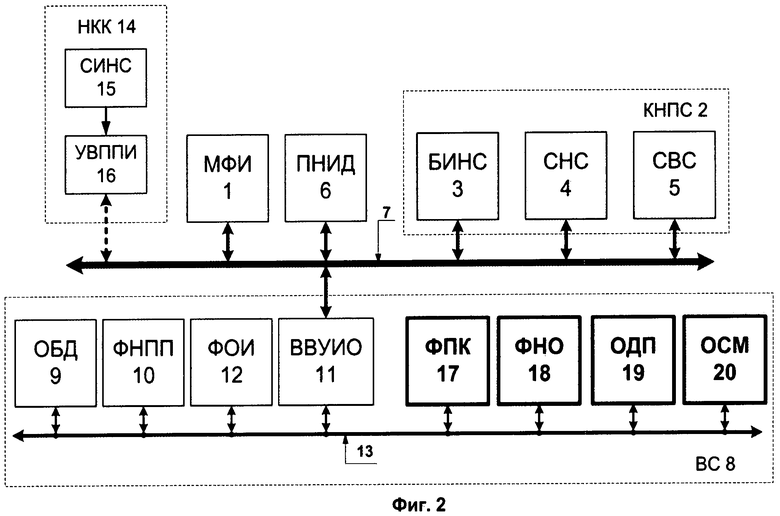
Технический результат в части упрощения технологических процедур при определении начальной ориентации БИНС по курсу и расширения функциональных возможностей по контролю за ходом процесса начальной выставки БИНС на корабле достигается введением в состав вычислительной системы устройства дополнительных вычислительно-логических модулей формирования параметров начальной ориентации (ФНО), оценки состояния моря (ОСМ) и оценки длительности выставки и погрешностей (ОДП) БИНС.
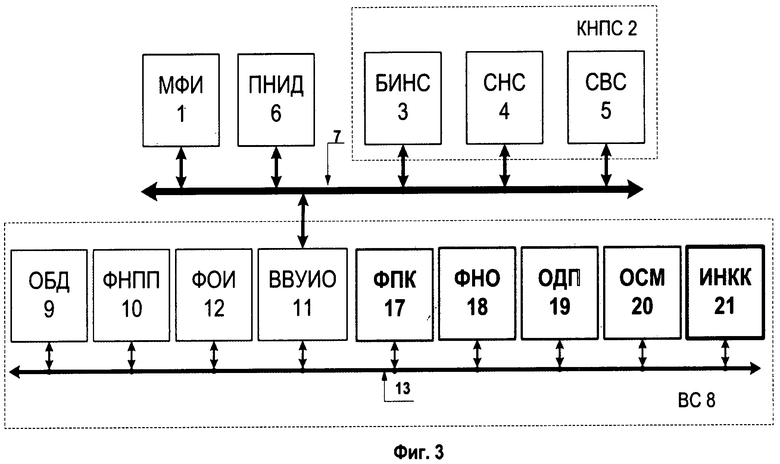
Технический результат в части повышения точности выставки БИНС на корабле при отсутствии (отказе) информационного взаимодействия с НКК или на наземном аэродроме в условиях нерасчетных ветровых воздействий достигается введением в состав вычислительной системы устройства дополнительного вычислительно-логического модуля имитации данных НКК (ИНКК).
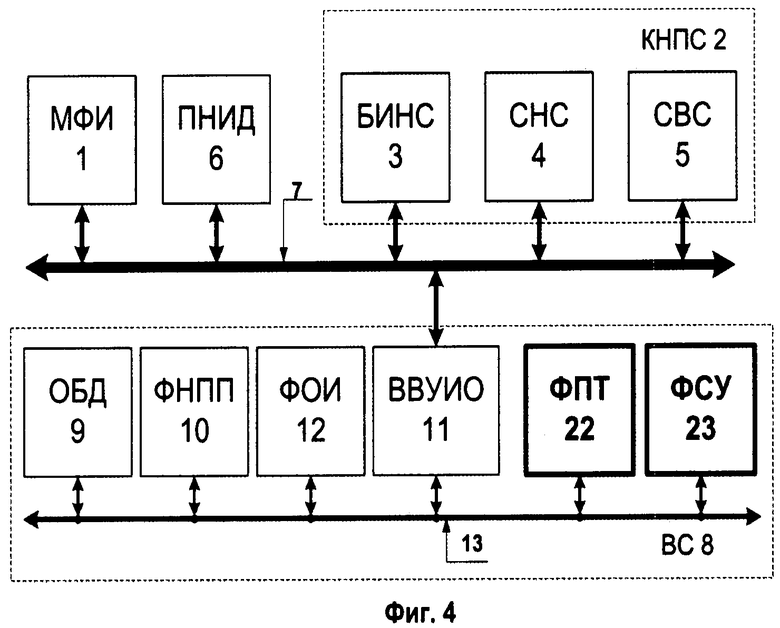
Технический результат в части повышения точности определения навигационно-пилотажных параметров ЛА после взлета с повышенными оценками погрешностей БИНС достигается введением в состав вычислительной системы устройства дополнительных вычислительно-логических модулей формирования параметров рекомендуемой траектории (ФРТ) и формирования сигналов управления траекторией (ФСУ).
На фиг.2, 3 и 4 представлены блок-схемы предлагаемой системы, обеспечивающей достижение поставленных целей и содержащей:
1) комплект многофункциональных индикаторов МФИ;
2) комплект навигационно-пилотажных средств КНПС, содержащий:
3) БИНС,
4) СНС,
5) СВС;
6) переносной носитель исходных данных ПНИД;
7) канал информационного обмена КИО;
8) вычислительную систему ВС, включающую следующие вычислительно логические модули (ВЛМ):
9) ВЛМ объединенной базы данных ОВД,
10) ВЛМ формирования навигационно-пилотажных параметров ФНПП,
11) ВЛМ ввода-вывода и управления информационным обменом ВВУИО,
12) ВЛМ формирования отображаемой информации ФОИ,
17) ВЛМ формирования параметров движения корабля ФПК,
18) ВЛМ формирования параметров начальной ориентации ФНО,
19) ВЛМ оценки длительности выставки и погрешностей БИНС ОДП,
20) ВЛМ оценки состояния моря ОСМ,
21) ВЛМ имитации данных навигационного комплекса корабля ИНКК,
22) ВЛМ формирования параметров рекомендуемой траектории ФПТ,
23) ВЛМ формирования сигналов управления траекторией ФСУ;
13) магистраль вычислительного информационного обмена МВИО;
14) навигационный комплекс корабля НКК, содержащий:
15) комплект систем инерциальной навигации и стабилизации СИНС,
16) устройство вычисления, преобразования и передачи информации (УВППИ).
Информационная взаимосвязь всего оборудования комплекса осуществляется по КИО, включающему электрические, механические, электромеханические связи.
МФИ содержит "n" многофункциональных индикаторов с цветными жидкокристаллическими экранами (ЖКЭ).
КНПС включает "n" БИНС, "n" СНС и "n" СВС, измеряющих параметры движения ЛА при подготовке и в полете, которые с входа-выхода КНПС через КИО поступают на вход-выход ВС.
Рассматриваемая в данной заявке на изобретение БИНС обладает свойствами выставки на корабле и довыставки в воздухе по данным от внешних, по отношению к ней, навигационных систем.
БИНС измеряет при подготовке и в полете следующие параметры движения ЛА: курс ψБИНС, крен ψБИНС, тангаж υБИНС, составляющие вектора угловой скорости ЛА по осям связанной системы координат ωБИНСх, ωБИНСу, ωБИНСz, составляющие вектора ускорения ЛА по осям связанной системы координат АБИНСх, АБИНСу, АБИНСz, составляющие вектора скорости ЛА по осям географической системы координат VБИНСn, VБИНСе, VБИНСh, географические координаты местоположения φБИНС, φБИНС, высоту HБИНС, время работы после включения питания ТБИНСр, состояние процесса выставки в виде сигналов завершенности этапов выставки БИНС и оценки перспективной погрешности БИНС ΔS за час полета, которые через КИО поступают на вход-выход ВС и через ВВУИО и МВИО в ФНПП, ФОИ, ФНО, ОДП, ОСМ, ИНКК, ФПС, ФПТ, ФСУ.
СНС измеряет при подготовке и в полете следующие параметры движения ЛА: составляющие вектора скорости ЛА по осям географической системы координат VCHCn, VCHCе, VCHCh, географические координаты местоположения φСНС, λСНС и высоту НСНС, которые через КИО поступают на вход-выход ВС и через ВВУИО и МВИО в ФНПП, ФОИ, ФНО, ОДП, ОСМ, ИНКК.
СВС измеряет в полете следующие параметры движения ЛА относительно воздуха: скорость ЛА относительно воздуха VCBC, барометрическую высоту НСВС, которые через КИО поступают на вход-выход ВС и через ВВУИО и МВИО в ФНПП, ФОИ, ФПТ, ФСУ.
ПНИД является носителем полетных заданий с долговременной репро-граммируемой памятью (типа стандартных флеш-карт), подготавливаемых на наземных пунктах планирования полетных заданий. Введенные в ПНИД исходные данные для бортового оборудования, параметры навигационных точек на маршруте, параметры возможных аэродромов базирования, параметры возможных кораблей базирования, параметры мест размещения СИНС на корабле, параметры ТП подготовки ЛА на кораблях и другие данные через КИО поступают на вход ВС, а затем через ВВУИО и МВИО в ОБД.
НКК включает "n" СИНС, определяющих параметры движения корабля и УВППИ. Для обеспечения большей надежности и живучести все СИНС и УВППИ размещены в различных, далеко расположенных друг от друга, помещениях (постах) корабля.
Каждая из СИНС измеряет следующие параметры движения корабля: курс ψИНС-К, крен γИНС-К, дифферент υИНС-К, угловые скорости изменения курса ωψИНС-К, крена ωγИНС-К и дифферента ωγИНС-К, составляющие вектора скорости корабля по осям географической системы координат VИНС-Kn и VИНС-Kе, географические координаты местоположения φИНС-К и λИНС-К. УВППИ принимает от всех СИНС параметры движения корабля, в соответствии с текущим состоянием СИНС осуществляет коммутацию параметров, преобразует и передает через КИО на вход ВС следующие параметры движения корабля: курс ψK, крен γK, дифферент νK, скорости изменения курса ωψK, крена ωγK и дифферента ωνK, составляющие вектора скорости по осям географической системы координат VKn и VKe, географические координаты местоположения φK и λK, идентификатор корабля IDK, номер текущей СИНС NСИНС и номер ТП подготовки ЛА на палубе корабля NTП. УВППИ также принимает через КИО из ВС параметры, характеризующие состояние процесса выставки БИНС.
ВС является вычислительной системой, при этом все ВМЛ, входящие в состав ВС, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
ВВУИО через один вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход ВС по КИО. Другой вход-выход ВВУИО подключен к МВИО, осуществляющей информационный обмен между всеми ВМЛ ВС.
ОБД выполнен на стандартном долговременном запоминающем устройстве, хранящем данные, поступившие с ПНИД.
В ФНПП осуществляется комплексная обработка информации от КНПС, ОБД и формируются текущие навигационно-пилотажные параметры ЛА, поступающие по МВИО в ФОИ.
В ФОИ по данным, полученным по МВИО от ОБД, ФНПП, ФНО, ОДП, ОСМ, ФПТ, ФСУ и от взаимодействующего оборудования через КИО и ВВУИО, формируются обобщенные мнемокадры функциональной, цифробуквенной информации, совмещенной с представлением многофункционального пульта управления. Сформированные мнемокадры изображений с входа-выхода ФОИ через МВИО, ВВУИО, КИО поступают в МФИ для отображения на экранах с целью принятия решения экипажем для работы с оборудованием комплекса через обрамляющие экраны многофункциональных индикаторов органы управления (сенсорные кнопки, кнопки-клавиши).
В ФПК, при подготовке к вылету ЛА с корабля, от НКК через КИО, ВВУИО, МВИО (или от ИНКК через МВИО) поступают следующие параметры движения корабля - курс ψК, крен γК, дифферент υК, скорости изменения курса со ωψк, крена ωγк и дифферента ωνк, составляющие вектора скорости по осям географической системы координат VKn и VKe, географические координаты местоположения φк и λK. Все эти параметры из ФПК передаются через МВИО, ВВУИО и КИО в БИНС. Текущие значения крена γк, дифферента υК корабля также передаются из ФПК через МВИО в ОСМ.
В ФНО, при подготовке к вылету ЛА с корабля, от НКК через КИО, ВВУИО, МВИО (или от ИНКК через МВИО) поступают географический курс корабля ψK, идентификатор корабля IDк, номер текущей СИНС NСИНС и номер ТП подготовки ЛА на палубе корабля NТП. ФНО, в свою очередь, передает в ОБД параметры IDK, NСИНС, NТП и в ответ получает из ОБД параметры, характеризующие геометрические характеристики соответствующей ТП на палубе корабля - угол ориентации ТП ΔψТП относительно диаметральной плоскости (ДП) корабля и координаты ТП относительно соответствующей СИНС корабля ХТП, YТП, ZТП. Координаты ТП относительно СИНС ХТП, YТП, ZТП и начальный курс ЛА, определяемый в ФНО в соответствии с зависимостью ψЛА=ψК-ΔψТП, передаются через МВИО, ВВУИО и КИО в БИНС.
В ОСМ по данным о крене γК и дифференте υК корабля, поступающим из ФПК, осуществляется оценка состояния моря и формирование идентификатора состояния моря IDCM, например, в соответствии со следующей логикой:
где γС, υС, γВ, υВ, γБ, υБ константы, характерные для определенного типа корабля и характеризующие его качку по крену и дифференту при волнении моря различной интенсивности.
Идентификатор состояния моря IDCM передается через МВИО в ОДП. В ОДП из БИНС через КИО, ВВУИО и МВИО поступает время работы БИНС после включения питания ТБИНСр, оценка перспективной погрешности БИНС ΔS за час полета. Из ФПК в ОДП через МВИО поступает географическая широта местоположения корабля φК.
Для каждого состояния моря в ОДП определяется предельно допустимая длительность выставки БИНС ТВ, например, в соответствии с формулой:
ТВ=ТID×Кφ,
где ТID={Т0, T1, Т2, Т3} - нормативная длительность выставки БИНС на широте местоположения корабля φК≤45° для соответствующего состояния моря, Кφ - коэффициент учета широты местоположения корабля, равный единице при φК≤45° и равный cosφК/cos45° при φК>45°.
Время, оставшееся до конца выставки ТКВ=ТВ-ТБИНСр, и оценка перспективной погрешности ΔS каждой из БИНС поступают из ОДП по МВИО в ФОИ для интеграции их в соответствующие кадры индикации на МФИ. Индикация данных параметров информирует экипаж о текущем состоянии процесса выставки и позволяет экипажу, при необходимости, принимать осмысленное решение о прекращении подготовки и взлете с корабля.
Таким образом, на примере технической реализации показано достижение следующего технического результата - дополнительно введенные в состав системы вычислительно-логические модули ФПК, ФИО, ОДП и ОСМ обеспечивают упрощение технологических процедур определения начальной ориентации БИНС по курсу и расширение функциональных возможностей по контролю за ходом процесса начальной выставки БИНС на корабле.
В ИНКК из СНС через КИО, ВВУИО и МВИ поступают составляющие вектора скорости ЛА по осям географической системы координат VCHCn, VCHСе, географические координаты местоположения φСНС, λСНС:
VKn=VCHCn, VKе=VСНСе, φK=φCHC, λК=λСН.
В ИНКК по данным о составляющих вектора скорости из СНС VCHСn, VCHСе рассчитывается направление вектора скорости корабля, отличие которого от курса корабля для рассматриваемой задачи пренебрежимо мало:
ψК=ψVK=arctg(VCHCe/VCHCn).
Из ФОИ через МВИО в ИНКК поступают идентификатор корабля IDk и номер ТП подготовки ЛА на палубе корабля NТП, введенные экипажем с МФИ, работающем в режиме многофункционального пульта управления. ИНКК передает в ОБД параметры IDK и NТП и в ответ получает из ОБД угол ориентации ТП ΔψТП относительно ДП корабля.
Из БИНС через КИО, ВВУИО и МВИО в ИНКК поступают крен γБИНС и тангаж υБИНС, которые, с учетом их малости на стоянке, пересчитываются в крен и дифферент корабля:
γК=(υБИНС-Δυ)×sinΔψТП+γБИНС×cosΔψТП,
υК={γБИНС-Δυ)×cosΔψТП-γБИНC×sinΔψТП,
где Δυ - статический угол тангажа, присущий конкретному типу ЛА при нахождении на стоянке.
Достоверность и необходимая, для рассматриваемой задачи, точность измерения крена и тангажа в современных БИНС обеспечиваются за достаточно короткое время после включения электропитания. До появления достоверных параметров крена и тангажа от БИНС крен и дифферент корабля принимаются равными нулю: γК=υК=0.
Кроме этого, в ИНКК формируется номер текущей СИНС NСИНС, равный значению, для которого в ОБД координаты ТП относительно этой СИНС равны нулю:
ХТП=YТП=ZТП=0.
Таким образом, в ФПК и ФНО, при отсутствии связи с НКК, параметры ψК, γК, υК, ωψК, ωγК, ωνк, VКN, VКЕ, φК, λК, IDК, NСИНС, NТП, которые ранее поступали от НКК, поступают через МВИО от ИНКК.
При вводе экипажем с МФИ, работающем в режиме многофункционального пульта управления, идентификатора корабля IDК, соответствующего проведению выставки на аэродроме в условиях сильных ветровых воздействий, параметры γК, υК, ωψК, ωγК, ωνK, VКN, VКЕ формируются равными нулю
γК=υК=ωψК=ωγК=ωυK=VKn=VKe=0,
параметры φК, λК формируются равными координатам стоянки ЛА на аэродроме в ОБД, параметр NТП формируется равным значению, для которого в ОБД угол ориентации ТП ΔψТП относительно ДП корабля равен нулю.
Таким образом, на примере технической реализации показано достижение следующего технического результата - дополнительно введенный в состав системы вычислительно-логический модуль ИНКК обеспечивает повышение точности выставки БИНС на корабле при отсутствии (отказе) информационного взаимодействия с НКК или проведении выставки на аэродроме в условиях нерасчетных ветровых воздействий.
Возможность прерывания начальной выставки, после достижения определенного уровня точностных характеристик, - очень полезное свойство современных БИНС, особенно, с учетом относительно большей длительности выставки БИНС при базировании на корабле (до 15-20 мин). Это свойство позволяет ЛА, при необходимости, совершать экстренный взлет. Однако, как уже говорилось выше, результатом прерывания начальной выставки БИНС могут быть повышенные погрешности определения навигационно-пилотажных параметров.
Для компенсации этого недостатка в БИНС, рассматриваемой в данной заявке, реализован режим довыставки в воздухе по данным от СНС. Для БИНС такой режим является стандартным, при необходимости включается в БИНС автоматически и, при нахождении ЛА в воздухе, данные от СНС напрямую, минуя ВС, поступают в БИНС по КИО.
Для обеспечения наилучших точностных характеристик при минимальной длительности режима довыставки БИНС, как правило, рекомендуется совершить маневр по курсу типа "змейка".
Сигнал об автоматическом включении в БИНС режима довыставки поступает из БИНС через КИО, ВВУИО и МВИО в ФОИ и ФПТ. В ФПТ также поступают из СВС скорость ЛА относительно воздуха VCBC и барометрическая высота НСВС, а из БИНС курс ψБИНС, крен γБИНС и тангаж υБИНС.
В ФПТ, после взлета, получения сигнала об автоматическом включении в БИНС режима довыставки и стабилизации высотно-скоростных пилотажно-навигационных параметров полета от СВС (VCBC и НСВС) формируется траектория, обеспечивающая наилучшие условия для функционирования режима довыставки и соответственно достижение наилучших точностных характеристик БИНС.
Эта траектория состоит из сочлененных участков прямолинейного, горизонтального полета с различными курсами на постоянной высоте и с постоянной скоростью. Таким образом, в ФПТ формируется и передается в ФСУ и ФОИ заданный курс ψЗ, формируемый, например, в соответствии со следующей логикой:
где ТР - время выполнения довыставки, Т={Т0,T1,Т2,Т3,T4} - времена, определяющие продолжительность полета по каждому участку траектории, ψ0 - курс ЛА в момент включения режима довыставки БИНС.
Сигнал включения режима следования по зададанной траектории и значение текущего заданного курса ψЗ поступают по МВИО в ФСУ для формирования сигналов управления самолетом.
В качестве сигналов управления, например, могут быть сформированы сигналы отклонения текущих значений курса ЛА, высоты ЛА и скорости от, соответственно, значений текущего заданного курса ψЗ и высоты НСВС0 и скорости VCBC0 ЛА в момент включения режима довыставки:
ΔψЗ=ψБИНС-ψЗ,
ΔНЗ=НСВС-HCBC0,
ΔVЗ=VCBC-VСВС0.
Текущий курс ψБИНС из БИНС, текущие значения скорости ЛА относительно воздуха VCBC и барометрической высоты НСВС из СВС поступают через КИО, ВВУИО и МВИО в ФСУ. Значения высоты HСВС0 скорости УCBC0 запоминаются в ФСУ в момент поступления из ФПТ сигнала о включении режима следования по заданной траектории.
Таким образом, на примере технической реализации показано достижение следующего технического результата - дополнительно введенные в состав системы вычислительно-логические модули ФПТ и ФСУ обеспечивают повышение точности определения навигационно-пилотажных параметров ЛА после взлета с повышенными оценками погрешностей БИНС.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА АВИАНОСНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ | 2005 |
|
RU2276328C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| СПОСОБ ПОДГОТОВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ К ПОЛЕТУ | 2013 |
|
RU2529757C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
Изобретение относится к области приборостроения и может найти применение в составе комплексов навигационного оборудования летательных аппаратов (ЛА) корабельного и наземного базирования. Технический результат - расширение функциональных возможностей. Для достижения данного результата система содержит взаимосвязанные по каналу информационного обмена (КИО) комплект многофункциональных индикаторов, комплект бесплатформенных инерциальных навигационных систем (БИНС), комплект спутниковых навигационных систем, комплект систем воздушных сигналов, переносной носитель исходных данных, вычислительную систему (ВС), включающую взаимосоединенные по магистрали вычислительного информационного обмена (МВИО) вычислительно-логические модули (ВЛМ) объединенной базы данных, формирования навигационно-пилотажных параметров, формирования отображаемой информации, ввода-вывода и управления информационным обменом. Введение дополнительных ВЛМ обеспечивает упрощение технологических процедур при определении начальной ориентации БИНС по курсу и расширение функциональных возможностей по контролю за ходом процесса начальной выставки БИНС на корабле. 2 з.п. ф-лы, 8 ил.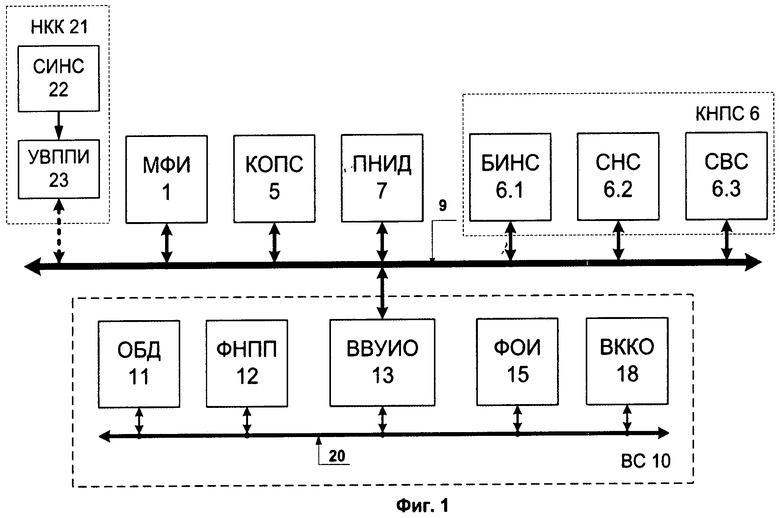
1. Комплексная система подготовки и навигации летательного аппарата, содержащая взаимосоединенные входами-выходами по каналу информационного обмена (КИО) комплект многофункциональных индикаторов, комплект навигационно-пилотажных средств, состоящий, в свою очередь, из комплекта бесплатформенных инерциальных навигационных систем (БИНС), комплекта спутниковых навигационных систем и комплекта систем воздушных сигналов, переносной носитель исходных данных, вычислительную систему (ВС), включающую взаимосоединенные входами-выходами по магистрали вычислительного информационного обмена (МВИО) вычислительно-логические модули объединенной базы данных (ОБД), формирования навигационно-пилотажных параметров (ФНПП), формирования отображаемой информации (ФОИ), ввода-вывода и управления информационным обменом (ВВУИО), а также подключаемый к КИО, на время начальной выставки БИНС, навигационный комплекс корабля (НКК), состоящий из комплекта систем инерциальной навигации и стабилизации и устройства вычисления, преобразования и передачи информации, отличающаяся тем, что она дополнительно снабжена введенными в состав ВС вычислительно-логическими модулями формирования параметров движения корабля, формирования параметров начальной ориентации, оценки состояния моря и оценки длительности выставки и погрешностей БИНС, взаимосоединенными между собой и с вычислительно-логическими модулями ОБД, ФНПП, ФОИ и ВВУИО по МВИО.
2. Комплексная система подготовки и навигации летательного аппарата по п.1, отличающаяся тем, что она дополнительно снабжена введенным в состав ВС вычислительно-логическим модулем имитации данных навигационного комплекса корабля, взаимосоединенным с вычислительно-логическими модулями ОБД, ФНПП, ФОИ, ВВУИО, ФПК, ФНО, оценки длительности выставки погрешностей (ОДП) и оценки состояния моря (ОСМ) по МВИО.
3. Комплексная система подготовки и навигации летательного аппарата по п.1, отличающаяся тем, что она дополнительно снабжена введенными в состав ВС вычислительно-логическими модулями формирования параметров рекомендуемой траектории и формирования сигналов управления траекторией, взаимосоединенными между собой и с вычислительно-логическими модулями ФНПП, ФОИ, ВВУИО и ОДП по МВИО.
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА АВИАНОСНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ | 2005 |
|
RU2276328C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1998 |
|
RU2146804C1 |

